JP4625039B2 - 真空掃除機及びその制御方法 - Google Patents
真空掃除機及びその制御方法 Download PDFInfo
- Publication number
- JP4625039B2 JP4625039B2 JP2007066748A JP2007066748A JP4625039B2 JP 4625039 B2 JP4625039 B2 JP 4625039B2 JP 2007066748 A JP2007066748 A JP 2007066748A JP 2007066748 A JP2007066748 A JP 2007066748A JP 4625039 B2 JP4625039 B2 JP 4625039B2
- Authority
- JP
- Japan
- Prior art keywords
- dust
- pressure member
- time
- motor
- dust collector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/19—Means for monitoring filtering operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/106—Dust removal
- A47L9/108—Dust compression means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Filters For Electric Vacuum Cleaners (AREA)
- Electric Vacuum Cleaner (AREA)
Description
かかる真空掃除機は、大きく吸入口であるノズル部が本体と別途に備えられて、連結管によって連結されるキャニスタ方式と、ノズル部が本体と一体に形成されるアップライト方式に区別することができる。
詳細には、サイクロン集塵装置は、集塵体と、集塵体に空気が吸入されるようにする吸入口と、集塵体に吸入される空気の中から塵埃を分離させるサイクロン部と、サイクロン部から分離された塵埃が捕集される塵埃捕集部と、サイクロン部から塵埃が分離された空気が排出される排出口とが備えられる。
そして、真空掃除機の作動が停止すると、集塵体の底面にそのまま沈んで、密度の低い状態で捕集される。
また、本発明の他の目的は、集塵装置の内部に備えられた塵埃の圧縮が自動に行われる真空掃除機及びその制御方法を提案することにある。
また、本発明のさらに他の目的は、集塵装置に一定量以上の塵埃が捕集された場合、塵埃の除塵時期が表示されるようにする真空掃除機及びその制御方法を提案することにある。
また、複数の加圧部材の圧縮作用によって、集塵装置の集塵容量が最大になることによって、ユーザが集塵装置の内部に捕集された塵埃を頻りに除塵しなければならないという面倒さがなくなるという効果がある。
また、集塵装置の内部に捕集された塵埃が真空掃除機の作動が停止したときにも、圧縮された状態を維持することにより、塵埃を除塵する際、集塵装置の内部に捕集されたこの塵埃が集塵装置の外部に容易に排出されるという効果がある。
また、集塵装置の内部に所定量以上の塵埃が集塵されると、集塵装置の塵埃の除塵時期が表示されて、ユーザが塵埃を除塵する時期が容易に分かるという効果がある。
また、塵埃の除塵時期が表示されるとともに、第1加圧部材が塵埃の除塵が容易な位置に移動することにより、ユーザが便利に塵埃を除塵することができるという効果がある。
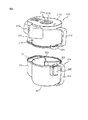
図1は、本発明の一実施の形態に係る真空掃除機から集塵装置が分離された状態の斜視図である。
図1に示すように、本発明に一実施の形態に係る真空掃除機は、内部に吸入モータが備えられる掃除機本体100と、吸入された空気中に含まれた塵埃を分離して捕集する集塵装置200とが備えられて構成される。
詳細には、掃除機本体100の前面下段部には、吸入ノズル20から吸入された塵埃が含まれた空気が吸入される本体吸入部110が形成される。
一方、集塵装置200は、吸入される空気中に含まれた塵埃を分離させる塵埃分離部210と、塵埃分離部210から分離された塵埃が捕集される集塵容器220とが備えられる。
図2は、真空掃除機に適用される集塵装置装着部と集塵装置とを分離して示した斜視図であり、図3は、集塵装置の断面斜視図であり、図4は、図3のA部分の拡大図であり、図5は、集塵装置に捕集された塵埃の圧縮のために提供される駆動装置と集塵装置との結合関係を示す斜視図である。
そして、掃除機本体100には、集塵装置200が装着されるための集塵装置装着部130が提供される。
そして、集塵装置200には、集塵容器220に捕集される塵埃の体積を減少させて、塵埃の集塵容量を増加させる一対の加圧部材310、320が備えられる。
以下では、説明の便宜のために、一対の加圧部材310、320のうちの何れか1つを第1加圧部材310とし、残りの1つを第2加圧部材320とする。
