JP2004254406A - 超音波モータ及び超音波モータ付き電子機器 - Google Patents
超音波モータ及び超音波モータ付き電子機器 Download PDFInfo
- Publication number
- JP2004254406A JP2004254406A JP2003041500A JP2003041500A JP2004254406A JP 2004254406 A JP2004254406 A JP 2004254406A JP 2003041500 A JP2003041500 A JP 2003041500A JP 2003041500 A JP2003041500 A JP 2003041500A JP 2004254406 A JP2004254406 A JP 2004254406A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric element
- ultrasonic motor
- electrodes
- vibrating body
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【解決手段】圧電素子6を有する振動体と、圧電素子6の第一の面に設けられた複数の電極7b,7cと、圧電素子の第二の面の、前記複数の電極7b,7cと対向する位置に設けられた複数の電極7d,7eと、振動体に設けられた突起と、突起と接する移動体からなり、圧電素子の第一の面に設けられた複数の電極の中の一つおきの電極と、これと対向する第二の面に設けられた電極の間に信号を印加することで移動体を駆動する。
【選択図】 図17
Description
【発明の属する技術分野】
本発明は圧電素子を有する振動体の振動で移動体を摩擦駆動させる超音波モータ及び超音波モータを用いた電子機器にかかわり、特に駆動信号を印加する圧電素子の電極を選択することで移動方向を切り換える定在波型の超音波モータに関する。
【0002】
【従来の技術】
超音波モータは小型で高トルク等の優れた特徴を有することから様々な研究開発、並びに応用開発が進められている。そして最近では超音波モータの欠点であった複雑な駆動回路を改善する方法として超音波モータ自体を振動子として利用し、自励発振回路を構成する方法が採られている。この場合、電気的に単相信号で駆動が可能で正逆転方向の切り換えが可能な超音波モータが望まれ、この様な方式として同相駆動型超音波モータが提案されている。
【0003】
同相駆動型超音波モータの原理は振動体に励振する定在波の1/4波長間隔の電極を圧電素子に設け、一つおきの電極を短絡して二つの電極群を構成し、一方の電極群に信号を印加することで弾性体に設けた突起が定在波の腹に位置する振動モードと突起が節に位置する振動モードの二つが同時に励振され、二つの振動変位の合成により突起と接する移動体を駆動する。また他方の電極群に信号を印加すると二つの振動の位相関係が逆転し、移動体は逆方向に駆動される(例えば、非特許文献1参照。)。
【0004】
【非特許文献1】
T.Takano, Y.Tomikawa, and C.Kusakabe,: Same phase Drive−type Ultrasonic Motors Using Two Degenerate Bending Vibration Modes of a Disk, IEEE Trans. On UFFC, Vol.39,no.2, March 1992.
【0005】
【発明が解決しようとする課題】
しかしながら、本原理に基づいて駆動した場合、二つの振動の共振点が異なると共に、電気的にも共振のピークが二つ存在する。その為、自励発振回路を構成しようとした場合、発振ポイントが不安定となり、温度や負荷等の環境で変動する恐れがある。また、駆動回路の構成に関係なく若干の駆動周波数の変動でモータ特性が大きく変化するとともに、製造上のばらつきにより二つの共振点の位置もモータ個々で変動する為、得られるモータ特性もばらつきの大きなものになる恐れがあった。
【0006】
そこで本発明では、一つの振動モードだけで駆動出来るモータ、即ち電気的にもほぼ一つの共振ピークだけが存在する振動体構造を得ることにある。
【0007】
【課題を解決するための手段】
本発明は振動体の設計パラメータを最適化することにより突起が振動の腹と節の間に位置する振動モードを励振するようにする。これにより一つの振動モードで移動体を駆動できると共に、信号入力時に一つの固有モードだけが極めて強く励振され、電気的にもほぼ一つの共振ピークを有する振動体を実現する。以下具体的にその方法を説明する。
【0008】
本発明の第1の態様は、圧電素子を有する振動体と、前記圧電素子の第一の面に設けられた複数の電極と、前記圧電素子の第二の面の前記複数の電極と対向する位置に設けられ複数の電極と、前記振動体に設けられた突起と、前記突起と接する移動体からなり、前記圧電素子の第一の面に設けられた複数の電極の中の一つおきの電極と、これと対向する第二の面に設けられた電極の間に信号を印加することで移動体を駆動することを特徴とする超音波モータにある。これによれば突起が振動の腹と節の間に位置する振動モードが励振され、一つの振動モードで移動体を駆動できると共に、信号入力時に一つの固有モードだけが励振され、電気的にもほぼ一つの共振ピークを有する振動体となる。そして不用振動の影響を受けずに安定な自励振駆動が実現できるとともにモータ個々のばらつきが小さく出来る。
【0009】
本発明の第2の態様は、第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記圧電素子の第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体の振動により、前記突起と接する移動体を駆動する超音波モータにおいて、前記圧電素子と前記弾性体の厚みは前記振動体に励振される縮退モードである二つの振動の内、共振点が高い方の共振のアドミッタンスのピーク値を共振点が低いモードの共振のアドミッタンスのピーク値で割った値が0.1よりも低くなるように決められていることを特徴とする超音波モータにある。これによれば不用振動の影響を受けずに安定な自励振駆動が実現できるとともにモータ個々のばらつきが小さく出来る。
【0010】
本発明の第3の態様は、第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体の振動により、前記突起と接する移動体を駆動する超音波モータにおいて、前記圧電素子の厚みは、前記振動体の電気−機械結合係数のとる値が最大となる厚み近傍である様にすることを特徴とする超音波モータにある。これによれば不要モードの影響を殆ど受けず安定な自励振駆動が実現できると共に高出力な超音波モータが実現できる。
【0011】
本発明の第4の態様は、第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体の振動により、前記突起と接する移動体を駆動する超音波モータにおいて、前記圧電素子の厚みは、前記振動体の電気−機械結合係数のとる値が最大となる厚みよりも薄くなる様にすることを特徴とする超音波モータにある。これによれば不要モードの影響を全く受けず安定な自励振駆動が実現できると共に、高出力な超音波モータが実現できる。
【0012】
本発明の第5の態様は、第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体の振動により、前記突起と接する移動体を駆動する超音波モータにおいて、前記突起の高さは前記振動体に励振される縮退モードである二つの振動の内、共振点が高い方の共振のアドミッタンスのピーク値を共振点が低いモードの共振のアドミッタンスのピーク値で割った値が0.05よりも低くなるように決めることを特徴とする超音波モータにある。これによれば不用振動の影響を受けずに安定な自励振駆動が実現できると共に、高出力な超音波モータが実現できる。
【0013】
本発明の第6の態様は、圧電素子を有する振動体と、前記振動体に設けられた突起と、前記突起と接する移動体からなり、前記振動体の屈曲振動により前記突起と接する移動体を駆動する超音波モータにおいて、前記屈曲振動の波数と同じ波数を有する前記振動体の面内振動の固有振動数が前記屈曲振動の固有振動数近傍に来ないように前記振動体の厚みを決めることを特徴とする超音波モータにある。これによれば不用振動の影響を受けずに安定な自励振駆動が実現できる。
【0014】
本発明の第7の態様は、第1から第6のいずれかの態様における超音波モータと増幅回路とで自励発振回路を構成し、前記移動体を駆動することを特徴とする超音波モータにある。これによれば小型で簡易な駆動回路でしかも安定な駆動が出来る。
【0015】
本発明の第8の態様は、第1から第7の何れかの態様における超音波モータを備えた電子機器とすることを特徴とする超音波モータ付き電子機器にある。これによれば小型、低消費電力でかつ性能のばらつきの少ない電子機器が実現できる。
【0016】
【発明の実施の形態】
以下図1から図19を参照して本発明を適用した実施の形態を詳細に説明する。
【0017】
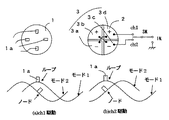
まず始めに本発明の超音波モータの構成、原理について説明する。図1に示す様に円板状の弾性体1の下面には圧電素子2が接着され振動体を構成している。圧電素子2の弾性体1との接着面にはほぼ前面に渡って図示しない共通電極が設けられている。圧電素子2の他方の面には励振する屈曲振動の1/4波長間隔で分極領域が決められ図中+、−の方向に分極処理されている。そして、各分極領域の上には電極3が設けられており一つおきの電極を短絡して二つの電極群を構成する。圧電素子2の各電極3a、3b、3c、3dの境界に相当するの弾性体1の部分には突起1aが設けられている。
【0018】
従来例で示した同相駆動型超音波モータの駆動原理に基づくと、一つの電極群と共通電極との間に駆動信号を印加する(ch1駆動)と突起1aが腹に位置するモード1と、突起1aが節に位置するモード2が同時に励振され、二つの振動モードの合成変位で図示しない移動体は駆動される。ここで、二つの振動モードの共振点は異なるため共振のピークは二つ現れる。図2に二つの共振点付近の振動体の周波数−アドミッタンスの関係を示す。この様な特性を有する振動体では安定な自励振駆動が難しい。
【0019】
しかしながら同じ構成の振動体であっても設計パラメータを最適化することにより一つの振動モードのみで駆動できるようになる。即ち突起1aが腹と節の間に位置するモードを固有モードに持つ様になる。図3に示す様に(a)(ch1駆動)と(b)(ch2駆動)とでは上昇した突起1aの傾く方向が反対となるため移動体4の移動方向も反対になる。また、本振動体の周波数−アドミッタンスの関係を図4に示すが、本振動体は一つの振動モードのみが極めて強く励振され、本モードの縮退モード(不要モード)の励振は極めて小さい。その為、駆動モードの共振で安定に自励振駆動が実現できる。この様に一つの振動モードだけで駆動でき、電気的にも駆動モードの共振点のアドミッタンスは極めて大きく、縮退モード(不要モード)の共振点のアドミッタンスは極めて小さい振動体の設計条件を以下の実施の形態に示す。
【0020】
{実施の形態1}
振動体設計パラメータの影響を確認するため、有限要素法により解析した。図5に解析モデルを示す。突起5aを有する弾性体5の下面には圧電素子6が設けられている。圧電素子6は周方向に励振する振動の1/4波長毎の分極領域に分けられ、図中+、−で示す方向(圧電素子の厚み方向)に分極処理されている。圧電素子6の弾性体5との接合面にはほぼ前面に黒塗り部で示す電極7aが設けられている。他方の面には二つの電極群を構成する斜線部と点部で示す電極が設けられている。本解析では電極と電極の隙間は突起5aの幅とした。弾性体5と圧電素子6からなる振動体7の固定は中心穴の内周全体を完全固定した。
【0021】
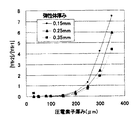
突起5aの高さを0.25mmに固定し、圧電素子6の厚みt1、弾性体5の厚みt2を変えた際の周波数−アドミッタンスの関係の一例を図6及び図7に示す。この様に弾性体5及び圧電素子6の厚みによって駆動モードの共振のアドミッタンス値と不要モードのアドミッタンス値の値は大きく変化する。不要モードが大きく励振されるほど、固有モードは同相駆動型超音波モータの原理に基づき、突起が腹に位置するモードと突起が節に位置するモードに近づいていくことが確認されている。ここでは周方向に三つの節を、径方向に一つの節円を有するいわゆる(3,1)モードを利用した場合であるが屈曲振動であれば例えば(3,0)モードや(4,1)モードを利用してもよく、モードの次数を問わない。解析した各寸法に対し、不要モードの共振のアドミッタンスのピーク値を駆動モードの共振のアドミッタンスのピーク値で割った値を不要モードの大きさを示す指数として、グラフにして図8に、表にして図9に示す。圧電素子6の厚みを厚くしていくとある点から急激に不要モードの励振力が大きくなり始め、この変化の勾配は大きい。従って、この様な変化を示す寸法に設計すると実際の製品個々の若干の寸法のばらつきでも不要モードの影響度は大きく変化し、強いては製品個々の特性に大きなばらつきを生じる恐れが有る。また不要モードが大きく励振されると、その分だけ駆動モードの励振力が弱まってしまう。その目安は不要モードの大きさを示す指数が0.1であり、それを超えないように圧電素子6及び弾性体5の厚みを設定すればよい。本結果からその傾向は弾性体5の厚みにあまり影響されず、圧電素子6の厚みに大きく影響されることが確認されている為、不要モードの大きさを示す指数が0.1以下になるような圧電素子6の厚みとすればよい。
【0022】
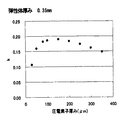
また、図10及び図11に示す弾性体5及び圧電素子6の厚みと電気−機械結合係数kの関係と、弾性体5及び圧電素子6の厚みと不要モードの大きさの関係を比較すると以下のようなことが分かった。電気−機械結合係数が最大付近もしくはこの点の圧電素子6の厚みよりも薄い範囲では不要モードの励振力は小さく、この範囲に圧電素子6の厚みを設定すれば良い。特に、不要モードが全く励振されない(図6(a))のは電気−機械結合係数が最大となる圧電素子6の厚みよりも薄い範囲である。但し、モータの出力を優先するのであれば電気−機械結合係数が最も大きくなる厚みに設定すればよい。ちなみに電気−機械結合係数の値は圧電素子6全体、即ち電極7aと7b、7cの間に駆動信号を印加した条件で解析した周波数−アドミッタンスの関係から求めた。この条件では、不要モードは励振されないから電気−機械結合係数の評価は容易となる。
【0023】
ところが上記の条件であっても、圧電素子6の厚みが30μm、弾性体の厚みが0.35mmの時には不要モードが大きく励振されてしまった。(図7(e))これは屈曲振動と波数が同じ面内振動の影響である。図12及び図13に夫々縮退モードを有する屈曲振動の固有周波数と面内振動の固有周波数の関係を示す。図6、図7並びに図12、図13の結果から分かる様に屈曲振動の固有周波数が面内振動の固有振動数近傍に位置しない様に振動体、即ち圧電素子6及び弾性体5の厚みを設定すれば良い。
【0024】
{実施の形態2}
弾性体5に設けられた突起5aの高さによっても不要モードの大きさが変化することが分かっている。図5のモデルに対して弾性体5の厚みを0.25mm、圧電素子6の厚みを80μmに固定し、突起5aの高さを変化させた場合について解析した。一例として突起5aの高さを0.4mmとした場合の、周波数−アドミッタンスの関係を図14に示す。この様に突起5aの高さによって駆動モードの共振のアドミッタンス値と不要モードのアドミッタンス値の値は大きく変化する。不要モードが大きく励振されるほど、固有モードは同相駆動型超音波モータの原理に基づき、突起5aが腹に位置するモードと突起5aが節に位置するモードに近づいていくことが確認されている。解析した各寸法に対し、不要モードの共振のアドミッタンス値を駆動モードの共振のアドミッタンス値で割った値を不要モードの大きさを示す指数としてグラフにして図15に示す。突起5aを高くしていくと突起高さが0.3mm近傍(不要モードの大きさを示す指数が0.043)から急激に不要モードの励振力が大きくなり始め、この変化の勾配は大きい。従って、この様な変化を示す寸法に設計すると実際の製品個々の寸法の若干のばらつきでも不要モードの影響度は大きく変化し、強いては製品個々の特性に大きなばらつきを生じる恐れが有る。また不要モードが大きく励振されると、その分駆動モードの励振力が弱まってしまう。不要モードの励振力は小さいほど良いが、自励発振で駆動するにはその限界はおよそ不要モードの大きさを示す指数が0.1でありそれを超えないように突起の高さを設定すればよい。以上の事柄から総合的に判断すると不要モードの大きさを示す指数が0.05となる突起の高さよりも突起を低く設定すればよい。
【0025】
{実施の形態3}
実施の形態1において不要モードの大きさが圧電素子6の厚みに影響されることを示した。この理由として以下のことが考えられる。二つの電極群7b、7cと共通電極7aをGNDとして共用している為、図16に示す様に二つの電極7b、7cの境界部分では圧電縦効果(d33)も働いている為であり、圧電素子6の厚みを厚くすると不要モードが大きく励振されるのは圧電素子6の厚みの増加に従い、この影響が大きくなりモードパターンがシフトする為であると考えられる。
【0026】
そこで、図17に示す様に共通電極を分割し表裏の電極を同形状とする。即ち電極7bと7dの間に駆動信号を印加するか電極7cと7eの間に駆動信号を印加することで駆動する。
【0027】
実際に解析した例を図18に示すが圧電素子の厚みを増やしていっても図5に示す従来の電極を用いた場合に比べ不要モードの励振力の大きさは小さいことが分かる。本解析では解析モデルの都合状、電極と電極の隙間を突起5aの幅としたが、実際にはこれよりも小さく出来る為不要モードの励振力は更に小さくなる。
【0028】
本発明の電極の使用方法としては、例えば弾性体5と圧電素子6の接合面に絶縁層を設けるか、弾性体5自体を絶縁体で構成する。圧電素子6の弾性体5との接合面にある電極は圧電素子6の内径部側面もしくは外径部側面を通じて引き回され、駆動信号が印加される。
【0029】
また、モータの駆動に用いる振動モードに面内振動を用いることも可能であり、この場合、弾性体5は不用となるからこの様に表裏同じ電極形状とした圧電素子6の外周部側面に例えば突起5aを設けて移動体4と接触させればよい。
【0030】
{実施の形態4}
図19は本発明の駆動回路により駆動される超音波モータ20を電子機器の駆動源に適用したブロック図を示したものであり、圧電素子10と圧電素子と接合される弾性体11と、弾性体11により摩擦駆動される移動体12と移動体12と一体に動作する伝達機構13と、伝達機構13の動作に基づいて動作する出力機構14からなる。例えば面内振動で駆動する場合には弾性体11は圧電素子10のみで構成されていても構わない。
【0031】
ここで、伝達機構13は例えば歯車列、摩擦車等の伝達車を用いる。出力機構14としては、プリンタにおいては紙送り機構、カメラにおいてはシャッタ駆動機構、レンズ駆動機構、フィルム巻き上げ機構等を、また電子機器や計測器においては指針等を、ロボットにおいてはアーム機構、工作機械においては歯具送り機構や加工部材送り機構等を用いる。
【0032】
尚、本実施の形態における電子機器としては電子時計、計測器、カメラ、プリンタ、印刷機、ロボット、工作機、ゲーム機、光情報機器、医療機器、移動装置等を実現できる。さらに移動体12に出力軸を設け、出力軸からのトルクを伝達するための動力伝達機構を有する構成とすれば、超音波モータ付き電子機器を実現できる。
【0033】
本発明の超音波モータを電子機器に適用することにより、電子機器の低電圧化、低消費電力化、小型化、低コスト化が実現できる。超音波モータを利用することから当然、磁気の影響を受けずまた、有害な磁気ノイズも発生しない。
【0034】
【発明の効果】
以上のように、本発明は振動体の設計パラメータを最適化することにより、突起が振動の腹と節の間に位置する振動モードを励振するようにできる為、一つの振動で駆動でき、モータ個々のばらつきが小さくしかも温度や負荷等に対しても性能の変動が小さい超音波モータが得られる。また、信号入力時に一つの固有モードだけが励振され、電気的にもほぼ一つの共振ピークを有する振動体の為、安定な自励振駆動が実現できる。
【図面の簡単な説明】
【図1】同相駆動型超音波モータの構造及び原理を示す図である。
【図2】同相駆動型超音波モータの振動体の共振特性を示す図である。
【図3】本発明の超音波モータの駆動原理を示す図である。
【図4】本発明の超音波モータの振動体の共振特性を示す図である。
【図5】本発明の超音波モータの振動体の解析モデルを示す図である。
【図6】本発明の超音波モータの固有値解析の結果を示す図である。
【図7】本発明の超音波モータの固有値解析の結果を示す図である。
【図8】振動体の厚みと不要モードの励振力の大きさの関係をグラフにして示す図である。
【図9】振動体の厚みと不要モードの励振力の大きさの関係を表にして示す図である。
【図10】振動体の厚みと電気−機械結合係数の関係を示す図である。
【図11】振動体の厚みと電気−機械結合係数の関係を示す図である。
【図12】振動体の厚みを変えた場合の屈曲振動と面内振動の固有振動の関係を示す図である。
【図13】振動体の厚みを変えた場合の屈曲振動と面内振動の固有振動の関係を示す図である。
【図14】突起高さ0.4mmの振動体の共振特性を示す図である。
【図15】突起高さと不要モードの励振力の関係を示す図である。
【図16】共通電極の影響を示す図である。
【図17】本発明の電極パターンを示す図である。
【図18】本発明の電極パターンを用いた場合の共振特性の解析結果を示す図である。
【図19】本発明の超音波モータを電子機器に応用した例のブロック図を示す図である。
【符号の説明】
1、5、10 弾性体
2,6,11 圧電素子
4,12 移動体
7 電極
Claims (8)
- 圧電素子を有する振動体と、前記圧電素子の第一の面に設けられた複数の電極と、前記圧電素子の第二の面の、前記複数の電極と対向する位置に設けられた複数の電極と、前記振動体に設けられた突起と、前記突起と接する移動体とからなり、前記圧電素子の第一の面に設けられた複数の電極の中の一つおきの電極と、これと対向する第二の面に設けられた電極の間に信号を印加することで移動体を駆動することを特徴とする超音波モータ。
- 第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に、励振する振動の四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記圧電素子の第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体と、前記突起と接し前記振動体の振動により駆動される移動体とを有する超音波モータにおいて、
前記圧電素子と前記弾性体の厚みは、前記振動体に励振される縮退モードである二つの振動の内、不要モードの共振のアドミッタンスのピーク値を駆動モードの共振のアドミッタンスのピーク値で割った値が0.1よりも低くなる、厚みであることを特徴とする超音波モータ。 - 第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に、励振する振動の四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体と、前記突起と接し前記振動体の振動により駆動される移動体とを有する超音波モータにおいて、
前記圧電素子の厚みは、前記振動体の電気−機械結合係数のとる値が最大となる、厚み近傍であることを特徴とする超音波モータ。 - 第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に、励振する振動の四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体と、前記突起と接し前記振動体の振動により駆動される移動体を有する超音波モータにおいて、
前記圧電素子の厚みは、前記振動体の電気−機械結合係数の値が最大となる、厚みよりも薄いことを特徴とする超音波モータ。 - 第一の面にほぼ全体に渡って電極を有し、第二の面の周方向に、励振する振動の四分の一波長間隔で設けられた電極を有する圧電素子と、前記圧電素子と接合された弾性体と、前記弾性体の前記第二の面の電極と電極の境界に位置する部分に設けられた突起からなる振動体と、前記突起と接し前記振動体の振動により駆動される移動体とを有する超音波モータにおいて、
前記突起の高さは、前記振動体に励振される縮退モードである二つの振動の内、不要モードの共振のアドミッタンスのピーク値を駆動モードの共振のアドミッタンスのピーク値で割った値が0.05よりも低くなる、高さであることを特徴とする超音波モータ。 - 圧電素子を有する振動体と、前記振動体に設けられた突起と、前記突起と接し前記振動体の屈曲振動により駆動される移動体とからなる超音波モータにおいて、
前記振動体の厚みは、前記屈曲振動の波数と同じ波数を有する前記振動体の面内振動の固有振動数が前記屈曲振動の固有振動数近傍に無い、厚みであることを特徴とする超音波モータ。 - 請求項1から6のいずれかに記載の超音波モータと増幅回路とで自励発振回路を構成し、前記移動体を駆動することを特徴とする超音波モータ。
- 請求項1から7の何れかに記載の超音波モータを備えたことを特徴とする超音波モータ付き電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003041500A JP4714405B2 (ja) | 2003-02-19 | 2003-02-19 | 超音波モータ及び超音波モータ付き電子機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003041500A JP4714405B2 (ja) | 2003-02-19 | 2003-02-19 | 超音波モータ及び超音波モータ付き電子機器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004254406A true JP2004254406A (ja) | 2004-09-09 |
| JP4714405B2 JP4714405B2 (ja) | 2011-06-29 |
Family
ID=33025066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003041500A Expired - Lifetime JP4714405B2 (ja) | 2003-02-19 | 2003-02-19 | 超音波モータ及び超音波モータ付き電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4714405B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006238586A (ja) * | 2005-02-24 | 2006-09-07 | Seiko Epson Corp | 圧電アクチュエータおよび機器 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63110976A (ja) * | 1986-10-28 | 1988-05-16 | Alps Electric Co Ltd | 電歪モ−タ |
| JPH02287281A (ja) * | 1989-04-28 | 1990-11-27 | Seiko Instr Inc | 超音波モータ及び超音波モータを有するアナログ式電子時計 |
| JPH0584190U (ja) * | 1991-02-21 | 1993-11-12 | アルプス電気株式会社 | 超音波リニアモータ |
| JPH0638558A (ja) * | 1992-07-16 | 1994-02-10 | Asmo Co Ltd | 振動モータ |
| JPH0739172A (ja) * | 1993-07-20 | 1995-02-07 | Matsushita Electric Ind Co Ltd | 超音波アクチュエータ |
| JPH1080161A (ja) * | 1996-09-04 | 1998-03-24 | Matsushita Electric Ind Co Ltd | 超音波モータおよび超音波モータの制御方法 |
| JP2000004590A (ja) * | 1998-04-13 | 2000-01-07 | Seiko Instruments Inc | 超音波モ―タ及び超音波モ―タ付電子機器 |
| JP2000278970A (ja) * | 1999-03-25 | 2000-10-06 | Seiko Instruments Inc | 超音波モータ及び超音波モータ付き電子機器 |
| JP2001178156A (ja) * | 1999-12-13 | 2001-06-29 | Seiko Instruments Inc | 超音波モータ及び超音波モータ付き電子機器 |
| JP2001197760A (ja) * | 1999-11-01 | 2001-07-19 | Seiko Instruments Inc | 超音波モータおよび超音波モータ付電子機器 |
| JP2002369556A (ja) * | 2001-06-05 | 2002-12-20 | Canon Inc | 電気−機械エネルギー変換素子及び振動波駆動装置 |
-
2003
- 2003-02-19 JP JP2003041500A patent/JP4714405B2/ja not_active Expired - Lifetime
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63110976A (ja) * | 1986-10-28 | 1988-05-16 | Alps Electric Co Ltd | 電歪モ−タ |
| JPH02287281A (ja) * | 1989-04-28 | 1990-11-27 | Seiko Instr Inc | 超音波モータ及び超音波モータを有するアナログ式電子時計 |
| JPH0584190U (ja) * | 1991-02-21 | 1993-11-12 | アルプス電気株式会社 | 超音波リニアモータ |
| JPH0638558A (ja) * | 1992-07-16 | 1994-02-10 | Asmo Co Ltd | 振動モータ |
| JPH0739172A (ja) * | 1993-07-20 | 1995-02-07 | Matsushita Electric Ind Co Ltd | 超音波アクチュエータ |
| JPH1080161A (ja) * | 1996-09-04 | 1998-03-24 | Matsushita Electric Ind Co Ltd | 超音波モータおよび超音波モータの制御方法 |
| JP2000004590A (ja) * | 1998-04-13 | 2000-01-07 | Seiko Instruments Inc | 超音波モ―タ及び超音波モ―タ付電子機器 |
| JP2000278970A (ja) * | 1999-03-25 | 2000-10-06 | Seiko Instruments Inc | 超音波モータ及び超音波モータ付き電子機器 |
| JP2001197760A (ja) * | 1999-11-01 | 2001-07-19 | Seiko Instruments Inc | 超音波モータおよび超音波モータ付電子機器 |
| JP2001178156A (ja) * | 1999-12-13 | 2001-06-29 | Seiko Instruments Inc | 超音波モータ及び超音波モータ付き電子機器 |
| JP2002369556A (ja) * | 2001-06-05 | 2002-12-20 | Canon Inc | 電気−機械エネルギー変換素子及び振動波駆動装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006238586A (ja) * | 2005-02-24 | 2006-09-07 | Seiko Epson Corp | 圧電アクチュエータおよび機器 |
| JP4736468B2 (ja) * | 2005-02-24 | 2011-07-27 | セイコーエプソン株式会社 | 圧電アクチュエータおよび機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4714405B2 (ja) | 2011-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7307372B2 (en) | Piezoelectric motor and method of exciting an ultrasonic traveling wave to drive the motor | |
| EP2036139B1 (en) | Wide frequency range electromechanical actuator | |
| JP4201407B2 (ja) | 圧電駆動要素を有する駆動装置 | |
| US6707232B2 (en) | Piezoelectric driving body, ultrasonic motor and electronic apparatus having an ultrasonic motor | |
| JP4648391B2 (ja) | 小型化可能なモーター | |
| JP2009254198A (ja) | 超音波モータおよび超音波振動子 | |
| JP4435695B2 (ja) | 圧電モータの動作方法および固定子を有する中空円筒形の発振器の形状をなす圧電モータ | |
| JPH06269183A (ja) | 超音波モータ | |
| US6323578B1 (en) | Piezoelectric actuator, piezoelectric actuator driving method and computer readable storage medium stored with program for making computer execute piezoelectric actuator driving method | |
| JP4714405B2 (ja) | 超音波モータ及び超音波モータ付き電子機器 | |
| US6400063B2 (en) | Ultrasonic motor and electronic apparatus having an ultrasonic motor | |
| JPH10296186A (ja) | 弾性表面波アクチュエータ | |
| JP4641709B2 (ja) | 積層圧電振動体を用いた超音波モータおよびそれを用いた電子機器 | |
| JP4634174B2 (ja) | 超音波モータ及びそれを用いた電子機器 | |
| JP3741875B2 (ja) | 自走式弾性表面波モータ | |
| JPH08182351A (ja) | 超音波アクチュエータ | |
| JP4454930B2 (ja) | 超音波モータ及び超音波モータ付き電子機器 | |
| JP5310211B2 (ja) | 超音波モータ | |
| JP3194647B2 (ja) | 超音波リニアアクチュエータ | |
| JP5736646B2 (ja) | 振動波モータ、レンズ鏡筒及びカメラ | |
| JP2004242493A (ja) | 圧電アクチュエータ及びそれを用いた電子機器 | |
| JPH07178370A (ja) | 振動子及び振動アクチュエータ | |
| JPH0552137B2 (ja) | ||
| JPH0480633B2 (ja) | ||
| JP2004343967A (ja) | 超音波モータ及びその製造方法、超音波モータを備えた電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090728 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090909 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091105 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100330 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110328 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4714405 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |