JP2007155128A - モータアクチュエータ - Google Patents
モータアクチュエータ Download PDFInfo
- Publication number
- JP2007155128A JP2007155128A JP2006301344A JP2006301344A JP2007155128A JP 2007155128 A JP2007155128 A JP 2007155128A JP 2006301344 A JP2006301344 A JP 2006301344A JP 2006301344 A JP2006301344 A JP 2006301344A JP 2007155128 A JP2007155128 A JP 2007155128A
- Authority
- JP
- Japan
- Prior art keywords
- louver
- drive device
- support member
- end side
- transmission mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
【課題】支持部材の先端側で被駆動部材を回転させるとともに、支持部材自身についても揺動または直動させる場合でも、被駆動部材の不用意な動きを防止することのできるモータアクチュエータを提供すること。
【解決手段】ルーバ装置において、ルーバ支持部材22に揺動動作および直動動作を行わせる。また、ルーバ支持部材22の先端側でルーバ2を回転させるにあたって、ルーバ支持部材22の基端側に第3のステッピングモータ80を配置し、基端側のプーリ82と、先端側のプーリ85との間にタイミングベルトを掛け渡す。このため、歯車機構を用いた場合と違って、ルーバは、バックラッシュに起因する不用意な動きを行わない。
【選択図】図5
【解決手段】ルーバ装置において、ルーバ支持部材22に揺動動作および直動動作を行わせる。また、ルーバ支持部材22の先端側でルーバ2を回転させるにあたって、ルーバ支持部材22の基端側に第3のステッピングモータ80を配置し、基端側のプーリ82と、先端側のプーリ85との間にタイミングベルトを掛け渡す。このため、歯車機構を用いた場合と違って、ルーバは、バックラッシュに起因する不用意な動きを行わない。
【選択図】図5
Description
本発明は、支持部材を揺動または/および直動させるとともに、当該支持部材の先端側で被駆動部材を回転させるモータアクチュエータに関するものである。
エアコンや温風暖房器などの吹き出し口には、長手方向の複数箇所でルーバ支持部材に支持された状態にルーバが配置され、かかるルーバは、ステッピングモータなどにより回転駆動されて向きを切り換えるようになっている(例えば、特許文献1参照)。
特公平7−43024号公報
近年、エアコンなどではルーバの位置や姿勢をさらに複雑に制御して部屋全体に冷風や温風が均一に行き渡るようにすることが検討されている。このような構成を実現するには、先端側でルーバを回転可能に支持する支持部材に揺動動作または/および直動動作を行わせればよい。その際、直動用駆動装置、揺動用駆動装置、回転用駆動装置に歯車伝達機構を設けると、ルーバに風が当たった際などにおいて、歯車のバックラッシュの影響でルーバが不用意な動きを行うという問題点がある。
また、回転用駆動装置によって支持部材の先端でルーバを回転させるには、支持部材上における先端側にモータを配置すればよいが、支持部材自身を駆動する場合、先端側にモータを配置すると、支持部材の先端側に重心が位置し、支持部材に対する揺動用駆動装置または/および直動用駆動装置に過大な負荷がかかるという問題点がある。
以上の問題点に鑑みて、本発明の課題は、被駆動部材の不用意な動きを防止することのできるモータアクチュエータを提供することにある。
次に、本発明の課題は、支持部材の先端側で被駆動部材を回転させるとともに、支持部材自身についても揺動または直動させる場合でも、支持部材に対する駆動装置の負荷を軽減することのできるモータアクチュエータを提供することにある。
上記課題を解決するために、本発明に係るモータアクチュエータでは、支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を直動させる直動用駆動装置と、前記被駆動部材を回転させる回転用駆動装置とを有し、前記直動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とする。
本発明の別の形態に係るモータアクチュエータでは、支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を揺動させる揺動用駆動装置と、前記被駆動部材を回転させる回転用駆動装置とを有し、前記揺動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とする。
本発明のさらに別の形態に係るモータアクチュエータでは、支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を直動させる直動用駆動装置と、前記支持部材を駆動して前記被駆動部材を揺動させる揺動用駆動装置と、前記被駆動部材を回転駆動する回転用駆動装置とを有し、前記直動用駆動装置、前記揺動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とする。
本発明において、前記動力伝達機構は少なくとも前記回転用駆動装置に構成され、当該回転用駆動装置では、前記支持部材の基端側に搭載されたモータの回転出力が前記動力伝達機構を介して先端側に伝達されることが好ましい。揺動動作または/および直動動作を行う支持部材の先端側で被駆動部材を回転させるにあたって、支持部材の基端側にモータを配置すると、支持部材の重心が先端側に偏らないので、支持部材に対する揺動用駆動装置または/および直動用駆動装置に加わる負荷が小さい。それ故、揺動用駆動装置または/および直動用駆動装置に小型のモータを用いればよい。また、支持部材の基端側にモータを配置すると、被駆動部材までの距離が長くなるので、歯車列を用いると、バックラッシュの影響で被駆動部材が不用意な動きを行ってしまうが、本発明では、動力伝達機構としてベルト機構を用いたので、バックラッシュが発生せず、被駆動部材の不用意な動きを防止することができる。
本発明では、動力伝達機構にベルト機構を用いているため、バックラッシュが発生せず、被駆動部材の不用意な動きを防止することができる。
以下に、図面を参照して、本発明を適用したモータアクチュエータを説明する。
(全体構成)
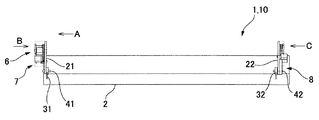
図1および図2は、本発明を適用したモータアクチュエータを備えたルーバ装置の斜視図および平面図である。図1および図2において、本形態のルーバ装置1は、所定の幅寸法をもって延びた板状のルーバ2と、このルーバ2の長手方向の3箇所でルーバ2を支持する複数のルーバ支持部材21、22とを有している。複数のルーバ支持部材21、22は、風の通路を遮らないようにルーバ2の長手方向と直交する板状であり、各々の先端部は、ルーバ2の上面で起立する連結板31、32を支軸41、42を介して回転可能に支持している。
図1および図2は、本発明を適用したモータアクチュエータを備えたルーバ装置の斜視図および平面図である。図1および図2において、本形態のルーバ装置1は、所定の幅寸法をもって延びた板状のルーバ2と、このルーバ2の長手方向の3箇所でルーバ2を支持する複数のルーバ支持部材21、22とを有している。複数のルーバ支持部材21、22は、風の通路を遮らないようにルーバ2の長手方向と直交する板状であり、各々の先端部は、ルーバ2の上面で起立する連結板31、32を支軸41、42を介して回転可能に支持している。
2つのルーバ支持部材21のうち、ルーバ支持部材21には、その基端側から先端側に向けてU字形状の切り欠き212が形成され、長さ方向の略中央部分には、長さ方向に長辺を向ける矩形穴211が形成されている。矩形穴211における上辺部にはラックが形成されている。これに対して、ルーバ支持部材22には、長さ方向の略中央部分にルーバ支持部材23の長さ方向に延びた長穴221が形成され、長穴221内にはガイドピン55が位置している。
(ルーバ駆動装置の構成)
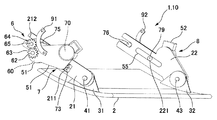
図3は、図1に示すルーバ装置の一方側端部に位置するルーバ支持部材周辺を抜き出して示す平面図である。図4(a)、(b)は、図1に示すルーバ装置を矢印Bで示す方向からみたときの説明図、および矢印Aで示す方向からみたときの説明図である。図5は、図1に示すルーバ装置を矢印Cで示す方向からみたときの説明図である。
図3は、図1に示すルーバ装置の一方側端部に位置するルーバ支持部材周辺を抜き出して示す平面図である。図4(a)、(b)は、図1に示すルーバ装置を矢印Bで示す方向からみたときの説明図、および矢印Aで示す方向からみたときの説明図である。図5は、図1に示すルーバ装置を矢印Cで示す方向からみたときの説明図である。
本形態のルーバ装置1は、ルーバ支持部材21の切り欠き212には支軸65が通っており、この支軸65にはピニオン64が固着されている。また、ピニオン64の近傍には、円弧状の公転扇ギア91が配置されており、公転扇ギア91はエアコン本体に両端部が固定されている。また、支軸65は、エアコン本体に対して軸線周りに回転可能、かつ、公転扇ギア91の円弧形状に沿って移動可能な状態にエアコン本体に支持されている。この状態で、公転扇ギア91の円弧部に形成された外歯にピニオン64が噛み合うので、ルーバ装置1はエアコン本体に保持された状態となる。
また、本形態のルーバ装置1には、第1のルーバ駆動装置6、第2のルーバ駆動装置7、および第3のルーバ駆動装置8を備えたモータアクチュエータ10が構成されている。
まず、図3および図4(a)、(b)において、第1のルーバ駆動装置6(揺動用駆動装置)は、ルーバ支持部材21におけるルーバ支持位置(支軸41を通る位置)から外れた位置を通る第1の軸線(図示せず)周りにルーバ2を公転させるためのものである。より具体的には、第1のルーバ駆動装置6は、ルーバ支持部材21の側方に配置されたモータケース51内に固定された第1のステッピングモータ60と、この第1のステッピングモータ60の出力軸62に固着されたピニオン63と、このピニオン63および公転扇ギア91に噛み合うピニオン64とを有している。
このため、第1のステッピングモータ60が作動すると、ルーバ支持部材21の側では、第1のステッピングモータ60の回転がピニオン63を介してピニオン64に伝達される結果、ピニオン64が公転扇ギア91の円弧面に沿って上下動するとともにU字形状の切り欠き212内の支軸65が上下動するので、第1のルーバ支持部材21の先端側が揺動する。かかる動作に従動して、ルーバ2が第1の軸線周りに双方向に公転する。
第2のルーバ駆動装置7(直動用駆動装置)は、ルーバ2をその長手方向と直交する方向で前進あるいは後退させるためのものである。より具体的には、第2のルーバ駆動装置7は、ルーバ支持部材21の側方に配置されたモータケース51内に固定された第2のステッピングモータ70と、この第2のステッピングモータ70の出力軸71に固着されたピニオン72と、このピニオン72および矩形穴211の上辺部に形成されたラックと噛み合うピニオン73とを有している。ここで、ラックはルーバ支持部材21の方に形成されている一方、ピニオン73はモータケース51の側に回転可能に支持されている。
このため、第2のステッピングモータ70が作動すると、ルーバ支持部材21の側では、第2のステッピングモータ70の回転がピニオン73およびラックに伝達される結果、第1のルーバ支持部材21は、その長手方向に前進あるいは後退する。かかる動作に従動して、ルーバ2がルーバ支持部材21の長手方向に前進あるいは後退する。
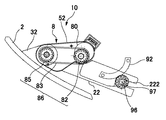
図5において、第3のルーバ駆動装置8(回転用駆動装置)は、ルーバ支持部材21、22上におけるルーバ支持位置(支軸41、42の位置)を通る第2の軸線(図示せず)周りにルーバ2を自転させるためのものである。より具体的には、第3のルーバ駆動装置8は、第2のルーバ支持部材22の基端側に固定されたモータケース52内に配置された第3のステッピングモータ80と、動力伝達機構86とを有しており、動力伝達機構86は、ステッピングモータ80の出力軸に固着されたプーリ82と、支軸42周りに回転可能な状態で連結板32に支持されたプーリ84と、プーリ82、84に掛け渡されたタイミングベルト83とを備えている。
このため、第3のステッピングモータ80が作動すると、ルーバ支持部材22の側において、第3のステッピングモータ80の回転が動力伝達機構86を介して連結板32に伝達される結果、ルーバ2は、支軸41、42、43を通る第2の軸線周りに双方向に回転する。
なお、ルーバ支持部材22では、ルーバ支持部材21の側の揺動や直動に追従できるように、長穴221内にはガイドピン55が位置しているとともに、基端側から先端側に向けてU字形状の切り欠き222が形成されている。また、切り欠き222には支軸96が通っており、この支軸96にはピニオン97が固着されている。また、ピニオン97の近傍には、円弧状の公転扇ギア92が配置されており、公転扇ギア92はエアコン本体に両端部が固定されている。また、支軸96は、エアコン本体に対して軸線周りに回転可能、かつ、公転扇ギア92の円弧形状に沿って移動可能な状態にエアコン本体に支持されている。
ここで、第1のルーバ駆動装置6、第2のルーバ駆動装置7、および第3のルーバ駆動装置8は各々が独立して制御される。このため、第1のルーバ駆動装置6および第2のルーバ駆動装置7を所定のタイミングで動作させれば、支軸41、42、43を所定の軌跡に沿って移動させることができる。
(本形態の主な効果)
以上説明したように、本形態では、第3のルーバ駆動装置8によって、揺動動作および直動動作を行うルーバ支持部材22の先端側でルーバ2を回転させるにあたって、ルーバ支持部材22の基端側にステッピングモータ80を配置している。このため、ルーバ支持部材22の重心が先端側に偏らないので、ルーバ支持部材21、22に対する第1のルーバ駆動装置6(揺動用駆動装置)および第2のルーバ駆動装置7(直動用駆動装置)に加わる負荷が小さい。それ故、第1のルーバ駆動装置6および第2のルーバ駆動装置7に用いるモータとしては、小型のステッピングモータ60、70を用いればよい。
以上説明したように、本形態では、第3のルーバ駆動装置8によって、揺動動作および直動動作を行うルーバ支持部材22の先端側でルーバ2を回転させるにあたって、ルーバ支持部材22の基端側にステッピングモータ80を配置している。このため、ルーバ支持部材22の重心が先端側に偏らないので、ルーバ支持部材21、22に対する第1のルーバ駆動装置6(揺動用駆動装置)および第2のルーバ駆動装置7(直動用駆動装置)に加わる負荷が小さい。それ故、第1のルーバ駆動装置6および第2のルーバ駆動装置7に用いるモータとしては、小型のステッピングモータ60、70を用いればよい。
また、ルーバ支持部材22の基端側にステッピングモータ80を配置すると、ルーバ2までの距離が長くなるので、歯車列を用いると、ルーバ2が風を受けた際にバックラッシュの影響でルーバ2が不用意な動きを行ってしまうが、本形態では、動力伝達機構86としてベルト機構を用いたので、バックラッシュが発生せず、ルーバ2の不用意な動きを防止することができる。
[その他の実施の形態]
上記実施の形態では、第1のルーバ駆動装置6(揺動用駆動装置)、第2のルーバ駆動装置7(直動用駆動装置)、および第3のルーバ駆動装置8(回転用駆動装置)のうち、第3のルーバ駆動装置8において、ベルト機構からなる動力伝達機構86を設けたが、例えば、図6に示すように、第1のルーバ駆動装置6(揺動用駆動装置)、および第2のルーバ駆動装置7(直動用駆動装置)でも、ベルト機構からなる動力伝達機構を用いてもよい。すなわち、第1のルーバ駆動装置6では、第1のステッピングモータ60の出力軸62にプーリ67を固着する一方、公転扇ギア91に噛み合うピニオン64と同軸状にプーリ69を構成し、これらのプーリ67、69間にタイミングベルト68を掛け渡す。また、第2のルーバ駆動装置7では、ステッピングモータ70の出力軸71にプーリ77を固着する一方、ラックと噛み合うピニオン73と同軸状にプーリ79を構成し、これらのプーリ間にタイミングベルト78を掛け渡す。
上記実施の形態では、第1のルーバ駆動装置6(揺動用駆動装置)、第2のルーバ駆動装置7(直動用駆動装置)、および第3のルーバ駆動装置8(回転用駆動装置)のうち、第3のルーバ駆動装置8において、ベルト機構からなる動力伝達機構86を設けたが、例えば、図6に示すように、第1のルーバ駆動装置6(揺動用駆動装置)、および第2のルーバ駆動装置7(直動用駆動装置)でも、ベルト機構からなる動力伝達機構を用いてもよい。すなわち、第1のルーバ駆動装置6では、第1のステッピングモータ60の出力軸62にプーリ67を固着する一方、公転扇ギア91に噛み合うピニオン64と同軸状にプーリ69を構成し、これらのプーリ67、69間にタイミングベルト68を掛け渡す。また、第2のルーバ駆動装置7では、ステッピングモータ70の出力軸71にプーリ77を固着する一方、ラックと噛み合うピニオン73と同軸状にプーリ79を構成し、これらのプーリ間にタイミングベルト78を掛け渡す。
1 ルーバ装置
2 ルーバ
6 第1のルーバ駆動装置(揺動用駆動装置)
7 第2のルーバ駆動装置(直動用駆動装置)
8 第3のルーバ駆動装置(回転用駆動装置)
10 モータアクチュエータ
21、22 ルーバ支持部材
60 第1のステッピングモータ
70 第2のステッピングモータ
80 第3のステッピングモータ
2 ルーバ
6 第1のルーバ駆動装置(揺動用駆動装置)
7 第2のルーバ駆動装置(直動用駆動装置)
8 第3のルーバ駆動装置(回転用駆動装置)
10 モータアクチュエータ
21、22 ルーバ支持部材
60 第1のステッピングモータ
70 第2のステッピングモータ
80 第3のステッピングモータ
Claims (4)
- 支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を直動させる直動用駆動装置と、前記被駆動部材を回転させる回転用駆動装置とを有し、
前記直動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とするモータアクチュエータ。 - 支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を揺動させる揺動用駆動装置と、前記被駆動部材を回転させる回転用駆動装置とを有し、
前記揺動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とするモータアクチュエータ。 - 支持部材と、該支持部材の先端側に回転可能に支持された被駆動部材と、前記支持部材を直動させる直動用駆動装置と、前記支持部材を駆動して前記被駆動部材を揺動させる揺動用駆動装置と、前記被駆動部材を回転駆動する回転用駆動装置とを有し、
前記直動用駆動装置、前記揺動用駆動装置および前記回転用駆動装置のうちの少なくとも一方は、2つのプーリ間にベルトが掛け渡された動力伝達機構を備えていることを特徴とするモータアクチュエータ。 - 請求項1ないし3のいずれかにおいて、
前記動力伝達機構は少なくとも前記回転用駆動装置に構成され、
当該回転用駆動装置では、前記支持部材の基端側に搭載されたモータの回転出力が前記動力伝達機構を介して先端側に伝達されることを特徴とするモータアクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006301344A JP2007155128A (ja) | 2005-11-08 | 2006-11-07 | モータアクチュエータ |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005323284 | 2005-11-08 | ||
| JP2006301344A JP2007155128A (ja) | 2005-11-08 | 2006-11-07 | モータアクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007155128A true JP2007155128A (ja) | 2007-06-21 |
Family
ID=38239753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006301344A Pending JP2007155128A (ja) | 2005-11-08 | 2006-11-07 | モータアクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007155128A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008122004A (ja) * | 2006-11-14 | 2008-05-29 | Matsushita Electric Ind Co Ltd | 空気調和機 |
| WO2010143378A1 (ja) * | 2009-06-12 | 2010-12-16 | ダイキン工業株式会社 | 空気調和機の室内機 |
| CN106247592A (zh) * | 2016-09-13 | 2016-12-21 | 珠海格力电器股份有限公司 | 壳体组件及具有其的空调器室内机 |
| CN106440304A (zh) * | 2016-09-14 | 2017-02-22 | 珠海格力电器股份有限公司 | 一种空调器进风口防尘机构及空调器 |
| CN106500293A (zh) * | 2016-12-16 | 2017-03-15 | 珠海格力电器股份有限公司 | 空调器及其导风板驱动装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH106267A (ja) * | 1996-06-20 | 1998-01-13 | Tokico Ltd | 工業用ロボット |
| JP2006064373A (ja) * | 2005-11-14 | 2006-03-09 | Matsushita Electric Ind Co Ltd | 空気調和機 |
-
2006
- 2006-11-07 JP JP2006301344A patent/JP2007155128A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH106267A (ja) * | 1996-06-20 | 1998-01-13 | Tokico Ltd | 工業用ロボット |
| JP2006064373A (ja) * | 2005-11-14 | 2006-03-09 | Matsushita Electric Ind Co Ltd | 空気調和機 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008122004A (ja) * | 2006-11-14 | 2008-05-29 | Matsushita Electric Ind Co Ltd | 空気調和機 |
| JP4706620B2 (ja) * | 2006-11-14 | 2011-06-22 | パナソニック株式会社 | 空気調和機 |
| WO2010143378A1 (ja) * | 2009-06-12 | 2010-12-16 | ダイキン工業株式会社 | 空気調和機の室内機 |
| CN106247592A (zh) * | 2016-09-13 | 2016-12-21 | 珠海格力电器股份有限公司 | 壳体组件及具有其的空调器室内机 |
| CN106440304A (zh) * | 2016-09-14 | 2017-02-22 | 珠海格力电器股份有限公司 | 一种空调器进风口防尘机构及空调器 |
| CN106500293A (zh) * | 2016-12-16 | 2017-03-15 | 珠海格力电器股份有限公司 | 空调器及其导风板驱动装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005288590A (ja) | 多関節型マニピュレータ | |
| CN100515690C (zh) | 用于电动工具的模式选择机构和具有这种机构的电动工具 | |
| JP2007155128A (ja) | モータアクチュエータ | |
| CN100406178C (zh) | 一种线锯及用于线锯输出轴的支撑组件 | |
| JP2009210207A (ja) | ルーバ装置 | |
| JP6506324B2 (ja) | 水平多関節型ロボットとその設置反転方法 | |
| JP2002326181A (ja) | アーム動作機構およびこれを備えた産業用ロボット | |
| JP6110620B2 (ja) | パラレルリンクロボット | |
| JP6659035B2 (ja) | 多方向駆動装置及び自動カメラ | |
| JP5298667B2 (ja) | 空気調和機 | |
| JP2019528147A5 (ja) | 手術器具および手術器具システム | |
| JP2014211116A (ja) | 扇風機の首振り機構 | |
| JP2013227951A (ja) | 扇風機 | |
| JP2003305681A (ja) | ロボットハンド | |
| JP2007228688A (ja) | アクチュエータ | |
| JP2008256011A (ja) | 傘歯車を用いた同心2軸機構 | |
| JP2007218577A (ja) | アクチュエータ | |
| JP2006341336A (ja) | ロボットアーム | |
| JP2008005579A (ja) | 電動ロータリアクチュエータ | |
| JP6568381B2 (ja) | 多方向より動力を取り出すことができるギヤ機構およびハンド機構 | |
| JPH10217158A (ja) | ロボツト装置 | |
| JP2001215395A (ja) | レンズ駆動機構 | |
| JP2004337994A (ja) | マニピュレータおよび回転関節機構 | |
| JPH09300269A (ja) | 多関節ロボットの手首機構 | |
| JP2017155740A (ja) | 送風装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20090126 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A02 | Decision of refusal |
Effective date: 20111108 Free format text: JAPANESE INTERMEDIATE CODE: A02 |