JP2005293684A - 搬送制御装置、その方法、搬送装置、および、ディスク装置 - Google Patents
搬送制御装置、その方法、搬送装置、および、ディスク装置 Download PDFInfo
- Publication number
- JP2005293684A JP2005293684A JP2004105055A JP2004105055A JP2005293684A JP 2005293684 A JP2005293684 A JP 2005293684A JP 2004105055 A JP2004105055 A JP 2004105055A JP 2004105055 A JP2004105055 A JP 2004105055A JP 2005293684 A JP2005293684 A JP 2005293684A
- Authority
- JP
- Japan
- Prior art keywords
- conveyed
- detection
- opening
- symmetry axis
- transported
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 31
- 238000001514 detection method Methods 0.000 claims description 286
- 230000008569 process Effects 0.000 claims description 16
- 230000010365 information processing Effects 0.000 claims description 15
- 238000012546 transfer Methods 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 5
- 230000004308 accommodation Effects 0.000 claims description 3
- 230000003287 optical effect Effects 0.000 abstract description 229
- 230000002093 peripheral effect Effects 0.000 abstract description 31
- 230000032258 transport Effects 0.000 description 100
- 238000010586 diagram Methods 0.000 description 40
- 238000012545 processing Methods 0.000 description 16
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 15
- 238000003780 insertion Methods 0.000 description 10
- 230000037431 insertion Effects 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 238000007599 discharging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 238000010977 unit operation Methods 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/02—Details
- G11B17/04—Feeding or guiding single record carrier to or from transducer unit
- G11B17/05—Feeding or guiding single record carrier to or from transducer unit specially adapted for discs not contained within cartridges
- G11B17/051—Direct insertion, i.e. without external loading means
Landscapes
- Feeding And Guiding Record Carriers (AREA)
Abstract
【課題】 ディスク状の被搬送物を良好に搬出するディスク装置を提供する。
【解決手段】 ケース体110の開口部の近傍に、ガイド部材および搬送ローラにて光ディスクを搬送するディスク搬送部300を配設する。開口部の近傍に光ディスク10を検出する検出手段500を配設する。光ディスク10の搬出時、光ディスク10の外周縁が当接してスライド部材510,520がスライドし、検知スイッチSW1〜SW4が適宜オンオフする。これらのオンオフのタイミングの時間差により、光ディスクの中心の移動軌跡と開口部の中心における搬送方向の直線である対称軸との関係を判断し、移動軌跡に応じて搬送モータの駆動状態を制御する。搬出完了時の進出量が一定となる。
【選択図】 図1
Description
前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から略等距離で前記開口部の開口縁近傍に1対配設され前記被搬送物を検出する検出部を用い、これら検出により前記被搬送物の検出時の時間差を認識し、この認識した時間差が所定時間以上である場合には、前記搬出手段による駆動動作の停止時期を変更する制御をすることを特徴とする搬送制御方法である。
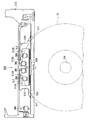
