JP2007222613A - 真空掃除機の制御方法 - Google Patents
真空掃除機の制御方法 Download PDFInfo
- Publication number
- JP2007222613A JP2007222613A JP2007019770A JP2007019770A JP2007222613A JP 2007222613 A JP2007222613 A JP 2007222613A JP 2007019770 A JP2007019770 A JP 2007019770A JP 2007019770 A JP2007019770 A JP 2007019770A JP 2007222613 A JP2007222613 A JP 2007222613A
- Authority
- JP
- Japan
- Prior art keywords
- dust
- vacuum cleaner
- controlling
- pressure member
- cleaner according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/106—Dust removal
- A47L9/108—Dust compression means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Filters For Electric Vacuum Cleaners (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
【解決手段】塵埃が捕集される集塵装置が備えられる真空掃除機において、吸入モータが作動して、集塵装置の内部に塵埃が捕集されるステップと、少なくとも1つの移動可能な加圧部材によって、集塵装置の内部に捕集される塵埃の体積を減少させる圧縮ステップと、が含まれる。好ましくは、吸入モータの作動によって吸入された空気中の塵埃が捕集される集塵装置が備えられる真空掃除機において、吸入モータの作動が停止するステップと、集塵装置の内部に備えられた複数の加圧部材のうち、少なくとも1つの加圧部材が異なる加圧部材側に移動されて停止するステップと、が含まれる。
【選択図】図1
Description
かかる真空掃除機は、大きく吸入口であるノズル部が本体と別途に備えられて、連結管によって連結されるキャニスタ方式と、ノズル部が本体と一体に形成されるアップライト方式に区別することができる。
詳細には、サイクロン集塵装置は、集塵体と、集塵体に空気が吸入されるようにする吸入口と、集塵体に吸入される空気の中から塵埃を分離させるサイクロン部と、サイクロン部から分離された塵埃が捕集される塵埃捕集部と、サイクロン部から塵埃が分離された空気が排出される排出口とが備えられる。
そして、真空掃除機の作動が停止すると、集塵体の底面にそのまま沈んで、密度の低い状態で捕集される。
また、本発明の他の目的は、集塵装置の内部に捕集された塵埃の圧縮が自動に行われる真空掃除機の制御方法を提案することにある。
また、本発明のさらに他の目的は、掃除機の作動停止時にも塵埃の圧縮作用が行われ続けて、塵埃の排出を容易にする真空掃除機の制御方法を提案することにある。
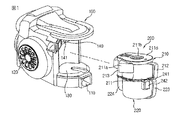
図1は、本発明に係る真空掃除機から集塵装置が分離された状態の斜視図である。
図1に示すように、本発明に係る真空掃除機は、内部に吸入力を発生させる吸入モータ(図示せず)が備えられる掃除機本体100と、吸入された空気中に含まれた塵埃を分離して捕集する集塵装置200とが備えられて構成される。
そして、図示していないが、塵埃が含まれた空気を吸入する吸入ノズルと、吸入ノズルを掃除機の本体100に連結させる連結管がさらに備えられて構成される。
詳細には、掃除機本体100の前面下段部には、吸入ノズルから吸入された塵埃が含まれた空気が吸入される本体吸入部110が形成される。
そして、掃除機本体100の一側には、塵埃が分離された空気が本体の外部に排出される本体排出部120が形成される。
ここで、塵埃分離部210は、吸入される空気に含まれた塵埃をサイクロン原理、すなわち空気と塵埃との遠心力差で塵埃を分離するサイクロン部211が備えられる。したがって、サイクロン部211により分離される塵埃は、集塵容器220の内部に捕集される。
一方、集塵装置200は、その内部に捕集される塵埃の集塵容量が最大になるように構成されることが好ましい。このために、集塵装置200には、集塵容器220の内部に捕集される塵埃の体積を減少させるための構成が追加されることが好ましい。
図2は、真空掃除機に適用される集塵装置装着部と集塵装置とを分離して示した斜視図であり、図3は、集塵装置の断面斜視図であり、図4は、図3のA部分の拡大図であり、図5は、集塵装置に捕集された塵埃の圧縮のために提供される駆動装置と集塵装置との結合関係を示す斜視図である。
そして、掃除機本体100には、集塵装置200が装着されるための集塵装置装着部130が提供される。
ここで、一対の加圧部材310、320は、互いの相互作用により塵埃を圧縮して塵埃の体積を減少させ、これにより、集塵容器220の内部に捕集される塵埃の密度を増加させることによって、集塵容器220の最大集塵容量が増加するようにする。
本実施の形態において、一対の加圧部材310、320のうち、少なくとも何れか1つは、集塵容器220の内部に移動可能に備えられて、一対の加圧部材310、320間で塵埃の圧縮作用を行う。
したがって、第1加圧部材310は、回転部材となり、第2加圧部材320は、固定部材となる。
詳細には、第2加圧部材320は、塵埃捕集部221の内周面と第1加圧部材310の回転中心をなす回転軸312の軸線間に提供されることが好ましい。
もちろん、第2加圧部材320の一端のみが塵埃捕集部221の内周面に一体に形成されるか、他端のみが固定軸322に一体に形成されることができる。言い換えれば、第2加圧部材320は、塵埃捕集部221の内周面と固定軸322のうち、少なくとも何れか一側に固定される。
その理由は、第1加圧部材310により押し寄せる塵埃が、第2加圧部材320の側方に形成された隙間を介して漏れることを最小化するためである。
以下では、図4及び図5を参照して、集塵装置200と駆動装置400との結合関係について詳細に説明する。
詳細には、動力伝達部410、420は、第1加圧部材310の回転軸312に結合される従動ギア410と、従動ギア410に動力を伝達する駆動ギア420が含まれる。
したがって、駆動モータ430が回転されると、駆動モータ430と結合された駆動ギア420が回転され、駆動ギア420によって駆動モータ430の回転力が従動ギア410に伝達されて、従動ギア410が回転するようになり、最終的に従動ギア410の回転によって第1加圧部材310が回転するようになる。
そして、駆動ギア420の外周面の一部は、集塵装置装着部130の底から外部に露出する。
そして、回転軸312は、固定軸322の上段により支持される段差部312cが形成され、段差部312cを基準に第1加圧部材310が結合される上部軸312aと従動ギア410が結合される下部軸312bとに分けられる。
したがって、上記のように、回転軸312に従動ギア410が結合されると、従動ギア410が集塵容器220の外部に露出する。
このように従動ギア410が集塵容器220の外部に露出するに伴い、集塵装置装着部130に集塵装置200が装着されると、従動ギア410が駆動ギア420と噛み合うようになる。
このように、駆動モータ430の正逆回転を可能にするため、駆動モータ430は、シンクロナスモータ(synchronous motor)が用いられることができる。
このとき、モータに加えられる力は、第1加圧部材310が塵埃を加圧することによって発生する抵抗力(トルク)であって、抵抗力が設定された値に到達すると、モータの回転方向が変換されるように構成される。
シンクロナスモータは、モータ技術分野において周知のものであるため、これに対する詳細な説明は省略する。但し、シンクロナスモータによって駆動モータ430の正逆回転を可能にしたことが、本発明の技術的思想の一つである。
ここで、第1加圧部材310が回転できない頂点とは、抵抗力が設定値に到達した場合を意味する。
このとき、駆動モータ430に印加される電源の遮断時点は、抵抗力が設定値に到達した場合であるから、駆動モータ430が再び駆動されると、駆動モータ430の回転方向は、電源遮断前と反対方向になるであろう。
このとき、第1加圧部材310は、第2加圧部材320と略180度の角度をなすように離隔して構成されることができる。ここで、第1加圧部材310の圧縮された塵埃からの離隔は、駆動モータ430によりなされることはもちろんである。
また、集塵容器220の内部に所定量以上の塵埃が集塵されると、集塵性能の低下とモータの過負荷などを防止するために、集塵容器220の除塵時期をユーザに表示することが好ましい。
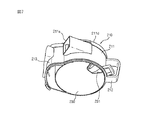
図6及び図7に示すように、塵埃分離部210は、集塵容器220の上部に結合されて、塵埃分離部210から塵埃が分離された空気が下側へ移動されて、集塵容器220の内部に捕集される。
そして、カバー211dの中央部には、塵埃分離部210の内部、すなわちサイクロン部211によって塵埃が分離された空気が排出される排出口211bが形成される。
そして、排出口211bには、中空状の排気部材211cが結合され、排気部材211cの外周面には、サイクロン部211から塵埃分離過程を経た空気が排出される複数の通孔が形成される。
このとき、塵埃排出口231は、第2加圧部材320の反対側に形成されることが好ましい。
塵埃分離部210と集塵容器220との結合のために、塵埃分離部210と集塵容器220には、それぞれ上部取っ手212と下部取っ手223が備えられる。
詳細には、塵埃分離部210の外周面の下段には、フック係止部241が備えられ、集塵容器220の外周面の上段には、フック係止部241に選択的に結合されるフック部242が備えられる。
ここで、補助サイクロン部140は、主サイクロン部211から排出される空気に含まれた塵埃を二次的に分離する機能を果たし、補助捕集部224は、補助サイクロン部140から分離される塵埃を捕集する機能を果たす。
本実施の形態において、補助捕集部224は、集塵容器220の外周面に備えられ、塵埃分離部210の外周面には、補助捕集部224と連通する補助塵埃流入部213が提供される。
これにより、主サイクロン部211が掃除機本体100に装着されると、補助塵埃流入ホール213aは補助サイクロン部140の塵埃排出口141と連結される。
したがって、補助サイクロン部140から分離される塵埃は、補助塵埃流入口213aを介して流入して、補助捕集部224に捕集される。
まず、真空掃除機に電源が供給されると、吸入モータによって吸入力が発生し、このような空気吸入力によって吸入ノズルに塵埃が含まれた空気が吸入される。
そして、吸入ノズルに吸入された空気は、本体吸入部110を経て主サイクロン部211の吸入口211aに流入される。そして、主サイクロン部211の吸入口211aを介して流入した空気は、主サイクロン部211の内壁に接線方向に案内されて、螺旋流を形成するようになり、これにより、空気に含まれた塵埃は、空気との遠心力の差により分離されて下降する。
そして、主サイクロン部211により一次的に塵埃が分離された空気は、排気部材211cを経て排出口211bを介して排出された後、補助サイクロン部に流入する。これにより、補助サイクロン部140の内部からサイクロン原理により分離された塵埃は、補助捕集部224に捕集され、補助サイクロン部140から分離された空気は、補助サイクロン部140から排出された後、掃除機本体100に流入して、本体排出部120を介して掃除機本体100から排出される。
そして、ユーザは、集塵装置200を掃除機本体100から分離し、集塵容器220の内部の塵埃を除塵する。
図8は、集塵装置の内部の塵埃圧縮過程を示すフローチャートであり、図9〜図13は、集塵装置の内部の塵埃圧縮過程を示す集塵容器の平面図である。
詳細には、駆動モータ430が一方向に回転されると、駆動モータ430の回転動力が駆動ギア420を介して従動ギア410に伝達されて、従動ギア410が回転される。そして、従動ギア410の回転によって、回転軸312及び第1加圧部材310が一方向に回転される(S110)。
すると、第1加圧部材310は、停止した位置で一定時間の間、塵埃を加圧する。そして、一定時間が経過すると、再度駆動モータ430が駆動されて、第1加圧部材310が他方向に回転される(S140)。
そして、第1加圧部材310が時計方向に回転されると、第1加圧部材310は、第1加圧部材310と第2加圧部材320との間の塵埃を第2加圧部材320の他側面側に押し出して、塵埃を圧縮させる。
そして、抵抗力が設定値以上であると判断されると、駆動モータ430に印加される電源が遮断されて、第1加圧部材310が塵埃を圧縮した状態で停止する(S160)。
このように、圧縮作用は、図9〜図13に示すように、真空掃除機の作動中に継続的に繰り返される。
そして、第1加圧部材310の回転範囲(θ)が基準値(θp)以下になる場合、塵埃の除塵時期が外部に通知される(S180)。
そして、ユーザによって掃除機の作動が停止すれば、塵埃圧縮過程が終了する。
図14に示すように、ユーザの操作により掃除が行われると、空気中から塵埃が分離されて、塵埃捕集部221に捕集される。そして、一対の加圧部材310、320によって塵埃捕集部221に捕集された塵埃が圧縮される過程が行われる(S100)。ここで、塵埃圧縮過程は上述のおりであるので、詳細な説明は省略する。
詳細には、第1加圧部材310は、移動していた方向と同じ方向である第2加圧部材320側に移動し続け、このように第1加圧部材310が移動する過程で、第1加圧部材310に作用する抵抗力が設定値以上になったか否かが判断される(S220)。そして、第1加圧部材に作用する抵抗力が設定値以上であると、第1加圧部材310は停止する(S230)。
すなわち、第1加圧部材310が吸入モータの作動停止の際、直ちに停止せず、塵埃を加圧し続ける位置まで第2加圧部材320側に移動した後に停止する。
そして、このように吸入モータの作動停止時にも、一対の加圧部材310、320によって塵埃の圧縮作用が維持されることから、吸入モータの作動停止後、ユーザが集塵装置200の内部の塵埃を除塵するとき、塵埃が容易に排出される。
110 本体吸入部
120 本体排出部
130 集塵装置装着部
200 集塵装置
210 塵埃分離部
211 サイクロン部
220 集塵容器
221 塵埃捕集部
310、320 加圧部材
312 回転軸
322 固定軸
410 従動ギア
420 駆動ギア
430 駆動モータ
Claims (19)
- 塵埃が捕集される集塵装置が備えられる真空掃除機において、
吸入モータが作動して、前記集塵装置の内部に塵埃が捕集されるステップと、
少なくとも1つの移動可能な加圧部材によって、前記集塵装置の内部に捕集される塵埃の体積を減少させる圧縮ステップと、が含まれる真空掃除機の制御方法。 - 前記圧縮ステップでは、
前記加圧部材が、前記集塵装置の内部に固定された固定部材の一側へ移動される請求項1に記載の真空掃除機の制御方法。 - 前記圧縮ステップでは、
一側へ移動された前記加圧部材が、前記固定部材の他側へ移動される請求項2に記載の真空掃除機の制御方法。 - 前記圧縮ステップでは、
前記加圧部材に作用する抵抗力が設定値以上に到達したか否かが判断される請求項2又は3に記載の真空掃除機の制御方法。 - 前記抵抗力が設定値以上に到達した場合、前記加圧部材は、一定時間の間、停止する請求項4に記載の真空掃除機の制御方法。
- 前記加圧部材が一定時間停止した後には、以前の移動方向と反対方向に回転される請求項5に記載の真空掃除機の制御方法。
- 前記圧縮ステップでは、
前記加圧部材の移動範囲が設定値以下になるか否かが判断される請求項1に記載の真空掃除機の制御方法。 - 前記移動範囲が設定値以下になると、これを外部に通知する通知ステップがさらに含まれる請求項7に記載の真空掃除機の制御方法。
- 前記吸入モータの作動停止後、前記加圧部材が前記集塵装置の内部に固定される固定部材の一側へ移動されて停止するステップがさらに含まれる請求項1に記載の真空掃除機の制御方法。
- 前記加圧部材は、前記集塵装置内で回転される請求項1に記載の真空掃除機の制御方法。
- 吸入モータの作動によって吸入された空気中の塵埃が捕集される集塵装置が備えられる真空掃除機において、
前記吸入モータの作動が停止するステップと、
前記集塵装置の内部に備えられた複数の加圧部材のうち、少なくとも1つの加圧部材が異なる加圧部材側に移動されて停止するステップと、が含まれる真空掃除機の制御方法。 - 前記少なくとも1つの加圧部材は、回転部材であり、
前記他の加圧部材は、前記集塵装置の内部に固定される固定部材である請求項11に記載の真空掃除機の制御方法。 - 前記回転部材は、停止した位置で前記回転部材と前記固定部材との間の塵埃を圧縮させる請求項12に記載の真空掃除機の制御方法。
- 前記回転部材の停止位置は、前記回転部材に作用する抵抗力が設定値以上になる瞬間の位置である請求項12に記載の真空掃除機の制御方法。
- 前記回転部材は、1つが提供され、
前記吸入モータの作動停止時、前記回転部材は、前記固定部材の一側へ移動される請求項12に記載の真空掃除機の制御方法。 - 前記固定部材の一側は、前記回転部材が進行していた方向である請求項15に記載の真空掃除機の制御方法。
- 前記回転部材が前記固定部材の一側へ移動された後には、前記固定部材の他側へ移動されて停止する請求項15に記載の真空掃除機の制御方法。
- 前記回転部材は一対が提供され、
前記吸入モータの作動停止時、何れか1つの回転部材は、前記固定部材の一側へ移動された後に停止し、残りの回転部材は、前記固定部材の他側へ移動された後に停止する請求項12に記載の真空掃除機の制御方法。 - 前記吸入モータの作動中には、前記加圧部材によって前記集塵装置の内部に捕集された塵埃の圧縮作用が行われる請求項12に記載の真空掃除機の制御方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060018120A KR100871485B1 (ko) | 2006-02-24 | 2006-02-24 | 먼지 압축식 집진장치의 운전방법 |
| KR1020060045415A KR100895145B1 (ko) | 2006-05-20 | 2006-05-20 | 진공 청소기의 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007222613A true JP2007222613A (ja) | 2007-09-06 |
| JP2007222613A5 JP2007222613A5 (ja) | 2008-12-11 |
Family
ID=38006737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007019770A Pending JP2007222613A (ja) | 2006-02-24 | 2007-01-30 | 真空掃除機の制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1825797B1 (ja) |
| JP (1) | JP2007222613A (ja) |
| AU (1) | AU2007200407B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009011478A1 (en) * | 2007-07-16 | 2009-01-22 | Lg Electronics Inc. | Vacuum cleaner |
| KR100941429B1 (ko) * | 2008-02-19 | 2010-02-11 | 엘지전자 주식회사 | 진공 청소기 |
| WO2010005139A1 (en) * | 2008-07-08 | 2010-01-14 | Lg Electronics Inc. | Vacuum cleaner |
| KR101340207B1 (ko) | 2009-08-24 | 2013-12-10 | 엘지전자 주식회사 | 진공 청소기 |
| WO2011055864A1 (ko) * | 2009-11-04 | 2011-05-12 | 엘지전자 주식회사 | 진공청소기 |
| CN102100507A (zh) * | 2009-12-18 | 2011-06-22 | 乐金电子(天津)电器有限公司 | 一种具有手动压缩结构的新型吸尘器集尘桶 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5351663A (en) * | 1976-10-20 | 1978-05-11 | Sanyo Electric Co Ltd | Vacuum cleaner |
| JPS5485560A (en) * | 1977-12-20 | 1979-07-07 | Tokyo Electric Co Ltd | Electric cleaner |
| JPS54114367U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54114366U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54114358U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54119272U (ja) * | 1978-02-10 | 1979-08-21 | ||
| JPS5574553U (ja) * | 1978-11-20 | 1980-05-22 | ||
| JP2005034213A (ja) * | 2003-07-16 | 2005-02-10 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54161751A (en) * | 1978-06-09 | 1979-12-21 | Sanyo Electric Co Ltd | Electric vacuum cleaner |
| JP3004538B2 (ja) * | 1994-06-17 | 2000-01-31 | シャープ株式会社 | 電気掃除機 |
| JP2002360474A (ja) * | 2001-06-05 | 2002-12-17 | Toshiba Tec Corp | 集塵装置および電気掃除機 |
| JP3699679B2 (ja) * | 2001-12-28 | 2005-09-28 | 松下電器産業株式会社 | 電気掃除機 |
| JP3899458B2 (ja) * | 2002-01-07 | 2007-03-28 | 三菱電機株式会社 | 電気掃除機 |
| CN100512740C (zh) * | 2004-04-07 | 2009-07-15 | 东芝泰格株式会社 | 电动吸尘器 |
-
2007
- 2007-01-30 EP EP20070101391 patent/EP1825797B1/en active Active
- 2007-01-30 JP JP2007019770A patent/JP2007222613A/ja active Pending
- 2007-01-31 AU AU2007200407A patent/AU2007200407B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5351663A (en) * | 1976-10-20 | 1978-05-11 | Sanyo Electric Co Ltd | Vacuum cleaner |
| JPS5485560A (en) * | 1977-12-20 | 1979-07-07 | Tokyo Electric Co Ltd | Electric cleaner |
| JPS54114367U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54114366U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54114358U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS54119272U (ja) * | 1978-02-10 | 1979-08-21 | ||
| JPS5574553U (ja) * | 1978-11-20 | 1980-05-22 | ||
| JP2005034213A (ja) * | 2003-07-16 | 2005-02-10 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1825797A3 (en) | 2012-04-11 |
| AU2007200407A1 (en) | 2007-09-13 |
| EP1825797B1 (en) | 2013-10-23 |
| EP1825797A2 (en) | 2007-08-29 |
| AU2007200407B2 (en) | 2009-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4695102B2 (ja) | 集塵装置及び真空掃除機 | |
| JP4705052B2 (ja) | 真空掃除機の制御方法 | |
| EP1949842B1 (en) | Vacuum cleaner | |
| KR102656583B1 (ko) | 로봇 청소기 | |
| CA2617398C (en) | A vacuum cleaner | |
| EP3750461B1 (en) | Dust collecting apparatus for vacuum cleaner and vacuum cleaner including same | |
| KR100871485B1 (ko) | 먼지 압축식 집진장치의 운전방법 | |
| KR100871487B1 (ko) | 진공 청소기의 제어 방법 | |
| JP2007307352A (ja) | 真空掃除機 | |
| KR100906848B1 (ko) | 진공 청소기 | |
| CN101023852A (zh) | 集尘器和真空吸尘器 | |
| JP2007222613A (ja) | 真空掃除機の制御方法 | |
| KR100485712B1 (ko) | 사이클론 진공청소기의 오물수거통 착탈장치 및 이를구비하는 사이클론 진공청소기 | |
| JP4625039B2 (ja) | 真空掃除機及びその制御方法 | |
| EP3005923B1 (en) | Dust collector for vacuum cleaner | |
| JP2010104502A (ja) | 電気掃除機 | |
| KR100895145B1 (ko) | 진공 청소기의 제어 방법 | |
| KR100992221B1 (ko) | 진공 청소기 | |
| JP5210758B2 (ja) | 電気掃除機 | |
| JP2009226132A (ja) | 電気掃除機 | |
| KR101093941B1 (ko) | 진공 청소기 | |
| JP2008272021A (ja) | 集塵装置および電気掃除機 | |
| KR101136618B1 (ko) | 진공 청소기의 제어방법 | |
| JP2004105538A (ja) | 電気掃除機 | |
| KR100833362B1 (ko) | 진공 청소기의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090317 |
|
| A601 | Written request for extension of time |
Effective date: 20090616 Free format text: JAPANESE INTERMEDIATE CODE: A601 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090619 |
|
| A521 | Written amendment |
Effective date: 20090805 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Effective date: 20091110 Free format text: JAPANESE INTERMEDIATE CODE: A02 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100310 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100323 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20100514 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110712 |