JP2005114535A - 道路種別判断装置 - Google Patents
道路種別判断装置 Download PDFInfo
- Publication number
- JP2005114535A JP2005114535A JP2003348720A JP2003348720A JP2005114535A JP 2005114535 A JP2005114535 A JP 2005114535A JP 2003348720 A JP2003348720 A JP 2003348720A JP 2003348720 A JP2003348720 A JP 2003348720A JP 2005114535 A JP2005114535 A JP 2005114535A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- road
- road type
- type determination
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 18
- 238000000034 method Methods 0.000 claims description 104
- 238000001514 detection method Methods 0.000 claims description 32
- 238000009434 installation Methods 0.000 claims description 8
- 230000002123 temporal effect Effects 0.000 claims description 4
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 21
- 239000000284 extract Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images














Landscapes
- Radar Systems Or Details Thereof (AREA)
- Instructional Devices (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】高速道路と一般道路が上下に併走している場合にも、自車両がいずれの道路上に存在するかを判断することが可能な道路種別判断装置を提供する
【解決手段】車両に搭載され、路面に描かれた走行車線を区切る白線を撮影する撮像手段と、撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、画像処理手段により抽出された白線の長さに基づいて、車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備える。
【選択図】 図1
【解決手段】車両に搭載され、路面に描かれた走行車線を区切る白線を撮影する撮像手段と、撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、画像処理手段により抽出された白線の長さに基づいて、車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備える。
【選択図】 図1
Description
本発明は、車両の走行案内を行う際に、高速道路と一般道路が上下に併走している区間において、自車両がいずれの道路上に存在するかを判断する道路種別判断装置に関する。
車両の走行案内を行う際に、現在車両が走行している道路の種別を判断する道路種別判断装置では、GPS等の位置検出装置を使用して車両の現在位置の検出し、地図情報と照合して道路上で位置を特定し、その道路の種別情報に基づいて判断していた。しかし、高速道路と一般道路が上下に併走している場合に、平面地図上では両道路が同じ位置にあるために、自車両がいずれの道路上に存在するかを判断することは難しい。そこで、車速を基に所定以上の速度を検出すると高速道路、停止が多いと一般道路というように判断していた。
特開2000−292191号
特開2002−221420号
しかし、高速道路でも道路構造や渋滞等で高速走行ができない場合もあり、速度だけで一義的に高速道路と一般道路を識別することは難しい。
本発明は、このような点に鑑みなされたもので、高速道路と一般道路が上下に併走している場合にも、自車両がいずれの道路上に存在するかを判断することが可能な道路種別判断装置を提供することを目的とする。
上記目的を達成するために、本発明は、車両に搭載され、路面に描かれた走行車線を区切る白線を撮影する撮像手段と、前記撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、前記画像処理手段により抽出された白線の長さに基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とするものである。
また、車両に搭載され、路面に描かれた走行車線を区切る白線を撮像する撮像手段と、前記撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、前記画像処理手段により抽出された白線の間隔に基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とするものである。
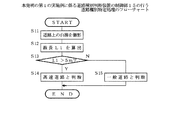
また、車両が、高速道路の入口付近に存在することを検出する入口付近検出手段と、前記車両の走行速度を検出する速度検出手段と、前記車両と該車両の前方を走行する先行車両との相対速度を検出する相対速度検出手段と、前記入口付近検出手段が、前記車両が高速道路の入口付近に存在することを検出し、かつ、前記速度検出手段が、前記車両の速度が所定の速度以上であることを検出し、また、前記相対速度検出手段が、前記車両と前記先行車両との相対速度が徐々に減少していることを検出した時には、前記車両は高速道路上に存在すると判断する道路種別判断手段を備えたことを特徴とするものである。
また、前記相対速度検出手段は、前記車両から前記先行車両に光または電波を照射し、該照射波と前記先行車両から反射された反射波の周波数の差に基づいて前記車両と前記先行車両との相対速度を検出するドップラーレーダ装置であることを特徴とするものである。
また、前記車両に搭載され、前記先行車両を撮影する撮像手段と、前記撮像手段により撮影された撮影画像から前記先行車両を抽出する画像処理手段とを備え、前記相対速度検出手段は、前記画像処理手段により抽出された先行車両の撮影画像情報に基づいて、前記車両と前記先行車両との距離を検出し、検出された距離の時間的な変化量に基づいて前記車両と前記先行車両との相対速度を検出することを特徴とするものである。
また、車両周辺の大気圧を検出する大気圧検出手段と、前記大気圧検出手段により検出された大気圧情報を基に、前記車両の存在する地点の標高を求める第1の標高算出手段と、地図情報と車両位置情報に基づいて、前記車両の存在する地点の高速道路の標高と、一般道路の標高とをそれぞれ求める第2の標高算出手段と、前記第1の標高算出手段により求められた前記車両の存在する地点の標高が、前記第2の標高算出手段により求められた前記車両の存在する地点の高速道路の標高または一般道路の標高のいずれに近似するかに基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とするものである。
また、前記第1の標高算出手段は、予め大気圧と標高の関係を示すマップを基に前記車両の存在する地点の標高を求めることを特徴とするものである。
また、前記大気圧検出手段は、地図上の標高データと照合して校正されてなることを特徴とするものである。
また、前記大気圧検出手段は、標高の異なる2地点において地図上の標高データと照合して校正されてなることを特徴とするものである。
また、前記大気圧検出手段は、前記車両の走行速度に応じて補正されてなることを特徴とするものである。
また、車両周辺の大気圧を検出する大気圧検出手段と、前記車両が、高速道路の出入口付近に到達したことを検出する出入口付近検出手段と、前記出入口付近検出手段により前記車両が高速道路の出入口付近に到達したことを検出し、かつ、前記大気圧検出手段により短時間に所定値以上の圧力差を検出した時には、前記車両は高速道路から一般道路へ、または、一般道路から高速道路へ移動したと判断する移動判断手段を備えたことを特徴とするものである。
また、車両に搭載され、道路上または近傍に設置された道路標識を撮影する撮像手段と、前記撮像手段により撮影された撮影画像から道路標識を抽出する画像処理手段と、前記画像処理手段により抽出された高速道路固有の道路標識に基づいて、前記車両が高速道路上に存在すると判断する道路種別判断手段を備えたことを特徴とするものである。
また、前記画像処理手段は、制限速度を表示する速度標識から一般道路の最高速度を超える数字を抽出することを特徴とするものである。
また、前記画像処理手段は、インターチェンジまでの距離を表示する距離案内標識を抽出することを特徴とするものである。
また、前記画像処理手段は、サービスエリアまたはパーキングエリアの出入口を表示するサービスエリア案内標識を抽出することを特徴とするものである。
また、車両が、交差点または信号機設置位置に存在することを検出する交差点検出手段と、前記車両の走行速度を検出する速度検出手段と、前記交差点検出手段及び前記速度検出手段により前記車両が交差点または信号機設置位置を所定速度を超える速度で減速せずに、所定回数以上通過したことを検出した時には、前記車両は高速道路を走行していると判断する道路種別判断手段を備えたことを特徴とするものである。
また、車両が、交差点または信号機設置位置に存在することを検出する交差点検出手段と、前記車両が停止したことを検出する停止検出手段と、前記交差点検出手段及び前記停止検出手段により前記車両が交差点または信号機設置位置で停止したことを検出した時には、前記車両は一般道路を走行していると判断する道路種別判断手段を備えたことを特徴とするものである。
また、車両が、一般道路と高速道路が併走する併走区間に存在することを検出する併走区間検出手段と、前記併走区間検出手段により検出された併走区間において、前記車両が過去に走行した一般道路と高速道路のそれぞれの走行実績を記憶する走行実績記憶手段と、前記走行実績記憶手段に記憶された過去の走行実績に基づいて、前記車両が存在する道路を判断する道路種別判断手段を備えたことを特徴とするものである。
また、前記道路種別判断手段は、他の方法により、前記車両の走行している道路が高速道路か一般道路のいずれであるか判断できない時は、前記車両は、前記走行実績記憶手段に記憶された直近に走行した道路上に存在すると判断することを特徴とするものである。
また、前記道路種別判断手段は、他の方法により、前記車両の走行している道路が高速道路か一般道路のいずれであるか判断できない時は、前記車両は、前記走行実績記憶手段に記憶された道路種別毎の走行回数が多い方の道路上に存在すると判断することを特徴とするものである。
また、前記道路種別判断手段は、前記複数の道路種別判断結果に基づいて判断することを特徴とするものである。
本発明によれば、高速道路と一般道路が上下に併走している場合にも、自車両がいずれの道路上に存在するかを判断することが可能になる。
本発明の実施の形態に係る道路種別判断装置について、図面を参照して説明する。
図1は本発明の第1の実施例に係る道路種別判断装置の構成を示すブロック図である。図2は本発明の第1の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図3は撮影画像の説明図である。尚、本実施例は、カメラで道路上の白線を撮像し、画像処理して、白線の長さ、または間隔を算出した結果に基づいて道路種別(高速道路または一般道路)を特定するものである。
1は車両の位置を検出し、地図情報と照合して走行道路を特定し、地図上に車両位置を表示して車両の走行案内を行うナビゲーション部である。11はGPS衛星からの電波を受信して車両の位置を検出するGPS受信機である。12は地図情報の記録されたCD−ROMやDVD及びその駆動装置から構成された地図データベースである。13は車両の走行速度を検出する車速(距離)センサで、車両の速度計からの信号が用いられる。14は車両の方位を検出するジャイロ等の方位センサである。15は車両位置と地図情報とを照合して車両の走行道路を特定し、地図上に車両位置を表示して車両の走行案内を行う制御部で、マイクロコンピュータで構成される。16は地図及びその上に車両位置を表示する表示部で、液晶表示パネル及びその駆動回路で構成される。17は案内のための音声を出力する音声出力部である。18は運転者が各種入力や処理の実行を指示するための操作部で、押し釦スイッチやタッチパネルスイッチ等から構成される。
2は自車両の前方道路や他車両を撮影する撮像部である。21はCCDで構成されたカメラである。22はカメラ21で撮像された画像から白線や車両を認識し、寸法計測する画像処理部である。23は制御部15の指示によりカメラ21の撮影方向を変更するための駆動部で、モータ、カメラ固定台、ギヤ等で構成されている。
次に、道路種別(高速道路または一般道路)の特定処理について、図2のフローチャートを用いて説明する。
ステップS11では、道路上の白線を撮影してステップS12に移る。つまり、カメラ21により車両前方の路面を撮影し、撮影画像の中から図3ように白線を認識(抽出)する。ステップS12では、1本の白線の長さを算出してステップS13に移る。カメラ21は車両の決まった位置に取り付けられており、道路からの高さ、取り付け角度(俯角)を基に撮影画像から線長が算出できる。
ステップS13では、白線の長さL1が5mを超えているか否かを判断して、長さL1が5mを超えておればステップS14に移り、長さL1が5m以下であればステップS15に移る。高速道路の白線の長さL1は8m、一般道路の白線の長さL1は5mと決められており、白線の長さL1で高速道路か一般道路かを判断する。
ステップS14では、自車両は高速道路上に存在していると判断して処理を終える。ステップS15では、自車両は一般道路上に存在していると判断して処理を終える。
以上のように、本実施例の道路種別判断装置によれば、道路上の白線をカメラで撮影し、その白線の長さを基準長(5m)と比較することにより確実に道路種別が特定できる。
尚、本実施例では、道路上の白線をカメラで撮像し、その白線の長さL1を基準長(5m)と比較することにより道路種別を特定しているが、道路上の白線の間隔も規定されており、図3のように高速道路の白線の間隔L2は12m、一般道路の白線の間隔L2は5mと決められている。そこで、ステップS12で白線の長さL1の代わりに白線の間隔L2を算出し、また、ステップS13で白線の間隔L2を5mと比較して道路種別を特定するようにしてもよい。
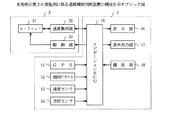
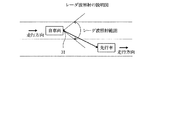
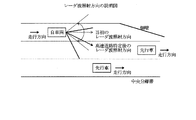
図4は本発明の第2の実施例に係る道路種別判断装置の構成を示すブロック図である。図5は本発明の第2の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図6はレーダ波照射の説明図である。図7は自車両と先行車両との速度差(相対速度)の説明図である。図8は画像処理による先行車両との速度差の説明図である。図9はレーダ波照射方向の説明図である。尚、本実施例は、高速道路の出入口付近において、先行車両にレーダ波を照射して自車両との速度差を測定し、速度差の推移に基づいて道路種別(高速道路または一般道路)を特定するものである。
3は自車両と先行車両(同一車線に限定しない)との速度差(相対速度)を検出するレーダ装置である。31は自車両の前方道路や先行車両に向けてレーダ波を照射し、その反射波を受信し、照射波と反射波の周波数の差を検出するドップラーレーダヘッドである。32はドップラーレーダヘッド31で検出した周波数差に基づいて自車両と先行車両の速度差を算出する速度算出部である。33は制御部15の指示によりドップラーレーダヘッド31の照射方向を変更するための駆動部で、モータ、ドップラーレーダヘッド固定台、ギヤ等で構成されている。尚、ナビゲーション部1の構成は第1の実施例と、構成、名称、機能及び作用が同じであるので同一番号を付し説明は省略する。
次に、道路種別(高速道路または一般道路)の特定処理について、図5のフローチャートを用いて説明する。
ステップS21では、自車両の位置を検出し、地図情報と照合して高速道路の出入口付近にあるか否かを判断し、出入口付近にあればステップS22に移り、出入口付近になければ処理を終える。つまり、GPS受信機11により車両の位置を検出する。そして、地図情報と照合する。
ステップS22では、自車両と先行車両との速度差を検出してステップS23に移る。つまり、図6に示すごとくドップラーレーダヘッド31から車両前方にレーダ波を照射し、その反射波を受信し、照射波と反射波の周波数の差を検出する。そして、検出した周波数差に基づいて速度差(先行車両の速度−自車両の速度)を算出する。
ステップS23では、自車両と先行車両との速度差がV1以上であるか否かを判断して速度差がV1以上であればステップS24に移り、速度差がV1未満であればステップS27に移る。図7のごとく、高速道路では、通常80〜100km/h程度の速度で車両が走行しているので、自車両が高速道路に進入する時には先行車両と大きな速度差が生じている。しかし、一般道路では、通常50km/h程度の速度で車両が走行しているので、自車両が一般道路に進入(または走行)する時には先行車両との速度差は小さい。この速度差に基づいて道路の判定を行う。速度差V1(概略自車両が高速道路に進入する時の速度差に対応)として、例えば、50km/hに設定される。
ステップS24では、自車両と先行車両との速度差を検出してステップS25に移る。つまり、刻々変化する速度差を継続して監視する。ステップS25では、自車両と先行車両との速度差がV2以上であるか否かを判断して速度差がV2以上であればステップS26に移り、速度差がV2未満であればステップS24に戻る。図7のごとく、自車両が高速道路に進入した時には先行車両と大きな速度差があっても加速するに従って徐々に速度差は少なくなる。この速度差に基づいて道路の判定を行う。速度差がV2として、例えば、20km/hに設定される。
ステップS26では、自車両は高速道路上に存在していると判断して処理を終える。ステップS27では、自車両は一般道路上に存在していると判断して処理を終える。
以上のように、本実施例の道路種別判断装置によれば、レーダ波を照射して自車両と先行車両の速度差を測定し、その速度差の推移に基づいて道路種別(高速道路または一般道路)が特定できる。
尚、本実施例では、先行車両にレーダ波を照射して自車両と先行車両の相対速度(速度差)を測定しているが、例えば、第1の実施例のように、カメラ21により撮影した先行車両の画像(図8参照)から先行車両の移動量の時間的な変化に基づく先行車両の速度と、自車両の速度から相対速度を測定するようにしてもよい。
また、ドップラーレーダヘッド31やカメラ21で自車両が高速道路に進入したと判断した場合には、レーダビームの照射方向やカメラの撮像方向を図9のように隣接車線側に振り、隣接車線を走行している車両を早期に認識するようにする。
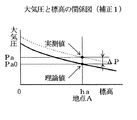
図10は本発明の第3の実施例に係る道路種別判断装置の構成を示すブロック図である。図11は本発明の第3の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図12は大気圧と標高の関係を示す関係図である。図13は大気圧と標高の関係を示す関係図(補正1)である。図14は大気圧と標高の関係を示す関係図(補正2)である。図15は大気圧と車両の速度の関係を示す関係図である。尚、本実施例は、大気圧センサで車両周辺に大気圧を検出し、検出した大気圧を基に車両の存在する地点(現在地点)の標高を算出する。そして、地図情報から読み出した車両の現在地点の標高と比較して、一致した方の道路上に自車両が存在すると判断するものである。
41は自車両の近傍の大気圧を検出する大気圧センサである。42はエンジンの燃料噴射制御を行うEFI−ECUである。尚、ナビゲーション部1の構成は第1の実施例と、構成、名称、機能及び作用が同じであるので同一番号を付し説明は省略する。
次に、道路種別(高速道路または一般道路)の特定処理について、図11のフローチャートを用いて説明する。
ステップS31では、自車両の位置を検出し、地図情報と照合してステップS32に移る。つまり、GPS受信機11により車両の位置を検出する。そして、地図上で位置を特定する。ステップS32では、特定した地点における地図上の高速道路の標高(h1)をナビゲーション部1から読み取りステップS33に移る。ステップS33では、特定した検出地点における地図上の一般道路の標高(h2)をナビゲーション部1から読み取りステップS34に移る。
ステップS34では、EFI−ECU42から大気圧データを取得してステップS35に移る。ステップS35では、取得した大気圧に対応する標高(h3)を算出してステップS36に移る。つまり、図12のごとく、大気圧と標高の関係図(理論値)から大気圧に対応する標高(h3)を算出する。
ステップS36では、高速道路と一般道路のいずれの標高が大気圧に対応する標高(h3)と一致しているかを判断して高速道路の標高と一致しておればステップS37に移り、一般道路の標高と一致しておればステップS38に移る。つまり、図12のごとく、大気圧に対応する標高(h3)が地図上の高速道路の標高(h1)または地図上の一般道路の標高(h2)のいずれと一致(またはいずれに近似)するかを判断する。
ステップS37では、自車両は高速道路上に存在していると判断して処理を終える。ステップS38では、自車両は一般道路上に存在していると判断して処理を終える。
以上のように、本実施例の道路種別判断装置によれば、標高の異なる2つの道路では大気圧が異なることを利用して道路種別(高速道路または一般道路)が特定できる。
尚、基準となる標高0m地点の大気圧は天候等により変動するので、これを補正する必要がある。そこで、図13のごとく、走行中に任意の地点Aにおいて、位置検出、大気圧検出を行い、ナビゲーション部1の地図情報から地点Aにおける標高(ha)情報を取得し、その標高における理論的な大気圧(Pa0)を算出する。そして、検出した大気圧(実測値Pa)と算出した大気圧(理論値Pa0)を比較してΔPだけ補正する。
更に、大気圧センサ自身の感度を補正するためには、図14のごとく、走行中に標高差の大きく異なる2地点A、Bにおいて、位置検出、大気圧検出を行い、ナビゲーション部1の地図情報から2地点A、Bにおける標高(ha)、(hb)情報を取得し、その標高における理論的な大気圧(Pa0、Pb0)を算出する。そして、検出した大気圧(実測値Pa、Pb)と共にグラフにして、2地点の補正量ΔPa、ΔPbを基に内挿して広範囲の補正を行う。また、時間的な大気圧の変動を補正するために所定時間経過する毎に、または所定距離走行毎に同様の処理を行い補正値ΔPを更新する。また、車両の走行速度により大気圧が変動するのを補正するためには、図15のごとく、予め、水平道路で走行速度Vと大気圧Pの関係を取得しグラフにする。このグラフを利用して、速度に対応する大気圧P0を補正する。
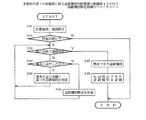
図16は本発明の第4の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。尚、本実施例は、高速道路の出入口付近において、大気圧センサで車両周辺に大気圧を検出し、検出した大気圧を標高に変換し、標高の急激な変化を検出すると車両が高速道路から一般道路へ、または一般道路から高速道路へ移動したと判断するものである。尚、構成は第3の実施例の構成と同じであるので説明は省略する。
次に、道路種別(高速道路または一般道路)の特定処理について、図16のフローチャートを用いて説明する。
ステップS41では、自車両の位置を検出し、地図情報と照合してステップS42に移る。つまり、GPS受信機11により車両の位置を検出する。そして、地図上で位置を特定する。ステップS42では、地図情報と照合し、現在位置が地図上で高速道路と一般道路が併走している区間であるか否かを判断し、高速道路と一般道路が併走している区間であればステップS43に移り、高速道路と一般道路が併走している区間でなければ処理を終える。つまり、併走区間でなければ平面地図上で位置が異なるので走行している道路が特定でき、本例の判定処理を行う必要はない。ステップS43では、地図情報と照合し、現在位置が地図上の高速道路の出入口付近にあるか否かを判断し、出入口付近にあればステップS44に移り、出入口付近になければ処理を終える。
ステップS44では、大気圧データを取得してステップS45に移る。つまり、EFI−ECU42から大気圧情報を取得する。ステップS45では、大気圧に対応する標高を算出し、記憶してステップS46に移る。つまり、図12を利用して大気圧に対応する標高(h1)を求める。尚、本例では、2道路の標高差ΔHを求めるので詳細な補正をする必要はない。ステップS46では、標高差ΔHが所定値hを超えたか否かを判断して標高差が所定値を超えるとステップS47に移り、標高差が所定値を超えなければ処理を終える。つまり、前回の標高(h2)との標高差ΔH(絶対値)を所定値h(2道路の高低差で、例えば、10m)と比較する。
ステップS47では、道路の種別が変更になったと判断する。つまり、高速道路の出入口付近において、標高の急激な変化を検出したので、車両が高速道路から一般道路へ、または一般道路から高速道路へ移動したと判断する
ステップS48では、標高差ΔHがプラスか否かを判断して標高差ΔHがプラスならばステップS49に移り、標高差ΔHがマイナスならばステップS50に移る。通常、高速道路が一般道路の上部に建設されているので、高速道路の方が標高が高い。そこで、標高差ΔHがプラス(上昇)かマイナス(下降)かを検出すれば車両が上下いずれの方向に移動したかが判断できる。
ステップS48では、標高差ΔHがプラスか否かを判断して標高差ΔHがプラスならばステップS49に移り、標高差ΔHがマイナスならばステップS50に移る。通常、高速道路が一般道路の上部に建設されているので、高速道路の方が標高が高い。そこで、標高差ΔHがプラス(上昇)かマイナス(下降)かを検出すれば車両が上下いずれの方向に移動したかが判断できる。
ステップS49では、車両は一般道路から高速道路へ移動したと判断して処理を終える。つまり、車両はこれより高速道路を走行することとなる。ステップS50では、車両は高速道路から一般道路へ移動したと判断して処理を終える。つまり、車両はこれより一般道路を走行することとなる。
尚、ステップS48において、高速道路が一般道路の上部に建設されていることが多いが、稀に逆の場合もあるので、地図上でいずれの道路の方が標高が高いかを確認するステップを追加してもよい。もし、逆の場合はステップS49、ステップS50の判断及び処理を逆にする。
以上のように、本実施例の道路種別判断装置によれば、標高の異なる2つの道路の大気圧が異なることを利用して道路種別(高速道路または一般道路)が特定できる。
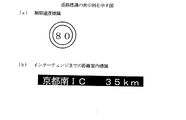
図17は本発明の第5の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図18は道路標識の表示例を示す図で、(a)は速度標識、(b)はインターチェンジまでの距離標識である。
尚、本実施例は、道路上または路側に設置された案内標識(例えば、制限速度標識、インターチェンジまでの距離案内標識等)をカメラで撮影し、画像処理して高速道路固有の情報を検出し、検出した情報を基に車両が高速道路上に存在すると判断するものである。尚、構成はナビゲーション部1の構成と同じであるので説明は省略する。
次に、道路種別(高速道路または一般道路)の特定処理について、図17のフローチャートを用いて説明する。
ステップS51では、カメラで路側に設置され、その道路の制限速度情報を表示する制限速度標識を撮影してステップS52に移る。ステップS52では、画像処理して制限速度標識を抽出してステップS53に移る。つまり、図18(a)に示すような円形の標識に含まれる80、100等の制限速度を表す数字を抽出する。ステップS53では、制限速度情報が70km/h以上であるか否かを判断して制限速度情報が70km/h以上であればステップS54の移り、制限速度情報が70km/h未満であればステップS55に移る。
ステップS54では、自車両は高速道路上に存在していると判断して処理を終える。つまり、一般道路の最高速度は道路の状態に係わらず最高60km/hであるので受信した制限速度情報が70km/h以上であれば高速道路上に存在していると判断できる。ステップS55では、自車両の存在している道路の特定判断を保留して処理を終える。つまり、一般道路の最高速度は道路の状態に係わらず最高60km/hであるが、高速道路でもカーブ地点等の危険個所は70km/h未満の速度が設定されていることもあり、道路種別の判断を保留する。つまり、制限速度情報が70km/h以上である情報を取得するまで上記の処理を繰り返す。
以上のように、本実施例の道路種別判断装置によれば、道路に設置された制限速度を表示する制限速度標識を撮影して画像処理し、速度情報が所定速度以上であれば高速道路であると判断できる。
尚、本実施例では、制限速度情報を受信して高速道路であると判断しているが、高速道路特有の標識、例えば、インターチェンジまでの距離案内標識やパーキングエリア、サービスエリア等の案内標識(PA、SA)を認識して、例えば、図18(b)に示すような緑色の四角の横長標識に地名、距離表示があれば高速道路であると判断するようにしてもよい。
図19は本発明の第6の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図20は車両の走行状態と交差点の関係を説明する説明図である。尚、本実施例は、所定数の交差点または信号機の設置個所を高速で、減速せずに通過できたか、または停止したかに基づいて走行道路を特定するものである。尚、構成はナビゲーション部1の構成と同じであるので説明は省略する。
次に、道路種別(高速道路または一般道路)の特定処理について、図19のフローチャートを用いて説明する。ステップS61では、車速を検出してステップS62に移る。ステップS62では、車速が50km/h以上であるか否かを判断して車速が50km/h以上であればステップS63に移り、車速が50km/h未満であればステップS61に戻る。
ステップS63では、現在位置を検出し、地図データと照合してステップS64に移る。つまり、GPS受信機11により車両の位置を検出する。そして、地図データ上で車両の位置を特定する。ステップS64では、特定した地点が地図データ上の交差点または信号機の設置された位置(以降、単に交差点と称する)であるか否かを判断して、交差点位置であればステップS65に移り、交差点位置でなければステップS61に戻る。つまり、図20の交差点(X1〜X5のいずれか)に車両がいるか(停止中または、通過中)を判断する。
ステップS65では、減速したか否かを判断して、減速すればステップS69に移り、減速しなければステップS66に移る。つまり、図20の交差点(X1〜X5のいずれか)で信号に従って停止するために、または交差する道路の走行車両に注意するために徐行しているかを判断する。
ステップS66では、カウンタを1アップしてステップS67に移る。つまり、一般道路でも図20の交差点(例えば、X1)を高速で、減速せずに通過できることがあり、高速道路とは断定できない。そこで、連続して通過できたことを確認するためにカウントを開始する。ステップS67では、カウントが所定数n(例えば、5)を超えたか否かを判断して、所定数nを超えればステップS68に移り、所定数nを超えなければステップS61に戻る。これは車両が連続してn個所の交差点を高速で、しかも減速せずに通過できたかを判断するものである。
ステップS68では、車両は高速道路を走行していると判断して処理を終える。つまり、車両が連続してn個所の交差点を高速で、しかも減速せずに通過できたので、車両は高速道路を走行していると判断できる。
ステップS69では、車両が停止したか否かを判断して、停止すればステップS70に移り、停止しなければステップS71に移る。ステップS70では、車両は一般道路を走行していると判断して処理を終える。つまり、車両が交差点の位置で停止したので一般道路を走行していると判断できる。
ステップS71では、カウンタをリセットしてステップS61に戻る。つまり、連続して交差点を高速で通過できなかったので、カウンタをリセットして0からカウントを開始する。この時点では道路種別の特定はできず保留となる。
以上のように、本実施例の道路種別判断装置によれば、所定数の交差点または信号機の設置個所を高速で、減速せずに通過できたか、または停止したかに基づいて走行道路を特定することができる。
図21は本発明の第7の実施例に係る道路種別判断装置の制御部15の行う道路種別特定処理のフローチャートである。図22は併走区間を説明する説明図である。尚、本実施例は、高速道路と一般道路が併走している区間において、過去の走行実績に基づいて、今回の走行道路を特定するものである。尚、構成はナビゲーション部1の構成と同じであるので説明は省略する。
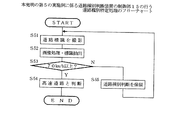
次に、道路種別(高速道路または一般道路)の特定処理について、図21のフローチャートを用いて説明する。
ステップS81では、現在位置を検出し地図データと照合してステップS82に移る。つまり、GPS受信機11により車両の位置を検出する。ステップS82では、現在位置が地図データ上で高速道路と一般道路が併走している区間であるか否かを判断し、高速道路と一般道路が併走している区間であればステップS83に移り、高速道路と一般道路が併走している区間でなければ処理を終える。併走区間でなければ平面地図上で高速道路と一般道路の位置が異なるので車両がいずれの道路を走行しているかが判る。従って、以下の判定処理を行う必要はない。
ステップS83では、他の方法で道路種別が特定できたか否かを判断して、道路種別が特定できればステップS87に移り、道路種別が特定できなければステップS84に移る。つまり、前述した実施例1〜6の方法で道路種別が特定できたか否かを判断する。
ステップS84では、過去にその区間を走行したか否かを判断して過去に走行した実績があればステップS85に移り、過去に走行した実績がなければステップS86に移る。この判断は予め併走区間毎に走行した実績を記録したデータ(ステップS88で記録したデータ)に基づいて行う。
ステップS85では、過去の走行実績に基づいて道路種別を特定してステップS83に戻る。例えば、前回の走行実績が高速道路であれば今回も高速道路を走行していると判断する。また、過去の両道路の走行実績を比較して、多い方の道路を今回も走行していると判断する。尚、他の方法で道路種別が特定できれば、その方が信頼性が高いと思われる。そこで、この判断はそれまでの暫定的な判断としてステップS83に戻る。
ステップS86では、道路種別の特定を保留してステップS83に戻る。つまり、過去に走行した実績がないので、他の方法で道路種別が特定できるまで判断を保留してステップS83に戻る。
ステップS87では、他の方法で特定できた道路種別としてステップS88に移る。つまり、前述した実施例1〜6の方法で道路種別が特定できた道路にいると判断する。
ステップS88では、毎回特定できた道路種別を記録して処理を終える。将来この道路を再度走行した場合の判断データとするために、併走区間と各道路の走行回数(カウントアップ)をメモリに記録する。
以上のように、本実施例の道路種別判断装置によれば、高速道路と一般道路が併走している区間において、過去の走行実績に基づいて、今回の走行道路を特定することができる。
尚、上記実施例1〜7のいずれか1つの方法で道路種別を特定するのではなく、複数の方法を用いて道路種別を特定し、その結果を総合的に判断するようにすれば一層信頼性が向上できる。
1・・・・ナビゲーション部
11・・・GPS受信機
12・・・地図データベース
13・・・車速センサ
14・・・方位センサ
15・・・制御部
16・・・表示部
17・・・音声出力部
18・・・操作部
20・・・撮像部
21・・・カメラ
22・・・画像処理部
23、33・・・駆動部
3・・・・レーダ装置
31・・・ドップラーレーダヘッド
32・・・速度算出部
41・・・大気圧センサ
42・・・EFI−ECU
11・・・GPS受信機
12・・・地図データベース
13・・・車速センサ
14・・・方位センサ
15・・・制御部
16・・・表示部
17・・・音声出力部
18・・・操作部
20・・・撮像部
21・・・カメラ
22・・・画像処理部
23、33・・・駆動部
3・・・・レーダ装置
31・・・ドップラーレーダヘッド
32・・・速度算出部
41・・・大気圧センサ
42・・・EFI−ECU
Claims (21)
- 車両に搭載され、路面に描かれた走行車線を区切る白線を撮影する撮像手段と、
前記撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、
前記画像処理手段により抽出された白線の長さに基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 車両に搭載され、路面に描かれた走行車線を区切る白線を撮像する撮像手段と、
前記撮像手段により撮影された撮影画像から白線を抽出する画像処理手段と、
前記画像処理手段により抽出された白線の間隔に基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 車両が、高速道路の入口付近に存在することを検出する入口付近検出手段と、
前記車両の走行速度を検出する速度検出手段と、
前記車両と該車両の前方を走行する先行車両との相対速度を検出する相対速度検出手段と、
前記入口付近検出手段が、前記車両が高速道路の入口付近に存在することを検出し、かつ、前記速度検出手段が、前記車両の速度が所定の速度以上であることを検出し、また、前記相対速度検出手段が、前記車両と前記先行車両との相対速度が徐々に減少していることを検出した時には、前記車両は高速道路上に存在すると判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 前記相対速度検出手段は、
前記車両から前記先行車両に光または電波を照射し、該照射波と前記先行車両から反射された反射波の周波数の差に基づいて前記車両と前記先行車両との相対速度を検出するドップラーレーダ装置であることを特徴とする請求項3記載の道路種別判断装置。 - 前記車両に搭載され、前記先行車両を撮影する撮像手段と、
前記撮像手段により撮影された撮影画像から前記先行車両を抽出する画像処理手段とを備え、
前記相対速度検出手段は、
前記画像処理手段により抽出された先行車両の撮影画像情報に基づいて、前記車両と前記先行車両との距離を検出し、検出された距離の時間的な変化量に基づいて前記車両と前記先行車両との相対速度を検出することを特徴とする請求項3記載の道路種別判断装置。 - 車両周辺の大気圧を検出する大気圧検出手段と、
前記大気圧検出手段により検出された大気圧情報を基に、前記車両の存在する地点の標高を求める第1の標高算出手段と、
地図情報と車両位置情報に基づいて、前記車両の存在する地点の高速道路の標高と、一般道路の標高とをそれぞれ求める第2の標高算出手段と、
前記第1の標高算出手段により求められた前記車両の存在する地点の標高が、前記第2の標高算出手段により求められた前記車両の存在する地点の高速道路の標高または一般道路の標高のいずれに近似するかに基づいて、前記車両が走行している道路が高速道路か一般道路のいずれであるかを判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 前記第1の標高算出手段は、
予め大気圧と標高の関係を示すマップを基に前記車両の存在する地点の標高を求めることを特徴とする請求項6記載の道路種別判断装置。 - 前記大気圧検出手段は、
地図上の標高データと照合して校正されてなることを特徴とする請求項6記載の道路種別判断装置。 - 前記大気圧検出手段は、
標高の異なる2地点において地図上の標高データと照合して校正されてなることを特徴とする請求項6記載の道路種別判断装置。 - 前記大気圧検出手段は、
前記車両の走行速度に応じて補正されてなることを特徴とする請求項6記載の道路種別判断装置。 - 車両周辺の大気圧を検出する大気圧検出手段と、
前記車両が、高速道路の出入口付近に到達したことを検出する出入口付近検出手段と、
前記出入口付近検出手段により前記車両が高速道路の出入口付近に到達したことを検出し、かつ、前記大気圧検出手段により短時間に所定値以上の圧力差を検出した時には、前記車両は高速道路から一般道路へ、または、一般道路から高速道路へ移動したと判断する移動判断手段を備えたことを特徴とする道路種別判断装置。 - 車両に搭載され、道路上または近傍に設置された道路標識を撮影する撮像手段と、
前記撮像手段により撮影された撮影画像から道路標識を抽出する画像処理手段と、
前記画像処理手段により抽出された高速道路固有の道路標識に基づいて、前記車両が高速道路上に存在すると判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 前記画像処理手段は、
制限速度を表示する速度標識から一般道路の最高速度を超える数字を抽出することを特徴とする請求項12記載の道路種別判断装置。 - 前記画像処理手段は、
インターチェンジまでの距離を表示する距離案内標識を抽出することを特徴とする請求項12記載の道路種別判断装置。 - 前記画像処理手段は、
サービスエリアまたはパーキングエリアの出入口を表示するサービスエリア案内標識を抽出することを特徴とする請求項12記載の道路種別判断装置。 - 車両が、交差点または信号機設置位置に存在することを検出する交差点検出手段と、
前記車両の走行速度を検出する速度検出手段と、
前記交差点検出手段及び前記速度検出手段により前記車両が交差点または信号機設置位置を所定速度を超える速度で減速せずに、所定回数以上通過したことを検出した時には、前記車両は高速道路を走行していると判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 車両が、交差点または信号機設置位置に存在することを検出する交差点検出手段と、
前記車両が停止したことを検出する停止検出手段と、
前記交差点検出手段及び前記停止検出手段により前記車両が交差点または信号機設置位置で停止したことを検出した時には、前記車両は一般道路を走行していると判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 車両が、一般道路と高速道路が併走する併走区間に存在することを検出する併走区間検出手段と、
前記併走区間検出手段により検出された併走区間において、前記車両が過去に走行した一般道路と高速道路のそれぞれの走行実績を記憶する走行実績記憶手段と、
前記走行実績記憶手段に記憶された過去の走行実績に基づいて、前記車両が存在する道路を判断する道路種別判断手段を備えたことを特徴とする道路種別判断装置。 - 前記道路種別判断手段は、
他の方法により、前記車両の走行している道路が高速道路か一般道路のいずれであるか判断できない時は、前記車両は、前記走行実績記憶手段に記憶された直近に走行した道路上に存在すると判断することを特徴とする請求項18記載の道路種別判断装置。 - 前記道路種別判断手段は、
他の方法により、前記車両の走行している道路が高速道路か一般道路のいずれであるか判断できない時は、前記車両は、前記走行実績記憶手段に記憶された道路種別毎の走行回数が多い方の道路上に存在すると判断することを特徴とする請求項18記載の道路種別判断装置。 - 前記道路種別判断手段は、
前記複数の道路種別判断結果に基づいて判断することを特徴とする請求項1〜請求項10または請求項12〜請求項20記載の道路種別判断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003348720A JP2005114535A (ja) | 2003-10-07 | 2003-10-07 | 道路種別判断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003348720A JP2005114535A (ja) | 2003-10-07 | 2003-10-07 | 道路種別判断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005114535A true JP2005114535A (ja) | 2005-04-28 |
| JP2005114535A5 JP2005114535A5 (ja) | 2006-11-16 |
Family
ID=34540830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003348720A Pending JP2005114535A (ja) | 2003-10-07 | 2003-10-07 | 道路種別判断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005114535A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007093393A (ja) * | 2005-09-29 | 2007-04-12 | Pioneer Electronic Corp | ナビゲーション装置、その方法、そのプログラム及びその記録媒体 |
| JP2009008589A (ja) * | 2007-06-29 | 2009-01-15 | Aisin Aw Co Ltd | 自車位置認識装置及び自車位置認識プログラム |
| JP2009074888A (ja) * | 2007-09-20 | 2009-04-09 | Alpine Electronics Inc | 車間距離計測装置 |
| WO2010116481A1 (ja) * | 2009-04-06 | 2010-10-14 | パイオニア株式会社 | 燃費推定装置、燃費推定方法、燃費推定プログラムおよび記録媒体 |
| JP2011118828A (ja) * | 2009-12-07 | 2011-06-16 | Toyota Motor Corp | 車線逸脱防止支援装置 |
| JP2011122936A (ja) * | 2009-12-10 | 2011-06-23 | Aisin Aw Co Ltd | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム |
| EP2009398A3 (en) * | 2007-06-29 | 2011-12-14 | Aisin AW Co., Ltd. | Vehicle-position-recognition apparatus and vehicle-position-recognition program |
| JP2013145177A (ja) * | 2012-01-13 | 2013-07-25 | Cellstar Kogyo Kk | 道路交通情報受信装置 |
| JP2014001944A (ja) * | 2012-06-15 | 2014-01-09 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2014186651A (ja) * | 2013-03-25 | 2014-10-02 | Zenrin Datacom Co Ltd | 情報処理装置、情報処理方法およびプログラム |
| KR101480959B1 (ko) | 2013-12-13 | 2015-01-09 | 도로교통공단 | 주행형 노면표시 검사시스템 |
| JP2017049206A (ja) * | 2015-09-04 | 2017-03-09 | 株式会社デンソー | 高速道路判定装置 |
| KR101731789B1 (ko) * | 2015-11-16 | 2017-05-04 | (주)캠시스 | 도로 인식을 이용한 지능형 운전자 보조 시스템의 제어 방법 및 시스템 |
| JP2018045683A (ja) * | 2016-09-16 | 2018-03-22 | シーメンス エス.ア.エス.Siemens S.A.S. | 車両用の運転支援システムおよび運転支援方法 |
| US9952051B2 (en) | 2015-06-30 | 2018-04-24 | Lg Electronics Inc. | Advanced driver assistance apparatus, display apparatus for vehicle and vehicle |
| WO2019216386A1 (ja) * | 2018-05-10 | 2019-11-14 | 本田技研工業株式会社 | 車両制御装置および車両 |
| US11082511B2 (en) | 2016-12-21 | 2021-08-03 | Allstate Solutions Private Limited | Highway detection system for generating customized notifications |
| CN116704466A (zh) * | 2023-06-29 | 2023-09-05 | 北京汇通天下物联科技有限公司 | 车辆位置识别方法、装置、计算机设备及存储介质 |
-
2003
- 2003-10-07 JP JP2003348720A patent/JP2005114535A/ja active Pending
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007093393A (ja) * | 2005-09-29 | 2007-04-12 | Pioneer Electronic Corp | ナビゲーション装置、その方法、そのプログラム及びその記録媒体 |
| US8825364B2 (en) | 2007-06-29 | 2014-09-02 | Aisin Aw Co., Ltd. | Vehicle position recognition device and vehicle position recognition program |
| JP2009008589A (ja) * | 2007-06-29 | 2009-01-15 | Aisin Aw Co Ltd | 自車位置認識装置及び自車位置認識プログラム |
| US8155873B2 (en) | 2007-06-29 | 2012-04-10 | Aisin Aw Co., Ltd. | Vehicle-position-recognition apparatuses, methods, and programs |
| EP2009398A3 (en) * | 2007-06-29 | 2011-12-14 | Aisin AW Co., Ltd. | Vehicle-position-recognition apparatus and vehicle-position-recognition program |
| JP2009074888A (ja) * | 2007-09-20 | 2009-04-09 | Alpine Electronics Inc | 車間距離計測装置 |
| WO2010116481A1 (ja) * | 2009-04-06 | 2010-10-14 | パイオニア株式会社 | 燃費推定装置、燃費推定方法、燃費推定プログラムおよび記録媒体 |
| JPWO2010116481A1 (ja) * | 2009-04-06 | 2012-10-11 | パイオニア株式会社 | 燃費推定装置、燃費推定方法、燃費推定プログラムおよび記録媒体 |
| JP2011118828A (ja) * | 2009-12-07 | 2011-06-16 | Toyota Motor Corp | 車線逸脱防止支援装置 |
| JP2011122936A (ja) * | 2009-12-10 | 2011-06-23 | Aisin Aw Co Ltd | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム |
| US8504293B2 (en) | 2009-12-10 | 2013-08-06 | Aisin Aw Co., Ltd. | Travel guiding apparatus for vehicle, travel guiding method for vehicle, and computer-readable storage medium |
| JP2013145177A (ja) * | 2012-01-13 | 2013-07-25 | Cellstar Kogyo Kk | 道路交通情報受信装置 |
| JP2014001944A (ja) * | 2012-06-15 | 2014-01-09 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2014186651A (ja) * | 2013-03-25 | 2014-10-02 | Zenrin Datacom Co Ltd | 情報処理装置、情報処理方法およびプログラム |
| KR101480959B1 (ko) | 2013-12-13 | 2015-01-09 | 도로교통공단 | 주행형 노면표시 검사시스템 |
| KR101843773B1 (ko) * | 2015-06-30 | 2018-05-14 | 엘지전자 주식회사 | 차량 운전 보조 장치, 차량용 디스플레이 장치 및 차량 |
| US9952051B2 (en) | 2015-06-30 | 2018-04-24 | Lg Electronics Inc. | Advanced driver assistance apparatus, display apparatus for vehicle and vehicle |
| JP2017049206A (ja) * | 2015-09-04 | 2017-03-09 | 株式会社デンソー | 高速道路判定装置 |
| KR101731789B1 (ko) * | 2015-11-16 | 2017-05-04 | (주)캠시스 | 도로 인식을 이용한 지능형 운전자 보조 시스템의 제어 방법 및 시스템 |
| JP2018045683A (ja) * | 2016-09-16 | 2018-03-22 | シーメンス エス.ア.エス.Siemens S.A.S. | 車両用の運転支援システムおよび運転支援方法 |
| US11930089B2 (en) | 2016-12-21 | 2024-03-12 | Allstate Solutions Private Limited | Highway detection system for generating customized notifications |
| US11553057B2 (en) | 2016-12-21 | 2023-01-10 | Allstate Solutions Private Limited | Highway detection system for generating customized notifications |
| US11082511B2 (en) | 2016-12-21 | 2021-08-03 | Allstate Solutions Private Limited | Highway detection system for generating customized notifications |
| JP7153717B2 (ja) | 2018-05-10 | 2022-10-14 | 本田技研工業株式会社 | 車両制御装置および車両 |
| JPWO2019216386A1 (ja) * | 2018-05-10 | 2021-05-13 | 本田技研工業株式会社 | 車両制御装置および車両 |
| WO2019216386A1 (ja) * | 2018-05-10 | 2019-11-14 | 本田技研工業株式会社 | 車両制御装置および車両 |
| CN116704466A (zh) * | 2023-06-29 | 2023-09-05 | 北京汇通天下物联科技有限公司 | 车辆位置识别方法、装置、计算机设备及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005114535A (ja) | 道路種別判断装置 | |
| JP4915739B2 (ja) | 運転支援装置 | |
| JP4859760B2 (ja) | カーナビゲーション装置、道路標識認識方法およびプログラム | |
| US10145692B2 (en) | Vehicle position determination apparatus and vehicle position determination method | |
| US8005615B2 (en) | Navigation system | |
| US8600655B2 (en) | Road marking recognition system | |
| US10414396B2 (en) | Lane division line recognition apparatus, lane division line recognition method, driving assist apparatus including lane division line recognition apparatus, and driving assist method including lane division line recognition method | |
| JP6399100B2 (ja) | 走行経路演算装置 | |
| US20110144907A1 (en) | Travel guiding apparatus for vehicle, travel guiding method for vehicle, and computer-readable storage medium | |
| US20070106459A1 (en) | Route navigation systems, methods and programs | |
| JP2009031196A (ja) | 情報通知システム及びプログラム | |
| JP2017140981A (ja) | 車両用装置 | |
| JP2017073008A (ja) | 車両用運転支援システムおよび運転支援方法 | |
| JP2003279363A (ja) | 車載用ナビゲーション装置 | |
| TWI807548B (zh) | 利用重覆特徵物件進行車輛定位的方法及系統、電腦可讀取的記錄媒體 | |
| JPH08285534A (ja) | 車載用画像処理装置 | |
| JP6419011B2 (ja) | 地物画像認識システム、地物画像認識方法及びコンピュータプログラム | |
| CA3008416C (en) | Road information detection device, driving assistance device, road information detection system, road information detection method, driving control method and program | |
| JP2007183846A (ja) | 車両用標識認識装置および車両制御装置 | |
| JP2008032557A (ja) | 車載用ナビゲーション装置及び道路種判別方法 | |
| JP2011232271A (ja) | ナビゲーション装置、車載センサの精度推定方法、および、プログラム | |
| JP5712847B2 (ja) | 信号機増減検出システム、信号機増減検出装置、信号機増減検出方法及びコンピュータプログラム | |
| JP2003227725A (ja) | 車載ナビゲーションシステム及びナビゲーション方法並びにナビゲーション用プログラム | |
| JP2009009368A (ja) | 路面標示認識システム | |
| JP4826393B2 (ja) | 経路案内システム及び経路案内方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061003 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090519 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090929 |