JP2005292632A - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP2005292632A JP2005292632A JP2004110044A JP2004110044A JP2005292632A JP 2005292632 A JP2005292632 A JP 2005292632A JP 2004110044 A JP2004110044 A JP 2004110044A JP 2004110044 A JP2004110044 A JP 2004110044A JP 2005292632 A JP2005292632 A JP 2005292632A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- image forming
- flywheel
- forming apparatus
- rotation angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Electrophotography Configuration And Component (AREA)
- Discharging, Photosensitive Material Shape In Electrophotography (AREA)
Abstract
【課題】 色ズレやバンディングが発生し難い画像形成装置を提供する。
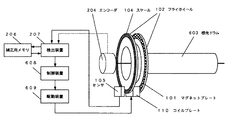
【解決手段】 大径フライホイール102の外周部分にはスケール104が形成されており、感光ドラム603の回転角を光学的に検出する。制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にて、この操作量に相当する電流を直動モータのコイル110に流すための印加電圧を発生する。直動モータでは印加電圧の変化により、大径フライホイール102の回転を制御して、剛接合された感光ドラム102の回転を一定に保つ。
【選択図】 図1
【解決手段】 大径フライホイール102の外周部分にはスケール104が形成されており、感光ドラム603の回転角を光学的に検出する。制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にて、この操作量に相当する電流を直動モータのコイル110に流すための印加電圧を発生する。直動モータでは印加電圧の変化により、大径フライホイール102の回転を制御して、剛接合された感光ドラム102の回転を一定に保つ。
【選択図】 図1
Description
本発明は、複写機、ファクシミリ、プリンタなどの電子写真技術を用いた画像形成装置に関し、特に画像形成装置における感光ドラム等の低速回転域の慣性体回転制御技術に関する。
画像形成装置の高画質化に伴い、印刷解像度を上げようとすると、従来よりも色ズレやバンディングが目立つようになってきている。色ズレとは、カラー印刷のときに、紙面上にて各色の印刷位置がずれる現象のことであり、その原因の一つに感光ドラムの機械的偏心が考えられるが、この機械的対策としては、高度な加工技術を用いて高精度化する方法が知られている。またバンディングとは、印刷された紙面上に見られる副走査方向の濃淡模様のことであり、その原因の一つに視覚感度の高い周波数帯域での感光ドラムの回転ムラが考えられる。この機械的対策としては、重いフライホイールを感光ドラム軸に取り付けて慣性を大きくすることで副走査方向の濃淡模様を除去する方法が知られている。
なお、色ズレに関しては、複数の感光体を直列配置したタンデム式カラー画像形成装置の高画質化に伴い、各感光ドラム間の色ズレ精度要求が益々厳しくなってきており、その色ズレ防止策の1手段としては高精度な位置決め制御が必要と考えられている。
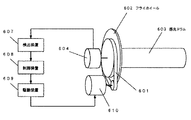
図8は感光ドラム駆動制御機構の従来例を示す図である。同図では、感光ドラムとフライホイールとが剛接合されており、フライホイールと駆動モータとはベルト減速機構を経由して接続されている。
駆動モータ610の回転力により、ベルト減速機構601を経由してフライホイール602が回転し、これに剛的に接合された感光ドラム603が回転する。そしてフライホイール602と同軸上にあるエンコーダ604も同じ回転数で回転する。これにより、感光ドラム603の回転角に応じた数だけパルスがエンコーダ604から出力され、検出装置607では、このパルス数を計数することによりドラム回転角を検出することができる。そして、制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にてこの操作量に相当する電流を駆動モータ610に流すための印加電圧を発生する。駆動モータ610では印加電圧の変化により、感光ドラム軸の回転を一定に保っている。
なお、色ズレに関しては、複数の感光体を直列配置したタンデム式カラー画像形成装置の高画質化に伴い、各感光ドラム間の色ズレ精度要求が益々厳しくなってきており、その色ズレ防止策の1手段としては高精度な位置決め制御が必要と考えられている。
図8は感光ドラム駆動制御機構の従来例を示す図である。同図では、感光ドラムとフライホイールとが剛接合されており、フライホイールと駆動モータとはベルト減速機構を経由して接続されている。
駆動モータ610の回転力により、ベルト減速機構601を経由してフライホイール602が回転し、これに剛的に接合された感光ドラム603が回転する。そしてフライホイール602と同軸上にあるエンコーダ604も同じ回転数で回転する。これにより、感光ドラム603の回転角に応じた数だけパルスがエンコーダ604から出力され、検出装置607では、このパルス数を計数することによりドラム回転角を検出することができる。そして、制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にてこの操作量に相当する電流を駆動モータ610に流すための印加電圧を発生する。駆動モータ610では印加電圧の変化により、感光ドラム軸の回転を一定に保っている。
図9は感光ドラム駆動制御機構の他の従来例を示す図である。同図では、感光ドラムとフライホイールとが剛接合されており、フライホイールと駆動モータとを減速機構なしに直接回転駆動している。
駆動モータ610の回転力により、直接フライホイール602が回転し、これに剛的に接合された感光ドラム603が回転する。そしてフライホイール602と同軸上にあるエンコーダ604も同じ回転数で回転する。これにより、感光ドラム603の回転角に応じた数だけパルスがエンコーダ604から出力され、検出装置607では、このパルス数を計数することによりドラム回転角を検出することができる。そして、制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にて、この操作量に相当する電流を駆動モータ610に流すための印加電圧を発生する。駆動モータ610では印加電圧の変化により、感光ドラム軸の回転を一定に保っている。
さらに、他の従来例として、感光ドラムの駆動モータとは別に、感光ドラムの回転角変位、速度、加速度に応じて回転時の負荷を調整する感光ドラムの回転軸と平行な駆動軸を有する補助駆動モータを備えた回転制御方法もある(例えば特許文献1)。
特開2000−330420公報
駆動モータ610の回転力により、直接フライホイール602が回転し、これに剛的に接合された感光ドラム603が回転する。そしてフライホイール602と同軸上にあるエンコーダ604も同じ回転数で回転する。これにより、感光ドラム603の回転角に応じた数だけパルスがエンコーダ604から出力され、検出装置607では、このパルス数を計数することによりドラム回転角を検出することができる。そして、制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にて、この操作量に相当する電流を駆動モータ610に流すための印加電圧を発生する。駆動モータ610では印加電圧の変化により、感光ドラム軸の回転を一定に保っている。
さらに、他の従来例として、感光ドラムの駆動モータとは別に、感光ドラムの回転角変位、速度、加速度に応じて回転時の負荷を調整する感光ドラムの回転軸と平行な駆動軸を有する補助駆動モータを備えた回転制御方法もある(例えば特許文献1)。
しかしながら、図8のような構成では、減速機構として歯車やタイミングベルト等を介しているために、バンディング要因となる歯の噛合い周波数が問題となる。また、図9のような構成では、減速機構はないものの、高トルクを必要とするために、大口径のダイレクトドライブモータが必要となり、消費電力が増大して駆動回路が大型化してしまうという問題がある。更に特許文献1の技術では、補助駆動モータを必要とし、装置の大型化、製品コストの上昇という問題もある。
本発明は、上述した実情を考慮してなされたものであって、感光体ドラムが接続されたフライホイールの回転制御を行なうことにより、色ズレやバンディングが発生し難い画像形成装置を提供することを目的とする。
本発明は、上述した実情を考慮してなされたものであって、感光体ドラムが接続されたフライホイールの回転制御を行なうことにより、色ズレやバンディングが発生し難い画像形成装置を提供することを目的とする。
上記の課題を解決するために、請求項1に記載の画像形成装置は、定速での回転制御を必要とする慣性体を有する画像形成装置において、前記慣性体の軸方向端部側に慣性体と同軸状に剛接合したフライホイールと、前記フライホイール外周部に設けられてフライホイールを駆動する回転推進部と、該回転推進部の駆動力により前記慣性体を回転および回転制御する制御装置と、を備えたことを特徴とする。
また、請求項2は、請求項1記載の画像形成装置において、前記回転推進部は、磁力を用いて駆動力を得るようにしたことを特徴とする。
また、請求項3は、請求項1または2記載の画像形成装置において、前記フライホイールの外周部分に回転角検出用のスケールを設け、該スケールを読み取る位置センサにより回転角度を検出することを特徴とする。
また、請求項4は、請求項3記載の画像形成装置において、前記センサを回転軸をはさんで対向する位置に2つ配置したことを特徴とする。
また、請求項5は、請求項1、2または3記載の画像形成装置において、センサ出力を補正するための補正用データを記憶した補正用メモリを設け、前記センサ出力を補正して回転角度を検出するようにしたことを特徴とする。
また、請求項2は、請求項1記載の画像形成装置において、前記回転推進部は、磁力を用いて駆動力を得るようにしたことを特徴とする。
また、請求項3は、請求項1または2記載の画像形成装置において、前記フライホイールの外周部分に回転角検出用のスケールを設け、該スケールを読み取る位置センサにより回転角度を検出することを特徴とする。
また、請求項4は、請求項3記載の画像形成装置において、前記センサを回転軸をはさんで対向する位置に2つ配置したことを特徴とする。
また、請求項5は、請求項1、2または3記載の画像形成装置において、センサ出力を補正するための補正用データを記憶した補正用メモリを設け、前記センサ出力を補正して回転角度を検出するようにしたことを特徴とする。
本発明によれば、慣性体とフライホイールが剛接合されているので、捩りによる機構固有の共振周波数を高くすることができ、制御帯域を高めることができる。このため、電子写真式カラープリンタ等に用いた場合には、色ずれ低減は勿論、バンディングの低減にも効果がある。また、駆動方式がダイレクトドライブでありながら、駆動部が回転中心から遠いため、回転軸の高トルク低速回転に適しており、要求される駆動部の駆動力も少なくて済み、より低い消費電力で回転および回転制御が可能となる。
また、大径フライホイールの外周部分に角度検出器を設けることにより、容易に高精度、高分解能な角度検出が可能となる。
また、フライホイールの外周部分に対向して2つの角度検出器を設けることにより、スケール誤差を低減して角度検出の精度を上げることができる。
さらに、組み付け時に高精度エンコーダで計測した補正用データを用いて回転制御を行うので、フライホイールの外周部分に1つの角度検出器を設けるのみで、スケール誤差を低減することができる。
また、大径フライホイールの外周部分に角度検出器を設けることにより、容易に高精度、高分解能な角度検出が可能となる。
また、フライホイールの外周部分に対向して2つの角度検出器を設けることにより、スケール誤差を低減して角度検出の精度を上げることができる。
さらに、組み付け時に高精度エンコーダで計測した補正用データを用いて回転制御を行うので、フライホイールの外周部分に1つの角度検出器を設けるのみで、スケール誤差を低減することができる。
以下、図面を参照して、本発明の実施形態を詳細に説明する。
図1は、本発明の画像形成装置に係かる感光ドラム駆動機構の構成を示す図である。
図1では、減速機構なしに感光ドラムを高トルク低速回転させるために、感光ドラム(慣性体)の軸方向端部に取り付けられた大径フライホイール102の外周部分を直接駆動するように、外周部分に回転駆動力を発生する直動モータ(回転推進部)を設ける構成となっている。これにより、駆動部が回転中心から離れているため、大きなトルクを少ない力で発生させることができ、かつ低速回転を得られ易い。
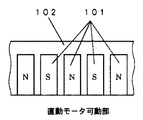
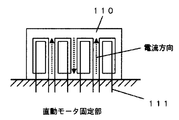
なお、直動モータは図3および図4に示すようにコイルプレートとマグネットプレートで構成される。図3は、フライホイール102の外周部分に形成されたマグネットプレート101を説明するための図である。また、図4は、可動部側のコイルプレート110の構成を示す図である。マグネットプレート101には極性が互い違いになるように磁石を取り付けておき、また、固定部側のコイルプレート110内部には、互い違いの方向にコイル111を巻いておき、このコイルに対して適切なタイミングで電流を流すことで、フレミングの左手の法則により直動モータが駆動する。
図1は、本発明の画像形成装置に係かる感光ドラム駆動機構の構成を示す図である。
図1では、減速機構なしに感光ドラムを高トルク低速回転させるために、感光ドラム(慣性体)の軸方向端部に取り付けられた大径フライホイール102の外周部分を直接駆動するように、外周部分に回転駆動力を発生する直動モータ(回転推進部)を設ける構成となっている。これにより、駆動部が回転中心から離れているため、大きなトルクを少ない力で発生させることができ、かつ低速回転を得られ易い。
なお、直動モータは図3および図4に示すようにコイルプレートとマグネットプレートで構成される。図3は、フライホイール102の外周部分に形成されたマグネットプレート101を説明するための図である。また、図4は、可動部側のコイルプレート110の構成を示す図である。マグネットプレート101には極性が互い違いになるように磁石を取り付けておき、また、固定部側のコイルプレート110内部には、互い違いの方向にコイル111を巻いておき、このコイルに対して適切なタイミングで電流を流すことで、フレミングの左手の法則により直動モータが駆動する。
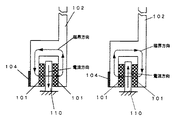
図5は、フライホイール102の外周部の断面図である。フライホイール102の二股に分かれた外周部のそれぞれの内側には直動モータの磁極を形成するマグネットプレート101が全外周に設けてあり、2つのマグネットプレート101の隙間にはコイルプレート110が極わずかなギャップを保って位置するように、フライホイール102とは独立に固定して設置されている。左側の図のように、コイルプレート110の一つのコイルに下向きの電流が流れると、コイルの右側にN極が出来るように破線矢印の方向に磁力線が発生する。したがって、このようなときにコイルの右側にメグネットプレート101を構成するS極が近づくと吸引され、反対にN極が離れようとすると反発し回転力を生じることになる。このようにしてコイルプレート110と、フライホイール102に設けたマグネットプレート101とで直動モータを形成している。
ところで、感光ドラム603の回転速度を一定に保つ位置制御を行うには、ドラムの回転角を知る必要がある。本発明では、大径フライホイール102の外周部分にはスケール104が設けてあり、光センサ105aおよび105bを設けることにより、光学的にスケール104をセンスして、感光ドラム603の回転角を検出するようにしている。スケール104とセンサ105の取り付け位置が回転中心(回転軸)から離れているため、外周部の線速が速くなることから高精度高分解能を容易に得ることができる。また回転軸に対して対象となる位置にそれぞれセンサ105を配置することにより、センサの検出誤差を打ち消して検出精度を高めている。
フライホイール102の外周部に取り付けるスケール104としては、磁気の影響を受けない光学式エンコーダが適している。また光学式においても透過式と反射式があるが、いずれも実装可能である。透過式は、コードホイール(=回転式スケール)外周部に形成された可動スリットと、センサ側の固定スリットとの間の窓を光が通過する光量を検出する方法であり、反射式はスケールの反射係数を交互に変えることにより、投光した光の反射する光量を検出する方法である。
ところで、感光ドラム603の回転速度を一定に保つ位置制御を行うには、ドラムの回転角を知る必要がある。本発明では、大径フライホイール102の外周部分にはスケール104が設けてあり、光センサ105aおよび105bを設けることにより、光学的にスケール104をセンスして、感光ドラム603の回転角を検出するようにしている。スケール104とセンサ105の取り付け位置が回転中心(回転軸)から離れているため、外周部の線速が速くなることから高精度高分解能を容易に得ることができる。また回転軸に対して対象となる位置にそれぞれセンサ105を配置することにより、センサの検出誤差を打ち消して検出精度を高めている。
フライホイール102の外周部に取り付けるスケール104としては、磁気の影響を受けない光学式エンコーダが適している。また光学式においても透過式と反射式があるが、いずれも実装可能である。透過式は、コードホイール(=回転式スケール)外周部に形成された可動スリットと、センサ側の固定スリットとの間の窓を光が通過する光量を検出する方法であり、反射式はスケールの反射係数を交互に変えることにより、投光した光の反射する光量を検出する方法である。
次に、回転制御の動作を説明する。コイルプレート110とマグネットプレート101で構成される直動モータの駆動力によりフライホイール102が回転し、これに剛的に接合された感光ドラム603が回転する。そしてフライホイール102の外周上にあるエンコーダ用スケール104も感光ドラム603と同じ回転数で回転する。このスケール104を2つのセンサ105a、105bで読み取ることで、感光ドラム603の回転角を精度よく知ることができる。感光ドラムの回転角に応じた数だけパルスがセンサ105から出力されるため、検出装置607では、このパルス数を計数することによりドラム回転角を検出することができる。このとき、フライホイール102の外周部分に対向させて2つのセンサ(105a、105b)を設けることにより、フライホイール102外周上に設けられたスケール104の組み付け誤差やスケール精度に対して2つのセンサ出力誤差が相殺し合うため、精度良く回転角度を検出することができる。そして、制御装置608ではドラム回転角と目標回転角の偏差に応じた操作量を算出し、駆動装置609にて、この操作量に相当する電流を直動モータのコイルに流すための印加電圧を発生する。直動モータでは印加電圧の変化により、大径フライホイール102の回転を制御して、剛接合された感光ドラム102の回転を一定に保つようにしている。
なお、DCモータではトルクは電流に比例することから、本発明では操作量としてモータのコイルに流れる電流I(s)を用いている。駆動装置609内部では、この電流I(s)が指令電流(=制御装置608からの出力)に従って流れるように、モータへ印加する電圧E(s)を発生させる。参考として、DCモータにおける印加電圧E(s)から電流I(s)までの伝達関数を示すと次のようになる。
I(s)=(E(s)−Kω(s))/(sL+R)
ここで、Kは誘起電圧定数、ω(s)は電機子(ロータ)角速度で、sはラプラス演算子、Lは電機子インダクタンス、Rは電機子抵抗である。直動モータは円筒状の回転式モータを直線状に展開した構造と考えることができるので、駆動方法は回転式モータと同様であり、制御方法も従来技術を適用できる。
なお、DCモータではトルクは電流に比例することから、本発明では操作量としてモータのコイルに流れる電流I(s)を用いている。駆動装置609内部では、この電流I(s)が指令電流(=制御装置608からの出力)に従って流れるように、モータへ印加する電圧E(s)を発生させる。参考として、DCモータにおける印加電圧E(s)から電流I(s)までの伝達関数を示すと次のようになる。
I(s)=(E(s)−Kω(s))/(sL+R)
ここで、Kは誘起電圧定数、ω(s)は電機子(ロータ)角速度で、sはラプラス演算子、Lは電機子インダクタンス、Rは電機子抵抗である。直動モータは円筒状の回転式モータを直線状に展開した構造と考えることができるので、駆動方法は回転式モータと同様であり、制御方法も従来技術を適用できる。
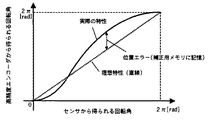
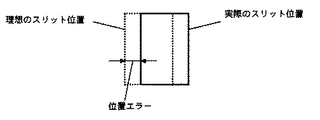
図2は、本発明の画像形成装置に係かる他の実施例を示す感光ドラム駆動機構の構成図である。本実施例では、センサ出力を補正するための補正用メモリ206を検出装置207に備えることにより、センサ105のみで回転角を高精度に検出できるようになっている。すなわち、検出装置207では図6に示すように、センサ105から得られる回転角(実線)を、補正用メモリ206から読み出した位置エラーで補正し、この値を制御装置608で読み取ることにより、高精度エンコーダ204で読み取る場合とほぼ同等の位置精度で回転角を読み取ることができる。ここでいう位置エラーとは、図7に示すように、感光ドラム603が実際に回転した角度(=高精度エンコーダ204から得られる回転角度)とセンサ105の出力パルス数から求められる回転角度との差である。
このことにより、スケール自身の精度誤差に関しても、予め組み付け時に高精度エンコーダ204を用いて計測しておき、この計測値を補正用メモリ206に記憶することにより、高精度エンコーダ204を取り外した状態(出荷時および通常使用時)でも補正用メモリ206に記憶された補正値を用いてセンサ105のみで精度よく回転角を検出することができる。
なお、以上の実施例では慣性体として感光ドラムを例に説明してきたが、転写ローラ、転写ベルト駆動ローラ等の回転を制御する必要がある慣性体にも適用できる。
このことにより、スケール自身の精度誤差に関しても、予め組み付け時に高精度エンコーダ204を用いて計測しておき、この計測値を補正用メモリ206に記憶することにより、高精度エンコーダ204を取り外した状態(出荷時および通常使用時)でも補正用メモリ206に記憶された補正値を用いてセンサ105のみで精度よく回転角を検出することができる。
なお、以上の実施例では慣性体として感光ドラムを例に説明してきたが、転写ローラ、転写ベルト駆動ローラ等の回転を制御する必要がある慣性体にも適用できる。
101 マグネットプレート(直動モータ可動側)、102 フライホイール、104 スケール、105 センサ、110 コイルプレート(直動モータ固定側)、111 コイル、204 ロータリエンコーダ、206 補正用メモリ、207 検出装置、601 ベルト減速機構、602 フライホイール、603 感光ドラム、604 ロータリエンコーダ、607 検出装置、608 制御装置、609 駆動装置、610 駆動モータ
Claims (5)
- 定速での回転制御を必要とする慣性体を有する画像形成装置において、前記慣性体の軸方向端部側に慣性体と同軸状に剛接合したフライホイールと、前記フライホイール外周部に設けられてフライホイールを駆動する回転推進部と、該回転推進部の駆動力により前記慣性体を回転および回転制御する制御装置と、を備えたことを特徴とする画像形成装置。
- 前記回転推進部は、磁力を用いて駆動力を得るように構成したことを特徴とする請求項1記載の画像形成装置。
- 前記フライホイールの外周部分に回転角検出用のスケールを設け、該スケールを読み取る位置センサにより回転角度を検出することを特徴とする請求項1または2記載の画像形成装置。
- 前記センサを、回転軸をはさんで対向する位置に2つ配置したことを特徴とする請求項3記載の画像形成装置。
- 請求項1、2または3記載の画像形成装置において、センサ出力を補正するための補正用データを記憶した補正用メモリを設け、前記センサ出力を補正して回転角度を検出する制御装置を備えたことを特徴とする画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110044A JP2005292632A (ja) | 2004-04-02 | 2004-04-02 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110044A JP2005292632A (ja) | 2004-04-02 | 2004-04-02 | 画像形成装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292632A true JP2005292632A (ja) | 2005-10-20 |
Family
ID=35325594
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004110044A Pending JP2005292632A (ja) | 2004-04-02 | 2004-04-02 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005292632A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009134144A (ja) * | 2007-11-30 | 2009-06-18 | Ricoh Co Ltd | 画像形成装置 |
-
2004
- 2004-04-02 JP JP2004110044A patent/JP2005292632A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009134144A (ja) * | 2007-11-30 | 2009-06-18 | Ricoh Co Ltd | 画像形成装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8849134B2 (en) | Image forming apparatus having banding correction function | |
| JP2012014055A5 (ja) | ||
| JP4312570B2 (ja) | 回転体駆動制御方法及びその装置、画像形成装置、プロセスカートリッジ、プログラム、並びに記録媒体 | |
| JPH09175687A (ja) | ベルト搬送装置 | |
| JP2000162941A (ja) | 画像形成装置 | |
| CN102236288A (zh) | 图像形成设备 | |
| JP5102518B2 (ja) | 画像形成装置 | |
| US9389546B2 (en) | Image forming apparatus with intermediate toner transfer medium, control method therefor, and storage medium storing control program therefor | |
| JP2002139112A (ja) | 無端状ベルト駆動装置および画像形成装置 | |
| JP5509778B2 (ja) | ベルト搬送装置と画像形成装置 | |
| JP5203823B2 (ja) | 画像形成装置、画像形成装置の制御方法、プログラム及び記憶媒体 | |
| JP2005292632A (ja) | 画像形成装置 | |
| JP2006058364A (ja) | 画像形成装置 | |
| JP2009183113A (ja) | モータ、回転制御装置、及び回転検出回路 | |
| JP4663282B2 (ja) | ベルト搬送装置および画像形成装置 | |
| JP4339079B2 (ja) | 転写ベルトの速度制御方法及び転写ベルトの速度制御装置及びこれを用いた画像形成装置 | |
| US20050129427A1 (en) | Rotary member driving mechanism, and image forming apparatus employing this mechanism | |
| JP2007078538A (ja) | モータ、回転制御装置、及び回転検出回路 | |
| JP6569635B2 (ja) | モーター制御装置、及び画像形成装置 | |
| JP2005309309A (ja) | カラー画像形成装置の駆動制御装置 | |
| JP4564314B2 (ja) | 画像形成装置 | |
| JP5173851B2 (ja) | 画像形成装置 | |
| JP2006084669A (ja) | カラー画像形成装置における感光体駆動制御 | |
| JP5398431B2 (ja) | 画像形成装置 | |
| JP2008176149A (ja) | 画像形成装置 |