JP2005294776A - 位置検出装置、及び位置検出方法 - Google Patents
位置検出装置、及び位置検出方法 Download PDFInfo
- Publication number
- JP2005294776A JP2005294776A JP2004111753A JP2004111753A JP2005294776A JP 2005294776 A JP2005294776 A JP 2005294776A JP 2004111753 A JP2004111753 A JP 2004111753A JP 2004111753 A JP2004111753 A JP 2004111753A JP 2005294776 A JP2005294776 A JP 2005294776A
- Authority
- JP
- Japan
- Prior art keywords
- alignment
- value
- dimensional shape
- signal waveform
- mark
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【課題】 正確な位置合わせを可能とする位置合わせ方法とそれを用いた露光装置と、それに好適なオフセット計測装置を提供する。
【解決手段】 ウエハ上のマークの位置検出装置において、マークのレジスト塗布前後の各立体形状の測定データを用いて、シミュレータによりレジスト塗布後のアライメント信号波形を計算により求め、該計算により求めたアライメント信号波形を用いてレジスト塗布後のアライメント値のオフセットを求める時、レジスト塗布前後のマークの立体形状の相対位置をアライメントスコープを用いて得られたアライメント検出値と合致させる為に、レジスト塗布前のマークの立体形状とレジスト塗布後のマークの立体形状の該相対位置を調整してシミュレータにより計算する。
【選択図】 図9
【解決手段】 ウエハ上のマークの位置検出装置において、マークのレジスト塗布前後の各立体形状の測定データを用いて、シミュレータによりレジスト塗布後のアライメント信号波形を計算により求め、該計算により求めたアライメント信号波形を用いてレジスト塗布後のアライメント値のオフセットを求める時、レジスト塗布前後のマークの立体形状の相対位置をアライメントスコープを用いて得られたアライメント検出値と合致させる為に、レジスト塗布前のマークの立体形状とレジスト塗布後のマークの立体形状の該相対位置を調整してシミュレータにより計算する。
【選択図】 図9
Description
本発明は、例えば半導体製造用の露光装置において、第1物体としてのレチクル面上に形成されているIC、LSI、VLSI等の微細な電子回路パターンと、第2物体としてのウエハとの相対的な位置合わせ(アライメント)をおこなう為の位置合わせ方法及び露光装置に関するものである。また本発明は、特にウエハプロセス誤差であるWIS(Wafer Induced Shift)が発生しうる状況においてアライメントをおこなう必要がある位置合わせ方法及び露光装置に関するものである。
半導体製造用の投影露光装置には、集積回路の高密度化に伴いレチクル面上の回路パターンをウエハ面上に、より高い解像力で投影露光することが要求されている。回路パターンの投影解像力を向上させる手段としては、露光光の波長を固定して投影光学系のNAを大きくしたり、露光光をより短波長化して露光する方法がとられている。
一方、回路パターンの微細化に伴い電子回路パターンが形成されているレチクルとウエハとの高精度アライメントに対する要求もますます厳しくなっている。
レチクルとウエハの位置合わせには、ウエハ面上に塗布されたレジストを感光させる露光光を使用する場合と、感光させない非露光光、例えばHe−Neレーザの発振波長である633nm を使用する場合があるが、現状の実用化されているアライメントの使用波長は、非露光光がほとんどである。これは非露光光が半導体製造プロセスの影響を受けにくいことが大きな理由であり、特にレジストに対する透過率が高い為、ウエハマークをレジスト特性に関係なく観察できるというメリットを持っているためである。
非露光光を用いた位置合わせ装置の出願が、例えば特許文献1や特許文献2等で提案され、実際に製品化されて効果が確認されている。
前記、従来公知のアライメント技術は非露光光TTL(Through The Lens)Off−axis方式と呼ばれ、レチクルパターンをウエハ上に転写投影する投影光学系に非露光光を通したとき発生する色収差をアライメント光学系で補正している。
また、現在実際に使用されているアライメント方法のほとんどは、ウエハ上のアライメントマークの光学像をCCD カメラ等の撮像素子上に結像して得られる電気信号を画像処理し、ウエハ位置を検出する方法が採用されている。ここで画像処理とは特許文献3等で紹介されている対称性マッチング法、あるいはテンプレートマッチング法等を用いてもよい。