すなわち、第1加圧部材310と第2加圧部材320が集塵容器220の内部に回転可能に備えられる場合、第1加圧部材310と第2加圧部材320は互いに向かって回転移動しながら、第1加圧部材310の一側面と第1加圧部材310の一側面に対向する第2加圧部材320の一側面との間の間隔が狭くなり、これにより、第1加圧部材310及び第2加圧部材320の間に位置する塵埃が圧縮される。
したがって、第1加圧部材310は、回転部材となり、第2加圧部材320は、固定部材となる。
詳細には、第2加圧部材320は、塵埃捕集部221の内周面と第1加圧部材310の回転中心をなす回転軸312の軸線間に提供されることが好ましい。
もちろん、第2加圧部材320の一端のみが塵埃捕集部221の内周面に一体に形成されるか、他端のみが固定軸322に一体に形成されることができる。言い換えれば、第2加圧部材320は、塵埃捕集部221の内周面と固定軸322のうち、少なくとも何れか一側に固定される。
そして、第2加圧部材320の他端が固定軸322に一体に連結されなくても、第2加圧部材320の他端は、固定軸322に隣接することが好ましい。
その理由は、第1加圧部材310により押し寄せる塵埃が、第2加圧部材320の側方に形成された隙間を介して漏れることを最小化するためである。
上記の構成に加えて、本発明に係る真空掃除機は、第1加圧部材310の回転軸312に連結されて、第1加圧部材310を回転させる駆動装置400がさらに備えられる。
駆動装置400は、駆動力を発生させる圧縮モータ430と、圧縮モータ430の駆動力を第1加圧部材310に伝達する動力伝達部410、420が備えられる。
そして、駆動ギア420は、駆動モータ430の回転軸に結合されて、駆動モータ430により回転される。
ここで、圧縮モータ430は、集塵装置装着部130の下側に備えられ、駆動ギア420は、圧縮モータ430の回転軸に結合されて、集塵装置装着部130の底面に備えられる。
このために、集塵装置装着部130の底面の下側には、圧縮モータ430が設置されるモータ収容部(図示せず)が形成されることが好ましく、集塵装置装着部130の底面には、駆動ギア420の外周面の一部を外部に露出させるための開口部131が形成される。
そして、回転軸312には、固定軸322の上段により支持される段差部312cが形成され、段差部312cを基準に、第1加圧部材310が結合される上部軸312aと、従動ギア410が結合される下部軸312bとに分けられる。
ここで、溝312dは、円状、四角形などの多様な形状に形成されることができ、従動ギア410のギア軸は、溝312dと対応する形状に形成される。
このように従動ギア410が集塵容器220の外部に露出するに伴い、集塵装置装着部130に集塵装置200が装着されると、従動ギア410が駆動ギア420と噛み合う。
このように、圧縮モータ430の正逆回転を可能にするため、圧縮モータ430は、シンクロナスモータ(synchronous motor)が用いられることができる。
このとき、モータに加えられる力は、第1加圧部材310が塵埃を加圧することによって発生する抵抗力(トルク)であって、抵抗力が設定された値に到達すると、モータの回転方向が変換されるように構成される。
ここで、第1加圧部材310が回転できない頂点とは、抵抗力が設定値に到達した場合を意味する。
また、集塵容器220の内部に所定量以上の塵埃が集塵されると、集塵性能の低下とモータの過負荷などを防止するために、集塵容器220の除塵時期をユーザに表示することが好ましい。
このような通知部510、520は、ユーザに視覚的に集塵容器220の除塵時期を通知し得るようにするLED510(light emitting diode)であり得、ユーザに聴覚的に集塵容器220の除塵時期を通知し得るようにするスピーカー520でもあり得る。
図6及び図7に示すように、塵埃分離部210は、集塵容器220の上部に結合されて、塵埃分離部210から塵埃が分離された空気が下側へ移動されて、集塵容器220の内部に捕集される。
そして、カバー211dの中央部には、塵埃分離部210の内部、すなわちサイクロン部211によって塵埃が分離された空気が排出される排出口211bが形成される。
このとき、塵埃排出口231は、第2加圧部材320の反対側に形成されることが好ましい。
上記のように、塵埃分離部210と集塵容器220との結合のために、塵埃分離部210には、それぞれ上部取っ手212と下部取っ手223が備えられる。
詳細には、塵埃分離部210の外周面の下段には、フック係止部241が備えられ、集塵容器220の外周面の上段には、フック係止部241に選択的に結合されるフック部242が備えられる。
ここで、補助サイクロン部140は、主サイクロン部211から排出される空気に含まれた塵埃を二次的に分離する機能を果たし、補助捕集部224は、補助サイクロン部140から分離される塵埃を捕集する機能を果たす。
そして、補助捕集部224は、上段が開口した状態で集塵装置200の外周面に備えられる。
ここで、補助塵埃流入部213の外壁には、補助サイクロン部140の塵埃排出口141に選択的に連結される補助塵埃流入ホール213aが形成され、補助塵埃流入部213の底面は開放されて、補助捕集部224の上段と連通される。
したがって、補助サイクロン部140から分離される塵埃は、補助塵埃流入ホール213aを介して流入して、補助捕集部224に捕集される。
まず、真空掃除機に電源が供給されると、吸入モータにより吸入力が発生し、このような空気吸入力によって吸入ノズル40に塵埃が含まれた空気が吸入される。
そして、主サイクロン部211により一次的に塵埃が分離された空気は、排気部材211cを経て排出口211bを介して排出された後、補助サイクロン部140に流入する。
そして、ユーザは、集塵装置200を掃除機本体100から分離し、集塵容器220の内部の塵埃を除塵する。
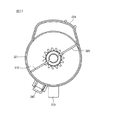
図8は、集塵装置の内部の塵埃を圧縮するための制御構造を示すブロック図であり、図9は、集塵装置の内部の塵埃圧縮過程を示すフローチャートである。また、図10の(a)は、塵埃圧縮時間に応じる圧縮モータの電流位相の波形図であり、図10の(b)は、塵埃圧縮時間に応じる圧縮モータに印加される電源位相の波形図であり、図11及び図12は、集塵装置の内部の塵埃圧縮過程を示す集塵容器の平面図である。
詳細には、圧縮モータ430は、上述のように、両方向回転が可能であり、圧縮モータ430は、第1加圧部材310に加えられる抵抗力が設定値以上になる場合、その回転方向が変化する。
上記の構成により、掃除が行われると、サイクロン部211から分離された塵埃は、塵埃捕集部221に塵埃が捕集される。このように塵埃が捕集される過程で一対の加圧部材310、320は、塵埃捕集部221に捕集された塵埃を圧縮させる。
このとき、駆動ギア420と従動ギア410とは互いに噛み合っているので、圧縮モータ430が一方向に回転されると、駆動ギア420は、圧縮モータ430と同じ方向に回転され、従動ギア410は、圧縮モータ430の回転方向と反対方向である他方向に回転される。すなわち、従動ギア410及び回転軸312の回転方向は、圧縮モータ430の回転方向と反対方向になることが分かる。
そして、電流感知部610から感知された電流値が制御部600に送出され、制御部600は、モータ駆動部620に圧縮モータ430に印加される電源を遮断する信号を送出する。すると、圧縮モータ430の駆動は停止し、これにより、第1加圧部材310が塵埃を圧縮した状態で停止する(S130)。そして、第1加圧部材310は、停止した位置で一定時間(t)の間、塵埃を加圧する。
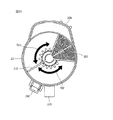
ここで、第1加圧部材310は、抵抗力が設定された値に到達された状態で停止したので、その回転方向が変換して、図12のように時計方向に回転される。
このように、第1加圧部材310の回転中には、第1加圧部材310に加えられる抵抗力が設定値に到達されたか否かが判断される(S150)。
そして、抵抗力が設定値以上であると判断されると、圧縮モータ430に印加される電源が遮断されて、第1加圧部材310が塵埃を圧縮した状態で停止する(S160)。
このような圧縮作用は、第1加圧部材310の回転範囲が一定角度以下になるまで繰り返し行われ、このような過程で、ユーザによって掃除機の作動が停止すると(S170)、塵埃の圧縮過程が終了する。
図13〜図15に示すように、ユーザの操作によって掃除が行われると、塵埃が含まれた空気の中から塵埃が分離されて、集塵装置200に捕集され、一対の加圧部材310、320によって塵埃の圧縮過程が行われる(S100)。ここで、塵埃圧縮過程は、上述のものと同様なので、詳細な説明は省略する。
ここで、掃除機本体100には、第1加圧部材310の回転範囲に応じる概略的な塵埃の量が捕集されたメモリ部(図示せず)がさらに備えられることができる。
そして、数値的に移動時間(S)は、図10の(b)を参考すると、B−(A+t)値を有する。
万一、第1加圧部材310の移動時間(S)が基準時間(Sc)未満になった場合には、第1加圧部材310の移動時間(S)が基準時間(Sc)未満と断される回数が累積設定回数、例えば10回となったか否かを判断するステップがさらに行われる(S400)。
これに対し、第1加圧部材310の移動時間(S)が基準時間(Sc)以上の場合や、第1加圧部材310の移動時間(S)が基準時間(Sc)未満になっても、累積設定回数未満に該当する場合には、第1加圧部材310の圧縮作用が持続的に行われる。
時間が経過にともない塵埃の量が増加すると、第1加圧部材310の左右回転移動時間(言い換えれば、左右移動距離が短くなるとも言える)は、順次に減少する。
全体的に要約すれば、本実施の形態では、集塵装置の内部に捕集される塵埃を圧縮して集塵効率を上げるとともに、塵埃を圧縮するために駆動される圧縮モータに連動して回動するギアの回転数をパルス信号に変換させ、塵埃の量に応じるパルス信号の変化を感知して、除塵時期が表示されるようにする。
詳細には、マイクロスイッチ450は、マイクロスイッチ450のオン/オフを可能にする端子部460が従動ギア410の下側に当接する状態になるように、従動ギア410の下部に位置する。
