JP2008122228A - 位置合わせシステム及び位置合わせ方法 - Google Patents
位置合わせシステム及び位置合わせ方法 Download PDFInfo
- Publication number
- JP2008122228A JP2008122228A JP2006306406A JP2006306406A JP2008122228A JP 2008122228 A JP2008122228 A JP 2008122228A JP 2006306406 A JP2006306406 A JP 2006306406A JP 2006306406 A JP2006306406 A JP 2006306406A JP 2008122228 A JP2008122228 A JP 2008122228A
- Authority
- JP
- Japan
- Prior art keywords
- adjustment
- dimensional
- measuring
- measurement
- deviation amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/03—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring coordinates of points
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【課題】広いスペースを必要とせず、容易に且つ高精度に位置合わせする。
【解決手段】立体的な測定対象物である立体測定物と、立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する測定手段と、測定手段と立体測定物との位置合わせの基準となる基準情報を予め記憶する記憶手段と、3次元データと基準情報とに基づいて、測定手段の座標系における当該測定手段と立体測定物との間の位置ずれ量及び角度ずれ量を算出するズレ量算出手段と、位置ずれ量及び角度ずれ量を位置合わせにおける調整動作用の調整パラメータに変換する変換手段と、調整パラメータに基づいて、立体測定物の位置及び角度を調整する調整手段とを備える。
【選択図】図1
【解決手段】立体的な測定対象物である立体測定物と、立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する測定手段と、測定手段と立体測定物との位置合わせの基準となる基準情報を予め記憶する記憶手段と、3次元データと基準情報とに基づいて、測定手段の座標系における当該測定手段と立体測定物との間の位置ずれ量及び角度ずれ量を算出するズレ量算出手段と、位置ずれ量及び角度ずれ量を位置合わせにおける調整動作用の調整パラメータに変換する変換手段と、調整パラメータに基づいて、立体測定物の位置及び角度を調整する調整手段とを備える。
【選択図】図1
Description
本発明は、相対する測定装置と測定対象物との2者間の位置合わせを行う位置合わせシステム及び位置合わせ方法に関する。
従来、非接触3次元測定装置(以下単に「測定装置」とも表記する)によって測定対象物の3次元計測すなわち3次元形状を計測する方法は、CG(Computer Graphics)、デザイン、或いは自動車等の工業向けなど様々な用途に活用されている。この3次元計測の測定原理としては、レーザスリット光等を用いた光切断法、パターン光を用いたパターン投影法、同一の測定対象物を異なる複数の視線方向からカメラによって撮影した画像に基づくステレオ法、或いはモアレを用いたモアレ法などを用いて得られた測定データから、ポリゴン等からなる3次元データを得るというものが知られている。
非接触3次元測定装置では、測定確度(寸法の確からしさの意味)の確保が重要であり、工場等で測定装置を校正し、確度検査を行った上で出荷する。しかしながら、ユーザの測定環境においては、当該校正や検査を行っていてもなお、以下の要因等により測定装置の確度誤差が発生し得る。
・温度や湿度の環境変化に起因するメカ部材の膨張や収縮、或いは電気特性の変化
・測定装置の姿勢変化に起因するメカ部材や光学系の歪み
・レンズ交換(レンズが着脱可能な測定装置の場合)すなわちレンズを着脱することによる光学系のずれ
・温度や湿度の環境変化に起因するメカ部材の膨張や収縮、或いは電気特性の変化
・測定装置の姿勢変化に起因するメカ部材や光学系の歪み
・レンズ交換(レンズが着脱可能な測定装置の場合)すなわちレンズを着脱することによる光学系のずれ
そのため、ユーザの測定環境においてこれらによる確度誤差を補正するための校正を行う必要がある。この校正はユーザ校正と呼ばれている。一般的に、ユーザ校正を行うには校正チャートの測定を行う。校正チャートとは、寸法が既知の校正用測定対象物のことである。ユーザ校正では、実際に測定して得られた測定対象物の寸法とこの校正用測定対象物の既知の寸法との誤差が最小となるように各種校正パラメータを最適化する。
上記ユーザ校正における測定に際しては、測定装置と校正チャート(測定対象物)との位置関係を決める(位置決めを行う)必要がある。この測定装置と校正チャートとの位置関係は1つ又は複数のパターンに決められている。例えば、測定装置に校正チャートを正対させて近側位置、中央位置及び遠側位置とする場合、並びに測定装置に対して斜め上向き、斜め下向き、斜め右向き及び斜め左向きとする場合の合計7パターンの位置関係である。図15は、近側、中央及び遠側位置、並びに斜め上向き及び斜め下向きの5パターンの場合の位置関係を示している。
特開2000−97636号公報
上記測定装置と校正チャートとの位置決めに関し、所定の支持部材例えばフレーム(校正チャートフレーム)に校正チャートと測定装置とを設置(固定)することで位置決めする方法、つまり冶具を用いた位置決め方法が知られている。しかしながらこの方法では、以下に示すような問題がある。
・校正チャートの設置場所に凹凸があると、校正チャートフレームが歪み、結果的に設置位置がずれて校正精度が悪くなることがある。
・測定装置をスタンド等に取り付けている場合、測定装置を該スタンドから一旦取り外してフレームに設置するのに手間がかかるとともに、落下等による破損の恐れもある。測定装置が重い場合には、当該測定装置の取り外しや設置に際して作業者に一層の負担をかけることになる。
・或る特定の姿勢(例えば正対姿勢)のみでの校正となるため、実際に測定するときと同じ姿勢で校正できない。すなわち姿勢が違うことによる装置各部材の撓みや歪みによる測定誤差(姿勢差;後述の実施形態における測定装置の発光部及び受光部間の基線長の変化による三角測量の誤差)が測定値に現れてしまう。
・フレームが長い場合には広い保管スペースが必要となる(図16参照)。
・測定装置をスタンド等に取り付けている場合、測定装置を該スタンドから一旦取り外してフレームに設置するのに手間がかかるとともに、落下等による破損の恐れもある。測定装置が重い場合には、当該測定装置の取り外しや設置に際して作業者に一層の負担をかけることになる。
・或る特定の姿勢(例えば正対姿勢)のみでの校正となるため、実際に測定するときと同じ姿勢で校正できない。すなわち姿勢が違うことによる装置各部材の撓みや歪みによる測定誤差(姿勢差;後述の実施形態における測定装置の発光部及び受光部間の基線長の変化による三角測量の誤差)が測定値に現れてしまう。
・フレームが長い場合には広い保管スペースが必要となる(図16参照)。
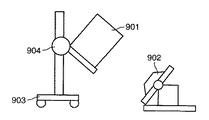
また、上記位置決めに関し、特許文献1には、図17に示すように、測定装置901により測定対象物902の2次元画像(モニタ画像)を取得し、ユーザがこの2次元画像上における或るポイントつまり基準点を指定すると、この基準点が測定装置の座標系の原点(中心点)に来るように、位置調整機構903及び角度調整機構904によって測定対象物902に対する測定装置901の位置及び角度が自動制御される技術が開示されている。しかしながらこの技術では、以下に示すような問題がある。
・ユーザによる位置合わせ基準点の指定(この位置に合わせたいという指示)が作業手順に含まれており、位置合わせを自動的に行うことができない。
・形状が既知の立体測定物(測定対象物)を想定していない。
・複数の位置関係(斜め方向など)で校正するとき、校正チャートの周囲で測定装置を動かすつまり測定装置の場所を移動させたり姿勢や向きを変えなくてはならず、当該校正用に広いスペース(設置スペース或いは移動スペース)が必要になってしまう。
・複数の位置関係で校正するとき、測定装置を上述のように動かすため、実際に測定するときと同じ姿勢で校正できない(姿勢差が生じる)場合がある。
・2次元画像に対してポイントを指示する方法では、大まかな位置合わせは可能であっても、位置や角度を高精度に合わせることは難しい。
・形状が既知の立体測定物(測定対象物)を想定していない。
・複数の位置関係(斜め方向など)で校正するとき、校正チャートの周囲で測定装置を動かすつまり測定装置の場所を移動させたり姿勢や向きを変えなくてはならず、当該校正用に広いスペース(設置スペース或いは移動スペース)が必要になってしまう。
・複数の位置関係で校正するとき、測定装置を上述のように動かすため、実際に測定するときと同じ姿勢で校正できない(姿勢差が生じる)場合がある。
・2次元画像に対してポイントを指示する方法では、大まかな位置合わせは可能であっても、位置や角度を高精度に合わせることは難しい。
本発明は、上記事情に鑑みてなされたもので、広いスペースを必要とせず、また、ユーザが基準となる位置を指示する動作等を必要とせず容易に位置合わせすることが可能であるとともに、姿勢差の発生防止等により高精度に位置合わせすることが可能な位置合わせシステム及び位置合わせ方法を提供することを目的とする。
本発明に係る位置合わせシステムは、立体的な測定対象物である立体測定物と、前記立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する測定手段と、前記測定手段と前記立体測定物との位置合わせの基準となる基準情報を予め記憶する記憶手段と、前記3次元データと前記基準情報とに基づいて、前記測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量を算出するズレ量算出手段と、前記位置ずれ量及び角度ずれ量を前記位置合わせにおける調整動作用の調整パラメータに変換する変換手段と、前記調整パラメータに基づいて、前記立体測定物の位置及び角度を調整する調整手段とを備えることを特徴とする。
上記構成によれば、測定手段によって、立体的な測定対象物である立体測定物が非接触に3次元測定されて該立体測定物の3次元データが取得される。また、記憶手段によって、測定手段と立体測定物との位置合わせの基準となる基準情報が予め記憶される。また、ズレ量算出手段によって、3次元データと基準情報とに基づいて測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が算出される。そして、変換手段によって、位置ずれ量及び角度ずれ量が位置合わせにおける調整動作用の調整パラメータに変換され、調整手段によって、調整パラメータに基づいて立体測定物の位置及び角度が調整される。
また、上記構成において、前記立体測定物の姿勢を検出する姿勢検出手段をさらに備え、前記変換手段は、前記姿勢検出手段による姿勢検出情報を用いて前記測定手段の座標系と前記調整手段の座標系との関係を示す関係式を算出し、該関係式に基づく座標変換を行うことによって、前記測定手段の座標系における位置ずれ量及び角度ずれ量を、前記調整手段の座標系における前記調整パラメータに変換するようにしてもよい。(請求項2)
これによれば、姿勢検出手段によって、立体測定物の姿勢が検出される。そして、変換手段によって、姿勢検出手段による姿勢検出情報を用いて測定手段の座標系と調整手段の座標系との関係を示す関係式が算出され、該関係式に基づく座標変換が行われることによって、測定手段の座標系における位置ずれ量及び角度ずれ量が、調整手段の座標系における調整パラメータに変換される。
また、上記構成において、前記立体測定物は、前記測定手段の校正を行うための、形状が既知である基準立体物であって、前記調整手段は、前記校正を行う前段階としての前記位置合わせを行うべく前記基準立体物の位置及び角度を調整するようにしてもよい。(請求項3)
これによれば、立体測定物が、測定手段の校正を行うための、形状が既知である基準立体物とされる。そして、調整手段によって、校正を行う前段階としての位置合わせを行うべく基準立体物の位置及び角度が調整される。
また、上記構成において、前記調整手段は、前記調整を行うべく前記調整パラメータに基づいて自動的に駆動する自動調整機構を備えるようにしてもよい。(請求項4)
これによれば、調整手段が備える自動調整機構によって、調整を行うべく調整パラメータに基づいて自動的に駆動が行われる。
また、上記構成において、前記調整パラメータに関する情報をユーザに報知する調整情報報知手段をさらに備え、前記調整手段は、前記調整を行うべく前記ユーザの手動操作によって駆動する手動調整機構を備えるようにしてもよい。(請求項5)
これによれば、調整情報報知手段によって、調整パラメータに関する情報がユーザに報知される。そして、調整手段が備える手動調整機構によって、調整を行うべくユーザの手動操作による駆動が行われる。
また、上記構成において、前記基準立体物は、角錐台状のものであるようにしてもよい。(請求項6)
これによれば、基準立体物が角錐台状のものとされる。
また、上記構成において、前記基準立体物は、所定の位置関係で配設された複数の球体からなるものであるようにしてもよい。(請求項7)
これによれば、基準立体物が所定の位置関係で配設された複数の球体からなるものとされる。
また、上記構成において、前記測定手段、ズレ量算出手段、変換手段、調整手段及び姿勢検出手段の少なくとも1つの手段について動作の異常を検出する異常検出手段と、
前記異常検出手段により異常が検出された場合に、該異常を示す情報をユーザに報知する異常報知手段とをさらに備えるようにしてもよい。(請求項8)
前記異常検出手段により異常が検出された場合に、該異常を示す情報をユーザに報知する異常報知手段とをさらに備えるようにしてもよい。(請求項8)
これによれば、異常検出手段によって、測定手段、ズレ量算出手段、変換手段、調整手段及び姿勢検出手段の少なくとも1つの手段について動作の異常が検出される。そして、異常報知手段によって、異常検出手段により異常が検出された場合に、該異常を示す情報がユーザに報知される。
また、上記構成において、前記位置合わせシステムは、前記測定手段である測定装置と、前記立体測定物と、該立体測定物の位置及び角度を変化させることが可能に支持する前記調整手段とからなる被測定装置と、前記記憶手段、ズレ量算出手段及び変換手段を内蔵するとともに、前記測定装置及び被測定装置それぞれと通信可能に接続された情報処理装置とからなるものであるようにしてもよい。(請求項9)
これによれば、位置合わせシステムが、測定手段である測定装置と、立体測定物と、該立体測定物の位置及び角度を変化させることが可能に支持する調整手段とからなる被測定装置と、記憶手段、ズレ量算出手段及び変換手段を内蔵するとともに、測定装置及び被測定装置それぞれと通信可能に接続された情報処理装置とからなるものとされる。
また、本発明に係る位置合わせ方法は、立体的な測定対象物である立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する第1の工程と、前記立体測定物を測定する測定手段と該立体測定物との位置合わせの基準となる基準情報を予め取得する第2の工程と、前記3次元データと前記基準情報とに基づいて、前記測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量を算出する第3の工程と、前記位置ずれ量及び角度ずれ量を前記位置合わせにおける調整動作用の調整パラメータに変換する第4の工程と、前記調整パラメータに基づいて、前記立体測定物の位置及び角度を調整する第5の工程とを有することを特徴とする。(請求項10)
これによれば、第1の工程において、立体的な測定対象物である立体測定物が非接触に3次元測定されて該立体測定物の3次元データが取得される。第2の工程において、立体測定物を測定する測定手段と該立体測定物との位置合わせの基準となる基準情報が予め取得される。また、第3の工程において、3次元データと基準情報とに基づいて、測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が算出される。そして、第4の工程において、位置ずれ量及び角度ずれ量が位置合わせにおける調整動作用の調整パラメータに変換され、第5の工程において、調整パラメータに基づいて、立体測定物の位置及び角度が調整される。
また、上記構成において、前記立体測定物の姿勢を検出する第6の工程をさらに有し、前記第4の工程は、前記第6の工程において検出された姿勢検出情報を用いて前記測定手段の座標系と、前記調整を行う調整手段の座標系との関係を示す関係式を算出し、該関係式に基づく座標変換を行うことによって、前記測定手段の座標系における位置ずれ量及び角度ずれ量を、前記調整手段の座標系における前記調整パラメータに変換する工程であるようにしてもよい。(請求項11)
これによれば、第6の工程において、立体測定物の姿勢が検出される。そして、第4の工程において、第6の工程において検出された姿勢検出情報を用いて測定手段の座標系と、調整を行う調整手段の座標系との関係を示す関係式が算出され、該関係式に基づく座標変換が行われることによって、測定手段の座標系における位置ずれ量及び角度ずれ量が、調整手段の座標系における調整パラメータに変換される。
請求項1に係る位置合わせシステムによれば、測定手段と立体測定物との位置合わせが、調整手段による立体測定物の位置及び角度の調整により行われるので、すなわち当該位置合わせが、測定手段を動かさずに、立体測定物を動かすことによって行われるので、広いスペース(設置スペース或いは移動スペース)を必要とすることなく位置合わせすることができる。また、3次元データと基準情報とに基づいて測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が自動的に算出されるので、ユーザが基準となる位置を指示する動作が必要がなく、容易に位置合わせすることができる。位置ずれ量及び角度ずれ量が調整手段の調整パラメータに変換されることからも、この調整パラメータを用いて、当該位置合わせのための調整作業が例えば自動駆動、手動操作いずれで行う場合にも容易に行えるようになる。また、測定手段を動かさずに(位置や向きを変えることなく)、実際に測定するのと同じ姿勢を保った状態で当該位置合わせが行われるため、姿勢差の発生を防止することができ、ひいては高精度な位置合わせが可能となる。測定手段による立体測定物の3次元測定により3次元データが取得される、すなわち調整手段による調整動作において立体測定物の3次元データが用いられることからも(2次元データを用いた位置合わせを行う場合と比べて)、高精度な位置合わせが可能となる。
請求項2に係る位置合わせシステムによれば、測定手段座標系における位置ずれ量及び角度ずれ量が、該測定手段座標系と調整手段座標系との関係に基づく座標変換によって調整手段座標系における調整パラメータに変換されるので、測定手段側で求めた位置ずれ量及び角度ずれ量を、調整手段側での位置ずれ量及び角度ずれ量として扱うことができるようになる。これにより、測定手段を動かすことなく立体測定物の方を動かして当該位置合わせする構成を実現することができ、ひいては広いスペースを必要とせず、容易且つ高精度に位置合わせすることが可能となる。
請求項3に係る位置合わせシステムによれば、位置合わせシステムを、基準立体物を用いて測定手段の校正を行う校正システムとして使用することができる。
請求項4に係る位置合わせシステムによれば、調整手段による調整動作を自動調整機構によって自動的に行うことができ、測定手段と立体測定物との位置合わせが一層容易に行えるようになる。
請求項5に係る位置合わせシステムによれば、調整手段による調整動作をユーザによる手動調整機構を用いた手動操作によって行うことができ、ひいては測定手段と立体測定物との位置合わせ動作における自由度が高くなる。
請求項6に係る位置合わせシステムによれば、角錐台状の簡易な形状の基準立体物を用いて、容易に且つ精度良く位置ずれ量及び角度ずれ量を求めて当該位置合わせを行うことができるとともに、この基準立体物を用いて、位置合わせ後の校正を容易に且つ精度良く行うことができる。
請求項7に係る位置合わせシステムによれば、所定の位置関係で配設された複数の球体からなる簡易な形状の基準立体物を用いて、容易に且つ精度良く位置ずれ量及び角度ずれ量を求めて当該位置合わせを行うことができるとともに、この基準立体物を用いて、位置合わせ後の校正を容易に且つ精度良く行うことができる。
請求項8に係る位置合わせシステムによれば、異常報知手段により異常情報が報知されることで、位置合わせシステムの動作(位置合わせの動作)に異常が発生していることをユーザが容易に知ることができる。
請求項9に係る位置合わせシステムによれば、位置合わせシステムを、測定装置、被測定装置及び情報処理装置からなるシンプルな構成のシステムとすることができる。
請求項10に係る位置合わせ方法によれば、測定手段と立体測定物との位置合わせが、立体測定物の位置及び角度の調整により行われるので、すなわち当該位置合わせが、測定手段を動かさずに、立体測定物を動かすことによって行われるので、広いスペース(設置スペース或いは移動スペース)を必要とすることなく位置合わせすることができる。また、3次元データと基準情報とに基づいて測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が自動的に算出されるので、ユーザが基準となる位置を指示する動作が必要がなく、容易に位置合わせすることができる。位置ずれ量及び角度ずれ量が調整動作用の調整パラメータに変換されることからも、この調整パラメータを用いて、当該位置合わせのための調整作業が例えば自動駆動、手動操作いずれで行う場合にも容易に行えるようになる。また、測定手段を動かさずに(位置や向きを変えることなく)、実際に測定するのと同じ姿勢を保った状態で当該位置合わせが行われるため、姿勢差の発生を防止することができ、ひいては高精度な位置合わせが可能となる。測定手段による立体測定物の3次元測定により3次元データが取得される、すなわち立体測定物の位置及び角度の調整動作において立体測定物の3次元データが用いられることからも(2次元データを用いた位置合わせを行う場合と比べて)、高精度な位置合わせが可能となる。
請求項11に係る位置合わせ方法によれば、測定手段座標系における位置ずれ量及び角度ずれ量が、該測定手段座標系と調整手段座標系との関係に基づく座標変換によって調整手段座標系における調整パラメータに変換されるので、測定手段側で求めた位置ずれ量及び角度ずれ量を、調整手段側での位置ずれ量及び角度ずれ量として扱うことができるようになる。これにより、測定手段を動かすことなく立体測定物の方を動かして当該位置合わせする構成を実現することができ、ひいては広いスペースを必要とせず、容易且つ高精度に位置合わせすることが可能となる。
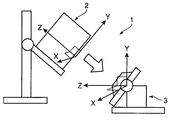
図1は、本実施形態に係る位置合わせシステムの一例である3次元測定システム1の概略構成図である。3次元測定システム1は、測定装置2、校正装置3及び情報処理装置4を備えている。測定装置2は、測定対象物を接触することなく3次元測定する所謂非接触3次元測定装置である。測定装置2は、測定装置2の前面(後述の校正チャートに対向させる面)に投光部21及び受光部22を備えており、投光部21から射出した所定の光(光線)によって測定対象物(後述の校正チャート)を照射し、この照射光による測定対象物からの反射光を受光部22により受光して信号(受光信号)に変換することにより該測定対象物の3次元的な測定情報(3次元測定データ)を取得する。測定装置2によるこの3次元測定は、所謂三角測量の原理に基づく測定である。
測定装置2は、所定の支持台例えばスタンド23を備えており、このスタンド23に固定されている。スタンド23は、測定装置2を支持するフレーム体231、及び当該測定装置2が支持されたフレーム体231を例えばスタンド本体232に対してその回動を規制することで所定の向き(図1では斜め下向き)に固定する固定具233などを備えてなる。ところで、測定装置2の座標系(測定装置座標系という)は、測定装置2側で定義したローカル座標系である。このローカル座標系をワールド座標系で見た場合、図2(a)〜(c)に示すように、測定装置2の姿勢が変化するとこれに伴い測定装置座標系の向きも変化する。ここでは測定装置座標系として、測定装置2における上記前面の面内にX−Y軸を定める(ここでは図2(a)中の手前側に向かってX軸、図2(a)中の上側に向かってY軸と定める)とともに、この前面の反対側(後方側)に向かってZ軸を定める。なお、測定装置2は情報処理装置4と通信ケーブル24によって接続されており、情報処理装置4との間のデータの送受信が可能とされている。なお、測定装置2の電源は測定装置2内に備えたものであってもよいし、所定の外部電源でもよい。
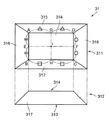
校正装置3は、測定装置2による測定対象物の測定に関する該測定装置2の校正を行うためのものである。3次元測定システム1において、校正装置3は該校正装置3の校正チャート31が測定装置2と向かい合うように配置されている。校正装置3は、校正チャート31及び位置角度調整機構32を備えている。校正チャート31は、例えば図3に示すような当該校正において用いる所定の基準となる立体物(基準立体物;本実施形態ではこれを「校正チャート」という)である。
図3における符号311で示す図は、校正チャート31における前記測定装置2の前面に対向する面の平面図であり、符号312で示す図は側面図である。校正チャート31は角錐(ここでは4角錐)の頭が切り欠かれてなる所謂角錐台の形状をしたもの、換言すれば平面視が四角形である台形状の立体(台形体という)である。詳細には、長方形の底面313と、該底面313に平行な長方形の頂面314と、該頂面314の四辺に接した台形の4つの側面315〜318とで囲まれた立体をしている。ただし、校正チャート31は同図に示す台形体に限定されず、例えば平面視が正方形の台形体であってもよい。なお、頂面314における辺AB、BC、CD及びDAそれぞれの中点E、H、F及びGを定めたときの線EFと線GGとの交点を点Iと定める(頂面314の対角線AC及びBDの交点を点Iとしてもよい)。また、校正チャート31の頂面314を、点ABCDで囲まれてなる「平面ABCD」と適宜表現する。
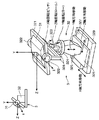
位置角度調整機構32は、校正チャート31を支持するとともに該校正チャート31の測定装置2に対する位置や角度を調整するもの(機構)である。位置角度調整機構32の詳細を説明する前に先ず、校正装置3における座標系について説明する。校正装置3の座標系(校正装置座標系という)は、謂わば固定されたワールド座標系と同等の座標系(ワールド座標系)である。ここでは、この固定されたワールド座標系として、図4中の左上に概略的に記載した校正装置3に示すように、水平方向で且つ上記頂面314側に向かってZ軸を、鉛直方向上向きにY軸を、これらY軸及びZ軸によるY−Z平面に対して垂直で且つ紙面の手前側へ向かってX軸を定める。
位置角度調整機構32は、X、Y及びZ軸方向の平行移動と、X、Y及びZ軸回りの回転移動(X軸回転;ピッチ、Y軸回転;ヨー、Z軸回転;ロール)との合計6つの自由度での校正チャート31の移動(位置・角度調整)が可能に構成されている。すなわち位置角度調整機構32は、校正チャート31を載置(位置固定)する略平板状の載置台321と、校正チャート31が載置された載置台321をX軸回転させる一対のX軸回転部322と、載置台321をZ軸回転させるZ軸回転部323と、載置台321をY軸回転させるY軸回転部324と、載置台321をY軸、X軸、Z軸方向に平行移動させるそれぞれY軸移動部325とX軸移動部326とZ軸移動部327と、載置台321を当該X、Y、Z軸回転及びY軸平行移動可能に支持する支持フレーム328と、基台329とを備えている。ただし、X軸移動部326及びZ軸移動部327は、それぞれ基台329に対して例えばスライド移動が可能なスライドレール機構を備えた構成となっており、また、Y軸移動部325は基台329に対して鉛直方向の上下移動が可能な例えばジャッキ機構を備えた構成となっている。なお、上記X、Y及びZ軸回転の各回転軸は全て校正装置座標系の原点(校正チャート31の中央(中心)部;後述する点I)を通るように設計されている。
上記各部322〜327にはモータ(例えばサーボモータ)等の駆動部(駆動源、駆動機構)が設けられており、この駆動部によって各座標軸に対する回転移動や平行移動を行うことができるようになっている。ただし、駆動部は当該回転や平行移動を可能とするのであれば任意の構成及び動作方法が採用可能である。これにより、各部322〜327は、後述する情報処理装置4から送信されてきた調整パラメータ分だけすなわち調整パラメータに対応する回転量及び平行移動量だけ自動的に駆動される。この駆動により、相対する校正チャート31と測定装置2との位置合わせ(原点合わせ)が行われる。ここで、「位置合わせ」という言葉について定義しておく。相対するつまり対向配置された2者間の“ずれ”を考える場合、この“ずれ”には、位置的(距離的)なずれ(これを「位置ずれ」という)と、角度的な(向く方向の)ずれ(これを「角度ずれ」という)との意味が含まれる。すなわち、「位置合わせ」は、これら「位置ずれ」及び「角度ずれ」が無くなるように調整して合わせることである(「位置合わせ」における“位置”と、「位置ずれ」における“位置”とは違う意味である)。
かかる位置合わせにおける実際の動作では、先ず“回転”によって角度ずれを調整する。位置角度調整機構32では、当該回転はY軸回転、Z軸回転、X軸回転の順で行われる。すなわち最初にY軸回りにθ回転(これを回転行列Yθで定義する)した後、この回転後のZ軸回りにφ回転(これを回転行列Zφで定義する)し、さらにこの回転後のX軸回りにψ回転(これを回転行列Xψで定義する)する。そして、当該回転させることによって角度ずれを調整した後、平行移動させることによって位置ずれを調整する。この平行移動における移動量を(lx,ly,lz)として、行列Lで定義する。
上記回転行列Yθ、Zφ、Xψ及び行列Lは、それぞれ以下の(1)〜(4)式で表される。

上記記回転行列Yθ、Zφ、Xψ及び行列Lによる一連の座標変換行列を「M」とすると、以下の(5)式で表すことができる。
M=Yθ・Zφ・Xψ・L ・・・(5)
M=Yθ・Zφ・Xψ・L ・・・(5)
上記座標変換行列Mによる座標変換前の座標を(xa,ya,za)、座標変換後の座標を(xb,yb,zb)とし、また、Pa=(xa,ya,za,1)、Pb=(xb,yb,zb,1)とおくと、以下の(6)式となる。
Pb=M・Pa ・・・(6)
Pb=M・Pa ・・・(6)
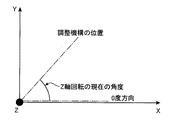
位置角度調整機構32は、校正チャート31の姿勢を検出する姿勢検出手段の役割も兼ねている。すなわち、位置角度調整機構32(X軸回転部322、Z軸回転部323及びY軸回転部324)による回転移動については、調整機構の現在の角度絶対値を読み取ることもできるようにしておけば、校正チャート31のワールド座標系における姿勢も検出することができる。例えば、上記Z軸回転の場合であれば、図5に示すようにXY平面の例えばX軸方向を、当該Z軸回転における回転角度の絶対的な基準である例えば0(ゼロ)度であるとする。そしてこの基準角度位置からどれくらいの角度だけ回転しているかを示す回転量(上記角度絶対値)を検出することで、現在、校正チャート31がどれくらい傾いているかといった姿勢を検出することが可能である。
位置角度調整機構32は、当該回転量を検出する検出部つまり姿勢検出センサを各回転部322〜324に備えており、各回転部322〜324の駆動に応じてこの姿勢検出センサによって、例えば、上記基準角度位置(0度)からどれくらいの量(絶対量)だけ回転しているかを示す目盛り値(ゲージ値)の情報を自動的に検出する(読み取る)構成であってもよい。このようにして、X軸、Y軸及びZ回転それぞれの角度絶対値(ψ0,φ0,θ0)が求まる。この姿勢検出センサによって検出された情報(これを姿勢検出情報という)は、情報処理装置4へ出力される。
なお、位置角度調整機構32は、各回転部322〜324における姿勢検出センサだけでなく、各移動部325〜327においても、当該平行移動における平行移動量を検出するセンサを備えていてもよい。さらに、校正装置3すなわち各部322〜327の駆動部や検出部は情報処理装置4と通信ケーブル33によって接続されており、情報処理装置4との間のデータの送受信が可能となっている。また、上記各駆動部や検出部の電源は、校正装置3内に備えたものであってもよいし、情報処理装置4内の電源或いは所定の外部電源でもよい。
情報処理装置4は、測定装置2と校正チャート31との位置合わせをするべく、測定装置2に校正チャート31を3次元測定させるとともに、測定装置2による測定により得られた測定データに基づいて校正装置3を制御する、すなわち校正チャート31の位置や角度(姿勢)を調整するための駆動動作や姿勢検出動作を制御するものである。ここでは、情報処理装置4は例えばPC(Personal Computer)である。
情報処理装置4は、情報処理装置4の制御プログラムを記憶するROM(Read Only Memory)、一時的にデータを保管するRAM(Random Access Memory)、及びこの制御プログラム等をROMから読み出して実行するマイクロコンピュータ等からなる主制御部40を備えており、この主制御部40によって上記駆動動作や姿勢検出動作の制御を行う。図6は、主制御部40の一例を示す機能ブロック図である。同図に示すように主制御部40は、測定指示部41、測定情報受信部42、ずれベクトル算出部43、姿勢検出情報受信部44、調整パラメータ算出部45、調整パラメータ送信部46、基準情報記憶部47及びエラー報知部48を備えている。
測定指示部41は、測定装置2に対する、校正チャート31の3次元測定を開始させるとともに、測定終了後に該3次元測定による測定情報を送信してくるよう指示する信号(通信コマンド)を出力するものである。測定情報受信部42は、測定装置2から送信されてきた3次元測定データ(測定情報)を受信するものである。
ずれベクトル算出部43は、測定情報受信部42により受信した3次元測定データに基づいて、測定装置座標系での校正チャート31の位置ずれ量及び角度ずれ量に関する「ずれベクトル」を算出するものである。ここでのずれベクトルは、謂わば、後述の調整パラメータ算出部45での位置ずれ量及び角度ずれ量の算出の前段階として、該位置ずれ量及び角度ずれ量を測定装置座標系における“ベクトル量”として定義するものである。なお、ここで算出されたずれベクトルは後述の調整パラメータ算出部45によりワールド座標系に変換され、位置角度調整機構32でのX、Y、Z軸回転、平行移動の各種調整パラメータが求められる。
<位置ずれベクトルの算出>
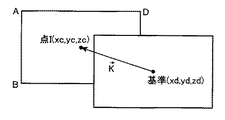
ずれベクトル算出部43は、3次元測定データから測定装置座標系での点Iの座標位置(I座標;図3参照)を算出し、このI座標と予め記憶されている基準座標とを比較して、基準座標に対するI座標のずれ量をベクトル(方向ベクトル)として算出する。この基準座標に対するI座標の“ずれ”を測定装置座標系でのXYZ軸方向全体で見た場合のずれと考えて、「XYZ位置ずれ」とも表現する。図7に示すように、上記I座標を(xc,yc,zc)とし、また、このI座標が本来あるべき基準座標、すなわち位置合わせが正しく行われている場合の理想(位置合わせの目標)とする座標を(xd,yd,zd)とすると、XYZ位置ずれベクトルKは以下の(7)式で表される。ただし、この“K”は図7中のKベクトルを示している。なお、校正チャート31が測定装置2の画角中央(撮影画像の中心)に位置する場合は、XYZ位置ずれベクトルKがZ軸と一致するため、xd=yd=0となる、すなわち基準座標は(0,0,zd)となる。
(kx,ky,kz)=(xc−xd,yc−yd,zc−zd) ・・・(7)
ずれベクトル算出部43は、3次元測定データから測定装置座標系での点Iの座標位置(I座標;図3参照)を算出し、このI座標と予め記憶されている基準座標とを比較して、基準座標に対するI座標のずれ量をベクトル(方向ベクトル)として算出する。この基準座標に対するI座標の“ずれ”を測定装置座標系でのXYZ軸方向全体で見た場合のずれと考えて、「XYZ位置ずれ」とも表現する。図7に示すように、上記I座標を(xc,yc,zc)とし、また、このI座標が本来あるべき基準座標、すなわち位置合わせが正しく行われている場合の理想(位置合わせの目標)とする座標を(xd,yd,zd)とすると、XYZ位置ずれベクトルKは以下の(7)式で表される。ただし、この“K”は図7中のKベクトルを示している。なお、校正チャート31が測定装置2の画角中央(撮影画像の中心)に位置する場合は、XYZ位置ずれベクトルKがZ軸と一致するため、xd=yd=0となる、すなわち基準座標は(0,0,zd)となる。
(kx,ky,kz)=(xc−xd,yc−yd,zc−zd) ・・・(7)
<角度ずれベクトルの算出>
角度ずれベクトルの算出方法は、X及びY軸に対するつまりX及びY軸で構成されるX−Y平面で考えた場合(所謂「あおり」を考えた場合)の角度ずれベクトル(XY軸角度ずれベクトルという)と、Z軸に対するつまりZ軸回りで考えた場合の角度ずれベクトル(Z軸角度ずれベクトル)とで区別される。
[XY軸角度ずれベクトルの算出]
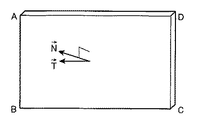
ずれベクトル算出部43は、3次元測定データから測定装置座標系における校正チャート31の頂面314の法線ベクトル(測定法線ベクトルNという)を算出するとともに、予め記憶されている上記位置合わせが正しく行われている場合の理想(位置合わせの目標)とする平面(基準平面;理想平面)の法線ベクトル(基準法線ベクトルTという)を取得する。ずれベクトル算出部43は、図8に示すように、これら測定法線ベクトルN=(nx,ny,nz)と基準法線ベクトルT=(tx,ty,tz)とを、XY軸角度ずれベクトルとして設定(定義)する。なお、図8中のNベクトル及びTベクトルは当該“N”及び“T”を示している。
角度ずれベクトルの算出方法は、X及びY軸に対するつまりX及びY軸で構成されるX−Y平面で考えた場合(所謂「あおり」を考えた場合)の角度ずれベクトル(XY軸角度ずれベクトルという)と、Z軸に対するつまりZ軸回りで考えた場合の角度ずれベクトル(Z軸角度ずれベクトル)とで区別される。
[XY軸角度ずれベクトルの算出]
ずれベクトル算出部43は、3次元測定データから測定装置座標系における校正チャート31の頂面314の法線ベクトル(測定法線ベクトルNという)を算出するとともに、予め記憶されている上記位置合わせが正しく行われている場合の理想(位置合わせの目標)とする平面(基準平面;理想平面)の法線ベクトル(基準法線ベクトルTという)を取得する。ずれベクトル算出部43は、図8に示すように、これら測定法線ベクトルN=(nx,ny,nz)と基準法線ベクトルT=(tx,ty,tz)とを、XY軸角度ずれベクトルとして設定(定義)する。なお、図8中のNベクトル及びTベクトルは当該“N”及び“T”を示している。
上記測定法線ベクトルの具体的な算出方法は、3次元測定データから測定装置座標系における校正チャート31の点A、B、C及びDの座標を算出するとともに、算出したこれらABCD4点の座標情報に基づいてすなわち四角形ABCDを平面近似することで平面ABCDを求める。そしてこの平面ABCDから測定法線ベクトルNを算出する(後述の変形態様における球の場合の校正チャートでは該球の下の平面部分を平面近似する)。なお、上記3次元測定データから点A、B、C、Dの座標を算出する方法は、具体的には例えば点Aの場合、図3に示すように頂面314と側面315及び側面316との3つの平面の式を求めておき、この3つの平面の交点(3次元座標点)求めるようにすればよい。なお、基準平面が測定装置に正対したものであるとする場合には、基準法線ベクトルTはZ軸方向の単位方向ベクトルと同じ(0,0,1)となる。
[Z軸角度ずれベクトルの算出]
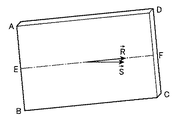
また、ずれベクトル算出部43は、3次元測定データから測定装置座標系における校正チャート31の頂面314の水平方向ベクトル(測定方向ベクトルRという)を算出するとともに、予め記憶されている上記位置合わせが正しく行われている場合の理想(位置合わせの目標)とする方向(基準方向;理想方向)のベクトル(基準方向ベクトルSという)を取得する。ずれベクトル算出部43は、図9に示すように、これら測定方向ベクトルR=(rx,ry,rz)と基準方向ベクトルS=(sx,sy,sz)とを、Z軸角度ずれベクトルとして設定(定義)する。なお、図9中のRベクトル及びSベクトルは当該“R”及び“S”を示している。
また、ずれベクトル算出部43は、3次元測定データから測定装置座標系における校正チャート31の頂面314の水平方向ベクトル(測定方向ベクトルRという)を算出するとともに、予め記憶されている上記位置合わせが正しく行われている場合の理想(位置合わせの目標)とする方向(基準方向;理想方向)のベクトル(基準方向ベクトルSという)を取得する。ずれベクトル算出部43は、図9に示すように、これら測定方向ベクトルR=(rx,ry,rz)と基準方向ベクトルS=(sx,sy,sz)とを、Z軸角度ずれベクトルとして設定(定義)する。なお、図9中のRベクトル及びSベクトルは当該“R”及び“S”を示している。
上記測定方向ベクトルの具体的な算出方法は、3次元測定データから測定装置座標系における校正チャート31の点A、B、C及びDの座標を算出するとともに、算出したこれらABCD4点の座標情報に基づいて上記図3に示すように中点E、Fの座標を算出し、この2点E、Fの座標情報から測定方向ベクトルRを算出する(後述の変形態様における球の場合の校正チャートでは該球の下の平面部分の同中点から求める)。ただし、測定方向ベクトルは必ずしも中点E、Fから求めずともよく、例えば中点G、H或いはこれ以外の点から求めてもよい。上記ABCD4点から平面ABCDを求め、この平面ABCD内の任意の2点から測定方向ベクトルを求めるなど任意な方法が採用可能である。この場合も、上記基準平面が測定装置に正対したものであるとする場合には、基準方向ベクトルSはX軸方向の単位方向ベクトルと同じ(1,0,0)となる。
姿勢検出情報受信部44は、位置角度調整機構32(各回転部322〜324)の姿勢検出センサにより検出されて出力された校正チャート31の姿勢検出情報、例えば上述した校正装置座標系でのX軸、Y軸及びZ回転それぞれの角度絶対値(ψ0,φ0,θ0)の情報を受信するものである。
調整パラメータ算出部45は、位置角度調整機構32における当該位置合わせに関する調整駆動に用いる調整パラメータを算出するものである。調整パラメータ算出部45は、姿勢検出情報受信部44により受信された姿勢検出情報を用いて、ずれベクトル算出部43により算出されたずれベクトルを測定装置座標系から校正装置座標系に変換し、この変換情報から調整パラメータを求める。このことについて以下に具体的に説明する。
先ず、図10に示すように測定装置座標系(ローカル座標系)を校正装置座標系つまりワールド座標系へ変換する方法を説明する。ここで、思考を逆にして、ワールド座標系から始めて測定装置座標系に変換されたと考えると、すなわち、位置角度調整機構32を上記角度絶対値分だけY軸にθ0、Z軸にφ0、X軸にψ0度回転し、続いて原点を平行移動(この平行移動を変換行列L0で表す)することにより測定装置座標系に変換されたと考えると、この変換は、ワールド座標系上の座標をP’(x’,y’,z’)、測定装置座標系上の座標をP(x,y,z)とおいて、以下の(8)、(9)式と表される。
P=M0・P’ ・・・(8)
M0=Yθ0・Zφ0・Xψ0・L0 ・・・(9)
P=M0・P’ ・・・(8)
M0=Yθ0・Zφ0・Xψ0・L0 ・・・(9)
そこで上記(8)、(9)式をワールド座標系への変換に戻すと以下の(10)、(11)式が得られる。
P’=M0 −1・P ・・・(10)
M0 −1=L0 −1・Xψ0 −1・Zφ0 −1・Yθ0 −1 ・・・(11)
P’=M0 −1・P ・・・(10)
M0 −1=L0 −1・Xψ0 −1・Zφ0 −1・Yθ0 −1 ・・・(11)
上記(10)、(11)式のように逆行列を掛けることで、測定装置座標系上の例えば点A〜H(図3参照)がワールド座標系A’〜H’となるような変換がなされる。
測定装置座標系の方向ベクトルpについて当該変換を行う場合は、平行移動の部分(変換行列L0)は行わないため、上記(10)、(11)式は以下の(12)、(13)式のように表される。
Q0 −1=Xψ0 −1・Zφ0 −1・Yθ0 −1 ・・・(13)
調整パラメータ算出部45は、角度絶対値(ψ0,φ0,θ0)の情報を用いてこれら測定装置座標系のベクトルを考える場合の(12)、(13)式を算出する。そして、調整パラメータ算出部45は、この(12)、(13)式に示す変換式を用いて、上記ずれベクトル算出部43において求めた、測定装置座標系としての位置ずれベクトルK、測定法線ベクトルN、基準法線ベクトルT、測定方向ベクトルR及び基準方向ベクトルSを、ワールド座標系に変換する。このワールド座標系へ変換された各ベクトルを、K’=(kx’,ky’,kz’)、N’=(nx’,ny’,nz’)、T’=(tx’,ty’,tz’)、R’=(rx’,ry’,rz’)、S’=(sx’,sy’,sz’)とする。
続いて、調整パラメータ算出部45は、上記ワールド座標系へ変換された各ベクトルの情報(この時点では平行移動に関するベクトルK’の情報は使用しない)を用いて、X軸回りで見た場合のワールド座標系での角度ずれ量(X軸角度ずれ量という;以降同様)、Y軸角度ずれ量、及びZ軸角度ずれ量を算出する。
<X軸角度ずれ量の算出>
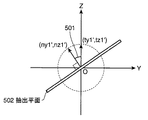
X軸角度ずれ量は、YZ平面に投影した測定法線ベクトルN’と基準法線ベクトルT’とから求められる、すなわち、図11に示すように、測定法線ベクトルN’のYZ成分を正規化してなる正規化測定法線ベクトル(ny1’,nz1’)と、基準法線ベクトルT’のYZ成分を正規化してなる正規化基準法線ベクトル(ty1’,tz1’)とによってなされる角度(角度501)として定義される。つまり、この角度501をX軸角度ずれ量ψとすると、以下の(14)式を満たすψを求めればよい。なお、図11は、X軸の正方向から見たYZ平面図であり、例えばZ軸方向を上記正規化基準法線ベクトル方向(理想方向)とした場合を示している。また、符号502は、上記正規化測定法線ベクトル(ny1’,nz1’)を有する、YZ平面と垂直な方向の平面(抽出平面という)を示している。また、(14)式はベクトル(ny1’,nz1’)と(ty1’,tz1’)との内積を示している。
cosψ=ny1’・ty1’+nz1’・tz1’ ・・・(14)
X軸角度ずれ量は、YZ平面に投影した測定法線ベクトルN’と基準法線ベクトルT’とから求められる、すなわち、図11に示すように、測定法線ベクトルN’のYZ成分を正規化してなる正規化測定法線ベクトル(ny1’,nz1’)と、基準法線ベクトルT’のYZ成分を正規化してなる正規化基準法線ベクトル(ty1’,tz1’)とによってなされる角度(角度501)として定義される。つまり、この角度501をX軸角度ずれ量ψとすると、以下の(14)式を満たすψを求めればよい。なお、図11は、X軸の正方向から見たYZ平面図であり、例えばZ軸方向を上記正規化基準法線ベクトル方向(理想方向)とした場合を示している。また、符号502は、上記正規化測定法線ベクトル(ny1’,nz1’)を有する、YZ平面と垂直な方向の平面(抽出平面という)を示している。また、(14)式はベクトル(ny1’,nz1’)と(ty1’,tz1’)との内積を示している。
cosψ=ny1’・ty1’+nz1’・tz1’ ・・・(14)
<Y軸角度ずれ量の算出>
Y軸角度ずれ量も同様に、測定法線ベクトルN’と基準法線ベクトルT’とをZX平面に投影し、この測定法線ベクトルN’のZX成分を正規化してなる正規化測定法線ベクトル(nx2’,nz2’)と、基準法線ベクトルT’のZX成分を正規化してなる正規化基準法線ベクトル(tx2’,tz2’)との角度として定義したY軸角度ずれ量を、以下の(15)式を満たすθとして求める。
cosθ=nz2’・tz2’+nx2’・tx2’ ・・・(15)
Y軸角度ずれ量も同様に、測定法線ベクトルN’と基準法線ベクトルT’とをZX平面に投影し、この測定法線ベクトルN’のZX成分を正規化してなる正規化測定法線ベクトル(nx2’,nz2’)と、基準法線ベクトルT’のZX成分を正規化してなる正規化基準法線ベクトル(tx2’,tz2’)との角度として定義したY軸角度ずれ量を、以下の(15)式を満たすθとして求める。
cosθ=nz2’・tz2’+nx2’・tx2’ ・・・(15)
<Z軸角度ずれ量の算出>
Z軸角度ずれ量も同様に、測定方向ベクトルR’と基準方向ベクトルS’とをXY平面に投影し、この測定方向ベクトルR’のXY成分を正規化してなる正規化測定方向ベクトル(rx3’,ry3’)と、基準方向ベクトルS’のXY成分を正規化してなる正規化基準法線ベクトル(sx3’,sy3’)との角度として定義したZ軸角度ずれ量を、以下の(16)式を満たすφとして求める。
cosφ=dx3’・sx3’+dy3’・sy3’ ・・・(16)
Z軸角度ずれ量も同様に、測定方向ベクトルR’と基準方向ベクトルS’とをXY平面に投影し、この測定方向ベクトルR’のXY成分を正規化してなる正規化測定方向ベクトル(rx3’,ry3’)と、基準方向ベクトルS’のXY成分を正規化してなる正規化基準法線ベクトル(sx3’,sy3’)との角度として定義したZ軸角度ずれ量を、以下の(16)式を満たすφとして求める。
cosφ=dx3’・sx3’+dy3’・sy3’ ・・・(16)
このようにして調整パラメータ算出部45によってX軸角度ずれ量ψ、Y軸角度ずれ量θ及びZ軸角度ずれ量φが算出される。校正装置3すなわち位置角度調整機構32は、これら角度ずれ量ψ、θ及びφの情報と、上記調整パラメータ算出部45により求めたXYZ位置ずれベクトルK’との情報に基づいて、角度ずれを修正(調整)するべく各X、Z、Y軸回転部322〜324を駆動させるとともに、位置ずれ(XYZ位置ずれ)を修正するべく各Y、X、Z軸移動部325〜327を駆動させることで、測定装置2に対する校正チャート31の位置合わせを行う。ところで、これら位置・角度ずれ量は、測定装置座標系での位置、角度ずれ量がワールド座標系に変換されたものとしてのずれ量であるため、位置角度調整機構32による実際の駆動では、上記求められた角度ずれ量ψ、θ及びφによる駆動方向と逆の方向に駆動させることになる。
上記位置・角度ずれを修正する前の座標をP’(x’,y’,z’)、位置・角度ずれを修正した後の座標をP”(x”,y”,z”)とすると、Y軸中心に−(マイナス)θ回転、Z軸中心に−φ回転、X軸中心に−ψ回転して、さらに−K’だけ平行移動(この平行移動を変換行列Lで定義する)するように、すなわち以下の(17)式に示す変換が行われるように、s以下の(18)式に示す変換行列Mの情報を用いて位置角度調整機構32を駆動させる。これにより当該校正チャート31の位置合わせを行うことができる。調整パラメータ算出部45は、この変換行列Mを調整パラメータとして算出する。
P”=M・P’ ・・・(17)
M=Y−θ・Z−φ・X−ψ・L ・・・(18)
P”=M・P’ ・・・(17)
M=Y−θ・Z−φ・X−ψ・L ・・・(18)
調整パラメータ送信部46は、調整パラメータ算出部45により算出された調整パラメータ(変換行列M)を位置角度調整機構32の各駆動部へ送信するものである。
位置角度調整機構32は、調整パラメータ送信部46から送信されてきた(情報処理装置4から指示された)調整パラメータ分だけ自動的に駆動する。当該位置角度調整機構32による調整パラメータに基づく位置合わせに関する駆動のことを適宜「調整駆動」という。この調整駆動動作は、例えば図10において、校正チャート31の位置が測定装置座標系で例えば+Y方向にずれていると測定装置2により測定されると、この測定結果から求めた調整パラメータに基づいて、このずれを修正するべく位置角度調整機構32により校正チャート31を校正装置座標系で例えば+Z方向及び−Y方向に、つまり+Z方向ベクトルと−Y方向ベクトルとの合成ベクトル方向に移動させる動作であると言える。
基準情報記憶部47は、校正チャート31の位置合わせにおける基準(理想、目標)となる位置及び角度に関する情報(基準情報という)を既定値として記憶しておくものである。この基準情報は、具体的には上記位置ずれにおける基準座標、角度ずれにおける基準法線ベクトルT及び基準方向ベクトルSの情報である。なお、基準情報記憶部47は、校正チャート31の実際の寸法・形状情報(真値、設計値)、例えば図3では頂面314や側面315〜318の各辺の長さ等の情報も記憶している。ただし、この寸法・形状情報は、本実施形態での“位置合わせ”が完了した後、別途、校正動作を行う際の比較用として使用される。すなわち、位置合わせ後の校正チャート31を3次元測定して得た現在の寸法・形状情報と校正チャート31の本来あるべき寸法・形状情報とが比較される。本実施形態は、この校正の前段階としての“位置合わせ”に関するものである。
エラー報知部48は、位置合わせに関する3次元測定システム1各部、具体的には例えば上記測定装置2、位置角度調整機構32(校正装置3)、ずれベクトル算出部43、調整パラメータ算出部45、姿勢検出情報受信部44の少なくとも1つの機能部について動作のエラー(異常)を検出する或いは異常の有無を判別するとともに、エラーを検出した場合には、当該エラー情報を報知するものである。
エラー報知部48は、例えば測定装置2による校正チャート31の測定が失敗するなどして校正チャート31の一部又は全域のデータが取得できなかった(上記各ベクトルの算出が行えなかった)ことを測定装置2から検出した場合に、当該エラーの旨を表示や音声によって出力させる。さらに具体的には、この場合、エラー報知部48は、例えば測定指示部41により測定装置2へ測定指示が行われてからの時間計測つまりタイムカウントを行い、所定時間が経過しても測定データが送信されてこない場合をエラーであると検出(判別)し、当該エラーのメッセージや警告音を情報処理装置4或いは測定装置2のモニタ(液晶画面)やスピーカから出力させる。
また例えば、測定装置2による3次元計測やこの3次元測定データに基づく位置、角度ずれ量などの算出は適正に行われたものの、例えばこの算出された値が位置角度調整機構32の実際の可動範囲を超過していることが判定(検出)され、このため調整駆動を行うことができないという場合などにも、同様にしてエラー報知部48によりエラー報知がなされる。なお、各機能部においてエラーが生じたことを検出する方法やエラー情報を報知する方法はこれらに限らず任意なものが採用可能である。
このような構成の3次元測定システム1において、校正チャート31を測定するときは、例えば上記モニタの画像で(例えばモニタ画像を見ながら)おおよその位置や姿勢を合わせてから、測定装置2による測定を行うとよい。これは、3次元測定データを用いた位置合わせを精度良く(確実に)且つより高速に行うためには、校正チャート31全領域の3次元測定データを取得することが好ましいからである。
図12は、3次元測定システム1による位置合わせに関する全体的な動作の一例について説明するフローチャートである。先ず測定指示部41の指示等に応じて測定装置2により校正チャート31の測定が行われて3次元測定データが取得される(ステップS1)。次にこの測定装置2により得られた3次元測定データ(校正チャート31の形状情報)に基づいて、情報処理装置4により調整パラメータが算出される(ステップS2)。そして、算出された調整パラメータが校正装置3へ送信され(ステップS3)、この調整パラメータに基づいて、校正装置3の位置角度調整機構32により校正チャート31の調整駆動が行われる(ステップS4)。
図13は、上記図12のステップS2における調整パラメータ算出の詳細な動作の一例について説明するフローチャートである。ステップS2では先ず測定装置2から送信されてきた3次元測定データが情報処理装置4の測定情報受信部42によって受信される(ステップS21)。受信されたこの3次元測定データと、基準情報記憶部47に記憶された基準情報とに基づいて、ずれベクトル算出部43によって測定装置座標系での位置ずれベクトル及び角度ずれベクトル(XY軸角度ずれベクトル、Z軸角度ずれベクトル)が算出(設定)される(ステップS22)。次に位置角度調整機構32の姿勢検出センサにより検出された校正チャート31の姿勢検出情報が姿勢検出情報受信部44により受信される(ステップS23)。受信されたこの姿勢検出情報に基づいて、調整パラメータ算出部45により上記測定装置座標系での位置ずれベクトル及び角度ずれベクトルが校正装置座標系(ワールド座標系)に変換される(ステップS24)。そして、この変換された角度ずれベクトルからX軸、Y軸及びZ軸角度ずれ量(ψ、θ及びφ)が算出されて(ステップS25)、この校正装置座標系でのX軸、Y軸及びZ軸角度ずれ量と、上記変換された校正装置座標系での位置ずれベクトルとの情報に基づいて、調整パラメータとしての変換行列Mが算出される(ステップS26)。
以上のように本実施形態における3次元測定システム1(位置合わせシステム)によれば、測定装置2(測定手段)によって、立体的な測定対象物である立体測定物(校正チャート31或いは校正チャート700)が非接触に3次元測定されて該立体測定物の3次元データが取得される。また、基準情報記憶部47(記憶手段)によって、測定手段と立体測定物との位置合わせの基準となる基準情報(本実施形態では、基準座標、基準法線ベクトルT及び基準方向ベクトルS等の情報)が予め記憶される。また、ずれベクトル算出部43(ズレ量算出手段)によって、3次元データと基準情報とに基づいて測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が算出される。そして、調整パラメータ算出部45(変換手段)によって、位置ずれ量及び角度ずれ量が位置合わせにおける調整動作用の調整パラメータに変換され、位置角度調整機構32(調整手段)によって、調整パラメータに基づいて立体測定物の位置及び角度が調整される。
このように測定手段と立体測定物との位置合わせが、調整手段による立体測定物の位置及び角度の調整により行われるので、すなわち当該位置合わせが、測定手段を動かさずに、立体測定物を動かすことによって行われるので、広いスペース(設置スペース或いは移動スペース)を必要とすることなく位置合わせすることができる。また、3次元データと基準情報とに基づいて測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が自動的に算出されるので、ユーザが基準となる位置を指示する動作が必要がなく、容易に位置合わせすることができる。位置ずれ量及び角度ずれ量が調整手段の調整パラメータに変換されることからも、この調整パラメータを用いて、当該位置合わせのための調整作業が例えば自動駆動、手動操作いずれで行う場合にも容易に行えるようになる。また、測定手段を動かさずに(位置や向きを変えることなく)、実際に測定するのと同じ姿勢を保った状態で当該位置合わせが行われるため、姿勢差の発生を防止することができ、ひいては高精度な位置合わせが可能となる。測定手段による立体測定物の3次元測定により3次元データが取得される、すなわち調整手段による調整動作において立体測定物の3次元データが用いられることからも(2次元データを用いた位置合わせを行う場合と比べて)、高精度な位置合わせが可能となる。
また、X、Y及びZ軸回転部322〜324(位置角度調整機構32;姿勢検出手段)によって、立体測定物の姿勢が検出される。そして、変換手段によって、姿勢検出手段による姿勢検出情報を用いて測定手段の座標系と調整手段の座標系との関係を示す関係式(座標変換式;例えば座標変換行列M)が算出され、該関係式に基づく座標変換が行われることによって、測定手段の座標系における位置ずれ量及び角度ずれ量が、調整手段の座標系における調整パラメータに変換されるので、測定手段側で求めた位置ずれ量及び角度ずれ量を、調整手段側での位置ずれ量及び角度ずれ量として扱うことができるようになる。これにより、測定手段を動かすことなく立体測定物の方を動かして当該位置合わせする構成を実現することができ、ひいては広いスペース(設置又は移動スペース)を必要とせず、容易且つ高精度に位置合わせすることが可能となる。
また、立体測定物が、測定手段の校正を行うための、形状が既知である基準立体物(構成チャート31或いは700)とされる。そして、調整手段によって、校正を行う前段階としての位置合わせを行うべく基準立体物の位置及び角度が調整されるので、位置合わせシステムを、基準立体物を用いて測定手段の校正を行う校正システムとして使用することができる、すなわち3次元測定システム1を位置合わせシステムとすることができる。
また、調整手段が備える自動調整機構によって、調整を行うべく調整パラメータに基づいて自動的に駆動が行われるので、調整手段による調整動作を自動調整機構によって自動的に行うことができ、測定手段と立体測定物との位置合わせが一層容易に行えるようになる。
また、調整パラメータ算出部45(或いはモニタやスピーカ;調整情報報知手段)によって、調整パラメータに関する情報がユーザに報知される。そして、調整手段が備える手動調整機構(例えば上述の治具)によって、調整を行うべくユーザの手動操作による駆動が行われるので、調整手段による調整動作をユーザによる手動調整機構を用いた手動操作によって行うことができ、ひいては測定手段と立体測定物との位置合わせ動作における自由度が高くなる。
また、基準立体物(校正チャート31)が角錐台状のものとされるので、角錐台状の簡易な形状の基準立体物を用いて、容易に且つ精度良く位置ずれ量及び角度ずれ量を求めて当該位置合わせを行うことができるとともに、この基準立体物を用いて、位置合わせ後の校正を容易に且つ精度良く行うことができる。
また、エラー報知部48(異常検出手段)によって、測定手段、ズレ量算出手段、変換手段、調整手段及び姿勢検出手段の少なくとも1つの手段について動作の異常が検出される。そして、エラー報知部48(異常報知手段)によって、異常検出手段により異常が検出された場合に、該異常を示す情報(異常情報)がユーザに報知されるので、位置合わせシステムの動作(位置合わせの動作)に異常が発生していることをユーザが容易に知ることができる。
また、位置合わせシステムが、測定手段である測定装置2と、立体測定物(校正チャート31或いは700)と、該立体測定物の位置及び角度を変化させることが可能に支持する調整手段(位置角度調整機構32)とからなる被測定装置(校正装置3)と、記憶手段、ズレ量算出手段及び変換手段を内蔵するとともに、測定装置及び被測定装置それぞれと通信可能に接続された情報処理装置4とからなるものとされるので、位置合わせシステムを、測定装置2、校正装置3及び情報処理装置4からなるシンプルな構成のシステムとすることができる。
また、本実施形態における位置合わせ方法によれば、第1の工程において、立体的な測定対象物である立体測定物が非接触に3次元測定されて該立体測定物の3次元データが取得される。第2の工程において、立体測定物を測定する測定手段と該立体測定物との位置合わせの基準となる基準情報が予め取得される。また、第3の工程において、3次元データと基準情報とに基づいて、測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が算出される。そして、第4の工程において、位置ずれ量及び角度ずれ量が位置合わせにおける調整動作用の調整パラメータに変換され、第5の工程において、調整パラメータに基づいて、立体測定物の位置及び角度が調整される。
このように、測定手段と立体測定物との位置合わせが、立体測定物の位置及び角度の調整により行われるので、すなわち当該位置合わせが、測定手段を動かさずに、立体測定物を動かすことによって行われるので、広いスペース(設置スペース或いは移動スペース)を必要とすることなく位置合わせすることができる。また、3次元データと基準情報とに基づいて測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量が自動的に算出されるので、ユーザが基準となる位置を指示する動作が必要がなく、容易に位置合わせすることができる。位置ずれ量及び角度ずれ量が調整動作用の調整パラメータに変換されることからも、この調整パラメータを用いて、当該位置合わせのための調整作業が例えば自動駆動、手動操作いずれで行う場合にも容易に行えるようになる。また、測定手段を動かさずに(位置や向きを変えることなく)、実際に測定するのと同じ姿勢を保った状態で当該位置合わせが行われるため、姿勢差の発生を防止することができ、ひいては高精度な位置合わせが可能となる。測定手段による立体測定物の3次元測定により3次元データが取得される、すなわち立体測定物の位置及び角度の調整動作において立体測定物の3次元データが用いられることからも(2次元データを用いた位置合わせを行う場合と比べて)、高精度な位置合わせが可能となる。
また、上記位置合わせ方法が、第6の工程において、立体測定物の姿勢が検出され、上記第4の工程において、当該第6の工程において検出された姿勢検出情報を用いて測定手段の座標系と、調整を行う調整手段の座標系との関係を示す関係式が算出され、該関係式に基づく座標変換が行われることによって、測定手段の座標系における位置ずれ量及び角度ずれ量が、調整手段の座標系における調整パラメータに変換される方法とされるので、測定手段側で求めた位置ずれ量及び角度ずれ量を、調整手段側での位置ずれ量及び角度ずれ量として扱うことができるようになる。これにより、測定手段を動かすことなく立体測定物の方を動かして当該位置合わせする構成を実現することができ、ひいては広いスペースを必要とせず、容易且つ高精度に位置合わせすることが可能となる。
なお、本発明は、以下の態様をとることができる。
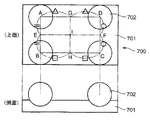
(A)校正チャートは図3に示す形状のものでなく、例えば図14に示すように複数の球体を備えてなる校正チャート700であってもよい。この校正チャート700は、例えば長方形の平板体701の一平面側(上面側)に複数ここでは4つの同じ球体702が配設されている。各球体702は下部が平板体701に没入した状態で固定されており、これら球体702の中心点により上面視で四角形ABCD(校正チャート31の四角形ABCDに相当)が構成されている。
(A)校正チャートは図3に示す形状のものでなく、例えば図14に示すように複数の球体を備えてなる校正チャート700であってもよい。この校正チャート700は、例えば長方形の平板体701の一平面側(上面側)に複数ここでは4つの同じ球体702が配設されている。各球体702は下部が平板体701に没入した状態で固定されており、これら球体702の中心点により上面視で四角形ABCD(校正チャート31の四角形ABCDに相当)が構成されている。
このように、校正チャート(基準立体物)が所定の位置関係で(ここでは平板体の一平面側に位置する位置関係で)配設された複数の球体からなる校正チャート700とされるので、所定の位置関係で配設された複数の球体からなる簡易な形状の基準立体物を用いて、容易に且つ精度良く位置ずれ量及び角度ずれ量を求めて当該位置合わせを行うことができるとともに、この基準立体物を用いて、位置合わせ後の校正を容易に且つ精度良く行うことができる。ただし、複数の球体が互いに所定の位置関係となるように固定して設置できるすなわち支持可能なものであれば、必ずしも平板体に配設されたものでなくともよく、当該球体を支持する支持部の形状は任意なものが採用可能である。なお、校正チャートはこれら(校正チャート31、700)のようなものに限定されず、要は形状が既知の立体測定物であれば何れのものでも構わない。
(B)3次元測定システム1は、測定装置2と校正チャート31との位置ずれ量、角度ずれ量がある一定範囲内に収束するまで上記位置合わせ動作(図12のステップS1からステップS4までの動作)を繰り返し行う構成であってもよい。この場合、主制御部40に例えば収束判定部を備えておき、第1回目の位置合わせ動作(位置角度調整機構32による調整駆動)が終了した後、自動的に測定装置2に校正チャート31を測定させる。そして、この測定により得られた位置ずれ量、角度ずれ量(例えば図13のステップS22における位置、角度ずれベクトル量)が所定の閾値よりも小さい値であるか否かを収束判定部により判定し、“否”と判定された場合には引き続いて(ステップS22以降の)位置合わせ動作を実行させる。
(C)校正チャート31の姿勢(角度絶対値)を検出する方法は上述に限らず任意な方法でよい。例えば位置角度調整機構32の冶具(ネジやつまみ)等に分度器等を取り付けておき、ユーザがこの目盛りを目で読み取るような方法であってもよい。また、本実施形態では、校正チャート31の姿勢検出はこのように校正装置3(位置角度調整機構32)にて行うようにしているが、これに限らず、校正チャート31の姿勢検出を測定装置2側で行う、すなわち測定装置2によって校正チャート31の回転角度(傾斜角度、角度絶対値)を測定するようにしてもよい。この場合、例えば測定装置2のスタンド23に角度の目盛りを取り付けておき、その目盛り値を読み取るようにしてもよい。また、当該姿勢検出は、加速度センサなどの姿勢センサを測定装置2や校正チャート31に取り付けることでも実現できる。
(D)上記実施形態では、校正チャート31の位置・角度を調整するものとして、位置角度調整機構32のように、情報処理装置4(PC)からの指示に基づいて自動的に調整駆動するものを採用しているが、これに限らず、情報処理装置4のモニタ(アプリケーション上)等に上述で求めた調整パラメータに関する調整情報を、例えば治具の回転目盛り量といった調整量(駆動量)の情報でモニタ等に表示し、この表示された調整量を参照しつつユーザ自身が位置角度調整機構32を手動(マニュアル)で操作して調整駆動を行うようにしてもよい。ただし、この治具が当該ユーザによる手動での調整を行う手動調整機構に該当する。なお、この場合、調整パラメータ算出部45によって、上記調整量をユーザに報知するべくこの調整量情報のモニタ等への表示制御が行われる構成でもよい。
(E)上記実施形態では、測定装置2による測定データに基づく調整パラメータの算出等の演算を、測定装置2とは別に設けた情報処理装置4にて行っているが、この演算を測定装置2にて行うすなわち測定装置2に演算部が内蔵されていてもよい。この場合は情報処理装置4が不要であり、測定装置2と位置角度調整機構32とが直接、通信ケーブル等で接続されることになる。
(F)上記実施形態は、測定装置2と校正チャート31との位置合わせについて記載しているが、必ずしも校正チャートでなくてもよく、測定装置2と形状が既知の測定物との位置合わせにおいても適用可能である。すなわち“校正”を行うシステム(3次元測定システム)での位置合わせでなくともよく、要は測定に際して相対する2者間の位置合わせを行うものであれば、3次元測定システムでなく例えば精度検証システム(測定対象物が所要の形状精度を有しているか否かを検証するシステム)であってもよい。
1 3次元測定システム(位置合わせシステム)
2 測定装置(測定手段)
23 スタンド
24、33 通信ケーブル
231 フレーム体
3 校正装置(被測定装置)
31 校正チャート(立体測定物、基準立体物)
314 頂面
32 位置角度調整機構(調整手段)
321 載置台
322 X軸回転部(姿勢検出手段)
323 Z軸回転部(姿勢検出手段)
324 Y軸回転部(姿勢検出手段)
325 Y軸移動部
326 X軸移動部
327 Z軸移動部
328 支持フレーム
329 基台
4 情報処理装置
40 主制御部
41 測定指示部
42 測定情報受信部
43 ずれベクトル算出部(ズレ量算出手段)
44 姿勢検出情報受信部(姿勢検出手段)
45 調整パラメータ算出部(変換手段、調整情報報知手段)
46 調整パラメータ送信部
47 基準情報記憶部(記憶手段)
48 エラー報知部(異常検出手段、異常報知手段)
700 校正チャート(立体測定物、基準立体物)
701 平板体
702 球体
2 測定装置(測定手段)
23 スタンド
24、33 通信ケーブル
231 フレーム体
3 校正装置(被測定装置)
31 校正チャート(立体測定物、基準立体物)
314 頂面
32 位置角度調整機構(調整手段)
321 載置台
322 X軸回転部(姿勢検出手段)
323 Z軸回転部(姿勢検出手段)
324 Y軸回転部(姿勢検出手段)
325 Y軸移動部
326 X軸移動部
327 Z軸移動部
328 支持フレーム
329 基台
4 情報処理装置
40 主制御部
41 測定指示部
42 測定情報受信部
43 ずれベクトル算出部(ズレ量算出手段)
44 姿勢検出情報受信部(姿勢検出手段)
45 調整パラメータ算出部(変換手段、調整情報報知手段)
46 調整パラメータ送信部
47 基準情報記憶部(記憶手段)
48 エラー報知部(異常検出手段、異常報知手段)
700 校正チャート(立体測定物、基準立体物)
701 平板体
702 球体
Claims (11)
- 立体的な測定対象物である立体測定物と、
前記立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する測定手段と、
前記測定手段と前記立体測定物との位置合わせの基準となる基準情報を予め記憶する記憶手段と、
前記3次元データと前記基準情報とに基づいて、前記測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量を算出するズレ量算出手段と、
前記位置ずれ量及び角度ずれ量を前記位置合わせにおける調整動作用の調整パラメータに変換する変換手段と、
前記調整パラメータに基づいて、前記立体測定物の位置及び角度を調整する調整手段とを備えることを特徴とする位置合わせシステム。 - 前記立体測定物の姿勢を検出する姿勢検出手段をさらに備え、
前記変換手段は、
前記姿勢検出手段による姿勢検出情報を用いて前記測定手段の座標系と前記調整手段の座標系との関係を示す関係式を算出し、該関係式に基づく座標変換を行うことによって、前記測定手段の座標系における位置ずれ量及び角度ずれ量を、前記調整手段の座標系における前記調整パラメータに変換することを特徴とする請求項1に記載の位置合わせシステム。 - 前記立体測定物は、前記測定手段の校正を行うための、形状が既知である基準立体物であって、
前記調整手段は、前記校正を行う前段階としての前記位置合わせを行うべく前記基準立体物の位置及び角度を調整することを特徴とする請求項1又は2に記載の位置合わせシステム。 - 前記調整手段は、前記調整を行うべく前記調整パラメータに基づいて自動的に駆動する自動調整機構を備えることを特徴とする請求項1〜3のいずれかに記載の位置合わせシステム。
- 前記調整パラメータに関する情報をユーザに報知する調整情報報知手段をさらに備え、
前記調整手段は、前記調整を行うべく前記ユーザの手動操作によって駆動する手動調整機構を備えることを特徴とする請求項1〜3のいずれかに記載の位置合わせシステム。 - 前記基準立体物は、角錐台状のものであることを特徴とする請求項1〜5のいずれかに記載の位置合わせシステム。
- 前記基準立体物は、所定の位置関係で配設された複数の球体からなるものであることを特徴とする請求項1〜5のいずれかに記載の位置合わせシステム。
- 前記測定手段、ズレ量算出手段、変換手段、調整手段及び姿勢検出手段の少なくとも1つの手段について動作の異常を検出する異常検出手段と、
前記異常検出手段により異常が検出された場合に、該異常を示す情報をユーザに報知する異常報知手段とをさらに備えることを特徴とする請求項2〜7のいずれかに記載の位置合わせシステム。 - 前記位置合わせシステムは、
前記測定手段である測定装置と、
前記立体測定物と、該立体測定物の位置及び角度を変化させることが可能に支持する前記調整手段とからなる被測定装置と、
前記記憶手段、ズレ量算出手段及び変換手段を内蔵するとともに、前記測定装置及び被測定装置それぞれと通信可能に接続された情報処理装置とからなるものであることを特徴とする請求項1〜8のいずれかに記載の位置合わせシステム。 - 立体的な測定対象物である立体測定物を非接触に3次元測定して該立体測定物の3次元データを取得する第1の工程と、
前記立体測定物を測定する測定手段と該立体測定物との位置合わせの基準となる基準情報を予め取得する第2の工程と、
前記3次元データと前記基準情報とに基づいて、前記測定手段の座標系における当該測定手段と立体測定物との相互の位置ずれ量及び角度ずれ量を算出する第3の工程と、
前記位置ずれ量及び角度ずれ量を前記位置合わせにおける調整動作用の調整パラメータに変換する第4の工程と、
前記調整パラメータに基づいて、前記立体測定物の位置及び角度を調整する第5の工程とを有することを特徴とする位置合わせ方法。 - 前記立体測定物の姿勢を検出する第6の工程をさらに有し、
前記第4の工程は、
前記第6の工程において検出された姿勢検出情報を用いて前記測定手段の座標系と、前記調整を行う調整手段の座標系との関係を示す関係式を算出し、該関係式に基づく座標変換を行うことによって、前記測定手段の座標系における位置ずれ量及び角度ずれ量を、前記調整手段の座標系における前記調整パラメータに変換する工程であることを特徴とする請求項10に記載の位置合わせ方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006306406A JP2008122228A (ja) | 2006-11-13 | 2006-11-13 | 位置合わせシステム及び位置合わせ方法 |
| EP07021698A EP1923663A1 (en) | 2006-11-13 | 2007-11-08 | Measuring device, positioning system and positioning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006306406A JP2008122228A (ja) | 2006-11-13 | 2006-11-13 | 位置合わせシステム及び位置合わせ方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008122228A true JP2008122228A (ja) | 2008-05-29 |
Family
ID=39267789
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006306406A Pending JP2008122228A (ja) | 2006-11-13 | 2006-11-13 | 位置合わせシステム及び位置合わせ方法 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1923663A1 (ja) |
| JP (1) | JP2008122228A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012112911A (ja) * | 2010-11-29 | 2012-06-14 | National Institute Of Advanced Industrial & Technology | キャリブレーション用校正治具、校正治具を備えた3次元計測システム |
| JP2015214017A (ja) * | 2014-05-07 | 2015-12-03 | コイロ ベズィッツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー エーデーファウ−ディーンストライストゥングス コマンデイトゲゼルシャフト | 金属加工物用鋸盤 |
| JP2017026551A (ja) * | 2015-07-27 | 2017-02-02 | 日産自動車株式会社 | キャリブレーションターゲット、キャリブレーション方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117733873B (zh) * | 2024-02-19 | 2024-04-19 | 深圳市德富莱智能科技股份有限公司 | 一种三维自动校准系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5579444A (en) * | 1987-08-28 | 1996-11-26 | Axiom Bildverarbeitungssysteme Gmbh | Adaptive vision-based controller |
| US5631973A (en) * | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| US6072898A (en) * | 1998-01-16 | 2000-06-06 | Beaty; Elwin M. | Method and apparatus for three dimensional inspection of electronic components |
| DE60236019D1 (de) | 2001-12-28 | 2010-05-27 | Mariner Acquisition Co Llc | Stereoskopisches dreidimensionales metrologiesystem und -verfahren |
-
2006
- 2006-11-13 JP JP2006306406A patent/JP2008122228A/ja active Pending
-
2007
- 2007-11-08 EP EP07021698A patent/EP1923663A1/en not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012112911A (ja) * | 2010-11-29 | 2012-06-14 | National Institute Of Advanced Industrial & Technology | キャリブレーション用校正治具、校正治具を備えた3次元計測システム |
| JP2015214017A (ja) * | 2014-05-07 | 2015-12-03 | コイロ ベズィッツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー エーデーファウ−ディーンストライストゥングス コマンデイトゲゼルシャフト | 金属加工物用鋸盤 |
| US10576559B2 (en) | 2014-05-07 | 2020-03-03 | Keuro Besitz Gmbh & Co. Edv-Dienstleistungs Kg | Sawing machine for sawing metal workpieces |
| JP2017026551A (ja) * | 2015-07-27 | 2017-02-02 | 日産自動車株式会社 | キャリブレーションターゲット、キャリブレーション方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1923663A1 (en) | 2008-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210114221A1 (en) | Method of teaching robot and robot system | |
| US11254008B2 (en) | Method and device of controlling robot system | |
| EP3619498B1 (en) | Triangulation scanner having flat geometry and projecting uncoded spots | |
| CN103383238B (zh) | 图像测量设备、图像测量方法和图像测量程序 | |
| US9645217B2 (en) | System and method for error correction for CNC machines | |
| CN107883831B (zh) | 测量系统和测量方法 | |
| US9199379B2 (en) | Robot system display device | |
| US20150377606A1 (en) | Projection system | |
| JP2005201824A (ja) | 計測装置 | |
| JP7102115B2 (ja) | 校正方法、校正装置、3次元測定機、3次元視覚測定装置、ロボットのエンドエフェクタ、プログラム、記録媒体 | |
| JP5618770B2 (ja) | ロボットの校正装置および校正方法 | |
| JP2004257927A (ja) | 3次元形状測定システムおよび3次元形状測定方法 | |
| JP6670974B1 (ja) | ロボット用の座標系アライメント方法及びアライメントシステム並びにアライメント装置 | |
| JP6736798B1 (ja) | 加工装置のためのワークの据え付け方法、ワーク据え付け支援システム、及び、ワーク据え付け支援プログラム | |
| KR101782317B1 (ko) | 3차원 스캐너를 이용한 로봇 캘리브레이션 장치 및 이를 이용한 로봇 캘리브레이션 방법 | |
| CN114770517B (zh) | 通过点云获取装置对机器人进行标定的方法以及标定系统 | |
| JP2008122228A (ja) | 位置合わせシステム及び位置合わせ方法 | |
| JP2007085912A (ja) | 位置測定方法及び位置測定装置並びに位置測定システム | |
| CN114770516A (zh) | 通过点云获取装置对机器人进行标定的方法以及标定系统 | |
| JPH07237158A (ja) | 位置・姿勢検出方法及びその装置並びにフレキシブル生産システム | |
| KR20160129652A (ko) | 카메라 모듈 조립장치 및 조립방법 | |
| Qiao | Advanced sensing development to support robot accuracy assessment and improvement | |
| JP2017007026A (ja) | 位置補正システム | |
| US20240193808A1 (en) | Imaging device for calculating three-dimensional position on the basis of image captured by visual sensor | |
| WO2023135764A1 (ja) | 3次元センサを備えるロボット装置およびロボット装置の制御方法 |