JP2005297948A - 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 - Google Patents
動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 Download PDFInfo
- Publication number
- JP2005297948A JP2005297948A JP2005009196A JP2005009196A JP2005297948A JP 2005297948 A JP2005297948 A JP 2005297948A JP 2005009196 A JP2005009196 A JP 2005009196A JP 2005009196 A JP2005009196 A JP 2005009196A JP 2005297948 A JP2005297948 A JP 2005297948A
- Authority
- JP
- Japan
- Prior art keywords
- power
- motor
- output
- internal combustion
- combustion engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
【解決手段】 変速機60における変速段の切替が要求されたときには、バッテリ50の入力制限Winの範囲内でエンジントルク反力を受け持つモータMG1の発電を伴って駆動軸に要求される要求トルクTr*のすべてをエンジン22から動力分配統合機構30を介してリングギヤ軸32aに伝達されるトルクで賄うようにエンジン22とモータMG1,MG2とを制御し、その後に変速段の切替を行なう。これにより、モータMG2から駆動軸に出力すべきトルクを略値0にしてから変速段を切り替えることができるから、変速段の切替の際のトルクの落ち込みや変速ショックを抑制することができる。
【選択図】 図1
Description
内燃機関からの動力を駆動軸に伝達可能な動力伝達装置であって、
前記内燃機関の出力軸と前記駆動軸とに接続され、該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達可能な電力変換動力伝達手段と、
動力を入出力可能な電動機と、
変更可能な変速比をもって前記電動機と前記駆動軸との間の動力の伝達を行なう変速伝達手段と、
前記電力変換動力伝達手段および前記電動機と電力のやり取りが可能な蓄電手段と、
前記駆動軸に要求される要求駆動力に基づいて前記内燃機関から出力すべき目標動力を設定する目標動力設定手段と、
該設定された目標動力と前記内燃機関に適用した条件とに基づいて該内燃機関の動作点を設定し、該設定した動作点で該内燃機関が運転されると共に前記要求駆動力に対応する
駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御する駆動制御手段と、
前記変速伝達手段における変速比の切替が指示されたとき、前記駆動制御手段に代えて、前記設定された目標動力に基づいて前記蓄電手段の入力制限の範囲内で該駆動制御手段により設定される動作点とは異なる動作点を設定し、該設定した動作点で前記内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、前記設定した動作点で前記内燃機関を運転させた後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する変速切替時駆動制御手段と
を備えることを要旨とする。
からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達する発電可能な対回転子電動機であるものとすることもできる。
本発明の動力出力装置、即ち、内燃機関と、上述した各態様のいずれかの本発明の動力伝達装置、即ち、基本的には、内燃機関からの動力を駆動軸に伝達可能な動力伝達装置であって、前記内燃機関の出力軸と前記駆動軸とに接続され該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達可能な電力変換動力伝達手段と、動力を入出力可能な電動機と、変更可能な変速比をもって前記電動機と前記駆動軸との間の動力の伝達を行なう変速伝達手段と、前記電力変換動力伝達手段および前記電動機と電力のやり取りが可能な蓄電手段と、前記駆動軸に要求される要求駆動力に基づいて前記内燃機関から出力すべき目標動力を設定する目標動力設定手段と、該設定された目標動力と前記内燃機関に適用した条件とに基づいて該内燃機関の動作点を設定し該設定した動作点で該内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御する駆動制御手段と、前記変速伝達手段における変速比の切替が指示されたとき前記駆動制御手段に代えて前記設定された目標動力に基づいて前記蓄電手段の入力制限の範囲内で該駆動制御手段により設定される動作点とは異なる動作点を設定し該設定した動作点で前記内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し前記設定した動作点で前記内燃機関を運転させた後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する変速切替時駆動制御手段とを備える動力伝達装置とを搭載し、前記駆動軸が車軸に連結されて走行する
ことを要旨とする。
内燃機関の出力軸と駆動軸とに接続され該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達可能な電力変換動力伝達手段と、動力を入出力可能な電動機と、変更可能な変速比をもって前記電動機と前記駆動軸との間の動力の伝達を行なう変速伝達手段と、前記電力変換動力伝達手段および前記電動機と電力のやり取りが可能な蓄電手段と、を備える動力出力装置の制御方法であって、
(a)前記駆動軸に要求される要求駆動力に基づいて前記内燃機関から出力すべき目標動力を設定し、
(b)該設定された目標動力と前記内燃機関に適用した条件とに基づいて該内燃機関の動作点を設定し、該設定した動作点で該内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、
(c)前記変速伝達手段における変速比の切替が指示されたとき、前記ステップ(b)に代えて、前記設定された目標動力に基づいて前記蓄電手段の入力制限の範囲内で該ステップ(b)により設定される動作点とは異なる動作点を設定し、該設定した動作点で前記内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよ
う前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、前記設定した動作点で前記内燃機関を運転させた後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する
ことを要旨とする。
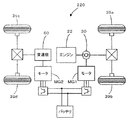
モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構37,デファレンシャルギヤ38を介して駆動輪39a,39bに出力される。
2の回転軸48の回転を比較的小さな減速比で減速してリングギヤ軸32aに伝達する(以下、この状態をHiギヤの状態という)。ブレーキB1,B2を共にオンとする状態は回転軸48やリングギヤ軸32aの回転を禁止するものとなる。ブレーキB1,B2のオンオフは、実施例では、図示しない油圧式のアクチュエータの駆動によりブレーキB1,B2に対して作用させる油圧を調節することにより行なわれている。
図3は、実施例のハイブリッド自動車20のハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、8msec毎)に繰り返し実行される。
/Gr)と動力分配統合機構30のギヤ比ρとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と現在の回転数Nm1とに基づいて次式(2)によりモータMG1のトルク指令Tm1*を計算する(ステップS112)。動力分配統合機構30の各回転要素の回転数とトルクの力学的な関係を示す共線図を図6に示す。図中、左のS軸はサンギヤ31の回転数を示し、C軸はキャリア34の回転数を示し、R軸はリングギヤ32(リングギヤ軸32a)の回転数Nrを示す。前述したように、サンギヤ31の回転数はモータMG1の回転数Nm1でありキャリア34の回転数はエンジン22の回転数Neであるから、モータMG1の目標回転数Nm1*はリングギヤ軸32aの回転数Nrとエンジン22の目標回転数Ne*と動力分配統合機構30のギヤ比ρとに基づいて式(1)により計算することができる。したがって、モータMG1が目標回転数Nm1*で回転するよう目標トルクTm1*を設定してモータMG1を駆動制御することにより、エンジン22の目標回転数Ne*で回転させることができる。ここで、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「KP」は比例項のゲインであり、右辺第3項の「KI」は積分項のゲインである。

なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
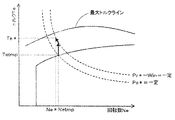
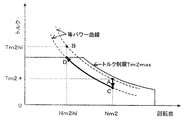
リ50に入力されると判断して、要求パワーPr*に入力制限Winを減じたもの(=Pr*−Win)を目標トルクTe*で除して得られたものをエンジン22の目標回転数Ne*として設定する(ステップS168)。図8に、エンジン22の目標回転数Ne*を設定する様子を示す。前述したように、値Pr*−Winは要求パワーPr*のすべてを賄いながらバッテリ50の入力制限Winの範囲内でエンジン22から出力できるパワーの最大値であるから、仮エンジン回転数Netmpと目標トルクTe*におけるエンジン22のパワーが値Pr*−Winを越えるときには値Pr*−Winが一定の曲線上で目標トルクTe*を出力できる回転数をエンジン22の目標回転数Ne*として設定することにより(図8参照)、目標トルクTe*の出力を確保することができる。目標回転数Ne*を設定すると、ステップS168で設定した目標トルクTe*が、設定した目標回転数Ne*においてエンジン22から出力できるトルクの上限としてのトルク上限値Temaxよりも大きいか否かを判定し(ステップS170)、目標トルクTe*がトルク上限値Temaxよりも大きくないときには、そのままフラグFを値1に設定して(ステップS156)、処理を終了し、目標トルクTe*がトルク上限値Temaxよりも大きいときには、ステップS158やステップS170で設定した目標回転数Ne*と目標トルクTe*を値Pr*−Winが一定の曲線と最大トルクラインとの交点における回転数とトルクに再設定し(ステップS174)、フラグFを値1に設定して(ステップS156)、処理を終了する。これにより、バッテリ50の入力制限Winの範囲内でエンジン22からリングギヤ軸32aに直接伝達されるトルクが要求トルクTr*となるようにエンジン22を制御することができ、モータMG2から出力すべきトルクを略値0とすることができる。
続するものとしても構わない。また、これに加えて、駆動輪39a,39bに接続された駆動軸にモータを接続するものとしても構わない。
Claims (12)
- 内燃機関からの動力を駆動軸に伝達可能な動力伝達装置であって、
前記内燃機関の出力軸と前記駆動軸とに接続され、該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達可能な電力変換動力伝達手段と、
動力を入出力可能な電動機と、
変更可能な変速比をもって前記電動機と前記駆動軸との間の動力の伝達を行なう変速伝達手段と、
前記電力変換動力伝達手段および前記電動機と電力のやり取りが可能な蓄電手段と、
前記駆動軸に要求される要求駆動力に基づいて前記内燃機関から出力すべき目標動力を設定する目標動力設定手段と、
該設定された目標動力と前記内燃機関に適用した条件とに基づいて該内燃機関の動作点を設定し、該設定した動作点で該内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御する駆動制御手段と、
前記変速伝達手段における変速比の切替が指示されたとき、前記駆動制御手段に代えて、前記設定された目標動力に基づいて前記蓄電手段の入力制限の範囲内で該駆動制御手段により設定される動作点とは異なる動作点を設定し、該設定した動作点で前記内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、前記設定した動作点で前記内燃機関を運転させた後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する変速切替時駆動制御手段と
を備える動力伝達装置。 - 前記変速切替時駆動制御手段は、前記駆動制御手段により設定される内燃機関の動作点におけるトルクよりも高トルクを出力する動作点を設定する手段である請求項1記載の動力伝達装置。
- 前記変速切替時駆動制御手段は、前記電力変換動力伝達手段を介して前記内燃機関から前記駆動軸に伝達される駆動力が前記要求駆動力に対応する駆動力となるよう前記内燃機関と前記電力変換動力伝達手段とを駆動制御し、該駆動制御の後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する手段である請求項1または2記載の動力伝達装置。
- 前記変速切替時駆動制御手段は、前記電動機の状態と該電動機の出力制限とに基づいて該電動機から出力される電動機出力パワーを保持しながら前記変速伝達手段における変速比を切り替える等パワー変速を行なうことができるときには該電動機出力パワーによる等パワー変速が行なわれるよう該電動機と該変速伝達手段とを駆動制御し、前記電動機の状態と該電動機の出力制限とに基づいて等パワー変速を行なうことができないときには前記電動機出力パワーを等パワー変速が可能なパワーに調整すると共に該調整した電動機出力パワーによる等パワー変速が行なわれるよう該電動機と前記変速伝達手段とを駆動制御する手段である請求項1または2記載の動力伝達装置。
- 前記変速切替時駆動制御手段は、前記電動機の状態と該電動機の出力制限とに基づいて等パワー変速を行なうことができないときには、前記変速伝達手段における変速比を切り替えた際に前記電動機から出力可能な最大パワーを前記電動機出力パワーとして調整する手段である請求項4記載の動力伝達装置。
- 前記変速切替時駆動制御手段は、前記電動機の状態と該電動機の出力制限とに基づいて等パワー変速を行なうことができないときには、回転数の変更を伴わずに前記調整した電動機出力パワーが出力されるよう前記電動機を制御した後に該調整した電動機出力パワーによる等パワー変速が行なわれるよう前記電動機と前記変速伝達手段とを駆動制御する手段である請求項5記載の動力伝達装置。
- 前記内燃機関に適用した条件は、該内燃機関が効率よく運転できる条件である請求項1ないし6いずれか記載の動力伝達装置。
- 前記電力変換動力伝達手段は、前記内燃機関の出力軸と前記駆動軸と第3の回転軸との3軸に接続され該3軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式動力入出力手段と、前記第3の回転軸に動力を入出力可能な発電機とを備える手段である請求項1ないし7いずれか記載の動力伝達装置。
- 前記電力変換動力伝達手段は、前記内燃機関の出力軸に接続された第1の回転子と前記駆動軸に接続された第2の回転子とを有し、電磁的な作用により該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達する発電可能な対回転子電動機である請求項1ないし7いずれか記載の動力伝達装置。
- 内燃機関と、請求項1ないし9いずれか記載の動力伝達装置とを備える動力出力装置。
- 請求項10記載の動力出力装置を搭載し、前記駆動軸が車軸に連結されて走行する自動車。
- 内燃機関と、該内燃機関の出力軸と駆動軸とに接続され該内燃機関からの動力の少なくとも一部を電力に変換すると共に残余の動力を該駆動軸に伝達可能な電力変換動力伝達手段と、動力を入出力可能な電動機と、変更可能な変速比をもって前記電動機と前記駆動軸との間の動力の伝達を行なう変速伝達手段と、前記電力変換動力伝達手段および前記電動機と電力のやり取りが可能な蓄電手段と、を備える動力出力装置の制御方法であって、
(a)前記駆動軸に要求される要求駆動力に基づいて前記内燃機関から出力すべき目標動力を設定し、
(b)該設定された目標動力と前記内燃機関に適用した条件とに基づいて該内燃機関の動作点を設定し、該設定した動作点で該内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、
(c)前記変速伝達手段における変速比の切替が指示されたとき、前記ステップ(b)に代えて、前記設定された目標動力に基づいて前記蓄電手段の入力制限の範囲内で該ステップ(b)により設定される動作点とは異なる動作点を設定し、該設定した動作点で前記内燃機関が運転されると共に前記要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力変換動力伝達手段と前記電動機とを駆動制御し、前記設定した動作点で前記内燃機関を運転させた後に前記変速伝達手段における変速比が切り替えられるよう該変速伝達手段を駆動制御する
動力出力装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005009196A JP4176080B2 (ja) | 2004-03-16 | 2005-01-17 | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004074787 | 2004-03-16 | ||
| JP2005009196A JP4176080B2 (ja) | 2004-03-16 | 2005-01-17 | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005297948A true JP2005297948A (ja) | 2005-10-27 |
| JP4176080B2 JP4176080B2 (ja) | 2008-11-05 |
Family
ID=35329990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005009196A Expired - Fee Related JP4176080B2 (ja) | 2004-03-16 | 2005-01-17 | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4176080B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008084766A1 (ja) * | 2007-01-10 | 2008-07-17 | Toyota Jidosha Kabushiki Kaisha | 車両用動力伝達装置の制御装置 |
| DE112008000504T5 (de) | 2007-02-28 | 2010-01-07 | Toyota Jidosha Kabushiki Kaisha | Steuervorrichtung für ein Hybridantriebssystem |
| JP2011116249A (ja) * | 2009-12-03 | 2011-06-16 | Toyota Motor Corp | ハイブリッド自動車 |
| JP2011183974A (ja) * | 2010-03-10 | 2011-09-22 | Toyota Motor Corp | 動力伝達装置の制御装置 |
| US8177005B2 (en) | 2006-03-08 | 2012-05-15 | Toyota Jidosha Kabushiki Kaisha | Vehicle, driving device and control method thereof |
| CN103282257A (zh) * | 2010-10-26 | 2013-09-04 | 日产自动车株式会社 | 混合动力车辆的驱动扭矩控制装置 |
| JP2013244786A (ja) * | 2012-05-24 | 2013-12-09 | Toyota Motor Corp | ハイブリッド自動車 |
| JPWO2012090263A1 (ja) * | 2010-12-27 | 2014-06-05 | トヨタ自動車株式会社 | ハイブリッド車両 |
| WO2016199813A1 (ja) * | 2015-06-09 | 2016-12-15 | 株式会社豊田自動織機 | 動力制御装置 |
-
2005
- 2005-01-17 JP JP2005009196A patent/JP4176080B2/ja not_active Expired - Fee Related
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8177005B2 (en) | 2006-03-08 | 2012-05-15 | Toyota Jidosha Kabushiki Kaisha | Vehicle, driving device and control method thereof |
| DE112008000101T5 (de) | 2007-01-10 | 2010-02-04 | Toyota Jidosha Kabushiki Kaisha, Toyota-shi | Steuergerät für ein Fahrzeugkraftübertragungssystem |
| WO2008084766A1 (ja) * | 2007-01-10 | 2008-07-17 | Toyota Jidosha Kabushiki Kaisha | 車両用動力伝達装置の制御装置 |
| US8172018B2 (en) | 2007-01-10 | 2012-05-08 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for vehicular power transmitting system |
| DE112008000504T5 (de) | 2007-02-28 | 2010-01-07 | Toyota Jidosha Kabushiki Kaisha | Steuervorrichtung für ein Hybridantriebssystem |
| US8528676B2 (en) | 2007-02-28 | 2013-09-10 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for hybrid drive system |
| JP2011116249A (ja) * | 2009-12-03 | 2011-06-16 | Toyota Motor Corp | ハイブリッド自動車 |
| JP2011183974A (ja) * | 2010-03-10 | 2011-09-22 | Toyota Motor Corp | 動力伝達装置の制御装置 |
| CN103282257A (zh) * | 2010-10-26 | 2013-09-04 | 日产自动车株式会社 | 混合动力车辆的驱动扭矩控制装置 |
| CN103282257B (zh) * | 2010-10-26 | 2016-02-24 | 日产自动车株式会社 | 混合动力车辆的驱动扭矩控制装置 |
| JPWO2012090263A1 (ja) * | 2010-12-27 | 2014-06-05 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2013244786A (ja) * | 2012-05-24 | 2013-12-09 | Toyota Motor Corp | ハイブリッド自動車 |
| WO2016199813A1 (ja) * | 2015-06-09 | 2016-12-15 | 株式会社豊田自動織機 | 動力制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4176080B2 (ja) | 2008-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4200988B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4227998B2 (ja) | 車両および駆動装置並びにこれらの制御方法 | |
| JP2006118359A (ja) | 車両およびその制御方法 | |
| JP2006077600A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4176080B2 (ja) | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 | |
| JP4254635B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4209375B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4222332B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2005151620A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4217234B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法 | |
| JP4030532B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法 | |
| JP3998002B2 (ja) | ハイブリッド自動車およびその制御方法 | |
| JP4182028B2 (ja) | 動力出力装置およびこれを搭載する自動車,駆動装置,動力出力装置の制御方法 | |
| JP4165492B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP3962391B2 (ja) | ハイブリッド車両の動力出力装置およびハイブリッド車両並びにハイブリッド車両の動力出力装置の制御方法 | |
| JP2006014387A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2007112291A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP4031773B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4038190B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法,駆動装置 | |
| JP2006144843A (ja) | 自動車およびその制御方法 | |
| JP4054005B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2005333713A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力伝達装置,動力出力装置の制御方法 | |
| JP4165491B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4196961B2 (ja) | 動力出力装置およびこれを搭載する自動車並びにその制御方法 | |
| JP4241707B2 (ja) | 車両およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20061004 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A132 Effective date: 20080603 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080812 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080819 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |