JP2004504586A - 物体の幾何学的形状の無接触測定のための方法 - Google Patents
物体の幾何学的形状の無接触測定のための方法 Download PDFInfo
- Publication number
- JP2004504586A JP2004504586A JP2002512626A JP2002512626A JP2004504586A JP 2004504586 A JP2004504586 A JP 2004504586A JP 2002512626 A JP2002512626 A JP 2002512626A JP 2002512626 A JP2002512626 A JP 2002512626A JP 2004504586 A JP2004504586 A JP 2004504586A
- Authority
- JP
- Japan
- Prior art keywords
- laser
- tracer
- coordinate measuring
- measuring machine
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
- G01B11/005—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines
- G01B11/007—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines feeler heads therefor
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
- Other Investigation Or Analysis Of Materials By Electrical Means (AREA)
Abstract
【選択図】図1
Description
【発明の属する技術分野】
本発明は光学系を経て物体の測定点にレーザビームを結像し、測定点から反射又は散乱される光を検出器で検出する座標測定機による物体の幾何学的形状、例えば表面の形状等を無接触で測定するための方法に関する。
【0002】
【従来の技術及び発明が解決しようとする課題】
オプロエレクトロニクス式距離測定のために、例えばレーザ三角測量の原理又はレーザ・オートフォーカス法を利用することができる。後者の場合は、例えば赤外線レーザダイオードのビームをコリメータレンズにより平行に配向し、追従可能な走査レンズにより物体又は被検体の表面に焦点合わせする。そこから反射又は散乱した光は走査レンズとコリメータレンズを逆方向に通過する。ビーム分割プリズムがコリメータレンズによって新たに集束されたこのビームの一部を焦点検出器へ導く。焦点が焦点検出器の平面にあれば焦点検出器のセグメントの間で対称になるから、2つのセグメントが同じ信号を電子解析装置へ送る。
【0003】
ところが焦点が焦点検出器の平面の前方にあれば、光は不鮮明な半散乱円の形で焦点検出器のおおむね一方のセグメントにだけ入射する。逆に焦点が焦点検出器の平面の後方にあれば、放射の重心が他方のセグメントに移る。次に焦点検出器のセグメントの信号から走査レンズの追従のための制御信号が生じる。走査レンズが常に被検体表面に焦点合わせされているように、可動コイル形モータで走査レンズを追従させることができる。換言すれば、レンズは被検体の輪郭に追従するのである。そこで垂直運動が変位センサ、例えば誘導形センサにより測定信号として記録される。被検体表面の様々な反射能が測定結果に影響しないように、第2の検出器によって強度測定を行うことができ、それによって焦点検出器の信号が正規化される。
【0004】
検出装置による上記のビーム調節法のほかに、例えば光路の半分を光学ナイフエッジで遮蔽するフーコーのナイフエッジの原理を応用することもできる。ビームが焦点検出器の平面の前方又は後方のいずれで物体に入射するかによって、反射される測定光の左側又は右側部分が検出器、例えばダブルホトダイオードに結像される。
【0005】
ナイフエッジの代わりに、1個のスプリットプリズムと2組のホトダイオード対の組合せを使用することもできる。1個の円柱レンズと1組のホトダイオード対の組合せを使用することも可能である。但しこの点については適切な測定法を参照されたい。
【0006】
オートフォーカス方式による公知の距離測定法は固定光学系を有し、小さな測定範囲で高い分解能を望むか、大きな測定範囲で小さな分解能を望むかを選ばねばならない。作動距離自体は明らかに一定である。
【0007】
座標測定装置による物体の幾何学的形状の検出のための配列方法が国際公開公報WO99/53268(ドイツ特許公開DE19816270A1)で周知である。その場合、ズームレンズを備えた光学系が利用され、そのレンズ群の位置が倍率及び物体の距離に関してそれぞれ別個にモータ駆動により移動させられる。
【0008】
適当な方法によって物体の幾何学的形状の測定のために大きな利用範囲が可能になる。その場合、幾何学的形状に応じて発生される光が僅かな費用で検出され、検出器に映写される。
【0009】
映画撮影機用の可変焦点距離レンズのための制御装置がドイツ特許公開DE2611639A1に記載されている。
【0010】
ドイツ特許DE3613209C2はビームスプリッタを備えた複数個の検出系を有する光学式表面輪郭測定装置に関するものである。
【0011】
ドイツ特許公開DE19747027A1による多重センサ形トレーシング装置では触覚トレーサ及びビデオトレーサのほかに、レーザトレーサが設けられている。その場合トレーサ系は同じ測定点を検出するように構成されている。
【0012】
本発明の根底にあるのは、簡単な処置で使用範囲を拡張できるように、冒頭に挙げた種類の方法を改良する課題である。また上記の方法と、座標測定機で周知の他の従来慣用の光学的方法とを組み合わせる可能性を示すことも本発明の課題である。
【0013】
【課題を解決するための手段及び発明の効果】
本発明によれば、上記課題はおおむね次のようにして解決される。即ち光学系がズームレンズを具備し、そのレンズ群の位置が作動距離ないしは分解能ないしは測定範囲に関してそれぞれ互いに別個にモータ駆動により調整されるのである。
【0014】
こうしてレンズ群の位置を作動距離ないしは作動距離と分解能ないしは測定範囲ないしは作動距離と測定範囲と分解能に関してそれぞれ互いに別個にモータ駆動により調整することができる。
【0015】
公知のレーザ距離測定法と異なり、ズームレンズのレンズ群を互いに別個に調整できるので、作動距離を変える一方で分解能を改善し、測定範囲を拡大することが可能である。これに対して先行技術では分解能の品質と測定範囲の大きさの間で折衷案を選ばねばならない。
【0016】
特に本発明により以下の技術的事項が実現可能になる。
−ズームレンズによるレーザ作動距離の調整及び座標測定装置による走査
−直接にズームレンズによるレーザ作動距離及び制御プロセスの変更
−映像処理光路と組み合わせて1つの光路とすること
−回り継手による映像処理及びレーザのためのコンパクトな増設ユニット
−ビーム分割ミラーによる明視野−入射光の補助的組み入れ
−ビームスプリッタ一式を持たない映像処理光路への色選択性ビームスプリッタによる又は代案として「細幅ミラー」によるレーザビームの取り込み
−ファイバトレーサの第3の座標の測定のためのレーザの使用
−ファイバトレーサの球体の自家照明の発生
【0017】
本発明によれば、作動距離可変のズームレンズが光斑、光点又はコントラスト変化の形成又は検出のために使用されるだけでなく、ズームレンズは同時にマーク、エッジ、光点、特にフーコーのナイフエッジの投影のために使用される。このようにレーザ距離測定法に必要なレーザビームの投影のため、また物体上の合成像の映写のために、作動距離、分解能、測定範囲及び倍率等の光学的パラメータを同時に又は一様に変更することが本発明に基づき可能である。又、本発明によれば作動距離が異なる場合に先行技術のように2つの光学系が必要ではなく、本発明に基づき設けられるズームレンズによって実現が可能である。
【0018】
本発明に基づきレーザセンサの様々な作動距離及びそれに伴う様々な測定範囲及び精度が利用者に提供される。こうして測定範囲は大きいが測定結果の精度が劣る高速の走査速度の操作モードと、測定範囲が小さいが結果が高精度である低速の走査速度の操作モードとを選択的に利用することができる。
【0019】
座標測定機による測定用トレーサの通常の走査動作では、測定用トレーサがその測定信号に従って座標測定機の機械的軸により再調整される。本発明によって補足的に得られる可変作動距離の機能に基づき、座標軸を動かさなくても物体の走査を行うことができる。センサの変位に応じて作動距離だけが変更される。測定結果は作動距離の読取りによって、読取り結果と座標測定機の座標軸との組合せで得られる。
【0020】
別のビームスプリッタを結像光路に入れれば、本発明の学説に基づき測定物の距離の迅速な測定と像平面の寸法測定のための映像処理の可能性とを組み合わせることができる。各モードで場合によって起こる映像処理光路又はレーザ光路の強度損失を回避するために、ビームスプリッタ例えばミラーを光路の外へ転回又は傾倒できるように機械的に構成することができる。また色選択性フィルタによって2つの光路を分離することも可能である。
【0021】
また本発明が開発した測定法及び応用分野の柔軟性を高めるために、本発明の別の実施形態においては、センサ機能一式を座標測定機のヒンジ又は回り継手に配設することが提案される。
【0022】
開示内容を引例として挙げる国際公開公報WO99/53268で明らかなように、使用するレーザ光を光触覚トレーサのプローブの自家照明の発生のために利用することも可能である。
【0023】
さらに国際公開公報WO99/53268に記載されているように、座標測定機のZ方向の光触覚トレーサの位置を本発明のレーザ距離センサによって決定することができる。
【0024】
これとは独立に、本発明に係る提案は光触覚トレーサ及びトレーサ延長部と、物体の測定のためにトレーサから出て物体と接触させられるプローブと、場合によっては標的マークと、平面(座標測定機のx−y軸)でのプローブないしは標的マークの位置決定のための光学センサとを具備する座標測定機による物体の幾何学的形状、例えば表面の測定方法において、平面に対して垂直な方向(座標測定機のy軸)のプローブないしは標的マークの位置をレーザ距離センサによって決定することを特徴とする方法を提案する。
【0025】
レーザ距離センサの作動方向を交換可能な補助ミラーにより選択的に変更することもできる。
【0026】
発明のその他の細部、利点及び特徴は特許請求の範囲及び特許請求の範囲に見られる特徴のみならず、図面に基づいて説明される以下の発明の実施の形態によっても明らかである。
【0027】
【発明の実施の形態】
本発明によればレーザビームによる物体の幾何学的形状、例えば表面の無接触測定のための座標測定機が提案される。レーザビームは光学系を経て物体の測定点に結像され、測定点から反射された光が検出器又はセンサによって検出される。本発明に基づきこのために作動距離可変のズームレンズが光斑、光点又はコントラスト変化の結像又は検出のために使用されるだけでなく、同時にズームレンズはマーク、エッジ、光点、特にフーコーのナイフエッジの投影のために使用される。こうしてレーザ距離測定法に必要なレーザビームの投影のため、また物体上の合成像の映写のために作動距離、分解能、測定範囲及び倍率等の光学的パラメータを同時かつ一様に変更することが可能である。
【0028】
レーザビームを種々異なる焦平面6及び7に結像するために、レーザ1のビームがプリズム2及び半透明ミラー3を経てズームレンズ5に導かれることが図1にごく原理的に示されている。反射された光は半透明ミラー3を通過して、別のプリズム2を経て例えば差動ホトダイオード形のセンサ4に導かれる。
【0029】
図1がフーコーの原理によるレーザセンサの例を示すが、ズームレンズ5はミラーを経て光路に持ち込まれるフーコーのナイフエッジの像の投影にも、また測定物の合成像のオプトエレクトロニクス式センサ4への結像にも利用される。センサ4は前述のように本例では差動ホトダイオードとして形成されている。ズームレンズ5によって作動距離及び分解能ないしは測定範囲を互いに別個に調整することができるから、単一のズームレンズしか必要でない。先行技術の方法によれば、可変作動距離でフーコーの原理を実現するには2個のズームレンズが必要であった。
【0030】
その結果さまざまな作動距離とそれに伴うさまざまな測定範囲及び精度が利用者に提供される。こうして図2で明らかなように、図2の(b)及び(d)で示すごとく測定範囲(捕捉範囲)は大きいが測定結果の精度が劣る高速の走査速度の操作モードと、図2の(a)及び(c)で示すごとく測定範囲が小さいが結果が高精度である低速の走査速度の操作モードを選択的に利用することができる。ここで1はズームレンズ、2は作動距離、3は測定範囲を原理的に示す。図2の表が明らかにしているように、倍率、作動距離及び測定範囲に応じてさまざまな精度が生じる(↑=大きい、ないしはより大きい、↓=小さい、少ない、ないしはより小さい、より少ない)。
【0031】
先行技術によれば座標測定機による測定用トレーサの通常の走査動作で、測定用トレーサは測定信号に従って座標測定機の機械的軸により再調整される。本発明に基づき補足的に得られる可変作動距離の機能によって、座標軸を動かさないでも物体の走査を行うことができる。センサの変位に応じて作動距離だけが変更される。図3の(a)が明らかにしているように、測定結果は作動距離の読取りにより、座標測定機の読取り結果と組み合わせて得られる。ところが本発明に係るズームレンズがなければ、図3の(b)で明らかなように固設された距離センサに基づき極めて限られた測定範囲が生じることになる。
【0032】
図4により別のビームスプリッタ4を結像光路に入れることによって、測定物の距離の本発明に基づく迅速な測定と、像平面の寸法測定のための映像処理の可能性とを組み合わせることができる。これによって各作動モードで映像処理光路又はレーザ光路に起こる強度損失を回避するために、ビームスプリッタ、例えばミラーを光路の外へ転回又は傾倒できるように機械的に構成することができる。色選択性フィルタによって光路を分離することも可能である。
【0033】
また上記の解決策の柔軟性を高めるために、図5でごく原理的に示すように、センサ機構全体を座標測定機のヒンジ又は回り継手に配設することが可能である。
【0034】
一方、図6は本発明に基づき構成されたレーザ距離センサを、レーザ距離センサの光軸(座標測定機のZ方向)方向に沿う機械的プローブ又は走査部材の位置の測定のために使用できることをごく原理的に示す。その場合、明確に引例として挙げられる国際公開公報WO99/53268で説明されるように、走査要素としてファイバトレーサないしブローブが選ばれる。この点については当該の開示を参照されたい。こうして像平面内の映像処理系の測定結果と組み合わせて、走査部材の位置の三次元決定が得られる。このために球形の走査部材はレーザ像の発生のための特殊な面を備えることができる。
【0035】
レーザ光によって生じるファイバトレーサの球体の自家照明効果は、同時に映像処理システムによる球体の位置の検出のために利用することもできる。
【0036】
Z方向即ち平面に垂直な方向の位置決定、即ち光学式センサ、例えば映像処理センサ、位置感受性表面センサ又はビデオカメラによるトレーサの位置決定は、もちろん在来のレーザ距離センサで行うこともできる。この点においても本発明の独特の提案が存在する。
【0037】
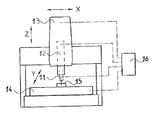
図7に本発明に係る方法の実現のための実施形態を示す。調整可能なレンズ群を備えたレーザ距離センサ11が座標測定装置のセンタースリーブ12(Z軸)に固定されている。このセンタースリーブ12はスライド13によりx方向に移動することができる。測定物15も測定台14によりy方向に移動することができる。図示の座標測定装置のすべての軸はモータで駆動され、制御システム16により制御される。レーザ距離センサ11の出力信号は制御システム16で、レーザ距離センサ11と材料表面の間隔が常に一定に保たれるように処理される。こうしてx軸又はy軸のいずれか1つで移動することによって、測定物15をカバーする走査行程が得られる。レーザ距離センサ11のレンズ群の位置を調整することによって走査時のレーザ距離センサ11の作動距離を調整することができる。
【図面の簡単な説明】
【図1】物体の表面の測定のためのレーザセンサの原理図である。
【図2】(a)、(b)、(c)、(d)はそれぞれ図1のレーザセンサでカバーできる測定範囲の原理図を示すものである。
【図3】(a)及び(b)はそれぞれ本発明のレーザセンサでカバーできる測定範囲と先行技術によるレーザセンサの測定範囲との比較を示すものである。
【図4】補助ビームスプリッタを備えた図1のレーザセンサの図である。
【図5】レーザセンサを備えたヒンジ又は回り継手の図である。
【図6】レーザセンサ及びファイバトレーサを備えたヒンジ又は回り継手の図である。
【図7】座標測定機の原理図である。
Claims (12)
- 光学系を経て物体の測定点にレーザビームを結像し、測定点から反射又は散乱される光を検出器で検出する座標測定機による物体の幾何学的形状例えば表面の無接触測定のための方法において、光学系がズームレンズを具備し、そのレンズ群の位置が作動距離ないしは分解能ないしは測定区域に関して互いに別個に電動調整されることを特徴とする方法。
- 検出器又はセンサの出力信号が座標測定機の走査動作を制御することを特徴とする請求項1に記載の方法。
- 走査動作の実施のために光学系の作動距離を制御操作により適宜に変更することを特徴とする請求項1又は2に記載の方法。
- 結像光路から誘導される映像処理光路を補助的に発生することを特徴とする上記請求項の少なくとも1つに記載の方法。
- レーザ、検出器ないしは光学系を旋回装置により立体的に位置決めすることを特徴とする上記請求項の少なくとも1つに記載の方法。
- 映像処理光路とレーザビーム光路の間のビームスプリッタとして色選択性フィルタを使用することを特徴とする上記請求項の少なくとも1つに記載の方法。
- 映像処理光路とレーザビーム光路の間のビームスプリッタとして傾斜又は回転ミラーを使用することを特徴とする上記請求項の少なくとも1つに記載の方法。
- レーザ、光学系及び検出器からなるレーザ距離センサによって光触覚トレーサの第3の座標(座標測定機のZ軸)を決定することを特徴とする上記請求項の少なくとも1つに記載の方法。
- 光触覚トレーサ又はそのプローブの自家照明の発生のためにレーザ光を使用することを特徴とする上記請求項の少なくとも1つに記載の方法。
- レーザ距離センサの作動方向を交換可能な補助ミラーにより選択的に変更することができることを特徴とする上記請求項の少なくとも1つに記載の方法。
- 光触覚トレーサ及びトレーサ延長部と、物体の測定のためにトレーサから出て物体と接触するプローブと、場合によっては標的マークと、平面(座標測定機のx−y軸)でのプローブないしは標的マークの位置決定のための光学センサとを具備する座標測定機による物体の幾何学的形状例えば表面の測定方法において、平面に対して垂直な方向(座標測定機のy軸)のプローブないしは標的マークの位置をレーザ距離センサによって決定することを特徴とする方法。
- レーザ距離センサが生じるレーザ光によって光触覚トレーサ又はそのプローブないしは標的マークの自家照明を発生することを特徴とする請求項11に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10034242 | 2000-07-13 | ||
| DE10049303A DE10049303A1 (de) | 2000-07-13 | 2000-10-04 | Verfahren zum berührungslosen Messen von Geometrien von Gegenständen |
| PCT/EP2001/008088 WO2002006765A1 (de) | 2000-07-13 | 2001-07-13 | Verfahren zum berührungslosen messen von geometrien von gegenständen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004504586A true JP2004504586A (ja) | 2004-02-12 |
| JP2004504586A5 JP2004504586A5 (ja) | 2005-02-03 |
Family
ID=26006385
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002512626A Pending JP2004504586A (ja) | 2000-07-13 | 2001-07-13 | 物体の幾何学的形状の無接触測定のための方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6856381B2 (ja) |
| EP (1) | EP1299691B1 (ja) |
| JP (1) | JP2004504586A (ja) |
| AT (1) | ATE284528T1 (ja) |
| AU (1) | AU2001285839A1 (ja) |
| WO (1) | WO2002006765A1 (ja) |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE50205454D1 (de) * | 2001-07-16 | 2006-02-02 | Werth Messtechnik Gmbh | Verfahren zur messung von oberflächeneigenschaften sowie koordinatenmessgerät |
| DE10361870B4 (de) * | 2003-12-29 | 2006-05-04 | Faro Technologies Inc., Lake Mary | Laserscanner und Verfahren zum optischen Abtasten und Vermessen einer Umgebung des Laserscanners |
| US8711365B2 (en) | 2004-12-16 | 2014-04-29 | Werth Messtechnik Gmbh | Coordinate measuring device and method for measuring with a coordinate measuring device |
| WO2006063838A1 (de) * | 2004-12-16 | 2006-06-22 | Werth Messtechnik Gmbh | Koordinatenmessgerät sowie verfahren zum messen mit einem koordinatenmessgerät |
| NL1028920C2 (nl) * | 2005-04-29 | 2006-10-31 | Bosch Gmbh Robert | Elektrisch gereedschap voor het bewerken van een object. |
| DE202006005643U1 (de) * | 2006-03-31 | 2006-07-06 | Faro Technologies Inc., Lake Mary | Vorrichtung zum dreidimensionalen Erfassen eines Raumbereichs |
| US20080100850A1 (en) * | 2006-10-31 | 2008-05-01 | Mitutoyo Corporation | Surface height and focus sensor |
| US7728961B2 (en) * | 2006-10-31 | 2010-06-01 | Mitutoyo Coporation | Surface height and focus sensor |
| DE102007024197B4 (de) * | 2007-05-24 | 2017-01-05 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Formmessung von Freiform-Flächen |
| US7723657B2 (en) * | 2007-11-16 | 2010-05-25 | Mitutoyo Corporation | Focus detection apparatus having extended detection range |
| EP2194357A1 (de) | 2008-12-03 | 2010-06-09 | Leica Geosystems AG | Optisches Sensorelement für eine Messmaschine, und messmaschinenseitiges Kupplungselement hierfür |
| DE102009010465B3 (de) * | 2009-02-13 | 2010-05-27 | Faro Technologies, Inc., Lake Mary | Laserscanner |
| DE102009015920B4 (de) | 2009-03-25 | 2014-11-20 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9551575B2 (en) | 2009-03-25 | 2017-01-24 | Faro Technologies, Inc. | Laser scanner having a multi-color light source and real-time color receiver |
| DE102009035336B3 (de) | 2009-07-22 | 2010-11-18 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102009035337A1 (de) | 2009-07-22 | 2011-01-27 | Faro Technologies, Inc., Lake Mary | Verfahren zum optischen Abtasten und Vermessen eines Objekts |
| DE102009055988B3 (de) | 2009-11-20 | 2011-03-17 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102009057101A1 (de) | 2009-11-20 | 2011-05-26 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9113023B2 (en) | 2009-11-20 | 2015-08-18 | Faro Technologies, Inc. | Three-dimensional scanner with spectroscopic energy detector |
| US9529083B2 (en) | 2009-11-20 | 2016-12-27 | Faro Technologies, Inc. | Three-dimensional scanner with enhanced spectroscopic energy detector |
| DE102009055989B4 (de) | 2009-11-20 | 2017-02-16 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9210288B2 (en) | 2009-11-20 | 2015-12-08 | Faro Technologies, Inc. | Three-dimensional scanner with dichroic beam splitters to capture a variety of signals |
| DE102010060833A1 (de) | 2009-11-26 | 2011-06-01 | Werth Messtechnik Gmbh | Verfahren und Anordnung zur taktil-optischen Bestimmung der Geometrie eines Messobjektes |
| US9163922B2 (en) | 2010-01-20 | 2015-10-20 | Faro Technologies, Inc. | Coordinate measurement machine with distance meter and camera to determine dimensions within camera images |
| US9607239B2 (en) | 2010-01-20 | 2017-03-28 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US9879976B2 (en) | 2010-01-20 | 2018-01-30 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine that uses a 2D camera to determine 3D coordinates of smoothly continuous edge features |
| US9628775B2 (en) | 2010-01-20 | 2017-04-18 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US8028432B2 (en) | 2010-01-20 | 2011-10-04 | Faro Technologies, Inc. | Mounting device for a coordinate measuring machine |
| DE102010020925B4 (de) | 2010-05-10 | 2014-02-27 | Faro Technologies, Inc. | Verfahren zum optischen Abtasten und Vermessen einer Umgebung |
| CN101915555A (zh) * | 2010-07-09 | 2010-12-15 | 上海理工大学 | 采用电控变焦透镜作为共焦显微系统轴向扫描方法 |
| DE102010032726B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032725B4 (de) | 2010-07-26 | 2012-04-26 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032723B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010033561B3 (de) | 2010-07-29 | 2011-12-15 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9168654B2 (en) | 2010-11-16 | 2015-10-27 | Faro Technologies, Inc. | Coordinate measuring machines with dual layer arm |
| KR101838329B1 (ko) * | 2011-05-20 | 2018-03-13 | 유니베르시타트 폴리테크니카 데 카탈루냐 | 표면을 비접촉 측정하기 위한 방법 및 디바이스 |
| DE102012100609A1 (de) | 2012-01-25 | 2013-07-25 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US8997362B2 (en) | 2012-07-17 | 2015-04-07 | Faro Technologies, Inc. | Portable articulated arm coordinate measuring machine with optical communications bus |
| DE102012107544B3 (de) | 2012-08-17 | 2013-05-23 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9074878B2 (en) | 2012-09-06 | 2015-07-07 | Faro Technologies, Inc. | Laser scanner |
| WO2014043461A1 (en) | 2012-09-14 | 2014-03-20 | Faro Technologies, Inc. | Laser scanner with dynamical adjustment of angular scan velocity |
| US9513107B2 (en) | 2012-10-05 | 2016-12-06 | Faro Technologies, Inc. | Registration calculation between three-dimensional (3D) scans based on two-dimensional (2D) scan data from a 3D scanner |
| US10067231B2 (en) | 2012-10-05 | 2018-09-04 | Faro Technologies, Inc. | Registration calculation of three-dimensional scanner data performed between scans based on measurements by two-dimensional scanner |
| DE102012109481A1 (de) | 2012-10-05 | 2014-04-10 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102014108353A1 (de) | 2013-06-13 | 2014-12-18 | Werth Messtechnik Gmbh | Verfahren und Vorrichtung zur Bestimmung von Geometrien an Messobjekten mittels eines kombinierten Sensorsystems |
| WO2015082683A2 (de) | 2013-12-06 | 2015-06-11 | Werth Messtechnik Gmbh | Vorrichtung und verfahren zur messung von werkstücken |
| DE102014117978A1 (de) | 2013-12-06 | 2015-06-11 | Werth Messtechnik Gmbh | Vorrichtung und Verfahren zur Messung von Werkstücken |
| DE102015122844A1 (de) | 2015-12-27 | 2017-06-29 | Faro Technologies, Inc. | 3D-Messvorrichtung mit Batteriepack |
| DE102017129221A1 (de) | 2017-01-23 | 2018-07-26 | Werth Messtechnik Gmbh | Verfahren und Vorrichtung zur Bestimmung von geometrischen Merkmalen an Werkstücken |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52114321A (en) * | 1976-03-19 | 1977-09-26 | Schneider Co Optische Werke | Objective lens control unit having variable focal length |
| JPH01503337A (ja) * | 1987-05-15 | 1989-11-09 | ヒューズ―ジェイブイシー・テクノロジー・コーポレーション | 液晶ライトバルブを用いたフルカラーの画像射影のための改良された光学系 |
| JPH06160036A (ja) * | 1992-11-18 | 1994-06-07 | Toyoda Mach Works Ltd | 光学的測定装置 |
| JPH06258239A (ja) * | 1993-03-09 | 1994-09-16 | Hitachi Ltd | 欠陥検出装置およびその方法 |
| JPH07504749A (ja) * | 1992-03-13 | 1995-05-25 | サーモマイクロスコープス コーポレーション | 走査型プローブ電子顕微鏡 |
| JPH07174536A (ja) * | 1993-12-20 | 1995-07-14 | Minolta Co Ltd | 3次元形状測定装置 |
| JPH07239217A (ja) * | 1994-02-28 | 1995-09-12 | Agency Of Ind Science & Technol | レーザ追尾式座標測定機 |
| JPH07248213A (ja) * | 1994-03-11 | 1995-09-26 | Nikon Corp | 三次元形状測定装置 |
| JPH08327332A (ja) * | 1995-05-30 | 1996-12-13 | Ando Electric Co Ltd | クリームはんだ膜厚測定装置 |
| JPH10160740A (ja) * | 1996-12-03 | 1998-06-19 | Olympus Optical Co Ltd | 走査型近接場光学顕微鏡 |
| WO1999053268A1 (de) * | 1998-04-11 | 1999-10-21 | Werth Messtechnik Gmbh | Verfahren und anordnung zur erfassung der geometrie von gegenständen mittels eines koordinatenmessgeräts |
| WO1999063301A1 (de) * | 1998-05-29 | 1999-12-09 | Werth Messtechnik Gmbh | Anordnung zur messung von strukturen eines objektes |
| JP2000162318A (ja) * | 1998-11-24 | 2000-06-16 | Hamamatsu Photonics Kk | 全方位距離検出装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2116872A5 (fr) * | 1970-12-10 | 1972-07-21 | Compteurs Comp D | Perfectionnements aux dispositifs palpeurs optiques |
| US3847485A (en) * | 1972-05-25 | 1974-11-12 | Zygo Corp | Optical noncontacting surface sensor for measuring distance and angle of a test surface |
| US4209252A (en) * | 1978-07-03 | 1980-06-24 | Arditty Herve J | Optical probe assembly for detecting the position of an object surface and method |
| FR2548796B1 (fr) * | 1983-07-08 | 1985-11-22 | Comp Generale Electricite | Dispositif optique pour determiner la position et la forme de la surface d'un objet |
| JPH0723844B2 (ja) * | 1985-03-27 | 1995-03-15 | オリンパス光学工業株式会社 | 表面形状測定器 |
| US4732485A (en) | 1985-04-17 | 1988-03-22 | Olympus Optical Co., Ltd. | Optical surface profile measuring device |
| DE4327250C5 (de) * | 1992-09-25 | 2008-11-20 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren zur Koordinatenmessung an Werkstücken |
| JP3843399B2 (ja) * | 1995-03-17 | 2006-11-08 | ヴエーベル,ハインツ,パウル | サブミクロメートル範囲における3次元構造を判定する方法及び装置 |
| DE19747027A1 (de) * | 1997-04-21 | 1998-10-22 | Wegu Messtechnik | Multisensor-Tasteinrichtung |
| DE19724739A1 (de) * | 1997-06-12 | 1998-12-17 | Werth Messtechnik Gmbh | Taster zur Messung geometrischer Strukturen |
| WO2003105075A1 (en) | 2002-06-07 | 2003-12-18 | Trustees Of Boston University | System and methods for product and document authentication |
-
2001
- 2001-07-13 AU AU2001285839A patent/AU2001285839A1/en not_active Abandoned
- 2001-07-13 US US10/311,349 patent/US6856381B2/en not_active Expired - Lifetime
- 2001-07-13 AT AT01965126T patent/ATE284528T1/de not_active IP Right Cessation
- 2001-07-13 WO PCT/EP2001/008088 patent/WO2002006765A1/de active IP Right Grant
- 2001-07-13 JP JP2002512626A patent/JP2004504586A/ja active Pending
- 2001-07-13 EP EP01965126A patent/EP1299691B1/de not_active Expired - Lifetime
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52114321A (en) * | 1976-03-19 | 1977-09-26 | Schneider Co Optische Werke | Objective lens control unit having variable focal length |
| JPH01503337A (ja) * | 1987-05-15 | 1989-11-09 | ヒューズ―ジェイブイシー・テクノロジー・コーポレーション | 液晶ライトバルブを用いたフルカラーの画像射影のための改良された光学系 |
| JPH07504749A (ja) * | 1992-03-13 | 1995-05-25 | サーモマイクロスコープス コーポレーション | 走査型プローブ電子顕微鏡 |
| JPH06160036A (ja) * | 1992-11-18 | 1994-06-07 | Toyoda Mach Works Ltd | 光学的測定装置 |
| JPH06258239A (ja) * | 1993-03-09 | 1994-09-16 | Hitachi Ltd | 欠陥検出装置およびその方法 |
| JPH07174536A (ja) * | 1993-12-20 | 1995-07-14 | Minolta Co Ltd | 3次元形状測定装置 |
| JPH07239217A (ja) * | 1994-02-28 | 1995-09-12 | Agency Of Ind Science & Technol | レーザ追尾式座標測定機 |
| JPH07248213A (ja) * | 1994-03-11 | 1995-09-26 | Nikon Corp | 三次元形状測定装置 |
| JPH08327332A (ja) * | 1995-05-30 | 1996-12-13 | Ando Electric Co Ltd | クリームはんだ膜厚測定装置 |
| JPH10160740A (ja) * | 1996-12-03 | 1998-06-19 | Olympus Optical Co Ltd | 走査型近接場光学顕微鏡 |
| WO1999053268A1 (de) * | 1998-04-11 | 1999-10-21 | Werth Messtechnik Gmbh | Verfahren und anordnung zur erfassung der geometrie von gegenständen mittels eines koordinatenmessgeräts |
| WO1999063301A1 (de) * | 1998-05-29 | 1999-12-09 | Werth Messtechnik Gmbh | Anordnung zur messung von strukturen eines objektes |
| JP2000162318A (ja) * | 1998-11-24 | 2000-06-16 | Hamamatsu Photonics Kk | 全方位距離検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2001285839A1 (en) | 2002-01-30 |
| EP1299691A1 (de) | 2003-04-09 |
| ATE284528T1 (de) | 2004-12-15 |
| US20030098967A1 (en) | 2003-05-29 |
| EP1299691B1 (de) | 2004-12-08 |
| US6856381B2 (en) | 2005-02-15 |
| WO2002006765A1 (de) | 2002-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004504586A (ja) | 物体の幾何学的形状の無接触測定のための方法 | |
| CN106338244B (zh) | 测量机和用于获取小规模3d信息的方法 | |
| US7227647B2 (en) | Method for measuring surface properties and co-ordinate measuring device | |
| EP1062478B1 (en) | Apparatus and method for optically measuring an object surface contour | |
| CN102818528B (zh) | 用于在增强景深的情形下检查物体的装置和方法 | |
| US20140043610A1 (en) | Apparatus for inspecting a measurement object with triangulation sensor | |
| US6927863B2 (en) | Apparatus for measuring a measurement object | |
| JP2002511573A (ja) | 座標測定器による物体の検出のための方法及び装置 | |
| KR940002356B1 (ko) | 비접촉자동초점위치맞춤방법 및 장치 | |
| KR101891182B1 (ko) | 자동초점 조절장치 | |
| KR100679643B1 (ko) | 자동초점 조절패턴을 채택하는 자동초점 조절장치 및그것을 사용한 자동초점 조절방법 | |
| US5432330A (en) | Two-stage detection noncontact positioning apparatus having a first light detector with a central slit | |
| US20060007449A1 (en) | Method for measuring a contour of a workpiece by scanning | |
| TW201819851A (zh) | 轉動角度量測裝置及加工系統 | |
| KR100240259B1 (ko) | 원통 렌즈와 레이저 스캐너를 이용한 3차원 측정장치 | |
| JP4788968B2 (ja) | 焦点面傾斜型共焦点表面形状計測装置 | |
| US20240068798A1 (en) | Measuring device and machining device | |
| CN110678290A (zh) | 用于反射或透射扫描仪射束的扫描头设备和方法、具有扫描头设备的扫描设备和扫描仪 | |
| JPH0469508A (ja) | 非接触式形状測定装置及び形状測定法 | |
| Christoph et al. | Coordinate Metrology | |
| US10656402B2 (en) | Three-dimensional infrared imaging of surfaces utilizing laser displacement sensors | |
| JPH0540821A (ja) | 三次元計測装置 | |
| FI88204B (fi) | Anordning foer bestaemning av ytformen av foeremaolet | |
| CN112880585A (zh) | 非接触形状测定装置 | |
| JP2004212333A (ja) | 非接触3次元測定方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110301 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110527 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110603 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110628 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110705 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110729 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111108 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120117 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120124 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120406 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120413 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120508 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120904 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120911 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121109 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121225 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130305 |