JP2007326151A - 産業用ロボット - Google Patents
産業用ロボット Download PDFInfo
- Publication number
- JP2007326151A JP2007326151A JP2007188710A JP2007188710A JP2007326151A JP 2007326151 A JP2007326151 A JP 2007326151A JP 2007188710 A JP2007188710 A JP 2007188710A JP 2007188710 A JP2007188710 A JP 2007188710A JP 2007326151 A JP2007326151 A JP 2007326151A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- upper arm
- industrial robot
- tip
- welding torch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/005—Arms having a curved shape
Abstract
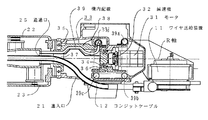
【解決手段】胴体6には、回転体8に取り付けるエンドエフェクタ9に動力または信号または材料を供給するケーブル等12を胴体6から引き出す通過口を胴体6の第1軸(R軸)の軸心と交わる位置に開口し、通過口から引き出したケーブル等12を、エンドエフェクタ9まで延設するものである。
【選択図】図1
Description
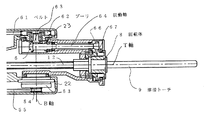
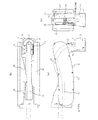
また、請求項2の発明は、基台と、前記基台に旋回自在に設けられた旋回ベースと、前記旋回ベースに揺動可能に設けられた下部アームと、前記下部アームの先端に揺動可能に設けられた上部アームと、前記上部アームの先端に設けられて前記上部アームの長さ方向の第1軸回りに回転する胴体と、前記胴体の先端に取り付けられて前記第1軸に直交する第2軸回りに揺動する揺動体と、前記揺動体の先端に取り付けられて第3軸回りに回転する回転体と、前記回転体に取り付けられた溶接トーチと、を備え、溶接ワイヤを送給するためのコンジットケーブルが、前記胴体に前記第1軸の軸心と同心となるように設けられた通過口から、前記胴体部分における前記第1軸周囲に設けられた第1の開放された空間部、前記遥動体部分における前記第3軸周囲に設けられた第2の開放された空間部を通って、前記溶接トーチへと接続された産業用ロボットにおいて、前記遥動体に、前記コンジットケーブルのケーブルサポートを備え、前記胴体は、前記第1軸に平行に延びる第1および第2の部材を備えて二股状をなし、前記遥動体は、前記第1および第2の部材に挟まれて揺動自在に支持され、前記第1の開放された空間部は、前記第1軸方向を長手方向として設けられており、前記第1の開放された空間部の先端部分と前記第2の開放された空間部の基端部分とが前記第2軸においてのみ交わることを特徴とする。
また、請求項3の発明は、前記溶接トーチに代えて、塗装用スプレーガンとし、前記コンジットケーブルに代えて、塗料用ホースとしたことを特徴とするものである。
また、請求項4の発明は、前記溶接トーチに代えて、シーリング用ノズルとし、前記コンジットケーブルに代えて、シーリング材供給ホースとしたことを特徴とするものである。
また、請求項5の発明は、前記溶接トーチに代えて、研磨工具とし、前記コンジットケーブルに代えて、前記研磨工具駆動用のエアホースまたは動力線としたことを特徴とするものである。
また、請求項6の発明は、前記溶接トーチに代えて、メカニカルハンドとし、前記コンジットケーブルに代えて、前記ハンド駆動用のエアホースまたは動力線としたことを特徴
Claims (6)
- 基台と、前記基台に旋回自在に設けられた旋回ベースと、前記旋回ベースに揺動可能に設けられた下部アームと、前記下部アームの先端に揺動可能に設けられた上部アームと、前記上部アームの先端に設けられて前記上部アームの長さ方向の第1軸回りに回転する胴体と、前記胴体の先端に取り付けられて前記第1軸に直交する第2軸回りに揺動する揺動体と、前記揺動体の先端に取り付けられて第3軸回りに回転する回転体と、前記回転体に取り付けられた溶接トーチと、を備え、溶接ワイヤを送給するためのコンジットケーブルが、前記胴体に前記第1軸の軸心と同心となるように設けられた通過口から、前記胴体部分における前記第1軸周囲に設けられた第1の開放された空間部、前記遥動体部分における前記第3軸周囲に設けられた第2の開放された空間部を通って、前記溶接トーチへと接続された産業用ロボットにおいて、
前記遥動体に、前記コンジットケーブルのケーブルサポートを備え、
前記胴体は、前記第1軸からオフセットして平行に延びる部材で少なくとも構成され、
前記揺動体は、前記部材によって、片持ちで支持され、
前記第1の開放された空間部は、前記第1軸方向を長手方向として設けられており、
前記第1の開放された空間部の先端部分と前記第2の開放された空間部の基端部分とが前記第2軸においてのみ交わることを特徴とする産業用ロボット。 - 基台と、前記基台に旋回自在に設けられた旋回ベースと、前記旋回ベースに揺動可能に設けられた下部アームと、前記下部アームの先端に揺動可能に設けられた上部アームと、前記上部アームの先端に設けられて前記上部アームの長さ方向の第1軸回りに回転する胴体と、前記胴体の先端に取り付けられて前記第1軸に直交する第2軸回りに揺動する揺動体と、前記揺動体の先端に取り付けられて第3軸回りに回転する回転体と、前記回転体に取り付けられた溶接トーチと、を備え、溶接ワイヤを送給するためのコンジットケーブルが、前記胴体に前記第1軸の軸心と同心となるように設けられた通過口から、前記胴体部分における前記第1軸周囲に設けられた第1の開放された空間部、前記遥動体部分における前記第3軸周囲に設けられた第2の開放された空間部を通って、前記溶接トーチへと接続された産業用ロボットにおいて、
前記遥動体に、前記コンジットケーブルのケーブルサポートを備え、
前記胴体は、前記第1軸に平行に延びる第1および第2の部材を備えて二股状をなし、
