JP2009132500A - 記録媒体搬送装置、及び、これを含む記録装置 - Google Patents
記録媒体搬送装置、及び、これを含む記録装置 Download PDFInfo
- Publication number
- JP2009132500A JP2009132500A JP2007309894A JP2007309894A JP2009132500A JP 2009132500 A JP2009132500 A JP 2009132500A JP 2007309894 A JP2007309894 A JP 2007309894A JP 2007309894 A JP2007309894 A JP 2007309894A JP 2009132500 A JP2009132500 A JP 2009132500A
- Authority
- JP
- Japan
- Prior art keywords
- cleaning
- recording medium
- reading
- transport
- belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004140 cleaning Methods 0.000 claims abstract description 301
- 230000002093 peripheral effect Effects 0.000 claims description 38
- 239000007788 liquid Substances 0.000 claims description 35
- 238000011084 recovery Methods 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 10
- 239000011148 porous material Substances 0.000 claims description 7
- 230000000149 penetrating effect Effects 0.000 claims description 5
- 230000004323 axial length Effects 0.000 claims description 4
- 238000007599 discharging Methods 0.000 claims description 4
- 230000002787 reinforcement Effects 0.000 claims description 2
- 230000001131 transforming effect Effects 0.000 claims 1
- 230000032258 transport Effects 0.000 description 56
- 239000000976 ink Substances 0.000 description 37
- 238000011010 flushing procedure Methods 0.000 description 21
- 239000000853 adhesive Substances 0.000 description 16
- 230000001070 adhesive effect Effects 0.000 description 16
- 238000007689 inspection Methods 0.000 description 15
- 238000003825 pressing Methods 0.000 description 10
- 230000007547 defect Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- 238000011144 upstream manufacturing Methods 0.000 description 6
- 238000003384 imaging method Methods 0.000 description 3
- 239000000428 dust Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000009423 ventilation Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 239000012779 reinforcing material Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/165—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles
- B41J2/16585—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles for paper-width or non-reciprocating print heads
Landscapes
- Ink Jet (AREA)
- Accessory Devices And Overall Control Thereof (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Handling Of Sheets (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
Abstract
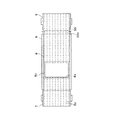
【解決手段】搬送ベルト8を挟んで画像センサ41と対向する位置に清掃ローラ50が配置されている。搬送ベルト8には貫通穴8xが形成されており、画像センサ清掃モードにおいて、画像センサ41を移動させることなく固定した状態で、清掃ローラ50を貫通穴8xに挿入し画像センサ41に接触させる。
【選択図】図4
Description
2 インクジェットヘッド
6,7 ベルトローラ(支持体)
8 搬送ベルト(搬送部材)
8x 貫通穴
8y 吸引孔
30 吸引ファン(吸引部)
41 画像センサ(読取部材)
50 清掃ローラ(清掃部材)
60 粘着ローラ(回復部)
80 洗浄液供給ポンプ(洗浄液供給部)
100 インクジェットプリンタ(記録装置)
142 搬送制御部(搬送制御手段)
143 画像センサ清掃制御部(清掃制御手段)
144 ベルト裏面清掃制御部(裏面清掃制御手段)
145 ベルトローラ清掃制御部(支持体清掃制御手段)
146 洗浄液供給制御部(洗浄液供給制御手段)
148 フラッシング制御部(回復制御手段)
Claims (16)
- 表面と前記表面とは反対側の裏面とに亘って貫通する貫通穴を有すると共に、前記表面上において記録媒体を搬送する搬送部材と、
前記搬送部材の前記表面に対向配置され、前記表面及び前記表面上の記録媒体のいずれかの画像を読み取る読取部材と、
前記搬送部材の前記裏面に対向配置され、前記搬送部材を挟んで前記読取部材と対向する位置に配置された、前記読取部材を清掃する清掃部材と、
前記貫通穴が前記清掃部材と前記読取部材との間に配置された清掃位置を前記搬送部材が取るように、前記搬送部材の駆動を制御する搬送制御手段と、
前記搬送部材が前記清掃位置にあるときに前記清掃部材が前記読取部材を清掃するように、前記清掃部材の駆動を制御する清掃制御手段と、
を備えていることを特徴とする記録媒体搬送装置。 - 前記貫通穴が、前記清掃部材が挿入可能な大きさを有し、
前記清掃制御手段が、前記清掃部材が前記貫通穴に挿入されて前記読取部材に接触するように、前記清掃部材の駆動を制御することを特徴とする請求項1に記載の記録媒体搬送装置。 - 前記清掃部材がローラであり、
前記清掃制御手段が、前記清掃部材が前記読取部材に接触しつつ回転するように、前記清掃部材の駆動を制御することを特徴とする請求項2に記載の記録媒体搬送装置。 - 前記清掃部材が、前記搬送部材の前記裏面に平行で且つ前記搬送部材による前記記録媒体の搬送方向と直交する方向に軸を有すると共に、その軸方向の長さが前記読取部材の当該方向の長さ以上であり、
前記清掃制御手段が、前記清掃部材が前記読取部材の前記軸方向の長さ方向に亘って前記読取部材に接触しつつ回転するように、前記清掃部材の駆動を制御することを特徴とする請求項3に記載の記録媒体搬送装置。 - 前記清掃部材における前記読取部材と接触する部分が弾性を有し、
前記清掃制御手段が、前記清掃部材が押圧により変形しつつ前記読取部材に接触するように、前記清掃部材の駆動を制御することを特徴とする請求項2〜4のいずれか一項に記載の記録媒体搬送装置。 - 前記清掃部材における前記読取部材と接触する部分が多孔質材料からなることを特徴とする請求項2〜5のいずれか一項に記載の記録媒体搬送装置。
- 前記清掃部材の前記部分に洗浄液を供給する洗浄液供給部と、
前記清掃部材が前記読取部材を清掃する前に、前記洗浄液供給部を駆動する洗浄液供給制御手段と、
をさらに備えていることを特徴とする請求項6に記載の記録媒体搬送装置。 - 前記清掃部材の清掃力を回復する回復部をさらに備えていることを特徴とする請求項1〜7のいずれか一項に記載の記録媒体搬送装置。
- 前記搬送制御手段が、前記読取部材による前記貫通穴の検出に応じて、前記搬送部材が停止するように前記搬送部材の駆動を制御することを特徴とする請求項1〜8のいずれか一項に記載の記録媒体搬送装置。
- 前記清掃部材が前記搬送部材の前記裏面に接触するように前記清掃部材の駆動を制御する裏面清掃制御手段をさらに備えていることを特徴とする請求項2〜9のいずれか一項に記載の記録媒体搬送装置。
- 前記裏面清掃制御手段は、前記搬送部材が駆動しているときに、前記清掃部材が前記搬送部材の前記裏面に接触するように前記清掃部材の駆動を制御することを特徴とする請求項10に記載の記録媒体搬送装置。
- 前記搬送部材が、前記表面と前記裏面とに亘って貫通する複数の吸引孔を有し、
前記記録媒体が前記搬送部材の前記表面に吸着されるよう、前記吸引孔を介して空気を吸引する吸引部をさらに備えていることを特徴とする請求項10又は11に記載の記録媒体搬送装置。 - 前記搬送部材が、2以上の支持体に架け渡されるように巻回され、前記支持体の駆動により走行するエンドレスベルトであって、
前記清掃部材が前記支持体に接触するように前記清掃部材の駆動を制御する支持体清掃制御手段をさらに備えていることを特徴とする請求項2〜12のいずれか一項に記載の記録媒体搬送装置。 - 前記支持体清掃制御手段は、前記支持体が駆動しているときに、前記清掃部材が前記支持体に接触するように前記清掃部材の駆動を制御することを特徴とする請求項13に記載の記録媒体搬送装置。
- 前記搬送部材における前記貫通穴の周縁に補強が施されていることを特徴とする請求項1〜14のいずれか一項に記載の記録媒体搬送装置。
- 請求項1〜15のいずれか一項に記載の記録媒体搬送装置と、
液体を吐出する吐出面が前記搬送部材の前記表面に対向配置された記録ヘッドと、
前記貫通穴が前記吐出面と対向したときに前記吐出面から液体を吐出させる回復制御手段と、
を備えている記録装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007309894A JP2009132500A (ja) | 2007-11-30 | 2007-11-30 | 記録媒体搬送装置、及び、これを含む記録装置 |
| US12/324,395 US8052246B2 (en) | 2007-11-30 | 2008-11-26 | Recording device and recording medium conveying method |
| CN2008101797152A CN101444996B (zh) | 2007-11-30 | 2008-11-28 | 记录介质输送设备和具有记录介质输送设备的记录设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007309894A JP2009132500A (ja) | 2007-11-30 | 2007-11-30 | 記録媒体搬送装置、及び、これを含む記録装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009132500A true JP2009132500A (ja) | 2009-06-18 |
Family
ID=40675263
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007309894A Pending JP2009132500A (ja) | 2007-11-30 | 2007-11-30 | 記録媒体搬送装置、及び、これを含む記録装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8052246B2 (ja) |
| JP (1) | JP2009132500A (ja) |
| CN (1) | CN101444996B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010073693A1 (ja) | 2008-12-26 | 2010-07-01 | シャープ株式会社 | 液晶表示装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5460382B2 (ja) * | 2010-02-26 | 2014-04-02 | キヤノン株式会社 | シート搬送装置及び画像形成装置 |
| EP2371551B1 (en) | 2010-03-29 | 2018-10-17 | Brother Kogyo Kabushiki Kaisha | Liquid ejection apparatus |
| DE102015204215A1 (de) * | 2015-03-10 | 2016-09-15 | Heidelberger Druckmaschinen Ag | Druckmaschine mit Transportsystem |