図1は、本発明の一実施の形態に係るディスク装置の概略構成を示す一部を切り欠いた平面図である。図2は、ディスク装置の概略構成を示す一部を切り欠いた平面図であり、光ディスクの略半分が挿入された状態を説明する図である。図3は、ディスク搬送部の概略構成を示す概念図で、光ディスクを搬送している状態を説明する図である。図4は、ディスク装置の検出手段近傍を示す一部を切り欠いた平面図であり、光ディスクの挿入当初の状態を説明する図である。図5は、ディスク装置の検出手段近傍を示す一部を切り欠いた平面図であり、光ディスクの搬出時に位置ずれが生じている状態を説明する図である。
次に、上記一実施の形態におけるディスク装置100の動作を図面に基づいて説明する。図6は、光ディスクの搬出時の中心の移動軌跡の状況を検知スイッチとの関係で示す説明図である。図7ないし図11は、各移動軌跡の場合の検知スイッチの波形図で、(A)は検知スイッチSW1の波形図、(B)は検知スイッチSW2の波形図、(C)は検知スイッチSW3の波形図、(D)は検知スイッチSW4の波形図であり、図7は移動軌跡Aの場合、図8は移動軌跡Bの場合、図9は移動軌跡Cの場合であって光ディスク10の中心が対称軸X上に戻る場合、図10は移動規制Cの場合であって光ディスクの中心が対称軸X上に戻らない場合、図11は移動軌跡Dの場合、図12は移動軌跡Eの場合を示す。
上述したように、上記一実施の形態では、開口部の略中央における光ディスク10の搬送方向に対する光ディスク10の中心位置と基準の移動経路となる対称軸Xとの差異を検出手段500により検出し、この光ディスク10の検出状況であるこの光ディスク10の中心における対称軸Xとの差異に応じて搬送モータの駆動を制御する。このため、搬出する際に、光ディスク10が基準となる中央からずれて搬出されることによる搬出の停止タイミングがずれて、光ディスク10が開口部から脱落したり開口部から十分に搬出できずに取り出しにくくなるなどを防止でき、基準の移動経路となる移動軌跡Aで搬出される場合と同様の位置で搬出を完了でき、良好に搬出できる。
なお、本発明は、上述した一実施の形態に限定されるものではなく、本発明の目的を達成できる範囲で以下に示される変形をも含むものである。
(X−x)2+(Y−y)2=(D+d)2
(Xsw1−xsw1)2+(Ysw1−V×Δt1)2=(D+d)2
(Xsw3−xsw3)2+(Ysw3−V×Δt2)2=(D+d)2
V=(xsw1−xsw3)/Δtc
上述したように、開口部の略中央における光ディスク10の搬送方向に対する光ディスク10の中心位置と基準の移動経路となる対称軸Xとの差異を検出手段500により検出し、この光ディスク10の検出状況であるこの光ディスク10の中心における対称軸Xとの差異に応じて搬送モータの駆動を制御する。このため、光ディスク10が位置ずれして搬出されても基準の移動経路となる移動軌跡Aで搬出される場合と同様の位置で搬出を完了でき、良好に搬出できる。
100……ディスク装置
110……ケース体
230……情報処理手段としての光ピックアップ
300……搬出手段としてのディスク搬送部
400……収容検出手段としての搬入検知手段
500……検出手段
A,B,C,D,E…移動経路である移動軌跡
SW1〜SW4…検出部としての検知スイッチ
SW5……検出部としての検知スイッチ
X……対称軸
α……第1の所定時間である時間長
β……第3の所定時間である時間長
γ……第2の所定時間である時間長
ε……所定時間である時間長
δ……時間長
Δt1……第1の時間差である時間差
Δt2……第2の時間差である時間差
Claims (23)
- 搬出手段による駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出させる搬送制御装置であって、
前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から略等距離で前記開口部の開口縁近傍に1対配設され前記被搬送物を検出する検出部と、
これら検出部による前記被搬送物の検出時の時間差を認識し、この時間差が所定時間以上である場合、前記搬出手段による駆動動作の停止時期を変更する制御をする駆動制御手段と、
を具備したことを特徴とした搬送制御装置。 - 請求項1に記載の搬送制御装置であって、
前記駆動制御手段は、前記搬出手段による駆動動作の停止時期を変更する処理として、前記検出部の少なくともいずれか一方が前記被搬送物を検出しなくなった時点から所定の時間長を経過後に前記搬出手段による駆動動作を停止させる制御をする
ことを特徴とした搬送制御装置。 - 請求項2に記載の搬送制御装置であって、
前記駆動制御手段により前記搬出手段の駆動動作を停止させる前記所定の時間長は、前記時間差の大きさに基づいて設定される
ことを特徴とした搬送制御装置。 - 請求項2または請求項3に記載の搬送制御装置であって、
前記所定の時間長は、前記時間差の半分の時間である
ことを特徴とした搬送制御装置。 - 請求項1ないし請求項4のいずれかに記載の搬送制御装置であって、
前記駆動制御手段は、前記一対の検出部における前記被搬送物を検出しなくなった時点が略一致する場合には、前記搬出手段による駆動動作を直ちに停止する制御をする
ことを特徴とした搬送制御装置。 - 請求項1ないし請求項5のいずれかに記載の搬送制御装置であって、
前記検出部は、対称軸から異なる距離で前記開口部の開口縁近傍に複数対配設された
ことを特徴とした搬送制御装置。 - 搬出手段による駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出させる搬送制御装置であって、
前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から異なる距離で前記開口部の開口縁近傍に2対配設され前記被搬送物を検出する検出部と、
これら検出部による前記被搬送物の検出状況に応じて前記搬出手段の駆動を制御する駆動制御手段と、
を具備したことを特徴とした搬送制御装置。 - 搬出手段による駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出させる搬送制御装置であって、
前記開口部の略中央における前記被搬送物の搬出方向に対する前記搬出される被搬送物の中心位置の移動経路の差異を検出する検出手段と、
この検出手段による前記被搬送物の検出状況に応じて前記搬出手段の駆動を制御する駆動制御手段と、
を具備したことを特徴とした搬送制御装置。 - 請求項8に記載の搬送制御装置であって、
前記検出手段は、前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から異なる距離で前記開口部の開口縁近傍に2対配設され前記被搬送物を検出する検出部を備えた
ことを特徴とした搬送制御装置。 - 請求項6、請求項7および請求項9のうちのいずれかに記載の搬送制御装置であって、
前記対称軸から近い位置に配設された一方の対をなす検出部は、前記被搬送物を検出後における前記被搬送物を検出しなくなる時期がほぼ同時の場合に前記被搬送物が前記開口部から搬出される状態となる位置に配設され、
前記対称軸から遠い位置に配設された他方の対をなす検出部における前記被搬送物を検出後における前記被搬送物を検出しなくなる時期がほぼ同時の場合に、前記搬出手段の駆動により前記被搬送物の中心が前記対称軸上に位置して搬出される状態となる位置に配設された
ことを特徴とした搬送制御装置。 - 請求項6、請求項7、請求項9および請求項10のうちのいずれかに記載の搬送制御装置であって、
前記駆動制御手段は、前記搬送手段により搬送される前記被搬送物の中心の移動軌跡が前記対称軸上を移動する状態で、前記対称軸から遠い位置に配設された他方の対をなす検出部における前記被搬送物を検出後における前記被搬送物を検出しなくなる時期がほぼ同時の場合における前記被搬送物が前記開口部から搬出された位置を基準位置とし、この基準位置で前記被搬送物の搬出が完了する状態に前記検出部による前記被搬送物の検出状態に応じて前記搬送手段の駆動状態を制御する
ことを特徴とした搬送制御装置。 - 請求項6、請求項7および請求項9ないし請求項11のうちのいずれかに記載の搬送制御装置であって、
前記駆動制御手段は、前記対称軸に近い位置に配設された一方の対をなす検出部における前記被搬送物を検出する第1の時間差と、前記対称軸から遠い位置に配設された他方の対をなす検出部における前記被搬送物を検出する第2の時間差とに基づいて、前記搬出手段の駆動時間を制御する
ことを特徴とした搬送制御装置。 - 請求項12に記載の搬送制御装置であって、
前記駆動制御手段は、前記対称軸から遠い位置に配設された他方の対をなす検出部における前記被搬送物を検出後における前記被搬送物を検出しなくなる時期がほぼ同時の場合には、前記被搬送物の中心が前記対称軸上に位置すると判断し、この時点で前記搬出手段の駆動を停止する制御をする
ことを特徴とした搬送制御装置。 - 請求項12または請求項13に記載の搬送制御装置であって、
前記駆動制御手段は、前記第1の時間差がほぼ0であって、この第1の時間差より前記第2の時間差が長い時間の場合には、搬送される前記被搬送物の中心における移動軌跡が搬送途中で前記対称軸から外れる状態となったと判断し、前記対称軸から遠い位置に配設された他方の対をなす検出部のいずれか一方が前記被搬送物を検出できなくなってから所定時間経過した第1の所定時間後に前記搬出手段の駆動を停止する制御をし、
前記第1の時間差が0ではなく、この第1の時間差と前記第2の時間差とがほぼ同じ時間長の場合には、搬送される前記被搬送物の中心における移動軌跡が搬送当初から前記対称軸からずれ、その位置ずれの状態で搬送されていると判断し、前記対称軸から遠い位置に配設された他方の対をなす検出部のいずれか一方が前記被搬送物を検出できなくなってから所定時間経過した前記第1の所定時間より長い第2の所定時間後に前記搬出手段の駆動を停止する制御をし、
前記第1の時間差が0ではなく、この第1の時間差とより前記第2の時間差が長い時間の場合には、搬送される前記被搬送物の中心における移動軌跡が搬送当初から前記対称軸からずれ、かつ搬送途中で次第に前記対称軸から外れる状態となったと判断し、前記対称軸から遠い位置に配設された他方の対をなす検出部のいずれか一方が前記被搬送物を検出できなくなってから所定時間経過した前記第2の所定時間より長い第3の所定時間後に前記搬出手段の駆動を停止する制御をする
ことを特徴とした搬送制御装置。 - 請求項14に記載の搬送制御装置であって、
前記第1の所定時間、前記第2の所定時間および前記第3の所定時間は、前記対称軸から遠い位置に配設された他方の対をなす検出部の双方が前記被搬送物を検出できなくなる前に前記駆動制御手段が前記搬出手段の駆動を停止する条件に設定された
ことを特徴とした搬送制御装置。 - 請求項6、請求項7および請求項9ないし請求項15のうちのいずれかに記載の搬送制御装置であって、
前記ケース体内における前記被搬送物の有無を検出する収容検出手段を具備し、
前記駆動制御手段は、前記収容検出手段が前記ケース体内に前記被搬送物がないことを検出している状態で、少なくとも前記対称軸から近い位置に配設された一方の対をなす検出部が前記被搬送物を検出したことを認識すると、前記被搬送物を前記開口部を介して前記ケース体内へ前記被搬送物を搬入する状態に前記搬出手段を駆動させる制御をする
ことを特徴とした搬送制御装置。 - 請求項1ないし請求項16のいずれかに記載の搬送制御装置であって、
前記駆動制御手段は、前記被搬送物の搬出を要求する旨の信号を認識すると、前記搬出手段にて前記被搬送物を搬出させる動作を開始させる
ことを特徴とした搬送制御装置。 - 搬出手段による駆動動作により開口部を介してケース体内からディスク状の搬送物をこの搬送物の径方向に沿って搬出させる搬送制御方法であって、
前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から略等距離で前記開口部の開口縁近傍に1対配設され前記被搬送物を検出する検出部を用い、
これら検出により前記被搬送物の検出時の時間差を認識し、
この認識した時間差が所定時間以上である場合には、前記搬出手段による駆動動作の停止時期を変更する制御をする
ことを特徴とする搬送制御方法。 - 搬出手段による駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出させる搬送制御方法であって、
前記開口部の略中央における前記被搬送物の搬出方向を対称軸としてこの対称軸から異なる距離で前記開口部の開口縁近傍に2対配設され前記被搬送物を検出する検出部を用い、
これら検出部により前記被搬送物の検出状況に応じて前記搬出手段の駆動を制御する
ことを特徴とする搬送制御方法。 - 搬出手段による駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出させる搬送制御方法であって、
前記開口部の略中央における前記被搬送物の搬出方向に対する前記搬出される被搬送物の中心の移動経路の差異を検出する検出手段を用い、
この検出手段による前記被搬送物の検出状況に応じて前記搬出手段の駆動を制御する
ことを特徴とする搬送制御方法。 - 駆動動作により開口部を介してケース体内からディスク状の被搬送物をこの被搬送物の径方向に沿って搬出する搬出手段と、
この搬出手段の駆動を制御する請求項1ないし請求項17のいずれかに記載の搬送制御装置と、
を具備したことを特徴とした搬送装置。 - 請求項21に記載の搬送装置であって、
前記被搬送物は、少なくともいずれか一面に情報が記録される記録面を有したディスク状記録媒体である
ことを特徴とした搬送装置。 - ケース体と、
このケース体内に配設され前記ディスク状記録媒体の記録面に記録された前記情報を読み取る読取処理および前記記録面に前記情報を記録する記録処理のうちの少なくともいずれか一方を実施する情報処理手段と、
請求項22に記載の搬送装置と、
を具備したことを特徴としたディスク装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105055A JP4139795B2 (ja) | 2004-03-31 | 2004-03-31 | 搬送制御装置、その方法、搬送装置、および、ディスク装置 |
| US11/094,513 US7768877B2 (en) | 2004-03-31 | 2005-03-31 | Transfer control device, transfer control method, transfer unit and disc unit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105055A JP4139795B2 (ja) | 2004-03-31 | 2004-03-31 | 搬送制御装置、その方法、搬送装置、および、ディスク装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005293684A true JP2005293684A (ja) | 2005-10-20 |
| JP4139795B2 JP4139795B2 (ja) | 2008-08-27 |
Family
ID=35326460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004105055A Expired - Fee Related JP4139795B2 (ja) | 2004-03-31 | 2004-03-31 | 搬送制御装置、その方法、搬送装置、および、ディスク装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7768877B2 (ja) |
| JP (1) | JP4139795B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008181618A (ja) * | 2007-01-25 | 2008-08-07 | Alpine Electronics Inc | ディスク装置 |
| JP2009181679A (ja) * | 2008-01-31 | 2009-08-13 | Fujitsu Ten Ltd | 光学モジュール、ピックアップ装置及び記録ディスク再生装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5136570A (en) * | 1989-09-14 | 1992-08-04 | Clarion Co., Ltd. | Disc ejecting structure with plurality of disk position sensors |
| US5150349A (en) * | 1989-10-19 | 1992-09-22 | Clarion Co., Ltd. | Disc loading structure |
| US5255255A (en) * | 1990-11-27 | 1993-10-19 | Matsushita Electric Industrial, Co., Ltd. | Disk loading device |
| US6094156A (en) * | 1998-04-24 | 2000-07-25 | Henty; David L. | Handheld remote control system with keyboard |
| JP4209038B2 (ja) | 1999-06-04 | 2009-01-14 | パナソニック株式会社 | ディスクプレーヤ |
| JP2001056994A (ja) | 1999-08-19 | 2001-02-27 | Matsushita Electric Ind Co Ltd | ディスクローディング装置 |
| JP2003208744A (ja) | 2002-01-15 | 2003-07-25 | Kenwood Corp | ディスク装置、ディスク装置の搬送制御方法及びプログラム |
-
2004
- 2004-03-31 JP JP2004105055A patent/JP4139795B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-31 US US11/094,513 patent/US7768877B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008181618A (ja) * | 2007-01-25 | 2008-08-07 | Alpine Electronics Inc | ディスク装置 |
| JP2009181679A (ja) * | 2008-01-31 | 2009-08-13 | Fujitsu Ten Ltd | 光学モジュール、ピックアップ装置及び記録ディスク再生装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060136937A1 (en) | 2006-06-22 |
| US7768877B2 (en) | 2010-08-03 |
| JP4139795B2 (ja) | 2008-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2001076411A (ja) | ディスク収納装置 | |
| JP3754834B2 (ja) | 記録再生装置 | |
| CN100476968C (zh) | 盘驱动器 | |
| JP2012181887A (ja) | ディスクローディング装置およびディスク装置 | |
| JP4139795B2 (ja) | 搬送制御装置、その方法、搬送装置、および、ディスク装置 | |
| JP4017911B2 (ja) | 情報記録媒体搬送装置 | |
| JP2006127680A (ja) | 記録媒体駆動装置 | |
| JP4347889B2 (ja) | 記録媒体駆動装置 | |
| US7385877B2 (en) | Apparatus for transporting discoid record medium and apparatus for recording and/or reproduction | |
| EP1341171B1 (en) | Disk insertion position setting device | |
| JP3402413B2 (ja) | ディスクプレーヤの誤挿入防止装置 | |
| US20110010730A1 (en) | Disc apparatus | |
| JP6265782B2 (ja) | ディスク駆動装置 | |
| EP1843341B1 (en) | Optical disc device | |
| JP4969256B2 (ja) | ディスク装置 | |
| US7594240B2 (en) | Disk drive apparatus | |
| JP3926502B2 (ja) | 記録媒体移送装置 | |
| JP4339892B2 (ja) | 記録媒体駆動装置 | |
| JP4201769B2 (ja) | 光ディスク装置 | |
| JP2010218645A (ja) | ディスクローディング装置およびディスク装置 | |
| KR100234050B1 (ko) | 디스크 로딩장치 | |
| JP2005293665A (ja) | 搬送装置 | |
| JP2006012252A (ja) | ディスク装置およびその装置におけるディスク2枚同時挿入防止方法 | |
| JP2006065978A (ja) | チェンジャ型ディスク装置 | |
| WO2006038512A1 (ja) | ディスク状記録媒体搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070219 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070705 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070814 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080603 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080609 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110613 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |