JP2008035308A - 電子カメラ及びレンズユニット - Google Patents
電子カメラ及びレンズユニット Download PDFInfo
- Publication number
- JP2008035308A JP2008035308A JP2006207496A JP2006207496A JP2008035308A JP 2008035308 A JP2008035308 A JP 2008035308A JP 2006207496 A JP2006207496 A JP 2006207496A JP 2006207496 A JP2006207496 A JP 2006207496A JP 2008035308 A JP2008035308 A JP 2008035308A
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- driving
- angle
- tilt
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/17—Bodies with reflectors arranged in beam forming the photographic image, e.g. for reducing dimensions of camera
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
- G03B2205/0023—Movement of one or more optical elements for control of motion blur by tilting or inclining one or more optical elements with respect to the optical axis
Abstract
【解決手段】S210又はS208で設定されたあおり量dだけ、撮像素子駆動機構により撮像素子を移動する(S211)。ユーザが半押ししていたレリーズ釦を全押しすると、S217の判断がYESとなる。したがって、S217からS218に進み、S213で設定された撮影条件が示す設定露出時間に従って、露出時間タイマーを設定し、タイマー計時を開始する(S233)。また、手ブレ補正撮影モードが設定されている否かを判断し(S219)、設定されている場合には、当該デジタルカメラの垂直方向及び水平方向のブレ量を検出する(S220)。そして、この検出したブレ量に応じて、撮像素子駆動機構により撮像素子をあおり位置を中心に上下、左右に駆動する(S221)。
【選択図】図10
Description
(第1の実施の形態)
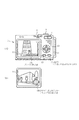
図1(A)は各実施の形態に共通するデジタルカメラ1の正面図、(B)は側面透視図、図2(A)は背面図、(B)は表示画面例を示す図である。このデジタルカメラ1の本体2には、その上面部に半押し機能を備えたレリーズ釦(シャッタースイッチ)3と電源スイッチ4とが配置されており、正面部にはグリップ部5、ストロボ6及び撮像レンズ部の受光窓7が配置されている。また、背面部には、モード切替スイッチ8、ズーム操作キー9、カーソルキー10、決定/OKキー11、手振れ量表示のオン・オフキーとして兼用されるDISPキー12、メニューキー13及び電子ファインダとしても機能するLCDからなる表示部14が配置されている。この表示部14には、モードに応じてブレ量の表示部14aと、あおり撮又はティルト(上下方向の回動)/スィング(左右方向の回動)量の表示部14bとが選択的に表示される。また、内部には垂直方向の角速度を検出する第1角速度センサ16と水平方向の角加速度を検出する第2角速度センサ17が配置されているとともに、回動式ミラー18、レンズ群19及び撮像素子20等が配置され、撮像素子20は撮像素子駆動機構21に固定されている。
d=[(h/L)−tan(θ/2)]×f
又は、
d=[f×(h/L)−(Y′/2)]
したがって、被写体の遠近感による構図や歪みを補正して、正面図のようにまっすぐに、また、被写体前面にピントが合うようにあおり量(ライズ/フォール量、シフト量)を自動設定して、「自動あおり補正撮影」する場合には、ビルの高さなど被写体の高さ(h)、及び、撮影距離(L)を、予め入力するか、三角測量法の原理で(ミラーやプリズムとPSD受光センサ等により)距離計測したり、超音波や赤外光などによる往復距離からアクティブ式に自動距離計測して、また、撮影時のズームレンズなど撮影レンズの焦点距離(f)情報、及び、それに相当する画角(θ)情報を読み込んで、算出された所要の移動量(あおり量)dを、自動あおり設定操作により設定して、撮像素子駆動機構によりその移動量(あおり量)dに相当する駆動動作を行えばよい。
d=[(h/L)−tan(θ/2)]×f
又は、
Y′/2f=tan(θ/2)より、d=[f×(h/L)−(Y′/2)]
発生力F=2πr・N・i・B
(ただし、r:コイル半径、N:巻き数、i:電流、B:磁束密度)
また、可動コイル214に流す電流の方向と大きさにより可動コイル214の移動方向と駆動加速度や変位量を制御でき、X、Y各方向の可動コイル214に連結されたX、Y各方向のムーバー215及びスライダ205、208を、各方向に平行移動させたり直線往復運動させたりできる。ステップモータに比べて応答性や駆動力に優れ、圧電アクチュエータ等と相違して、変位量が数mm〜数十mmと大きく取ることができる利点がある。
fr=(m2a/4πl2)√(Y/6ρ)等で求めることができる。
(例)φ=tan−1(f/L)]
傾斜角φ=sin−1(焦点距離f/撮像面中心と3面交会線(交点S)との距離J)、
又は
傾斜角φ=tan−1(焦点距離f/レンズ中心と3面交会線(交点S)との距離L)
傾斜角φ=sin−1(焦点距離f/撮像面中心と3面交会線(交点S)との距離J)、
すなわち、
傾斜角φ=tan−1(焦点距離f/レンズ中心と3面交会線(交点S)との距離L)
となるように、撮像面の傾斜角φを制御すればよい。
2 本体
3 レリーズ釦
14 表示部
16 第1角速度センサ
16 第2角速度センサ
17 第2角速度センサ
20 撮像素子
21 撮像素子駆動機構
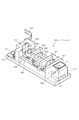
23 X方向ガイドレール
24 X方向駆動スクリュー
25 減速歯車
26 X方向駆動用モータ
27 駆動歯車
28 X方向スライダ
29 Y方向ガイドレール
30 Y方向駆動スクリュー
31 減速歯車
32 Y方向駆動用モータ
33 駆動歯車
34 Y方向スライダ
40 操作入力部
41 入力回路
42 主制御部
43 CPU
47 プログラムメモリ
48 データメモリ
201 撮像素子駆動機構
600 レンズユニット
614 回転式ミラー駆動機構
622 撮像素子傾斜回転駆動機構
Claims (11)
- 光学系により結像される被写体像を撮像する撮像面を有する撮像手段と、
この撮像手段を駆動して前記撮像面に沿った方向に変位させる駆動手段と、
カメラ本体のブレを検出するブレ検出手段と、
このブレ検出手段により検出される前記カメラ本体のブレに基づき、前記駆動手段を制御し前記撮像手段を変位させるブレ補正制御手段と、
設定モードに応じて前記駆動手段を制御し、前記撮像手段を変位させるとともに当該変位させた位置に定位させる撮影制御手段と、
を備えることを特徴とする電子カメラ。 - 外部からの光を光学系に反射させる反射手段と、
この反射手段を駆動して反射角度を変化させる第1の駆動手段と、
前記光学系により結像される被写体像を撮像する撮像面を有する撮像手段と、
この撮像手段を駆動して前記撮像面を角度変化させる第2の駆動手段と、
カメラ本体のブレを検出するブレ検出手段と、
このブレ検出手段により検出される前記カメラ本体のブレに基づき、前記第1の駆動手段を制御し前記反射手段を角度変化させるブレ補正制御手段と、
設定モードに応じて前記第2の駆動手段を制御し、前記撮像手段を角度変化させるとともに当該角度変化させた位置に定位させる撮影制御手段と、
を備えることを特徴とする電子カメラ。 - 前記撮影制御手段は、前記ブレ補正制御手段による撮像手段の動作範囲よりも広い動作範囲において、前記撮像手段を変位又は角度変化させることを特徴とする請求項1又は2記載の電子カメラ。
- 第1及び第2のモードを選択的に設定するモード設定手段と、
このモード設定手段により第1のモードが設定されている状態においては、前記ブレ補正制御手段を動作させ、前記第2のモードが設定されている状態においては、前記撮影制御手段を動作させる動作制御手段を更に備えることを特徴とする請求項1、2又は3記載の電子カメラ。 - 前記モード設定手段は、更に第3のモードを選択的に設定し、
前記動作制御手段は、前記第3のモードが設定されている状態においては、前記撮影制御手段を動作させた状態で前記ブレ補正制御手段を動作させることを特徴とする請求項4記載の電子カメラ。 - 前記撮影制御手段を動作させた状態で前記ブレ補正制御手段を動作させることを特徴とする請求項1、2又は3記載の電子カメラ。
- 前記撮影制御手段は、操作に応じた位置に前記撮像手段を変位させる手動変位手段と、所定の演算を実行し算出された位置に前記撮像手段を変位させる自動変位手段とを含むことを特徴とする請求項1記載の電子カメラ。
- 前記駆動手段は、前記撮像手段を前記撮像面に沿った上下方向に変位させる上下駆動手段と、前記撮像面に沿った左右方向に変位させる左右駆動手段とを備えることを特徴とする請求項1又は7記載の電子カメラ。
- 前記撮影制御手段は、操作に応じた角度に前記撮像手段を変化させる手動変角手段と、所定の演算を実行し算出された角度に前記撮像手段を変化させる自動変角手段とを含むことを特徴とする請求項2記載の電子カメラ。
- 前記第1及び第2の駆動手段は、前記反射手段又は撮像手段を水平軸を中心にして上下方向に角度変化させる上下駆動手段と、垂直軸を中心にして左右方向に角度変化させる左右駆動手段ととを備えることを特徴とする請求項1又は9記載の電子カメラ。
- 光学系と、
外部からの光を前記光学系に反射させる反射手段と、
この反射手段を駆動して反射角度を変化させる第1の駆動手段と、
前記光学系により結像される被写体像を撮像する撮像面を有する撮像手段と、
この撮像手段を駆動して前記撮像面を角度変化させる第2の駆動手段と、
を備えることを特徴とするレンズユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006207496A JP2008035308A (ja) | 2006-07-31 | 2006-07-31 | 電子カメラ及びレンズユニット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006207496A JP2008035308A (ja) | 2006-07-31 | 2006-07-31 | 電子カメラ及びレンズユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008035308A true JP2008035308A (ja) | 2008-02-14 |
| JP2008035308A5 JP2008035308A5 (ja) | 2009-09-10 |
Family
ID=39124250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006207496A Pending JP2008035308A (ja) | 2006-07-31 | 2006-07-31 | 電子カメラ及びレンズユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008035308A (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010117591A (ja) * | 2008-11-13 | 2010-05-27 | Nikon Corp | 撮像装置 |
| JP2010130633A (ja) * | 2008-12-01 | 2010-06-10 | Nikon Corp | 撮像装置 |
| US8743181B2 (en) | 2011-03-04 | 2014-06-03 | Olympus Corporation | Image pickup apparatus |
| JP2015070337A (ja) * | 2013-09-26 | 2015-04-13 | 株式会社エフネット | 撮像装置、撮像方法並びにプログラム |
| JP2015106144A (ja) * | 2013-12-03 | 2015-06-08 | 株式会社エフネット | 撮像装置 |
| JP2017098613A (ja) * | 2015-11-18 | 2017-06-01 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| JP2017122791A (ja) * | 2016-01-06 | 2017-07-13 | キヤノン株式会社 | 光学制御装置、光学機器および光学制御プログラム |
| JP2017220864A (ja) * | 2016-06-09 | 2017-12-14 | キヤノン株式会社 | 撮像装置および撮像プログラム |
| US10084963B2 (en) | 2015-11-30 | 2018-09-25 | Ricoh Imaging Company, Ltd. | Stage apparatus, image projector apparatus having stage apparatus, and imaging apparatus having stage apparatus |
| US10142546B2 (en) | 2016-03-16 | 2018-11-27 | Ricoh Imaging Company, Ltd. | Shake-correction device and shake-correction method for photographing apparatus |
| US10341567B2 (en) | 2016-03-16 | 2019-07-02 | Ricoh Imaging Company, Ltd. | Photographing apparatus |
| US10432862B2 (en) | 2015-11-30 | 2019-10-01 | Ricoh Imaging Company, Ltd. | Imaging apparatus, image projector apparatus, and stage apparatus |
| EP3606042A1 (en) * | 2018-07-31 | 2020-02-05 | Canon Kabushiki Kaisha | Control apparatus, imaging apparatus, and program |
| EP3644601A1 (en) * | 2018-10-26 | 2020-04-29 | Canon Kabushiki Kaisha | Imaging apparatus and monitoring system |
| CN113395447A (zh) * | 2021-05-31 | 2021-09-14 | 江西晶浩光学有限公司 | 防抖机构、摄像装置及电子设备 |
| JP2022026134A (ja) * | 2020-07-30 | 2022-02-10 | 富士フイルム株式会社 | 撮像装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63197926A (ja) * | 1987-02-12 | 1988-08-16 | Canon Inc | 光学装置 |
| JPH0115258Y2 (ja) * | 1981-11-11 | 1989-05-08 | ||
| JPH0389222A (ja) * | 1989-08-31 | 1991-04-15 | Minolta Camera Co Ltd | シフトカメラ |
| JP2001094841A (ja) * | 1999-09-21 | 2001-04-06 | Asahi Optical Co Ltd | アオリ撮影機能を有するデジタルスチルカメラ |
| JP2002277736A (ja) * | 2001-03-21 | 2002-09-25 | Olympus Optical Co Ltd | 撮像装置 |
| JP2002325199A (ja) * | 2001-04-25 | 2002-11-08 | Ricoh Co Ltd | 電子撮像装置 |
| JP2004219930A (ja) * | 2003-01-17 | 2004-08-05 | Minolta Co Ltd | 手振れ補正機能付きカメラ |
| JP2005352240A (ja) * | 2004-06-11 | 2005-12-22 | Olympus Corp | 光学系 |
-
2006
- 2006-07-31 JP JP2006207496A patent/JP2008035308A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0115258Y2 (ja) * | 1981-11-11 | 1989-05-08 | ||
| JPS63197926A (ja) * | 1987-02-12 | 1988-08-16 | Canon Inc | 光学装置 |
| JPH0389222A (ja) * | 1989-08-31 | 1991-04-15 | Minolta Camera Co Ltd | シフトカメラ |
| JP2001094841A (ja) * | 1999-09-21 | 2001-04-06 | Asahi Optical Co Ltd | アオリ撮影機能を有するデジタルスチルカメラ |
| JP2002277736A (ja) * | 2001-03-21 | 2002-09-25 | Olympus Optical Co Ltd | 撮像装置 |
| JP2002325199A (ja) * | 2001-04-25 | 2002-11-08 | Ricoh Co Ltd | 電子撮像装置 |
| JP2004219930A (ja) * | 2003-01-17 | 2004-08-05 | Minolta Co Ltd | 手振れ補正機能付きカメラ |
| JP2005352240A (ja) * | 2004-06-11 | 2005-12-22 | Olympus Corp | 光学系 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010117591A (ja) * | 2008-11-13 | 2010-05-27 | Nikon Corp | 撮像装置 |
| JP2010130633A (ja) * | 2008-12-01 | 2010-06-10 | Nikon Corp | 撮像装置 |
| US8743181B2 (en) | 2011-03-04 | 2014-06-03 | Olympus Corporation | Image pickup apparatus |
| JP2015070337A (ja) * | 2013-09-26 | 2015-04-13 | 株式会社エフネット | 撮像装置、撮像方法並びにプログラム |
| JP2015106144A (ja) * | 2013-12-03 | 2015-06-08 | 株式会社エフネット | 撮像装置 |
| JP2017098613A (ja) * | 2015-11-18 | 2017-06-01 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| US10084963B2 (en) | 2015-11-30 | 2018-09-25 | Ricoh Imaging Company, Ltd. | Stage apparatus, image projector apparatus having stage apparatus, and imaging apparatus having stage apparatus |
| US10432862B2 (en) | 2015-11-30 | 2019-10-01 | Ricoh Imaging Company, Ltd. | Imaging apparatus, image projector apparatus, and stage apparatus |
| JP2017122791A (ja) * | 2016-01-06 | 2017-07-13 | キヤノン株式会社 | 光学制御装置、光学機器および光学制御プログラム |
| US10345615B2 (en) | 2016-01-06 | 2019-07-09 | Canon Kabushiki Kaisha | Optical control apparatus, optical apparatus, and storage medium for storing optical control program |
| US10142546B2 (en) | 2016-03-16 | 2018-11-27 | Ricoh Imaging Company, Ltd. | Shake-correction device and shake-correction method for photographing apparatus |
| US10341567B2 (en) | 2016-03-16 | 2019-07-02 | Ricoh Imaging Company, Ltd. | Photographing apparatus |
| JP2017220864A (ja) * | 2016-06-09 | 2017-12-14 | キヤノン株式会社 | 撮像装置および撮像プログラム |
| US10911688B2 (en) | 2018-07-31 | 2021-02-02 | Canon Kabushiki Kaisha | Control apparatus, imaging apparatus, and storage medium |
| JP2020020901A (ja) * | 2018-07-31 | 2020-02-06 | キヤノン株式会社 | 制御装置、撮像装置、および、プログラム |
| EP3606042A1 (en) * | 2018-07-31 | 2020-02-05 | Canon Kabushiki Kaisha | Control apparatus, imaging apparatus, and program |
| JP7207888B2 (ja) | 2018-07-31 | 2023-01-18 | キヤノン株式会社 | 制御装置、撮像装置、制御装置の制御方法、および、プログラム |
| EP3644601A1 (en) * | 2018-10-26 | 2020-04-29 | Canon Kabushiki Kaisha | Imaging apparatus and monitoring system |
| CN111107263A (zh) * | 2018-10-26 | 2020-05-05 | 佳能株式会社 | 摄像设备和监视系统 |
| CN111107263B (zh) * | 2018-10-26 | 2022-04-19 | 佳能株式会社 | 摄像设备和监视系统 |
| US11399126B2 (en) | 2018-10-26 | 2022-07-26 | Canon Kabushiki Kaisha | Imaging apparatus and monitoring system for performing a focus control and an angle control |
| JP2022026134A (ja) * | 2020-07-30 | 2022-02-10 | 富士フイルム株式会社 | 撮像装置 |
| JP7266561B2 (ja) | 2020-07-30 | 2023-04-28 | 富士フイルム株式会社 | 撮像装置 |
| CN113395447A (zh) * | 2021-05-31 | 2021-09-14 | 江西晶浩光学有限公司 | 防抖机构、摄像装置及电子设备 |
| CN113395447B (zh) * | 2021-05-31 | 2023-04-04 | 江西晶浩光学有限公司 | 防抖机构、摄像装置及电子设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008035308A (ja) | 電子カメラ及びレンズユニット | |
| JP4622882B2 (ja) | デジタルカメラ | |
| JP4441565B2 (ja) | 撮像装置 | |
| US9769384B2 (en) | Imaging apparatus capable of detecting position of movable image pickup device at first resolving power and at second resolving power higher than first resolving power and, at which second resolving power, deviation amount is less than or equal to pixel shift amount | |
| JP4968885B2 (ja) | 撮像装置及びその制御方法、撮像システム、画像処理方法並びにプログラム | |
| JP2006171528A (ja) | 駆動機構、駆動装置、振れ補正ユニット及び撮像装置 | |
| JP2001022014A (ja) | ステレオカメラ | |
| JP4875971B2 (ja) | 撮影装置及びその調整方法 | |
| JP2008160175A (ja) | デジタルカメラ | |
| JP2009036986A (ja) | 撮影装置および撮影装置の制御方法 | |
| JP2010518443A (ja) | 手持ちカメラで安定画像を与える装置 | |
| JP2008003130A (ja) | 像振れ補正装置および撮影機器 | |
| JP2008054062A (ja) | 撮像装置 | |
| JP5203657B2 (ja) | 拡大表示機能付きカメラ | |
| JP2009244490A (ja) | カメラ、カメラ制御プログラム及びカメラ制御方法 | |
| JP2009036985A (ja) | 撮影装置および撮影装置の制御方法 | |
| JP2006091106A (ja) | 撮像装置及びその制御方法 | |
| JP5458521B2 (ja) | レンズ鏡筒、レンズ鏡筒の調整方法、光学装置、および光学装置の調整方法 | |
| JP2003091027A (ja) | 撮影装置 | |
| JP2012042589A (ja) | 像振れ補正機構、レンズ鏡筒、および撮像装置 | |
| JP2012159796A (ja) | 焦点調節装置および撮像装置 | |
| JP2006220834A (ja) | 撮像装置 | |
| JP5027029B2 (ja) | 拡大表示機能付きカメラおよびカメラの制御方法 | |
| JP2008107731A (ja) | レンズ装置、撮像装置、デジタルカメラ及び携帯電話機 | |
| JP2008070566A (ja) | カメラシステム、カメラ本体、交換レンズユニットおよび像ブレ補正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090724 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120110 |