JP2005291858A - 振動型ジャイロセンサ素子 - Google Patents
振動型ジャイロセンサ素子 Download PDFInfo
- Publication number
- JP2005291858A JP2005291858A JP2004105885A JP2004105885A JP2005291858A JP 2005291858 A JP2005291858 A JP 2005291858A JP 2004105885 A JP2004105885 A JP 2004105885A JP 2004105885 A JP2004105885 A JP 2004105885A JP 2005291858 A JP2005291858 A JP 2005291858A
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- electrode
- sensor element
- detection electrode
- gyro sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A23—FOODS OR FOODSTUFFS; TREATMENT THEREOF, NOT COVERED BY OTHER CLASSES
- A23N—MACHINES OR APPARATUS FOR TREATING HARVESTED FRUIT, VEGETABLES OR FLOWER BULBS IN BULK, NOT OTHERWISE PROVIDED FOR; PEELING VEGETABLES OR FRUIT IN BULK; APPARATUS FOR PREPARING ANIMAL FEEDING- STUFFS
- A23N5/00—Machines for hulling, husking or cracking nuts
- A23N5/08—Machines for hulling, husking or cracking nuts for removing fleshy or fibrous hulls of nuts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26D—CUTTING; DETAILS COMMON TO MACHINES FOR PERFORATING, PUNCHING, CUTTING-OUT, STAMPING-OUT OR SEVERING
- B26D1/00—Cutting through work characterised by the nature or movement of the cutting member or particular materials not otherwise provided for; Apparatus or machines therefor; Cutting members therefor
- B26D1/01—Cutting through work characterised by the nature or movement of the cutting member or particular materials not otherwise provided for; Apparatus or machines therefor; Cutting members therefor involving a cutting member which does not travel with the work
- B26D1/44—Cutting through work characterised by the nature or movement of the cutting member or particular materials not otherwise provided for; Apparatus or machines therefor; Cutting members therefor involving a cutting member which does not travel with the work having a cup or like cutting member
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Chemical & Material Sciences (AREA)
- Food Science & Technology (AREA)
- Polymers & Plastics (AREA)
- Forests & Forestry (AREA)
- Mechanical Engineering (AREA)
- Gyroscopes (AREA)
Abstract
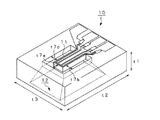
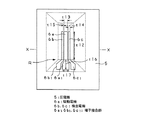
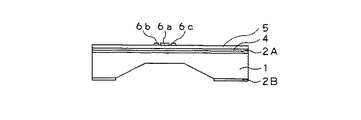
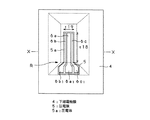
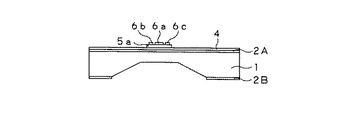
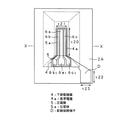
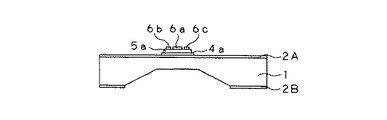
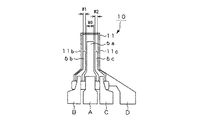
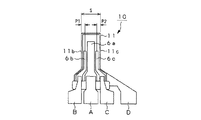
【解決手段】 単結晶シリコン基板上に薄膜形成プロセスにより形成された下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子11が、上部電極として、振動子11を振動させる電圧を印加する振動子11の長手方向に形成された駆動電極6aと、駆動電極6aを挟む形で、駆動電極6aと接触することなく平行に振動子11の長手方向に形成された第1の検出電極6b及び第2の検出電極6cとを有し、駆動電極6aの幅をW0、第1の検出電極6bの幅をW1、第2の検出電極6cの幅をW2、W=W0+W1+W2とした場合に、条件として、0.5<(W0/W)<1を満たすことで実現する。
