JP2005293564A - スライディングモード制御器を有する位置制御装置 - Google Patents
スライディングモード制御器を有する位置制御装置 Download PDFInfo
- Publication number
- JP2005293564A JP2005293564A JP2005064832A JP2005064832A JP2005293564A JP 2005293564 A JP2005293564 A JP 2005293564A JP 2005064832 A JP2005064832 A JP 2005064832A JP 2005064832 A JP2005064832 A JP 2005064832A JP 2005293564 A JP2005293564 A JP 2005293564A
- Authority
- JP
- Japan
- Prior art keywords
- equation
- control input
- control device
- servo motor
- expressed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/19—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/047—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators the criterion being a time optimal performance criterion
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B5/00—Anti-hunting arrangements
- G05B5/01—Anti-hunting arrangements electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42352—Sliding mode controller SMC, select other gain
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Human Computer Interaction (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Feedback Control In General (AREA)
- Numerical Control (AREA)
- Control Of Position Or Direction (AREA)
Abstract
【課題】サーボモータとサーボモータによって駆動される移動体を含む制御システムの位置を指令値に十分に追従させると共に、制御システムからフィードバックされた測定位置にオーバシュートが発生することを防止する。
【解決手段】位置制御装置は、位置指令rと制御システムの状態変数xとを受け取り制御入力uをサーボモータへ提供するスライディングモード制御器と、フィードバック速度に基づいて制御入力uを補償する外乱変数補償器とを含む。状態変数xは、θをフィードバック位置、θdotをフィードバック速度として、以下の通り表され、超平面行列Sを[S2 S3]としてスライディングモード制御器中の切換関数σはS・xを含む。
【選択図】 図1
【解決手段】位置制御装置は、位置指令rと制御システムの状態変数xとを受け取り制御入力uをサーボモータへ提供するスライディングモード制御器と、フィードバック速度に基づいて制御入力uを補償する外乱変数補償器とを含む。状態変数xは、θをフィードバック位置、θdotをフィードバック速度として、以下の通り表され、超平面行列Sを[S2 S3]としてスライディングモード制御器中の切換関数σはS・xを含む。
【選択図】 図1
Description
本発明は、サーボモータ又はサーボモータによって駆動される移動体を位置決めする制御装置に関し、特に、スライディングモード制御器を有する位置制御装置に関する。
工作機械の刃のような移動体を位置決めする位置制御装置は、多くの場合、比例−積分−微分(「PID」)制御器を含んでおり、PID制御器は古典制御理論に基づいて設計される。移動体の位置、あるいは移動体を駆動するサーボモータの位置は、ロータリエンコーダやリニアエンコーダのような位置検出器を用いて検出され、検出された位置は位置制御装置へ送信される。指令位置と検出位置との差は偏差としてPID制御器へ入力され、PID制御器ゲインはサーボモータ応答を確かめながらサーボ系に応じて調整される。比例ゲインを増大させるとプロセスの安定性を改善することができるが、比例ゲインを過剰に増大させると振動が発生するおそれがある。比例ゲインを振動が起きないレベルまで減少させたら、積分ゲインを変えることによってシステムの安定性をさらに改善することができる。
非特許文献1に紹介されているような、スライディングモード制御理論として知られる他の従来の制御理論を使用して、設計が容易で制御性が良い制御器を設計することができる。スライディングモード制御器は、制御入力を決定するゲインを切換関数に従って変化させることによって制御システムの状態を超平面上にモデル化する。スライディングモード制御理論は、工作機械に取り付けられた移動体を位置決めする制御装置に組み込まれるようになった。特許文献1は、サーボモータによって駆動されるロボットや工作機械に対してスライディングモード制御理論を応用して位置・速度制御を行うことを開示している。
図6は、従来の位置制御装置の一例を示している。位置制御装置は、制御システム10へ制御入力uを供給するスライディングモード制御器50と、外乱に応答して制御入力uを補償する外乱変数補償器20と、状態変数xを観測する状態観測器30とを含む。制御システム10は、移動体(図示されていない)、サーボモータ(図示されていない)、モータトルク定数11、伝達関数12を含む。モータトルク定数11と伝達関数12に関して、Jは慣性モーメント、sはラプラス演算子、Ktはモータのトルク定数を示す。制御システム10の運動方程式は、数式1によって表される。
数式1において、θはサーボモータの角度位置、Iqはq軸電流、dは外乱値である。数式1に基づいて、状態変数x、制御入力u、被制御変数yの関数を表す状態方程式は、数式2を用いて表される。
上述のサーボ系では、定常偏差を特定し消去することが必須である。従って、指令位置rと制御システム10から出力されるフィードバック位置yとの偏差eの積分値vが切換関数σへ与えられる。この点に関して、スライディングモード制御をサーボ系に拡大するための状態方程式が、下記の数式3中に示され、切換関数σが数式4中に示される。
フィードバック位置yは、位置検出器から出力された測定位置θ、または適当な状態観測器から出力された推定位置である。指令位置rとフィードバック位置yとの間の差である偏差eは、減算器71から積分器72へ送られる。状態観測器30は、フィードバック信号yと制御入力uの両方を入力として受け取り、状態変数xをスライディングモード制御器50へ供給する。状態変数xと積分器72からの出力vはベクトル化器73へ送られ、ベクトル化器73はベクトルzを出力する。乗算器74を用いてベクトルzに超平面行列Sが掛けられる。
スライディングモード制御器50の設計及び制御は、数式5の制御則に従うものとする。
ここで、ulは制御システム10の状態が切換超平面の上を滑ってゆくようにさせる線形制御入力であり、unlは制御システム10の状態が切換超平面の方へ向かうようにさせる非線形制御入力である。線形制御入力ulは、数式6によって表され、非線形制御入力unlは数式7によって表される。
高速で移動する工作機械に関して、移動中の追従性を向上させるために、通常、速度及び加速度のフィードフォワード補償が行われる。このような特定の場合、切換関数σは、数式8によって表され、線形制御入力ulは数式9によって表される。
図6中にイラストされた位置制御装置では、指令位置rを微分する微分器46が指令速度rdotを発生し、指令速度rdotを微分する微分器47が指令加速度rddotを発生する。フィードフォーワード補償器61がゲインAffを用いて指令速度rdotを増幅し、フィードフォワード補償器62がゲインCffを用いて指令位置rを増幅する。乗算器74の出力S・zと、フィードフォワード補償器61とフィードフォワード補償器62の出力とが加算器75へ供給され、切換関数σが加算器75から平滑関数76へ送信される。平滑関数76からの出力がブロック77に入力され、ブロック77は数式7に基づいて非線形制御入力unlを加算器78へ送る。フィードフォワード補償器51がゲインAffを用いて指令加速度rddotを増幅し、フィードフォワード補償器52がゲインCffを用いて指令速度rdotを増幅する。フィードフォワード補償器51とフィードフォワード補償器52の出力はそれぞれブロック53とブロック54へ送信され、指令位置rとベクトルzはそれぞれブロック55とブロック56へ送信される。線形制御入力ulが、数式9に基づいて、ブロック53、ブロック54、ブロック55、ブロック56の出力として発生する。加算器78は、スライディングモード制御器50の出力である制御入力uすなわちq軸電流Iqを発生する。スライディングモード制御器50は、制御入力uを変化させることによって制御システム10の状態を切換超平面上に制御する。
特開平5−257537号公報
野波健蔵、田宏奇著「スライディングモード制御―非線形ロバスト制御の設計理論―」コロナ社1994年
移動中にサーボモータが指令入力に十分に追従するようスライディングモード制御器50中のゲインをサーボ系に応じて調整しなければならない。もし、積分値vのゲインに相当する、ブロック74中の要素S1を増大させると、ステッピング応答に望ましくないオーバシュートが起こるおそれがある。
本発明の目的は、先行技術の位置制御システムに見られる不都合、特に、移動中の追従性を損なうことなくオーバシュートを防止することに関わる不都合に取り組むことである。
本発明によれば、サーボモータとサーボモータによって駆動される移動体を含む制御システムの位置を指令値に追従させる位置制御装置は、数式10に従って指令位置rと制御システムの状態変数xとを受け取りサーボモータへ制御入力uを提供するスライディングモード制御器を含む。
数式10において、θはフィードバック位置、θdotはフィードバック速度である。位置制御装置は、また、フィードバック速度θdotに基づいて制御入力uを補償する外乱変数補償器を含み、超平面行列Sを[S2 S3]としてスライディングモード制御器中の切換関数σがS・xを含む。
好ましくは、指令速度rdot、指令加速度rddot、ゲインとしてのCff、Affが、スライディングモード制御器に入力される。切換関数σは数式11によって表される。
制御入力uは線形制御入力ulと非線形制御入力unlの和であり、線形制御入力ulは数式12によって表される。
第2の側面において、本発明は、サーボモータとサーボモータによって駆動される移動体を含む制御システムの位置を指令値に追従させる位置制御装置である。その位置制御装置は、積分要素を用いることなく指令位置rと制御システムの状態変数xとを受け取りサーボモータへ制御入力uを提供するスライディングモード制御器を含む。ここで、状態変数xは、θをフィードバック位置、θdotをフィードバック速度として数式10によって表される。位置制御装置は、さらに、フィードバック速度θdotに基づいて制御入力uを補償する外乱変数補償器を含む。
この簡単な要約は発明の本質を即座に理解できるように提供された。発明の好適な実施例の下記の詳細な説明を添付の図面と関連させて参照することによって、発明をより完全に理解できる。他の実施例を利用したり、本発明の範囲から逸脱することなく変更を加えることができることが理解される。
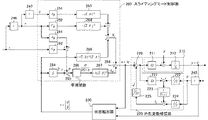
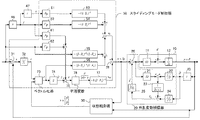
図1は、本発明による位置制御装置の一例をイラストしている。位置制御装置は、制御入力uを制御システムへ供給するスライディングモード制御器と、外乱に応答して制御入力uを補償する外乱変数補償器と、状態変数xを観測する状態観測器とを含む。
スライディングモード制御器260は、いかなる積分要素も含んでいない。スライディングモード制御器260の内部では、指令位置rとフィードバック位置yとの偏差の積分値は切換関数へ供給されていない。外乱変数補償器220は全ての偏差を外乱と見なして補償する。切換関数は以下の通り表される。
数式13中の切換関数と超平面行列は、数式4中のそれらと区別するためにσbarとSbarを用いて表されている。状態観測器230は、フィードバック位置yと制御入力uを入力として受け取り、状態変数xをスライディングモード制御器260へ供給する。乗算器284を用いて状態変数xに超平面行列Sbarが掛けられる。
スライディングモード制御器260も、数式5の制御則に従うものとする。線形及び非線形制御入力はそれぞれ数式14及び15によって表される。
数式14及び15の線形及び非線形制御入力は、数式6及び7中のそれらと区別するためにulbarとunlbarを用いて表されている。速度と加速度のフィードバック補償を用いて移動中の追従性を向上させるるため、数式13と14は、それぞれ数式16と17によって表される。
数値制御装置(図示されていない)からの指令位置rがブロック262へ供給される。指令速度rdotはフィードフォワード補償器252とフィードフォワード補償器261へ送られ、指令加速度rddotはフィードフォワード補償器251へ送られる。乗算器284の出力Sbar・xと、フィードフォワード補償器261とフィードフォワード補償器262の出力とが加算器285へ供給され、切換関数σbarが加算器285から平滑関数286へ送られる。平滑関数286の出力がブロック287に入力され、ブロック287は数式15に基づいて非線形制御入力unlbarを加算器288へ送る。フィードフォワード補償器251とフィードフォワード補償器252の出力が、それぞれブロック263とブロック264へ送信され、状態変数xはブロック268へ送られる。線形制御入力ulbarは、数式17に基づいて、ブロック263、ブロック264、ブロック268の出力から得られる。加算器288は、スライディングモード制御器260の出力として制御入力uすなわちq軸電流Iqを発生する。スライディングモード制御器260は制御入力uの切換によって制御システム210の状態を切換超平面の上に拘束する。
制御入力uすなわちq軸電流Iqと、フィードバック速度は、外乱変数補償器220へ供給され、外乱変数補償器220は外乱トルクに応答して制御入力uを補償する。q軸電流Iqは乗算器221でトルク定数Ktが掛けられる。フィードバック速度は測定速度θdotまたは適当な状態観測器から出力された推定速度である。測定位置θを微分する微分器245は測定速度θdotを出力し、この測定速度θdotは乗算器222と乗算器224の内部でJ/Tが掛けられる。ここで、Tはローパスフィルタ223の時定数である。乗算器221と乗算器222の出力の和は、sがラプラス演算子を表すローパスフィルタ223へ供給される。推定外乱トルクτLhatは、ローパスフィルタ223の出力から乗算器224の出力を減じることによって得られる。乗算器225は、推定外乱トルクτLhatに1/Ktを掛け、推定外乱トルクτLhatをq軸電流に変換させて推定外乱dhatを発生する。加算器226は制御入力uと推定外乱dhatの和を制御システム210へ供給する。
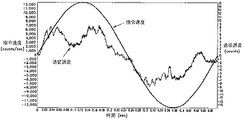
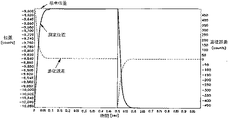
図2中に示されるように、図1の位置制御装置中のゲインは最大追従誤差が10カウントより小さくなるように調整され、図3中のグラフは、そのような状態で測定されたステップ応答を示している。
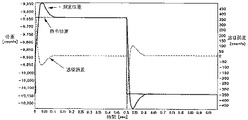
図4中に示されるように、図6の位置制御装置中のゲインも、また、最大追従誤差が10カウントより小さくなるように調整された。図5のグラフは、そのような状態で測定されたステップ応答を示している。図3中に示されるように、本発明の位置制御装置は、追従誤差が小さい状態でオーバシュートの発生を防止することができる。
本発明はある特定の詳細な実施例を用いて説明された。本発明は上述の実施例に限定されることなく、本発明の精神および範囲から逸脱することなく当業者によって種々の変更や変形を加えることができることが理解されよう。
10、制御システム
11、モータトルク定数
12、伝達関数
20、外乱変数補償器
23、ローパスフィルタ
26、75、78、加算器
30、状態観測器
45、46、47、微分器
50、スライディングモード制御器
51、52、61、62、フィードフォワード補償器
71、減算器
72、積分器
73、ベクトル化器
75、78、加算器
76、平滑関数
210、制御システム
211、モータトルク定数
212、伝達関数
220、外乱変数補償器
223、ローパスフィルタ
226、285、288、加算器
230、状態観測器
245、246、247、微分器
251、252、261、262、フィードフォワード補償器
260、スライディングモード制御器
285、288、加算器
286、平滑関数
11、モータトルク定数
12、伝達関数
20、外乱変数補償器
23、ローパスフィルタ
26、75、78、加算器
30、状態観測器
45、46、47、微分器
50、スライディングモード制御器
51、52、61、62、フィードフォワード補償器
71、減算器
72、積分器
73、ベクトル化器
75、78、加算器
76、平滑関数
210、制御システム
211、モータトルク定数
212、伝達関数
220、外乱変数補償器
223、ローパスフィルタ
226、285、288、加算器
230、状態観測器
245、246、247、微分器
251、252、261、262、フィードフォワード補償器
260、スライディングモード制御器
285、288、加算器
286、平滑関数
Claims (12)
- サーボモータとサーボモータによって駆動される移動体を含む制御システムの位置を指令値に追従させる位置制御装置において、
θをフィードバック位置、θdotをフィードバック速度として、状態変数xが数式1の通り表され、
超平面行列Sを[S2 S3]としてスライディングモード制御器中の切換関数σがS・xを含む位置制御装置。 - サーボモータへの制御入力uはq軸電流である請求項1に記載の位置制御装置。
- Jが慣性モーメントを表しKtがサーボモータのトルク定数をあらわすものとして、制御システムの状態方程式が数式2の通り表される請求項1に記載の位置制御装置。
- 制御システムの運動方程式が数式3の通り表される請求項3に記載の位置制御装置。
- 前記スライディングモード制御器には指令速度rdotと指令加速度rddotが入力され、CffとAffをゲインとして切換関数σは数式4の通り表され、
- 非線形制御入力unlは数式6の通り表される請求項5に記載の位置制御装置。
- サーボモータとサーボモータによって駆動される移動体を含む制御システムの位置を指令値に追従させる位置制御装置において、
θをフィードバック位置、θdotをフィードバック速度として、状態変数xが数式1の通り表され、
- サーボモータへの制御入力uはq軸電流である請求項7に記載の位置制御装置。
- Jが慣性モーメントを表しKtがサーボモータのトルク定数を表すものとして、制御システムの状態方程式が数式2の通り表される請求項7に記載の位置制御装置。
- 制御システムの運動方程式が数式3の通り表される請求項9に記載の位置制御装置。
- 前記スライディングモード制御器には指令速度rdotと指令加速度rddotが入力され、CffとAffをゲインとして切換関数σが数式7の通り表され、
- 非線形制御入力は数式6の通り表される請求項11に記載の位置制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/816,864 US7190140B2 (en) | 2004-04-05 | 2004-04-05 | Sliding mode controller position control device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005293564A true JP2005293564A (ja) | 2005-10-20 |
Family
ID=35055422
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005064832A Pending JP2005293564A (ja) | 2004-04-05 | 2005-03-09 | スライディングモード制御器を有する位置制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7190140B2 (ja) |
| JP (1) | JP2005293564A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100932622B1 (ko) * | 2007-08-21 | 2009-12-17 | 성균관대학교산학협력단 | 초정밀 위치 결정 시스템에 적용되는 슬라이딩 모드 제어기반의 최적 제어방법 |
| CN103336483A (zh) * | 2013-05-22 | 2013-10-02 | 沈阳工业大学 | 时变滑模变结构和交叉耦合控制磁悬浮系统的控制方法 |
| KR101434310B1 (ko) | 2013-05-22 | 2014-08-26 | 현대로템 주식회사 | 이동장비에 장착된 구동장치의 안정화성능 향상 기법 및 시스템과 그 이동장비 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8200347B2 (en) * | 2009-01-22 | 2012-06-12 | Mitsubishi Electric Research Laboratories, Inc. | Method and apparatus for hybrid resetting states proportional-integral-derivative and lag controllers |
| JP5530159B2 (ja) * | 2009-11-30 | 2014-06-25 | ローム株式会社 | モータ制御回路および制御方法ならびにそれらを用いた撮像機能付き電子機器 |
| JP5723582B2 (ja) * | 2010-11-30 | 2015-05-27 | インターナショナル・ビジネス・マシーンズ・コーポレーションInternational Business Machines Corporation | スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム |
| JPWO2014010020A1 (ja) * | 2012-07-09 | 2016-06-20 | 株式会社安川電機 | モータ制御装置及びモータシステム |
| CN112947310B (zh) * | 2021-01-28 | 2022-07-08 | 清华大学 | 一种基于预测模型的旋转伺服电机轨迹预补偿方法及装置 |
| CN116833993A (zh) * | 2022-03-23 | 2023-10-03 | 北京理工大学 | 仿生假人手臂精确跟踪控制系统及方法 |
| CN114967466B (zh) * | 2022-06-02 | 2025-02-07 | 安徽工业大学 | 一种基于干扰补偿和全状态约束的电液伺服系统预设性能输出反馈控制方法 |
| CN115903908B (zh) * | 2022-12-14 | 2023-07-11 | 南京航空航天大学 | 一种基于快速终端滑模的蜂群无人机容错协同控制方法 |
| CN116300683B (zh) * | 2023-03-20 | 2026-03-17 | 沈阳工业大学 | 提高直驱xy运动平台伺服系统轮廓精度的装置及方法 |
| CN119036436B (zh) * | 2024-06-26 | 2025-10-03 | 天津大学 | 基于数字孪生的万向型气动柔性机械臂双环位置控制方法 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02297603A (ja) | 1989-05-12 | 1990-12-10 | Fanuc Ltd | スライディングモードと外乱推定オブザーバを併用したサーボ制御方式 |
| JPH0325505A (ja) | 1989-06-22 | 1991-02-04 | Toyo Electric Mfg Co Ltd | 多機能形制御装置 |
| JPH03118618A (ja) * | 1989-09-30 | 1991-05-21 | Fanuc Ltd | 制振効果を持つスライディングモード制御による制御方式 |
| US4999553A (en) * | 1989-12-28 | 1991-03-12 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Method and apparatus for configuration control of redundant robots |
| US5019958A (en) * | 1990-02-12 | 1991-05-28 | Varga Ljubomir D | Generalized synthesis of control systems of zero-order/instantaneous response and infinite disturbance rejection ratio |
| JPH05134758A (ja) * | 1991-05-17 | 1993-06-01 | Fanuc Ltd | サーボモータの制御方式 |
| EP0543654B1 (en) * | 1991-11-22 | 1998-10-28 | Fujitsu Limited | Positioning control system |
| JPH05216504A (ja) * | 1992-02-06 | 1993-08-27 | Fanuc Ltd | バネ系を含む制御対象に対する適応的スライディングモード制御方式 |
| US5369345A (en) * | 1992-03-31 | 1994-11-29 | Seagate Technology, Inc. | Method and apparatus for adaptive control |
| JP2999330B2 (ja) | 1992-05-29 | 2000-01-17 | 株式会社神戸製鋼所 | スライディングモード制御系を用いた制御方法 |
| US5510939A (en) * | 1992-07-16 | 1996-04-23 | Micropolis Corporation | Disk drive with adaptive positioning |
| US5379210A (en) * | 1992-07-24 | 1995-01-03 | M&M Software Products, Inc. | Natural tracking controller |
| US5475291A (en) * | 1992-12-10 | 1995-12-12 | Matsushita Electric Industrial Co., Ltd. | Adjustment device for adjusting control parameters of a servo motor and an adjustment method therefor |
| JP3196390B2 (ja) * | 1992-12-25 | 2001-08-06 | 富士電機株式会社 | パラメータ同定器 |
| US5585976A (en) * | 1994-06-22 | 1996-12-17 | Seagate Technology, Inc. | Digital sector servo incorporating repeatable run out tracking |
| US5847895A (en) * | 1995-03-07 | 1998-12-08 | Cirrus Logic, Inc. | Chatter reduction in sliding mode control of a disk drive actuator |
| US5631999A (en) * | 1995-09-06 | 1997-05-20 | Seagate Technology Inc. | Adaptive compensation for hard disc drive spindle motor manufacturing tolerances |
| US5982721A (en) * | 1996-03-29 | 1999-11-09 | Cirrus Logic, Inc. | Optical disc drive comprising switching gains for forcing phase states to follow a sliding line trajectory in a servo system |
| JP3299109B2 (ja) * | 1996-04-05 | 2002-07-08 | 本田技研工業株式会社 | スライディングモード制御方法 |
| US6278899B1 (en) * | 1996-05-06 | 2001-08-21 | Pavilion Technologies, Inc. | Method for on-line optimization of a plant |
| US6381504B1 (en) * | 1996-05-06 | 2002-04-30 | Pavilion Technologies, Inc. | Method for optimizing a plant with multiple inputs |
| US6046878A (en) * | 1997-04-30 | 2000-04-04 | Seagate Technology, Inc. | Object positioning using discrete sliding mode control with variable parameters |
| KR19980083174A (ko) * | 1997-05-12 | 1998-12-05 | 윤종용 | 공진계의 진동억제 제어방법 및 제어장치 |
| JP3297643B2 (ja) * | 1997-10-14 | 2002-07-02 | 東芝機械株式会社 | 送り駆動系のサーボ制御方法およびサーボ制御装置 |
| KR100475121B1 (ko) * | 2002-12-16 | 2005-03-10 | 삼성전자주식회사 | 디스크 드라이브의 안착 서보 제어 방법 및 장치 그리고이에 적합한 vcm 액튜에이터의 가속도 상수 추정 방법및 이에 적합한 장치들 |
-
2004
- 2004-04-05 US US10/816,864 patent/US7190140B2/en not_active Expired - Lifetime
-
2005
- 2005-03-09 JP JP2005064832A patent/JP2005293564A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100932622B1 (ko) * | 2007-08-21 | 2009-12-17 | 성균관대학교산학협력단 | 초정밀 위치 결정 시스템에 적용되는 슬라이딩 모드 제어기반의 최적 제어방법 |
| CN103336483A (zh) * | 2013-05-22 | 2013-10-02 | 沈阳工业大学 | 时变滑模变结构和交叉耦合控制磁悬浮系统的控制方法 |
| KR101434310B1 (ko) | 2013-05-22 | 2014-08-26 | 현대로템 주식회사 | 이동장비에 장착된 구동장치의 안정화성능 향상 기법 및 시스템과 그 이동장비 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7190140B2 (en) | 2007-03-13 |
| US20050222695A1 (en) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4665096B2 (ja) | スライディングモード制御器を有する工作機械に用いられるモーションコントローラ | |
| KR940003005B1 (ko) | 동기형 교류 서보모터의 속도제어방법 | |
| JP4760912B2 (ja) | サーボ制御装置 | |
| EP2105810A2 (en) | Apparatus and method for controlling a system | |
| JP2005293564A (ja) | スライディングモード制御器を有する位置制御装置 | |
| JP2005301508A (ja) | 制御装置 | |
| WO2014136686A1 (ja) | 工作機械の送り軸制御方法および送り軸制御装置 | |
| JP2009245420A (ja) | システムを制御するための装置および方法 | |
| JP4867105B2 (ja) | 数値制御装置 | |
| EP1560325B1 (en) | Position controller of motor | |
| JPWO2014167808A1 (ja) | モータ駆動装置 | |
| CN104730973A (zh) | 电机控制装置 | |
| JP2010049599A (ja) | 工作機械 | |
| JP4226420B2 (ja) | 位置制御装置 | |
| US20070007927A1 (en) | Position controller and controlling method therefor | |
| JP4925056B2 (ja) | モータ位置制御装置 | |
| Jaafar et al. | Sliding mode control with dirty derivatives filter for rigid robot manipulators | |
| JP5660482B2 (ja) | 工作機械の送り駆動系の制御方法及び制御装置 | |
| JP2014117787A (ja) | 制御装置 | |
| Qin et al. | Nonlinear discrete observer for flexibility compensation of industrial robots | |
| Ren et al. | Joint torque control of a collaborative robot based on active disturbance rejection with the consideration of actuator delay | |
| JP2014176291A (ja) | 工作機械の送り軸制御方法および送り軸制御装置 | |
| JP5671698B2 (ja) | モータ位置制御方法 | |
| JP2004102556A (ja) | 位置決め制御装置 | |
| JP2007306779A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070920 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090707 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091110 |