前述の画像処理を使用した非露光光TTL Off−axis方式はi線ステッパ−には使用されているが、エキシマレーザを光源とするエキシマステッパ−には採用されていない。理由は、エキシマステッパ−の投影光学系の場合、非露光光、例えばHe−Neレーザの発振波長である633nmで発生する投影光学系の色収差が非常に大きく、アライメント光学系での補正を高NAでおこなうことができないからである。
このためエキシマステッパ−においては、前述の非露光光TTL Off−axis方式に代わり、投影光学系を通さないOff−axis顕微鏡を設け、非露光波長で観察をおこなう非露光光Off−axis方式の画像処理方式の検出系がほとんどである。
非露光光Off−axis方式は投影光学系を通らない方式、即ちTTLではなくnon TTL Off−axis方式であるため、Off−axis顕微鏡と投影光学系との距離、いわゆるベースラインの変動が精度劣化の要因となる。ベースラインの変動を抑え、高精度アライメントを達成するため、非露光光Off−axis方式では熱的に影響されにくい部材を使用したり、頻繁にベースライン補正をおこなうことが必要とされる。
また、エキシマステッパーにおける非露光光TTL Off−axis方式では、画像処理方式以外のものも採用されている。画像処理以外の方式とはアライメントマークからの直接反射光を検出せず、限られた回折光の光のみ使用する暗視野検出方式であり、ヘテロダイン検出と呼ばれる方式も当てはまる。
限られた回折光を検出する非露光光TTL Off−axis方式は既に提案されている。この方式はベースラインが短い為、TTLでない非露光光Off−axis方式の欠点は解消しているが、暗視野検出の為、明視野検出に比較すると検出率に問題が存在する。
現状の製造においては、上記の画像処理方式、画像処理方式以外の検出方式それぞれの短所、長所をプロセスに応じて見極めて選択し、使用する事で、要求される高精度の位置合わせを可能としている。
しかしながら、現在要求されているアライメントのさらなる高精度の要求に対しては、前述の二方式を用いても、半導体プロセスの誤差に対してまだ解決されない問題が存在する。最も大きな問題は、プロセスによりアライメントマーク形状が非対称になる事に対する対応がなされていない点である。
一例としてはメタルCMP(Chemical Mechanical Polishing)工程等における平坦化プロセスを挙げることができる。該CMP工程ではアライメントマークの構造が非対称となり、グローバルアライメントにおいて、回転エラーや、倍率エラーが発生し、精度が低下することが大きなが問題となっている。平坦化プロセスによるウエハのアライメントマークの構造の歪は、暗視野検出方式に誤差として大きく発生しやすく、精度低下の原因となる。従ってベースラインの安定性を画像処理方式以外の非露光光TTL Off−axis方式で達成しても、プロセス敏感度が高いことで、実際には使用されているケースが少ないのが現実である。
このプロセスによるアライメントマーク形状の非対称化したことによるアライメントオフセット値の検出を、プロファイラ−と光学シミュレータ(以下、シミュレータと呼ぶ)を用いることによりおこなうオフセットアナライザーと呼ぶ装置を用いた補正方法が、特許文献4として本出願人が提案しており、効果が確認されている。
特開昭63−32303号公報
特開平2−130908号公報
特開平6−151274号公報
特開2000−228356号公報
しかしながら、特許文献4においては、プロファイラ−で測定したアライメントマークの立体形状を用いて、アライメント信号波形を計算する際の、レジスト塗布前後におけるアライメントマークの立体形状の相対位置関係の決定は、アライメントスコープで得られたアライメント信号波形とシミュレータにより得られたアライメント信号波形の形状を一致させる方法が述べられているが、この方法では概略の相対位置決めはできるが、詳細な位置決めはできない方法であった。本発明は、上述従来例に鑑み、より正確な位置合わせを可能とする位置合わせ方法とそれを用いた露光装置と、それに好適なオフセット計測装置を提供することを目的とする。
本発明は、ウエハ上のアライメントマークの位置検出装置において、ウエハ上のアライメントマークのレジスト塗布前後の各立体形状の測定データを用いて、シミュレータによりレジスト塗布後のアライメント信号波形を計算により求め、該計算により求めたアライメント信号波形を用いてレジスト塗布後のアライメント値のオフセットを求める時、
前記レジスト塗布後のアライメント信号波形を計算により求める際、
レジスト塗布前のアライメントマークの立体形状と、
レジスト塗布後のアライメントマークの立体形状、
の相対位置を、
アライメントスコープを用いて得られたアライメント検出値と合致させる為に、レジスト塗布前のアライメントマークの立体形状とレジスト塗布後のアライメントマークの立体形状の該相対位置を調整してシミュレータにより計算する時、該相対位置を以下のようにして決定する。
前記レジスト塗布後のアライメント信号波形を計算により求める際、
レジスト塗布前のアライメントマークの立体形状と、
レジスト塗布後のアライメントマークの立体形状、
の相対位置を、
アライメントスコープを用いて得られたアライメント検出値と合致させる為に、レジスト塗布前のアライメントマークの立体形状とレジスト塗布後のアライメントマークの立体形状の該相対位置を調整してシミュレータにより計算する時、該相対位置を以下のようにして決定する。
1.ライメントスコープを用いて、ウエハ上のアライメントマークに対するアライメント値を検出する。
2.該アライメントスコープによるアライメント値の検出は、少なくとも2つ以上の照明光を用いておこない、第1の波長を有する照明光と第2の波長を有する照明光を順次アライメントマークに照射し、各波長の照明光を照射した状態毎に、アライメントスコープを用いて少なくとも2つのアライメント値を求め、該少なくとも2つのアライメント値間の差分を計算し、第1の差分値を求める。
3.レジスト塗布前後で測定した前記アライメントマークの立体形状を合成して、該合成した立体形状を用いて、シミュレータによりアライメント値を計算する。
4.該合成した立体形状を、該相対位置のずれ量が異なる状態の物を少なくとも2つ以上用意する。
5.該合成した立体形状のうち、第1の立体形状に対して、該第1の波長を有する照明光と該第2の波長を有する照明光の状態をシミュレータ内に設定し、各照明状態毎にアライメント値を計算し、少なくとも2つのアライメント値間の差分を計算し、第2の差分値を求める。
6.該合成した立体形状のうち、第2の立体形状に対して、該第1の波長を有する照明光と該第2の波長を有する照明光の状態をシミュレータ内に設定し、各照明状態毎にアライメント値を計算し、少なくとも2つのアライメント値間の差分を計算し、第3の差分値を求める。
7.該第1の差分値と、該第2の差分値、該第3の差分値を比較し、該アライメントスコープから得られた差分値に対し、シミュレータから得られる差分値が同等になる合成状態である立体形状を求め、該相対位置を決定する。
ことを特徴としている。
ことを特徴としている。
また、該少なくとも2つ以上のアライメント照明光において、各照明光の波長は単一波長からなる光であり、各照明光の波長は互いに異なることを特徴としている。
また、該少なくとも2つ以上のアライメント照明光において、少なくとも1つはブロードバンドの波長領域を有する照明光であり、その他の照明光は、単一波長を有する照明光であることを特徴としている。
また、該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の照明系のコヒーレンシの値が互いに異なることを特徴としている。
また、該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系に対するアライメントマークのフォーカス位置が互いに異なることを特徴としている。
また、該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の開口数(NA)が互いに異なることを特徴としている。
また、該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の照明系の偏光条件が互いに異なることを特徴としている。
また、該計算により求めたアライメント信号波形から、ウエハプロセス要因で生じるアライメントオフセットを求めて、アライメントスコープによるアライメント検出の際、前記アライメントオフセットを考慮しアライメントをおこなうことを特徴としている。
本発明によれば、ウエハプロセスによるウエハ上のアライメントマークの立体形状の変化によって生じるアライメントオフセットエラーを、プロファイラーとシミュレータにより求める時、プロファイラーによるレジスト塗布前後のアライメントマークの立体形状測定値の相対位置決めを精度よくおこなうことが可能となる。
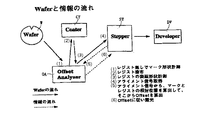
先ず、本発明の第1の実施形態を説明する。図5はオフセットアナライザー、位置合わせ装置を有する露光装置、及び周辺装置における、ウエハと各装置で得られる情報の流れを示した図である。なお、オフセットアナライザーは特許文献4にも紹介されているが、実施例の説明を容易に進める為、オフセットアナライザーの構成、及び測定原理を記載しながら説明を進める。また、以下の説明では露光装置をステッパー、露光装置に搭載されている位置合わせ装置の位置合わせ検出系をアライメントスコープと呼ぶ。また、オフセットアナライザーの構成エレメントの一つである、アライメントマークの立体形状を測定する測定装置は、光学方式を採用した測定器を用いることができるが、特許公報2735632号公報に示されている走査型トンネル顕微鏡や、特開平5−217861号公報に示されている原子間力顕微鏡(Atomic Force Microscope:AFM)等の分解能の高い方式を用いることもできる。本発明の実施形態では、アライメントマークの立体形状の検出には、AFMを用いた形態を代表として記述する。
図5において、ウエハWはまず工程(1)で示す様に、レジストを塗布する前にオフセットアナライザーOAに運ばれ、レジスト塗布前のアライメントマークの立体形状をAFMで測定する。
次に工程(2)でウエハWはコーターCTに運ばれてレジストが塗布され、工程(3)で再度オフセットアナライザーOAに運ばれてアライメントマーク上のレジストの立体形状をAFMで測定する。
ウエハWは次に工程(4)でステッパ−STに運ばれてアライメントスコープによりアライメントマークの信号が検出され、工程(5)でステッパ−STからアライメントマークの信号情報をオフセットアナライザーOAに送る。
続く工程(6)では、予めオフセットアナライザーOAでレジスト塗布前後で求めたレジストとウエハマークとの3次元的な相対位置関係より、アライメントスコープにより得られたアライメントマーク信号とウエハマーク位置との関係を求めてアライメント計測のオフセットを算出し、ステッパ−STに送る。ステッパ−STでは送られてきたオフセットをもとにグローバルアライメントをおこない、その後、露光をおこない、全てのショットの露光終了後、ウエハWは現像のためデベロッパーDVへ搬送される。現像後、いくつかの処理を経て回路を形成し、最終的に半導体デバイスが製造される。
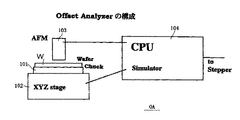
図6はオフセットアナライザーの構成を示したものである。
オフセットアナライザーは、ウエハWを支持するチャック101、前記チャック101を三次元的に移動させるXYZステージ102、レジスト塗布前/塗布後の状態でのアライメントマークの立体形状を計測するAFM103、オフセットアナライザー全体を制御し、かつ検出された立体形状からアライメントオフセットを算出するシミュレータを有したCPU104から構成されている。なお、図6ではウエハ搬送系やウエハの三次元位置検出系は不図示となっている。
次に、図1〜図4、図8〜図9を用いて、オフセットアナライザーでおこなわれている、工程(1)(図5)のレジスト無しでのマーク形状計測と、工程(3)(図5)のレジストの表面形状計測のデータからアライメント信号波形をシミュレータにより求め、その信号波形から、レジスト塗布後のアライメント値の変化量を求める過程を説明する。以下に説明する過程は、図9に示す流れ図に従っているものとする。
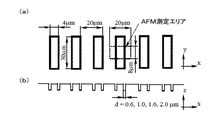
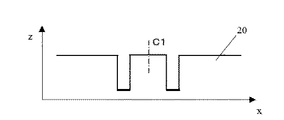
図2(a)は、ウエハW上のアライメントマークの概略図であり、図2(b)は、図2(a)のアライメントマークの断面図である。図2(a)の破線で囲った部分のマークの立体形状をAFMで先ず測定をする(工程7)。その立体形状20の測定結果の概略を図3に示す。ここで、図3の結果を基に、シミュレータにより、レジスト塗布前のアライメント信号波形を計算により求め、その波形に対して画像処理をおこない、レジスト塗布前のアライメントマークから得られるシミュレータによるアライメント値A1を求める(工程8)。
本発明で述べるシミュレータとは、Maxwell方程式を時間と空間について差分化し、その差分方程式を領域内の電磁場が安定するまで、磁界と電界について交互に計算する時間領域差分法(FDTD法)を用いたTEMPESTにより、アライメントマーク近傍でのアライメント信号光の位相と振幅値を計算し、これらの値を、EM−Series(光学像計算プログラム)、CODE V(光学設計、評価プログラム)等の市販ソフトウエアに取り込み、検出面上でのアライメント信号波形を計算するものである。
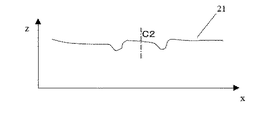
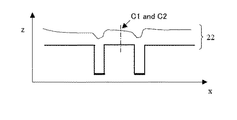
次に、レジスト塗布後のアライメントマークの立体形状21を図4に示す(工程9)。そしてレジスト塗布前のアライメントマークの立体形状(図3)とレジスト塗布後のアライメントマークの立体形状(図4)を合成し(工程10)、この合成した立体形状22に対してシミュレータを用いてアライメント信号波形を計算し、レジストが塗布されている状態でのアライメントマークから得られるアライメント信号波形として、その波形からアライメント値A2を求める(工程11)。そして、A1とA2の差を取ることにより、レジスト塗布によるアライメント値の変化(=WIS)の値を求めることができる(工程12)。
しかし、前述の図3と図4に示す立体形状20、21の合成時(図9の工程10)に、その合成後の立体形状22が、現実のウエハ上での形状と同等でなければ、得られる波形、及びその波形から得られるアライメント値は正しい値は示さない。以下、本出願で提案する、AFMで測定したレジスト塗布前後の立体形状20、21の合成を、現実のウエハ上での形状と同等の状態で重ね合わせる方法を述べる。
図10は、図9の工程10の部分を更に詳細に説明する図であり、AFMで測定したレジスト塗布前後の立体形状20、21の合成方法を示す流れ図である。
先ず、レジスト塗布前後で、AFMで測定したアライメントマークを有するウエハWは、ステッパ−に送られ、ステッパ−内のアライメントスコープを用いてアライメント信号が検出され、検出されたアライメント信号に対して画像処理検出をおこない、アライメント値が算出される。
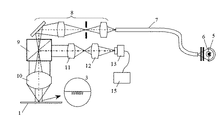
図7はアライメントスコープの構成を示す図であり、光源が、ハロゲンランプ5以外に複数用意されており(不図示)、光源からの光はファイバー7に導かれている。ファイバー7から出た光は、照明光学系8、ビームスプリッタ−9、及びレンズ10を通過し、ウエハ1上のアライメントマーク3を明視野照明する。アライメントマークからのアライメント信号光は、レンズ10、ビームスプリッタ9、結像光学系11、12を通り、CCD13の撮像面上に結像され、CCD13から得られた画像信号に対してアライメント値を求める。また、不図示のアパーチャの大きさ(開口の直径)を変えることにより、照明光学系のNAと、検像光学系のNAの比率(=σ)を変えて、アライメント信号波形の検出をおこなってもよい。
アライメント信号の検出は、アライメントマークに対する照明光の波長を少なくとも2つ設定して、設定したアライメント波長毎にアライメント信号を検出し、アライメント値を算出する(工程13)。ここでは、例えば照明光の波長をλ1=554nm、λ2=626nmと設定し、各波長毎に検出したアライメント値を、それぞれXλ1、Xλ2とし、その差分をΔX1=Xλ1−Xλ2とし、ΔX1の値をCPU104に記憶する(工程14)。
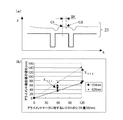
次に、図3、図4に示す立体形状20、21を合成し、合成した立体形状を基にシミュレータを用いて計算によりアライメント信号を求める。まず、図3、図4で表される立体形状を、図8に示すように、例えば個々の立体形状の重心位置が一致するように合成する(工程15)。この状態での立体形状20、21互いの相対位置ずれ量Sfを0とし、この合成状態での立体形状を基に、シミュレータを用いてアライメント信号波形、及び、アライメント値を求める(工程16)。次に、図1(a)に示すように、Sf≠0の状態を離散的に複数設定し、各設定毎の合成された立体形状23を用いて、そこから得られるアライメント信号、及びアライメント値をシミュレータを用いて求める(工程18)。シミュレータによりアライメント値を求める際は、工程13で述べた、アライメントスコープを用いてアライメント値を求めた時と同じ波長λ1、λ2を計算パラメータとして用いて計算をする。図1(b)は工程17で述べたシミュレータによるアライメント値をグラフ化したものであり、X軸は図1(a)の立体形状の重心位置の相対位置ずれ量Sf、Y軸は、Sf=0の時のアライメント値を基準とした時の、立体形状20、21の相対位置ずれ量Sfに依存して変化するアライメント値を示す。例えば、図1(b)において、シミュレータ内で、Sf=60nmの合成状態で得られるλ1、λ2の照明光によるアライメント値の計算結果を、d1λ1、d1λ2とし、Sf=120nmの合成状態で得られるλ1、λ2の照明光によるアライメント値の計算結果を、d2λ1、d2λ2とする。この時、各Sfの位置での差分値は、XSf1=d1λ1―d1λ2、XSf2=d2λ1―d2λ2となる。
次に、工程14のアライメントスコープにより求めた差分値ΔX1と、工程18のシミュレータにより求めた差分値XSf1、XSf2との比較をおこない、例えばΔX1=XSf21であった場合、その時のSfの値が、実際のウエハ上でのアライメントマークに対するレジストの塗布状態を表しているものといえる(工程19)。そして、そのSfの状態を有する立体形状23を基にシミュレータで得られたアライメント値と、レジスト塗布前の立体形状(図3)から得られるシミュレータによるアライメント値の差分を計算すれば、その値がレジスト塗布によるアライメントオフセット値ということができ、ステッパ−でアライメントをおこなう際、前述のアライメントオフセット値を考慮してアライメントをおこなえば、WISの影響を受けないアライメントをおこなうことができる。
本実施例では、アライメントスコープで測定する際の照明波長、及び、シミュレーションをおこなう際の照明波長であるλ1、λ2を互いに異なる単一波長として説明したが、照明波長がブロードバンド幅を有する光に対して、アライメント値が変化するのであれば、少なくともどちらか一方がブロードバンド幅を有する照明光であってもよい。また、本発明では図3、図4の合成をおこなう際、Sfのみについて説明したが、レジストの厚さ、及び、傾きをパラメータとしてシミュレータに与えてもよい。
また本実施例では、アライメントスコープにより求めた複数波長間のアライメント検出値の差分値と、シミュレータにより求めた複数波長間のアライメント検出値の差分値が一致した場合を述べたが、シミュレーションにより求める差分値を離散的に求め、求めた差分値を用いて内挿、及び外挿計算により求めてもよい。
次に図11を用いて、本発明の第2の実施例について説明する。図11のグラフは、Si段差120nmのアライメントマークに対して、厚さ464nmのレジストが塗布されている状態において、アライメントマークに対してレジストが相対的にSf=60nm、120nmずれた時の各状態でのアライメント信号波形をシミュレータにより求め、得られた信号波形からアライメント値を計算し、それをグラフ化したものである。計算時に用いた主なパラメータは、照明波長は633nmで固定し、照明系のコヒーレンシーを0.9と0.4で計算したものである。実施例1と同様に、各Sf位置での差分値XSf3、XSf4を求め、一方、アライメントスコープによるアライメント信号波形の検出も照明系のコヒーレンシーを0.9と0.4でおこない、検出したアライメント信号波形から得られる各アライメント値間の差分とを比較すれば、実施例1と同様に、シミュレーションにより求めたアライメント値を、実際のアライメントマークから得られるアライメント値と同等にすることができる。
実施例1では、アライメントマークに対するレジストの相対位置ずれに応じて生じるアライメント値の変化を、照明波長をパラメータとして、シミュレータ、及び、アライメントスコープを用いて求めた。実施例2では、アライメントマークを照明する照明光学系のコヒーレンシーをパラメータとした。更にその他のパラメータとして、アライメントスコープの光学系のNA、照明光の偏光状態、及びアライメントスコープに対するアライメントマークのフォーカス位置等の各パラメータ値の違いに対して、シミュレータにより求めたアライメント値の変化を検出することができれば、そのパラメータを基に、シミュレータ、及びアライメントスコープによるアライメント値の差分値を比較してもよい。
1 ウエハ
3 アライメントマーク
5 光源
6 光束
7 ファイバー
8 照明光学系
9 ビームスプリッタ
10 レンズ
11、12 結像光学系
13 CCD
15 画像処理装置
15 エレクター
20、23 立体形状
101 ウエハチャック
102 XYZステージ
103 AFM
104 CPU
3 アライメントマーク
5 光源
6 光束
7 ファイバー
8 照明光学系
9 ビームスプリッタ
10 レンズ
11、12 結像光学系
13 CCD
15 画像処理装置
15 エレクター
20、23 立体形状
101 ウエハチャック
102 XYZステージ
103 AFM
104 CPU
Claims (8)
- ウエハ上のアライメントマークの位置検出装置において、ウエハ上のアライメントマークのレジスト塗布前後の各立体形状の測定データを用いて、シミュレータによりレジスト塗布後のアライメント信号波形を計算により求め、該計算により求めたアライメント信号波形を用いてレジスト塗布後のアライメント値のオフセットを求める時、
前記レジスト塗布後のアライメント信号波形を計算により求める際、
レジスト塗布前のアライメントマークの立体形状と、
レジスト塗布後のアライメントマークの立体形状の相対位置を、
アライメントスコープを用いて得られたアライメント検出値と合致させる為に、レジスト塗布前のアライメントマークの立体形状とレジスト塗布後のアライメントマークの立体形状の該相対位置を調整してシミュレータにより計算する時、該相対位置を以下のようにして決定する。
1.アライメントスコープを用いて、ウエハ上のアライメントマークに対するアライメント値を検出する。
2.該アライメントスコープによるアライメント値の検出は、少なくとも2つ以上の照明光を用いておこない、第1の波長を有する照明光と第2の波長を有する照明光を順次アライメントマークに照射し、各波長の照明光を照射した状態毎に、アライメントスコープを用いて少なくとも2つのアライメント値を求め、該少なくとも2つのアライメント値間の差分を計算し、第1の差分値を求める。
3.レジスト塗布前後で測定した該アライメントマークの立体形状を合成して、該合成した立体形状を用いて、シミュレータによりアライメント値を計算する。
4.該合成した立体形状は、該相対位置のずれ量が異なる状態の物を少なくとも2つ以上用意する。
5.該合成した立体形状のうち、第1の立体形状に対して、該第1の波長を有する照明光と該第2の波長を有する照明光の状態をシミュレータ内に設定し、各照明状態毎にアライメント値を計算し、得られた2つのアライメント値間の差分を計算し、第2の差分値を求める。
6.該合成した立体形状のうち、第2の立体形状に対して、該第1の波長を有する照明光と該第2の波長を有する照明光の状態をシミュレータ内に設定し、各照明状態毎にアライメント値を計算し、得られた2つアライメント値間の差分を計算し、第3の差分値を求める。
7.該第1の差分値と、該第2の差分値、該第3の差分値を比較し、該アライメントスコープから得られた差分値に対し、シミュレータから得られる差分値が同等になる合成状態となる立体形状を求め、該相対位置を決定する。
ことを特徴とした位置検出方法、及び装置。 - 該少なくとも2つ以上のアライメント照明光において、各照明光の波長は単一波長からなる光であり、各照明光の波長は互いに異なることを特徴とした、請求項1記載の位置検出方法、及び装置。
- 該少なくとも2つ以上のアライメント照明光において、少なくとも1つはブロードバンドの波長領域を有する照明光であり、その他の照明光は、単一波長を有する照明光であることを特徴とする、請求項1記載の位置検出方法、及び装置。
- 該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の照明系のコヒーレンシの値が互いに異なることを特徴とする請求項1記載の位置検出方法、及び装置。
- 該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系に対するアライメントマークのフォーカス位置が互いに異なることを特徴とする請求項1記載の位置検出方法、及び装置。
- 該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の開口数(NA)が互いに異なることを特徴とする請求項1記載の位置検出方法、及び装置。
- 該少なくとも2つ以上のアライメント照明光毎にアライメント信号波形を求め、各計算により求めたアライメント信号波形からアライメント値を求める際、アライメント値を測定する時のアライメント検出光学系の照明系の偏光条件が互いに異なることを特徴とする請求項1記載の位置検出方法、及び装置。
- 該計算により求めたアライメント信号波形から、ウエハプロセス要因で生じるアライメントオフセットを求めて、アライメントスコープによるアライメント検出の際、前記アライメントオフセットを考慮しアライメントをおこなうことを特徴とした請求項1から請求項7記載の位置検出方法、及び装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111753A JP2005294776A (ja) | 2004-04-06 | 2004-04-06 | 位置検出装置、及び位置検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111753A JP2005294776A (ja) | 2004-04-06 | 2004-04-06 | 位置検出装置、及び位置検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005294776A true JP2005294776A (ja) | 2005-10-20 |
Family
ID=35327327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004111753A Withdrawn JP2005294776A (ja) | 2004-04-06 | 2004-04-06 | 位置検出装置、及び位置検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005294776A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11181831B2 (en) | 2018-12-12 | 2021-11-23 | Samsung Electronics Co., Ltd. | Methods of manufacturing semiconductor device |
| US11967564B2 (en) | 2018-07-30 | 2024-04-23 | Denso Corporation | Method for manufacturing semiconductor device |
-
2004
- 2004-04-06 JP JP2004111753A patent/JP2005294776A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11967564B2 (en) | 2018-07-30 | 2024-04-23 | Denso Corporation | Method for manufacturing semiconductor device |
| US11181831B2 (en) | 2018-12-12 | 2021-11-23 | Samsung Electronics Co., Ltd. | Methods of manufacturing semiconductor device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1006413B1 (en) | Alignment method and exposure apparatus using the same | |
| JP4095391B2 (ja) | 位置検出方法 | |
| JP5084558B2 (ja) | 表面形状計測装置、露光装置及びデバイス製造方法 | |
| CN112180696B (zh) | 检测装置、曝光装置和物品制造方法 | |
| US7576858B2 (en) | Position detecting method | |
| US10031429B2 (en) | Method of obtaining position, exposure method, and method of manufacturing article | |
| US20240184221A1 (en) | Alignment method and associated alignment and lithographic apparatuses | |
| JP2003007598A (ja) | フォーカスモニタ方法およびフォーカスモニタ用装置ならびに半導体装置の製造方法 | |
| CN116648675A (zh) | 量测系统和光刻系统 | |
| JP2001093807A (ja) | 位置計測方法及び位置計測装置 | |
| JP2009224523A (ja) | 露光方法、露光装置及びデバイス製造方法 | |
| JPH1022205A (ja) | パターン形成状態検出装置、及びこれを用いた投影露光装置 | |
| JP2007335493A (ja) | 測定方法及び装置、露光装置、並びに、デバイス製造方法 | |
| US11927892B2 (en) | Alignment method and associated alignment and lithographic apparatuses | |
| JP2004119477A (ja) | 重ね合わせ検査方法及び装置 | |
| TW200941147A (en) | Exposure apparatus, detection method, and method of manufacturing device | |
| JP4677183B2 (ja) | 位置検出装置、および露光装置 | |
| JP4724558B2 (ja) | 測定方法及び装置、露光装置 | |
| JP2005294776A (ja) | 位置検出装置、及び位置検出方法 | |
| JP4072407B2 (ja) | 露光方法 | |
| TW200428157A (en) | Method of measuring the performance of an illumination system | |
| JP4383945B2 (ja) | アライメント方法、露光方法、及び露光装置 | |
| JP2004087562A (ja) | 位置検出方法及びその装置、露光方法及びその装置、並びにデバイス製造方法 | |
| JP2005064394A (ja) | 検出方法、露光方法、露光装置、及び、デバイスの製造方法 | |
| JP2003257841A (ja) | マーク位置検出方法及び装置、位置検出方法及び装置、露光方法及び装置、並びにデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070703 |