JP2005294742A - 露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 - Google Patents
露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 Download PDFInfo
- Publication number
- JP2005294742A JP2005294742A JP2004111177A JP2004111177A JP2005294742A JP 2005294742 A JP2005294742 A JP 2005294742A JP 2004111177 A JP2004111177 A JP 2004111177A JP 2004111177 A JP2004111177 A JP 2004111177A JP 2005294742 A JP2005294742 A JP 2005294742A
- Authority
- JP
- Japan
- Prior art keywords
- information
- optical system
- projection optical
- exposure apparatus
- wafer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70605—Workpiece metrology
- G03F7/70616—Monitoring the printed patterns
- G03F7/70641—Focus
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
【課題】スループットを低下させることなく、低コストで精度良く露光装置の性能を評価するための情報を計測する。
【解決手段】投影光学系によりパターンの像をフォーカス位置毎に基板上の第1の領域内及び第2の領域内の複数の部分領域にそれぞれ形成し(ステップ407〜425)、投影光学系の第1のフォーカス情報及び第2のフォーカス情報を求める。そして、第1のフォーカス情報と第2のフォーカス情報とに基づいて基板の表面形状情報を求め(ステップ439)、その表面形状情報に基づいて基板の表面形状に依存する成分が補正された露光装置の性能を評価するための情報を求める(ステップ441、443)ことにより、高価な超平坦度ウエハ等を必要とせずに、しかも従来と同等の計測点数であっても、従来に比べて精度良く露光装置の性能を評価するための情報を計測することができる。
【選択図】図4
【解決手段】投影光学系によりパターンの像をフォーカス位置毎に基板上の第1の領域内及び第2の領域内の複数の部分領域にそれぞれ形成し(ステップ407〜425)、投影光学系の第1のフォーカス情報及び第2のフォーカス情報を求める。そして、第1のフォーカス情報と第2のフォーカス情報とに基づいて基板の表面形状情報を求め(ステップ439)、その表面形状情報に基づいて基板の表面形状に依存する成分が補正された露光装置の性能を評価するための情報を求める(ステップ441、443)ことにより、高価な超平坦度ウエハ等を必要とせずに、しかも従来と同等の計測点数であっても、従来に比べて精度良く露光装置の性能を評価するための情報を計測することができる。
【選択図】図4
Description
本発明は、露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法に係り、更に詳しくは、半導体素子(集積回路)や液晶表示素子などを製造するリソグラフィ工程で使用される露光装置の性能を評価するための情報を計測する性能情報計測方法及び性能情報計測装置、並びに前記性能情報計測方法によって性能を評価するための情報が計測された露光装置を用いて露光を行う露光方法に関する。
従来より、半導体素子又は液晶表示素子等を製造するためのフォトリソグラフィ工程では、マスク又はレチクル(以下、「レチクル」と総称する)のパターンを、投影光学系を介して表面にレジスト等の感光剤が塗布されたウエハ又はガラスプレート等の基板(以下、適宜「ウエハ」ともいう)上に転写する投影露光装置、例えばステップ・アンド・リピート方式の縮小投影露光装置(いわゆるステッパ)や、ステップ・アンド・スキャン方式の走査型投影露光装置(いわゆるスキャニング・ステッパ)等が用いられている。
ところで、半導体素子(集積回路)等は年々高集積化しており、これに伴い投影露光装置には、一層の性能の向上が要求されるようになってきた。例えば、投影露光装置の解像力を向上させ、より微細なパターンを精度良く転写するためには、投影光学系の光学性能を向上させることが必要である。このため、投影光学系の光学特性(結像特性を含む)を正確に計測し、評価することが重要となっている。さらに、走査型投影露光装置では、レチクルとウエハとを同期移動させながらパターンを投影光学系を介してウエハ上に転写しているため、ウエハの移動面の傾斜及びうねりが解像力に大きく影響する。
投影光学系の光学特性、例えば像面湾曲は、投影光学系の視野内の複数の計測点における最適なウエハの光軸方向位置(以下、適宜「最良フォーカス位置」と呼ぶ)に基づいて最小自乗法等の統計処理により求められる。従って、像面湾曲を求めるには、投影光学系の視野内の各計測点における最良フォーカス位置を精度良く計測する必要がある。
従来の投影露光装置における最良フォーカス位置を計測する方法としては、例えば、所定のテスト用のパターンを投影光学系の光軸方向に関する複数の位置でテスト用ウエハに転写し、そのテスト用ウエハを現像して得られるレジスト像(転写されたパターンの像)の形成状態を計測し、その形成状態と投影光学系の光軸方向に関するウエハの位置(以下、適宜「フォーカス位置」ともいう)との相関関係に基づいて最良フォーカス位置を判断する方法、例えばレジスト像のパターン線幅を上記の形成状態として計測する、いわゆるCD(線幅)−フォーカス法などが知られている。
しかしながら、最良フォーカス位置の計測に用いられるテスト用ウエハは、必ずしもその表面が平坦ではないため、計測される最良フォーカス位置にウエハの表面形状に起因する誤差が含まれるおそれがあった。
そこで、投影露光装置に設けられているオートフォーカス装置等を用いて、ウエハの表面形状を計測し、その計測結果に基づいて最良フォーカス位置を補正する方法、あるいは計測点の数を多くするとともに計測点間の間隔を小さくして各計測点における最良フォーカス位置を計測し、統計処理によってウエハの表面形状の影響を小さくする方法などが用いられていた。さらに、特別に研磨してウエハ表面の平坦度を高めた、いわゆる超平坦度ウエハ(スーパーフラットウエハ)等を用いて最良フォーカス位置を計測することも行なわれていた。
しかしながら、半導体素子等が高集積化するにつれて、上述したオートフォーカス装置等を用いる方法では、必要とされる計測精度を満足することが困難となり、補正を行なっても誤差が残留(残存)する可能性が生じてきた。
また、上述した計測点の数を多くする方法では、計測に要する時間が大きく増加し、スループットを低下させるという不都合があった。
さらに、上述した超平坦度ウエハ等を用いる方法では、コストが高くなるとともに、ウエハホルダ表面あるいはウエハ裏面のゴミ等に起因してウエハ表面の平坦度が低下し、計測結果に誤差が含まれるおそれがあった。
また、将来的に、半導体素子はさらに高集積化し、これに伴い、露光装置に要求される転写精度はますます厳しくなることは確実である。そこで、将来の露光装置に許容されるトータルオーバーレイ誤差を考慮すれば、上記計測結果に含まれる誤差に起因する転写誤差も無視できなくなってきている。
本発明は、かかる事情の下になされたものであり、その第1の目的は、スループットを低下させることなく、低コストで精度良く露光装置の性能を評価するための情報を計測することができる露光装置の性能情報計測方法及び性能情報計測装置を提供することにある。
また、本発明の第2の目的は、高精度な露光を実現できる露光方法を提供することにある。
請求項1に記載の発明は、第1面上のパターンを投影光学系(PL)を介して第2面上に転写する露光装置の性能を評価するための情報を計測する露光装置の性能情報計測方法であって、複数の計測用パターン(PUi,j)が形成されたマスク(RT)を前記第1面上に配置し、前記投影光学系の前記第2面側に配置された表面に感光層を有する物体(WT)の位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第1の領域内の複数の部分領域にそれぞれ形成する第1工程と;前記物体の位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第2の領域内の複数の部分領域にそれぞれ形成する第2工程と;前記第1工程で形成された前記計測用パターンの像の形成状態に関する情報に基づいて前記投影光学系の第1のフォーカス情報を求める第3工程と;前記第2工程で形成された前記計測用パターンの像の形成状態に関する情報に基づいて前記投影光学系の第2のフォーカス情報を求める第4工程と;前記第1のフォーカス情報と前記第2のフォーカス情報とに基づいて、前記物体の表面形状情報を求める第5工程と;を含む露光装置の性能情報計測方法である。
本明細書において、フォーカス情報とは、最良フォーカス位置に限らず、物体の表面形状を求める基となるフォーカス情報の全てを含む。
これによれば、投影光学系の光軸方向に関する物体の位置毎に、投影光学系を介して計測用パターンの像を物体上の第1の領域内の複数の部分領域にそれぞれ形成し(第1工程)、次に、投影光学系の光軸方向に関する物体の位置毎に、投影光学系を介して計測用パターンの像を物体上の第2の領域内の複数の部分領域にそれぞれ形成する(第2工程)。この結果、第1の領域内及び第2の領域内の各部分領域には、転写時の光軸方向に関する物体の位置が異なる計測用パターンの像が形成される。
さらに、第1工程で形成された計測用パターンの像の形成状態に関する情報に基づいて投影光学系の第1のフォーカス情報を求め(第3工程)、第2工程で形成された計測用パターンの像の形成状態に関する情報に基づいて投影光学系の第2のフォーカス情報を求める(第4工程)。この結果、同一の計測用パターンに由来する2つのフォーカス情報が得られる。
そして、第1のフォーカス情報と第2のフォーカス情報とに基づいて、物体の表面形状情報を求める(第5工程)。例えば、同一の計測用パターンに由来する第1のフォーカス情報と第2のフォーカス情報との差から、投影光学系の光軸方向に関する第1の領域と第2の領域との位置の差、すなわち、物体表面の平坦度を求めることができる。さらに、露光装置の性能を評価するための情報の計測結果が物体の表面形状に依存する成分を含む場合には、ここで求められた物体の表面形状情報に基づいて物体の表面形状に依存する成分を補正することにより露光装置の性能に関する情報のみを抽出することができる。すなわち、高価な超平坦度ウエハ等を必要とせずに、しかも従来と同等の計測点数であっても、従来に比べて精度良く露光装置の性能を評価するための情報を計測することができる。
従って、請求項1に記載の発明によれば、スループットを低下させることなく、低コストで精度良く露光装置の性能を評価するための情報を計測することが可能となる。
この場合において、請求項2に記載の露光装置の性能情報計測方法の如く、前記第1のフォーカス情報と前記第2のフォーカス情報と前記表面形状情報とに基づいて、前記露光装置の性能を評価するための情報を求める第6工程を更に含むこととすることができる。
この場合において、請求項3に記載の露光装置の性能情報計測方法の如く、前記第1工程に先だって、前記投影光学系を調整する第7工程を更に含み、前記第1工程及び第2工程では、前記マスクと前記物体とを同期移動させつつ前記計測用パターンの像を前記物体上に形成することとすることができる。
この場合において、前記露光装置の性能を評価するための情報としては、種々のものが考えられるが、請求項4に記載の露光装置の性能情報計測方法の如く、前記露光装置の性能を評価するための情報は、前記投影光学系の光学特性に関する情報を含むこととしても良い。
この場合において、請求項5に記載の露光装置の性能情報計測方法の如く、前記第1工程に先だって、前記投影光学系の光学特性に関する情報に基づいて、前記投影光学系を調整する工程を更に含むこととすることができる。
上記請求項2〜5に記載の各露光装置の性能情報計測方法において、前記露光装置の性能を評価するための情報としては、種々のものが考えられるが、請求項6に記載の露光装置の性能情報計測方法の如く、前記露光装置の性能を評価するための情報は、前記物体の走査特性に関する情報を含むこととすることができる。
本明細書において、物体の走査特性に関する情報とは、走査露光時における物体の移動面の傾斜やうねり等の情報を含む。
上記請求項1〜6に記載の各露光装置の性能情報計測方法において、請求項7に記載の露光装置の性能情報計測方法の如く、前記第1工程及び第2工程では、前記物体の前記投影光学系の光軸方向の位置変化は、前記物体を傾斜させることなく行なうこととすることができる。
上記請求項1〜7に記載の各露光装置の性能情報計測方法において、請求項8に記載の露光装置の性能情報計測方法の如く、前記物体の表面形状情報は、前記第1のフォーカス情報と第2のフォーカス情報との差に基づいて算出されることとしても良い。
上記請求項1〜8に記載の各露光装置の性能情報計測方法において、請求項9に記載の露光装置の性能情報計測方法の如く、前記計測用パターンは、特定の方向に等間隔で配置されていることとすることができる。
この場合において、請求項10に記載の露光装置の性能情報計測方法の如く、前記特定の方向に関する前記計測用パターン間の距離をLとし、前記投影光学系の投影倍率をMとすると、前記第1の領域と第2の領域との前記特定の方向に関する距離はL×Mであることとしても良い。
上記請求項1〜10に記載の各露光装置の性能情報計測方法において、前記計測用パターンとしては、種々のパターンが考えられるが、請求項11に記載の露光装置の性能情報計測方法の如く、前記計測用パターンは、ラインアンドスペースパターンを含むこととすることができる。
上記請求項1〜11に記載の各露光装置の性能情報計測方法において、前記計測用パターンの像の形成状態に関する情報としては、種々の情報が考えられるが、請求項12に記載の露光装置の性能情報計測方法の如く、前記計測用パターンの像の形成状態に関する情報は、前記計測用パターンの像の線幅情報を含むこととすることができる。
請求項13に記載の発明は、マスク(R)のパターンを投影光学系(PL)を介して基板ステージ(20)に保持された基板(W)上に転写する露光装置(100)の性能を評価するための情報を計測する性能情報計測装置であって、前記基板ステージの位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して計測用パターン(PUi,j)の像を前記基板ステージに保持された表面に感光層を有する物体(WT)上の第1の領域内の複数の部分領域にそれぞれ形成する第1の像形成装置と;前記基板ステージの位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第2の領域内の複数の部分領域にそれぞれ形成する第2の像形成装置と;前記第1の像形成装置にて形成された前記計測用パターンの像の形成状態に基づいて前記投影光学系の第1のフォーカス情報を求める第1のフォーカス情報取得装置と;前記第2の像形成装置にて形成された前記計測用パターンの像の形成状態に基づいて前記投影光学系の第2のフォーカス情報を求める第2のフォーカス情報取得装置と;前記第1のフォーカス情報と前記第2のフォーカス情報とに基づいて、前記物体の表面形状情報を求める形状情報取得装置と;前記第1のフォーカス情報と前記第2のフォーカス情報と前記表面形状情報とに基づいて、前記露光装置の性能を評価するための情報を算出する算出装置と;を含む性能情報計測装置である。
これによれば、第1の像形成装置及び第2の像形成装置では、基板ステージの位置を投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、投影光学系を介して計測用パターンの像を物体上の第1の領域内及び第2の領域内の複数の部分領域にそれぞれ形成する。その結果、第1の領域と第2の領域に同一の計測用パターンに由来する転写像がそれぞれ形成される。
また、第1のフォーカス情報取得装置では、第1の像形成装置にて形成された計測用パターンの像の形成状態に基づいて投影光学系の第1のフォーカス情報を求め、第2のフォーカス情報取得装置では、第2の像形成装置にて形成された計測用パターンの像の形成状態に基づいて投影光学系の第2のフォーカス情報を求める。その結果、物体上の異なる領域で同一の計測用パターンに由来するフォーカス情報が得られる。
そして、形状情報取得装置では、第1のフォーカス情報と第2のフォーカス情報とに基づいて物体の表面形状情報を求める。例えば、同一の計測用パターンに由来する第1のフォーカス情報と第2のフォーカス情報との差から、投影光学系の光軸方向に関する第1の領域と第2の領域との位置の差、すなわち、物体表面の平坦度を求めることができる。
さらに、算出装置では、第1のフォーカス情報と第2のフォーカス情報と表面形状情報とに基づいて露光装置の性能を評価するための情報を算出する。その結果、物体の表面形状に依存する成分が補正された露光装置の性能を評価するための情報が得られる。すなわち、高価な超平坦度ウエハ等を必要とせずに、しかも従来と同等の計測点数であっても、従来に比べて精度良く露光装置の性能を評価するための情報を計測することができる。
従って、請求項13に記載の性能情報計測装置によれば、スループットを低下させることなく、低コストで精度良く露光装置の性能を評価するための情報を計測することが可能となる。
請求項14に記載の露光方法は、露光用のエネルギビームをマスク(R)に照射し、前記マスクに形成されたパターンを投影光学系(PL)を介して基板(W)上に転写する露光方法であって、請求項4に記載の露光装置の性能情報計測方法によって計測された前記投影光学系の光学特性に関する情報を考慮して前記投影光学系を調整する工程と;前記調整された投影光学系を介して前記マスクに形成されたパターンを前記基板に転写する工程と;を含む露光方法である。
これによれば、請求項4に記載の露光装置の性能情報計測方法によって計測された投影光学系の光学特性に関する情報を考慮して最適な転写が行えるように投影光学系が調整され、その調整された投影光学系を介してマスクに形成されたパターンを基板上に転写するので、微細パターンを基板上に高精度に転写することができる。
請求項15に記載の露光方法は、マスク(R)と基板(W)とを同期移動して、前記マスクのパターンを投影光学系(PL)を介して基板上に転写する露光方法であって、請求項6に記載の露光装置の性能情報計測方法によって前記基板の走査特性に関する情報を計測する工程と;前記マスクと前記基板とを同期移動するとともに、該同期移動中に前記走査特性に関する情報の計測結果を考慮して前記基板の位置を制御しつつ、前記マスクのパターンを前記投影光学系を介して前記基板上に転写する工程と;を含む露光方法である。
これによれば、請求項6に記載の露光装置の性能情報計測方法によって基板の走査特性に関する情報が計測され、該計測結果を考慮してマスクと基板とを同期制御しつつ、マスクのパターンが投影光学系を介して基板上に転写される。このため、微細パターンを基板上に高精度に転写することができる。
以下、本発明の一実施形態を図1〜図13に基づいて説明する。
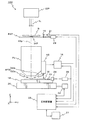
図1には、本発明に係る露光装置の性能情報計測方法及び露光方法の実施に好適な一実施形態に係る露光装置100の概略構成が示されている。この露光装置100は、ステップ・アンド・スキャン方式の走査型投影露光装置、すなわち、いわゆるスキャニング・ステッパである。
この露光装置100は、照明系IOP、マスクとしてのレチクルRを保持するレチクルステージRST、レチクルステージRSTを駆動するレチクルステージ駆動系29、レチクルRに形成されたパターンの像を感光剤(フォトレジスト)が塗布された物体(及び基板)としてのウエハW上に投影する投影光学系PL、ウエハWを保持して2次元平面(XY平面内)を移動するXYステージ20、XYステージ20を駆動するウエハステージ駆動系22、及びこれらの制御系等を備えている。この制御系は、装置全体を統括制御する主制御装置28を中心として構成されている。
前記照明系IOPは、KrFエキシマレーザやArFエキシマレーザなどから成る光源と、オプティカルインテグレータ(フライアイレンズ、内面反射型インテグレータ、又は回折光学素子など)を含む照度均一化光学系、照明視野絞りとしてのレチクルブラインド、リレーレンズ系及びコンデンサレンズ系等(いずれも図示省略)を含む照明光学系とから構成されている。
照明系IOPによると、光源で発生した露光用のエネルギビームとしての照明光(以下、「照明光IL」と呼ぶ)は、照度均一化光学系により照度分布がほぼ均一な光束に変換される。照度均一化光学系から射出された照明光ILは、リレーレンズ系を介してレチクルブラインドに達する。このレチクルブラインドの開口を通過した光束は、リレーレンズ系、コンデンサレンズ系を通過してレチクルステージRST上に保持されたレチクルR上の矩形スリット状の照明領域IARを均一な照度分布で照明する。
前記レチクルステージRSTは、照明系IOPの図1における下方に配置されている。このレチクルステージRST上には不図示のバキュームチャック等を介してレチクルRが吸着保持されている。レチクルステージRSTは、Y軸方向(図1における紙面左右方向)、X軸方向(図1における紙面直交方向)及びθz方向(XY面に直交するZ軸回りの回転方向)に微小駆動可能であるとともに、所定の走査方向(ここではY軸方向とする)に指定された走査速度で駆動可能となっている。
レチクルステージRST上にはレチクルレーザ干渉計(以下、「レチクル干渉計」という)21からのレーザビームを反射する移動鏡15が固定されており、レチクルステージRSTの移動面内の位置はレチクル干渉計21によって、例えば0.5〜1nm程度の分解能で常時検出される。ここで、実際には、レチクルステージRST上にはY軸方向に直交する反射面を有する移動鏡とX軸方向に直交する反射面を有する移動鏡とが設けられ、これらの移動鏡に対応してレチクルY干渉計とレチクルX干渉計とが設けられているが、図1ではこれらが代表的に移動鏡15、レチクル干渉計21として示されている。なお、例えば、レチクルステージRSTの端面を鏡面加工して反射面(移動鏡15の反射面に相当)を形成しても良い。また、レチクルステージRSTの走査方向(本実施形態ではY軸方向)の位置検出に用いられるX軸方向に伸びた反射面の代わりに、少なくとも1つのコーナーキューブ型ミラーを用いても良い。ここで、レチクルY干渉計とレチクルX干渉計の一方、例えばレチクルY干渉計は、測長軸を2軸有する2軸干渉計であり、このレチクルY干渉計の計測値に基づきレチクルステージRSTのY位置に加え、θz方向の回転も計測できるようになっている。
前記レチクル干渉計21からのレチクルステージRSTの位置情報は主制御装置28に送られ、主制御装置28はこのレチクルステージRSTの位置情報に基づいてレチクルステージ駆動系29を介してレチクルステージRSTを駆動する。
