JP2005297612A - 車両の駆動力制御装置および駆動力制御方法 - Google Patents
車両の駆動力制御装置および駆動力制御方法 Download PDFInfo
- Publication number
- JP2005297612A JP2005297612A JP2004112386A JP2004112386A JP2005297612A JP 2005297612 A JP2005297612 A JP 2005297612A JP 2004112386 A JP2004112386 A JP 2004112386A JP 2004112386 A JP2004112386 A JP 2004112386A JP 2005297612 A JP2005297612 A JP 2005297612A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- deceleration
- preceding vehicle
- driving force
- force control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Controls For Constant Speed Travelling (AREA)
- Control Of Transmission Device (AREA)
- Traffic Control Systems (AREA)
- Regulating Braking Force (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
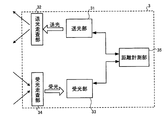
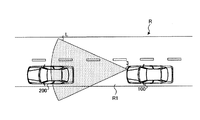
【解決手段】減速検出手段であるアクセルセンサ10により運転者の減速意志を検出した際に、自車100と自車の前方を走行する先行車両200との位置関係に応じて自車の減速度を制御する車両の駆動力制御装置において、自車100が先行車両200に対して追従走行を行っているかを判断する追従走行判断手段である追従走行判断部44と、先行車両200から送信されるこの先行車両200の減速度データを受信する減速度データ受信手段である減速度データ受信部46とを備え、追従走行判断部44により自車100が先行車両200に対して追従走行を行っていると判断した際に、減速度データ受信部46により受信した先行車両200の減速度データに基づいて自車100の減速度を制御する。
【選択図】 図1
Description
G200=(F1200+F2200)/W200 …(1)
F1200=(Te200×ηt200×ηd200×it200×id200)/r200 …(2)
F2200=μr200×W200+sinθ×W200+μa200×A200×V200 …(3)
it100=F1100×r100/(Te100×ηt100×ηd100×id100) …(4)
F1100=G100×W100/F2100 …(5)
F2100=μr100×W100+sinθ×W100+μa100×A100×V100 …(6)
2 自動変速機
3 先行車両検出装置
4 ECU
44 追従走行判断部(追従走行判断手段)
45 変速比変更部(変速比変更手段)
46 減速度データ受信部(減速度データ受信手段)
5 エンジン
6 トルクコンバータ
7 油圧供給装置
8 吸気系統
9 排気系統
10 アクセルセンサ
11 車速センサ
12 シフトセンサ
13 デファレンシャルギヤ
14 駆動輪
100 自車
200 先行車両
201 ECU
205 減速度算出部(減速度算出手段)
206 減速度データ送信部
207 エンジン
208 トルクコンバータ
209 自動変速機
210 デファレンシャルギヤ
211 駆動輪
Claims (4)
- 減速検出手段により運転者の減速意志を検出した際に、
自車の前方を走行する先行車両の情報に基づいて当該車両の減速度を制御する車両の駆動力制御装置において、
前記自車が前記先行車両に対して追従走行を行っているかを判断する追従走行判断手段と、
前記先行車両から送信される当該先行車両の減速度データを受信する減速度データ受信手段と、
を備え、
前記追従走行判断手段により前記自車が前記先行車両に対して追従走行を行っていると判断した際に、
前記減速度データ受信手段により受信した前記先行車両の減速度データに基づいて前記自車の減速度を制御することを特徴とする車両の駆動力制御装置。 - 前記自車に搭載された変速機の変速比を変更する変速比変更手段をさらに備え、
前記変速比変更手段は、前記減速度データ受信手段により受信した前記減速度データに基づいて、前記自車の変速機の変速比を前記自車の減速度が前記先行車両の減速度と一致あるいは近似する減速度となる変速比に変更することを特徴とする請求項1に記載の車両の駆動力制御装置。 - 前記自車に搭載された回生ブレーキ装置の回生量を変更する回生量変更手段をさらに備え、
前記回生量変更手段は、前記減速度データ受信手段により受信した前記減速度データに基づいて、前記自車の回生ブレーキ装置の回生量を前記自車の減速度が前記先行車両の減速度と一致あるいは近似する減速度となる回生量に変更することを特徴とする請求項1に記載の車両の駆動力制御装置。 - 自車の前方を走行する先行車両の情報に基づいて当該車両の減速度を制御する車両の駆動力制御装置において、
前記運転者の減速意志を判断する手順と、
前記自車が前記先行車両に対して追従走行を行っているかを判断する手順と、
前記先行車両から送信される当該先行車両の減速度データを受信する手順と、
前記自車が前記先行車両に対して追従走行を行っている際に、前記受信した前記先行車両の減速度データに基づいて前記自車の減速度を制御する手順と、
を含むことを特徴とする車両の駆動力制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004112386A JP2005297612A (ja) | 2004-04-06 | 2004-04-06 | 車両の駆動力制御装置および駆動力制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004112386A JP2005297612A (ja) | 2004-04-06 | 2004-04-06 | 車両の駆動力制御装置および駆動力制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297612A true JP2005297612A (ja) | 2005-10-27 |
Family
ID=35329708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004112386A Pending JP2005297612A (ja) | 2004-04-06 | 2004-04-06 | 車両の駆動力制御装置および駆動力制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297612A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007205407A (ja) * | 2006-01-31 | 2007-08-16 | Toyota Motor Corp | 車両用駆動力制御装置 |
| CN101868392A (zh) * | 2007-11-26 | 2010-10-20 | 爱考斯研究株式会社 | 车辆控制装置 |
| JP2012035818A (ja) * | 2010-08-11 | 2012-02-23 | Toyota Motor Corp | 車両制御装置 |
| JP2015067204A (ja) * | 2013-09-30 | 2015-04-13 | マツダ株式会社 | 追従走行制御装置 |
| JP2015067203A (ja) * | 2013-09-30 | 2015-04-13 | マツダ株式会社 | 追従走行制御装置 |
| JP2018193011A (ja) * | 2017-05-19 | 2018-12-06 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2019162988A (ja) * | 2018-03-20 | 2019-09-26 | 本田技研工業株式会社 | 車両制御装置及び車両制御方法 |
| KR20200141641A (ko) * | 2019-06-11 | 2020-12-21 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210146687A (ko) * | 2020-05-27 | 2021-12-06 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210157729A (ko) * | 2020-06-22 | 2021-12-29 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법, 그리고 차량 시스템 |
-
2004
- 2004-04-06 JP JP2004112386A patent/JP2005297612A/ja active Pending
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007205407A (ja) * | 2006-01-31 | 2007-08-16 | Toyota Motor Corp | 車両用駆動力制御装置 |
| CN101868392A (zh) * | 2007-11-26 | 2010-10-20 | 爱考斯研究株式会社 | 车辆控制装置 |
| US20100299044A1 (en) * | 2007-11-26 | 2010-11-25 | Equos Research Co., Ltd. | Vehicle control device |
| US8352147B2 (en) * | 2007-11-26 | 2013-01-08 | Equos Research Co., Ltd. | Vehicle control device |
| JP2012035818A (ja) * | 2010-08-11 | 2012-02-23 | Toyota Motor Corp | 車両制御装置 |
| JP2015067204A (ja) * | 2013-09-30 | 2015-04-13 | マツダ株式会社 | 追従走行制御装置 |
| JP2015067203A (ja) * | 2013-09-30 | 2015-04-13 | マツダ株式会社 | 追従走行制御装置 |
| JP6992279B2 (ja) | 2017-05-19 | 2022-01-13 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2018193011A (ja) * | 2017-05-19 | 2018-12-06 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2019162988A (ja) * | 2018-03-20 | 2019-09-26 | 本田技研工業株式会社 | 車両制御装置及び車両制御方法 |
| KR20200141641A (ko) * | 2019-06-11 | 2020-12-21 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR102645059B1 (ko) * | 2019-06-11 | 2024-03-08 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210146687A (ko) * | 2020-05-27 | 2021-12-06 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR102791263B1 (ko) * | 2020-05-27 | 2025-04-08 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210157729A (ko) * | 2020-06-22 | 2021-12-29 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법, 그리고 차량 시스템 |
| KR102791265B1 (ko) | 2020-06-22 | 2025-04-08 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법, 그리고 차량 시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7400964B2 (en) | Deceleration control apparatus and method for a vehicle | |
| US6626797B2 (en) | Vehicular control apparatus and method for controlling automatic gear change | |
| US7469178B2 (en) | Deceleration control apparatus and method for a vehicle | |
| US8078381B2 (en) | Vehicle speed control apparatus in accordance with curvature of vehicle trajectory | |
| US20050218718A1 (en) | Deceleration control apparatus and method for a vehicle | |
| US20050125134A1 (en) | Deceleration control apparatus and method for a vehicle | |
| EP1245428A2 (en) | Adaptive cruise control system for vehicle | |
| JP6633663B2 (ja) | 車両走行制御装置 | |
| JP6919316B2 (ja) | 車両制御装置 | |
| JP6619558B2 (ja) | ハイブリッド車両の制御装置 | |
| US20050267665A1 (en) | Deceleration control system and deceleration control method for vehicle | |
| WO2016152750A1 (ja) | 走行制御装置、及び、走行制御方法 | |
| WO2018207870A1 (ja) | 車両制御装置 | |
| JP2000039062A (ja) | 車輌の変速制御装置 | |
| JP2005297612A (ja) | 車両の駆動力制御装置および駆動力制御方法 | |
| JP4075585B2 (ja) | 車速制御装置およびプログラム | |
| US20230286505A1 (en) | Driving assistance apparatus | |
| JPH08335298A (ja) | 車両用運転支援装置 | |
| JP4432587B2 (ja) | 車両の駆動力制御装置および駆動力制御方法 | |
| JP2008232110A (ja) | 車両の制御装置 | |
| WO2018207834A1 (ja) | 車両制御装置および車両制御方法 | |
| JP2009078809A (ja) | 車両の走行状態制御装置 | |
| JP3973421B2 (ja) | 車輌用制御装置及び当該制御方法、並びに当該制御プログラム | |
| JP2024110530A (ja) | 車両の制御装置 | |
| WO2018207877A1 (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080617 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081209 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090224 |