【選択図】図35
Description
<実施例>
続いて、実施例として、上述した振動型ジャイロセンサ素子10を実際に作製し、その製造方法について説明をする。
まず、駆動電極6aの幅を変化させた場合について説明をする。なお、上述までの説明においては、駆動電極6aの幅をt13、検出電極6b,6cの幅をt14として説明しているが、以下の説明においては、駆動電極6aの幅をW0、検出電極6b,6cの幅をそれぞれW1,W2として再定義する。
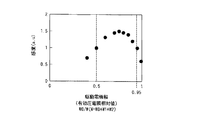
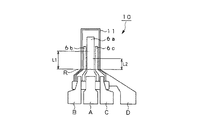
続いて、検出電極6aの長さを変化させた場合について説明をする。図38に、検出電極6b,6cの長さを変化させた振動型ジャイロセンサ素子10を示し、図39に、この振動型ジャイロセンサ素子10の感度を測定した結果を示す。
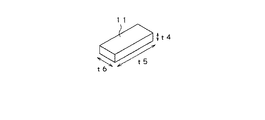
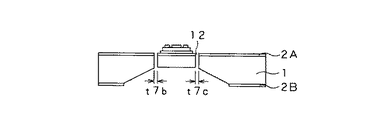
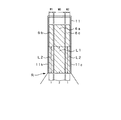
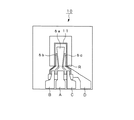
次に、検出電極6b,6cの振動子11上における位置を変化させた場合について説明をする。なお、上述までの説明においては、振動子11の幅をt6として説明しているが、以下の説明においては、振動子11の幅をSとして再定義する。
Claims (38)
- 単結晶シリコン基板上に薄膜形成プロセスにより形成された下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子であって、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
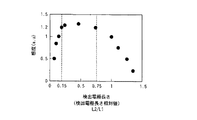
上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(1)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(L2/L1)≦0.75 - さらに、以下に示す条件(2)を満たすこと
を特徴とする請求項1記載の振動型ジャイロセンサ素子。
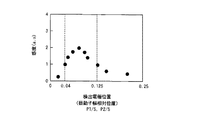
(2)0.15≦(L2/L1)≦0.75 - 上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(3),(4)を満たすこと
を特徴とする請求項1記載の振動型ジャイロセンサ素子。
(3)0<(P1/S)<0.125
(4)0<(P2/S)<0.125 - さらに、以下に示す条件(5),(6)を満たすこと
を特徴とする請求項3記載の振動型ジャイロセンサ素子。
(5)0.04≦(P1/S)<0.125
(6)0.04≦(P2/S)<0.125 - 上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(7)を満たすこと
を特徴とする請求項1記載の振動型ジャイロセンサ素子。
(7)0.5<(W0/W)<1 - さらに、以下に示す条件(8)を満たすこと
を特徴とする請求項5記載の振動型ジャイロセンサ素子。
(8)0.5<(W0/W)≦0.95 - 下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子において、
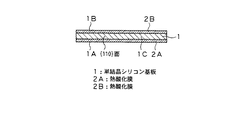
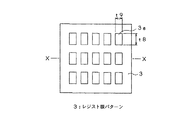
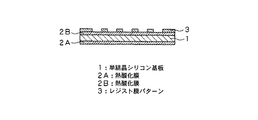
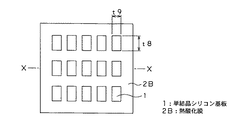
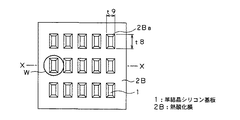
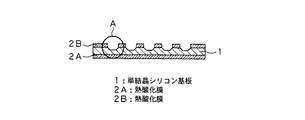
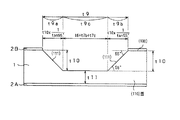
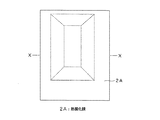
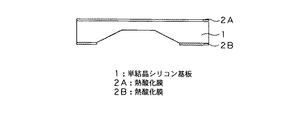
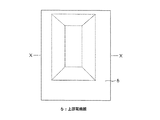
一方主面及び他方主面の面方位が{100}である単結晶シリコン基板の一方主面上に、{110}面に対して平行又は垂直な直線で構成された第1の開口部を有する第1の保護膜パターンを形成し、上記第1の開口部に対して上記振動子の厚みとなるまで結晶異方性エッチングを行い、
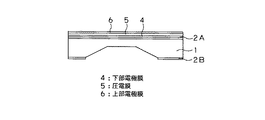
上記振動子の厚みとなるまで結晶異方性エッチングされた上記一方主面に対向する上記他方主面上の上記振動子となる領域に、上記下部電極、上記圧電薄膜、上記上部電極を順に積層して形成し、
上記下部電極、上記圧電薄膜、上記上部電極が形成された上記他方主面上に、上記{110}面に対して平行又は垂直な直線で構成され、上記振動子を上記片持ち梁形状とする空隙を型取った第2の開口部を有する第2の保護膜パターンを形成し、上記第2の開口部に対して反応性イオンエッチング(RIE:Reactive Ion Etching)を行うことで形成された上記振動子を備え、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(1)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(L2/L1)≦0.75
但し、“{ }”は、方向が異なる等価な面方位を総称して表すための記号である。 - さらに、以下に示す条件(2)を満たすこと
を特徴とする請求項7記載の振動型ジャイロセンサ素子。
(2)0.15≦(L2/L1)≦0.75 - 上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(3),(4)を満たすこと
を特徴とする請求項7記載の振動型ジャイロセンサ素子。
(3)0<(P1/S)<0.125
(4)0<(P2/S)<0.125 - さらに、以下に示す条件(5),(6)を満たすこと
を特徴とする請求項9記載の振動型ジャイロセンサ素子。
(5)0.04≦(P1/S)<0.125
(6)0.04≦(P2/S)<0.125 - 上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(7)を満たすこと
を特徴とする請求項7記載の振動型ジャイロセンサ素子。
(7)0.5<(W0/W)<1 - さらに、以下に示す条件(8)を満たすこと
を特徴とする請求項11記載の振動型ジャイロセンサ素子。
(8)0.5<(W0/W)≦0.95 - 単結晶シリコン基板上に薄膜形成プロセスにより形成された下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子であって、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(1),(2)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(P1/S)<0.125
(2)0<(P2/S)<0.125 - さらに、以下に示す条件(3),(4)を満たすこと
を特徴とする請求項13記載の振動型ジャイロセンサ素子。
(3)0.04≦(P1/S)<0.125
(4)0.04≦(P2/S)<0.125 - 上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(5)を満たすこと
を特徴とする請求項13記載の振動型ジャイロセンサ素子。
(5)0.15≦(L2/L1)≦0.75 - 上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(6)を満たすこと
を特徴とする請求項13記載の振動型ジャイロセンサ素子。
(6)0.5<(W0/W)<1 - さらに、以下に示す条件(7)を満たすこと
を特徴とする請求項16記載の振動型ジャイロセンサ素子。
(7)0.5<(W0/W)≦0.95 - 下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子において、
一方主面及び他方主面の面方位が{100}である単結晶シリコン基板の一方主面上に、{110}面に対して平行又は垂直な直線で構成された第1の開口部を有する第1の保護膜パターンを形成し、上記第1の開口部に対して上記振動子の厚みとなるまで結晶異方性エッチングを行い、
上記振動子の厚みとなるまで結晶異方性エッチングされた上記一方主面に対向する上記他方主面上の上記振動子となる領域に、上記下部電極、上記圧電薄膜、上記上部電極を順に積層して形成し、
上記下部電極、上記圧電薄膜、上記上部電極が形成された上記他方主面上に、上記{110}面に対して平行又は垂直な直線で構成され、上記振動子を上記片持ち梁形状とする空隙を型取った第2の開口部を有する第2の保護膜パターンを形成し、上記第2の開口部に対して反応性イオンエッチング(RIE:Reactive Ion Etching)を行うことで形成された上記振動子を備え、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(1),(2)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(P1/S)<0.125
(2)0<(P2/S)<0.125
但し、“{ }”は、方向が異なる等価な面方位を総称して表すための記号である。 - さらに、以下に示す条件(3),(4)を満たすこと
を特徴とする請求項18記載の振動型ジャイロセンサ素子。
(3)0.04≦(P1/S)<0.125
(4)0.04≦(P2/S)<0.125 - 上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(5)を満たすこと
を特徴とする請求項18記載の振動型ジャイロセンサ素子。
(5)0.15≦(L2/L1)≦0.75 - 上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(6)を満たすこと
を特徴とする請求項18記載の振動型ジャイロセンサ素子。
(6)0.5<(W0/W)<1 - さらに、以下に示す条件(7)を満たすこと
を特徴とする請求項21記載の振動型ジャイロセンサ素子。
(7)0.5<(W0/W)≦0.95 - 単結晶シリコン基板上に薄膜形成プロセスにより形成された下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子であって、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(1)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0.5<(W0/W)<1 - さらに、以下に示す条件(2)を満たすこと
を特徴とする請求項23記載の振動型ジャイロセンサ素子。
(2)0.5<(W0/W)≦0.95 - 上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(3)を満たすこと
を特徴とする請求項23記載の振動型ジャイロセンサ素子。
(3)0.15≦(L2/L1)≦0.75 - 上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(4),(5)を満たすこと
を特徴とする請求項23記載の振動型ジャイロセンサ素子。
(4)0.04≦(P1/S)<0.125
(5)0.04≦(P2/S)<0.125 - 下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子において、
一方主面及び他方主面の面方位が{100}である単結晶シリコン基板の一方主面上に、{110}面に対して平行又は垂直な直線で構成された第1の開口部を有する第1の保護膜パターンを形成し、上記第1の開口部に対して上記振動子の厚みとなるまで結晶異方性エッチングを行い、
上記振動子の厚みとなるまで結晶異方性エッチングされた上記一方主面に対向する上記他方主面上の上記振動子となる領域に、上記下部電極、上記圧電薄膜、上記上部電極を順に積層して形成し、
上記下部電極、上記圧電薄膜、上記上部電極が形成された上記他方主面上に、上記{110}面に対して平行又は垂直な直線で構成され、上記振動子を上記片持ち梁形状とする空隙を型取った第2の開口部を有する第2の保護膜パターンを形成し、上記第2の開口部に対して反応性イオンエッチング(RIE:Reactive Ion Etching)を行うことで形成された上記振動子を備え、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とした場合に、以下に示す条件(1)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0.5<(W0/W)<1
但し、“{ }”は、方向が異なる等価な面方位を総称して表すための記号である。 - さらに、以下に示す条件(2)を満たすこと
を特徴とする請求項27記載の振動型ジャイロセンサ素子。
(2)0.5<(W0/W)≦0.95 - 上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離をL2、上記振動子の根元から上記第2の検出電極の重心位置までの距離を同じくL2とした場合に、以下に示す条件(3)を満たすこと
を特徴とする請求項27記載の振動型ジャイロセンサ素子。
(3)0.15≦(L2/L1)≦0.75 - 上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(4),(5)を満たすこと
を特徴とする請求項27記載の振動型ジャイロセンサ素子。
(4)0.04≦(P1/S)<0.125
(5)0.04≦(P2/S)<0.125 - 単結晶シリコン基板上に薄膜形成プロセスにより形成された下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子であって、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とし、
上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離及び上記振動子の根元から上記第2の検出電極の重心位置までの距離をL2とし、
上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(1)〜(4)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(L2/L1)≦0.75
(2)0<(P1/S)<0.125
(3)0<(P2/S)<0.125
(4)0.5<(W0/W)<1 - さらに、以下に示す条件(5)を満たすこと
を特徴とする請求項31記載の振動型ジャイロセンサ素子。
(5)0.15≦(L2/L1)≦0.75 - さらに、以下に示す条件(6),(7)を満たすこと
を特徴とする請求項31記載の振動型ジャイロセンサ素子。
(6)0.04≦(P1/S)<0.125
(7)0.04≦(P2/S)<0.125 - さらに、以下に示す条件(8)を満たすこと
を特徴とする請求項31記載の振動型ジャイロセンサ素子。
(8)0.5<(W0/W)≦0.95 - 下部電極、圧電薄膜、上部電極を有する片持ち梁形状の振動子を備え、上記圧電薄膜の圧電効果を利用して角速度を検出する振動型ジャイロセンサ素子において、
一方主面及び他方主面の面方位が{100}である単結晶シリコン基板の一方主面上に、{110}面に対して平行又は垂直な直線で構成された第1の開口部を有する第1の保護膜パターンを形成し、上記第1の開口部に対して上記振動子の厚みとなるまで結晶異方性エッチングを行い、
上記振動子の厚みとなるまで結晶異方性エッチングされた上記一方主面に対向する上記他方主面上の上記振動子となる領域に、上記下部電極、上記圧電薄膜、上記上部電極を順に積層して形成し、
上記下部電極、上記圧電薄膜、上記上部電極が形成された上記他方主面上に、上記{110}面に対して平行又は垂直な直線で構成され、上記振動子を上記片持ち梁形状とする空隙を型取った第2の開口部を有する第2の保護膜パターンを形成し、上記第2の開口部に対して反応性イオンエッチング(RIE:Reactive Ion Etching)を行うことで形成された上記振動子を備え、
上記振動子は、上記上部電極として、上記振動子を振動させる電圧を印加する上記振動子の長手方向に形成された駆動電極と、上記駆動電極を挟む形で、上記駆動電極と接触することなく平行に上記振動子の長手方向に形成された第1の検出電極及び第2の検出電極とを有し、
上記駆動電極の幅をW0、上記第1の検出電極の幅をW1、上記第2の検出電極の幅をW2、W=W0+W1+W2とし、
上記振動子の根元から上記駆動電極の重心位置までの距離をL1、上記振動子の根元から上記第1の検出電極の重心位置までの距離及び上記振動子の根元から上記第2の検出電極の重心位置までの距離をL2とし、
上記第1の検出電極が形成されている側の上記振動子の側壁面から、上記第1の検出電極の幅方向の中心位置までの最短距離をP1、上記第2の検出電極が形成されている側の上記振動子の側壁面から、上記第2の検出電極の幅方向の中心位置までの最短距離をP2、上記振動子の幅をSとした場合に、以下に示す条件(1)〜(4)を満たすこと
を特徴とする振動型ジャイロセンサ素子。
(1)0<(L2/L1)≦0.75
(2)0<(P1/S)<0.125
(3)0<(P2/S)<0.125
(4)0.5<(W0/W)<1 - さらに、以下に示す条件(5)を満たすこと
を特徴とする請求項35記載の振動型ジャイロセンサ素子。
(5)0.15≦(L2/L1)≦0.75 - さらに、以下に示す条件(6),(7)を満たすこと
を特徴とする請求項35記載の振動型ジャイロセンサ素子。
(6)0.04≦(P1/S)<0.125
(7)0.04≦(P2/S)<0.125 - さらに、以下に示す条件(8)を満たすこと
を特徴とする請求項35記載の振動型ジャイロセンサ素子。
(8)0.5<(W0/W)≦0.95
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105885A JP4478495B2 (ja) | 2004-03-31 | 2004-03-31 | 振動型ジャイロセンサ素子及びその製造方法 |
| US11/088,480 US7263884B2 (en) | 2004-03-31 | 2005-03-24 | Vibration type gyrosensor device |
| KR20050026251A KR101119257B1 (ko) | 2004-03-31 | 2005-03-30 | 진동형 자이로 센서 소자 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105885A JP4478495B2 (ja) | 2004-03-31 | 2004-03-31 | 振動型ジャイロセンサ素子及びその製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005291858A true JP2005291858A (ja) | 2005-10-20 |
| JP4478495B2 JP4478495B2 (ja) | 2010-06-09 |
Family
ID=35185700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004105885A Expired - Fee Related JP4478495B2 (ja) | 2004-03-31 | 2004-03-31 | 振動型ジャイロセンサ素子及びその製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7263884B2 (ja) |
| JP (1) | JP4478495B2 (ja) |
| KR (1) | KR101119257B1 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008026018A (ja) * | 2006-07-18 | 2008-02-07 | Nec Tokin Corp | 圧電単結晶振動子および圧電振動ジャイロ |
| JP2009264863A (ja) * | 2008-04-24 | 2009-11-12 | Microstone Corp | ジャイロセンサ振動体 |
| US7830215B2 (en) | 2007-01-25 | 2010-11-09 | Seiko Epson Corporation | Piezoelectric oscillator and method for manufacturing the same |
| US7913560B2 (en) | 2007-03-19 | 2011-03-29 | Seiko Epson Corporation | Angular rate sensor and electronic device |
| US7950282B2 (en) | 2007-03-23 | 2011-05-31 | Seiko Epson Corporation | Acceleration sensor incorporating a piezoelectric device |
| US7954377B2 (en) | 2007-03-28 | 2011-06-07 | Seiko Epson Corporation | Acceleration sensor incorporating a piezoelectric device |
| US8120178B2 (en) | 2006-03-29 | 2012-02-21 | Seiko Epson Corporation | Tuning fork vibration device and method for manufacturing the same |
| US8136399B2 (en) | 2007-12-26 | 2012-03-20 | Rohm Co., Ltd. | Angular rate sensor with vibrator |
| US8297120B2 (en) | 2007-08-31 | 2012-10-30 | Rohm Co., Ltd. | Angular velocity signal detection circuit and angular velocity signal detection method |
| CN104596491A (zh) * | 2013-10-30 | 2015-05-06 | 精工爱普生株式会社 | 振动片、角速度传感器、电子设备以及移动体 |
| CN104596490A (zh) * | 2013-10-30 | 2015-05-06 | 精工爱普生株式会社 | 振动片及其制造方法、角速度传感器、电子设备及移动体 |
| US10488199B2 (en) * | 2014-12-18 | 2019-11-26 | Innalabs Limited | Gyroscope with piezoelectric monocrystal transducers |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7497962B2 (en) * | 2004-08-06 | 2009-03-03 | Canon Kabushiki Kaisha | Method of manufacturing liquid discharge head and method of manufacturing substrate for liquid discharge head |
| JP5135683B2 (ja) * | 2005-02-28 | 2013-02-06 | ソニー株式会社 | 振動型ジャイロセンサ及び振動素子の製造方法 |
| JP2008157701A (ja) * | 2006-12-22 | 2008-07-10 | Sony Corp | 圧電素子、振動型ジャイロセンサ、電子機器及び圧電素子の製造方法 |
| JP5088540B2 (ja) * | 2007-05-16 | 2012-12-05 | ソニー株式会社 | 検出装置、検出方法及び電子機器 |
| CN101556290B (zh) * | 2009-04-23 | 2010-12-01 | 上海交通大学 | 可测量任意方向角速度的气体陀螺仪 |
| KR101179387B1 (ko) * | 2010-05-11 | 2012-09-04 | 삼성전기주식회사 | 잉크젯 프린트 헤드 및 이를 구비하는 잉크젯 프린터 |
| US9590587B1 (en) | 2011-07-07 | 2017-03-07 | Analog Devices, Inc. | Compensation of second order temperature dependence of mechanical resonator frequency |
| US9013088B1 (en) | 2011-07-07 | 2015-04-21 | Sand 9, Inc. | Field effect control of a microelectromechanical (MEMS) resonator |
| US9214623B1 (en) | 2012-01-18 | 2015-12-15 | Analog Devices, Inc. | Doped piezoelectric resonator |
| JP6705283B2 (ja) | 2016-05-20 | 2020-06-03 | 株式会社デンソー | ジャイロセンサ装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4443729A (en) * | 1981-06-22 | 1984-04-17 | Rockwell International Corporation | Piezoceramic bender element having an electrode arrangement suppressing signal development in mount region |
| JP2741629B2 (ja) * | 1990-10-09 | 1998-04-22 | キヤノン株式会社 | カンチレバー型プローブ、それを用いた走査型トンネル顕微鏡及び情報処理装置 |
| US5802684A (en) * | 1993-09-14 | 1998-09-08 | Nikon Corporation | Process for producing a vibration angular-velocity sensor |
| US5794080A (en) * | 1994-08-31 | 1998-08-11 | Nikon Corporation | Piezoelectric vibration angular velocity meter and camera using the same |
| JPH1019574A (ja) | 1996-06-27 | 1998-01-23 | Nikon Corp | 圧電振動角速度計の製造方法 |
| JPH10339638A (ja) | 1997-06-06 | 1998-12-22 | Murata Mfg Co Ltd | 角速度センサ |
| JP2002372419A (ja) * | 2001-06-13 | 2002-12-26 | Matsushita Electric Ind Co Ltd | 角速度センサ |
-
2004
- 2004-03-31 JP JP2004105885A patent/JP4478495B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-24 US US11/088,480 patent/US7263884B2/en not_active Expired - Lifetime
- 2005-03-30 KR KR20050026251A patent/KR101119257B1/ko not_active Expired - Fee Related
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8120178B2 (en) | 2006-03-29 | 2012-02-21 | Seiko Epson Corporation | Tuning fork vibration device and method for manufacturing the same |
| JP2008026018A (ja) * | 2006-07-18 | 2008-02-07 | Nec Tokin Corp | 圧電単結晶振動子および圧電振動ジャイロ |
| US7830215B2 (en) | 2007-01-25 | 2010-11-09 | Seiko Epson Corporation | Piezoelectric oscillator and method for manufacturing the same |
| US7913560B2 (en) | 2007-03-19 | 2011-03-29 | Seiko Epson Corporation | Angular rate sensor and electronic device |
| US7950282B2 (en) | 2007-03-23 | 2011-05-31 | Seiko Epson Corporation | Acceleration sensor incorporating a piezoelectric device |
| US7954377B2 (en) | 2007-03-28 | 2011-06-07 | Seiko Epson Corporation | Acceleration sensor incorporating a piezoelectric device |
| US8297120B2 (en) | 2007-08-31 | 2012-10-30 | Rohm Co., Ltd. | Angular velocity signal detection circuit and angular velocity signal detection method |
| US8136399B2 (en) | 2007-12-26 | 2012-03-20 | Rohm Co., Ltd. | Angular rate sensor with vibrator |
| JP2009264863A (ja) * | 2008-04-24 | 2009-11-12 | Microstone Corp | ジャイロセンサ振動体 |
| CN104596491A (zh) * | 2013-10-30 | 2015-05-06 | 精工爱普生株式会社 | 振动片、角速度传感器、电子设备以及移动体 |
| CN104596490A (zh) * | 2013-10-30 | 2015-05-06 | 精工爱普生株式会社 | 振动片及其制造方法、角速度传感器、电子设备及移动体 |
| JP2015087257A (ja) * | 2013-10-30 | 2015-05-07 | セイコーエプソン株式会社 | 振動片、角速度センサー、電子機器及び移動体並びに振動片の製造方法 |
| CN104596490B (zh) * | 2013-10-30 | 2019-01-01 | 精工爱普生株式会社 | 振动片及其制造方法、角速度传感器、电子设备及移动体 |
| US10488199B2 (en) * | 2014-12-18 | 2019-11-26 | Innalabs Limited | Gyroscope with piezoelectric monocrystal transducers |
Also Published As
| Publication number | Publication date |
|---|---|
| US7263884B2 (en) | 2007-09-04 |
| KR101119257B1 (ko) | 2012-03-15 |
| JP4478495B2 (ja) | 2010-06-09 |
| US20050241395A1 (en) | 2005-11-03 |
| KR20060044964A (ko) | 2006-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4478495B2 (ja) | 振動型ジャイロセンサ素子及びその製造方法 | |
| US7401516B2 (en) | Vibration gyro sensor element with cantilever vibrator extending from substrate and positioned within opening in substrate | |
| JP2004079869A (ja) | 共振デバイスの製造方法 | |
| JP2007043054A (ja) | 圧電素子及びその製造方法 | |
| JP2008241547A (ja) | 加速度センサおよび電子機器 | |
| JP5451396B2 (ja) | 角速度検出装置 | |
| JP2005227110A (ja) | 振動型ジャイロセンサ素子の製造方法及び振動型ジャイロセンサ素子 | |
| WO2006006361A1 (ja) | 角速度センサおよびその製造方法 | |
| JP3891182B2 (ja) | 振動型ジャイロセンサ素子の製造方法及び離調度調整方法 | |
| JP4010218B2 (ja) | 圧電振動片の製造方法 | |
| JP4441729B2 (ja) | 電子機器 | |
| JP5353651B2 (ja) | 角速度センサの製造方法 | |
| JP2008233029A (ja) | 加速度センサおよび電子機器 | |
| JP2008224628A (ja) | 角速度センサ及び電子機器 | |
| JP2005331485A (ja) | 圧電素子および電気機械変換装置 | |
| JP2009231484A (ja) | 圧電型memsおよび圧電型memsの製造方法 | |
| JP2008082850A (ja) | 振動素子及びその製造方法 | |
| JP5421651B2 (ja) | 3軸角速度検出振動子、3軸角速度検出装置および3軸角速度検出システム | |
| JPH07113643A (ja) | 圧電振動角速度計 | |
| JP2008244552A (ja) | 圧電振動子およびその製造方法並びに電子装置 | |
| JP2008157701A (ja) | 圧電素子、振動型ジャイロセンサ、電子機器及び圧電素子の製造方法 | |
| JPH08327364A (ja) | 圧電振動角速度計の製造方法 | |
| JP4554118B2 (ja) | 音叉型角速度センサ素子の製造方法 | |
| JP2006242931A (ja) | 振動ジャイロセンサ素子の製造方法 | |
| JP3819343B2 (ja) | 圧電振動ジャイロ用柱状振動子およびその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070320 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070521 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080107 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20080111 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20080321 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100203 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100315 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4478495 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |