JP2006292007A - 自動変速機制御装置 - Google Patents
自動変速機制御装置 Download PDFInfo
- Publication number
- JP2006292007A JP2006292007A JP2005110736A JP2005110736A JP2006292007A JP 2006292007 A JP2006292007 A JP 2006292007A JP 2005110736 A JP2005110736 A JP 2005110736A JP 2005110736 A JP2005110736 A JP 2005110736A JP 2006292007 A JP2006292007 A JP 2006292007A
- Authority
- JP
- Japan
- Prior art keywords
- hydraulic pressure
- friction element
- standby
- control device
- automatic transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 48
- 239000012530 fluid Substances 0.000 claims description 15
- 230000001050 lubricating effect Effects 0.000 claims description 6
- 230000007613 environmental effect Effects 0.000 claims description 4
- 230000004044 response Effects 0.000 abstract description 7
- 230000002708 enhancing effect Effects 0.000 abstract 1
- 239000007788 liquid Substances 0.000 abstract 1
- 239000003921 oil Substances 0.000 description 65
- 230000008859 change Effects 0.000 description 13
- 238000000034 method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 12
- 238000001514 detection method Methods 0.000 description 11
- 239000010720 hydraulic oil Substances 0.000 description 10
- 239000010687 lubricating oil Substances 0.000 description 5
- 230000009471 action Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000010349 pulsation Effects 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/06—Smoothing ratio shift by controlling rate of change of fluid pressure
- F16H61/061—Smoothing ratio shift by controlling rate of change of fluid pressure using electric control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H2059/683—Sensing pressure in control systems or in fluid controlled devices, e.g. by pressure sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0206—Layout of electro-hydraulic control circuits, e.g. arrangement of valves
- F16H2061/0209—Layout of electro-hydraulic control circuits, e.g. arrangement of valves with independent solenoid valves modulating the pressure individually for each clutch or brake
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/06—Smoothing ratio shift by controlling rate of change of fluid pressure
- F16H61/061—Smoothing ratio shift by controlling rate of change of fluid pressure using electric control means
- F16H2061/062—Smoothing ratio shift by controlling rate of change of fluid pressure using electric control means for controlling filling of clutches or brake servos, e.g. fill time, fill level or pressure during filling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0206—Layout of electro-hydraulic control circuits, e.g. arrangement of valves
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】 変速レスポンスを高める自動変速機制御装置を提供する。
【解決手段】 自動変速機1の複数の摩擦要素2a〜2eのうち次の変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を、当該次の変速に備えて待機させる待機摩擦要素として選択する。そして、待機摩擦要素がトルク伝達しない範囲で待機摩擦要素の駆動用ピストン8をストロークさせる待機液圧を、次の変速に先立って待機摩擦要素の駆動用ピストン8へ印加する。
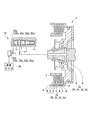
【選択図】 図1
【解決手段】 自動変速機1の複数の摩擦要素2a〜2eのうち次の変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を、当該次の変速に備えて待機させる待機摩擦要素として選択する。そして、待機摩擦要素がトルク伝達しない範囲で待機摩擦要素の駆動用ピストン8をストロークさせる待機液圧を、次の変速に先立って待機摩擦要素の駆動用ピストン8へ印加する。
【選択図】 図1
Description
本発明は、自動変速機の摩擦要素を駆動するピストンへ作動流体の液圧を印加して当該摩擦要素の解放及び締結を制御する自動変速機制御装置に関する。
上記液圧制御式の自動変速機制御装置では、クラッチ、ブレーキ等の摩擦要素の解放状態において当該摩擦要素の駆動用ピストンへ液圧を作用させるピストン室が空状態となる。この状態から摩擦要素を締結させる変速を行う場合、ピストン室へ作動流体を供給してピストンをストロークさせることになるが、この場合、作動流体がピストン室へ充填されるまでピストンをストロークさせることができないため、締結に時間がかかってしまう。そこで、ピストンへの印加液圧の時間増大率を大きくして摩擦要素の締結時間を短くしようとすると、変速ショックが大きくなるため、変速フィーリングが悪化してしまう。
このような問題に対処すべく特許文献1に開示の制御装置では、変速前にピストンがストロークしない程度の極低圧の油圧をクラッチへ印加するようにしている。即ちこの制御装置では、次の変速に先立って作動油をピストン室へ充填させておくことができるため、ピストンへの印加油圧を急増させなくても締結時間の短縮を図ることが可能になる。
しかし、特許文献1に開示の制御装置では、変速前におけるピストンへの印加油圧をピストンがストロークしない程度としているため、実際に変速が開始されてからクラッチが締結してトルク伝達を実現するまでには、ピストンがストロークする分、時間がかかる。これにより締結時間の短縮、ひいては変速時間の短縮には限界が生じるので、高変速レスポンスという近年の要求に対して十分に応えられず、このことが良好な変速フィーリングを得る上での妨げとなっている。
そこで、本発明の目的は、変速フィーリングを向上する自動変速機制御装置を提供することにある。
そこで、本発明の目的は、変速フィーリングを向上する自動変速機制御装置を提供することにある。
請求項1に記載の発明によると、複数の摩擦要素のうち次の変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を、当該次の変速に備えて待機させる待機摩擦要素として選択する。そして、待機摩擦要素がトルク伝達しない範囲で待機摩擦要素の駆動用ピストンをストロークさせる待機液圧を、次の変速に先立って待機摩擦要素の駆動用ピストンへ印加する。こうして待機液圧が待機摩擦要素の駆動用ピストンへ印加されている状態では、駆動用ピストンへ液圧を作用させるピストン室が作動流体の充填状態となり、しかも駆動用ピストンが待機摩擦要素にトルク伝達を実現させる手前の位置までストロークした状態となる。これにより、次の変速が実際に開始されてから待機摩擦要素が締結してトルク伝達を実現するまでに駆動用ピストンがストロークする距離が短くなるので、当該次の変速時における待機摩擦要素の締結時間も短くなる。したがって、請求項1に記載の発明によれば、変速時に締結側へ駆動する摩擦要素への印加油圧について時間増大率を可及的に低く抑えたとしても、変速時間を短縮して変速レスポンスを高めることができるので、変速フィーリングが向上する。
請求項2に記載の発明によると、待機摩擦要素の駆動用ピストンへの印加液圧を検出手段により検出し、当該検出手段による検出液圧に基づいて待機液圧を調整するので、待機液圧の正確な調整が可能となる。
請求項2に記載の発明によると、待機摩擦要素の駆動用ピストンへの印加液圧を検出手段により検出し、当該検出手段による検出液圧に基づいて待機液圧を調整するので、待機液圧の正確な調整が可能となる。
待機摩擦要素の駆動用ピストンへ液圧を作用させるピストン室に作動流体が充填された後、駆動用ピストンへの印加液圧が増大すると、駆動用ピストンがストロークを開始する。そして、ストロークした駆動用ピストンが待機摩擦要素に当接すると、当該待機摩擦要素によって駆動用ピストンが一時的に係止されるため、駆動用ピストンへの印加液圧の増大に伴って検出手段による検出液圧が急増する。即ち、検出液圧にオーバーシュート現象が現れる。この後、印加液圧のさらなる増大により駆動用ピストンが待機摩擦要素を押し動かしてストロークを再開すると、検出液圧は一旦急減した後に印加液圧に追従して増大するため、待機摩擦要素が締結してトルク伝達を実現するようになる。こうした事象を考慮して請求項3に記載の発明によると、検出手段による検出液圧に現れるオーバーシュート現象を検知するまで待機摩擦要素の駆動用ピストンへの印加液圧を増大し、当該オーバーシュート現象を検知した場合に駆動用ピストンへの印加液圧を保持して待機液圧とする。これにより、待機摩擦要素がトルク伝達を実現する範囲の液圧が駆動用ピストンへ印加される直前に、駆動用ピストンへの印加液圧がその増大を止められて待機液圧に保持される。したがって、次の変速前に待機摩擦要素がトルク伝達を実現する事態を防止しつつ、高い変速レスポンスを達成することができる。
検出油圧に現れるオーバーシュート現象が進むことにより駆動用ピストンへの印加液圧が高圧となった場合、待機摩擦要素を潤滑する潤滑流体の粘度によっては、駆動用ピストンがストロークを再開する前であっても待機摩擦要素がトルク伝達を開始するおそれがある。ここで潤滑流体の粘度は、当該潤滑流体の温度に依存して変化する。こうした事象を考慮して請求項4に記載の発明によると、オーバーシュート現象を検知したときの検出手段による検出液圧を基準液圧とし、摩擦要素を潤滑する潤滑流体の温度に基づいて補正した基準液圧を待機液圧とする。これにより、例えば潤滑流体の温度に応じて待機摩擦要素がトルク伝達しない液圧に基準液圧を補正することで、待機摩擦要素が誤ってトルク伝達する事態を確実に防止することができる。
請求項5に記載の発明によると、検出手段による検出液圧の時間増大率が閾値以上となった場合にオーバーシュート現象を検知したと判断する。これにより、検出液圧が急増するオーバーシュート現象が現れた否かについて、換言すれば待機摩擦要素がトルク伝達を実現する範囲の液圧が駆動用ピストンへ印加される直前であるか否かについて、正確に検知することができる。
自動変速機制御装置による変速制御は一般に、車両関連情報に基づいて行われる。そこで、請求項6に記載の発明によると、車両関連情報に基づいて次の変速を予測するので、当該予測精度は高くなる。しかも、このように予測される変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を待機摩擦要素として選択するので、当該選択精度も高くなる。
尚、車両関連情報としては、例えば請求項7に記載の発明のように、車両状態を表す車両状態情報と、車両の走行環境の状態を表す環境状態情報と、車両の運転者の運転傾向を表す運転傾向情報とのうち少なくとも一つの情報を含むものであることが望ましい。ここで車両状態情報とは、例えば自動変速機のレンジ及び変速段、車速、車輪速、車両姿勢、エンジン回転数等である。また、環境状態情報とは、例えば現在走行路や今後の走行が予測される経路に関する道路情報等である。さらにまた、運転者傾向情報とは、例えばアクセル傾向、ブレーキ傾向、変速傾向等である。
以下、本発明の複数の実施形態を図面に基づいて説明する。
(第一実施形態)
図2は、本発明の第一実施形態による自動変速機制御装置(以下、「自動変速機」を「AT」という)10を示している。AT制御装置10は、ステアシフト付AT1の制御装置として車両に搭載されている。尚、ステアシフト付AT1とは、車両のステアリングに設けられたステアスイッチの操作に従うステアシフトモードと、ステアスイッチの操作とは無関係に自動変速を実現する通常モードのいずれかを選択可能にしたATをいう。
(第一実施形態)
図2は、本発明の第一実施形態による自動変速機制御装置(以下、「自動変速機」を「AT」という)10を示している。AT制御装置10は、ステアシフト付AT1の制御装置として車両に搭載されている。尚、ステアシフト付AT1とは、車両のステアリングに設けられたステアスイッチの操作に従うステアシフトモードと、ステアスイッチの操作とは無関係に自動変速を実現する通常モードのいずれかを選択可能にしたATをいう。
まず、AT1について説明する。
AT1は、摩擦要素2a〜2e及び駆動部3a〜3eを備えている。摩擦要素2a〜2eは、駆動部3a〜3eのうち符号の末尾のアルファが同じ摩擦要素と対応しており、当該対応摩擦要素によって駆動される。各摩擦要素2a〜2eはクラッチ又はブレーキであり、例えば図1に示すように入力摩擦板4と出力摩擦板5とから構成されている。ここで入力摩擦板4は、車両のエンジン側からトルクが入力される入力軸6に軸方向(図1の左右方向)へ相対移動可能に装着されており、出力摩擦板5は、車両の駆動輪側へトルクを出力する出力軸7に軸方向へ相対移動可能に装着されている。摩擦板4,5は、AT制御装置10から供給される作動油により潤滑された状態で互いに摩擦接触可能であり、当該摩擦接触により入力軸6のトルクを出力軸7へと伝達する。各駆動部3a〜3eは、ピストン8とピストン室9とから構成されている。ピストン8には、AT制御装置10からピストン室9へ供給される作動油の内圧が印加される。ピストン8は、この印加油圧に応じて軸方向へストローク可能となっている。
AT1は、摩擦要素2a〜2e及び駆動部3a〜3eを備えている。摩擦要素2a〜2eは、駆動部3a〜3eのうち符号の末尾のアルファが同じ摩擦要素と対応しており、当該対応摩擦要素によって駆動される。各摩擦要素2a〜2eはクラッチ又はブレーキであり、例えば図1に示すように入力摩擦板4と出力摩擦板5とから構成されている。ここで入力摩擦板4は、車両のエンジン側からトルクが入力される入力軸6に軸方向(図1の左右方向)へ相対移動可能に装着されており、出力摩擦板5は、車両の駆動輪側へトルクを出力する出力軸7に軸方向へ相対移動可能に装着されている。摩擦板4,5は、AT制御装置10から供給される作動油により潤滑された状態で互いに摩擦接触可能であり、当該摩擦接触により入力軸6のトルクを出力軸7へと伝達する。各駆動部3a〜3eは、ピストン8とピストン室9とから構成されている。ピストン8には、AT制御装置10からピストン室9へ供給される作動油の内圧が印加される。ピストン8は、この印加油圧に応じて軸方向へストローク可能となっている。
各駆動部3a〜3eでは、図1に示すようにピストン室9に作動油が充填されていないとき、ピストン8はストロークせず、対応する摩擦要素2a〜2eの直近の入力摩擦板4との間に隙間δをあけた状態となる。このとき摩擦板4,5は互いに離間するため、対応摩擦要素2a〜2eは入力軸6から出力軸7へのトルク伝達を遮断する解放状態となる。
各駆動部3a〜3eでは、ピストン室9に作動油が充填されて当該作動油の内圧、即ちピストン8への印加油圧が増大すると、図3(A)に示すようにピストン8が入力摩擦板4側へストロークを開始する。
各駆動部3a〜3eでは、ピストン室9に作動油が充填されて当該作動油の内圧、即ちピストン8への印加油圧が増大すると、図3(A)に示すようにピストン8が入力摩擦板4側へストロークを開始する。
各駆動部3a〜3eでは、上記隙間δ分、ピストン8がストロークすると、図3(B)に示すようにピストン8が直近の入力摩擦板4に当接し、当該入力摩擦板4によって一旦係止される。
各駆動部3a〜3eでは、入力摩擦板4により係止されたピストン8への印加油圧がさらに増大すると、図3(C)に示すようにピストン8が摩擦要素2a〜2eを押し動かしてストロークを再開する。その結果、摩擦板4,5が互いに摩擦接触させられるため、対応摩擦要素2a〜2eは入力軸6から出力軸7へトルク伝達する完全締結状態となる。
各駆動部3a〜3eでは、入力摩擦板4により係止されたピストン8への印加油圧がさらに増大すると、図3(C)に示すようにピストン8が摩擦要素2a〜2eを押し動かしてストロークを再開する。その結果、摩擦板4,5が互いに摩擦接触させられるため、対応摩擦要素2a〜2eは入力軸6から出力軸7へトルク伝達する完全締結状態となる。
AT1では、非走行レンジである駐車(P)レンジ及び中立(N)レンジと、走行レンジである前進(D)レンジ及び後進(R)レンジとがレンジとして用意されている。また、AT1では、DレンジにおけるAT1の変速段が6段用意されている。これらAT1のレンジ及び変速段は、図4に示すように摩擦要素2a〜2eの締結及び解放の組み合わせを変化させることで、切り換えることができる。尚、図4において「○」は、該当するレンジ及び変速段が実現されるとき完全締結する摩擦要素を示している。
次に、AT制御装置10について説明する。
図2に示すようにAT制御装置10は、オイルポンプ20、電磁弁22a〜22e、モジュレータ弁24、マニュアル弁26、圧力制御弁28a〜28e、油圧センサ30a〜30e、油温センサ32、変速電子制御ユニット(以下、「電子制御ユニット」をECUという)36等を備えている。
オイルポンプ20は機械式又は電動式のポンプであり、油路11とオイルパン(図示しない)とに接続されている。オイルポンプ20は、オイルパンから吸入した作動油を油路11へ吐出することで、ライン圧を生成する。
図2に示すようにAT制御装置10は、オイルポンプ20、電磁弁22a〜22e、モジュレータ弁24、マニュアル弁26、圧力制御弁28a〜28e、油圧センサ30a〜30e、油温センサ32、変速電子制御ユニット(以下、「電子制御ユニット」をECUという)36等を備えている。
オイルポンプ20は機械式又は電動式のポンプであり、油路11とオイルパン(図示しない)とに接続されている。オイルポンプ20は、オイルパンから吸入した作動油を油路11へ吐出することで、ライン圧を生成する。
電磁弁22a〜22eは、共通の変速ECU36に電気的に接続されている。電磁弁22a〜22eは、それぞれ変速ECU36から入力される指令値に比例した油圧に指令圧を調整して、当該指令圧を出力する。ここで入力指令値は、例えば指令デューティ比、指令電流等である。モジュレータ弁24は、油路11から分岐する油路11aに接続されていると共に、それぞれ油路12a〜12eを介して電磁弁22a〜22eに接続されている。モジュレータ弁24は、電磁弁22a〜22eの指令圧の元圧をライン圧よりも低いモジュレート圧に調整する。
マニュアル弁26は、車両のシフトレバーの操作に応じて機械的又は電気的に駆動されるスプール弁であり、油路11,14,15dに接続されている。マニュアル弁26は、シフトレバーによって選択されたレンジに従って油路11と油路14,15dとの連通状態を切り換える。具体的には、Pレンジ又はNレンジが選択されるときマニュアル弁26は、油路14,15dの双方を油路11と非連通にする。また、Dレンジが選択されるときマニュアル弁26は、油路14のみを油路11に連通させて油路11のライン圧を油路14へと供給する。さらにまた、Rレンジが選択されるときマニュアル弁26は、油路15dのみを油路11に連通させて油路11のライン圧を油路15dへと供給する。
圧力制御弁28a〜28cは、油路14から分岐する油路14a〜14cにそれぞれ接続されており、圧力制御弁28dは油路15dに接続されており、圧力制御弁28eは、油路11から分岐する油路11eに接続されている。圧力制御弁28a〜28eは、それぞれ対応する電磁弁22a〜22eに油路16a〜16eを介して接続されていると共に、それぞれ対応する駆動部3a〜3eのピストン室9に油路17a〜17eを介して接続されている。圧力制御弁28a〜28eは、対応油路14a〜14c,15d,11eの油圧を元圧として、対応駆動部3a〜3eのピストン8への印加油圧を、対応電磁弁22a〜22eからの供給指令圧に比例した油圧に調整する。尚、本実施形態では、後述するオーバーシュート現象の検知のため、各圧力制御弁28a〜28eと対応駆動部3a〜3eとの間の油路17a〜17eや、各圧力制御弁28a〜28eと対応電磁弁22a〜22eとの間の油路16a〜16eには、油圧脈動を防止するダンパを設けないようにすることが望ましい。
油圧センサ30a〜30eは、それぞれ油路17a〜17eに接続されていると共に、共通の変速ECU36に電気的に接続されている。油圧センサ30a〜30eは、対応油路17a〜17eの上流側の圧力制御弁28a〜28eにより下流側の駆動部3a〜3eのピストン8へと印加される油圧を検出し、当該検出油圧を表す検出信号を変速ECU36へ出力する。
油温センサ32は、作動油を摩擦要素2a〜2eの潤滑油としてAT1へ供給する油路18に接続されていると共に、変速ECU36に電気的に接続されている。油温センサ32は、摩擦要素2a〜2eの潤滑油の温度を検出して、当該検出油温を表す検出信号を変速ECU36へ出力する。尚、油路18上には、AT1への潤滑油の供給量を調整する弁装置40が配置されている。
変速ECU36は、マイクロコンピュータを主体に構成されている。変速ECU36は、メモリに記憶された制御プログラムをCPUにより実行することで、油圧センサ30a〜30eの検出油圧、油温センサ32の検出油温、並びにその他の車両関連情報に基づき電磁弁22a〜22eへの入力指令値を決定する。ここで車両関連情報とは、車両状態を表す車両状態情報、車両の走行環境の状態を表す環境状態情報、車両の運転者の運転傾向を表す運転傾向情報である。そして特に本実施形態では、AT1のレンジ及び変速段並びに車速が車両状態情報として利用され、現在走行路及び今後の走行が予測される経路(以下、「今後の走行が予測される経路」を「予測経路」という)に関する道路情報が環境状態情報として利用され、運転者の過去のアクセル傾向が運転傾向情報として利用される。尚、AT1のレンジは、例えばシフトレバーによる選択レンジを検出することによって得られるものであってもよいし、油圧センサ30a〜30eによる検出油圧に基づいて算出されるものであってもよい。AT1の変速段は、例えば油圧センサ30a〜30eによる検出油圧に基づいて算出されるものであってもよいし、ステアシフトのオン時には車両のステアシフトスイッチによる選択変速段を検出することによって得られるものであってもよい。車速は、例えば車輪速の検出結果に基づいて算出されるものである。道路情報は、例えば車両に搭載されたナビゲーションシステムを通じて得られるものであってもよいし、当該情報が現在走行路の状態を表す場合、車輪速やジャイロ角等を検出することによって得られるものであってもよい。アクセル傾向は、例えば過去のアクセル開度を所定のECUにより逐次学習することによって得られるものである。
このように変速ECU36が決定する電磁弁22a〜22eへの入力指令値に従って、電磁弁22a〜22eから圧力制御弁28a〜28eへの供給指令圧は調整される。故に、圧力制御弁28a〜28eにより駆動部3a〜3eのピストン8へ印加される油圧は、電磁弁22a〜22eへの入力指令値に応じて変化する。このことから、変速ECU36は駆動部3a〜3eのピストン8への印加油圧を制御可能であると考えることができる。
以下、AT制御装置10の変速制御処理ついて図5及び図6に基づき説明する。尚、この変速制御処理は、エンジン始動時又は一変速が終了する毎に開始される。
まず、図5に示すステップS1では、シフトレバーによる現在の選択レンジがDレンジであるか否かを変速ECU36が判定する。ステップS1において肯定判断がなされた場合に移行するステップS2では、現在の変速段が1速であるか否かを変速ECU36が判定する。
まず、図5に示すステップS1では、シフトレバーによる現在の選択レンジがDレンジであるか否かを変速ECU36が判定する。ステップS1において肯定判断がなされた場合に移行するステップS2では、現在の変速段が1速であるか否かを変速ECU36が判定する。
ステップS2において肯定判断がなされた場合には、ステップS3において、次の変速は現在変速段からのアップシフトになると変速ECU36が予測し、その後、ステップS9へと移行する。
ステップS2において否定判断がなされた場合には、ステップS4,S5,S6において、現在走行路が登坂路であるか否か、予測経路が登坂路であるか否か、並びに予測経路がカーブであるか否かを変速ECU36が判定する。
ステップS2において否定判断がなされた場合には、ステップS4,S5,S6において、現在走行路が登坂路であるか否か、予測経路が登坂路であるか否か、並びに予測経路がカーブであるか否かを変速ECU36が判定する。
ステップS4,S5,S6の全てにおいて肯定判断がなされた場合には、ステップS7において、次の変速は現在変速段からのダウンシフトになると変速ECU36が予測し、その後、ステップS10へと移行する。
ステップS4,S5,S6のいずれかにおいて否定判断がなされた場合には、ステップS8において、過去のアクセル傾向としてアクセル変化量が大となる頻度(例えばアクセル変化量が所定値を超える頻度)が基準頻度Fth以上であるか否かを変速ECU36が判定する。ここで基準頻度Fthは、アクセル変化量大の出現頻度についてダウンシフト重視の制御条件とされる頻度範囲の最小値に設定される。
ステップS4,S5,S6のいずれかにおいて否定判断がなされた場合には、ステップS8において、過去のアクセル傾向としてアクセル変化量が大となる頻度(例えばアクセル変化量が所定値を超える頻度)が基準頻度Fth以上であるか否かを変速ECU36が判定する。ここで基準頻度Fthは、アクセル変化量大の出現頻度についてダウンシフト重視の制御条件とされる頻度範囲の最小値に設定される。
ステップS8において否定判断がなされた場合には、ステップS3によるアップシフト予測後にステップS9へと移行する。
ステップS8において否定判断がなされた場合には、ステップS7によるダウンシフト予測後にステップS10へと移行する。
ステップS8において否定判断がなされた場合には、ステップS7によるダウンシフト予測後にステップS10へと移行する。
ステップS3によるアップシフト予測後に移行するステップS9では、次のアップシフトに備えて待機させる待機摩擦要素を、変速ECU36が現在の車速に基づいて摩擦要素2a〜2eの中から選択する。そして、この後、ステップS13へ移行する。
ステップS7によるダウンシフト予測後に移行するステップS10では、現在の車速がダウンシフト制限速度Vth以上であるか否かを変速ECU36が判定する。ここでダウンシフト制限速度Vthは、現在変速段からのダウンシフトによるホイールスピンを防止するために飛段の数が大きなダウンシフトを制限すべき車速範囲の最小値に設定される。
ステップS7によるダウンシフト予測後に移行するステップS10では、現在の車速がダウンシフト制限速度Vth以上であるか否かを変速ECU36が判定する。ここでダウンシフト制限速度Vthは、現在変速段からのダウンシフトによるホイールスピンを防止するために飛段の数が大きなダウンシフトを制限すべき車速範囲の最小値に設定される。
ステップS10において肯定判断がなされた場合には、ステップS11において変速ECU36が、次のダウンシフトに備えて待機させる待機摩擦要素を現在の車速及びダウンシフト制限条件に基づいて摩擦要素2a〜2eの中から選択する。ここでダウンシフト制限条件は、現在変速段からのダウンシフトによるホイールスピンを防止するために制限すべき段数のダウンシフトを規定したものであり、変速ECU36のメモリに予め記憶されている。そして、このような待機摩擦要素の選択の後、ステップS13へ移行する。
ステップS10において否定判断がなされた場合には、ステップS12において変速ECU36が、次のダウンシフトに備えて待機させる待機摩擦要素を現在車速に基づいて摩擦要素2a〜2eの中から選択する。そして、この後、ステップS13へ移行する。
ステップS10において否定判断がなされた場合には、ステップS12において変速ECU36が、次のダウンシフトに備えて待機させる待機摩擦要素を現在車速に基づいて摩擦要素2a〜2eの中から選択する。そして、この後、ステップS13へ移行する。
ステップS9,S11,S12による待機摩擦要素の選択後に移行する図6のステップS13では、変速ECU36が待機摩擦要素の駆動用ピストン8への印加油圧について増大を開始する。これにより、ピストン8へ油圧を作用させるピストン室9に作動油が充填されて当該ピストン8が図3(A)の如くストロークを開始する。尚、ここでストローク開始時の印加油圧をストローク開始油圧Psとする。
続くステップS14では変速ECU36が、待機摩擦要素の駆動用ピストン8に対応した油圧センサにより検出される油圧を監視し、当該検出油圧の時間増大率が閾値ΔPth以上となったか否かを判定する。ここで、図3(B)の如く待機摩擦要素の駆動用ピストン8が直近の入力摩擦板4に係止されることによって検出油圧には、図7に示す如きオーバーシュート現象が現れることから、当該オーバーシュート現象の検知に必要な時間増大率が閾値ΔPthとして設定される。
ステップS14において肯定判断がなされた場合に移行するステップS15では、次の変速開始まで待機摩擦要素の駆動用ピストン8へ印加しておく待機油圧Pwを変速ECU36が設定する。具体的に、まず変速ECU36は、待機摩擦要素の駆動用ピストン8に対応した油圧センサによる本ステップ開始時現在の検出油圧を基準油圧P0とする。次に変速ECU36は、油温センサ32による検出油温に基づいて、待機摩擦要素がトルク伝達を実現する完全締結圧Pbより低く且つストローク開始油圧Psより高い油圧に基準油圧P0を補正し、当該補正後の基準油圧P0を待機油圧Pwとする。以上により、待機摩擦要素の駆動用ピストン8への印加油圧は、図7に示す如く待機油圧Pwに保持されることとなる。
この後、ステップS16において変速ECU36が次の変速の実行を決定すると、ステップS17において変速ECU36が待機摩擦要素の駆動用ピストン8への印加油圧を待機油圧Pwから完全締結圧Pbより大きな締結保持圧Phまで増大する。したがって、待機摩擦要素が入力軸6から出力軸7へトルクを伝達する完全締結状態となり、変速が完了する。
このようにAT制御装置10では、次の変速に備えて待機させる待機摩擦要素の駆動用ピストン8に対して待機油圧Pwが当該次の変速前に印加される。そして、この待機油圧Pwは、完全締結圧Pbより低く且つストローク開始油圧Psより高い油圧、即ち待機摩擦要素がトルク伝達しない範囲で駆動用ピストン8をストロークさせる油圧に設定される。故に、待機摩擦要素の駆動用ピストン8へ油圧を作用させるピストン室9が作動油の充填状態となると共に、待機摩擦要素の駆動用ピストン8が待機摩擦要素にトルク伝達を実現させる手前までストロークした状態となる。これにより、次の変速が実際に開始されてから待機摩擦要素が締結側へ駆動されてトルク伝達を実現するまでにピストン8がストロークする距離が短くなるので、当該次の変速時における待機摩擦要素の締結時間も短くなる。したがって、AT制御装置10によれば、変速時に締結側へ駆動する摩擦要素への印加油圧について時間増大率を可及的に低く抑えたとしても、変速時間を短縮して変速レスポンスを高めることができるので、変速フィーリングが向上する。
また、AT制御装置10では、待機摩擦要素の駆動用ピストン8への印加油圧が増大して完全締結圧Pbとなる直前に、印加油圧の検出油圧に現れるオーバーシュート現象が検知されると、印加油圧がその増大を止められて待機油圧Pwに保持される。しかもこの待機油圧Pwは、オーバーシュート現象検知時の検出油圧である基準油圧P0を待機摩擦要素の潤滑油の検出温度に基づいて、完全締結圧Pbより低い待機摩擦要素のトルク非伝達範囲の油圧に補正することより求められる。したがって、次の変速前に待機摩擦要素がトルク伝達を実現する事態を確実に防止しつつ、高い変速レスポンスを実現することができる。
さらにAT制御装置10によると、一般的に変速制御に用いられている各種の車両関連情報に基づいて次の変速が予測されるので、当該予測精度は高くなる。しかも、この予測結果に基づいて待機摩擦要素が選択されるので、当該選択精度も高くなる。
以上、本実施形態では、変速ECU36が特許請求の範囲に記載の「選択手段」及び「予測手段」に相当し、電磁弁22a〜22eと圧力制御弁28a〜28eと変速ECU36が特許請求の範囲に記載の「印加手段」に相当し、油圧センサ30a〜30eが特許請求の範囲に記載の「検出手段」に相当する。また、待機油圧Pwが特許請求の範囲に記載の「待機液圧」に相当し、基準油圧P0が特許請求の範囲に記載の「基準液圧」に相当する。
以上、本実施形態では、変速ECU36が特許請求の範囲に記載の「選択手段」及び「予測手段」に相当し、電磁弁22a〜22eと圧力制御弁28a〜28eと変速ECU36が特許請求の範囲に記載の「印加手段」に相当し、油圧センサ30a〜30eが特許請求の範囲に記載の「検出手段」に相当する。また、待機油圧Pwが特許請求の範囲に記載の「待機液圧」に相当し、基準油圧P0が特許請求の範囲に記載の「基準液圧」に相当する。
ここまで、本発明の一実施形態について説明したが、本発明はかかる実施形態に限定して解釈されるものではない。
例えば上記実施形態では、ステアシフト付AT1の制御装置10に本発明を適用した例について説明した。しかし、本発明は、ステアシフトと同様の機能をフロアシフトにより実現するようにしたATの制御装置、あるいはそうしたフロアシフトやステアシフトのないATの制御装置等にも、適用可能である。
例えば上記実施形態では、ステアシフト付AT1の制御装置10に本発明を適用した例について説明した。しかし、本発明は、ステアシフトと同様の機能をフロアシフトにより実現するようにしたATの制御装置、あるいはそうしたフロアシフトやステアシフトのないATの制御装置等にも、適用可能である。
また、上記実施形態では、五つの摩擦要素2a〜2e及び五つの駆動部3a〜3eを備えたAT1の制御装置10に本発明を適用した例について説明したが、複数の摩擦要素及び複数の駆動部を備えたATの制御装置であれば、本発明を適用可能である。
さらに上記実施形態では、電磁弁20a〜20eの出力圧(指令圧)に従って圧力制御弁28a〜28eが調整する油圧を駆動部3a〜3eのピストン8へ印加している。これに対し、圧力制御弁28a〜28eを設けずに、電磁弁20a〜20eの出力圧を駆動部3a〜3eのピストン8へ直接印加するようにしてもよい。尚、この場合には、電磁弁22a〜22eと変速ECU36が特許請求の範囲に記載の「印加手段」に相当する。
さらに上記実施形態では、電磁弁20a〜20eの出力圧(指令圧)に従って圧力制御弁28a〜28eが調整する油圧を駆動部3a〜3eのピストン8へ印加している。これに対し、圧力制御弁28a〜28eを設けずに、電磁弁20a〜20eの出力圧を駆動部3a〜3eのピストン8へ直接印加するようにしてもよい。尚、この場合には、電磁弁22a〜22eと変速ECU36が特許請求の範囲に記載の「印加手段」に相当する。
またさらに上記実施形態では、待機摩擦要素の駆動用ピストン8への印加油圧について、当該印加油圧の検出油圧に現れるオーバーシュート現象を検知した場合に待機油圧Pwに保持するようにしている。これに対し、印加油圧を待機油圧Pwに保持するタイミングを、例えば待機摩擦要素の駆動用ピストン8のストローク量等に基づいて検知するようにしてもよいし、待機摩擦要素に駆動用ピストン8が当接するとき発生する振動をGセンサ等で検知してその検知タイミングを印加油圧の保持タイミングとしてもよい。尚、これらの場合には、各圧力制御弁28a〜28eと対応駆動部3a〜3eとの間の油路17a〜17eや、各圧力制御弁28a〜28eと対応電磁弁22a〜22eとの間の油路16a〜16eに、油圧脈動防止用のダンパを設けるようにしてもよい。
加えて上記実施形態では、オーバーシュート現象検知時の検出油圧である基準油圧P0を待機摩擦要素の潤滑油の検出温度に基づき補正して待機油圧Pwを求めているが、基準油圧P0を補正せずにそのまま待機油圧Pwとして用いるようにしてもよい。
加えて上記実施形態では、オーバーシュート現象検知時の検出油圧である基準油圧P0を待機摩擦要素の潤滑油の検出温度に基づき補正して待機油圧Pwを求めているが、基準油圧P0を補正せずにそのまま待機油圧Pwとして用いるようにしてもよい。
1 ステアシフト付AT(自動変速機)、2a,2b,2c,2d,2e 摩擦要素、3a,3b,3c,3d,3e 駆動部、4 入力摩擦板、5 出力摩擦板、6 入力軸、7 出力軸、8 ピストン(駆動用ピストン)、9 ピストン室、10 AT制御装置(自動変速機制御装置)、20a,20b,20c,20d,20e 電磁弁(印加手段)、28a,28b,28c,28d,28e 圧力制御弁(印加手段)、30a,30b,30c,30d,30e 油圧センサ(検出手段)、32 油温センサ、36 変速ECU(選択手段、予測手段、印加手段)、Pw 待機油圧、P0 基準油圧、Pb 完全締結圧、Ps ストローク開始油圧
Claims (7)
- 自動変速機の摩擦要素の駆動用ピストンへ作動流体の液圧を印加して前記摩擦要素の解放及び締結を制御する自動変速機制御装置であって、
複数の前記摩擦要素のうち次の変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を、前記次の変速に備えて待機させる待機摩擦要素として選択する選択手段と、
前記待機摩擦要素がトルク伝達しない範囲で前記待機摩擦要素の駆動用ピストンをストロークさせる待機液圧を、前記次の変速に先立って前記待機摩擦要素の駆動用ピストンへ印加する印加手段と、
を備えることを特徴とする自動変速機制御装置。 - 前記待機摩擦要素の駆動用ピストンへの印加液圧を検出する検出手段を備え、
前記印加手段は、前記検出手段による検出液圧に基づいて前記待機液圧を調整することを特徴とする請求項1に記載の自動変速機制御装置。 - 前記印加手段は、前記検出液圧に現れるオーバーシュート現象を検知するまで前記印加液圧を増大し、前記オーバーシュート現象を検知した場合に前記印加液圧を保持して前記待機液圧とすることを特徴とする請求項2に記載の自動変速機制御装置。
- 前記印加手段は、前記オーバーシュート現象を検知したときの前記検出液圧を基準液圧とし、前記摩擦要素を潤滑する潤滑流体の温度に基づいて補正した前記基準液圧を前記待機液圧とすることを特徴とする請求項3に記載の自動変速機制御装置。
- 前記印加手段は、前記検出液圧の時間増大率が閾値以上となった場合に前記オーバーシュート現象を検知したと判断することを特徴とする請求項3又は4に記載の自動変速機制御装置。
- 車両関連情報に基づいて次の変速を予測する予測手段を備え、
前記選択手段は、前記予測手段により予測された次の変速時に締結側へ駆動されてトルク伝達を実現する摩擦要素を前記待機摩擦要素として選択することを特徴とする請求項1〜5のいずれか一項に記載の自動変速機制御装置。 - 前記車両関連情報は、車両状態を表す車両状態情報と、車両の走行環境の状態を表す環境状態情報と、車両の運転者の運転傾向を表す運転傾向情報とのうち少なくとも一つの情報を含むことを特徴とする請求項6に記載の自動変速機制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005110736A JP2006292007A (ja) | 2005-04-07 | 2005-04-07 | 自動変速機制御装置 |
| US11/397,567 US7384358B2 (en) | 2005-04-07 | 2006-04-05 | Automatic transmission control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005110736A JP2006292007A (ja) | 2005-04-07 | 2005-04-07 | 自動変速機制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006292007A true JP2006292007A (ja) | 2006-10-26 |
Family
ID=37235181
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005110736A Withdrawn JP2006292007A (ja) | 2005-04-07 | 2005-04-07 | 自動変速機制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7384358B2 (ja) |
| JP (1) | JP2006292007A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008106892A (ja) * | 2006-10-27 | 2008-05-08 | Denso Corp | 自動変速機の制御装置 |
| US9377062B2 (en) | 2013-12-17 | 2016-06-28 | Hyundai Motor Company | Clutch characteristic adjusting method for DCT |
| JP2017214993A (ja) * | 2016-06-01 | 2017-12-07 | ジヤトコ株式会社 | 自動変速機の制御装置及び自動変速機の制御方法 |
| WO2018212326A1 (ja) * | 2017-05-19 | 2018-11-22 | いすゞ自動車株式会社 | 自動変速機の制御装置 |
| CN111927949A (zh) * | 2020-08-20 | 2020-11-13 | 盛瑞传动股份有限公司 | 一种自动变速器的离合器备压控制方法 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7909721B2 (en) * | 2006-06-09 | 2011-03-22 | Saturn Electronics & Engineering, Inc. | Fluid pressure control assembly |
| KR100822722B1 (ko) | 2006-11-15 | 2008-04-17 | 주식회사 안다미로 | 당첨조건과 베팅액이 하나의 버튼으로 선택되어 구동하는릴게임기. |
| JP4363456B2 (ja) * | 2007-04-26 | 2009-11-11 | トヨタ自動車株式会社 | 自動変速機の制御装置 |
| JP6369504B2 (ja) * | 2016-05-19 | 2018-08-08 | マツダ株式会社 | 自動変速機の制御方法及び制御装置 |
| JP6369501B2 (ja) | 2016-05-19 | 2018-08-08 | マツダ株式会社 | 自動変速機の制御方法及び制御装置 |
| JP6369502B2 (ja) | 2016-05-19 | 2018-08-08 | マツダ株式会社 | 自動変速機の制御方法及び制御装置 |
| JP6512638B2 (ja) * | 2016-07-25 | 2019-05-15 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102017217402A1 (de) * | 2017-09-29 | 2019-04-04 | Zf Friedrichshafen Ag | Verfahren zur Steuerung eines Automatgetriebes |
| JP7024326B2 (ja) * | 2017-10-31 | 2022-02-24 | トヨタ自動車株式会社 | ハイブリッド車両 |
| CN115045927B (zh) * | 2022-05-09 | 2023-11-17 | 潍柴动力股份有限公司 | 离合器滑摩点的存储方法、存储装置与处理器 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05296327A (ja) | 1992-04-22 | 1993-11-09 | Nissan Motor Co Ltd | 自動変速機のクラッチ圧制御装置 |
| JP3041163B2 (ja) | 1993-06-03 | 2000-05-15 | トヨタ自動車株式会社 | 自動変速機の変速制御装置 |
| JP3584555B2 (ja) | 1995-07-27 | 2004-11-04 | トヨタ自動車株式会社 | 車両用自動変速機の変速制御装置 |
| JP4126493B2 (ja) * | 2003-06-27 | 2008-07-30 | アイシン精機株式会社 | 自動変速機及び自動変速機の待機油圧値設定方法 |
| JP4679889B2 (ja) * | 2004-11-26 | 2011-05-11 | 株式会社デンソー | 自動変速機制御装置 |
-
2005
- 2005-04-07 JP JP2005110736A patent/JP2006292007A/ja not_active Withdrawn
-
2006
- 2006-04-05 US US11/397,567 patent/US7384358B2/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008106892A (ja) * | 2006-10-27 | 2008-05-08 | Denso Corp | 自動変速機の制御装置 |
| US9377062B2 (en) | 2013-12-17 | 2016-06-28 | Hyundai Motor Company | Clutch characteristic adjusting method for DCT |
| JP2017214993A (ja) * | 2016-06-01 | 2017-12-07 | ジヤトコ株式会社 | 自動変速機の制御装置及び自動変速機の制御方法 |
| WO2018212326A1 (ja) * | 2017-05-19 | 2018-11-22 | いすゞ自動車株式会社 | 自動変速機の制御装置 |
| JP2018194131A (ja) * | 2017-05-19 | 2018-12-06 | いすゞ自動車株式会社 | 自動変速機の制御装置 |
| CN111927949A (zh) * | 2020-08-20 | 2020-11-13 | 盛瑞传动股份有限公司 | 一种自动变速器的离合器备压控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060247084A1 (en) | 2006-11-02 |
| US7384358B2 (en) | 2008-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006292007A (ja) | 自動変速機制御装置 | |
| CN106641239B (zh) | 用于车辆的具有双离合器传动装置的换挡控制方法 | |
| US8392079B2 (en) | Vehicle, control method and control apparatus for vehicle | |
| US7291092B2 (en) | Shift control apparatus and method for automatic transmission | |
| US6843754B2 (en) | Control apparatus for an automatic transmission and a method for controlling the same | |
| JPH10299892A (ja) | パワーシフタの制御装置 | |
| CN104340206B (zh) | 前馈发动机空转速度控制 | |
| KR20100136496A (ko) | 자동 변속기의 제어 장치 및 제어 방법 | |
| JP4496201B2 (ja) | 車両用動力伝達装置の変速時制御装置 | |
| EP3351415B1 (en) | Rotational speed display device | |
| EP1184607B1 (en) | A control device for an actuator applied in a transmission | |
| JP2004286182A (ja) | 自動変速機及び自動変速機の待機油圧値設定方法 | |
| JP2010156428A (ja) | 流量制御弁の制御装置 | |
| US7001299B2 (en) | Control apparatus of automatic transmission | |
| US10578210B2 (en) | Gear change control system and gear change control device | |
| US7203585B2 (en) | Device for controlling a start of a vehicle | |
| CN104806747A (zh) | 离合器压力控制装置 | |
| US7125363B2 (en) | Control method for suppressing blow-up phenomenon during power-on 2-3 upshift of automatic transmission | |
| JP4556535B2 (ja) | 無段変速機の制御装置 | |
| JP4793164B2 (ja) | 自動変速機用油圧制御装置 | |
| US7134983B2 (en) | Shift control method of automatic transmission for vehicles | |
| KR100461752B1 (ko) | 차량용 자동 변속기의 프리 챠지 유압 제어방법 | |
| US10082204B2 (en) | Control apparatus and method of automatic transmission | |
| JP5478218B2 (ja) | 油圧式クラッチ制御装置 | |
| JP2016104995A (ja) | 車両の急発進防止制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070618 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090710 |