前記投影光学系PLは、レチクルステージRSTの図1における下方に、その光軸AXpの方向がXY面に直交するZ軸方向となるように配置されている。この投影光学系PLとしては、ここでは両側テレセントリックな縮小系であって、Z軸方向の共通の光軸AXpを有する複数枚のレンズエレメントから成る屈折光学系が用いられている。また、前記レンズエレメントのうちの特定の複数枚は微動可能となっており、主制御装置28からの指令に基づいて、図示しない結像特性補正コントローラによってその移動が制御され、投影光学系PLの結像特性(光学特性の一部)、例えば倍率、ディストーション、コマ収差、及び像面湾曲などを調整できるようになっている。さらに結像特性補正コントローラは、光源の制御パラメータ(印加電圧など)を調整して、光源から発振される露光光ILの波長を所定範囲内でシフトさせることで、投影光学系PLの結像特性を調整することも可能となっている。
前記XYステージ20は、実際には不図示のベース上をY軸方向に移動するYステージと、このYステージ上をX軸方向に移動するXステージとで構成されているが、図1ではこれらがXYステージ20として示されている。このXYステージ20上に基板ステージとしてのウエハテーブル18が搭載され、このウエハテーブル18上に不図示のウエハホルダを介してウエハWが真空吸着等によって保持されている。
XYステージ20は、走査方向(Y軸方向)の移動のみならず、ウエハW上の複数のショット領域を前記照明領域IARと共役な投影光学系PLの視野内の投影領域に位置させることができるように、走査方向に直交する非走査方向(X軸方向)にも移動可能に構成されている。そして、ウエハW上の各ショット領域を走査(スキャン)露光する動作と、次ショットの露光のための走査開始位置(加速開始位置)まで移動する動作とを繰り返すステップ・アンド・スキャン動作を行う。
前記ウエハテーブル18は、ウエハWを保持するウエハホルダをZ軸方向及びXY面に対する傾斜方向に微小駆動するものである。このウエハテーブル18の上面には、移動鏡24が設けられており、この移動鏡24にレーザビームを投射して、その反射光を受光することにより、ウエハテーブル18のXY面内の位置を計測するレーザ干渉計26が移動鏡24の反射面に対向して設けられている。なお、実際には、移動鏡はX軸に直交する反射面を有するX移動鏡と、Y軸に直交する反射面を有するY移動鏡とが設けられ、これに対応してレーザ干渉計もX方向位置計測用のXレーザ干渉計とY方向位置計測用のYレーザ干渉計とが設けられているが、図1ではこれらが代表して移動鏡24、レーザ干渉計26として図示されている。なお、例えば、ウエハテーブル18の端面を鏡面加工して反射面(移動鏡24の反射面に相当)を形成しても良い。さらに、例えばボイスコイルモータなどを用いて、ウエハテーブル18をX、Y方向に微動可能、かつXY平面内で微小回転可能に構成しても良い。また、Xレーザ干渉計及びYレーザ干渉計は測長軸を複数有する多軸干渉計であり、ウエハテーブル18のX、Y位置の他、回転(ヨーイング(Z軸回りの回転であるθz回転)、ピッチング(X軸回りの回転であるθx回転)、ローリング(Y軸回りの回転であるθy回転))も計測可能となっている。従って、以下の説明ではレーザ干渉計26によって、ウエハテーブル18のX、Y、θz、θy、θxの5自由度方向の位置が計測されるものとする。なお、このようにして計測されるX座標及びY座標よりなる座標系(X,Y)を、以下ではステージ座標系とも呼ぶ。また、多軸干渉計は45°傾いてウエハテーブル18に設置される反射面を介して、投影光学系PLが載置される架台(不図示)に設置される反射面にレーザビームを照射し、投影光学系PLの光軸方向(Z軸方向)に関する相対位置情報を検出するようにしても良い。
レーザ干渉計26の計測値は主制御装置28に供給され、主制御装置28はこのレーザ干渉計26の計測値をモニタしつつ、ウエハステージ駆動系22を介してXYステージ20を駆動することにより、ウエハテーブル18のXY面内の位置制御が行われる。
また、ウエハW表面のZ軸方向の位置及び傾斜量は、例えば特開平6−283403号公報等に開示される送光系50a及び受光系50bを有する斜入射方式の多点焦点位置検出系から成るフォーカスセンサAFSによって計測されるようになっている。このフォーカスセンサAFSの計測値も主制御装置28に供給されており、主制御装置28は、フォーカスセンサAFSの計測値に基づいてウエハステージ駆動系22を介してウエハテーブル18をZ軸方向及び傾斜方向(θx,θy方向)に移動し、投影光学系PLの光軸方向に関するウエハWの位置及び傾きを制御するようになっている。
また、ウエハテーブル18上には、その表面がウエハWの表面と同じ高さになるように基準板FPが固定されている。この基準板FPの表面には、後述するアライメント検出系のいわゆるベースライン計測等に用いられる基準マークを含む各種の基準マークが形成されている。
また、投影光学系PLの鏡筒の側面には、オフ・アクシス方式のアライメント検出系ASが取り付けられている。このアライメント検出系ASとしては、例えば、ハロゲンランプ等を光源とする波長帯域幅の広い光で照明し、CCDカメラなどで撮像したウエハW上のアライメントマーク(又は基準板FP上の基準マーク)の画像データを画像処理してマーク位置を計測するFIA(Field Image Alignment)系のオフアクシス・アライメントセンサが用いられている。なお、アライメント検出系ASは画像処理方式に限られるものではなく、例えばアライメントマークを回折格子とし、コヒーレントビームの照射によって回折格子から発生する同次数の回折光を基準格子に照射し、この基準格子から発生する光を検出する方式などでも良い。
アライメント制御装置16は、アライメント検出系ASからの情報をA/D変換するとともに、レーザ干渉計26の計測値を参照してマーク位置を検出する。この検出結果はアライメント制御装置16から主制御装置28に供給されるようになっている。
さらに、本実施形態の露光装置100では、図示は省略されているが、レチクルRの上方に、例えば特開平7−176468号公報等に開示される、投影光学系PLを介してレチクルR上のレチクルマーク又はレチクルステージRST上の基準マーク(共に図示省略)と基準板FP上のマークとを同時に観察するための露光波長を用いたTTR(Through The Reticle)アライメント系から成る一対のレチクルアライメント顕微鏡が設けられている。これらのレチクルアライメント顕微鏡の検出信号は、アライメント制御装置16を介して主制御装置28に供給されるようになっている。
主制御装置28は、CPU(中央演算処理装置)、メモリ(ROM、RAM)、各種インターフェース等からなるいわゆるマイクロコンピュータ(又はワークステーション)を含んで構成され、露光動作が的確に行われるように、例えば、レチクルRとウエハWの同期走査、ウエハWのステッピング、露光タイミング等を統括して制御する。また、主制御装置28は、記憶装置27と接続されており、記憶装置27に対して各種データの保存や読み出しができるようになっている。
図2には、露光装置100の性能の一つである投影光学系PLの光学特性を計測するのに用いられるテスト用レチクルRT(以下、「レチクルRT」と略述する)の一例が示されている。このレチクルRTは、ガラス基板42の一方の面(図1のレチクルステージRSTに搭載されたときに下面となる面)の中央にパターン領域PAが形成され、パターン領域PAのX軸方向の両側には、少なくとも1対のレチクルアライメントマーク(図示省略)が形成されている。
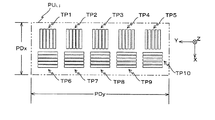
前記パターン領域PA内には、一例として図2に示されるように、39(13×3)個の同一の計測用パターンとしてのテストパターンが形成されており、それらはY軸方向に3個、X軸方向に13個がマトリックス状に2次元配置されている。そこで、テストパターンを特定するために、配列PUi,j(i=1〜3、j=1〜13)という表記を用いることとする。ここで、添え字iはY軸方向に関するテストパターンの配列番号を示し、図2の紙面左側(+Y側)に向かってその値は増加するものとする。添え字jはX軸方向に関するテストパターンの配列番号を示し、紙面上側(−X側)に向かってその値は増加するものとする。なお、テストパターンPUi,jは、39個全てが同時にレチクルRT上の照明領域IAR内に含まれるように配置されている。そして、X軸方向に関するテストパターン間の距離をLx(例えば2mm)、Y軸方向に関するテストパターン間の距離をLy(例えば3mm)とする。さらに、以下においては、適宜、PU1,1〜PU1,13を「第1パターンユニット」、PU2,1〜PU2,13を「第2パターンユニット」、PU3,1〜PU3,13を「第3パターンユニット」という。また、パターン領域PA内のテストパターンPUi,jが配置されていない領域は遮光領域となっている。
テストパターンPUi,jは、一例として図3に示されるように、10種類のラインアンドスペース(以下、「L/S」と略述する)パターンTP1〜TP10を含んでいる。L/SパターンTP1〜TP10のそれぞれは、5本のラインパターンが周期的に配置されている。なお、本明細書においては、ライン部の幅とスペース部の幅との比が1:1(すなわち、デューティ比が50パーセント)のもののみでなく、ラインパターンが所定ピッチで所定方向に並んでいるマルチラインパターンの全てを、L/Sパターンと便宜上呼ぶものとする。
L/SパターンTP1〜TP5では、各ラインパターンはX軸方向に伸びY軸方向を周期方向として配置されており、L/SパターンTP6〜TP10では、各ラインパターンはY軸方向に伸びX軸方向を周期方向として配置されている。
本実施形態では、一例として、L/SパターンTP1及びTP6では、ラインパターンの線幅は200nmであり、L/SパターンTP2及びTP7では、ラインパターンの線幅は180nmであり、L/SパターンTP3及びTP8では、ラインパターンの線幅は150nmであり、L/SパターンTP4及びTP9では、ラインパターンの線幅は140nmであり、L/SパターンTP5及びTP10では、ラインパターンの線幅は120nmであるものとする。なお、L/SパターンTP1〜TP10のそれぞれは、同一のピッチを有している。従って、これらのL/SパターンTP1〜TP10は、線幅に応じたデューティ比をそれぞれ有している。また、図3に示されるように、テストパターンPUi,jのY軸方向の長さをPDy、X軸方向の長さをPDxとする。この長さPDx,PDyにより規定される領域PUi,jが転写パターンと言うことになるが、後述するウエハ上での転写領域WU(1つの転写パターンがウエハ上で転写される領域)をなるべく小さくするために、この長さPDx,PDyは充分に小さく設定されている。
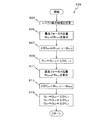
次に、本実施形態の露光装置100によりレチクルパターンをテスト用ウエハWT(物体、以下、「ウエハWT」と略述する)上に転写して投影光学系PLの光学特性の1つである像面湾曲を計測するための処理動作について、図4のフローチャートを用いて説明する。図4のフローチャートは、主制御装置28のCPUによって実行される一連の処理アルゴリズムに対応している。
図4のステップ401では、不図示のレチクルローダを用いてレチクルステージRST上にレチクルRTをロードする。
次のステップ403では、不図示のウエハローダを用いてウエハWTをウエハテーブル18上にロードする。
次のステップ405では、例えば、前述のレチクルアライメント顕微鏡(不図示)により投影光学系PLを介して少なくとも一対のレチクルアライメントマークとこれに対応して基準板FPの表面に形成されている少なくとも一対の基準マークとの相対位置を検出する。そして、そのときのレチクル干渉計21及びレーザ干渉計26の測定値とから、レチクル干渉計21の測長軸によって規定されるレチクルステージ座標系と、レーザ干渉計26の測長軸によって規定されるウエハステージ座標系との関係を求める。すなわち、このようにして、レチクルアライメントを行なう。
次のステップ407では、ウエハWT上におけるテストパターンPUi,jの転写領域を区別するためのフラグFに0をセットする。
次のステップ409では、ウエハWTのフォーカス位置の目標値を初期化する。すなわち、ウエハWTのフォーカス位置の目標値にZ1を設定する。なお、本実施形態では、一例としてウエハWTのフォーカス位置ZmをZ1からΔZ刻みでZ9まで変化させる。
次のステップ411では、ウエハWTのフォーカス位置が目標値(この場合Z1)と一致するように、フォーカスセンサAFSからの計測値をモニタしながらウエハステージ駆動系22を介してウエハテーブル18をZ軸方向に微少駆動する。但し、ここでは、ウエハWTの露光面の傾きを補正するためにウエハテーブル18をX軸回り及びY軸回りに回転する、いわゆるレベリング機能は動作させない。この理由については後述する。
次のステップ413では、この状態で露光を行なう。なお、ここでは、投影光学系PLの像面湾曲を計測するのが目的であるために、露光中はレチクルRTとウエハWT、すなわちレチクルステージRSTとXYステージ20は、静止させたままである。これにより、レチクルRTのパターンが投影光学系PLを介してウエハWT上に縮小転写される。すなわち、本実施形態では、39個のテストパターンPUi,jの転写像(潜像)が、ウエハWT上に形成される。
次のステップ415では、ウエハWTのフォーカス位置の目標値がZ9であるか否かを判断する。ここでは、最初の目標値Z1での露光が終了しただけであるため、ステップ415での判断は否定されステップ417に移行する。
このステップ417では、ウエハWTのフォーカス位置の目標値にΔZを加算する。
次のステップ419では、レーザ干渉計26の計測値をモニタしつつウエハステージ駆動系22を介してXYステージ20を移動し、ウエハWTを−Y方向に次の(1)式で示される距離ΔY1だけシフトする。そして、前記ステップ411に戻る。
ΔY1=2・PDy・β……(1)
上記(1)式におけるβは投影光学系PLの投影倍率である。
以下、ステップ415での判断が肯定されるまで、ステップ411→413→415→417→419の処理、判断を繰り返す。
ステップ415では、そのとき設定されているウエハWTのフォーカス位置の目標値がZ9であれば、ここでの判断は肯定され、ステップ421に移行する。
ステップ415での判断が肯定されたときに、ウエハWT上に形成されているテストパターンの転写領域(第1の領域)の一例が図5に示されている。なお、図5には、便宜上、第2パターンユニットの転写領域のみが示されている。ここで、フォーカス位置の目標値がZmのときのテストパターンPUi,jの転写領域(部分領域)をWUf,m,i,jと表記する。添え字fはフラグFの値(この場合は0)を意味している。従って、図5における紙面左下の転写領域は、WU0,1,2,1であり、図5における紙面右上の転写領域は、WU0,9,2,13である。すなわち、WU0,1,2,1〜WU0,9,2,13の117(=13×9)個の転写領域が形成されている。なお、ウエハWT上には、第1パターンユニットが転写された領域WU0,1,1,1〜WU0,9,1,13及び第3パターンユニットが転写された領域WU0,1,3,1〜WU0,9,3,13(いずれも不図示)も同様に形成されている。
図4に戻り、次のステップ421では、フラグFの値に応じて分岐先を判断する。ここでは、F=0なのでステップ423へ分岐する。
このステップ423では、ウエハWTを所定の目標位置(以下、便宜上「第1の目標位置」と呼ぶ)に位置決めするため、XYステージ20をXY面内で移動する。例えば、以下の手順でXYステージ20を移動する。
すなわち、先ずウエハWTを最初の位置に戻すために、ウエハWTが距離(ΔY1×8)だけ+Y方向にシフトするようにXYステージ20を移動する。次に、ウエハWTが次の(2)式で算出される距離WLxだけ+X方向にシフトするようにXYステージ20を移動する(図6参照)。なお、(2)式において、Lxは、X軸方向に隣り合うテストパターン間のX軸方向に関する距離である(図2参照)。
WLx=β・Lx ……(2)
さらに、ウエハWTが次の(3)式で示される距離ΔY2だけ−Y方向にシフトするようにXYステージ20を移動する(図6参照)。
ΔY2=PDy・β ……(3)
この結果、ウエハは、ステップ423における移動開始前の位置からX軸方向に関して+WLx、Y軸方向に関して(8ΔY1−ΔY2)だけシフトした第1の目標位置、すなわち、最初の位置から+X方向にWLx、−Y方向にΔY2だけシフトした位置に位置決めされる。勿論、上記の3段階の手順で移動する必要はなく、ステップ423における移動開始前の位置から上記の第1の目標位置に向かって直線的にXYステージ20を移動しても良い。
次のステップ425では、フラグFの値を1に変更した後、ステップ409に戻る。
このステップ409では、ウエハWTのフォーカス位置の目標値を初期化する。すなわち、目標値にZ1を設定する。
以下、ステップ415での判断が肯定されるまで、ステップ411→413→415→417→419の処理、判断を繰り返す。
ステップ415での判断が肯定されると、ステップ421に移行する。
ステップ415での判断が肯定されたときに、ウエハWT上に形成されているテストパターンの転写領域の一例が図6に示されている。なお、図6には、便宜上、ウエハWT上の図5と同じ場所が示されており、図6中の斜線で示される転写領域は、F=1のときに第2パターンユニットが転写された領域(第2の領域の一部)WU1,1,2,1〜WU1,9,2,13である。例えば、図6における紙面左下の斜線で示される転写領域はWU1,1,2,1であり、図6における紙面右上の斜線で示される転写領域はWU1,9,2,13である。なお、図6中の白抜きで示される転写領域は、前述したF=0のときの転写領域WU0,1,2,1〜WU0,9,2,13である。また、ウエハWT上には、F=1のときに第1パターンユニットが転写された領域(第2の領域の一部)WU1,1,1,1〜WU1,9,1,13及び第3パターンユニットが転写された領域(第2の領域の一部)WU1,1,3,1〜WU1,9,3,13(いずれも不図示)も同様に形成されている。
ステップ421では、F=1であるのでステップ429に分岐する。
このステップ429では、ウエハWTを次の目標位置(以下、便宜上「第2の目標位置」と呼ぶ)に位置決めするため、XYステージ20をXY面内で移動する。例えば、以下の手順でXYステージ20を移動する。
すなわち、先ずウエハWTを最初の位置に戻すために、ウエハWTが距離(ΔY1×8+ΔY2)だけ+Y方向に、距離WLxだけ−X方向にシフトするようにXYステージ20を移動する。次いで、ウエハWTが次の(4)式で算出される距離WLyだけ−Y方向にシフトするようにXYステージ20を移動する。ここで、LyはY軸方向に隣り合うテストパターン間のY軸方向に関する距離である(図2参照)。
WLy=β・Ly ……(4)
さらに、ウエハWTが次の(5)式で算出される距離ΔX1だけ+X方向にシフトするようにXYステージ20を移動する。
ΔX1=PDx・β ……(5)
この結果、ウエハは、ステップ429における移動開始前の位置からX軸方向に関して(−WLx+ΔX1)、Y軸方向に関して(8×ΔY1+ΔY2−WLy)だけシフトした第2の目標位置、すなわち、最初の位置から+X方向にΔX1、−Y方向にWLyだけシフトした位置に位置決めされる。勿論、上記の3段階の手順で移動する必要はなく、ステップ429における移動開始前の位置から上記の第2の目標位置に向かって直線的にXYステージ20を移動しても良い。
次のステップ431では、フラグFの値を2に変更した後、ステップ409に戻る。
このステップ409では、ウエハWTのフォーカス位置の目標値を初期化する。すなわち目標値にZ1を設定する。
以下、ステップ415での判断が肯定されるまで、ステップ411→413→415→417→419の処理、判断を繰り返す。
図4のステップ415での判断が肯定されると、ステップ421に移行する。
ステップ415での判断が肯定されたときに、ウエハWT上に形成されているテストパターンの転写領域の一例が図7に示されている。なお、図7には、便宜上、ウエハWT上の図6と同じ場所が示されており、図7中のダブルハッチングで示される領域はF=2のときに第1パターンユニットが転写された領域WU2,1,1,1〜WU2,9,1,13である。例えば、図7における紙面左下のダブルハッチング領域はWU2,1,1,1であり、図7における紙面右上のダブルハッチング領域はWU2,9,1,13である。なお、図7中の斜線で示される転写領域は、前述したF=1のときの転写領域WU1,1,2,1〜WU1,9,2,13であり、図7中の白抜きで示される転写領域は、前述したF=0のときの転写領域WU0,1,2,1〜WU0,9,2,13である。また、ウエハWT上には、F=2のときに第2パターンユニットが転写された領域WU2,1,2,1〜WU2,9,2,13及び第3パターンユニットが転写された領域WU3,1,3,1〜WU3,9,3,13(いずれも不図示)も同様に形成されている。
ここで、各転写領域WUf,m,i,jは非常に小さいので、図7に示されるように、転写領域WU0,m,2,1及びWU2,m,1,1(m=1〜9)のX座標値をX1、転写領域WU0,m,2,2、WU1,m,2,1及びWU2,m,1,2(m=1〜9)のX座標値をX2、転写領域WU0,m,2,3、WU1,m,2,2及びWU2,m,1,3(m=1〜9)のX座標値をX3、……、転写領域WU0,m,2,13、WU1,m,2,12及びWU2,m,1,13(m=1〜9)のX座標値をX13、転写領域WU1,m,2,13(m=1〜9)のX座標値をX14とする。
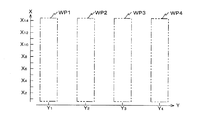
また、本実施形態では、ウエハWT上におけるテストパターンの転写領域は、一例として図8に示されるように、4つのグループ(WP1、WP2、WP3、WP4)に大別することができる。グループWP1には、F=0及びF=1での第1パターンユニットの転写領域が含まれる。グループWP2には、F=0及びF=1での第2パターンユニットの転写領域とF=2での第1パターンユニットの転写領域とが含まれる(図7参照)。グループWP3には、F=0及びF=1での第3パターンユニットの転写領域とF=2での第2パターンユニットの転写領域とが含まれる。グループWP4には、F=2での第3パターンユニットの転写領域が含まれる。そして、グループWP1の中心のY座標値をY1、グループWP2の中心のY座標値をY2、グループWP3の中心のY座標値をY3、グループWP4の中心のY座標値をY4とする。ここで、転写領域WUf,m,i,jは非常に小さいため、便宜上、グループWP1の各転写領域のY座標値はすべて同一、すなわちY1とみなすこととする。同様にグループWP2の各転写領域のY座標値はすべてY2、グループWP3の各転写領域のY座標値はすべてY3、グループWP4の各転写領域のY座標値はすべてY4とみなすこととする。なお、図8では、便宜上、転写領域WUf,m,i,jの図示は省略している。
そこで、本実施形態では、座標値(Xp、Yq)(p=1〜14、q=1〜4)で示されるウエハWT上の各位置を計測点とする。
図4に戻り、次のステップ421では、F=2であるのでステップ433に分岐する。
このステップ433では、不図示のウエハアンローダを介してウエハWTをウエハテーブル18上からアンロードした後、不図示のウエハ搬送系により、ウエハWTを露光装置100にインラインにて接続されている不図示のコータ・デベロッパに搬送する。
次のステップ435では、図示しないコータ・デベロッパの制御系にウエハWTの現像を指示する。これによって、コータ・デベロッパにてウエハWTの現像が行なわれる。コータ・デベロッパでの現像の終了により、ウエハWT上の転写領域WUf,m,i,j毎に、L/SパターンTP1〜TP10それぞれのレジスト像が形成される。
そして、ウエハWTの現像が終了したことを、不図示のコータ・デベロッパの制御系からの通知により確認すると、アライメント検出系ASを用いてレジスト像の線幅計測を行なうため、ステップ437に移行して、不図示のウエハローダに指示し、ウエハWTをウエハテーブル18上に再度ロードする。そして、ステップ439のウエハWTの表面形状情報を算出するサブルーチンに移行する。
このステップ439のサブルーチンでは、まず、図9のステップ501において、ウエハWT上に形成されたレジスト像を、アライメント検出系ASを用いて順次撮像し、その撮像データに基づいて所定の画像処理を行ない、転写領域WUf,m,i,j毎に、L/SパターンTP1〜TP10それぞれのレジスト像の線幅を計測する。なお、ここではコマ収差の影響を除くために5本のラインパターンのうち、周期方向に関して中央部に配置されたラインパターンのレジスト像の線幅を計測する。
次のステップ505では、Y座標値がY2でのX軸方向に関するウエハWTの表面形状情報を算出するために、グループWP2に含まれる各レジスト像の線幅値に基づいて各計測点での最良フォーカス位置を、一例として以下の手順で求める。なお、計測点(Xp、Yq)での最良フォーカス位置をBf,p,qと表記する。添え字fはフラグFの値を意味している。
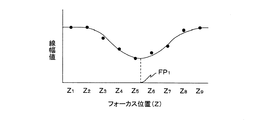
すなわち、先ず、計測点(X1、Y2)における最良フォーカス位置を求める。ここでは、F=0のときにテストパターンPU2,1が転写された9個の転写領域(WU0,1,2,1、WU0,2,2,1、WU0,3,2,1、・・・・・・、WU0,9,2,1)において計測された各レジスト像の線幅値に基づいて、一例として図10に示されるように、L/SパターンTP1のレジスト像の線幅値とフォーカス位置Zとの相関関係を示す近似曲線を求め、該近似曲線の極値FP1を求める。さらに、L/SパターンTP2〜TP10のレジスト像についても、それぞれ線幅値とフォーカス位置との相関関係を示す近似曲線を求め、各近似曲線の極値FP2〜FP10を求める。そして、上記の如くして得られた10個の極値FP1〜FP10を統計処理(例えば、平均化)し、その結果を最良フォーカス位置B0,1,2とする。
次に、計測点(X2、Y2)における最良フォーカス位置を求める。ここでは、F=0のときにテストパターンPU2,2が転写された9個の転写領域(WU0,1,2,2、WU0,2,2,2、WU0,3,2,2、……、WU0,9,2,2)において計測された各レジスト像の線幅値に基づいて、上記と同様にして最良フォーカス位置B0,2,2を求める。さらに、F=1のときにテストパターンPU2,1が転写された9個の転写領域(WU1,1,2,1、WU1,2,2,1、WU1,3,2,1、……、WU1,9,2,1)において計測された各レジスト像の線幅値に基づいて、上記と同様にして最良フォーカス位置B1,2,2を求める。
以下、同様にして他の計測点(Xp、Y2)(p=3〜14)における最良フォーカス位置を求める。
本実施形態では、一例として図11(A)に示されるように、計測点(X1、Y2)〜(X13、Y2)において、F=0のときに転写されたテストパターンのレジスト像の線幅値に基づいて第1の最良フォーカス位置(第1のフォーカス情報)が得られ、一例として図11(B)に示されるように、計測点(X2、Y2)〜(X14、Y2)において、F=1のときに転写されたテストパターンのレジスト像の線幅値に基づいて第2の最良フォーカス位置(第2のフォーカス情報)が得られる。
従来は、各計測点での最良フォーカス位置を統計処理(例えば、最小自乗法)して像面湾曲を求めていた。しかしながら、一例として図11(C)に示されるように、同一のテストパターンに由来する最良フォーカス位置であっても、第1の最良フォーカス位置と第2の最良フォーカス位置とは必ずしも一致していない。これは、ウエハWTの表面形状が平坦ではないことに起因している。
ここで、最良フォーカス位置の計測結果とウエハWTの表面形状との関係について考察する。
先ず、ここでウエハWT上の計測点(Xp、Yq)のZ軸方向に関する所定の基準位置からの距離(以下、便宜上「Z高さ」という)をDzp,qとする。また、ウエハWTの表面が平坦であると仮定したときにテストパターンPUi,jの転写像に基づいて得られる仮想的な最良フォーカス位置をHi,jとする。
そこで、例えば、計測点(X1、Y2)に転写されたテストパターンPU2,1の転写像に基づいて得られる第1の最良フォーカス位置B0,1,2は、次の(6)式で示されるように、仮想的な最良フォーカス位置H2,1とZ高さDz1,2とが加算されたものであると考えることができる。
B0,1,2=H2,1+Dz1,2 ……(6)
また、例えば、計測点(X2、Y2)に転写されたテストパターンPU2,1の転写像に基づいて得られる第2の最良フォーカス位置B1,2,2は、次の(7)式で示されるように、仮想的な最良フォーカス位置H2,1とZ高さDz2,2とが加算されたものであると考えることができる。
B1,2,2=H2,1+Dz2,2 ……(7)
次に、上記(7)式と(6)式の差を求めると、次の(8)式が得られる。
B1,2,2-B0,1,2=Dz2,2-Dz1,2 ……(8)
上記(8)式から明らかなように、第2の最良フォーカス位置B1,2,2と第1の最良フォーカス位置B0,1,2との差は、テストパターンPU2,1が転写された2つの計測点(X2、Y2)と(X1、Y2)のZ高さの差を意味している。すなわち、同一のテストパターンがウエハWT上の異なる計測点に転写された場合、各計測点で得られる最良フォーカス位置の差は、Z高さの差を示している。
図9に戻り、ステップ507では、上記考察に基づき、X軸方向に関して隣り合う2つの計測点(Xp、Y2)と(Xp+1、Y2)のZ高さの差を求めるために、同一のテストパターンに由来する2つの最良フォーカス位置、すなわち、第2の最良フォーカス位置B1,p+1,2と第1の最良フォーカス位置B0,p,2との差(以下、「第1のフォーカス差」という)ΔDXp,2(p=1〜13)を、次の(9)式を用いて算出する。
ΔDXp,2=B1,p+1,2-B0,p,2 ……(9)
ここで算出された第1のフォーカス差ΔDXp,2の一例が図12(A)に示されている。この図12(A)において、例えば、ΔDX5,2は、計測点(X6、Y2)と(X5、Y2)のZ高さの差を示している。
ここで算出された第1のフォーカス差ΔDXp,2の一例が図12(A)に示されている。この図12(A)において、例えば、ΔDX5,2は、計測点(X6、Y2)と(X5、Y2)のZ高さの差を示している。
図9に戻り、次のステップ509では、一例として計測点(X1、Y2)におけるZ軸方向の位置を基準位置とし、次の(10)式に示されるように、第1のフォーカス差ΔDXp,2を順次積算して、計測点(Xp、Y2)(p=2〜14)におけるZ高さDp,2を求める。なお、計測点(X1、Y2)を基準位置としているため、D1,2=0である。
Dp,2=Dp-1,2+ΔDXp-1,2 ……(10)
ここで、算出されたZ高さDp,2は、一例として、図12(B)に示されるように、X軸方向(但し、Y=Y2)に関するウエハWTの相対的な表面形状を示している。
ここで、算出されたZ高さDp,2は、一例として、図12(B)に示されるように、X軸方向(但し、Y=Y2)に関するウエハWTの相対的な表面形状を示している。
次のステップ511では、前記と同様にして、グループWP1及びWP3における第1の最良フォーカス位置B0,p,1及びB0,p,3(p=1〜13)を求める。また、F=2のときに転写されたテストパターンのレジスト像の線幅値に基づいて第3の最良フォーカス位置B2,p,q(p=1〜13、q=2〜4)を求める。
次のステップ513では、Y軸方向に隣り合う2つの計測点(Xp、Yq+1)と(Xp、Yq)のZ高さの差を求めるために、第3の最良フォーカス位置B2,p,q+1と第1の最良フォーカス位置B0,p,qの差(以下、「第2のフォーカス差」という)ΔDYp,q(p=1〜13、q=1〜3)を、次の(11)式を用いて算出する。
ΔDYp,q=B2,p,q+1-B0,p,q ……(11)
そして、次のステップ515では、上記の如く計測点(Xp、Y2)におけるZ高さDp,2(p=1〜13)が、すでに求められているので、次の(12)式に示されるように、Z高さDp,2から第2のフォーカス差ΔDYp,1を減算することにより、計測点(Xp、Y1)におけるZ高さDp,1(p=1〜13)を求めることができる。
Dp,1=Dp,2-ΔDYp,1 ……(12)
また、同様に、次の(13)式に示されるように、Z高さDp,2に第2のフォーカス差ΔDYp,2を加算することにより、計測点(Xp、Y3)におけるZ高さDp,3(p=1〜13)を求めることができる。
Dp,3=Dp,2+ΔDYp,2 ……(13)
さらに、次の(14)式に示されるように、上記(13)式を用いて得られたZ高さDp,3に、第2のフォーカス差ΔDYp,3を加算することにより、計測点(Xp、Y4)におけるZ高さDp,4(p=1〜13)を求める。
Dp,4=Dp,3+ΔDYp,3 ……(14)
以上の如くして、Z高さDp,q(p=1〜13、q=1〜4)が得られると、ウエハWTの表面形状情報を算出するサブルーチン439の処理を終了し、図4のメインルーチンにリターンし、ステップ441、すなわち上記ステップ439で算出されたウエハWTの表面形状に基づいて、各計測点での最良フォーカス位置の補正を行なうサブルーチンに移行する。なお、Z高さDp,qに基づいて、例えば双3次バイスプライン曲線等を作成することにより、ウエハWTの相対的な3次元表面形状情報を求めることができる。
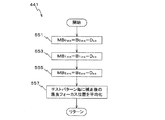
ステップ441のサブルーチンでは、まず、図13のステップ551において、次の(15)式に示されるように、第1の最良フォーカス位置B0,p,qからZ高さDp,qを減算することにより、ウエハWTの表面形状の補正を行ない、補正後の最良フォーカス位置MB0,p,q(p=1〜13、q=1〜3)を求める。
MB0,p,q=B0,p,q-Dp,q ……(15)
これにより、一例として図12(C)に示されるように、ウエハWTの表面形状の影響が除去された最良フォーカス位置を得ることができる。なお、図12(C)では、便宜上、q=2の場合についてのみ示されている。
次のステップ553では、次の(16)式に示されるように、第2の最良フォーカス位置B1,p,qからZ高さDp,qを減算することにより、ウエハWTの表面形状の補正を行ない、補正後の最良フォーカス位置MB1,p,q(p=2〜13、q=1〜3)を求める。
MB1,p,q=B1,p,q-Dp,q ……(16)
次のステップ555では、次の(17)式に示されるように、第3の最良フォーカス位置B2,p,qからZ高さDp,qを減算することにより、ウエハWTの表面形状の補正を行ない、補正後の最良フォーカス位置MB2,p,q(p=1〜13、q=2〜4)を求める。
MB2,p,q=B2,p,q-Dp,q ……(17)
次のステップ557では、テストパターン毎に補正後の最良フォーカス位置を平均化する。すなわち、次の(18)式に示されるように、同一のテストパターンの転写像に基づく補正後の最良フォーカス位置を平均化し、新たにテストパターンPUi,jの最良フォーカス位置AMBi,j(i=1〜3、j=1〜13)を求める。
AMBi,j=(MB0,p,q+MB1,p+1,q+MB2,p,q+1)/3 ……(18)
上記(18)式では、i=q、j=pの関係が成立している。そこで、例えば最良フォーカス位置AMB2,8は、次の(19)式を用いて算出される。
AMB2,8=(MB0,8,2+MB1,9,2+MB2,8,3)/3 ……(19)
以上の如くして、最良フォーカス位置AMBi,jが得られると、ステップ441での最良フォーカス位置の補正を行うサブルーチンの処理を終了し、図4のメインルーチンのステップ443にリターンする。
このステップ443では、最良フォーカス位置AMBi,jを統計処理(例えば、最小自乗法)し、像面湾曲情報を求める。そして、得られた像面湾曲情報を記憶装置27に保存する。なお、最良フォーカス位置AMBi,jに基づいて、例えば双3次バイスプライン曲線等を作成することにより3次元の像面湾曲情報を得ることができる。
このようにして求められた像面湾曲情報は、図示しないネットワーク(例えば、イントラネット)を介して、ファイル転送などにより管理者等に通知することが可能である。
次に、デバイス等の製造における、本実施形態の露光装置100による露光動作を説明する。
前提として、上述のようにして計測された投影光学系PLの像面湾曲情報が、主制御装置28の記憶装置27に格納されているものとする。
主制御装置28は、露光に先立って、この像面湾曲情報に基づいて、図示しない結像特性補正コントローラに指示し、例えば投影光学系PLの少なくとも1つの光学素子(本実施形態では、レンズエレメント)の位置(他の光学素子との間隔を含む)あるいは傾斜などを変更することにより、その像面湾曲が補正されるように投影光学系PLの結像特性を可能な範囲で補正する。なお、投影光学系PLの結像特性の調整に用いる光学素子は、レンズエレメントなどの屈折光学素子だけでなく、例えば凹面鏡などの反射光学素子、あるいは投影光学系PLの収差(ディストーション、球面収差など)、特にその非回転対称成分を補正する収差補正板などでも良い。さらに、投影光学系PLの結像特性の補正方法は光学素子の移動に限られるものではなく、例えば露光光源を制御して照明光ILの中心波長を僅かにシフトさせる方法、又は投影光学系PLの一部で屈折率を変化させる方法などを単独、あるいは光学素子の移動との組み合わせで採用しても良い。
そして、主制御装置28は、不図示のレチクルローダに指示し、転写したいパターンが形成されたレチクルRをレチクルステージRST上にロードする。同様に、不図示のウエハローダにより、露光したいウエハWをウエハテーブル18上にロードする。
次に、主制御装置28により、不図示のレチクルアライメント顕微鏡、ウエハテーブル18上の基準マーク板FP、アラインメント検出系AS等を用いて、レチクルアラインメント、アラインメント検出系のベースライン計測及びEGA(エンハンスト・グローバル・アラインメント)等のウエハアライメント等の準備作業が所定の手順に従って行われる。
露光動作にあたって、まず、ウエハWのXY位置が、ウエハW上の最初のショット領域(ファーストショット)の露光のための加速開始位置(走査開始位置)となるように、XYステージ20が移動される。この移動は、主制御装置28により、レーザ干渉計26によって計測されたウエハWのXY位置情報(又は速度情報)に基づき、ウエハステージ駆動系22を介して行われる。
さらに、レチクルRの位置が加速開始位置(走査開始位置)となるようにレチクルステージRSTが移動される。この移動は、主制御装置28により、レチクル干渉計21によって計測されたレチクルステージRSTの位置情報に基づき、レチクルステージ駆動系29を介して行われる。
このようにして、ウエハW及びレチクルRが所定の位置に移動すると、主制御装置28は、フォーカスセンサAFSによって検出されたウエハWのZ軸方向の位置情報に基づき、前述した光学特性補正後の投影光学系PLの像面の焦点深度の範囲内にウエハW表面の露光対象のショット領域が収まるように、ウエハステージ駆動系22を介してウエハテーブル18をZ軸方向及び傾斜方向に駆動して露光面位置の調整を行う。
そして、主制御装置28は、レチクルステージRSTとXYステージ20の相対走査を開始する。そして両ステージがそれぞれの目標走査速度に達し、等速同期状態に達すると、照明系IOPからの照明光ILによってレチクルRのパターン領域が照明され始め、走査露光が開始される。上記の相対走査は、レーザ干渉計26及びレチクル干渉計21の計測値をモニタしつつ、ウエハステージ駆動系22及びレチクルステージ駆動系29を制御することにより行われる。そして、レチクルRのパターン領域の異なる領域が照明光ILで逐次照明され、パターン領域全面に対する照明が完了することにより走査露光が終了する。これにより、レチクルRのパターンが投影光学系PLを介してウエハW上のファーストショット領域に縮小転写される。
このようにしてファーストショット領域に対する露光、すなわちレチクルパターンの転写が終了すると、ウエハWが次のショット領域の露光のための加速開始位置(走査開始位置)となるようにXYステージ20がステッピングされて、前ショット領域と同様に走査露光が行われる。
以後、このようにして、ステッピングと走査露光とが順次繰り返され、ウエハW上に必要なショット数のパターンが転写される。
これまでの説明から明らかなように、本実施形態では、主制御装置28内のCPU及び該CPUによって実行されるソフトウェアプログラムによって、性能情報計測装置が実現されている。すなわち、CPUによって実行される図4のステップ407〜421の処理にて第1の像形成装置が実現され、図4のステップ423→425→409→・・・・→421の処理にて第2の像形成装置が実現され、図9のステップ505の処理にて第1のフォーカス情報取得装置及び第2のフォーカス情報取得装置とが実現され、図9のステップ507〜515の処理にて形状情報取得装置が実現され、図4のステップ441、443の処理にて算出装置が実現されている。なお、上記ソフトウェアによって実現される構成各部の少なくとも一部を、ハードウェアによって構成しても勿論構わない。
以上詳細に説明したように、本実施形態に係る露光装置の性能情報計測方法によると、ウエハWT上の複数の計測点に転写されたテストパターンの像の線幅値に基づいて最良フォーカス位置が計測され、同一のテストパターンに由来する最良フォーカス位置の差に基づいてウエハWTの表面形状情報が得られ、さらに該表面形状情報に基づいて最良フォーカス位置に含まれるウエハWTの表面形状に依存する成分が補正され、その補正結果に基づいて投影光学系PLの像面湾曲が求められる。すなわち、ウエハWTの表面が平坦でなくとも精度良く投影光学系PLの像面湾曲を計測することができるため、高価な超平坦度ウエハ等を用いる必要がない。しかも、ウエハWTの表面形状に依存する成分を補正しているために、従来と同等の計測点数であっても、従来に比べて精度良く投影光学系PLの像面湾曲を計測することができる。従って、結果的に、スループットを低下させることなく、低コストで精度良く投影光学系PLの像面湾曲を計測することが可能となる。
また、本実施形態では、レチクルRTにテストパターンPUi,jがY軸方向に3個、X軸方向に13個のマトリックス状に2次元配置されているために、複数の計測点での最良フォーカス位置を同時に求めることができる。従って、計測のスループットを向上させることができる。
さらに、本実施形態では、前述の如く、図4のステップ423において、X軸方向に隣り合う転写領域間の距離WLxだけ、ウエハWTをX軸方向にシフトしているために、効率良くウエハWTのX軸方向に関する表面形状情報を求めることができる。同様に、図4のステップ429において、Y軸方向に隣り合う転写領域間の距離WLyだけ、ウエハWTをY軸方向にシフトしているために、効率良くウエハWTのY軸方向に関する表面形状情報を求めることができる。従って、計測のスループットをさらに向上させることが可能となる。
また、本実施形態では、計測点(X1、Y2)を基準位置としているために、算出されるウエハWTの表面形状は、実際の表面形状と完全には一致しない場合があるが、像面湾曲を計測する場合は、露光エリア内の相対的な最良フォーカス位置が計測できれば良いため、像面湾曲の測定精度に悪影響を及ぼすものではない。
さらに、本実施形態では、ウエハWTのフォーカス位置が目標値と一致するようにウエハテーブル18を駆動する際(図4のステップ411)に、レベリング機能を動作させないようにしている。その理由について以下に説明する。
ここでは、一例として、F=0のときはレベリング機能を動作させず、F=1のときはレベリング機能を動作させる場合について説明する。なお、F=1のときにレベリング機能を動作させること以外は、本実施形態と同様にしてテストパターンPUi,jがウエハWT’上に転写されたものとする。
そして、前記と同様にウエハWT’上の計測点(Xp、Yq)のZ高さをDz’p,qとし、ウエハWTの表面が平坦であると仮定したときにテストパターンPUi,jを用いて得られる仮想的な最良フォーカス位置をH’i,jとする。また、計測点(Xp、Yq)において計測される第1の最良フォーカス位置をB’0,p,q、第2の最良フォーカス位置をB’1,p,qとする。
この場合、例えば、計測点(Xp、Y2)における第1の最良フォーカス位置B’0,p,2は、次の(19)式で示されるように、仮想的な最良フォーカス位置H’i,2とZ高さDz’P,2とが加算されたものと考えることができる。一方、計測点(Xp+1、Y2)における第2の最良フォーカス位置B’1,p+1,2は、次の(20)式で示されるように、仮想的な最良フォーカス位置H’i,2とZ高さDz’p+1,2と傾斜成分とが加算されたものと考えることができる。なお、ここでは、i=pの関係が成立している。
B'0,p,2=H'i,2+Dz'p,2 ……(19)
B'1,p+1,2=H'i,2+Dz'p+1,2+k・Xp ……(20)
ここで、上記(20)式の右辺第3項は、傾斜成分であり、kはレベリング動作時の傾斜角度に依存する係数である。
ここで、上記(20)式の右辺第3項は、傾斜成分であり、kはレベリング動作時の傾斜角度に依存する係数である。
次に、上記(20)式と(19)式の差を求めると、次の(21)式が得られる。
B'1,p+1,2-B'0,p,2=Dz'p+1,2-Dz'p,2+k・Xp=ΔDX'p,2+k・Xp ……(21)
すなわち、第2の最良フォーカス位置B’1,p+1,2と第1の最良フォーカス位置B’0,p,2の差は、計測点(Xp+1、Y2)と(Xp、Y2)のZ高さの差ΔDX’p,2に、傾斜成分(k・Xp)が付加されたものである。
そこで、ウエハWT’の相対的な表面形状情報を求めるために、本実施形態と同様にして、計測点(X1、Y2)におけるZ軸方向に関する位置を基準位置とし、第2の最良フォーカス位置B’1,p+1,2と第1の最良フォーカス位置B’0,p,2の差を順次積算すると、計測点(Xp、Y2)(p=2〜14)における積算値Sp,2は、次の(22)式で示される。なお、計測点(X1、Y2)が基準位置なので、S1,2=0とする。
Sp,2=Sp-1,2+ΔDX'p-1,2+k・Xp ……(22)
例えば、計測点(X3、Y2)における積算値S3,2は、次の(23)式で示される。
S3,2=S2,2+ΔDX'2,2+k・X3=ΔDX'1,2+ΔDX'2,2+k・(X2+X3)=D'3,2+k・(X2+X3)
…(23)
…(23)
上記(23)式から明らかなように、積算値S3,2は、計測点(X3、Y2)におけるZ高さD’3,2にk・(X2+X3)が付加された値である。
また、例えば、計測点(X10、Y2)における積算値S10,2は、次の(24)式で示される。
S10,2=D'10,2+k・(X2+X3+X4+X5+X6+X7+X8+X9+X10) ……(24)
上記(24)式から明らかなように、積算値S10,1は、計測点(X10、Y1)におけるZ高さD’10,2にk・(X2+X3+X4+X5+X6+X7+X8+X9+X10)が付加された値である。
このように、積算値Sp,2は、本実施形態での積算値Dp,2と異なり、計測点の座標値に依存する傾斜成分を含むため、ウエハWT’の表面形状情報を精度良く得ることが困難となる。
すなわち、ウエハWT’のフォーカス位置が目標値と一致するようにウエハテーブル18を駆動する際に、レベリング機能を動作させるとウエハWT’の表面形状情報の測定精度を低下させるおそれがある。しかしながら、本実施形態では、レベリング機能は動作させないようにしているために、精度良くウエハWTの表面形状情報を求めることができる。
さらに、本実施形態では、各レジスト像の線幅計測に、露光装置100に設けられるアライメント検出系ASを利用しているために、オペレータなどが介在することなく、前述の計測結果に基づいて投影光学系PLを調整することができる。すなわち、露光装置に自動調整機能を持たせることが可能となる。
また、本実施形態に係る露光方法によると、上述のようにして最適な転写が行なえるように投影光学系PLの光学特性が調整され、その調整された投影光学系PLを介してレチクルパターンをウエハW上に転写するので、微細パターンをウエハW上に高精度に転写することが可能となる。
なお、上記実施形態では、アライメント検出系ASを用いて線幅を計測する場合について説明しているが、これに限らず、例えばSEMや電気抵抗法(ECD)等を利用した線幅計測装置により各レジスト像の線幅を求めても良い。そして、線幅計測装置等にて計測された線幅値を、図示しないネットワーク等を介して露光装置100に通知することにより、主制御装置28は、その線幅値に基づいて前述と同様にして投影光学系PLの像面湾曲を算出しても良い。勿論、オペレータ等が図示しない入力装置を介して線幅計測装置等にて計測された線幅値を入力しても良い。特に、電気抵抗法(ECD)を利用すると、ほぼ同時に複数の線幅を計測することができるため、計測時間を更に短縮することが可能となる。但し、この場合には、計測対象となるラインパターンに電気抵抗計測用の電極パターンを付加する必要がある。
また、上記実施形態では、いわゆるCD−フォーカス法として知られている計測方法を用いて最良フォーカス位置を求める場合について説明しているが、本発明がこれに限定されるものではない。
例えば、いわゆるSMPフォーカス計測法として知られている計測方法を用いても良い。この方法では、複数のフォーカス位置で、くさび形マークのレジスト像をウエハ上に形成し、フォーカス位置の違いによるレジスト像の線幅値の変化を長手方向の寸法変化に増幅させて置き換え、レジスト像の長手方向の長さを計測する。そして、フォーカス位置とレジスト像の長さとの相関関係を示す近似曲線の極大値近傍を所定のスライスレベルでスライスし、得られたフォーカス位置の範囲の中点を最良フォーカス位置と判断する。
また、いわゆるオーバー露光フォーカス計測法として知られている計測方法を用いても良い。この方法では、露光量を変更しながら、テスト用のパターンを複数のフォーカス位置でウエハ上に転写する。そして、フォーカス位置毎に、ウエハ上におけるテスト用のパターンのレジスト像の有無を判定することにより、レジスト像が消失するときの露光量を計測し、フォーカス位置と計測した露光量との相関関係を示す近似曲線の極大値を最良フォーカス位置と判断する。
さらに、レジスト像の形成状態に関する情報としては、線幅情報に限らず、例えば、レジスト像のコントラスト情報を用いても良い。
なお、上記実施形態では、Y軸方向に3個、X軸方向に13個のマトリックス状にテストパターンが配置されたレチクルRTを用いているが、本発明がこれに限定されないのは勿論である。
また、上記実施形態では、テストパターンとして、10種類のL/Sパターンを用いる場合について説明しているが、これに限らず、例えば、いずれか1つを用いても良い。さらに、L/Sパターンのデューティ比やラインパターンの数等も任意に設定することができる。また、L/Sパターンに限らず、例えば、くさび形のパターン等であっても良い。要するに、最良フォーカス位置が計測できれば良いので、その計測手法に応じたテストパターンを用いれば良い。
さらに、上記実施形態では、異なるフォーカス位置で転写する際に、ウエハWTをY軸方向に距離ΔY1だけシフトしているが、X軸方向に次の(25)式で示される距離ΔX1だけシフトしても良い。
ΔX1=PDx・β ……(25)
ここで、PDxは、テストパターンPUi,jのX軸方向の長さである(図3参照)。なお、転写領域が重ならなければ、シフト量はΔY1及びΔX1以外であっても良い。要するに、計測点毎に最良フォーカス位置が計測できれば良い。
ここで、PDxは、テストパターンPUi,jのX軸方向の長さである(図3参照)。なお、転写領域が重ならなければ、シフト量はΔY1及びΔX1以外であっても良い。要するに、計測点毎に最良フォーカス位置が計測できれば良い。
また、上記投影光学系PLの像面湾曲の計測を、ウエハWTの複数箇所で繰り返し行ない、得られた複数の像面湾曲情報を平均化することによりさらに精度良く投影光学系PLの像面湾曲を求めることができる。さらに、複数のウエハで得られた各像面湾曲情報を平均化しても良い。
なお、上記実施形態では、ウエハWTのフォーカス位置の目標値として9種類(m=1〜9)の場合について説明しているが、勿論、本発明がこれに限定されるものではない。
さらに、上記実施形態では、Y座標値がY2でのX軸方向に隣り合う計測点間のZ高さの差と、X座標値がX1〜X13でのY軸方向に隣り合う計測点間のZ高さの差とに基づいてウエハWTの表面形状情報を求めているが、これに限らず、例えばY座標値がY1〜Y3でのX軸方向に隣り合う計測点間のZ高さの差と、X座標値がX1でのY軸方向に隣り合う計測点間のZ高さの差とに基づいてウエハWTの表面形状情報を求めても良い。すなわち、計測点(X1、Y1)を基準位置としてY座標値がY1でのX軸方向に隣り合う計測点間のZ高さの差を求め、計測点(X1、Y2)を基準位置としてY座標値がY2でのX軸方向に隣り合う計測点間のZ高さの差を求め、計測点(X1、Y3)を基準位置としてY座標値がY3でのX軸方向に隣り合う計測点間のZ高さの差を求める。次に計測点(X1、Y1)と計測点(X1、Y2)とのZ高さの差及び計測点(X1、Y3)と計測点(X1、Y2)とのZ高さの差を求め、計測点(X1、Y2)を基準位置とするようにY座標値がY1でのX軸方向に隣り合う計測点間のZ高さの差及びY座標値がY3でのX軸方向に隣り合う計測点間のZ高さの差を補正する。そして、補正されたZ高さの差を用いてウエハWTの表面形状情報を求める。
なお、上記実施形態では、計測点(X1、Y2)を基準位置としているが、本発明はこれに限定されるものではない。
また、上記実施形態では、投影光学系PLの光学特性として、像面湾曲を求める場合について説明しているが、これに限らず、例えば像面傾斜であっても良い。
なお、上記実施形態では、テストパターンの転写像が形成されたウエハWTを現像した後、ウエハWT上に形成されたレジスト像に対して像の線幅値を計測しているが、これに限定されるものではなく、例えば、ウエハを現像することなくウエハ上に形成された潜像に対して計測を行っても良いし、レジスト像が形成されたウエハをエッチング処理して得られる像(エッチング像)などに対して計測を行っても良い。
また、本実施形態では、ウエハWT上における像の形成状態を検出するための感光層がフォトレジストの場合について説明しているが、感光層はフォトレジストに限らず、光(エネルギ)の照射によって像(潜像及び顕像)が形成されるものであれば良い。例えば、光照射によって着色したり、屈折率、透過率及び反射率等が変化する感光層であっても良い。さらに、光磁気記録層などであっても良く、従って、感光層が形成される物体もウエハ又はガラスプレート等に限らない。
さらに、レチクルステージRSTとXYステージ20とを同期移動してレチクルパターンを投影光学系PLを介してウエハW上に転写する際の、XYステージ20の移動面の傾斜及びうねり情報を求めることができる。なお、前提として、予め上記実施形態と同様にして投影光学系PLの像面湾曲及び像面傾斜が計測され、前述した如く、図示しない結像特性補正コントローラ等にて投影光学系PLの像面湾曲及び像面傾斜が補正されているものとする。ここでは、走査方向に複数の計測点が必要となるため、一例として図14に示されるように、複数の計測用パターンがパターン領域PAの中心を通る走査方向に等間隔で配置されたレチクルRT’が用いられる。そして、露光の際にレチクルステージRSTとXYステージ20を同期移動させること以外は上記実施形態と同様にして、計測用パターンをウエハW’上に転写する。なお、走査露光時にはフォーカスセンサAFSは動作させない。また、X軸方向に関する表面形状情報は不要なので上記実施形態におけるF=1での処理は省略できる。次に、上記実施形態と同様にしてウエハW’のY軸方向に関する表面形状情報を算出し、該算出結果に基づいて、計測点毎にウエハの表面形状に依存する成分を補正した最良フォーカス位置を求める。そして、各計測点での補正後の最良フォーカス位置を比較し、XYステージ20の移動面の傾斜及びうねり情報を求める。すなわち、ウエハW’の表面が平坦でなくとも精度良くXYステージ20の移動面の傾斜及びうねり情報を計測することができるため、高価な超平坦度ウエハ等を用いる必要がない。しかも、ウエハW’の表面形状に依存する成分を補正しているために、従来と同等の計測点数であっても、従来に比べて精度良くXYステージ20の移動面の傾斜及びうねり情報を計測することができる。従って、結果的に、スループットを低下させることなく、低コストで精度良くXYステージ20の移動面の傾斜及びうねり情報を計測することが可能となる。なお、XYステージ20の移動方向によるオフセットが存在するため、XYステージ20を+Y方向に移動する場合と、−Y方向に移動する場合のそれぞれについて移動面の傾斜及びうねり情報を計測する。
そして、デバイス等の製造に際して、上記実施形態の露光装置100では、上述の如くしてXYステージ20の移動面の傾斜及びうねり情報が計測され、傾斜及びうねりが低減するようにレチクルステージRSTとXYステージ20を同期制御しながら露光が行われるため、微細パターンをウエハW上に高精度に転写することが可能となる。
また、上記実施形態では、本発明がステップ・アンド・スキャン方式の走査型露光装置に適用された場合について説明したが、本発明の適用範囲がこれに限定されないのは勿論である。すなわち、ステップ・アンド・リピート方式、ステップ・アンド・スティッチ方式、ミラープロジェクション・アライナー、及びフォトリピータなどにも好適に適用することができる。さらに、投影光学系PLは、屈折系、反射屈折系、及び反射系のいずれでもよいし、縮小系、等倍系、及び拡大系のいずれでも良い。
さらに、本発明が適用される露光装置の光源は、KrFエキシマレーザやArFエキシマレーザに限らず、F2レーザ(波長157nm)、あるいは他の真空紫外域のパルスレーザ光源であっても良い。この他、露光用照明光として、例えば、DFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイッテルビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。
また、本発明は、半導体素子の製造に用いられる露光装置だけでなく、液晶表示素子、プラズマディスプレイなどを含むディスプレイの製造に用いられる、デバイスパターンをガラスプレート上に転写する露光装置、薄膜磁気へッドの製造に用いられる、デバイスパターンをセラミックウエハ上に転写する露光装置、撮像素子(CCDなど)、マイクロマシン、及びDNAチップなどの製造、さらにはマスク又はレチクルの製造に用いられる露光装置などにも適用することができる。
以上説明したように、本発明の露光装置の性能情報計測方法及び性能情報計測装置は、露光装置の性能を評価するための各種の情報の計測に適している。また、本発明の露光方法は、微細パターンを基板上に転写するのに適している。
100…露光装置、PL…投影光学系、PUi,j…テストパターン(計測用パターン)、R…レチクル(マスク)、RT…レチクル(テスト用マスク)、W…ウエハ(基板、物体)、WT…ウエハ(物体)。
Claims (15)
- 第1面上のパターンを投影光学系を介して第2面上に転写する露光装置の性能を評価するための情報を計測する露光装置の性能情報計測方法であって、
複数の計測用パターンが形成されたマスクを前記第1面上に配置し、前記投影光学系の前記第2面側に配置された表面に感光層を有する物体の位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第1の領域内の複数の部分領域にそれぞれ形成する第1工程と;
前記物体の位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第2の領域内の複数の部分領域にそれぞれ形成する第2工程と;
前記第1工程で形成された前記計測用パターンの像の形成状態に関する情報に基づいて前記投影光学系の第1のフォーカス情報を求める第3工程と;
前記第2工程で形成された前記計測用パターンの像の形成状態に関する情報に基づいて前記投影光学系の第2のフォーカス情報を求める第4工程と;
前記第1のフォーカス情報と前記第2のフォーカス情報とに基づいて、前記物体の表面形状情報を求める第5工程と;を含む露光装置の性能情報計測方法。 - 前記第1のフォーカス情報と前記第2のフォーカス情報と前記表面形状情報とに基づいて、前記露光装置の性能を評価するための情報を求める第6工程を更に含むことを特徴とする請求項1に記載の露光装置の性能情報計測方法。
- 前記第1工程に先だって、前記投影光学系を調整する第7工程を更に含み、前記第1工程及び第2工程では、前記マスクと前記物体とを同期移動させつつ前記計測用パターンの像を前記物体上に形成することを特徴とする請求項2に記載の露光装置の性能情報計測方法。
- 前記露光装置の性能を評価するための情報は、前記投影光学系の光学特性に関する情報を含むことを特徴とする請求項2に記載の露光装置の性能情報計測方法。
- 前記第1工程に先だって、前記投影光学系の光学特性に関する情報に基づいて、前記投影光学系を調整する工程を更に含む請求項4に記載の露光装置の性能情報計測方法。
- 前記露光装置の性能を評価するための情報は、前記物体の走査特性に関する情報を含むことを特徴とする請求項2〜5のいずれか一項に記載の露光装置の性能情報計測方法。
- 前記第1工程及び第2工程では、前記物体の前記投影光学系の光軸方向の位置変化は、前記物体を傾斜させることなく行なうことを特徴とする請求項1〜6のいずれか一項に記載の露光装置の性能情報計測方法。
- 前記物体の表面形状情報は、前記第1のフォーカス情報と第2のフォーカス情報との差に基づいて算出されることを特徴とする請求項1〜7のいずれか一項に記載の露光装置の性能情報計測方法。
- 前記計測用パターンは、特定の方向に等間隔で配置されていることを特徴とする請求項1〜8のいずれか一項に記載の露光装置の性能情報計測方法。
- 前記特定の方向に関する前記計測用パターン間の距離をLとし、前記投影光学系の投影倍率をMとすると、前記第1の領域と第2の領域との前記特定の方向に関する距離はL×Mであることを特徴とする請求項9に記載の露光装置の性能情報計測方法。
- 前記計測用パターンは、ラインアンドスペースパターンを含むことを特徴とする請求項1〜10のいずれか一項に記載の露光装置の性能情報計測方法。
- 前記計測用パターンの像の形成状態に関する情報は、前記計測用パターンの像の線幅情報を含むことを特徴とする請求項1〜11のいずれか一項に記載の露光装置の性能情報計測方法。
- マスクのパターンを投影光学系を介して基板ステージに保持された基板上に転写する露光装置の性能を評価するための情報を計測する性能情報計測装置であって、
前記基板ステージの位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して計測用パターンの像を前記基板ステージに保持された表面に感光層を有する物体上の第1の領域内の複数の部分領域にそれぞれ形成する第1の像形成装置と;
前記基板ステージの位置を前記投影光学系の光軸方向に変化させ、その光軸方向の位置毎に、前記投影光学系を介して前記計測用パターンの像を前記物体上の第2の領域内の複数の部分領域にそれぞれ形成する第2の像形成装置と;
前記第1の像形成装置にて形成された前記計測用パターンの像の形成状態に基づいて前記投影光学系の第1のフォーカス情報を求める第1のフォーカス情報取得装置と;
前記第2の像形成装置にて形成された前記計測用パターンの像の形成状態に基づいて前記投影光学系の第2のフォーカス情報を求める第2のフォーカス情報取得装置と;
前記第1のフォーカス情報と前記第2のフォーカス情報とに基づいて、前記物体の表面形状情報を求める形状情報取得装置と;
前記第1のフォーカス情報と前記第2のフォーカス情報と前記表面形状情報とに基づいて、前記露光装置の性能を評価するための情報を算出する算出装置と;を含む性能情報計測装置。 - 露光用のエネルギビームをマスクに照射し、前記マスクに形成されたパターンを投影光学系を介して基板上に転写する露光方法であって、
請求項4に記載の露光装置の性能情報計測方法によって計測された前記投影光学系の光学特性に関する情報を考慮して前記投影光学系を調整する工程と;
前記調整された投影光学系を介して前記マスクに形成されたパターンを前記基板に転写する工程と;を含む露光方法。 - マスクと基板とを同期移動して、前記マスクのパターンを投影光学系を介して基板上に転写する露光方法であって、
請求項6に記載の露光装置の性能情報計測方法によって前記基板の走査特性に関する情報を計測する工程と;
前記マスクと前記基板とを同期移動するとともに、該同期移動中に前記走査特性に関する情報の計測結果を考慮して前記基板の位置を制御しつつ、前記マスクのパターンを前記投影光学系を介して前記基板上に転写する工程と;を含む露光方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111177A JP2005294742A (ja) | 2004-04-05 | 2004-04-05 | 露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111177A JP2005294742A (ja) | 2004-04-05 | 2004-04-05 | 露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005294742A true JP2005294742A (ja) | 2005-10-20 |
Family
ID=35327298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004111177A Pending JP2005294742A (ja) | 2004-04-05 | 2004-04-05 | 露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005294742A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008038751A1 (en) * | 2006-09-28 | 2008-04-03 | Nikon Corporation | Line width measuring method, image forming status detecting method, adjusting method, exposure method and device manufacturing method |
| JP2022114213A (ja) * | 2021-01-26 | 2022-08-05 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
-
2004
- 2004-04-05 JP JP2004111177A patent/JP2005294742A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008038751A1 (en) * | 2006-09-28 | 2008-04-03 | Nikon Corporation | Line width measuring method, image forming status detecting method, adjusting method, exposure method and device manufacturing method |
| JP2022114213A (ja) * | 2021-01-26 | 2022-08-05 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
| JP7549540B2 (ja) | 2021-01-26 | 2024-09-11 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112180696B (zh) | 检测装置、曝光装置和物品制造方法 | |
| US7948616B2 (en) | Measurement method, exposure method and device manufacturing method | |
| JP2009295932A (ja) | 露光装置及びデバイス製造方法 | |
| US20020037460A1 (en) | Stage unit, measurement unit and measurement method, and exposure apparatus and exposure method | |
| JPS6028137B2 (ja) | 工作物上にマスクをコピ−する方法 | |
| US20090009739A1 (en) | Exposure apparatus and method for manufacturing device | |
| JP4905617B2 (ja) | 露光方法及びデバイス製造方法 | |
| JP5428671B2 (ja) | 露光方法、デバイス製造方法、及び露光システム | |
| US8149385B2 (en) | Alignment unit and exposure apparatus | |
| JPWO2004092865A1 (ja) | 選出方法、露光方法、選出装置、露光装置、並びにデバイス製造方法 | |
| JP2009224523A (ja) | 露光方法、露光装置及びデバイス製造方法 | |
| JP6015930B2 (ja) | 露光方法及び露光装置、並びにデバイス製造方法 | |
| JPH10189443A (ja) | 位置検出用マーク、マーク検出方法及びその装置並びに露光装置 | |
| JP4078683B2 (ja) | 投影露光装置及び投影露光方法並びに走査露光方法 | |
| JP3651630B2 (ja) | 投影露光方法及び投影露光装置 | |
| JP4596166B2 (ja) | 位置検出方法、露光方法、位置検出装置、露光装置及びデバイス製造方法 | |
| JP2006148013A (ja) | 位置合わせ方法及び露光方法 | |
| US20070262268A1 (en) | Method for imaging a pattern onto a target portion of a substrate | |
| JP2005294742A (ja) | 露光装置の性能情報計測方法及び性能情報計測装置、並びに露光方法 | |
| JP4029360B2 (ja) | 投影露光装置及び投影露光方法並びに走査露光方法 | |
| JP5630627B2 (ja) | 検出方法、光学特性計測方法、露光方法及び露光装置、並びにデバイス製造方法 | |
| JP2009283795A (ja) | アライメント検出系、露光装置およびデバイス製造方法 | |
| JP2006108533A (ja) | 位置検出方法及び露光方法 | |
| JP2005064369A (ja) | 最適化方法、露光方法、最適化装置、露光装置、デバイス製造方法、及びプログラム、並びに情報記録媒体 | |
| JP2004079585A (ja) | 結像特性計測方法及び露光方法 |