JP2009018706A - 制御装置 - Google Patents
制御装置 Download PDFInfo
- Publication number
- JP2009018706A JP2009018706A JP2007183132A JP2007183132A JP2009018706A JP 2009018706 A JP2009018706 A JP 2009018706A JP 2007183132 A JP2007183132 A JP 2007183132A JP 2007183132 A JP2007183132 A JP 2007183132A JP 2009018706 A JP2009018706 A JP 2009018706A
- Authority
- JP
- Japan
- Prior art keywords
- brake
- vehicle
- power source
- force
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/122—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger for locking of reverse movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18027—Drive off, accelerating from standstill
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
- B60W30/18118—Hill holding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/06—Hill holder; Start aid systems on inclined road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope
Abstract
重力加速度の路面の斜面成分を算出し、重力加速度の路面の斜面成分に基づいて、ブレーキ力又は駆動力を制御して、坂路発進時の車両の後退防止することのできる制御装置を提供する。
【解決手段】
制御装置において、車速を検出する車速センサと、車速センサの検出結果に基づいて車両の停車状態を判定する停車判定手段とを備え、コントローラは、停車判定手段が停車状態を判定している時に、動力源出力センサで検出された動力源の出力及びブレーキトルクセンサで検出されたブレーキトルクに基づいて重力加速度の車両が走行している走行路面の車両前後方向の傾斜成分を演算し、該演算結果に基づいて車両発進時において動力源の出力乃至ブレーキ力を制御する。
【選択図】図2
Description
また、図4(c)に示すように、降坂路後退では、駆動力Fdと斜面成分Fgとが反対方向の力であるので、ブレーキ力Fbは、駆動力Fdと同方向に車輪18FL〜18RRに作用して、登坂路前進と同様に式(2)が成り立つときに車体1は停止する。
駆動力Fd(N/Kg)は、エンジン2の回転数、スロットル開度、トルクコンバータを有する自動変速機7においてはエンジン回転数とメインシャフト回転数により算出されるトルコン増幅率又はトルクコンバータを有しない自動変速機7においてはクラッチの締結量から算出される駆動トルクTdと自動変速機7の変速比と最終減速比との積を、車輪のタイヤ半径と荷重との積で除算することにより得られる。
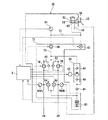
ブレーキ力制御手段110は、常閉型電磁弁87を閉弁し、常開型電磁弁76,78を開弁し、常閉型電磁弁84,86を閉弁するとともに、図示しないテーブルにブレーキ力と該ブレーキ力を発揮せしめるための比例型常開型電磁弁88の通電量との関係が予めテーブルに格納され、目標ブレーキ力Fb*を発揮させるために必要なブレーキ液圧となるように相当の通電量で比例型常開型電磁弁88を駆動して、比例型電磁弁88を徐々に開弁し、ブレーキペダル12の開放によりブレーキ液圧が減少しているマスタシリンダ52側へホイールシリンダからのブレーキ液圧の流入量を制御することにより、目標ブレーキ力Fb*を発揮せしめる。これにより、ホイールシリンダのブレーキ液圧が、アクセルペダル14の踏み込みによる駆動力が増加するに伴い、徐々に減少して停車目標ブレーキ力Fb*が発生し、式(3)が成り立ち、車体1の停止状態が維持される。
駆動力制御手段156は、スロットル弁駆動装置6を制御して、目標駆動トルクTd*が発揮されるように、スロットル弁4を駆動してスロットル開度を調整する。これにより、車体1に目標駆動力Fd*に等しい駆動力が発揮されて、発揮した駆動力Fdとブレーキ力Fbの和が重力加速度斜面成分Fgに等しくなって、車体1が後ずさりすることなく停止する。また、ブレーキペダル12が開放されてブレーキ力Fbが零になると、式(4)より、目標駆動力Fd*は重力加速度斜面成分Fgに等しくなり、アクセルペダル14が踏み込まれるまでは、重力加速度斜面成分Fdに等しい駆動力Fdが発揮・維持される。アクセルペダル14が踏み込まれると、アクセルペダル14の踏み込み量に応じた駆動トルクに重力加速度斜面成分Fgに等しい駆動力相当の駆動トルクを追加する。
6 スロットル弁駆動装置
8 ECU
10 液圧式ブレーキ装置
16FL、16FR、16RL、16RR 車輪
18FL、18FR、18RL、18RR ブレーキ
20FL、20FR、20RL、20RR ブレーキトルクセンサ
22FL、22FR、22RL、22RR 車輪速度センサ
100,150 停車判定手段
102,152 重力加速度斜面成分算出手段
104 ヒルホールド制御手段
106 アクセルペダル踏み込み判定手段
108 停車目標ブレーキ力算出手段
110 ブレーキ力制御手段
154 停車目標駆動力算出手段
156 駆動力制御手段
Claims (3)
- 動力源と、前記動力源の出力を検出する動力源出力センサと、運転者により操作され、前記動力源の出力を調整するための動力源操作手段と、車輪ブレーキと、運転者により操作され、前記車輪ブレーキを操作するためのブレーキ操作手段と、前記車輪ブレーキが発生しているブレーキトルクを検出するブレーキトルクセンサと、前記動力源の出力及び前記車輪ブレーキのブレーキ力を調整可能なアクチュエータを制御するコントローラとを備えた制御装置において、
車速を検出する車速センサと、
前記車速センサの検出結果に基づいて車両の停車状態を判定する停車判定手段とを備え、
前記コントローラは、前記停車判定手段が車両の停車状態であると判定している時に、前記動力源出力センサで検出された前記動力源の出力及び前記ブレーキトルクセンサで検出されたブレーキトルクに基づいて、車両が走行している走行路面の車両前後方向の重力加速度の傾斜成分を演算し、該演算結果に基づいて、前記ブレーキ操作手段の操作及び前記動力源操作手段の操作に基づく車両発進時において、前記動力源の出力及び前記ブレーキ力のいずれか一方を制御することを特徴とする制御装置。 - 前記コントローラは、前記ブレーキ操作手段の運転者の操作によるブレーキ操作に基づき前記車輪ブレーキ力が所定値に減少した所定の時点から前記動力源操作手段が運転者により操作されるまでは、車両の停止に必要とされる車輪ブレーキ力が一定に保持されるように前記アクチュエータを制御し、前記動力源操作手段が操作されてからは、前記動力源操作手段の運転者による操作に基づいて発揮される駆動力及び前記傾斜成分に基づいて、車両を停止するのに必要な車輪ブレーキ力が発揮されるように前記アクチュエータを制御することを特徴とする請求項1記載の制御装置。
- 前記コントローラは、前記ブレーキ操作手段の運転者の操作によりブレーキ操作に基づき前記車輪ブレーキ力が減少するときには、前記ブレーキトルクセンサにより検出されたブレーキトルク及び前記傾斜成分に基づいて、車両の停止に必要とされる駆動力が発揮されるように前記アクチュエータを制御することを特徴とする請求項1記載の制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007183132A JP2009018706A (ja) | 2007-07-12 | 2007-07-12 | 制御装置 |
| US12/170,661 US7979190B2 (en) | 2007-07-12 | 2008-07-10 | Control system |
| EP08012621A EP2014526B1 (en) | 2007-07-12 | 2008-07-11 | Control system for motor vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007183132A JP2009018706A (ja) | 2007-07-12 | 2007-07-12 | 制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009018706A true JP2009018706A (ja) | 2009-01-29 |
Family
ID=39810151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007183132A Pending JP2009018706A (ja) | 2007-07-12 | 2007-07-12 | 制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7979190B2 (ja) |
| EP (1) | EP2014526B1 (ja) |
| JP (1) | JP2009018706A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014193644A (ja) * | 2013-03-28 | 2014-10-09 | Fuji Heavy Ind Ltd | 車両の前後進判定装置 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9604526B2 (en) * | 2008-12-05 | 2017-03-28 | Ford Global Technologies, Llc | Method for providing improved driveability for a vehicle |
| US8573714B2 (en) * | 2009-02-06 | 2013-11-05 | Toyota Jidosha Kabushiki Kaisha | Brake device |
| JP5308913B2 (ja) * | 2009-05-19 | 2013-10-09 | 富士重工業株式会社 | 車両の駆動力制御装置 |
| JP2011141909A (ja) * | 2009-06-18 | 2011-07-21 | Sony Corp | 対物レンズ、光ピックアップ及び光ディスク装置 |
| US20110169323A1 (en) * | 2010-01-13 | 2011-07-14 | Ford Global Technologies, Llc | Vehicle Launch Startup Clutch Protection on a Grade |
| DE102010001045B4 (de) * | 2010-01-20 | 2020-12-03 | Robert Bosch Gmbh | Anfahrassistent für Kraftfahrzeuge |
| DE102010001941A1 (de) * | 2010-02-15 | 2011-08-18 | Robert Bosch GmbH, 70469 | Verfahren zum Betreiben eines bremskraftverstärkten hydraulischen Bremssystems eines Fahrzeugs und Steuervorrichtung für ein bremskraftverstärktes hydraulisches Bremssystem eines Fahrzeugs |
| GB2483719B (en) * | 2010-09-20 | 2013-06-19 | Land Rover Uk Ltd | Improvements relating to brake control |
| JP2012162146A (ja) * | 2011-02-04 | 2012-08-30 | Toyota Motor Corp | 自動車 |
| JP5477316B2 (ja) * | 2011-03-16 | 2014-04-23 | 株式会社アドヴィックス | 車両ずり下がり状態判定装置およびそれを備えた車両制御装置 |
| CN102167020B (zh) * | 2011-03-29 | 2016-08-03 | 奇瑞汽车股份有限公司 | 一种基于线控制动系统的制动力的调节方法 |
| JP5549660B2 (ja) * | 2011-11-10 | 2014-07-16 | トヨタ自動車株式会社 | 車両の制御装置 |
| GB2509736A (en) * | 2013-01-11 | 2014-07-16 | Gm Global Tech Operations Inc | System and method for controlling engagement of a clutch when a vehicle is at standstill and based on the gradient on which the vehicle stands |
| US20140249729A1 (en) * | 2013-03-01 | 2014-09-04 | Caterpillar Inc. | Hill Start in a Vehicle |
| US9126597B2 (en) * | 2013-03-14 | 2015-09-08 | Robert Bosch Gmbh | Hill hold decay |
| EP2979938B1 (en) * | 2013-03-29 | 2019-08-07 | Autoliv Nissin Brake Systems Japan Co., Ltd. | Vehicle brake fluid pressure control device |
| KR101470145B1 (ko) * | 2013-04-23 | 2014-12-05 | 현대자동차주식회사 | 가속페달 장치의 답력 능동 조절방법 |
| DE102014207628A1 (de) * | 2014-04-23 | 2015-10-29 | Continental Teves Ag & Co. Ohg | Verfahren zur Ermittlung eines Offsets eines Inertialsensors |
| US10112613B2 (en) * | 2016-02-12 | 2018-10-30 | Ford Global Technologies, Llc | Systems and methods for managing torque |
| JP6550663B2 (ja) * | 2016-11-04 | 2019-07-31 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| EP3466782B1 (en) | 2017-10-06 | 2021-08-25 | Perkins Engines Company Limited | A launch control method for a vehicle |
| CN109605376A (zh) * | 2019-01-11 | 2019-04-12 | 北京猎户星空科技有限公司 | 一种机器人控制方法、装置、设备及介质 |
| FR3096638A1 (fr) * | 2019-05-29 | 2020-12-04 | Psa Automobiles Sa | Procede de limitation du recul en pente d'un vehicule automobile hybride, dote d’une loi de commande |
| CN114655020A (zh) * | 2020-12-23 | 2022-06-24 | 瀚德万安(上海)电控制动系统有限公司 | 自动驻车的控制方法、车辆的制动系统及其制动控制模块 |
| CN114132307B (zh) * | 2021-12-22 | 2024-01-09 | 广州小鹏自动驾驶科技有限公司 | 一种车辆自动泊车控制方法和装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62198530A (ja) * | 1986-02-27 | 1987-09-02 | Aisin Seiki Co Ltd | 自動クラッチ制御装置 |
| JPH0396468A (ja) * | 1989-09-07 | 1991-04-22 | Honda Motor Co Ltd | 車体の前後加・減速度推定方法 |
| JPH0769102A (ja) * | 1993-09-03 | 1995-03-14 | Toyota Motor Corp | 坂路停車装置 |
| JP2000009157A (ja) * | 1998-06-22 | 2000-01-11 | Honda Motor Co Ltd | 車両用クラッチ制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100367573B1 (ko) * | 1992-08-27 | 2003-03-08 | 가부시끼가이샤 히다치 세이사꾸쇼 | 경사추정장치및경사대응차량제어장치및방법및이들을사용한차량 |
| DE19802216A1 (de) * | 1997-10-17 | 1999-04-22 | Itt Mfg Enterprises Inc | Verfahren und Vorrichtung zum Ermitteln einer extern verursachten, ein Fahrzeug antreibenden oder bremsenden Größe, insbesondere eines solchen Moments |
| JP2003182404A (ja) * | 2001-12-17 | 2003-07-03 | Aisin Seiki Co Ltd | 電動車輌の坂路停止制御装置 |
| US7032697B2 (en) * | 2002-05-30 | 2006-04-25 | Hyeongcheol Lee | Drive control system for vehicles with an auxiliary driving system |
| JP4126239B2 (ja) * | 2003-02-04 | 2008-07-30 | パイオニア株式会社 | 角速度検出装置 |
| US20050017580A1 (en) | 2003-07-23 | 2005-01-27 | Ford Global Technologies, Llc. | Hill holding brake system for hybrid electric vehicles |
| JP2006088732A (ja) * | 2004-09-21 | 2006-04-06 | Honda Motor Co Ltd | ブレーキ力保持装置 |
-
2007
- 2007-07-12 JP JP2007183132A patent/JP2009018706A/ja active Pending
-
2008
- 2008-07-10 US US12/170,661 patent/US7979190B2/en not_active Expired - Fee Related
- 2008-07-11 EP EP08012621A patent/EP2014526B1/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62198530A (ja) * | 1986-02-27 | 1987-09-02 | Aisin Seiki Co Ltd | 自動クラッチ制御装置 |
| JPH0396468A (ja) * | 1989-09-07 | 1991-04-22 | Honda Motor Co Ltd | 車体の前後加・減速度推定方法 |
| JPH0769102A (ja) * | 1993-09-03 | 1995-03-14 | Toyota Motor Corp | 坂路停車装置 |
| JP2000009157A (ja) * | 1998-06-22 | 2000-01-11 | Honda Motor Co Ltd | 車両用クラッチ制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014193644A (ja) * | 2013-03-28 | 2014-10-09 | Fuji Heavy Ind Ltd | 車両の前後進判定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2014526A1 (en) | 2009-01-14 |
| US20090018739A1 (en) | 2009-01-15 |
| US7979190B2 (en) | 2011-07-12 |
| EP2014526B1 (en) | 2011-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009018706A (ja) | 制御装置 | |
| US7317980B2 (en) | Automatic brake device for controlling movement of vehicle in direction opposite to intended direction of movement of driver | |
| JP5983871B2 (ja) | ブレーキ装置 | |
| US9193338B2 (en) | Pressure-medium-activated brake device of a vehicle having control routines implemented in a brake controller unit, of a hill start assistant function or creep suppression function | |
| US9132819B2 (en) | Vehicle control apparatus | |
| US7561954B2 (en) | Creep drive control device for driving vehicle at creep speed | |
| US6233514B1 (en) | Method for controlling the downhill speed of an off-the-road vehicle | |
| US9020725B2 (en) | Brake control system and method for motor vehicles | |
| SE533184C2 (sv) | Retarderstyrsystem för arbetsfordon | |
| JP2013531575A (ja) | 自動車の電気油圧式のブレーキシステムを調整するための方法及び装置 | |
| JP5295750B2 (ja) | ブレーキ装置の制御装置 | |
| JPH1059147A (ja) | 自動車におけるブレーキ作用の制御装置 | |
| JP2000108861A (ja) | 斜面上に存在する車両の後方転がり移動防止装置および方法 | |
| JP2001130390A (ja) | 車両の制御方法および装置 | |
| JP4300920B2 (ja) | 自動ブレーキ装置 | |
| US20170210368A1 (en) | System and method for operating a vehicle brake | |
| US8915555B2 (en) | Brake control device for vehicle | |
| JP4479593B2 (ja) | 車両用ブレーキ装置 | |
| JP2008110619A (ja) | 車両用制動制御装置 | |
| JP4736704B2 (ja) | 制動制御装置 | |
| JP2003011800A (ja) | ブレーキ制御装置 | |
| JP4982280B2 (ja) | ブレーキ装置 | |
| JP2010012878A (ja) | 輪荷重比検知装置 | |
| JP2009274582A (ja) | アンチロック制御装置 | |
| KR19990037714U (ko) | 자동차의 노즈 다운(nose-down) 방지 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091127 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101208 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20101224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110121 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110524 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110830 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111028 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111129 |