| EP4041559A4 (en) * | 2019-10-07 | 2023-06-14 | Hewlett-Packard Development Company, L.P. | PRINTING DEVICE |
| CN114536993A (zh) * | 2020-11-25 | 2022-05-27 | 尼德克株式会社 | 带染料基体制造装置及染色系统 |
| CN113431123A (zh) * | 2021-06-29 | 2021-09-24 | 倪宏禹 | 一种水利工程用河底杂质清理装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5834475A (ja) * | 1981-08-25 | 1983-02-28 | Ricoh Co Ltd | ベルト状部材の駆動装置 |
| JP2001287377A (ja) * | 2000-04-07 | 2001-10-16 | Seiko Instruments Inc | インクジェット記録装置 |
| JP2005104143A (ja) * | 2003-09-10 | 2005-04-21 | Fuji Photo Film Co Ltd | インクジェット記録装置及びインク吐出面清掃方法並びに清掃装置 |
| JP2006095881A (ja) * | 2004-09-29 | 2006-04-13 | Fuji Photo Film Co Ltd | 液体吐出装置及び画像形成装置 |
| JP2007031004A (ja) * | 2005-07-22 | 2007-02-08 | Konica Minolta Holdings Inc | インクジェット記録装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006187979A (ja) | 2005-01-07 | 2006-07-20 | Canon Inc | インクジェット記録装置 |
-
2007
- 2007-11-30 JP JP2007309894A patent/JP2009132500A/ja active Pending
-
2008
- 2008-11-26 US US12/324,395 patent/US8052246B2/en not_active Expired - Fee Related
- 2008-11-28 CN CN2008101797152A patent/CN101444996B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5834475A (ja) * | 1981-08-25 | 1983-02-28 | Ricoh Co Ltd | ベルト状部材の駆動装置 |
| JP2001287377A (ja) * | 2000-04-07 | 2001-10-16 | Seiko Instruments Inc | インクジェット記録装置 |
| JP2005104143A (ja) * | 2003-09-10 | 2005-04-21 | Fuji Photo Film Co Ltd | インクジェット記録装置及びインク吐出面清掃方法並びに清掃装置 |
| JP2006095881A (ja) * | 2004-09-29 | 2006-04-13 | Fuji Photo Film Co Ltd | 液体吐出装置及び画像形成装置 |
| JP2007031004A (ja) * | 2005-07-22 | 2007-02-08 | Konica Minolta Holdings Inc | インクジェット記録装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010073693A1 (ja) | 2008-12-26 | 2010-07-01 | シャープ株式会社 | 液晶表示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8052246B2 (en) | 2011-11-08 |
| US20090141070A1 (en) | 2009-06-04 |
| CN101444996B (zh) | 2011-10-05 |
| CN101444996A (zh) | 2009-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5176570B2 (ja) | 記録装置および制御方法 | |
| JP2009132500A (ja) | 記録媒体搬送装置、及び、これを含む記録装置 | |
| JP4100198B2 (ja) | インクジェットプリンタ | |
| JP4321515B2 (ja) | インクジェット記録装置 | |
| JP4968357B2 (ja) | 記録装置、制御装置、及び、プログラム | |
| JP2009096099A (ja) | 画像記録装置 | |
| JP5012650B2 (ja) | 記録装置 | |
| JP4678010B2 (ja) | ベルト搬送装置及びこれを備えた液体吐出装置 | |
| JP4964812B2 (ja) | ヘッド洗浄機構および画像記録装置 | |
| JP5262365B2 (ja) | 液体吐出記録装置及びインクジェット記録装置 | |
| JP5567374B2 (ja) | インクジェット記録装置 | |
| JP2004291482A (ja) | 画像形成装置及びそのキャップ装置 | |
| JP5454428B2 (ja) | 画像形成装置 | |
| JP5918716B2 (ja) | ベルトクリーニング装置及び画像形成装置 | |
| JP2011161638A (ja) | インクジェット記録装置 | |
| JP2009132057A (ja) | 記録装置 | |
| JP2009172952A (ja) | 記録装置 | |
| JP2010099851A (ja) | 液体噴射装置 | |
| JP2009172827A (ja) | インクジェット記録装置 | |
| JP5744279B2 (ja) | インクジェット記録装置、インクジェット記録装置における記録媒体離脱方法 | |
| JP2009155023A (ja) | 記録媒体搬送装置及び記録装置 | |
| JP5701192B2 (ja) | インクジェット記録装置、インクジェット記録装置における記録媒体離脱方法 | |
| JP2009184122A (ja) | 記録装置および制御方法 | |
| JP2023068786A (ja) | インクジェット記録装置 | |
| JP2009196341A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120110 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120207 |