前記遥動体は、前記第1および第2の部材に挟まれて揺動自在に支持され、
前記第1の開放された空間部は、前記第1軸方向を長手方向として設けられており、
前記第1の開放された空間部の先端部分と前記第2の開放された空間部の基端部分とが前記第2軸においてのみ交わることを特徴とする産業用ロボット。 - 前記溶接トーチに代えて、塗装用スプレーガンとし、
前記コンジットケーブルに代えて、塗料用ホースとしたことを特徴とする請求項1乃至2いずれかに記載の産業用ロボット。 - 前記溶接トーチに代えて、シーリング用ノズルとし、
前記コンジットケーブルに代えて、シーリング材供給ホースとしたことを特徴とする請求項1乃至2いずれかに記載の産業用ロボット。 - 前記溶接トーチに代えて、研磨工具とし、
前記コンジットケーブルに代えて、前記研磨工具駆動用のエアホースまたは動力線としたことを特徴とする請求項1乃至2いずれかに記載の産業用ロボット。 - 前記溶接トーチに代えて、メカニカルハンドとし、
前記コンジットケーブルに代えて、前記ハンド駆動用のエアホースまたは動力線としたことを特徴とする請求項1乃至2いずれかに記載の産業用ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007188710A JP2007326151A (ja) | 2001-10-22 | 2007-07-19 | 産業用ロボット |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001324098 | 2001-10-22 | ||
| JP2007188710A JP2007326151A (ja) | 2001-10-22 | 2007-07-19 | 産業用ロボット |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002037386A Division JP4142304B2 (ja) | 2001-10-22 | 2002-02-14 | アーク溶接用ロボット |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010225443A Division JP5184602B2 (ja) | 2001-10-22 | 2010-10-05 | 多関節ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007326151A true JP2007326151A (ja) | 2007-12-20 |
| JP2007326151A5 JP2007326151A5 (ja) | 2008-06-19 |
Family
ID=38926999
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007188710A Pending JP2007326151A (ja) | 2001-10-22 | 2007-07-19 | 産業用ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007326151A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2199037A2 (en) | 2008-12-10 | 2010-06-23 | Kabushiki Kaisha Yaskawa Denki | Robot system and control method |
| CN104439627A (zh) * | 2013-09-19 | 2015-03-25 | 株式会社安川电机 | 机器人 |
| JP2015058459A (ja) * | 2013-09-19 | 2015-03-30 | 株式会社安川電機 | ロボット |
| JP2015085380A (ja) * | 2013-11-01 | 2015-05-07 | 株式会社安川電機 | ロボット |
| CN108746972A (zh) * | 2018-07-26 | 2018-11-06 | 宁波格罗勃自动化有限公司 | 自动化机器人点焊接设备 |
| CN110405737A (zh) * | 2019-08-08 | 2019-11-05 | 中新智擎科技有限公司 | 动力装置及具有此动力装置的机器人 |
| KR102551890B1 (ko) * | 2023-03-16 | 2023-07-05 | (주)수성하이테크 | 반도체 장비 구성에 대한 아크 스프레이 코팅을 위한 로봇 암 장치 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5973299A (ja) * | 1982-10-21 | 1984-04-25 | 株式会社神戸製鋼所 | 工業用ロボツト等の手首機構 |
| JPH02155572A (ja) * | 1988-12-08 | 1990-06-14 | Matsushita Electric Ind Co Ltd | 消耗電極アーク溶接用ロボット |
| JPH04319071A (ja) * | 1991-04-15 | 1992-11-10 | Matsushita Electric Ind Co Ltd | アーク溶接ロボット |
| JPH05131388A (ja) * | 1991-11-07 | 1993-05-28 | Hitachi Ltd | 工業用ロボツトの手首装置 |
| JPH0724777A (ja) * | 1993-07-07 | 1995-01-27 | Mishima Kosan Co Ltd | 配管・配線を備えるロボットアーム構造 |
| JPH11123688A (ja) * | 1997-10-24 | 1999-05-11 | Nachi Fujikoshi Corp | 産業用ロボットのアーム構造 |
-
2007
- 2007-07-19 JP JP2007188710A patent/JP2007326151A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5973299A (ja) * | 1982-10-21 | 1984-04-25 | 株式会社神戸製鋼所 | 工業用ロボツト等の手首機構 |
| JPH02155572A (ja) * | 1988-12-08 | 1990-06-14 | Matsushita Electric Ind Co Ltd | 消耗電極アーク溶接用ロボット |
| JPH04319071A (ja) * | 1991-04-15 | 1992-11-10 | Matsushita Electric Ind Co Ltd | アーク溶接ロボット |
| JPH05131388A (ja) * | 1991-11-07 | 1993-05-28 | Hitachi Ltd | 工業用ロボツトの手首装置 |
| JPH0724777A (ja) * | 1993-07-07 | 1995-01-27 | Mishima Kosan Co Ltd | 配管・配線を備えるロボットアーム構造 |
| JPH11123688A (ja) * | 1997-10-24 | 1999-05-11 | Nachi Fujikoshi Corp | 産業用ロボットのアーム構造 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2199037A2 (en) | 2008-12-10 | 2010-06-23 | Kabushiki Kaisha Yaskawa Denki | Robot system and control method |
| CN104439627A (zh) * | 2013-09-19 | 2015-03-25 | 株式会社安川电机 | 机器人 |
| JP2015058459A (ja) * | 2013-09-19 | 2015-03-30 | 株式会社安川電機 | ロボット |
| US9643277B2 (en) | 2013-09-19 | 2017-05-09 | Kabushiki Kaisha Yaskawa Denki | Robot |
| US10596664B2 (en) | 2013-09-19 | 2020-03-24 | Kabushiki Kaisha Yaskawa Denki | Robot |
| JP2015085380A (ja) * | 2013-11-01 | 2015-05-07 | 株式会社安川電機 | ロボット |
| CN108746972A (zh) * | 2018-07-26 | 2018-11-06 | 宁波格罗勃自动化有限公司 | 自动化机器人点焊接设备 |
| CN108746972B (zh) * | 2018-07-26 | 2024-03-15 | 宁波格罗勃自动化有限公司 | 自动化机器人点焊接设备 |
| CN110405737A (zh) * | 2019-08-08 | 2019-11-05 | 中新智擎科技有限公司 | 动力装置及具有此动力装置的机器人 |
| KR102551890B1 (ko) * | 2023-03-16 | 2023-07-05 | (주)수성하이테크 | 반도체 장비 구성에 대한 아크 스프레이 코팅을 위한 로봇 암 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4142304B2 (ja) | アーク溶接用ロボット | |
| JP5184602B2 (ja) | 多関節ロボット | |
| US8863606B2 (en) | Robot wrist structure and robot | |
| EP1625920B1 (en) | Managing structure for umbilical member of industrial robot | |
| JP2007326151A (ja) | 産業用ロボット | |
| JP2008238320A (ja) | 作業ツールを備えたロボット | |
| EP1892064B1 (en) | Drive mechanism for industrial robot arm | |
| JP3944208B2 (ja) | ロボットの線条体案内装置及び線条体案内装置を備えたロボット | |
| US20160023360A1 (en) | Robot | |
| WO2003037577A1 (fr) | Robot industriel | |
| JP2012056082A (ja) | 多関節マニピュレータおよびロボットシステム | |
| JP5833836B2 (ja) | 多関節型産業用ロボット | |
| US20160023359A1 (en) | Robot joint mechanism and robot | |
| JP2005096073A (ja) | 産業用ロボット | |
| US20160023358A1 (en) | Robot | |
| JP2004358649A (ja) | 産業用ロボット | |
| US5279177A (en) | Wrist mechanism of industrial robot | |
| JPH05318378A (ja) | 産業用ロボットの配線、配管処理装置 | |
| JPH10175189A (ja) | 垂直多関節型ロボットの手首構造 | |
| JP4029306B2 (ja) | 産業用ロボット | |
| JPH02303778A (ja) | ロボットのアーム駆動機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080507 |
|
| A977 | Report on retrieval |
Effective date: 20091113 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100806 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Effective date: 20101005 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101201 |
|
| A521 | Written amendment |
Effective date: 20110128 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110228 |