したがって、従動ギア410が回転する場合、マイクロスイッチ450は、端子部460が位置確認溝415に位置する場合を除いては、オン状態を維持する。
図24に示すように、本発明の第3の実施の形態に係る真空掃除機は、制御部810と、塵埃の吸入パワー(例えば、強、中、約モード)を選択する動作信号入力部820と、集塵装置200に集塵された塵埃を除塵しろという信号が表示される塵埃交換信号表示部830と、動作信号入力部820から入力される動作モード(すなわち、強、中、約モード)に応じて、塵埃が集塵装置200の内部に吸入されるようにするための吸入モータ850を作動させるための吸入モータドライバー840と、集塵装置の内部に集塵される塵埃の加圧に用いられる圧縮モータ430を作動させるための圧縮モータドライバー860と、圧縮モータ430により駆動される駆動ギア420と、駆動ギア420と噛み合って回転移動する従動ギア410と、従動ギア410の回転に応じてオンまたはオフするマイクロスイッチ450を少なくとも備える。
そして、第1加圧部材310が基準位置から半時計方向に回転しながら集塵体210内に集積された塵埃を圧縮する間、端子部460は、従動ギア410の接触リブ413と当接触するので、マイクロスイッチ450の接点452を押さえて、図26から分かるように、マイクロスイッチ450がオン状態となる。
そして、時計方向に回転していた第1加圧部材310が塵埃の影響でもうこれ以上回転できなくなると、圧縮モータ430は、半時計方向に回転しながらいままで説明した過程を繰り返し行いながら、集塵体210内に集積された塵埃の圧縮が行われるようにする。
図31には、第1加圧部材270が基準位置から時計方向に回転して、再度基準位置まで復帰するまで必要な時間(TD1)と、第1加圧部材270が基準位置から半時計方向に回転して、再度基準位置まで復帰するまで必要な時間(TD2)が表示されている。説明の便宜上、時間(TD1)を第1往復時間、時間(TD2)を第2往復時間という。通常、塵埃は、集塵体210の内部に均一に拡散されるので、第1往復時間(TD1)と第2往復時間(TD2)は、ほとんど等しいと言える。
一方、第1加圧部材310によって圧縮される塵埃の量が増加するほど、第1往復時間(TD1)と第2往復時間(TD2)は、次第に短縮される。
本発明では、第1往復時間(TD1)と第2往復時間(TD2)のうちの何れか1つが所定の基準時間に到達する場合、集塵体210内に塵埃が十分に集積されたと判断して、塵埃の除塵信号が表示されるようにする。
図32に示すように、ユーザは、動作信号入力部820に表示されている吸入パワーである強、中、約モードのうちの1つを選択して、真空掃除機を作動させる。すると、制御部810は、ユーザが選択した吸入モードに応じて吸入モータ850が駆動されるように、吸入モータドライバー840を作動させる(S1210)。
すなわち、制御部810は、集塵容器200に捕集された塵埃を圧縮させるために、圧縮モータ430を駆動させる(S1220)。
したがって、制御部810は、マイクロスイッチ450が初めてオフする時点を基準として、第1往復時間または第2往復時間を測定する。
ここで、第1加圧部材310と第2加圧部材320によって集塵体210の内部で圧縮される塵埃の量が増加するほど、従動ギア410の左右往復回転時間が短くなる。
ここで、所定の基準時間は、設計者によって制御部810自体に設定した時間であって、これは、集塵体210内に塵埃が一定量以上積まれたと判断する根拠となる。基準時間は、設計者が多数回繰り返し実験して得られるもので、真空掃除機の容量に応じて変わる。
110 本体吸入部
120 本体排出部
130 集塵装置装着部
200 集塵装置
210 塵埃分離部
211 サイクロン部
220 集塵容器
221 塵埃捕集部
310、320 加圧部材
312 回転軸
322 固定軸
410 従動ギア
420 駆動ギア
430 圧縮モータ
Claims (2)
- 集塵容器に捕集された塵埃を圧縮するために掃除機本体に設けられる圧縮モータによって加圧部材が自動で移動するステップと、
前記加圧部材の移動範囲を利用して塵埃量を判断するステップと、
判断された塵埃量が一定量以上であると、除塵信号が発生されるステップと、
が含まれ、
前記加圧部材は集塵容器内で両方向に移動し、
前記加圧部材の移動方向の変化は前記圧縮モータの電流値に応じて決定され、
前記塵埃量は前記加圧部材の前記移動範囲を基準に判断され、
前記加圧部材の前記移動範囲は、前記集塵容器に備えられる固定部材の一側で前記加圧部材が停止する時の位置である第1基準位置から、前記固定部材の他側で前記加圧部材が停止する時の位置である第2基準位置まで移動する時間で決定される真空掃除機の制御方法。 - 集塵容器に捕集された塵埃を圧縮するために掃除機本体に設けられる圧縮モータによって加圧部材が自動で移動するステップと、
前記加圧部材の移動範囲を利用して塵埃量を判断するステップと、
判断された塵埃量が一定量以上であると、除塵信号が発生されるステップと、
が含まれ、
前記加圧部材は集塵容器内で両方向に移動し、
前記加圧部材の前記移動方向の変化は前記圧縮モータの電流値に応じて決定され、
前記塵埃量は前記加圧部材の前記移動範囲を基準に判断され、
前記加圧部材の前記移動範囲は、前記加圧部材が前記集塵容器に備えられる固定部材と一直線を成す時の位置である第1基準位置から、前記集塵容器に備えられる固定部材に向けて移動した後 方向転換して、また前記第1基準位置まで移動する時の位置であって、前記第1基準位置と同一位置である、第2基準位置まで移動する時間で決定される真空掃除機の制御方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060046077A KR100871487B1 (ko) | 2006-05-23 | 2006-05-23 | 진공 청소기의 제어 방법 |
| KR1020060085919A KR100906849B1 (ko) | 2006-09-06 | 2006-09-06 | 진공 청소기 및 그의 제어 방법 |
| KR1020060098191A KR100833362B1 (ko) | 2006-10-10 | 2006-10-10 | 진공 청소기의 제어 방법 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007313293A JP2007313293A (ja) | 2007-12-06 |
| JP2007313293A5 JP2007313293A5 (ja) | 2008-12-18 |
| JP4625039B2 true JP4625039B2 (ja) | 2011-02-02 |
Family
ID=38558088
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007066748A Expired - Fee Related JP4625039B2 (ja) | 2006-05-23 | 2007-03-15 | 真空掃除機及びその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1859719B1 (ja) |
| JP (1) | JP4625039B2 (ja) |
| AU (1) | AU2007200409B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2008276858B2 (en) | 2007-07-16 | 2011-02-03 | Lg Electronics Inc. | Vacuum cleaner and method of controlling the same |
| JP4589989B2 (ja) * | 2008-07-03 | 2010-12-01 | シャープ株式会社 | サイクロン分離装置 |
| CN102210574B (zh) * | 2010-04-12 | 2015-08-05 | 乐金电子(天津)电器有限公司 | 集尘桶压缩装置 |
| JP2022518781A (ja) * | 2019-01-25 | 2022-03-16 | シャークニンジャ オペレーティング エルエルシー | 掃除機用のサイクロン分離器およびそれを有する掃除機 |
| CN110840329A (zh) * | 2019-11-28 | 2020-02-28 | 安徽富坤机械设备有限公司 | 一种吸尘器集尘装置 |
| CN112013923A (zh) * | 2020-09-07 | 2020-12-01 | 追创科技(苏州)有限公司 | 集尘桶的尘满检测系统及方法 |
| JP2022090967A (ja) * | 2020-12-08 | 2022-06-20 | 東芝ライフスタイル株式会社 | 電気掃除機及び電気掃除システム |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002187336A (ja) * | 2000-12-21 | 2002-07-02 | Tohoku Ricoh Co Ltd | 排版収納装置及び孔版印刷機 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5485560A (en) * | 1977-12-20 | 1979-07-07 | Tokyo Electric Co Ltd | Electric cleaner |
| JPS6028377Y2 (ja) * | 1978-01-31 | 1985-08-28 | 東芝テック株式会社 | 電気掃除機の集塵量検出装置 |
| JPS54114366U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPS5822684Y2 (ja) * | 1978-11-20 | 1983-05-14 | 三洋電機株式会社 | 電気掃除機 |
| DE3242929A1 (de) * | 1982-11-20 | 1984-05-24 | Vorwerk & Co Interholding Gmbh, 5600 Wuppertal | Filtereinrichtung, insbesondere fuer staubsauger |
| JPS58175532A (ja) * | 1983-03-28 | 1983-10-14 | 東芝テック株式会社 | 電気掃除機 |
| JP3729726B2 (ja) * | 2000-11-13 | 2005-12-21 | シャープ株式会社 | 電気掃除機 |
| JP2004065357A (ja) * | 2002-08-02 | 2004-03-04 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
| JP2006061439A (ja) * | 2004-08-27 | 2006-03-09 | Funai Electric Co Ltd | 自走式掃除機 |
-
2007
- 2007-01-30 EP EP20070101387 patent/EP1859719B1/en active Active
- 2007-01-31 AU AU2007200409A patent/AU2007200409B2/en active Active
- 2007-03-15 JP JP2007066748A patent/JP4625039B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002187336A (ja) * | 2000-12-21 | 2002-07-02 | Tohoku Ricoh Co Ltd | 排版収納装置及び孔版印刷機 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1859719B1 (en) | 2014-03-12 |
| EP1859719A2 (en) | 2007-11-28 |
| AU2007200409A1 (en) | 2007-12-13 |
| JP2007313293A (ja) | 2007-12-06 |
| AU2007200409B2 (en) | 2009-05-28 |
| EP1859719A3 (en) | 2012-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4705052B2 (ja) | 真空掃除機の制御方法 | |
| JP4625039B2 (ja) | 真空掃除機及びその制御方法 | |
| EP4049573B1 (en) | Cleaning device having vacuum cleaner and docking station and method of controlling the same | |
| JP4695102B2 (ja) | 集塵装置及び真空掃除機 | |
| KR100871487B1 (ko) | 진공 청소기의 제어 방법 | |
| US8404034B2 (en) | Vacuum cleaner and method of controlling the same | |
| US8012250B2 (en) | Vacuum cleaner | |
| US20110209303A1 (en) | Vacuum cleaner | |
| JP4904226B2 (ja) | サイクロン集塵装置,電気掃除機 | |
| KR100809773B1 (ko) | 진공 청소기의 제어방법 | |
| RU2413451C1 (ru) | Пылесос | |
| JP2007222613A (ja) | 真空掃除機の制御方法 | |
| JP4904225B2 (ja) | サイクロン集塵装置,電気掃除機 | |
| KR100906849B1 (ko) | 진공 청소기 및 그의 제어 방법 | |
| JP5040454B2 (ja) | 電気掃除機 | |
| KR100833362B1 (ko) | 진공 청소기의 제어 방법 | |
| KR100813723B1 (ko) | 진공 청소기 및 그 제어방법 | |
| RU2419376C1 (ru) | Пылесос и способ его управления | |
| KR101136618B1 (ko) | 진공 청소기의 제어방법 | |
| KR20100039984A (ko) | 진공 청소기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091026 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100401 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101005 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4625039 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131112 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |