JP2009002911A - 電流センサおよびその製造方法 - Google Patents
電流センサおよびその製造方法 Download PDFInfo
- Publication number
- JP2009002911A JP2009002911A JP2007166576A JP2007166576A JP2009002911A JP 2009002911 A JP2009002911 A JP 2009002911A JP 2007166576 A JP2007166576 A JP 2007166576A JP 2007166576 A JP2007166576 A JP 2007166576A JP 2009002911 A JP2009002911 A JP 2009002911A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- current sensor
- magnetoresistive
- elements
- layer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004519 manufacturing process Methods 0.000 title claims description 22
- 230000005291 magnetic effect Effects 0.000 claims abstract description 260
- 230000005415 magnetization Effects 0.000 claims abstract description 100
- 239000000758 substrate Substances 0.000 claims abstract description 96
- 238000001514 detection method Methods 0.000 claims abstract description 60
- 230000000694 effects Effects 0.000 claims description 76
- 230000006698 induction Effects 0.000 claims description 47
- 239000004020 conductor Substances 0.000 claims description 37
- 230000008859 change Effects 0.000 claims description 32
- 230000005294 ferromagnetic effect Effects 0.000 claims description 18
- 230000008878 coupling Effects 0.000 claims description 7
- 238000010168 coupling process Methods 0.000 claims description 7
- 238000005859 coupling reaction Methods 0.000 claims description 7
- 239000010409 thin film Substances 0.000 abstract description 52
- 125000006850 spacer group Chemical group 0.000 abstract description 5
- 238000010030 laminating Methods 0.000 abstract description 3
- 230000001939 inductive effect Effects 0.000 abstract 1
- 239000010410 layer Substances 0.000 description 162
- 239000010408 film Substances 0.000 description 39
- 238000000034 method Methods 0.000 description 16
- 238000004804 winding Methods 0.000 description 14
- 239000010949 copper Substances 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000007423 decrease Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 230000035945 sensitivity Effects 0.000 description 6
- 239000013598 vector Substances 0.000 description 6
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 5
- 229910052802 copper Inorganic materials 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 229920006395 saturated elastomer Polymers 0.000 description 5
- 230000005290 antiferromagnetic effect Effects 0.000 description 4
- 238000009826 distribution Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 3
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 239000000696 magnetic material Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 229910003321 CoFe Inorganic materials 0.000 description 2
- 229910000914 Mn alloy Inorganic materials 0.000 description 2
- 239000012790 adhesive layer Substances 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 2
- 238000007747 plating Methods 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 229910001313 Cobalt-iron alloy Inorganic materials 0.000 description 1
- 240000006829 Ficus sundaica Species 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000000137 annealing Methods 0.000 description 1
- 239000002885 antiferromagnetic material Substances 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 229910052735 hafnium Inorganic materials 0.000 description 1
- VBJZVLUMGGDVMO-UHFFFAOYSA-N hafnium atom Chemical compound [Hf] VBJZVLUMGGDVMO-UHFFFAOYSA-N 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- SHMWNGFNWYELHA-UHFFFAOYSA-N iridium manganese Chemical compound [Mn].[Ir] SHMWNGFNWYELHA-UHFFFAOYSA-N 0.000 description 1
- IGOJMROYPFZEOR-UHFFFAOYSA-N manganese platinum Chemical compound [Mn].[Pt] IGOJMROYPFZEOR-UHFFFAOYSA-N 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 229910052715 tantalum Inorganic materials 0.000 description 1
- GUVRBAGPIYLISA-UHFFFAOYSA-N tantalum atom Chemical compound [Ta] GUVRBAGPIYLISA-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/093—Magnetoresistive devices using multilayer structures, e.g. giant magnetoresistance sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y25/00—Nanomagnetism, e.g. magnetoimpedance, anisotropic magnetoresistance, giant magnetoresistance or tunneling magnetoresistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R15/00—Details of measuring arrangements of the types provided for in groups G01R17/00 - G01R29/00, G01R33/00 - G01R33/26 or G01R35/00
- G01R15/14—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks
- G01R15/20—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using galvano-magnetic devices, e.g. Hall-effect devices, i.e. measuring a magnetic field via the interaction between a current and a magnetic field, e.g. magneto resistive or Hall effect devices
- G01R15/205—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using galvano-magnetic devices, e.g. Hall-effect devices, i.e. measuring a magnetic field via the interaction between a current and a magnetic field, e.g. magneto resistive or Hall effect devices using magneto-resistance devices, e.g. field plates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F10/00—Thin magnetic films, e.g. of one-domain structure
- H01F10/32—Spin-exchange-coupled multilayers, e.g. nanostructured superlattices
- H01F10/324—Exchange coupling of magnetic film pairs via a very thin non-magnetic spacer, e.g. by exchange with conduction electrons of the spacer
- H01F10/3268—Exchange coupling of magnetic film pairs via a very thin non-magnetic spacer, e.g. by exchange with conduction electrons of the spacer the exchange coupling being asymmetric, e.g. by use of additional pinning, by using antiferromagnetic or ferromagnetic coupling interface, i.e. so-called spin-valve [SV] structure, e.g. NiFe/Cu/NiFe/FeMn
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F17/00—Fixed inductances of the signal type
- H01F17/0006—Printed inductances
- H01F17/0033—Printed inductances with the coil helically wound around a magnetic core
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Crystallography & Structural Chemistry (AREA)
- Nanotechnology (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Hall/Mr Elements (AREA)
- Measuring Instrument Details And Bridges, And Automatic Balancing Devices (AREA)
Abstract
【解決手段】第1および第2のモジュール10,20は、それぞれ、スペーサ103,104を介して対向配置された集積基板101,102の対向する面101S,102Sに設けられている。第1および第2のモジュール10,20は、それぞれ、素子基板11,21とMR素子層12,22と薄膜コイル層13,23とを備える。MR素子層12,22には、一定方向に固着された磁化方向を有する固着層と、非磁性の中間層と、誘導磁界に応じて磁化方向が変化すると共に固着層の磁化方向と異なる方向の異方性磁界を発現する自由層とを含む積層構造をそれぞれ有するMR素子が設けられている。ここで、それらの積層構造は、その積層面に沿った同一階層に設けられている。
【選択図】図3
Description
(A1)一の基体上に、一定方向の異方性磁界を発現すると共に誘導磁界に応じて磁化方向が変化する第1の強磁性層と、非磁性の中間層と、第1の強磁性層よりも大きな保磁力を有する第2の強磁性層とを順に積層してなる積層構造をそれぞれ含む複数の磁気抵抗効果素子を一括して形成する工程。
(A2)複数の磁気抵抗効果素子の全てについて、異方性磁界の方向と異なる方向となるように第2の強磁性層の磁化方向を一括して設定する工程。
(A3)基体を磁気抵抗効果素子ごとに複数に分割することで、それぞれ一の磁気抵抗効果素子が設けられた第1および第2の素子基板を取り出す工程。
(A4)第1および第2の素子基板を、磁気抵抗効果素子における各積層構造がその積層面に沿った同一階層に位置し、かつ、誘導磁界に応じて第1の素子基板における磁気抵抗効果素子の抵抗値と第2の素子基板における磁気抵抗効果素子の抵抗値とが互いに逆方向の変化を示すように配置する工程。
(B1)一の基体上に、一定方向の異方性磁界を発現すると共に誘導磁界に応じて磁化方向が変化する第1の強磁性層と、非磁性の中間層と、第1の強磁性層よりも大きな保磁力を有する第2の強磁性層とを順に積層してなる積層構造をそれぞれ含む複数の磁気抵抗効果素子を一括して形成する工程。
(B2)複数の磁気抵抗効果素子の全てについて、異方性磁界の方向と異なる方向となるように第2の強磁性層の磁化方向を一括して設定する工程。
(B3)基体を複数に分割することで、2つの磁気抵抗効果素子を各々含む第1および第2の素子モジュールを形成する工程。
(B4)第1および第2の素子モジュールを、第1から第4の磁気抵抗効果素子における各積層構造がその積層面に沿った同一階層に位置し、かつ、誘導磁界に応じて第1の素子モジュールにおける磁気抵抗効果素子の抵抗値と第2の素子モジュールにおける磁気抵抗効果素子の抵抗値とが互いに逆方向の変化を示すように配置する工程。
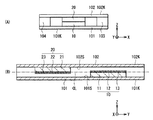
最初に、図1から図3を参照して、本発明における第1の実施の形態としての電流センサの全体構成について説明する。図1は、本実施の形態の電流センサの斜視構成を表す部分破断図であり、図2は、その分解斜視図である。なお、図2では、検出対象電流Imが供給される導体40についても併せて記載し、電流センサとの位置関係を表している。また、図3(A)は矢印IIIに沿って眺めた構成図であり、図3(B)は、第1および第2のモジュール10,20(後述)を含む断面図である。但し、図1および図3では導体40(後述)の図示を省略し、図2および図3ではコイル30(後述)の図示を省略している。
V1=I1×R1
であり、第4の接続点P14における電位V2は、
V2=I2×R2
となる。よって、第3の接続点P13と第4の接続点P14との間の電位差は、
V0=V1−V2
=I1×R1−I2×R2 …(1)
V0=I0×(R1−R2) …(2)
となる。
V0=V1−V2
=I0×(R1−R2)
=I0×{(R1+ΔR1)−(R2+ΔR2)} …(3)
となる。
R1=R2=R
かつ
ΔR1=−ΔR2=ΔR
であると仮定した場合、式(3)は、
V0=I0×(R1+ΔR1−R2−ΔR2)
=I0×(R+ΔR−R+ΔR)
=I0×(2×ΔR) …(4)
となる。したがって、外部磁界と抵抗変化量との関係が既知であるMR素子5A,5Bを用いるようにすれば、誘導磁界Hmの大きさを測定することができる。式(4)で表される電位差V0は、合成ベクトルV1,V2と、磁化J51A,J51Bとのなす角度によって決まるものである。
次に、本発明における第2の実施の形態としての電流センサの構成について説明する。本実施の形態の電流センサは、第1および第2のモジュール10,20の構成が異なることを除き、他は第1の実施の形態の電流センサと同様である。したがって、主に第1の実施の形態の電流センサとの相違点について説明することとし、それ以外の点についての説明は適宜省略する。
V=I1×R4+I1×R1=I2×R3+I2×R2
=I1×(R4+R1)=I2×(R3+R2) …(5)
と表すことができる。また、第3の接続点P13における電位V1および第4の接続点P14における電位V2は、それぞれ、
V1=V−V4
=V−I1×R4
V2=V−V3
=V−I2×R3
と表せる。よって、第3の接続点P13と第4の接続点P14との間の電位差V0は、
V0=V1−V2
=(V−I1×R4)−(V−I2×R3)
=I2×R3−I1×R4 …(6)
ここで、(5)式から
V0={R3/(R3+R2)}×V−{R4/(R4+R1)}×V
={R3/(R3+R2)−R4/(R4+R1)}×V …(7)
となる。このブリッジ回路では、誘導磁界Hmが印加されたときに、上記の式(7)で示された第3および第4の接続点P13,P14間の電圧V0を測定することにより、抵抗変化量が得られる。誘導磁界Hmが印加されたときに、抵抗値R1〜R4がそれぞれ変化量ΔR1〜ΔR1だけ増加したとすると、すなわち、抵抗値R1〜R4がそれぞれ、
R1→R1+ΔR1
R2→R2+ΔR2
R3→R3+ΔR3
R4→R4+ΔR4
のように変化したとすると、検出対象磁界Hmを印加したのちは、式(7)より、
V0={(R3+ΔR3)/(R3+ΔR3+R2+ΔR2)−(R4+ΔR4)/(R4+ΔR4+R1+ΔR1)}×V …(8)
となる。すでに述べたように、この電流センサでは、MR素子5A,5Cの抵抗値R1,R3とMR素子5B,5Dの抵抗値R2,R4とが逆方向に変化するので、変化量ΔR3と変化量ΔR2とが打ち消し合うと共に変化量ΔR4と変化量ΔR1とが打ち消し合うこととなる。このため、誘導磁界Hmの印加前後を比較した場合、式(8)の各項における分母の増加はほとんど無い。一方、各項の分子については、変化量ΔR3と変化量ΔR4とは必ず反対の符号を有するので、打ち消し合うことなく増減が現れることとなる。誘導磁界Hmが印加されることにより、MR素子5B,5Dでは、抵抗値は変化量ΔR2,ΔR4(ΔR2,ΔR4<0)の分だけそれぞれ変化する(実質的に低下する)一方で、MR素子5A,5Cでは、抵抗値は変化量ΔR1,ΔR3(ΔR1,ΔR3>0)の分だけそれぞれ変化する(実質的に増加する)からである。
R=R1=R2=R3=R4
かつ
ΔR=ΔR1=−ΔR2=ΔR3=−ΔR4
であるので、式(8)は、
V0={(R+ΔR)/(2R)−(R−ΔR)/(2R)}×V
=(ΔR/R)×V
となる。
Claims (28)
- 検出対象電流の供給により誘導磁界を発生する導体の近傍に配置され、前記検出対象電流を検出する電流センサであって、
一定方向に固着された磁化方向を有する固着層と、非磁性の中間層と、前記誘導磁界に応じて磁化方向が変化すると共に前記固着層の磁化方向と異なる方向の異方性磁界を発現する自由層とを含む積層構造をそれぞれ有する第1および第2の磁気抵抗効果素子を備え、
前記第1および第2の磁気抵抗効果素子における各積層構造が同一階層に設けられ、
前記第1の磁気抵抗効果素子の抵抗値と前記第2の磁気抵抗効果素子の抵抗値とが前記誘導磁界に応じて互いに逆方向に変化する
ことを特徴とする電流センサ。 - 前記第1の磁気抵抗効果素子の積層構造と、前記第2の磁気抵抗効果素子の積層構造とは、それらの積層面と平行な中心軸を回転中心として互いに回転対称な関係にある
ことを特徴とする請求項1に記載の電流センサ。 - 前記中心軸は、前記第1および第2の磁気抵抗効果素子の双方における自由層の異方性磁界の方向と一致している
ことを特徴とする請求項2に記載の電流センサ。 - 前記第1および第2の磁気抵抗効果素子における各自由層が全て同一階層に位置する
ことを特徴とする請求項1から請求項3のいずれか1項に記載の電流センサ。 - 前記第1および第2の磁気抵抗効果素子を保持する保持部材をさらに備え、
前記保持部材は、前記第1および第2の磁気抵抗効果素子における各積層構造の積層面と平行であり、かつ、外部に露出した基準平面を有する
ことを特徴とする請求項1から請求項4のいずれか1項に記載の電流センサ。 - 前記第1および第2の磁気抵抗効果素子は、それぞれ異なる素子基板に形成されている
ことを特徴とする請求項1から請求項4のいずれか1項に記載の電流センサ。 - 前記第1の磁気抵抗効果素子が形成された素子基板は、対向配置された一対の保持部材における一対の対向面のうちの一方に設けられ、
前記第2の磁気抵抗効果素子が形成された素子基板は、前記一対の対向面のうちの他方に設けられている
ことを特徴とする請求項6に記載の電流センサ。 - 前記一対の保持部材は、前記第1および第2の磁気抵抗効果素子における各積層構造の積層面と平行であり、かつ、外部に露出した基準平面を有する
ことを特徴とする請求項7に記載の電流センサ。 - 前記第1および第2の磁気抵抗効果素子のそれぞれに対し、互いに等しい値の定電流を供給する第1および第2の定電流源と、
前記定電流によって前記第1および第2の磁気抵抗効果素子のそれぞれに生ずる電圧降下の差分を検出する差分検出器と
を備えた
ことを特徴とする請求項1から請求項8のいずれか1項に記載の電流センサ。 - 前記電圧降下の差分に応じた補償電流が流れることにより、前記検出対象電流に基づいて前記第1および第2の磁気抵抗効果素子に印加される各誘導磁界とは逆方向の補償磁界を前記第1および第2の磁気抵抗効果素子の各々に付与するように構成された補償電流ラインをさらに備えた
ことを特徴とする請求項9に記載の電流センサ。 - 前記異方性磁界の方向に沿ったバイアス磁界を前記第1および第2の磁気抵抗効果素子に対して印加するバイアス磁界印加手段を備えた
ことを特徴とする請求項1から請求項10のいずれか1項に記載の電流センサ。 - 検出対象電流の供給により誘導磁界を発生する導体の近傍に配置され、前記検出対象電流を検出する電流センサであって、
一定方向に固着された磁化方向を有する固着層と、非磁性の中間層と、前記誘導磁界に応じて磁化方向が変化すると共に前記固着層の磁化方向と異なる方向の異方性磁界を発現する自由層とを含む積層構造をそれぞれ有する第1から第4の磁気抵抗効果素子を備え、
前記第1から第4の磁気抵抗効果素子における各積層構造が同一階層に設けられ、
前記第1の磁気抵抗効果素子の抵抗値と前記第3の磁気抵抗効果素子の抵抗値とが、前記誘導磁界に応じて互いに同方向に変化し、
前記第2および第4の磁気抵抗効果素子の抵抗値が、前記誘導磁界に応じて前記第1および第3の磁気抵抗効果素子の抵抗値と逆方向に変化する
ことを特徴とする電流センサ。 - 前記第1から第4の磁気抵抗効果素子は、前記第1から第4の磁気抵抗効果素子における各積層構造の積層面と平行な中心軸から互いに等しい距離に位置する
ことを特徴とする請求項12に記載の電流センサ。 - 前記第1および第3の磁気抵抗効果素子の各積層構造は、互いに等価な関係にあり、
前記第2および第4の磁気抵抗効果素子の各積層構造は、互いに等価な関係にあり、
前記第1および第3の磁気抵抗効果素子の各積層構造と、前記第2および第4の磁気抵抗効果素子の各積層構造とは、それらの積層面と平行な中心軸を回転中心として互いに回転対称な関係にある
ことを特徴とする請求項12または請求項13に記載の電流センサ。 - 前記中心軸は、前記第1から第4の磁気抵抗効果素子の全てにおける自由層の異方性磁界の方向と一致している
ことを特徴とする請求項14に記載の電流センサ。 - 前記第1から第4の磁気抵抗効果素子における各自由層が全て同一階層に位置する
ことを特徴とする請求項12から請求項15のいずれか1項に記載の電流センサ。 - 前記第1から第4の磁気抵抗効果素子を保持する保持部材をさらに備え、
前記保持部材は、前記第1から第4の磁気抵抗効果素子における各積層構造の積層面と平行であり、かつ、外部に露出した基準平面を有する
ことを特徴とする請求項12から請求項16のいずれか1項に記載の電流センサ。 - 前記第1および第3の磁気抵抗効果素子は第1の素子基板に形成され、前記第2および第4の磁気抵抗効果素子は前記第1の素子基板とは異なる第2の素子基板に形成されている
ことを特徴とする請求項12から請求項17のいずれか1項に記載の電流センサ。 - 前記第1の素子基板は、対向配置された一対の保持部材における一対の対向面のうちの一方に設けられ、
前記第2の素子基板は、前記一対の対向面のうちの他方に設けられている
ことを特徴とする請求項18に記載の電流センサ。 - 前記一対の保持部材は、前記第1から第4の磁気抵抗効果素子における各積層構造の積層面と平行であり、かつ、外部に露出した基準平面を有する
ことを特徴とする請求項19に記載の電流センサ。 - 前記第1および第2の磁気抵抗効果素子の一端同士が第1の接続点において接続され、前記第3および第4の磁気抵抗効果素子の一端同士が第2の接続点において接続され、前記第1の磁気抵抗効果素子の他端と前記第3の磁気抵抗効果素子の他端とが第3の接続点において接続され、前記第2の磁気抵抗効果素子の他端と前記第4の磁気抵抗効果素子の他端とが第4の接続点において接続されてなるブリッジ回路と、
前記第1の接続点と前記第2の接続点との間に電圧が印加されたときに生ずる前記第3の接続点と前記第4の接続点との間の電位差に応じた補償電流が流れることにより、前記検出対象電流に基づいて前記第1から第4の磁気抵抗効果素子に印加される各誘導磁界とは逆方向の補償磁界を前記第1から第4の磁気抵抗効果素子の各々に付与するように構成された補償電流ラインと
をさらに備えたことを特徴とする請求項12から請求項20のいずれか1項に記載の電流センサ。 - 前記異方性磁界の方向に沿ったバイアス磁界を前記第1から第4の磁気抵抗効果素子に対して印加するバイアス磁界印加手段を備えた
ことを特徴とする請求項12から請求項21のいずれか1項に記載の電流センサ。 - 前記バイアス磁界印加手段は、コイルからなる
ことを特徴とする請求項11または請求項22に記載の電流センサ。 - 前記固着層の磁化方向は、前記固着層および自由層の間に生ずる交換結合磁界と前記自由層の異方性磁界との合成磁界の方向と直交している
ことを特徴とする請求項1から請求項23のいずれか1項に記載の電流センサ。 - 検出対象電流の供給により誘導磁界を発生する導体の近傍に配置され、前記検出対象電流を検出する電流センサを製造する方法であって、
一の基体上に、一定方向の異方性磁界を発現すると共に前記誘導磁界に応じて磁化方向が変化する第1の強磁性層と、非磁性の中間層と、前記第1の強磁性層よりも大きな保磁力を有する第2の強磁性層とを順に積層してなる積層構造をそれぞれ含む複数の磁気抵抗効果素子を一括して形成する工程と、
前記複数の磁気抵抗効果素子の全てについて、前記異方性磁界の方向と異なる方向となるように前記第2の強磁性層の磁化方向を一括して設定する工程と、
前記基体を前記磁気抵抗効果素子ごとに複数に分割することで、それぞれ一の前記磁気抵抗効果素子が設けられた第1および第2の素子基板を取り出す工程と、
前記第1および第2の素子基板を、前記磁気抵抗効果素子における各積層構造が同一階層に位置し、かつ、前記誘導磁界に応じて前記第1の素子基板における磁気抵抗効果素子の抵抗値と前記第2の素子基板における磁気抵抗効果素子の抵抗値とが互いに逆方向の変化を示すように配置する工程と
を含むことを特徴とする電流センサの製造方法。 - 前記第1および第2の素子基板を、前記第1の素子基板における積層構造と前記第2の素子基板における積層構造とがそれらの積層面と平行な中心軸を回転中心として互いに回転対称な関係となるように配置する
ことを特徴とする請求項25に記載の電流センサの製造方法。 - 検出対象電流の供給により誘導磁界を発生する導体の近傍に配置され、前記検出対象電流を検出する電流センサを製造する方法であって、
一の基体上に、一定方向の異方性磁界を発現すると共に前記誘導磁界に応じて磁化方向が変化する第1の強磁性層と、非磁性の中間層と、前記第1の強磁性層よりも大きな保磁力を有する第2の強磁性層とを順に積層してなる積層構造をそれぞれ含む複数の磁気抵抗効果素子を一括して形成する工程と、
前記複数の磁気抵抗効果素子の全てについて、前記異方性磁界の方向と異なる方向となるように前記第2の強磁性層の磁化方向を一括して設定する工程と、
前記基体を複数に分割することで、2つの前記磁気抵抗効果素子を各々含む前記第1および第2の素子モジュールを形成する工程と、
前記第1および第2の素子モジュールを、前記第1から第4の磁気抵抗効果素子における各積層構造が同一階層に位置し、かつ、前記誘導磁界に応じて前記第1の素子モジュールにおける磁気抵抗効果素子の抵抗値と前記第2の素子モジュールにおける磁気抵抗効果素子の抵抗値とが互いに逆方向の変化を示すように配置する工程と
を含むことを特徴とする電流センサの製造方法。 - 前記第1および第2の素子モジュールを、前記第1の素子モジュールにおける積層構造と前記第2の素子モジュールにおける積層構造とがそれらの積層面と平行な中心軸を回転中心として互いに回転対称な関係となるように配置する
ことを特徴とする請求項27に記載の電流センサの製造方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007166576A JP4877095B2 (ja) | 2007-06-25 | 2007-06-25 | 電流センサおよびその製造方法 |
| US12/213,352 US7646196B2 (en) | 2007-06-25 | 2008-06-18 | Current sensor and method of manufacturing current sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007166576A JP4877095B2 (ja) | 2007-06-25 | 2007-06-25 | 電流センサおよびその製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009002911A true JP2009002911A (ja) | 2009-01-08 |
| JP2009002911A5 JP2009002911A5 (ja) | 2010-03-11 |
| JP4877095B2 JP4877095B2 (ja) | 2012-02-15 |
Family
ID=40136230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007166576A Active JP4877095B2 (ja) | 2007-06-25 | 2007-06-25 | 電流センサおよびその製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7646196B2 (ja) |
| JP (1) | JP4877095B2 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011196798A (ja) * | 2010-03-18 | 2011-10-06 | Tdk Corp | 電流センサ |
| KR20120040221A (ko) * | 2009-07-27 | 2012-04-26 | 후지 덴키 가부시키가이샤 | 비접촉 전류 센서 |
| JPWO2013129276A1 (ja) * | 2012-03-02 | 2015-07-30 | Tdk株式会社 | 磁気センサ素子 |
| CN105378500A (zh) * | 2013-07-19 | 2016-03-02 | 阿莱戈微系统有限责任公司 | 用于产生变化的磁场的磁传感器的方法和装置 |
| US9302488B2 (en) | 2009-06-22 | 2016-04-05 | Brother Kogyo Kabushiki Kaisha | Liquid ejecting apparatus |
| JP2017216722A (ja) * | 2017-07-24 | 2017-12-07 | Tdk株式会社 | 整流器および送受信装置 |
| US10012518B2 (en) | 2016-06-08 | 2018-07-03 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a proximity of an object |
| JP2019148475A (ja) * | 2018-02-27 | 2019-09-05 | Tdk株式会社 | 磁気センサ |
| US10495699B2 (en) | 2013-07-19 | 2019-12-03 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having an integrated coil or magnet to detect a non-ferromagnetic target |
| US10753769B2 (en) | 2014-10-31 | 2020-08-25 | Allegro Microsystems, Llc | Magnetic field sensor providing a movement detector |
| US10823586B2 (en) | 2018-12-26 | 2020-11-03 | Allegro Microsystems, Llc | Magnetic field sensor having unequally spaced magnetic field sensing elements |
| US10837943B2 (en) | 2017-05-26 | 2020-11-17 | Allegro Microsystems, Llc | Magnetic field sensor with error calculation |
| US10996289B2 (en) | 2017-05-26 | 2021-05-04 | Allegro Microsystems, Llc | Coil actuated position sensor with reflected magnetic field |
| US11237020B2 (en) | 2019-11-14 | 2022-02-01 | Allegro Microsystems, Llc | Magnetic field sensor having two rows of magnetic field sensing elements for measuring an angle of rotation of a magnet |
| US11262422B2 (en) | 2020-05-08 | 2022-03-01 | Allegro Microsystems, Llc | Stray-field-immune coil-activated position sensor |
| US11280637B2 (en) | 2019-11-14 | 2022-03-22 | Allegro Microsystems, Llc | High performance magnetic angle sensor |
| US11428755B2 (en) | 2017-05-26 | 2022-08-30 | Allegro Microsystems, Llc | Coil actuated sensor with sensitivity detection |
| US11493361B2 (en) | 2021-02-26 | 2022-11-08 | Allegro Microsystems, Llc | Stray field immune coil-activated sensor |
| US11578997B1 (en) | 2021-08-24 | 2023-02-14 | Allegro Microsystems, Llc | Angle sensor using eddy currents |
| US11680996B2 (en) | 2012-05-10 | 2023-06-20 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having integrated coil |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4361077B2 (ja) * | 2006-10-31 | 2009-11-11 | Tdk株式会社 | 磁気センサおよびその製造方法 |
| FR2941534B1 (fr) * | 2009-01-26 | 2011-12-23 | Commissariat Energie Atomique | Capteur de champ magnetique a jauge de contrainte suspendue |
| EP2442118B1 (en) * | 2009-06-12 | 2021-11-10 | Alps Alpine Co., Ltd. | Magnetic balance current sensor |
| WO2010143666A1 (ja) * | 2009-06-12 | 2010-12-16 | アルプス・グリーンデバイス株式会社 | 磁気平衡式電流センサ |
| WO2011081197A1 (ja) * | 2009-12-28 | 2011-07-07 | Tdk株式会社 | 磁界検出装置及び電流センサ |
| US8975889B2 (en) * | 2011-01-24 | 2015-03-10 | Infineon Technologies Ag | Current difference sensors, systems and methods |
| FR2979790B1 (fr) | 2011-09-07 | 2013-10-11 | Commissariat Energie Atomique | Capteur de courant |
| US9372242B2 (en) * | 2012-05-11 | 2016-06-21 | Memsic, Inc. | Magnetometer with angled set/reset coil |
| US9529060B2 (en) | 2014-01-09 | 2016-12-27 | Allegro Microsystems, Llc | Magnetoresistance element with improved response to magnetic fields |
| JP6763887B2 (ja) | 2015-06-05 | 2020-09-30 | アレグロ・マイクロシステムズ・エルエルシー | 磁界に対する応答が改善されたスピンバルブ磁気抵抗効果素子 |
| KR101891414B1 (ko) * | 2016-12-23 | 2018-08-23 | 전자부품연구원 | 센서의 외란 및 옵셋을 동시 보정할 수 있는 측정 방법 및 장치 |
| US10620279B2 (en) | 2017-05-19 | 2020-04-14 | Allegro Microsystems, Llc | Magnetoresistance element with increased operational range |
| US11022661B2 (en) | 2017-05-19 | 2021-06-01 | Allegro Microsystems, Llc | Magnetoresistance element with increased operational range |
| JP6597820B2 (ja) * | 2018-03-12 | 2019-10-30 | Tdk株式会社 | 磁気センサおよび位置検出装置 |
| US11719771B1 (en) | 2022-06-02 | 2023-08-08 | Allegro Microsystems, Llc | Magnetoresistive sensor having seed layer hysteresis suppression |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06294854A (ja) * | 1993-01-13 | 1994-10-21 | Lust Electron Syst Gmbh | センサチップ |
| JPH08226960A (ja) * | 1994-11-04 | 1996-09-03 | Internatl Business Mach Corp <Ibm> | 磁界センサー及びその製造方法 |
| JP2003066127A (ja) * | 2001-08-28 | 2003-03-05 | Alps Electric Co Ltd | 磁気センサの組立方法 |
| JP2005236134A (ja) * | 2004-02-20 | 2005-09-02 | Tdk Corp | 磁気検出素子およびその形成方法ならびに磁気センサ、電流計 |
| JP2006105693A (ja) * | 2004-10-01 | 2006-04-20 | Tdk Corp | 電流センサ |
| JP2007101252A (ja) * | 2005-09-30 | 2007-04-19 | Tdk Corp | 磁気センサおよびその製造方法ならびに電流センサ |
| JP2008111801A (ja) * | 2006-10-31 | 2008-05-15 | Tdk Corp | 磁気センサおよびその製造方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH670004A5 (ja) | 1986-02-10 | 1989-04-28 | Landis & Gyr Ag | |
| US6064552A (en) * | 1997-03-18 | 2000-05-16 | Kabushiki Kaisha Toshiba | Magnetoresistive head having magnetic yoke and giant magnetoresistive element such that a first electrode is formed on the giant magnetoresistive element which in turn is formed on the magnetic yoke which acts as a second electrode |
-
2007
- 2007-06-25 JP JP2007166576A patent/JP4877095B2/ja active Active
-
2008
- 2008-06-18 US US12/213,352 patent/US7646196B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06294854A (ja) * | 1993-01-13 | 1994-10-21 | Lust Electron Syst Gmbh | センサチップ |
| JPH08226960A (ja) * | 1994-11-04 | 1996-09-03 | Internatl Business Mach Corp <Ibm> | 磁界センサー及びその製造方法 |
| JP2003066127A (ja) * | 2001-08-28 | 2003-03-05 | Alps Electric Co Ltd | 磁気センサの組立方法 |
| JP2005236134A (ja) * | 2004-02-20 | 2005-09-02 | Tdk Corp | 磁気検出素子およびその形成方法ならびに磁気センサ、電流計 |
| JP2006105693A (ja) * | 2004-10-01 | 2006-04-20 | Tdk Corp | 電流センサ |
| JP2007101252A (ja) * | 2005-09-30 | 2007-04-19 | Tdk Corp | 磁気センサおよびその製造方法ならびに電流センサ |
| JP2008111801A (ja) * | 2006-10-31 | 2008-05-15 | Tdk Corp | 磁気センサおよびその製造方法 |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9302488B2 (en) | 2009-06-22 | 2016-04-05 | Brother Kogyo Kabushiki Kaisha | Liquid ejecting apparatus |
| US9939466B2 (en) | 2009-07-27 | 2018-04-10 | Iii Holdings 3, Llc | Non-contact current sensor |
| KR20120040221A (ko) * | 2009-07-27 | 2012-04-26 | 후지 덴키 가부시키가이샤 | 비접촉 전류 센서 |
| KR101594383B1 (ko) | 2009-07-27 | 2016-02-16 | 아이아이아이 홀딩스 3, 엘엘씨 | 비접촉 전류 센서 |
| US8593134B2 (en) | 2010-03-18 | 2013-11-26 | Tdk Corporation | Current sensor |
| JP2011196798A (ja) * | 2010-03-18 | 2011-10-06 | Tdk Corp | 電流センサ |
| JPWO2013129276A1 (ja) * | 2012-03-02 | 2015-07-30 | Tdk株式会社 | 磁気センサ素子 |
| US11680996B2 (en) | 2012-05-10 | 2023-06-20 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having integrated coil |
| US10145908B2 (en) | 2013-07-19 | 2018-12-04 | Allegro Microsystems, Llc | Method and apparatus for magnetic sensor producing a changing magnetic field |
| US12061246B2 (en) | 2013-07-19 | 2024-08-13 | Allegro Microsystems, Llc | Method and apparatus for magnetic sensor producing a changing magnetic field |
| US10495699B2 (en) | 2013-07-19 | 2019-12-03 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having an integrated coil or magnet to detect a non-ferromagnetic target |
| US10670672B2 (en) | 2013-07-19 | 2020-06-02 | Allegro Microsystems, Llc | Method and apparatus for magnetic sensor producing a changing magnetic field |
| CN105378500A (zh) * | 2013-07-19 | 2016-03-02 | 阿莱戈微系统有限责任公司 | 用于产生变化的磁场的磁传感器的方法和装置 |
| US11313924B2 (en) | 2013-07-19 | 2022-04-26 | Allegro Microsystems, Llc | Method and apparatus for magnetic sensor producing a changing magnetic field |
| US11307054B2 (en) | 2014-10-31 | 2022-04-19 | Allegro Microsystems, Llc | Magnetic field sensor providing a movement detector |
| US10753769B2 (en) | 2014-10-31 | 2020-08-25 | Allegro Microsystems, Llc | Magnetic field sensor providing a movement detector |
| US10012518B2 (en) | 2016-06-08 | 2018-07-03 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a proximity of an object |
| US11768256B2 (en) | 2017-05-26 | 2023-09-26 | Allegro Microsystems, Llc | Coil actuated sensor with sensitivity detection |
| US10837943B2 (en) | 2017-05-26 | 2020-11-17 | Allegro Microsystems, Llc | Magnetic field sensor with error calculation |
| US10996289B2 (en) | 2017-05-26 | 2021-05-04 | Allegro Microsystems, Llc | Coil actuated position sensor with reflected magnetic field |
| US11428755B2 (en) | 2017-05-26 | 2022-08-30 | Allegro Microsystems, Llc | Coil actuated sensor with sensitivity detection |
| JP2017216722A (ja) * | 2017-07-24 | 2017-12-07 | Tdk株式会社 | 整流器および送受信装置 |
| WO2019167598A1 (ja) * | 2018-02-27 | 2019-09-06 | Tdk株式会社 | 磁気センサ |
| JP2019148475A (ja) * | 2018-02-27 | 2019-09-05 | Tdk株式会社 | 磁気センサ |
| US10823586B2 (en) | 2018-12-26 | 2020-11-03 | Allegro Microsystems, Llc | Magnetic field sensor having unequally spaced magnetic field sensing elements |
| US11280637B2 (en) | 2019-11-14 | 2022-03-22 | Allegro Microsystems, Llc | High performance magnetic angle sensor |
| US11237020B2 (en) | 2019-11-14 | 2022-02-01 | Allegro Microsystems, Llc | Magnetic field sensor having two rows of magnetic field sensing elements for measuring an angle of rotation of a magnet |
| US11262422B2 (en) | 2020-05-08 | 2022-03-01 | Allegro Microsystems, Llc | Stray-field-immune coil-activated position sensor |
| US11493361B2 (en) | 2021-02-26 | 2022-11-08 | Allegro Microsystems, Llc | Stray field immune coil-activated sensor |
| US11578997B1 (en) | 2021-08-24 | 2023-02-14 | Allegro Microsystems, Llc | Angle sensor using eddy currents |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4877095B2 (ja) | 2012-02-15 |
| US7646196B2 (en) | 2010-01-12 |
| US20080316655A1 (en) | 2008-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4877095B2 (ja) | 電流センサおよびその製造方法 | |
| JP4361077B2 (ja) | 磁気センサおよびその製造方法 | |
| JP4930627B2 (ja) | 磁気センサ | |
| JP4105142B2 (ja) | 電流センサ | |
| JP6130775B2 (ja) | 電流センサ | |
| JP4105147B2 (ja) | 電流センサ | |
| JP5250108B2 (ja) | 磁気平衡式電流センサ | |
| JP5012939B2 (ja) | 電流センサ | |
| US7737678B2 (en) | Magnetic sensor and current sensor | |
| JP4360998B2 (ja) | 電流センサ | |
| JP5888402B2 (ja) | 磁気センサ素子 | |
| JP2011064653A (ja) | 磁気センサおよびその製造方法 | |
| JP7324331B2 (ja) | 磁気検出装置 | |
| JP2011047929A (ja) | 磁気センサ | |
| WO2011111536A1 (ja) | 磁気平衡式電流センサ | |
| WO2011111537A1 (ja) | 電流センサ | |
| JP5447616B2 (ja) | 磁気センサの製造方法 | |
| JP7232647B2 (ja) | 磁気検出装置 | |
| JP2011027633A (ja) | 磁気センサおよびその製造方法 | |
| JP2007298329A (ja) | 角度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110707 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111101 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4877095 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |