JP2005293376A - 車載カメラ - Google Patents
車載カメラ Download PDFInfo
- Publication number
- JP2005293376A JP2005293376A JP2004109333A JP2004109333A JP2005293376A JP 2005293376 A JP2005293376 A JP 2005293376A JP 2004109333 A JP2004109333 A JP 2004109333A JP 2004109333 A JP2004109333 A JP 2004109333A JP 2005293376 A JP2005293376 A JP 2005293376A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering angle
- angle
- vehicle speed
- view
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims description 4
- 230000007423 decrease Effects 0.000 claims 1
- 238000000034 method Methods 0.000 description 20
- 238000004891 communication Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
Images



Landscapes
- Focusing (AREA)
- Lens Barrels (AREA)
- Automatic Focus Adjustment (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】 カーブ路でも遠方の車両や障害物を映せるようにできる車載カメラを提供すること。
【解決手段】 車両に搭載して前方または後方を監視する車載カメラにおいて、車両の速度を検知する車両速度計3と、車両のステアリング舵角を検知するステアリング舵角センサー14と、車両の速度とステアリング舵角に従ってズームレンズ駆動装置5を制御するマイクロコンピュータ42とを具備し、車両の速度とステアリング舵角に応じて焦点距離を変えた。
【選択図】 図1
【解決手段】 車両に搭載して前方または後方を監視する車載カメラにおいて、車両の速度を検知する車両速度計3と、車両のステアリング舵角を検知するステアリング舵角センサー14と、車両の速度とステアリング舵角に従ってズームレンズ駆動装置5を制御するマイクロコンピュータ42とを具備し、車両の速度とステアリング舵角に応じて焦点距離を変えた。
【選択図】 図1
Description
本発明は、車両の外部を撮影して運転者に見せて運転支援等を行うための車載カメラの技術分野に属する。
従来の車載カメラは、車両の速度計の信号に従って、カメラのズームレンズを駆動して、車両の速度に応じてズームインあるいはズームアウトを行う。(例えば、特許文献1参照。)。
特開平11−312300号公報(第2−6頁、全図)
しかしながら、従来にあっては、車載カメラを車両の車速に応じてズームを行うものでは、カーブ路において道路脇を映すことになり、見づらい画像になってしまう。
本発明は、上記問題点に着目してなされたもので、その目的とするところは、
カーブ路でも遠方の車両や障害物を映せるようにできる車載カメラを提供することにある。
カーブ路でも遠方の車両や障害物を映せるようにできる車載カメラを提供することにある。
上記目的を達成するため、本発明では、車両に搭載して前方または後方を監視する車載カメラにおいて、車両の速度を検知する速度検知手段と、車両のステアリング舵角を検知する舵角検知手段と、車両の速度とステアリング舵角に従ってズームレンズを制御する画角制御手段とを具備し、車両の速度とステアリング舵角に応じて焦点距離を変えることを特徴とする。
よって、車載カメラを車両の車速に応じてズームを行うが、ステアリングの舵角に応じてズームを戻すようにすることにより、カーブ路でも遠方の車両や障害物を映すことができる。
以下、本発明の車載カメラを実現する実施の形態を、請求項1,2に係る発明に対応する実施例1に基づいて説明する。
まず、構成を説明する。
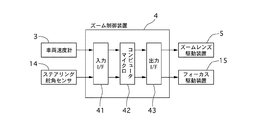
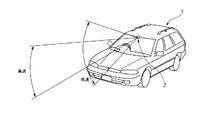
図1は実施例1の車載カメラの制御部分のブロック図である。図2〜図4は実施例1の車載カメラの制御処理の流れを示すフローチャート図である。図5は実施例1の車載カメラの車速と画角の関係を示す説明図である。図6は実施例1の車載カメラを車両に取り付けた状態を示す斜視図である。図7は実施例1の車載カメラの制御で使用するステアリング舵角の説明図である。
車両速度計3(速度検知手段に相当する)は、車両の速度に比例したレートのパルスを発生する。
ステアリング舵角センサー14(舵角検知手段に相当する)は、ハンドルに取り付けた舵角センサで、CAN等の通信によりズーム制御装置に入力される。
ズーム制御装置4は、入力I/F41とマイクロコンピュータ42及び出力I/F43を主な構成としている。
図1は実施例1の車載カメラの制御部分のブロック図である。図2〜図4は実施例1の車載カメラの制御処理の流れを示すフローチャート図である。図5は実施例1の車載カメラの車速と画角の関係を示す説明図である。図6は実施例1の車載カメラを車両に取り付けた状態を示す斜視図である。図7は実施例1の車載カメラの制御で使用するステアリング舵角の説明図である。
車両速度計3(速度検知手段に相当する)は、車両の速度に比例したレートのパルスを発生する。
ステアリング舵角センサー14(舵角検知手段に相当する)は、ハンドルに取り付けた舵角センサで、CAN等の通信によりズーム制御装置に入力される。
ズーム制御装置4は、入力I/F41とマイクロコンピュータ42及び出力I/F43を主な構成としている。
入力I/F41は、車両速度計3のパルス信号とステアリング舵角センサー14の通信信号をマイクロコンピュータ42の入力に合わす為の変換を行う。
マイクロコンピュータ42は、車両速度計3のパルス信号より車両速度を計算し、ステアリング舵角センサー14の通信信号を受信して舵角値を取り込み、この2つのパラメータより演算してズームレンズの画角を求め、ズームレンズ駆動装置5とフォーカス駆動装置15を駆動する信号を作成する。
出力I/F43は、マイクロコンピュータ42から出力したズームレンズ駆動制御信号とフォーカス駆動制御信号をズームレンズ駆動装置5とフォーカス駆動装置15の入力に合わす変換を行う。
マイクロコンピュータ42は、車両速度計3のパルス信号より車両速度を計算し、ステアリング舵角センサー14の通信信号を受信して舵角値を取り込み、この2つのパラメータより演算してズームレンズの画角を求め、ズームレンズ駆動装置5とフォーカス駆動装置15を駆動する信号を作成する。
出力I/F43は、マイクロコンピュータ42から出力したズームレンズ駆動制御信号とフォーカス駆動制御信号をズームレンズ駆動装置5とフォーカス駆動装置15の入力に合わす変換を行う。
ズームレンズ駆動装置5(マイクロコンピュータ42とともに画角制御手段に相当する)は、ズームレンズ駆動制御信号によりバリエータレンズを移動させる駆動系である。
フォーカス駆動装置15は、フォーカス駆動制御信号によりフォーカシングレンズを移動させる駆動系である。
フォーカス駆動装置15は、フォーカス駆動制御信号によりフォーカシングレンズを移動させる駆動系である。
次に、作用を説明する。
[車両速度及びステアリング舵角による画角制御処理]
図2に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。
電源ON後リセット解除するとステップS100に飛び、リセットルーチンを実行する。
[車両速度及びステアリング舵角による画角制御処理]
図2に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。
電源ON後リセット解除するとステップS100に飛び、リセットルーチンを実行する。
ステップS101では、ポート、タイマー、割込マスク等のレジスタの初期化を行う。立下りエッジによるインプットキャプチャー割込と1msタイマー割込及びステアリング舵角センサー14との通信を設定する。
ステップS102では、割込禁止から割込許可し、割込を受け入れる様にする。
以下、ステップS103からステップS108迄は、メインルーチンで繰り返し実行する。
以下、ステップS103からステップS108迄は、メインルーチンで繰り返し実行する。
ステップS103では、10ms経過フラグがセットされているか判断し、セットされているならばステップS104に進み、セットされていないならばステップS103をループする。
ステップS104では、10ms経過フラグをクリアする。
ステップS105では、車両速度計3の出力パルスの立下りエッジによるインプットキャプチャー割込により取り込んだインプットキャプチャー値T1と割込回数カウンタ値N1を元に車両速度を求める。この車両速度は、車両速度V=A(N1-N2)/(T1-T2)の式で計算する。ここで、Aはパルス周期より車両速度に変換する係数であり、T2は前回車両速度計算した時のインプットキャプチャー値T1であり、N2は前回車両速度計算した時の割込回数カウンタ値N1である。
ステップS106では、ズームレンズ駆動制御信号が停止しているかを判断し、停止しているならばステップS107に進み、停止していないならばステップS103に進む。
ステップS107では、フォーカス駆動信号が停止しているかを判断し、停止しているならばステップS108に進み、停止していないならばステップS103に進む。
ステップS108では、車両速度計3の出力パルスより求めた車両速度とステアリング舵角センサー14より受信した舵角値のこの2つのパラメータより画角を求める。この画角よりズームレンズ駆動制御信号とフォーカス駆動制御信号の指令値を計算し、ステップS103へ進む。
[車両速度に関する割込み処理]
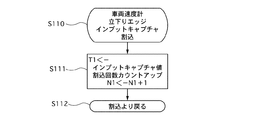
図3に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理に対する車両速度に関する割込み処理の流れを示すフローチャートで、以下、各ステップについて説明する。
図3に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理に対する車両速度に関する割込み処理の流れを示すフローチャートで、以下、各ステップについて説明する。
車両速度計3の出力パルスの立下りエッジがインプットキャプチャー入力に入ると、インプットキャプチャー割込が発生し、メインルーチン(ステップS100〜S108)のプログラムを一時中断してステップS110に飛ぶ。
ステップS111では、インプットキャプチャー値をRAMであるT1に記憶し、RAMである割込回数カウンタ値N1をカウントアップする。
ステップS112では、割込みより戻り、一時中断したメインルーチンのプログラムの実行を再開する。
[ステアリング舵角に関する割込み処理]
図4に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理に対するステアリング舵角に関する割込み処理の流れを示すフローチャートで、以下、各ステップについて説明する。
図4に示すのは、実施例1の車載カメラ2のマイクロコンピュータ42で実行される画角制御処理に対するステアリング舵角に関する割込み処理の流れを示すフローチャートで、以下、各ステップについて説明する。
1msタイマーが1ms経過時、タイマー割込みが発生しステップS120に飛ぶ。
ステップS121では、通信で送られてくるステアリング舵角センサー14の舵角値を受信したかチェックする。
ステップS122では、ステアリング舵角センサー14からの舵角値を受信したかどうかを判断し、受信したならばステップS123に進み、受信しないならばステップS124に進む。
ステップS123では、受信した舵角値をRAMに記憶する。
ステップS124では、ズームレンズ駆動制御信号の指令値と現在の移動位置を比較してずれている時、指令値に達するまでズームレンズ駆動制御信号を動作させる。
ステップS125では、フォーカス駆動制御信号の指令値と現在の移動位置を比較してずれている時、指令値に達するまでフォーカス駆動制御信号を動作させる。
ステップS126では、10msタイマーをカウントアップする。
ステップS127では、10ms経過したか判断し、経過したならばステップS128に進み、経過しないならばステップS129に進む。
ステップS128では、10msタイマーをクリアし、10ms経過フラグをセットする。
ステップS129では、割込より戻り、一時中断したメインルーチンのプログラムの実行を再開する。
[画角制御]
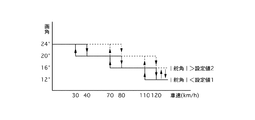
実施例1の画角制御処理について、図5を参照して説明する。
図5に示すように、ステアリング舵角センサー14の舵角値及び車両速度共にヒステリシスを設け、ハンチングを防止する。
ステアリング舵角センサー14の舵角値が設定値1未満の時で車両速度が30km/h未満の時、画角は、最大値の24度にする。
車両速度が40km/h以上、70km/h未満の時、画角は、20度にする。
車両速度が80km/h以上、110km/h未満の時、画角は、16度にする。
車両速度が120km/h以上の時、画角は最小値の12度にする。
ステアリング舵角センサー14の舵角値が設定値2を超えた時、車両速度が70km/h未満の時、画角は最大値の24度にする。
実施例1の画角制御処理について、図5を参照して説明する。
図5に示すように、ステアリング舵角センサー14の舵角値及び車両速度共にヒステリシスを設け、ハンチングを防止する。
ステアリング舵角センサー14の舵角値が設定値1未満の時で車両速度が30km/h未満の時、画角は、最大値の24度にする。
車両速度が40km/h以上、70km/h未満の時、画角は、20度にする。
車両速度が80km/h以上、110km/h未満の時、画角は、16度にする。
車両速度が120km/h以上の時、画角は最小値の12度にする。
ステアリング舵角センサー14の舵角値が設定値2を超えた時、車両速度が70km/h未満の時、画角は最大値の24度にする。
車両速度が80km/h以上、110km/h未満の時、画角は20度にする。
車両速度が120km/h以上の時、画角は最小値の16度にする。
ステアリング舵角センサー14の舵角値が設定値1以上、設定値2以下の時、前回の舵角値をもとに車両速度により画角を決定する。
車両速度が30km/h以上、40km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値(設定値に対する比較)による画角にする。
車両速度が70km/h以上、80km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値(設定値に対する比較)による画角にする。
車両速度が110km/h以上、120km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値による画角にする。
車両速度が120km/h以上の時、画角は最小値の16度にする。
ステアリング舵角センサー14の舵角値が設定値1以上、設定値2以下の時、前回の舵角値をもとに車両速度により画角を決定する。
車両速度が30km/h以上、40km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値(設定値に対する比較)による画角にする。
車両速度が70km/h以上、80km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値(設定値に対する比較)による画角にする。
車両速度が110km/h以上、120km/h未満の時、前回の車両速度のままとし、ステアリング舵角センサー14の舵角値による画角にする。
(a)ステアリング舵角が小さい場合
ステアリング舵角が小さい場合には、そのことがステアリング舵角センサー14で検知され、マイクロコンピュータ42のステップS108の処理により、図15に示す車両速度に応じた画角に設定されて、車載カメラ2はマイクロコンピュータ42によるズームレンズ駆動装置5の制御により図5に示すよう制御される。また、ズーム制御に合わせてフォーカス駆動装置15が制御される。車両速度に応じた画角に制御されることにより、速度が速くなるにつれて遠くを見やすくなり効果的な運転者の支援となる。
ステアリング舵角が小さい場合には、そのことがステアリング舵角センサー14で検知され、マイクロコンピュータ42のステップS108の処理により、図15に示す車両速度に応じた画角に設定されて、車載カメラ2はマイクロコンピュータ42によるズームレンズ駆動装置5の制御により図5に示すよう制御される。また、ズーム制御に合わせてフォーカス駆動装置15が制御される。車両速度に応じた画角に制御されることにより、速度が速くなるにつれて遠くを見やすくなり効果的な運転者の支援となる。
(b)ステアリング舵角が大きい場合
ステアリング舵角が大きい場合には、図5に示すように、車両速度に応じた画角に対して、画角を大きくする。これは、つまり車両速度に応じたズームが、ステアリング舵角に応じてズームを戻すことになり、このズームの戻りによりカーブ路でも遠方の車両や障害物を映すことができる。
また、車速及びステアリング舵角に応じる画角は、ステップ的に変更動作を行うため、変更動作自体を運転者が見る確率は極めて低く、画像は見やすくなる。
ステアリング舵角が大きい場合には、図5に示すように、車両速度に応じた画角に対して、画角を大きくする。これは、つまり車両速度に応じたズームが、ステアリング舵角に応じてズームを戻すことになり、このズームの戻りによりカーブ路でも遠方の車両や障害物を映すことができる。
また、車速及びステアリング舵角に応じる画角は、ステップ的に変更動作を行うため、変更動作自体を運転者が見る確率は極めて低く、画像は見やすくなる。
次に、効果を説明する。
実施例1の車載カメラにあっては、下記に列挙する効果を得ることができる。
(1)車両に搭載して前方または後方を監視する車載カメラ2において、車両の速度を検知する車両速度計3と、車両のステアリング舵角を検知するステアリング舵角センサー14と、車両の速度とステアリング舵角に従ってズームレンズ駆動装置5を制御するマイクロコンピュータ42とを具備し、車両の速度とステアリング舵角に応じて焦点距離を変えるため、車載カメラ2を車両の車速に応じてズームを行うが、ステアリングの舵角に応じてズームを戻すようにすることにより、カーブ路でも遠方の車両や障害物を映すことができる。
実施例1の車載カメラにあっては、下記に列挙する効果を得ることができる。
(1)車両に搭載して前方または後方を監視する車載カメラ2において、車両の速度を検知する車両速度計3と、車両のステアリング舵角を検知するステアリング舵角センサー14と、車両の速度とステアリング舵角に従ってズームレンズ駆動装置5を制御するマイクロコンピュータ42とを具備し、車両の速度とステアリング舵角に応じて焦点距離を変えるため、車載カメラ2を車両の車速に応じてズームを行うが、ステアリングの舵角に応じてズームを戻すようにすることにより、カーブ路でも遠方の車両や障害物を映すことができる。
(2)画角の制御を行うマイクロコンピュータ42は、車両の速度が速くなるに従って、画角を小さくし、ステアリング舵角が大きくなるに従って、画角を大きくするため、速度に対して見やすくしながら、さらに、カーブ路であっても見やすくし、より使いやすい運転支援を行うことができる。
以上、本発明の車載カメラを実施例1に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
例えば、実施例1では、ステアリング舵角センサー14の舵角値を通信で受信しているが、回転エンコーダを入力してもよい。
車両速度の計算について、一定時間に入力される車両速度計のパルス数をカウントして求めてもよい。
車両速度の判断値及び画角値について具体的な数値で説明しているが任意の数値でよい。
車両速度の計算について、一定時間に入力される車両速度計のパルス数をカウントして求めてもよい。
車両速度の判断値及び画角値について具体的な数値で説明しているが任意の数値でよい。
1 車両
2 車載カメラ
3 車両速度計
4 ズーム制御装置
41 入力I/F
42 マイクロコンピュータ
43 出力I/F
5 ズームレンズ駆動装置
14 ステアリング舵角センサー
15 フォーカス駆動装置
2 車載カメラ
3 車両速度計
4 ズーム制御装置
41 入力I/F
42 マイクロコンピュータ
43 出力I/F
5 ズームレンズ駆動装置
14 ステアリング舵角センサー
15 フォーカス駆動装置
Claims (2)
- 車両に搭載して前方または後方を監視する車載カメラにおいて、
車両の速度を検知する速度検知手段と、
車両のステアリング舵角を検知する舵角検知手段と、
車両の速度とステアリング舵角に従ってズームレンズを制御する画角制御手段と、
を具備し、
車両の速度とステアリング舵角に応じて焦点距離を変えることを特徴とする車載カメラ。 - 請求項1に記載の車載カメラにおいて、
画角制御手段は、
車両の速度が速くなるに従って、画角を小さくし、
ステアリング舵角が大きくなるに従って、画角を大きくする、
ことを特徴とする車載カメラ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109333A JP2005293376A (ja) | 2004-04-01 | 2004-04-01 | 車載カメラ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109333A JP2005293376A (ja) | 2004-04-01 | 2004-04-01 | 車載カメラ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005293376A true JP2005293376A (ja) | 2005-10-20 |
Family
ID=35326214
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004109333A Pending JP2005293376A (ja) | 2004-04-01 | 2004-04-01 | 車載カメラ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005293376A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008155786A (ja) * | 2006-12-25 | 2008-07-10 | Setsuo Kuroki | フロントフェンダーカメラ機構付き視認カメラ装着車 |
| JP2012019452A (ja) * | 2010-07-09 | 2012-01-26 | Mitsubishi Electric Corp | 画像処理装置及び画像処理方法 |
| CN102529812A (zh) * | 2012-01-13 | 2012-07-04 | 深圳市保千里电子有限公司 | 一种汽车夜视摄录仪系统及其实现方法 |
| KR101252534B1 (ko) * | 2011-08-26 | 2013-04-09 | 팽정희 | 다채널 영상/음향정보의 선택적 저장과 전송이 가능한 차량의 주행기록시스템 |
| US20130321629A1 (en) * | 2012-05-31 | 2013-12-05 | GM Global Technology Operations LLC | Dynamic guideline overlay with image cropping |
| US8694195B2 (en) * | 2007-12-04 | 2014-04-08 | Volkswagen Ag | Motor vehicle having a wheel-view camera and method for controlling a wheel-view camera system |
| JP2014175913A (ja) * | 2013-03-11 | 2014-09-22 | Nec Engineering Ltd | 撮像装置及び撮像装置の制御方法、制御プログラム |
| US9123251B2 (en) | 2013-08-20 | 2015-09-01 | Ford Global Technologies, Llc. | Image system for automotive safety applications |
| KR101561535B1 (ko) * | 2013-12-24 | 2015-10-20 | 전자부품연구원 | 운전자 시야 추적형 블랙 박스 및 그 제어 방법 |
| EP3229458A1 (en) * | 2016-04-07 | 2017-10-11 | LG Electronics Inc. | Driver assistance apparatus |
-
2004
- 2004-04-01 JP JP2004109333A patent/JP2005293376A/ja active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008155786A (ja) * | 2006-12-25 | 2008-07-10 | Setsuo Kuroki | フロントフェンダーカメラ機構付き視認カメラ装着車 |
| US8694195B2 (en) * | 2007-12-04 | 2014-04-08 | Volkswagen Ag | Motor vehicle having a wheel-view camera and method for controlling a wheel-view camera system |
| JP2012019452A (ja) * | 2010-07-09 | 2012-01-26 | Mitsubishi Electric Corp | 画像処理装置及び画像処理方法 |
| KR101252534B1 (ko) * | 2011-08-26 | 2013-04-09 | 팽정희 | 다채널 영상/음향정보의 선택적 저장과 전송이 가능한 차량의 주행기록시스템 |
| CN102529812A (zh) * | 2012-01-13 | 2012-07-04 | 深圳市保千里电子有限公司 | 一种汽车夜视摄录仪系统及其实现方法 |
| US9738223B2 (en) * | 2012-05-31 | 2017-08-22 | GM Global Technology Operations LLC | Dynamic guideline overlay with image cropping |
| US20130321629A1 (en) * | 2012-05-31 | 2013-12-05 | GM Global Technology Operations LLC | Dynamic guideline overlay with image cropping |
| JP2014175913A (ja) * | 2013-03-11 | 2014-09-22 | Nec Engineering Ltd | 撮像装置及び撮像装置の制御方法、制御プログラム |
| US9123251B2 (en) | 2013-08-20 | 2015-09-01 | Ford Global Technologies, Llc. | Image system for automotive safety applications |
| DE102014216285B4 (de) | 2013-08-20 | 2022-10-20 | Ford Global Technologies, Llc | Bildsystem für Kraftfahrzeugsicherheitsanwendungen |
| KR101561535B1 (ko) * | 2013-12-24 | 2015-10-20 | 전자부품연구원 | 운전자 시야 추적형 블랙 박스 및 그 제어 방법 |
| EP3229458A1 (en) * | 2016-04-07 | 2017-10-11 | LG Electronics Inc. | Driver assistance apparatus |
| US20170293198A1 (en) * | 2016-04-07 | 2017-10-12 | Lg Electronics Inc. | Driver assistance apparatus and vehicle |
| CN107272300A (zh) * | 2016-04-07 | 2017-10-20 | Lg电子株式会社 | 车辆驾驶辅助装置 |
| US10768505B2 (en) | 2016-04-07 | 2020-09-08 | Lg Electronics Inc. | Driver assistance apparatus and vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109398346B (zh) | 车辆控制系统及车辆控制方法 | |
| JP4021344B2 (ja) | 車両用運転支援装置 | |
| EP3330942B1 (en) | Method for controlling travel control device, and travel control device | |
| JP3838166B2 (ja) | 車両用運転操作補助装置 | |
| US7663475B2 (en) | Vehicle surrounding monitoring system | |
| US12110015B2 (en) | Vehicular driving assistance system with lateral motion control | |
| JP6394931B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| CN110386141A (zh) | 车辆的控制装置 | |
| JP2005173663A (ja) | 車両の走行制御装置 | |
| JP2005293376A (ja) | 車載カメラ | |
| JP2008168784A (ja) | 車両の走行制御装置 | |
| JP7034158B2 (ja) | 車両システム | |
| JP2009040319A (ja) | 運転支援装置 | |
| WO2016048368A1 (en) | Methods and system of assisting a driver of a vehicle | |
| JP2023119117A (ja) | 車両用警報装置 | |
| JP2003285688A (ja) | 車両用モニタ装置の視野調整装置及び方法 | |
| CN110884430A (zh) | 车辆控制装置和车辆控制方法 | |
| JP6607180B2 (ja) | 自動運転装置 | |
| JP2020523603A (ja) | 自動化された車両のためのセンサ装置 | |
| JP5458051B2 (ja) | 車両用運転支援装置 | |
| JP4864553B2 (ja) | 車両の走行安全装置 | |
| JP7599964B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP2019194886A (ja) | 車両制御システムおよび車両制御方法 | |
| WO2016048369A1 (en) | Method and system of assisting a driver of a vehicle | |
| CN113954861A (zh) | 车辆的控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051115 |