JP2006304599A - 車両の回生制動制御装置 - Google Patents
車両の回生制動制御装置 Download PDFInfo
- Publication number
- JP2006304599A JP2006304599A JP2006175911A JP2006175911A JP2006304599A JP 2006304599 A JP2006304599 A JP 2006304599A JP 2006175911 A JP2006175911 A JP 2006175911A JP 2006175911 A JP2006175911 A JP 2006175911A JP 2006304599 A JP2006304599 A JP 2006304599A
- Authority
- JP
- Japan
- Prior art keywords
- regenerative braking
- vehicle
- wheel
- torque
- slipping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
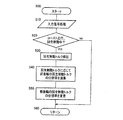
【解決手段】発生している回生制動トルクを検出する手段と、回生制動トルクの前輪と後輪の分担率を変更する手段と、車両の車輪がスリップをしているか否かを検出する手段とを備え、車輪がスリップしていると検出されたときは、前輪と後輪の回生制動トルクの分担率を変更する(図2のステップ630、ステップ640第3実施形態)。
【選択図】図2
Description
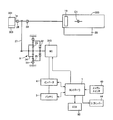
5…バッテリ
42…シフトポジションセンサ
124…ロックアップクラッチ
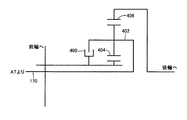
301…エンジン
302…フロントペラシャフト
303…第1のモータジェネレータ
304…フロントデフ
306…トランスファ
308…リアペラシャフト
310…第2のモータジェネレータ
312…トルクコンバータ
330…自動変速機
400…センターデフクラッチ
R1…歯車変速機部
Claims (6)
- 車両の制動を行うときに車両の運動エネルギを他のエネルギに変換することで回生制動可能に構成された車両の回生制動制御装置において、
前記車両の前輪と後輪の両方に回生制動トルクが伝達されるようにすると共に、
前記回生制動が行われている際に、発生している回生制動トルクを検出する手段と、
該回生制動トルクの前輪と後輪の分担率を変更する手段と、
前記車両の車輪がスリップをしているか否かを検出する手段と、を備え、
該車輪がスリップしていると検出されたときは、前輪と後輪の回生制動トルクの分担率を変更する
ことを特徴とする車両の回生制動制御装置。 - 請求項1において、
前記検出された車輪のスリップ量に応じて前輪と後輪の回生制動トルクの分担率を変更する
ことを特徴とする車両の回生制動制御装置。 - 請求項1において、さらに、前輪と後輪の回生制動における分担率が所定の変更上限値を超えたか否かを検出する手段を備え、
前記回生制動トルクが該変更上限値を超えた場合は、回生制動トルクを減らす
ことを特徴とする車両の回生制動制御装置。 - 車両の駆動と、車両の制動時に車両の運動エネルギを電気エネルギに変換して回生制動とが行えるモータジェネレータを備え、該モータジェネレータが変速機を介して車輪に連結された車両の回生制動制御装置において、
前記車輪がスリップをしているか否かを検出する手段を備え、
該車輪がスリップしていると判断されたときには、前記変速機の変速比を高速比側に変更する
ことを特徴とする車両の回生制動制御装置。 - 車両の駆動と、車両の制動時に車両の運動エネルギを電気エネルギに変換して回生制動とが行えるモータジェネレータを備えた車両の回生制動制御装置において、
前記車輪がスリップをしているか否かを検出する手段を備え、
該車輪がスリップしていると判断されたときには、前記モータジェネレータ以外の駆動源のトルクを増加させ、回生制動トルクを減少させる
ことを特徴とする車両の回生制動制御装置。 - 車両の駆動と、車両の制動時に車両の運動エネルギを電気エネルギに変換して回生制動とが行えるモータジェネレータを備え、該モータジェネレータが変速機を介して車輪に連結された車両の回生制動制御装置において、
前記変速機がロックアップクラッチ付きのトルクコンバータを有するものであって、
前記車輪がスリップをしているか否かを判断する手段を備え、
該車輪がスリップしていると判断されたときには、前記トルクコンバータのロックアップクラッチを半係合又は非係合状態にする
ことを特徴とする車両の回生制動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006175911A JP4367443B2 (ja) | 2006-06-26 | 2006-06-26 | 車両の回生制動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006175911A JP4367443B2 (ja) | 2006-06-26 | 2006-06-26 | 車両の回生制動制御装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP33460498A Division JP3951480B2 (ja) | 1998-11-25 | 1998-11-25 | 車両の回生制動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006304599A true JP2006304599A (ja) | 2006-11-02 |
| JP4367443B2 JP4367443B2 (ja) | 2009-11-18 |
Family
ID=37472220
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006175911A Expired - Fee Related JP4367443B2 (ja) | 2006-06-26 | 2006-06-26 | 車両の回生制動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4367443B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014080696A1 (ja) | 2012-11-21 | 2014-05-30 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| US9043063B2 (en) | 2012-12-31 | 2015-05-26 | Hyundai Motor Company | Anti-nose down torque control system and method for vehicle |
| JP2016130118A (ja) * | 2015-01-15 | 2016-07-21 | トヨタ自動車株式会社 | 車両の駆動装置 |
| CN106523167A (zh) * | 2015-09-12 | 2017-03-22 | 通用汽车环球科技运作有限责任公司 | 计算发动机扭矩请求值的车辆、系统和方法 |
| US9656652B2 (en) | 2013-09-30 | 2017-05-23 | Hyundai Motor Company | Method for controlling regenerative braking of vehicle |
| JP2020168971A (ja) * | 2019-04-04 | 2020-10-15 | スズキ株式会社 | ハイブリッド車両 |
| KR20230133074A (ko) | 2022-03-10 | 2023-09-19 | 에이치엘만도 주식회사 | 회생 제동 시스템 및 그 제어방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6390440A (ja) * | 1986-10-01 | 1988-04-21 | Toyota Motor Corp | 車両用4輪駆動装置 |
| JPH02271160A (ja) * | 1989-04-12 | 1990-11-06 | Mazda Motor Corp | 自動変速機のロックアップクラッチ制御装置 |
| JPH07250402A (ja) * | 1994-03-11 | 1995-09-26 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH08237806A (ja) * | 1994-12-01 | 1996-09-13 | Toyota Motor Corp | 複合電気自動車 |
| JPH09308004A (ja) * | 1996-05-15 | 1997-11-28 | Honda Motor Co Ltd | 電動車両の制動装置 |
| JPH10295004A (ja) * | 1997-04-18 | 1998-11-04 | Toyota Motor Corp | 電気自動車用駆動制御装置 |
-
2006
- 2006-06-26 JP JP2006175911A patent/JP4367443B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6390440A (ja) * | 1986-10-01 | 1988-04-21 | Toyota Motor Corp | 車両用4輪駆動装置 |
| JPH02271160A (ja) * | 1989-04-12 | 1990-11-06 | Mazda Motor Corp | 自動変速機のロックアップクラッチ制御装置 |
| JPH07250402A (ja) * | 1994-03-11 | 1995-09-26 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH08237806A (ja) * | 1994-12-01 | 1996-09-13 | Toyota Motor Corp | 複合電気自動車 |
| JPH09308004A (ja) * | 1996-05-15 | 1997-11-28 | Honda Motor Co Ltd | 電動車両の制動装置 |
| JPH10295004A (ja) * | 1997-04-18 | 1998-11-04 | Toyota Motor Corp | 電気自動車用駆動制御装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014080696A1 (ja) | 2012-11-21 | 2014-05-30 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| US9573473B2 (en) | 2012-11-21 | 2017-02-21 | Hitachi Automotive Systems, Ltd. | Vehicle control device |
| US9043063B2 (en) | 2012-12-31 | 2015-05-26 | Hyundai Motor Company | Anti-nose down torque control system and method for vehicle |
| US9656652B2 (en) | 2013-09-30 | 2017-05-23 | Hyundai Motor Company | Method for controlling regenerative braking of vehicle |
| US10363821B2 (en) | 2013-09-30 | 2019-07-30 | Hyundai Motor Company | Method for controlling regenerative braking of vehicle |
| JP2016130118A (ja) * | 2015-01-15 | 2016-07-21 | トヨタ自動車株式会社 | 車両の駆動装置 |
| CN106523167A (zh) * | 2015-09-12 | 2017-03-22 | 通用汽车环球科技运作有限责任公司 | 计算发动机扭矩请求值的车辆、系统和方法 |
| JP2020168971A (ja) * | 2019-04-04 | 2020-10-15 | スズキ株式会社 | ハイブリッド車両 |
| JP7302242B2 (ja) | 2019-04-04 | 2023-07-04 | スズキ株式会社 | ハイブリッド車両 |
| KR20230133074A (ko) | 2022-03-10 | 2023-09-19 | 에이치엘만도 주식회사 | 회생 제동 시스템 및 그 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4367443B2 (ja) | 2009-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3951480B2 (ja) | 車両の回生制動制御装置 | |
| US7708095B2 (en) | Control apparatus and method for hybrid vehicle | |
| JP3893778B2 (ja) | ロックアップクラッチ制御装置 | |
| JP5233327B2 (ja) | 車両用駆動装置の制御装置 | |
| US7017348B2 (en) | Control device for a hybrid vehicle | |
| JP4367443B2 (ja) | 車両の回生制動制御装置 | |
| JP2002213266A (ja) | 車両の駆動力制御装置 | |
| JP3921218B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2004224110A (ja) | ハイブリッド車両の回生発電制御装置 | |
| JP4095059B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2010143308A (ja) | 車両の駆動トルク制御装置 | |
| JP5381873B2 (ja) | 車両制御システム | |
| JP4765945B2 (ja) | ロックアップクラッチ制御装置 | |
| JP5282758B2 (ja) | 充電制御システム | |
| JP2008298145A (ja) | 自動変速機のロックアップクラッチ制御装置 | |
| JP5630205B2 (ja) | オートマチックトランスミッション制御装置 | |
| JP5401967B2 (ja) | 電動車両の駆動輪ロック防止装置 | |
| JP4055804B2 (ja) | ロックアップクラッチ制御装置 | |
| JP4449825B2 (ja) | ハイブリッド車両の走行モード制御装置 | |
| JP4367444B2 (ja) | 車両の回生制動制御装置 | |
| US9919700B2 (en) | Vehicle control device | |
| JP2000166023A (ja) | ハイブリッド車のモ―タジェネレ―タ制御装置 | |
| JP3952651B2 (ja) | 車両の減速制御装置 | |
| US20160325751A1 (en) | Vehicle control device and transmission apparatus control device | |
| JP5807590B2 (ja) | ハイブリッド車両用自動変速機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090526 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090619 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090817 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120904 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130904 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |