JP2005012009A - Substrate holder, stage apparatus, and exposure apparatus - Google Patents
Substrate holder, stage apparatus, and exposure apparatus Download PDFInfo
- Publication number
- JP2005012009A JP2005012009A JP2003174934A JP2003174934A JP2005012009A JP 2005012009 A JP2005012009 A JP 2005012009A JP 2003174934 A JP2003174934 A JP 2003174934A JP 2003174934 A JP2003174934 A JP 2003174934A JP 2005012009 A JP2005012009 A JP 2005012009A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- holding
- rib
- stage
- substrate holder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
Description
【0001】
【発明の属する技術分野】
本発明は、基板を保持する基板保持装置、ステージ装置及び露光装置に関するものである。
【0002】
【従来の技術】
半導体デバイスや液晶表示デバイス等のマイクロデバイスはマスク上に形成されたパターンを感光性の基板上に転写するいわゆるフォトリソグラフィの手法により製造される。このフォトリソグラフィ工程で使用される露光装置は、マスクをマスクホルダを介して支持するマスクステージと基板を基板ホルダを介して支持する基板ステージとを有し、マスク上に形成されたパターンをマスクステージ及び基板ステージを逐次移動しながら投影光学系を介して基板に転写するものである。露光装置では、スループットの向上やパターン転写精度の向上等を図るために、マスクステージ及び基板ステージの移動時の高速化・高加速度化及び位置決め精度の向上等が求められ、これを実現するためにステージの軽量化が求められている。下記特許文献1には、マスクステージ(マスクホルダ)の表面側、裏面側、あるいは内部に穴を設けて軽量化を図る技術が開示されている。
【0003】
【特許文献1】
特許第3000361号公報
【0004】
【発明が解決しようとする課題】
ところで、マスクホルダはマスクの端部を保持する構成であり、上記特許文献1に開示されている技術を基板ホルダに適用することは困難である。すなわち、デバイスパターンのより一層の高集積化に対応するために投影光学系の更なる高解像度化が望まれているが、投影光学系の解像度は、投影光学系の開口数が大きいほど高くなる。一方で、開口数を大きくすると焦点深度が狭くなる。そのため、基板ホルダは基板を極めて高い平坦度で保持する必要がある。ところが、上記特許文献1の技術を基板ホルダに適用すると、基板ホルダに過度の穴が形成されることになり、高い(良好な)平坦度で基板を保持できなくなる可能性がある。また、基板ホルダの保持面自体の平坦度を向上するために、この基板ホルダの保持面に対して研磨処理を行う場合があるが、基板ホルダに過度の穴が設けられていたり薄肉化されていると、研磨処理時において基板ホルダが撓み、十分な平坦度を得られなくなるという可能性もある。また、基板ホルダでは基板を保持するため主に真空吸着方式が採用されるが、過度に穴が設けられていると、真空吸着孔及びこれに接続する流路の形成が困難となる。
【0005】
本発明はこのような事情に鑑みてなされたもので、軽量化が実現され、基板を高い平坦度で保持可能な基板保持装置、この基板保持装置を備えたステージ装置及び露光装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
上記の課題を解決するため本発明は、実施の形態に示す図1〜図10に対応付けした以下の構成を採用している。
本発明の基板保持装置(PH)は、基板(P)を保持する基板保持装置において、基板(P)を保持する保持面(2、7A、8A)を有する本体部(1)を備え、本体部(1)のうち保持面(2、7A、8A)とは反対側の面(3)に凹部(4)を形成するとともに、凹部(4)にリブ部(5)を設けたことを特徴とする。
本発明によれば、基板を保持可能な本体部のうち、基板を保持する保持面とは反対側の面に凹部を形成したことにより、軽量化を実現することができる。そして、この凹部にリブ部を設けたことにより、保持面の強度が維持され、基板の高い(良好な)平坦度を維持しつつ保持できる。また、リブ部により強度が維持されているので、保持面を研磨処理した場合でも保持面の撓みの発生が抑制され、保持面自体の平坦度を向上することができる。また、基板を真空吸着方式で保持する場合、吸着孔及びこれに接続される流路をリブ部に設けることで、強度を維持しつつ容易に流路を形成することができる。
【0007】
本発明のステージ装置(PST)は、基板(P)を保持する基板保持装置を支持して移動可能なステージ装置において、基板保持装置は、上記記載の基板保持装置(PH)により構成されていることを特徴とする。
本発明の露光装置(EX)は、基板ステージ上に保持された基板(P)にパターンを露光する露光装置において、基板ステージは、上記記載のステージ装置(PST)により構成されていることを特徴とする。
本発明によれば、軽量化が実現され、基板を平坦度良く保持可能な基板保持装置を介して基板を保持しているので、高い位置決め精度を維持しつつステージ装置の移動の高速化・高加速度化を実現することができる。また、基板を平坦度良く保持できるので、投影光学系の開口数が大きくなって焦点深度が狭くなっても、基板表面(露光処理面)を焦点深度内に良好に収めることができる。したがって、高いパターン転写精度でマスクのパターンを基板に露光できる。
【0008】
【発明の実施の形態】
以下、本発明の基板保持装置、ステージ装置及び露光装置について図面を参照しながら説明する。図1は本発明の基板保持装置(基板ホルダ)を介して基板を保持するステージ装置を備えた露光装置の一実施形態を示す概略構成図である。
図1において、露光装置EXは、マスクMを支持するマスクステージMSTと、基板Pを基板ホルダ(基板保持装置)PHを介して支持する基板ステージ(ステージ装置)PSTと、マスクステージMSTに支持されているマスクMを露光光ELで照明する照明光学系ILと、露光光ELで照明されたマスクMのパターンを基板ステージPSTに支持されている基板Pに投影する投影光学系PLと、露光装置EX全体の動作を統括制御する制御装置CONTとを備えている。
【0009】
ここで、本実施形態では、露光装置EXとしてマスクMと基板Pとを走査方向における互いに異なる向き(逆方向)に同期移動しつつマスクMに形成されたパターンを基板Pに露光する走査型露光装置(所謂スキャニングステッパ)を使用する場合を例にして説明する。以下の説明において、投影光学系PLの光軸AXと一致する方向をZ軸方向、Z軸方向に垂直な平面内でマスクMと基板Pとの同期移動方向(走査方向)をX軸方向、Z軸方向及びY軸方向に垂直な方向(非走査方向)をY軸方向とする。また、X軸、Y軸、及びZ軸まわり方向をそれぞれ、θX、θY、及びθZ方向とする。なお、ここでいう「基板」は半導体ウエハ上にレジストを塗布したものを含み、「マスク」は基板上に縮小投影されるデバイスパターンを形成されたレチクルを含む。
【0010】
照明光学系ILは、マスクステージMSTに支持されているマスクMを露光光ELで照明するものであり、露光用光源、露光用光源から射出された光束の照度を均一化するオプティカルインテグレータ、オプティカルインテグレータからの露光光ELを集光するコンデンサレンズ、リレーレンズ系、露光光ELによるマスクM上の照明領域を例えばスリット状に設定する可変視野絞り等を有している。マスクM上の所定の照明領域は照明光学系ILにより均一な照度分布の露光光ELで照明される。照明光学系ILから射出される露光光ELとしては、例えば水銀ランプから射出される紫外域の輝線(g線、h線、i線)及びKrFエキシマレーザ光(波長248nm)等の遠紫外光(DUV光)や、ArFエキシマレーザ光(波長193nm)及びF2レーザ光(波長157nm)等の真空紫外光(VUV光)などが用いられる。
【0011】
マスクステージMSTは、マスクMを支持するものであって、投影光学系PLの光軸AXに垂直な平面内、すなわちXY平面内で2次元移動可能及びθZ方向に微小回転可能である。マスクステージMSTは、例えば真空吸着によりマスクMを保持する。マスクステージMSTはリニアモータ等のマスクステージ駆動装置MSTDにより駆動される。マスクステージ駆動装置MSTDは制御装置CONTにより制御される。マスクステージMSTには移動鏡51が設けられ、移動鏡51に対向する位置にはレーザ干渉計52が設けられている。マスクステージMST上のマスクMの2次元方向の位置、及び回転角はレーザ干渉計52によりリアルタイムで計測され、計測結果は制御装置CONTに出力される。制御装置CONTはレーザ干渉計52の計測結果に基づいてマスクステージ駆動装置MSTDを駆動することでマスクステージMSTに支持されているマスクMの位置決めを行う。
【0012】
投影光学系PLは、マスクMのパターンを所定の投影倍率βで基板Pに投影露光するものであって、複数の光学素子(レンズ)で構成されている。本実施形態において、投影光学系PLは、投影倍率βが例えば1/4あるいは1/5の縮小系である。なお、投影光学系PLは等倍系及び拡大系のいずれでもよい。
【0013】
基板ステージPSTは、基板Pを支持するものであって、基板Pを基板ホルダPHを介して保持するZステージ61と、Zステージ61を支持するXYステージ62と、XYステージ62を支持するベース63とを備えている。基板ステージPSTはリニアモータ等の基板ステージ駆動装置PSTDにより駆動される。基板ステージ駆動装置PSTDは制御装置CONTにより制御される。Zステージ61を駆動することにより、Zステージ61上の基板ホルダPHに保持されている基板PのZ軸方向における位置(フォーカス位置)、及びθX、θY方向における位置が制御される。また、XYステージ62を駆動することにより、基板PのXY方向における位置(投影光学系PLの像面と実質的に平行な方向の位置)が制御される。
【0014】
基板ステージPST(Zステージ61)上には移動鏡53が設けられている。また、移動鏡53に対向する位置にはレーザ干渉計54が設けられている。基板ステージPST上の基板Pの2次元方向の位置、及び回転角はレーザ干渉計54によりリアルタイムで計測され、計測結果は制御装置CONTに出力される。制御装置CONTはレーザ干渉計54の計測結果に基づいて基板ステージ駆動装置PSTDを介して基板ステージPSTを駆動することで基板ステージPSTに支持されている基板PのX軸、Y軸方向、及びθZ方向の位置決めを行う。
【0015】
また、露光装置EXは、投影光学系PLの像面に対する基板P表面の位置(フォーカス位置)を検出するフォーカス検出系56を備えている。フォーカス検出系56は、基板P表面に対して斜め方向より検出光を投射する投光部56Aと、基板P表面で反射した前記検出光の反射光を受光する受光部56Bとを備えている。受光部56Bの受光結果は制御装置CONTに出力される。制御装置CONTはフォーカス検出系56の検出結果に基づいて基板ステージ駆動装置PSTDを介して基板ステージPST(Zステージ61)を駆動することで、基板P表面の位置を投影光学系PLの焦点深度内に収める。すなわち、Zステージ61は、基板Pのフォーカス位置及び傾斜角を制御して基板Pの表面をオートフォーカス方式、及びオートレベリング方式で投影光学系PLの像面に合わせ込む。
【0016】
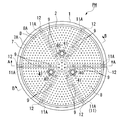
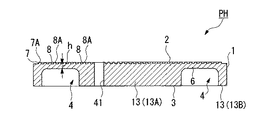
図2は基板ホルダ(基板保持装置)PHを上方(+Z方向)から見た平面図、図3は下方(−Z方向)から見た平面図、図4は図2のA−A矢視断面図、図5は図2のB−B矢視断面図である。
これらの図において、基板ホルダPHは、所定形状を有する本体部1を備えている。本体部1は基板Pに応じた形状を有しており、本実施形態では平面視略円形状に形成されている。本体部1の上面(保持面)2には、基板Pの下面を支持する第1支持部8及び第2支持部7が設けられている。第1支持部8は、上面2に所定間隔で複数に設けられた突起状のピン部により構成されている。第2支持部7は、本体部1の上面2のうち外周部近傍に設けられ、所定幅を有する環状(無端状)に形成された凸部であってシール部を構成している。そして、シール部(第2支持部)7の内側領域に複数のピン部(第1支持部)8が一様に設けられている。
【0017】
本体部1のうち上面2と反対側の下面3には凹部4が形成されており、凹部4にはリブ部5(5A〜5L)が設けられている。凹部4は下面3に環状に形成されており、リブ部5はこの環状に形成された凹部4において放射状に複数設けられている。本実施形態においてリブ部5(5A〜5L)は12本設けられている。本体部1のうち凹部4が形成された部分は所定の厚さhを有する薄肉部6となっている。一方、薄肉部6(凹部4)及びリブ部5の内側部分は平面視ほぼ円形状の厚肉部13Aとなっており、外側部分は平面視環状の厚肉部13Bとなっている。厚肉部13(13A、13B)の厚さとリブ部5の厚さとはほぼ同じである。なお、厚肉部13の厚さとリブ部5の厚さとは互いに異なっていてもよい。厚肉部13と複数のリブ部5のそれぞれとは連続しており、本実施形態において、厚肉部はリブ部の一部を構成している。
【0018】
また、下面3の中央部には、凹部4のない平坦部(平坦領域)14が形成されている。この平坦部14は、外部装置(例えば露光装置等の半導体製造装置)に対して、真空吸着等により装着される領域である。この平坦部14を有することにより、基板ホルダPHを外部装置に装着しても、保持面2が変形することがない。
【0019】
凹部4の形成位置に対応する薄肉部6は平面視ほぼ扇状(矩形状)であってリブ部5どうしの間に複数(12箇所)設けられている。薄肉部6の厚さ、換言すれば本体部1のうち上面2とリブ部5及び厚肉部13以外の裏面3との間の厚さhは、1.5mm以上5.5mm以下に設定されており、好ましくは3.0mm以上5.5mm以下に設定されている。この厚さhの最適化手順については後述する。
【0020】
本体部1の上面2に設けられたピン部8のそれぞれの上端面8A及びシール部7の上端面7Aは平坦面となっている。また、複数のピン部8のそれぞれは互いにほぼ同じ高さに設けられているとともに、シール部7とピン部8とも互いにほぼ同じ高さに設けられている。換言すれば、複数の上端面8A及び上端面7Aはほぼ同一平面上に位置している。基板Pはこれら複数のピン部8の上端面8A及びシール部7の上端面7Aに支持されるようになっている。つまり、ピン部8の上端面8A及びシール部7の上端面7Aが、基板Pを保持する保持面の一部を構成している。シール部7はこの上に載置される基板Pの外径より僅かに小さい外径を有している。
【0021】
基板ホルダPH(本体部1)は軽量で高剛性な材料である炭化珪素セラミックス(SiCセラミックス)により形成されている。炭化珪素セラミックスは高硬度材料であって耐摩耗性に優れており、基板ホルダPHに対する基板Pのロード及びアンロードを繰り返した場合でも摩耗し難い。また、炭化珪素セラミックスは導電性を有しており、基板ホルダPHに対する基板Pのロード及びアンロードを繰り返した場合でも帯電し難い。本体部1、ピン部8、シール部7、及びリブ部5(厚肉部13)は、炭化珪素セラミックスにより一体成型されている。
【0022】
本体部1には基板Pを保持して昇降可能なリフトピン40及びこのリフトピン40が配置されるリフトピン用穴41が形成されている。リフトピン40及びこれに対応するリフトピン用穴41は上面2の中央部近傍において、つまり厚肉部13Aにおいて、正三角形のほぼ頂点に対応する位置にそれぞれ設けられている。リフトピン用穴41の周囲にも、環状(無端状)に形成され、ピン部8とほぼ同じ高さを有するシール部が設けられている。3本のリフトピン40は上下方向(Z軸方向)に同時に同一量だけ昇降自在となっている。基板ホルダPHに対する基板Pのロード及びアンロード時において、リフトピン40が不図示の駆動機構により昇降することで、基板Pを下方から支持したり、基板Pを支持した状態で上下動することができるようになっている。
【0023】
本体部1の上面2の複数の所定位置には基板Pを真空吸着保持するための吸着孔9がそれぞれ形成されている。本実施形態では、図2に示すように、吸着孔9は上面2の中心部近傍から放射方向(ほぼ60°の中心角の間隔を有する6つの半径の方向)に沿って2つずつ形成され、全部で10箇所に形成されている。また、本体部1内部には、吸着孔9と基板ホルダPH外部に設けられた給排気装置10とを接続する流路11(11A〜11C)が形成されている。
【0024】
流路11は、本体部1の平面視中央部から放射方向に延びるように形成された複数(6つ)の主流路11Aと、主流路11Aの複数の所定位置と吸着孔9のそれぞれとを接続する枝流路11Bと、主流路11Aの所定位置と厚肉部13の下面3とを接続する副流路11Cとを備えている。なお、副流路11Cはリブ部5の下面と主流路11Aとを接続するように形成されていてもよい。図2及び図3に示すように、6つの主流路11Aの一端部のそれぞれは本体部1の中央部で集合している。一方、主流路11Aの他端部のそれぞれには蓋部材12が取り付けられている。すなわち、主流路11A、枝流路11B、及び副流路11Cのそれぞれは、本体部1内部において互いに接続されているとともに、吸着孔9及び副流路11Cのみを介して本体部1内部と外部とが連通されている。したがって、副流路11Cに接続された給排気装置10が吸引動作(排気動作)を実行すると、副流路11C、主流路11A、及び枝流路11Bを介して吸着孔9より気体が吸引されるようになっている。そして、ピン部8及びシール部7に基板Pを載置した状態で給排気装置10が吸引動作を実行することにより、基板P及びシール部7で囲まれた空間が負圧になり、これにより基板Pは本体部1の上面2(上端面8A、7A)に対して吸着される。
【0025】
図3などに示すように、流路11はリブ部5に対応して設けられている。具体的には、主流路11Aは、厚肉部13と複数のリブ部5A〜5Lのうち特定のリブ部(第1のリブ部)5A、5C、5E、5G、5I、5Kのそれぞれとに亘って形成されている。副流路11Cは、厚肉部13の所定位置に形成されている。なお上述したように、副流路11Cはリブ部5に形成されていてもよい。吸着孔9に接続する枝流路11Bは、複数のリブ部5A〜5Lのうち特定のリブ部(第1のリブ部)5A、5C、5E、5G、5I、5Kに形成されており、これに伴って吸着孔9も特定のリブ部(第1のリブ部)5A、5C、5E、5G、5I、5Kの上面側に形成されている。なお本実施形態において、複数の枝流路11B及び吸着孔9のうち、本体部1の平面視中央部近傍の枝流路11B及び吸着孔9は、リブ部の一部を構成する厚肉部13に形成されている。
【0026】
図3に示すように、流路11(11A〜11C)が設けられているリブ部(第1のリブ部)5A、5C、5E、5G、5I、5Kの幅(太さ)K1は、流路11が設けられていないリブ部(第2のリブ部)5B、5D、5F、5H、5J、5Lの幅(太さ)K2より大きく(太く)形成されている。本実施形態では、第1のリブ部と第2のリブ部とは周方向(θZ方向)に関して交互に設けられている。つまり、互いに異なる幅K1、K2を有する複数のリブ部5が、基板ホルダPHの平面視中心部に関して対称(点対称)となるように配置されている。これにより、基板ホルダPHの平面視中心部に重心が位置することになる。
【0027】
次に、基板ホルダPHの製造方法の一例について説明する。基板ホルダPHの形成材料(本実施形態では炭化珪素セラミックス)を切削加工等の所定の加工法で加工することで、ピン部8、シール部7、凹部4、及びリブ部5を含む大まかな外形が形成される。次いで、穴加工により流路11(11A〜11C)が形成される。ここで、本体部1の側面のうち第1のリブ部5に対応する位置の側面の一端部と他端部とを接続するように貫通穴を形成することで主流路11Aが形成される。そして、焼成後、その貫通穴の両端部に蓋部材12が取り付けられる。これと並行して、本体部1の上面2と本体部1内部に形成されている主流路11Aとを接続するように穴を開けることで枝流路11Bが形成され、下面3と主流路11Aとを接続するように穴を開けることで副流路11Cが形成される。以上の手順により本体部1内部に流路11(11A〜11C)が形成される。そして、仕上げ加工することで基板ホルダPHが形成される。仕上げ加工には、ピン部8及びシール部7に対する研磨加工が含まれる。ここで、研磨加工では、図6に示す模式図のように、ピン部8及びシール部7を含む本体部1の上面2を下に向け、研磨装置70の研磨面71に対して上面2(ピン部8、シール部7)を所定の加工圧力で押し当てた状態で研磨装置70を回転することでピン部8の上端面8A及びシール部7の上端面7Aが研磨される。研磨加工では、例えば基板ホルダPHに錘72を載せるなどして所望の加工圧力を加えた状態で行われる。
【0028】
ところで、本体部1の強度が十分でないと、上記研磨加工時において本体部1、特に薄肉部6が変形し、所望の平坦度を得ることができない可能性がある。研磨加工では、研磨対象となる上面2は一定の加工圧力を受けながら研磨されるため、本体部1の薄肉部6が十分な強度を有していない場合、加工圧力を除去した状態にすると、図7の模式図に示すように、上面2は上向き凸状に撓むように変形する。この凸状の変形量が大きいと、つまり本体部1の上面2が所望の平坦度を有していないと、基板Pを保持した際に基板Pの平坦度に影響を及ぼし、投影光学系PLの焦点深度内に基板P表面を収めることができなくなる不都合が生じる。そこで、基板ホルダPHの上面2の上記凸状の変形量が許容範囲内となるように、つまり基板Pを保持した際の基板Pの平坦度が許容範囲内となるように、薄肉部6の厚みや大きさについて最適化を図った。以下、最適化するための手順について説明する。
【0029】
薄肉部6の上記凸状の変形量を計算するために、図8に示す単純化モデルを定義する。図8には、薄肉部6の単純化モデルとして円形平板20の周縁部を固定し、この円形平板20に一定の加工圧力を加えたときの状態が示されている。すなわち円形平板20は、厚肉部13(13A、13B)を含むリブ部5によって周囲を囲まれた薄肉部6をモデル化したものである。加工圧力を加えた状態状態では、円形平板20は図8に示すように下向き凸状(つまり凹状)に変形する。このときの円形平板20の中心での変形量wは次式で表すことができる。
【数1】

p:加工圧力、
d:円形平板の直径、
ν:ポアソン比、
E:ヤング率、
h:円形平板の厚さ(すなわち薄肉部の厚さ)、
である。
【0030】
加工圧力は、基板ホルダPHの自重、研磨加工時に基板ホルダPHに載せる補助的な錘の重量、保持面の面積等から計算されるが、ここでは、一般的な加工圧力としてp=300Paとする。また、基板ホルダPHの形成材料である炭化珪素セラミックスの物性より、E=400GPa、ν=0.17である。そして、円形平板の許容値としてw=2nmとし、これらの値を上記(1)式に代入して式を変形すると、
【数2】
【0031】
上記の計算は、薄肉部6を円形平板20にモデル化したものであるが、実際には薄肉部6は円形ではなく、上記実施形態に示したように略扇状(略矩形状)であったり多角形であるなど様々な形状や大きさが想定される。しかしながら、実際の基板Pの大きさや基板ホルダPHの加工上の制約などから、dの値、つまり薄肉部6の大きさとしては30mm〜80mm程度が現実的である。そこで、このdの値を上記(2)式に代入すると、
d=30mmのとき、h=1.51mm、
d=80mmのとき、h=5.58mm、となる。したがって、薄肉部6の大きさに応じて、薄肉部6の厚さhを1.5mm以上5.5mm以下程度にすることが好ましい。
【0032】
また、代表的な基板Pであるシリコンウエハは、例えば0.5μm程度のうねりを持つため、薄肉部6はシリコンウエハのうねりを矯正するために十分な厚さを持たなければならない。シリコンウエハの曲げ剛性及び薄肉部6の曲げ剛性は厚さの比の3乗に比例し、ヤング率の比に比例する。0.5μm程度のうねりを2nm程度に矯正するための必要な薄肉部6の厚さhを計算すると、3mm以上となる。したがって、薄肉部6の厚さhを3.0mm以上5.5mm以下程度にすることがより好ましい。なお、シリコンウエハのうねりの大きさによっては必ずしも3mm以上である必要はない。
【0033】
また、放射状に配置されたリブ部5の数をn、平面視円形状の基板ホルダPHの直径をD、リブ部5どうしの間の円弧の長さをLとすると、
【数3】
【0034】
更に、リブ部5を放射状に配置した場合、流路11をリブ部5内部に設けることで、流路11を加工性良く形成することができる。ここで、本実施形態では、上述したように、流路11は大きい幅K1を有する第1のリブ部に形成されている。そして、幅K1は7mm以上10mm以下にすることが加工性の観点から好ましい。
【0035】
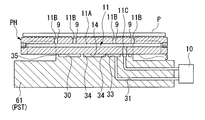
図9は、基板ステージPST(Zステージ61)に保持された基板ホルダPHを示す断面図である。図9に示すように、Zステージ61の上面には、基板ホルダPHの下面3を真空吸着保持する保持部(保持面)30が設けられている。保持部30には、Zステージ61内部に形成された第1流路31を介して給排気装置10に接続された吸着孔33が形成されている。また、保持部30には突起部である複数のピン部34が設けられており、保持部30の周縁部には環状のシール部35が設けられている。ピン部34の上端面及びシール部35の上端面は平坦面であって略同一平面上に位置しており、これら上端面で基板ホルダPHの下面を支持する。そして、基板ホルダPHの下面3とシール部35とで形成される空間の気体を給排気装置10が第1流路31及び吸着孔33を介して吸引することでこの空間が負圧にされ、基板ホルダPHがZステージ61の保持部30に吸着保持されるようになっている。また、Zステージ61の内部には、保持部30に保持された基板ホルダPHの副流路11Cに接続可能な第2流路32が設けられており、給排気装置10が第2流路32及び基板ホルダPH内部の流路11(11A〜11C)を介して吸着孔9より気体を吸引することで、基板ホルダPHに基板Pが吸着保持される。一方、給排気装置10が気体を供給(吹き出し)することで、Zステージ61と基板ホルダPHとの吸着保持が解除され、基板ホルダPHと基板Pとの吸着保持が解除されるようになっている。
【0036】
次に、本実施形態の露光装置EXにおける基板ホルダPHに対する基板Pのロード時及びアンロード時における動作について説明する。
ここで、基板Pのロード時においては、給排気装置10による給気動作及び排気動作は停止されている。不図示の基板ローダにより、基板Pが基板ホルダPH上に搬送されると、制御装置CONTは、基板ホルダPHに設けられているリフトピン40を上昇する。リフトピン40の上昇量が所定量に達すると、基板ローダ上の基板Pがリフトピン40に渡され、基板ローダが基板ホルダPH上方から配置する。その後、リフトピン40が下降することにより、基板ホルダPH上に基板Pが載置される。
【0037】
上記のようにして基板ホルダPH上に基板Pが載置されると、制御装置CONTは、給排気装置10を使って、基板Pと基板ホルダPHのシール部7及び上面2とで囲まれた空間の気体を吸引(排気)する。こうして基板Pを基板ホルダPHに対して吸着保持することで基板Pのロード作業が終了する。
【0038】
基板ホルダPHの保持面は平坦度良く形成されているため、基板Pは所望の平坦度を維持した状態で基板ホルダPHに保持される。そして、制御装置CONTは、マスクステージMSTに支持されるマスクMを照明光学系ILにより露光光ELで照明し、基板ホルダPHに保持された基板Pに対して投影光学系PLを介してマスクMのパターンの像を投影する。基板Pは所望の平坦度を維持されているので、その表面(被露光処理面)は投影光学系PLの焦点深度内に円滑に収められる。また、基板ホルダPHは凹部40を形成されていることで十分に軽量化されているため、基板P及びこの基板ホルダPHを保持して移動する基板ステージPSTの高速化・高加速度化を実現でき、しかも短い位置決め整定時間を実現でき、高い位置決め精度で位置決めすることができる。
【0039】
露光処理が終了した後、基板Pを基板ホルダPHからアンロードするために、制御装置CONTは給排気装置10の吸引動作を停止する。次いで、制御装置CONTはリフトピン40を所定量上昇するとともに、給排気装置10を駆動し、基板Pの下面に対して気体を供給する。これにより、基板Pと基板ホルダPHとの間の負圧状態が解除される。
【0040】
リフトピン40が所定量上昇すると、ピン部8及びシール部7で支持されている基板Pがリフトピン40に渡されるので、不図示の基板アンローダが基板Pの下側に入り込むとともに、リフトピン40が下降することで、リフトピン40から基板アンローダに基板Pが渡される。そして、基板アンローダが基板ホルダPHから退避することにより、基板のアンロード作業が終了する。
【0041】
以上説明したように、基板Pを保持可能な基板ホルダPHの本体部1のうち、基板Pを保持する保持面2(7A、8A)とは反対側の下面3側に凹部4を形成したことにより、軽量化を実現することができる。そして、この凹部4にリブ部5を設けたことにより、凹部4を設けたことによって形成された薄肉部6の強度が維持され、基板Pを平坦度良く保持できる。また、リブ部5により強度が維持されているので、保持面2、7A、8Aを研磨処理した場合でも保持面(薄肉部)の撓みの発生を抑制し、保持面自体の平坦度を向上することができる。また、基板Pを真空吸着方式で保持する場合、吸着孔9及びこれに接続される流路11をリブ部5に設けることで、強度を維持しつつ容易に流路11を形成することができる。
【0042】
なお、上記実施形態において、リブ部5は放射状に12本設けられているが、リブ部5以外の薄肉部6の変形を抑えることができれば、その数や配置は任意に設定可能である。また、基板Pを保持するピン部8の配置や数も任意に設定可能である。また、複数のリブ部5それぞれの幅や形状は全て同じでもよいし互いに異なっていてもよい。また、上記実施形態では、本体部1の下面側中央部に平面視円形状の厚肉部13Aが形成され、この厚肉部13Aを囲むように所定の幅K1、K2を有するリブ部5が配置された構成であるが、厚肉部13Aを設けずに、本体部1の下面中央部を中心に所定の幅を有するリブ部5を放射状に配置するようにしてもよい。また、リブ部5どうしの間に設けられた複数の薄肉部6の大きさや形状も全て同じでもよいし互いに異なっていてもよい。
【0043】
上記実施形態では、基板Pを基板ホルダPHに吸着する吸着機構が真空吸着機構である場合を例にして説明したが、本発明がこれに限定されるものではない。すなわち、吸着機構として例えば静電チャック機構を採用してもよい。この場合、シール部は不要となるため、第2支持部7は環状あるいは無端状である必要が無くなり、一部が欠けた全体として環状の凸部などにより構成することができる。あるいは、ピン部8の先端に静電チャックの機能を持たせればシール部(第2支持部)そのものを設けなくてもよい。
【0044】
また、上記実施形態では、本発明の基板保持装置が、基板Pを保持する基板ホルダに適用された例について説明したが、例えば反射型レチクルではその裏面側をレチクルホルダ(マスクホルダ)で保持するので、このようなレチクルホルダに対して本発明を適用することもできる。
【0045】
上記実施形態では、本体部1、ピン部8、シール部7、リブ部5、及び厚肉部13等は炭化珪素セラミックスにより一体成型されているように説明したが、複数の部材1、8、7、5、13等をそれぞれ別々に形成した後、これらを接合するようにしてもよい。また、本実施形態では、基板ホルダPHの全部を炭化珪素セラミックスで形成しているが、その一部を炭化珪素セラミックスで形成し、残りの一部を別の材料により形成してもよい。また、炭化珪素セラミックス以外の材料で基板ホルダPHを形成するようにしてもよい。なお上述したように、炭化珪素セラミックスは耐摩耗性等に優れ、帯電防止機能も有することから基板ホルダPHの形成材料として好ましい。
【0046】
上記実施形態の露光装置EXとしては、マスクMと基板Pとを同期移動してマスクMのパターンを露光する走査型の露光装置にも適用することができるし、マスクMと基板Pとを静止した状態でマスクMのパターンを露光し、基板Pを順次ステップ移動させるステップ・アンド・リピート型の露光装置にも適用することができる。
【0047】
露光装置EXの用途としては半導体製造用の露光装置や、角型のガラスプレートに液晶表示素子パターンを露光する液晶用の露光装置に限定されることなく、薄膜磁気ヘッドを製造するための露光装置にも広く適当できる。
【0048】
投影光学系PLとしては、エキシマレーザなどの遠紫外線を用いる場合は硝材として石英や蛍石などの遠紫外線を透過する材料を用い、F2レーザやX線を用いる場合は反射屈折系または屈折系の光学系にし(マスクも反射型タイプのものを用いる)、また、電子線を用いる場合には光学系として電子レンズおよび偏向器からなる電子光学系を用いればいい。なお、電子線が通過する光路は真空状態にすることはいうまでもない。
【0049】
基板ステージPSTやマスクステージMSTにリニアモータを用いる場合は、エアベアリングを用いたエア浮上型およびローレンツ力またはリアクタンス力を用いた磁気浮上型のどちらを用いてもいい。また、ステージは、ガイドに沿って移動するタイプでもいいし、ガイドを設けないガイドレスタイプでもよい。
【0050】
ステージの駆動装置として平面モ−タを用いる場合、磁石ユニット(永久磁石)と電機子ユニットのいずれか一方をステージに接続し、磁石ユニットと電機子ユニットの他方をステージの移動面側(ベース)に設ければよい。
【0051】
基板ステージPSTの移動により発生する反力は、特開平8−166475号公報に記載されているように、フレーム部材を用いて機械的に床(大地)に逃がしてもよい。本発明は、このような構造を備えた露光装置においても適用可能である。
【0052】
マスクステージMSTの移動により発生する反力は、特開平8−330224号公報に記載されているように、フレーム部材を用いて機械的に床(大地)に逃がしてもよい。本発明は、このような構造を備えた露光装置においても適用可能である。
【0053】
本実施形態の露光装置EXは、本願特許請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0054】
半導体デバイスは、図10に示すように、デバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、デバイスの基材である基板(ウエハ、ガラスプレート)を製造するステップ203、前述した実施形態の露光装置によりマスクMのパターンを感光基板Pに露光する基板処理ステップ204、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)205、検査ステップ206等を経て製造される。
【0055】
【発明の効果】
本発明によれば、基板保持装置の軽量化が実現され、基板を高い平坦度で保持可能であるため、移動するステージ装置の高速化・高加速度化を実現しつつ基板を投影光学系の焦点深度内に良好に収めることができる。したがって、高スループット且つ高いパターン転写精度で露光処理することができる。
【図面の簡単な説明】
【図1】本発明の基板保持装置を備えた露光装置の一実施形態を示す概略構成図である。
【図2】本発明の基板保持装置の一実施形態を示す上面側から見た図である。
【図3】図2を下面側から見た図である。
【図4】図2のA−A矢視断面図である。
【図5】図2のB−B矢視断面図である。
【図6】基板保持装置の保持面を研磨処理する様子を説明するための模式図である。
【図7】基板保持装置の保持面を研磨処理する様子を説明するための模式図である。
【図8】基板保持装置の形態を最適化するための計算モデルを説明するための模式図である。
【図9】基板保持装置を保持したステージ装置の一実施形態を示す図である。
【図10】半導体デバイスの製造工程の一例を示すフローチャート図である。
【符号の説明】
1…本体部、2…上面(保持面)、3…下面、4…凹部、
5(5A〜5L)…リブ部、
5A、5C、5E、5G、5I、5K…第1のリブ部、
5B、5D、5F、5H、5J、5L…第2のリブ部、
6…薄肉部、7…シール部(第2支持部)、7A…上端面(保持面)、
8…ピン部(第1支持部)、8A…上端面(保持面)、9…吸着孔、
11(11A〜11C)…流路、14…平坦部(平坦領域)、
EX…露光装置、P…基板、PH…基板ホルダ(基板保持装置)、
PST…基板ステージ(ステージ装置)[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a substrate holding apparatus, a stage apparatus, and an exposure apparatus that hold a substrate.
[0002]
[Prior art]
Microdevices such as semiconductor devices and liquid crystal display devices are manufactured by a so-called photolithography technique in which a pattern formed on a mask is transferred onto a photosensitive substrate. An exposure apparatus used in this photolithography process has a mask stage that supports a mask via a mask holder and a substrate stage that supports a substrate via a substrate holder, and a pattern formed on the mask is mask stage. In addition, the substrate stage is transferred to the substrate through the projection optical system while sequentially moving the substrate stage. In order to improve throughput and pattern transfer accuracy, etc., the exposure apparatus requires high speed and high acceleration when moving the mask stage and substrate stage, and improved positioning accuracy. There is a demand for lighter stages.
[0003]
[Patent Document 1]
Japanese Patent No. 3000361
[0004]
[Problems to be solved by the invention]
Incidentally, the mask holder is configured to hold the end portion of the mask, and it is difficult to apply the technique disclosed in
[0005]
The present invention has been made in view of such circumstances, and provides a substrate holding device capable of reducing the weight and holding the substrate with high flatness, a stage device including the substrate holding device, and an exposure apparatus. With the goal.
[0006]
[Means for Solving the Problems]
In order to solve the above-described problems, the present invention employs the following configuration corresponding to FIGS. 1 to 10 shown in the embodiment.
The substrate holding device (PH) of the present invention is a substrate holding device for holding a substrate (P), and includes a main body (1) having a holding surface (2, 7A, 8A) for holding the substrate (P). The concave portion (4) is formed on the surface (3) opposite to the holding surface (2, 7A, 8A) of the portion (1), and the rib portion (5) is provided on the concave portion (4). And
According to the present invention, the weight can be reduced by forming the concave portion on the surface opposite to the holding surface for holding the substrate among the main body that can hold the substrate. By providing the rib portion in the recess, the strength of the holding surface is maintained, and the substrate can be held while maintaining a high (good) flatness. In addition, since the strength is maintained by the rib portion, even when the holding surface is polished, the occurrence of bending of the holding surface is suppressed, and the flatness of the holding surface itself can be improved. Further, when the substrate is held by the vacuum suction method, the flow path can be easily formed while maintaining the strength by providing the suction hole and the flow path connected to the suction hole in the rib portion.
[0007]
The stage apparatus (PST) of the present invention is a stage apparatus that can move while supporting a substrate holding apparatus that holds a substrate (P), and the substrate holding apparatus is configured by the substrate holding apparatus (PH) described above. It is characterized by that.
An exposure apparatus (EX) of the present invention is an exposure apparatus that exposes a pattern onto a substrate (P) held on a substrate stage, wherein the substrate stage is constituted by the stage device (PST) described above. And
According to the present invention, weight reduction is realized, and the substrate is held via the substrate holding device that can hold the substrate with good flatness. Therefore, the movement of the stage device can be increased in speed while maintaining high positioning accuracy. Acceleration can be realized. In addition, since the substrate can be held with good flatness, even when the numerical aperture of the projection optical system is increased and the depth of focus is reduced, the substrate surface (exposure processing surface) can be satisfactorily kept within the depth of focus. Therefore, the mask pattern can be exposed to the substrate with high pattern transfer accuracy.
[0008]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, a substrate holding apparatus, a stage apparatus, and an exposure apparatus of the present invention will be described with reference to the drawings. FIG. 1 is a schematic block diagram showing an embodiment of an exposure apparatus provided with a stage apparatus for holding a substrate via a substrate holding apparatus (substrate holder) of the present invention.
In FIG. 1, an exposure apparatus EX is supported by a mask stage MST that supports a mask M, a substrate stage (stage apparatus) PST that supports a substrate P via a substrate holder (substrate holding apparatus) PH, and a mask stage MST. An illumination optical system IL for illuminating the mask M exposed with the exposure light EL, a projection optical system PL for projecting the pattern of the mask M illuminated with the exposure light EL onto the substrate P supported by the substrate stage PST, and an exposure apparatus And a control device CONT that controls the overall operation of the EX.
[0009]
Here, in the present embodiment, as the exposure apparatus EX, scanning exposure is performed in which the pattern formed on the mask M is exposed to the substrate P while the mask M and the substrate P are synchronously moved in different directions (reverse directions) in the scanning direction. A case where an apparatus (so-called scanning stepper) is used will be described as an example. In the following description, the direction that coincides with the optical axis AX of the projection optical system PL is the Z-axis direction, the synchronous movement direction (scanning direction) between the mask M and the substrate P in the plane perpendicular to the Z-axis direction is the X-axis direction, A direction (non-scanning direction) perpendicular to the Z-axis direction and the Y-axis direction is defined as a Y-axis direction. Further, the directions around the X axis, the Y axis, and the Z axis are defined as θX, θY, and θZ directions, respectively. Here, the “substrate” includes a semiconductor wafer coated with a resist, and the “mask” includes a reticle on which a device pattern to be reduced and projected on the substrate is formed.
[0010]
The illumination optical system IL illuminates the mask M supported by the mask stage MST with the exposure light EL. The exposure light source, the optical integrator for uniformizing the illuminance of the light beam emitted from the exposure light source, and the optical integrator A condenser lens for condensing the exposure light EL from the lens, a relay lens system, and a variable field stop for setting the illumination area on the mask M by the exposure light EL in a slit shape, for example. A predetermined illumination area on the mask M is illuminated with the exposure light EL having a uniform illuminance distribution by the illumination optical system IL. As the exposure light EL emitted from the illumination optical system IL, for example, far ultraviolet light (g-line, h-line, i-line) and KrF excimer laser light (wavelength 248 nm) emitted from a mercury lamp, DUV light), ArF excimer laser light (wavelength 193 nm) and F 2 Vacuum ultraviolet light (VUV light) such as laser light (wavelength 157 nm) is used.
[0011]
The mask stage MST supports the mask M, and can move two-dimensionally in a plane perpendicular to the optical axis AX of the projection optical system PL, that is, in the XY plane, and can be slightly rotated in the θZ direction. The mask stage MST holds the mask M by, for example, vacuum suction. The mask stage MST is driven by a mask stage driving device MSTD such as a linear motor. The mask stage driving device MSTD is controlled by the control device CONT. The mask stage MST is provided with a moving
[0012]
The projection optical system PL projects and exposes the pattern of the mask M onto the substrate P at a predetermined projection magnification β, and includes a plurality of optical elements (lenses). In the present embodiment, the projection optical system PL is a reduction system having a projection magnification β of, for example, 1/4 or 1/5. Note that the projection optical system PL may be either an equal magnification system or an enlargement system.
[0013]
The substrate stage PST supports the substrate P, and includes a
[0014]
A
[0015]
The exposure apparatus EX also includes a
[0016]
2 is a plan view of the substrate holder (substrate holding device) PH as viewed from above (+ Z direction), FIG. 3 is a plan view as viewed from below (−Z direction), and FIG. 4 is a cross-sectional view taken along line AA in FIG. FIG. 5 and FIG. 5 are sectional views taken along line BB in FIG.
In these drawings, the substrate holder PH includes a
[0017]
A
[0018]
Further, a flat portion (flat region) 14 having no
[0019]
The
[0020]
Each
[0021]
The substrate holder PH (main body 1) is formed of silicon carbide ceramics (SiC ceramics), which is a lightweight and highly rigid material. Silicon carbide ceramics is a high-hardness material and has excellent wear resistance, and is hardly worn even when the loading and unloading of the substrate P with respect to the substrate holder PH are repeated. In addition, silicon carbide ceramics has conductivity, and is difficult to be charged even when the loading and unloading of the substrate P with respect to the substrate holder PH is repeated.
[0022]
The
[0023]
Suction holes 9 for holding the substrate P by vacuum suction are formed at a plurality of predetermined positions on the
[0024]
The
[0025]
As shown in FIG. 3 and the like, the
[0026]
As shown in FIG. 3, the width (thickness) K1 of the rib portions (first rib portions) 5A, 5C, 5E, 5G, 5I, and 5K in which the flow paths 11 (11A to 11C) are provided The rib portions (second rib portions) 5B, 5D, 5F, 5H, 5J, and 5L, which are not provided with the
[0027]
Next, an example of a method for manufacturing the substrate holder PH will be described. A rough outer shape including the
[0028]
By the way, if the strength of the
[0029]
In order to calculate the convex deformation amount of the
[Expression 1]
p: processing pressure,
d: Diameter of circular flat plate,
ν: Poisson's ratio,
E: Young's modulus
h: the thickness of the circular flat plate (that is, the thickness of the thin portion),
It is.
[0030]
The processing pressure is calculated from the weight of the substrate holder PH, the weight of an auxiliary weight placed on the substrate holder PH during polishing, the area of the holding surface, and the like. Here, p = 300 Pa as a general processing pressure. . Further, E = 400 GPa and ν = 0.17 because of the physical properties of silicon carbide ceramics which is the material for forming the substrate holder PH. Then, if w = 2 nm is set as the allowable value of the circular flat plate, and these values are substituted into the above equation (1),
[Expression 2]
[0031]
In the above calculation, the
When d = 30 mm, h = 1.51 mm,
When d = 80 mm, h = 5.58 mm. Therefore, it is preferable to set the thickness h of the
[0032]
In addition, since a silicon wafer as a typical substrate P has a waviness of about 0.5 μm, for example, the
[0033]
Moreover, when the number of the
[Equation 3]
[0034]
Furthermore, when the
[0035]
FIG. 9 is a cross-sectional view showing the substrate holder PH held on the substrate stage PST (Z stage 61). As shown in FIG. 9, a holding portion (holding surface) 30 that holds the
[0036]
Next, operations when loading and unloading the substrate P with respect to the substrate holder PH in the exposure apparatus EX of the present embodiment will be described.
Here, when the substrate P is loaded, the air supply and exhaust operations by the air supply /
[0037]
When the substrate P is placed on the substrate holder PH as described above, the control device CONT is surrounded by the substrate P, the
[0038]
Since the holding surface of the substrate holder PH is formed with good flatness, the substrate P is held by the substrate holder PH while maintaining the desired flatness. Then, the control device CONT illuminates the mask M supported by the mask stage MST with the exposure light EL by the illumination optical system IL, and applies the mask M to the substrate P held by the substrate holder PH via the projection optical system PL. The image of the pattern is projected. Since the desired flatness of the substrate P is maintained, the surface (surface to be exposed) is smoothly accommodated within the focal depth of the projection optical system PL. Further, since the substrate holder PH is sufficiently lightened by forming the
[0039]
After the exposure process is completed, the control device CONT stops the suction operation of the air supply /
[0040]
When the
[0041]
As described above, the
[0042]
In addition, in the said embodiment, although the
[0043]
In the above embodiment, the case where the suction mechanism for sucking the substrate P to the substrate holder PH is a vacuum suction mechanism has been described as an example, but the present invention is not limited to this. That is, for example, an electrostatic chuck mechanism may be employed as the adsorption mechanism. In this case, since the seal portion is unnecessary, the
[0044]
Further, in the above-described embodiment, the example in which the substrate holding device of the present invention is applied to the substrate holder that holds the substrate P has been described. However, for example, in a reflective reticle, the back side is held by a reticle holder (mask holder). Therefore, the present invention can be applied to such a reticle holder.
[0045]
In the above embodiment, the
[0046]
The exposure apparatus EX of the above embodiment can be applied to a scanning type exposure apparatus that exposes the pattern of the mask M by synchronously moving the mask M and the substrate P, and the mask M and the substrate P are stationary. In this state, the pattern of the mask M is exposed, and the present invention can also be applied to a step-and-repeat type exposure apparatus that sequentially moves the substrate P stepwise.
[0047]
The exposure apparatus EX is not limited to an exposure apparatus for manufacturing a semiconductor or an exposure apparatus for liquid crystal that exposes a liquid crystal display element pattern on a rectangular glass plate, but an exposure apparatus for manufacturing a thin film magnetic head. Can also be widely applied.
[0048]
As the projection optical system PL, when using far ultraviolet rays such as excimer laser, a material that transmits far ultraviolet rays such as quartz or fluorite is used as a glass material. 2 When a laser or X-ray is used, a catadioptric system or a refractive optical system is used (the mask is also of a reflective type). When an electron beam is used, an electron consisting of an electron lens and a deflector Use an optical system. Needless to say, the optical path through which the electron beam passes is in a vacuum state.
[0049]
When a linear motor is used for the substrate stage PST and the mask stage MST, either an air levitation type using an air bearing or a magnetic levitation type using a Lorentz force or a reactance force may be used. The stage may be a type that moves along a guide, or may be a guideless type that does not have a guide.
[0050]
When a flat motor is used as the stage drive device, either the magnet unit (permanent magnet) or the armature unit is connected to the stage, and the other of the magnet unit and armature unit is connected to the stage moving surface (base). Should be provided.
[0051]
The reaction force generated by the movement of the substrate stage PST may be released mechanically to the floor (ground) using a frame member as described in JP-A-8-166475. The present invention can also be applied to an exposure apparatus having such a structure.
[0052]
The reaction force generated by the movement of the mask stage MST may be released mechanically to the floor (ground) using a frame member as described in JP-A-8-330224. The present invention can also be applied to an exposure apparatus having such a structure.
[0053]
The exposure apparatus EX of the present embodiment is manufactured by assembling various subsystems including the constituent elements recited in the claims of the present application so as to maintain predetermined mechanical accuracy, electrical accuracy, and optical accuracy. Is done. To ensure these various accuracies, before and after this assembly, various optical systems are adjusted to achieve optical accuracy, various mechanical systems are adjusted to achieve mechanical accuracy, and various electrical systems are Adjustments are made to achieve electrical accuracy. The assembly process from the various subsystems to the exposure apparatus includes mechanical connection, electrical circuit wiring connection, pneumatic circuit piping connection, and the like between the various subsystems. Needless to say, there is an assembly process for each subsystem before the assembly process from the various subsystems to the exposure apparatus. When the assembly process of the various subsystems to the exposure apparatus is completed, comprehensive adjustment is performed to ensure various accuracies as the entire exposure apparatus. The exposure apparatus is preferably manufactured in a clean room where the temperature, cleanliness, etc. are controlled.
[0054]
As shown in FIG. 10, the semiconductor device includes a
[0055]
【The invention's effect】
According to the present invention, since the weight of the substrate holding device is reduced and the substrate can be held with high flatness, the substrate can be focused on the projection optical system while the moving stage device can be increased in speed and acceleration. It can fit well within the depth. Therefore, exposure processing can be performed with high throughput and high pattern transfer accuracy.
[Brief description of the drawings]
FIG. 1 is a schematic block diagram showing an embodiment of an exposure apparatus provided with a substrate holding apparatus of the present invention.
FIG. 2 is a top view showing an embodiment of the substrate holding apparatus of the present invention.
FIG. 3 is a view of FIG. 2 viewed from the lower surface side.
4 is a cross-sectional view taken along arrow AA in FIG. 2;
5 is a cross-sectional view taken along the line BB in FIG.
FIG. 6 is a schematic diagram for explaining how the holding surface of the substrate holding device is polished.
FIG. 7 is a schematic diagram for explaining how the holding surface of the substrate holding device is polished.
FIG. 8 is a schematic diagram for explaining a calculation model for optimizing the form of the substrate holding device.
FIG. 9 is a view showing an embodiment of a stage apparatus holding a substrate holding apparatus.
FIG. 10 is a flowchart showing an example of a semiconductor device manufacturing process.
[Explanation of symbols]
DESCRIPTION OF
5 (5A-5L) ... rib part,
5A, 5C, 5E, 5G, 5I, 5K, the first rib portion,
5B, 5D, 5F, 5H, 5J, 5L ... 2nd rib part,
6 ... Thin portion, 7 ... Seal portion (second support portion), 7A ... Upper end surface (holding surface),
8: Pin portion (first support portion), 8A: Upper end surface (holding surface), 9 ... Suction hole,
11 (11A to 11C) ... flow path, 14 ... flat part (flat region),
EX ... exposure device, P ... substrate, PH ... substrate holder (substrate holding device),
PST: Substrate stage (stage device)
Claims (13)
前記基板を保持する保持面を有する本体部を備え、
前記本体部のうち前記保持面とは反対側の面に凹部を形成するとともに、前記凹部にリブ部を設けたことを特徴とする基板保持装置。In a substrate holding device for holding a substrate,
A main body having a holding surface for holding the substrate;
A substrate holding apparatus, wherein a concave portion is formed on a surface of the main body portion opposite to the holding surface, and a rib portion is provided in the concave portion.
前記リブ部に、前記吸着孔に接続する流路が設けられていることを特徴とする請求項1〜3のいずれか一項記載の基板保持装置。An adsorption hole for adsorbing the substrate to the holding surface is formed at a predetermined position on the holding surface,
The substrate holding apparatus according to claim 1, wherein a flow path connected to the suction hole is provided in the rib portion.
前記基板保持装置は、請求項1〜請求項11のいずれか一項記載の基板保持装置により構成されていることを特徴とするステージ装置。In a stage device that can move while supporting a substrate holding device for holding a substrate,
A stage apparatus comprising the substrate holding apparatus according to any one of claims 1 to 11.
前記基板ステージは、請求項12記載のステージ装置により構成されていることを特徴とする露光装置。In an exposure apparatus that exposes a pattern to a substrate held on a substrate stage,
The exposure apparatus according to claim 12, wherein the substrate stage comprises the stage apparatus according to claim 12.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003174934A JP2005012009A (en) | 2003-06-19 | 2003-06-19 | Substrate holder, stage apparatus, and exposure apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003174934A JP2005012009A (en) | 2003-06-19 | 2003-06-19 | Substrate holder, stage apparatus, and exposure apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005012009A true JP2005012009A (en) | 2005-01-13 |
Family
ID=34098276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003174934A Pending JP2005012009A (en) | 2003-06-19 | 2003-06-19 | Substrate holder, stage apparatus, and exposure apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005012009A (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007158077A (en) * | 2005-12-06 | 2007-06-21 | Dainippon Screen Mfg Co Ltd | Substrate heat treatment apparatus |
| JP2009282110A (en) * | 2008-05-20 | 2009-12-03 | Hitachi High-Technologies Corp | Proximity exposure device, chuck height adjusting method of proximity exposure device and method of manufacturing panel substrate for display |
| KR101258868B1 (en) * | 2011-06-02 | 2013-04-29 | 아페리오(주) | Method and apparatus for photolithography of the chip-embedded printed circuit board |
| JP2014060447A (en) * | 2005-12-30 | 2014-04-03 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| JP2014093384A (en) * | 2012-11-02 | 2014-05-19 | Disco Abrasive Syst Ltd | Chuck table |
| JP2014143367A (en) * | 2013-01-25 | 2014-08-07 | Tokyo Electron Ltd | Bonding device and bonding system |
| JP2016537663A (en) * | 2013-09-27 | 2016-12-01 | エーエスエムエル ネザーランズ ビー.ブイ. | Support table for lithographic apparatus, lithographic apparatus and device manufacturing method |
| WO2018062508A1 (en) * | 2016-09-30 | 2018-04-05 | 株式会社ニコン | Object holding device, exposure device, flat-panel display manufacturing method, device manufacturing method, and object holding method |
| CN110268331A (en) * | 2017-02-10 | 2019-09-20 | Asml控股股份有限公司 | Mask chucking device |
| JP2021043450A (en) * | 2016-02-08 | 2021-03-18 | エーエスエムエル ネザーランズ ビー.ブイ. | Lithographic apparatus, method for unloading substrate and method for loading substrate |
| JP2023071662A (en) * | 2017-06-06 | 2023-05-23 | エーエスエムエル ネザーランズ ビー.ブイ. | Method of unloading object from support table |
-
2003
- 2003-06-19 JP JP2003174934A patent/JP2005012009A/en active Pending
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007158077A (en) * | 2005-12-06 | 2007-06-21 | Dainippon Screen Mfg Co Ltd | Substrate heat treatment apparatus |
| US10761433B2 (en) | 2005-12-30 | 2020-09-01 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP2014060447A (en) * | 2005-12-30 | 2014-04-03 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| US9436096B2 (en) | 2005-12-30 | 2016-09-06 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US11669021B2 (en) | 2005-12-30 | 2023-06-06 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US9851644B2 (en) | 2005-12-30 | 2017-12-26 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US11275316B2 (en) | 2005-12-30 | 2022-03-15 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US10222711B2 (en) | 2005-12-30 | 2019-03-05 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP2009282110A (en) * | 2008-05-20 | 2009-12-03 | Hitachi High-Technologies Corp | Proximity exposure device, chuck height adjusting method of proximity exposure device and method of manufacturing panel substrate for display |
| KR101258868B1 (en) * | 2011-06-02 | 2013-04-29 | 아페리오(주) | Method and apparatus for photolithography of the chip-embedded printed circuit board |
| JP2014093384A (en) * | 2012-11-02 | 2014-05-19 | Disco Abrasive Syst Ltd | Chuck table |
| JP2014143367A (en) * | 2013-01-25 | 2014-08-07 | Tokyo Electron Ltd | Bonding device and bonding system |
| JP2016537663A (en) * | 2013-09-27 | 2016-12-01 | エーエスエムエル ネザーランズ ビー.ブイ. | Support table for lithographic apparatus, lithographic apparatus and device manufacturing method |
| US9835957B2 (en) | 2013-09-27 | 2017-12-05 | Asml Netherlands B.V. | Support table for a lithographic apparatus, lithographic apparatus and device manufacturing method |
| JP2021043450A (en) * | 2016-02-08 | 2021-03-18 | エーエスエムエル ネザーランズ ビー.ブイ. | Lithographic apparatus, method for unloading substrate and method for loading substrate |
| US11664264B2 (en) | 2016-02-08 | 2023-05-30 | Asml Netherlands B.V. | Lithographic apparatus, method for unloading a substrate and method for loading a substrate |
| JP2022177165A (en) * | 2016-02-08 | 2022-11-30 | エーエスエムエル ネザーランズ ビー.ブイ. | Lithographic apparatus, method for unloading substrate, and method for loading substrate |
| TWI760371B (en) * | 2016-09-30 | 2022-04-11 | 日商尼康股份有限公司 | Object holding device, exposure apparatus, manufacturing method of flat panel display, device manufacturing method, and object holding method |
| KR102306204B1 (en) * | 2016-09-30 | 2021-09-28 | 가부시키가이샤 니콘 | An object holding apparatus, an exposure apparatus, a manufacturing method of a flat panel display, a device manufacturing method, and an object holding method |
| CN109791369B (en) * | 2016-09-30 | 2022-01-14 | 株式会社尼康 | Object holding apparatus, exposure apparatus, method for manufacturing flat panel display, method for manufacturing device, and object holding method |
| WO2018062508A1 (en) * | 2016-09-30 | 2018-04-05 | 株式会社ニコン | Object holding device, exposure device, flat-panel display manufacturing method, device manufacturing method, and object holding method |
| CN109791369A (en) * | 2016-09-30 | 2019-05-21 | 株式会社尼康 | Object holding apparatus, exposure device, the manufacturing method of flat-panel monitor, manufacturing method and object keeping method |
| KR20190050828A (en) * | 2016-09-30 | 2019-05-13 | 가부시키가이샤 니콘 | An object holding apparatus, an exposure apparatus, a method of manufacturing a flat panel display, a device manufacturing method, and an object holding method |
| JPWO2018062508A1 (en) * | 2016-09-30 | 2019-07-04 | 株式会社ニコン | Object holding apparatus, exposure apparatus, method of manufacturing flat panel display, device manufacturing method, and object holding method |
| CN110268331B (en) * | 2017-02-10 | 2021-12-07 | Asml控股股份有限公司 | Mask plate clamping equipment |
| CN110268331A (en) * | 2017-02-10 | 2019-09-20 | Asml控股股份有限公司 | Mask chucking device |
| JP2023071662A (en) * | 2017-06-06 | 2023-05-23 | エーエスエムエル ネザーランズ ビー.ブイ. | Method of unloading object from support table |
| JP7483071B2 (en) | 2017-06-06 | 2024-05-14 | エーエスエムエル ネザーランズ ビー.ブイ. | How to Unload an Object from a Support Table |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6981458B2 (en) | Conveyance system, exposure equipment, transfer method, exposure method and device manufacturing method | |
| JP6855010B2 (en) | Substrate holding device, exposure device and device manufacturing method | |
| TW575937B (en) | Substrate holding apparatus, exposure apparatus, and method of manufacturing device | |
| JP4968076B2 (en) | Substrate holding apparatus, exposure apparatus, exposure method, and device manufacturing method | |
| JP2011166180A (en) | Substrate holding apparatus, exposure apparatus, and device fabrication method | |
| JP2007142238A (en) | Wafer holder, exposure apparatus and method for manufacturing device | |
| JP2014003259A (en) | Load method, substrate holding apparatus, and exposure apparatus | |
| JP2005012009A (en) | Substrate holder, stage apparatus, and exposure apparatus | |
| JP2006054289A (en) | Substrate holder, stage apparatus, exposure apparatus, and device manufacturing method | |
| JP4348734B2 (en) | Substrate holding apparatus, exposure apparatus, and device manufacturing method | |
| JP2007214336A (en) | Retaining device, manufacturing method therefor retaining method, stage device, and exposure device | |
| JP2005044882A (en) | Transporting device and aligner | |
| WO2007139017A1 (en) | Liquid recovery member, substrate holding member, exposure apparatus and device manufacturing method | |
| JP2012238776A (en) | Object replacing system, exposure device, manufacturing method of flat panel display, manufacturing method of device, and object replacing method | |
| JP2004087833A (en) | Substrate holding device | |
| JP2019032552A (en) | Exposure equipment, exposure method, device manufacturing method | |
| JP6086292B2 (en) | Substrate holding apparatus and exposure apparatus | |
| JP2010016111A (en) | Exposure apparatus and device manufacturing method | |
| JP2014036114A (en) | Exposure device, exposure method, and device manufacturing method | |
| JP6418281B2 (en) | Exposure equipment | |
| JP2006080357A (en) | Substrate temperature adjusting unit, stage unit, exposure unit, and manufacturing method of device | |
| JP2020030434A (en) | Stage apparatus, exposure apparatus and method for manufacturing device | |
| JP2009277677A (en) | Exposure apparatus, substrate carrying method and device manufacturing method | |
| JP2014093456A (en) | Exposure apparatus, exposure method, and device manufacturing method | |
| JP2011242627A (en) | Object supporting apparatus, object conveyance system, exposure apparatus, device manufacturing method, and method of manufacturing flat panel display |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081118 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090331 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090529 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090908 |