JP2007267908A - 電動リクライニングシート - Google Patents
電動リクライニングシート Download PDFInfo
- Publication number
- JP2007267908A JP2007267908A JP2006096450A JP2006096450A JP2007267908A JP 2007267908 A JP2007267908 A JP 2007267908A JP 2006096450 A JP2006096450 A JP 2006096450A JP 2006096450 A JP2006096450 A JP 2006096450A JP 2007267908 A JP2007267908 A JP 2007267908A
- Authority
- JP
- Japan
- Prior art keywords
- reclining
- seat
- seat back
- electric
- slide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
Abstract
【解決手段】 シートクッション11と、シートクッションに対してリクライニング動作可能であって且つスライド動作可能な状態で設置されたシートバック12と、シートバックにリクライニング動作を行わせるリクライニング駆動手段と、シートバックにスライド動作を行わせるスライド駆動手段と、リクライニング駆動手段とスライド駆動手段を制御する制御手段とを具備し、制御手段は、使用者をシートクッションに着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの情報に基づいて、使用者に適したリクライニング角度・スライド位置パターンに修正する修正手段を備えている。
【選択図】 図1
Description
そのようなリクライニング装置を備えた電動車椅子を開示するものとして、例えば、特許文献1がある。
そこで、シートバックをシートクッションに対して傾動駆動するリクライニング動作時にシートバックをスライド動作させることが考えられている。リクライニング角度に応じてシートバックがスライド動作する場合、使用者の体形によって、リクライニング角度に対するシートバック位置の適正値が存在する。仮に、リクライニング角度に対するシートバック位置が適正でない場合には、使用者の背中とシートバックとの間にズレが発生し、そのようなズレは電動車椅子を使用する使用者、取り分け、障害者にとっては「床ずれ」の原因となってしまうものである。
又、請求項2による電動リクライニングシートは、請求項1記載の電動リクライニングシートにおいて、上記修正手段は、使用者を上記シートクッションに着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの上記スライド駆動手段の電流値に基づいて修正するものであることを特徴とするものである。
又、請求項3による電動リクライニングシートは、請求項2記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを最大倒れ位置まで倒していったときの電流値情報とシートバックを最大起こし位置まで起こしていったときの電流値情報に基づいて、修正の必要の有無を判別するものであることを特徴とするものである。
又、請求項4による電動リクライニングシートは、請求項3記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを最大倒れ位置まで倒していったときの検出電流値が予め設定された設定範囲を超えているか否かを判別し、且つ、シートバックを最大起こし位置まで起こしていったときの検出電流値が予め設定された設定範囲を超えるか否かを判別し、それらの判別結果に基づいて適宜修正を施すものであることを特徴とするものである。
又、請求項5による電動リクライニングシートは、請求項4記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを倒し方向に倒したときの電流値が予め設定された設定値を越えていて且つ起こし方向に起こしたときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ上側に移動させるプラス修正を施し、シートバックを起こし方向に起こしたときの電流値が予め設定された設定値を越えていて且つ倒し方向に倒したときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ下側に移動させるマイナス修正を施すものであることを特徴とするものである。
又、請求項6による電動リクライニングシートは、請求項5記載の電動リクライニングシートにおいて、上記修正手段は、修正処理を一回又は複数回繰り返すことにより使用者にとって最適なリクライニング角度・スライド位置パターンであると判別した場合は自動的に修正処理を完了するものであることを特徴とするものである。
又、請求項7による電動リクライニングシートは、請求項6記載の電動リクライニングシートにおいて、上記修正手段は最大起こし位置から最大倒れ位置までの角度を所定角度ずつ分割し、夫々の分割された角度範囲内で順次判別・修正を施すものであることを特徴とするものである。
又、請求項8による電動リクライニングシートは、電動車椅子に搭載されることを特徴とするものである。
又、請求項2による電動リクライニングシートは、請求項1記載の電動リクライニングシートにおいて、上記修正手段は、使用者を上記シートクッションに着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの上記スライド駆動手段の電流値に基づいて修正するものであり、そのような電流値に基づいて修正・設定することにより、より最適なリクライニング角度・スライド位置パターンの修正・設定が可能になる。
又、請求項3による電動リクライニングシートは、請求項2記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを最大倒れ位置まで倒していったときの電流値情報とシートバックを最大起こし位置まで起こしていったときの電流値情報に基づいて、修正の必要の有無を判別するものとして構成されているので、より最適なリクライニング角度・スライド位置パターンの修正・設定が可能になる。
又、請求項4による電動リクライニングシートは、請求項3記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを最大倒れ位置まで倒していったときの検出電流値が予め設定された設定範囲を超えているか否かを判別し、且つ、シートバックを最大起こし位置まで起こしていったときの検出電流値が予め設定された設定範囲を超えるか否かを判別し、それらの判別結果に基づいて適宜修正を施すものとして構成されているので、より最適なリクライニング角度・スライド位置パターンの修正・設定が可能になる。
又、請求項5による電動リクライニングシートは、請求項4記載の電動リクライニングシートにおいて、上記修正手段は、シートバックを倒し方向に倒したときの電流値が予め設定された設定値を越えていて且つ起こし方向に起こしたときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ上側に移動させるプラス修正を施し、シートバックを起こし方向に起こしたときの電流値が予め設定された設定値を越えていて且つ倒し方向に倒したときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ下側に移動させるマイナス修正を施すものであるものとして構成されているので、より最適なリクライニング角度・スライド位置パターンの修正・設定が可能になる。
又、請求項6による電動リクライニングシートは、請求項5記載の電動リクライニングシートにおいて、上記修正手段は、修正処理を一回又は複数回繰り返すことにより使用者にとって最適なリクライニング角度・スライド位置パターンであると判別した場合は自動的に修正処理を完了するものである構成となっているので、最適なリクライニング角度・スライド位置パターンを得られるまで自動で処理することが可能になる。
又、請求項7による電動リクライニングシートは、請求項6記載の電動リクライニングシートにおいて、上記修正手段は最大起こし位置から最大倒れ位置までの角度を所定角度ずつ分割し、夫々の分割された角度範囲内で順次判別・修正を施すものとして構成されているので、より最適なリクライニング角度・スライド位置パターンの修正・設定が可能になる。
又、請求項8による電動リクライニングシートは、例えば、身体障害者や高齢者が使用する電動車椅子に搭載されるものであるので極めて有用である。
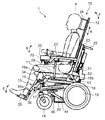
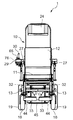
まず、図1乃至図5は本発明の一実施の形態に係る電動リクライニングシートが適用された電動車椅子の概略構成を示す図であり、図1は右側面図であり、図2は正面図であり、図3は背面図であり、図4は平面図であり、図5は駆動系を示す部分拡大図である。以降、電動車椅子の前後方向及び左右方向は電動車椅子の使用者(運転者)を基準にして呼称する。
尚、右側のアームレスト27ではなく左側のアームレスト27にコントローラ29を設けることも可能である。コントローラ29は、後述する後輪駆動用の電動モータを駆動制御して電動車椅子1の走行、右或いは左旋回動作等を行わせるための走行操作レバー30や、運転その他電動車椅子1を操作するために必要なスイッチ類31等を備えている。スイッチ類31には、例えば、電動車椅子1の走行を可能にしたり、リクライニング動作を可能にしたり、電動車椅子1の電源をOFF状態にしたりすることができる切換スイッチ等が含まれる。
尚、EEPROM81はマイクロコンピュータ75の外部に設けるようにしてもよく、マイクロコンピュータ75からの指令により、読み込み及び書き込みの動作をしてもよい。
上記データ修正部87及び前記ユーザI/F装置76の構成については後述する。
図10は自動フィッティング処理を示すフローチャートであり、まず、ステップS1において、ユーザI/F装置76から自動フィッティング開始指令が出される。次に、ステップS2に移行して、シートバック12を最大起こし(80度)位置へ動作させる。次に、ステップS3に移行して、図17で示したリクライニング角度・シートバック位置パラメータの内、パラメータ(a)を標準的なパラメータとして設定する。次に、ステップS4に移行して、使用者Pにシートクッション11上に着座してもらう。
そして、次の角度範囲、すなわち、20°〜40°の範囲での位置データの修正処理に移行する。
因みに、図16に示す例は、図11のフローチャートにおけるステップS24に移行するケースに該当する。
このような処理が全角度範囲について実行され、その結果、修正された新たなリクライニング角度・シートバック位置パラメータが設定されることになる。そして、この修正された新たなリクライニング角度・シートバック位置パラメータに基づいて同様の処理が、ユーザI/F装置76からの合格指令が出力されるまで繰り返し実行されることになる。
まず、使用者Pにとって最適なリクライニング角度・スライド位置パターンを修正・設定して動作させることが可能となり、そのような修正・設定作業を全て自動化させることができる。これは、背中の感覚が弱くてずれを感じることができないような使用者P或いは感じた感覚を正確に伝達することができないような使用者Pにとって好都合であり、そのような使用者Pにとっても最適なリクライニング角度・スライド位置パターンを自動的に設定して動作させることが可能となるものである。
又、本実施の形態の場合には、使用者Pをシートクッション11上に着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときのスライド駆動用モータ62の電流値に基づいて修正するものであり、よって、最適なリクライニング角度・スライド位置パターンの修正・設定を高い精度で行うことが可能となる。
又、一回の修正によって移動させる距離についてはこれを予め所定量(この実施の形態の場合には10mm)に設定し、後は、修正作業を適宜繰り返すことにより、所望のリクライニング角度・スライド位置パターンを得る構成になっているので、例えば、移動量をその都度算出するような構成に比べて処理が容易になる。
又、本実施の形態の場合には、最大起こし位置から最大倒れ位置までの角度を所定角度ずつ分割し、夫々の分割された角度範囲内で順次判別・修正を施すようにしているので、既に述べた効果をより確実なものとすることができ、使用者Pにとって最適なリクライニング角度・スライド位置パターンを得ることができる。
例えば、前記一実施の形態の場合には、電動リクライニングシートを電動車椅子に適用した例を挙げて説明したが、それに限定されるものではなく、様々な機器に適用可能である。
又、前記一実施の形態の場合には、0〜80°の範囲を20°単位で分割して修正するようにしているが、それに限定されるものではない。
又、一回の修正量を10mmと設定しているがそれに限定されるものではない。
又、修正量は検出電流と設定電流との差に基づいてその都度算出することも考えられる。
又、前記一実施の形態の場合には、自動的に合格指令が出力されて終了するように構成したが、それを使用者Pが判断して決定するようにしてもよい。
又、前記一実施の形態の場合には、標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの情報として、スライドモータの電流値を検出して使用するように構成しているが、それに限定されるものではなく、その他の情報を使用することも考えられる。
10 電動リクライニングシート
11 シートクッション
12 シートバック
52 リクライニング機構
61 リクライニング駆動用装置
62 スライド駆動用モータ
63 傾動角度検出センサ
64 スライド量検出センサ
65 リクライニング駆動スイッチ
66 制御ユニット
67 リクライニング駆動用モータ
71 電流検出センサ
73 A/D変換器
75 マイクロコンピュータ
76 ユーザI/F装置
77 CPU
79 RAM
81 EEPROM
83 スライド駆動用モータ制御部
85 リクライニング駆動用モータ制御部
87 データ修正部
P 使用者
Claims (8)
- シートクッションと、上記シートクッションに対してリクライニング動作可能であって且つスライド動作可能な状態で設置されたシートバックと、上記シートバックにリクライニング動作を行わせるリクライニング駆動手段と、上記シートバックにスライド動作を行わせるスライド駆動手段と、上記リクライニング駆動手段とスライド駆動手段を制御する制御手段と、を具備し、
上記制御手段は、使用者を上記シートクッションに着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの情報に基づいて、その使用者に適したリクライニング角度・スライド位置パターンに修正する修正手段を備えていることを特徴とする電動リクライニングシート。 - 請求項1記載の電動リクライニングシートにおいて、
上記修正手段は、使用者を上記シートクッションに着座させて標準的なリクライニング角度・スライド位置パターンに沿って動作させたときの上記スライド駆動手段の電流値に基づいて修正するものであることを特徴とする電動リクライニングシート。 - 請求項2記載の電動リクライニングシートにおいて、
上記修正手段は、シートバックを最大倒れ位置まで倒していったときの電流値情報とシートバックを最大起こし位置まで起こしていったときの電流値情報に基づいて、修正の必要の有無を判別するものであることを特徴とする電動リクライニングシート。 - 請求項3記載の電動リクライニングシートにおいて、
上記修正手段は、シートバックを最大倒れ位置まで倒していったときの検出電流値が予め設定された設定範囲を超えているか否かを判別し、且つ、シートバックを最大起こし位置まで起こしていったときの検出電流値が予め設定された設定範囲を超えるか否かを判別し、それらの判別結果に基づいて適宜修正を施すものであることを特徴とする電動リクライニングシート。 - 請求項4記載の電動リクライニングシートにおいて、
上記修正手段は、シートバックを倒し方向に倒したときの電流値が予め設定された設定値を越えていて且つ起こし方向に起こしたときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ上側に移動させるプラス修正を施し、シートバックを起こし方向に起こしたときの電流値が予め設定された設定値を越えていて且つ倒し方向に倒したときの電流値が予め設定された設定値を下回るときに上記シートバックの位置を所定量だけ下側に移動させるマイナス修正を施すものであることを特徴とする電動リクライニングシート。 - 請求項5記載の電動リクライニングシートにおいて、
上記修正手段は、修正処理を一回又は複数回繰り返すことにより使用者にとって最適なリクライニング角度・スライド位置パターンであると判別した場合は自動的に修正処理を完了するものであることを特徴とする電動リクライニングシート。 - 請求項6記載の電動リクライニングシートにおいて、
上記修正手段は最大起こし位置から最大倒れ位置までの角度を所定角度ずつ分割し、夫々の分割された角度範囲内で順次判別・修正を施すものであることを特徴とする電動リクライニングシート。 - 電動車椅子に搭載されることを特徴とする請求項1〜請求項6の何れかに記載の電動リクライニングシート。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006096450A JP4974564B2 (ja) | 2006-03-31 | 2006-03-31 | 電動リクライニングシート |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006096450A JP4974564B2 (ja) | 2006-03-31 | 2006-03-31 | 電動リクライニングシート |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007267908A true JP2007267908A (ja) | 2007-10-18 |
| JP4974564B2 JP4974564B2 (ja) | 2012-07-11 |
Family
ID=38671323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006096450A Expired - Fee Related JP4974564B2 (ja) | 2006-03-31 | 2006-03-31 | 電動リクライニングシート |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4974564B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104825284A (zh) * | 2015-05-12 | 2015-08-12 | 上海理工大学 | 具有翻身功能的站立平躺式轮椅 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001061922A (ja) * | 1999-08-26 | 2001-03-13 | Matsushita Electric Works Ltd | マッサージ機 |
| JP2002035070A (ja) * | 2000-07-26 | 2002-02-05 | Matsushita Electric Works Ltd | マッサージ機 |
| JP2003126198A (ja) * | 2001-10-25 | 2003-05-07 | Toshiba Tec Corp | マッサージ機のマッサージ条件決定方法 |
| JP2003275265A (ja) * | 2002-03-22 | 2003-09-30 | Family Kk | マッサージ機 |
| JP2004081474A (ja) * | 2002-08-27 | 2004-03-18 | Ryuji Yamazaki | リクライニング構造 |
| JP2004275486A (ja) * | 2003-03-17 | 2004-10-07 | Kanto Auto Works Ltd | 電動車椅子用パワーシリンダの位置センサ及びそのパワーシリンダを用いた電動車椅子 |
| JP2005013548A (ja) * | 2003-06-27 | 2005-01-20 | Fuji Iryoki:Kk | 施療機 |
| JP2005124798A (ja) * | 2003-10-23 | 2005-05-19 | Sml Ltd | 椅子 |
| JP2005204704A (ja) * | 2004-01-20 | 2005-08-04 | Amano:Kk | 特殊入浴システムならびに車椅子兼ストレッチャー |
| JP2006061591A (ja) * | 2004-08-30 | 2006-03-09 | Omron Healthcare Co Ltd | マッサージ機 |
-
2006
- 2006-03-31 JP JP2006096450A patent/JP4974564B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001061922A (ja) * | 1999-08-26 | 2001-03-13 | Matsushita Electric Works Ltd | マッサージ機 |
| JP2002035070A (ja) * | 2000-07-26 | 2002-02-05 | Matsushita Electric Works Ltd | マッサージ機 |
| JP2003126198A (ja) * | 2001-10-25 | 2003-05-07 | Toshiba Tec Corp | マッサージ機のマッサージ条件決定方法 |
| JP2003275265A (ja) * | 2002-03-22 | 2003-09-30 | Family Kk | マッサージ機 |
| JP2004081474A (ja) * | 2002-08-27 | 2004-03-18 | Ryuji Yamazaki | リクライニング構造 |
| JP2004275486A (ja) * | 2003-03-17 | 2004-10-07 | Kanto Auto Works Ltd | 電動車椅子用パワーシリンダの位置センサ及びそのパワーシリンダを用いた電動車椅子 |
| JP2005013548A (ja) * | 2003-06-27 | 2005-01-20 | Fuji Iryoki:Kk | 施療機 |
| JP2005124798A (ja) * | 2003-10-23 | 2005-05-19 | Sml Ltd | 椅子 |
| JP2005204704A (ja) * | 2004-01-20 | 2005-08-04 | Amano:Kk | 特殊入浴システムならびに車椅子兼ストレッチャー |
| JP2006061591A (ja) * | 2004-08-30 | 2006-03-09 | Omron Healthcare Co Ltd | マッサージ機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104825284A (zh) * | 2015-05-12 | 2015-08-12 | 上海理工大学 | 具有翻身功能的站立平躺式轮椅 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4974564B2 (ja) | 2012-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112693370B (zh) | 车辆的座椅控制系统 | |
| JPH06125829A (ja) | ベッド | |
| JP4929713B2 (ja) | リクライニングシート | |
| JP4403835B2 (ja) | 椅子及び車椅子 | |
| CN113401023A (zh) | 一种车内座椅自动拼接成床系统、控制方法及汽车 | |
| KR20120100155A (ko) | 시트와 등받이가 움직이는 휠체어 | |
| JP2008105607A (ja) | シートポジション制御装置 | |
| JP4923605B2 (ja) | 電動車椅子 | |
| JP4974564B2 (ja) | 電動リクライニングシート | |
| JP5258172B2 (ja) | 電動リクライニングシート | |
| JP2010069283A (ja) | 移乗装置及びその移乗方法 | |
| JP2006232088A (ja) | 車両の運転姿勢調整装置および運転姿勢調整方法 | |
| JP2010253192A (ja) | 統合介護システム | |
| JP4013911B2 (ja) | 自動車の運転姿勢調整装置 | |
| JP2022110553A (ja) | 車両用シート | |
| JP4407321B2 (ja) | 車椅子 | |
| JP4187204B2 (ja) | 姿勢制御式電動車椅子 | |
| JP2021531203A (ja) | 車両シート用能動的クッション形状調節 | |
| JP2009083652A (ja) | 軽車両 | |
| JP2007167146A (ja) | 電動リクライニングシート | |
| JP2009213503A (ja) | 便器からの立ち上がり補助装置 | |
| JP2015139566A (ja) | 介護支援装置 | |
| CN115534768A (zh) | 一种汽车座椅智能调节系统、方法及商用车 | |
| JP2010131225A (ja) | 移乗支援装置 | |
| JP2008254593A (ja) | 車両用シート |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120410 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4974564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |