EP3587696B1 - Öffenbare raumabschlusseinrichtung sowie verfahren zu deren öffnung - Google Patents
Öffenbare raumabschlusseinrichtung sowie verfahren zu deren öffnung Download PDFInfo
- Publication number
- EP3587696B1 EP3587696B1 EP19182886.2A EP19182886A EP3587696B1 EP 3587696 B1 EP3587696 B1 EP 3587696B1 EP 19182886 A EP19182886 A EP 19182886A EP 3587696 B1 EP3587696 B1 EP 3587696B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- closure element
- room closure
- room
- swivel arm
- curb
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04D—ROOF COVERINGS; SKY-LIGHTS; GUTTERS; ROOF-WORKING TOOLS
- E04D13/00—Special arrangements or devices in connection with roof coverings; Protection against birds; Roof drainage ; Sky-lights
- E04D13/03—Sky-lights; Domes; Ventilating sky-lights
- E04D13/035—Sky-lights; Domes; Ventilating sky-lights characterised by having movable parts
- E04D13/0358—Sky-lights; Domes; Ventilating sky-lights characterised by having movable parts the parts moving, in their own plane, e.g. rolling or sliding, or moving in parallel planes with or without an additional movement, e.g. both pivoting and rolling or sliding
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04D—ROOF COVERINGS; SKY-LIGHTS; GUTTERS; ROOF-WORKING TOOLS
- E04D13/00—Special arrangements or devices in connection with roof coverings; Protection against birds; Roof drainage ; Sky-lights
- E04D13/03—Sky-lights; Domes; Ventilating sky-lights
- E04D13/035—Sky-lights; Domes; Ventilating sky-lights characterised by having movable parts
- E04D13/0351—Sky-lights; Domes; Ventilating sky-lights characterised by having movable parts the parts pivoting about a fixed axis
- E04D13/0352—Sky-lights; Domes; Ventilating sky-lights characterised by having movable parts the parts pivoting about a fixed axis the parts being of domed or pyramidal shape
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05D—HINGES OR SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS
- E05D15/00—Suspension arrangements for wings
- E05D15/56—Suspension arrangements for wings with successive different movements
- E05D15/58—Suspension arrangements for wings with successive different movements with both swinging and sliding movements
- E05D15/582—Suspension arrangements for wings with successive different movements with both swinging and sliding movements with horizontal swinging axis
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/611—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings
- E05F15/63—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings operated by swinging arms
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/72—Power-operated mechanisms for wings with automatic actuation responsive to emergency conditions, e.g. fire
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/30—Control or safety arrangements for purposes related to the operation of the system, e.g. for safety or monitoring
- F24F11/32—Responding to malfunctions or emergencies
- F24F11/33—Responding to malfunctions or emergencies to fire, excessive heat or smoke
- F24F11/34—Responding to malfunctions or emergencies to fire, excessive heat or smoke by opening air passages
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F7/00—Ventilation
- F24F7/02—Roof ventilation
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/10—Application of doors, windows, wings or fittings thereof for buildings or parts thereof
- E05Y2900/13—Type of wing
- E05Y2900/148—Windows
- E05Y2900/152—Roof windows
- E05Y2900/154—Skylights
Definitions
- the present application relates to an openable room closure device according to the preamble of claim 1. Furthermore, the present application relates to a method for opening a room closure device according to the preamble of claim 13.
- the room enclosure device which can in particular be formed by a skylight for a roof, comprises a curb and a room enclosure element.
- Such room enclosure devices are provided in particular in hall roofs in sports halls or factory buildings.
- the curb is typically directly connected to the respective building on which the room enclosure device acts, whereby the curb can, for example, protrude over a surface of a respective adjacent component.
- the room enclosure element can, for example, be formed from a transparent material, in particular translucent plastic, and extends over a certain opening area. This opening area is laterally limited by the curb, so that by placing or setting the room enclosure element all the way onto the curb, the opening area is "covered" and the space associated with the room enclosure element is closed.
- the curb can in particular have a peripheral edge, whereby a sealing surface of the edge interacts with the room enclosure element (when the latter is in a closed position) in at least a rainproof, preferably airtight manner.
- the sealing surface can be formed on an upper end face of the curb and arranged entirely in one sealing plane.
- the room closure device further comprises at least one drive and at least one transmission device.
- the drive is suitable for applying an opening force by means of which the room closure element can be opened directly or indirectly from its closed position.
- the force of the drive is transmitted to the room closure element by means of the transmission device.
- the room closure element can in particular be arranged on the attachment ring in such a way that it can be lifted off the attachment ring in order to release a flow cross-section between the room and the environment. In this way, the room closed by the room closure device can be ventilated.
- the room closure element can be transferred to a RWA position, whereby the flow cross-section between the room to which the room closure element is assigned and an environment against which the room closure element closes off the room is maximally released when the room closure element is in its RWA position.
- the flow cross-section can have the size of a cross-section of the upstand in the area of the sealing plane.
- the flow cross-section can be released to the extent that it would be released if the room closure device did not have a room closure element.
- RWA is the abbreviation for smoke and heat extraction system.
- the ability to move the room closure element into the RWA position is necessary to ensure that the room is ventilated in an emergency situation, particularly in the event of a fire in the room. This particularly applies to room closure devices that are located in a roof. In the event of a fire, smoke gases accumulating in the room can escape through the open room closure devices, thus extending the time window for escape from the associated building.
- Room closure devices of the type described above are already known in the state of the art.
- FR1445716 A , DE8808856 U1 , DE102009059107 A1 , DE29921090 U1 , EP1318248 A1 and US3903661 A describe known room closure devices. It has proven to be problematic to ensure that the room closure device can be opened reliably in an emergency. The opening process must meet particularly high requirements in terms of reliability and speed.
- the room closure element must be able to be moved into its RWA position even when it is loaded with a load on its top, for example a load of snow. It must also be possible to open it in the presence of the load within a specified period of time, for example 60 seconds.
- the present application is therefore based on the object of providing a room closure device which is constructed more efficiently than the prior art.
- the transmission device comprises at least one elongated pivot arm which is mounted on the space-closing device, in particular the curb, so as to be pivotable about a pivot axis.
- the pivot arm interacts with the space-closing element in a force-transmitting manner by means of at least one coupling means, the coupling means being arranged at a distance from the pivot axis.
- the drive also engages the pivot arm in such a way that an engagement point of the drive on the pivot arm and the pivot axis are spaced apart from one another to form a lever arm. This causes a drive force applied by means of the drive to produce a torque about the pivot axis, by means of which the pivot arm can be pivoted about the pivot axis.
- the pivot arm is typically arranged on an edge of the curb, in particular on an inner side of a side wall thereof, the pivot axis preferably being assigned to the side wall.
- the pivot arm can be connected to the curb by means of a mounting bracket, the pivot axis being formed on the mounting bracket.
- the transmission device is advantageously formed by the swivel arm, so that the transmission device is formed in one piece, with the swivel arm being directly connected to both the curb and the room closure element.
- the drive preferably acts directly on the swivel arm.
- the room closure device comprises two transmission devices, each of which is formed by a swivel arm and each assigned to one of two opposite sides of the room closure element.
- the room closure element preferably works together with two swivel arms, each of which is arranged on one side of the room closure element.
- the coupling means of both swivel arms are then preferably located on a common axis, which is arranged parallel to the swivel axis of the swivel arms. This has the advantage that if the coupling means are designed with a rotation axis, the rotation axes of both coupling means of the swivel arms coincide or match, so that the room closure element can be rotated relative to the swivel arms about this (common) rotation axis.
- the present invention is based on the idea of moving the room closure element into its RWA position by means of gravity and thus independently of the drive used. To do this, the room closure element must be tilted from its typically horizontally aligned closed position so that the weight force acting on the room closure element has a horizontal vectorial component. This can be used to move the room closure element laterally in relation to the curb and in this way to remove it as completely as possible from the curb, which is then completely released.
- the latter describes the RWA position of the room closure element, since the flow cross-section for the exchange of air between the room and the environment is maximally released.
- the room closure device in comparison to the prior art, there is no direct pivoting of the room closure element by means of a drive about a lateral pivot axis, which is assigned, for example, to an edge of the room closure element itself. Instead, the pivot arm on which the room closure element is mounted is pivoted. In this case, the room closure element is only moved indirectly due to its coupling with the pivot arm, namely as a result of the pivoting of the pivot arm about its pivot axis. This ensures that the room closure element as a whole can be lifted off the curb and in this way a (vertical) distance can be created between the room closure element and the curb.
- the design according to the invention makes it possible to lift the room closure element completely (i.e. all the way around) out of its sealing seat and thereby release a circumferential flow cross-section.
- Creating the distance between the room closure element and the upstand helps ensure that the room closure element can move freely relative to the upstand, in particular that it can "slide" sideways as a result of an acting weight force without colliding with the upstand.
- the room closure element can be transferred to its RWA position particularly easily and quickly.
- a specially dimensioned drive is not required, as the actual transfer of the room closure element to the RWA position is not carried out by the drive.
- the latter is only required to transfer the room closure element to an intermediate position, from which it can be moved further under the influence of gravity.
- the room closure element When in the intermediate position, the room closure element is typically lifted off the upstand and oriented at least slightly inclined to the horizontal.
- the swivel movement of the swivel arm can be particularly useful for bringing the room closure element arranged on the swivel arm into an inclined position, from which the transfer to the RWA position can take place.
- the space-closing element comprises at least one movement frame, by means of which at least one surface part of the space-closing element can be moved relative to the swivel arm, i.e. can be displaced translationally.
- the movement frame is preferably connected directly to the swivel arm by means of the at least one coupling means and is thus firmly connected to the swivel arm.
- a movement of the movement frame as such relative to the swivel arm is advantageously - if at all - only possible in the form of a rotation about an axis of rotation, under the formation of which the movement frame is connected to the swivel arm by means of the coupling means. This will be discussed separately below.
- the movement frame By means of the movement frame itself, a movement of the surface part, which can be a translucent coupling element, for example, relative to the swivel arm is now made possible.
- the movement frame has at least one rail system, preferably in the form of a telescopic rail, by means of which the surface part can be moved translationally relative to the swivel arm.
- This design makes it possible to move the surface part away from the area of action of the room closure element, so that the opening area of the curb is at least substantially, preferably completely, released.
- a flow cross-section can be released which at least substantially corresponds to the opening area of the curb.
- Such a release is suitable for releasing the opening area to the maximum, as if there were no room closure element on the curb.
- At least the surface part of the room closure element can then be moved sideways ("sliding"), in particular under the sole effect of its weight, which has a lateral vectorial component due to the inclination, whereby the opening area of the curb is released and the room closure element is finally in its RWA position.
- the room closure element can be moved into its RWA position by moving its surface part relative to the swivel arm.
- this procedure requires only a significantly smaller drive, since it is not necessary to completely "turn over" the room closure element, i.e. to pivot it relative to the curb by more than 90°.
- the transfer of the room closure element into its RWA position in an emergency situation can be carried out much more quickly than the "turning over" of the respective room closure element known in the state of the art.
- a stroke that is significantly reduced compared to the state of the art is sufficient to move the room closure element into an inclined intermediate position and then into its RWA position, since the complete turning over can be omitted according to the state of the art.
- the drive is designed in the form of a pneumatic piston-cylinder unit or an electric drive unit. Such a drive can be used in the room closure element according to the invention can be dimensioned significantly smaller than in the prior art.
- the room closure device according to the invention is advantageously designed in such a way that the room closure element and the swivel arm are connected to one another when the room closure element is in its RWA position.
- the connection can in particular consist of a movement frame that is directly connected to the swivel arm and with the help of which a surface part of the room closure element is moved relative to the swivel arm.
- the existence of the connection between the room closure element and the swivel arm even when the room closure element is in its RWA position has the advantage that the transfer of the room closure element back towards its closed position is basically possible. It is therefore particularly advantageous if the room closure device is transferred to its RWA position without causing any damage.
- a room closure device of this type is particularly advantageous in which the surface part can be repeatedly moved between a normal position corresponding to the closed position of the room closure element and an emergency position corresponding to the RWA position of the room closure element.
- the room closure element can be brought back into its closed position particularly easily after being transferred to its RWA position. This makes it possible, for example, for the room closure device to continue its intended operation without any special effort in the event of a false alarm that triggers the transfer of the room closure element to its RWA position and thus the surface part to its emergency position.
- the swivel arm when the room closure element is in its RWA position, is in a deflection position rotated around the swivel axis in such a way that the swivel arm protrudes outwards beyond a sealing plane of the upstand and is preferably oriented at an angle to a horizontal.
- the swivel arm is moved through or penetrates the sealing plane of the upstand as the room closure element is transferred from its closed position towards its RWA position.
- the swivel arm is visible from the surroundings, at least when the room closure element is in its RWA position, since it is no longer completely “inside” the upstand but at least partially protrudes beyond the sealing plane.
- This design is advantageous in that the swivel arm is suitable for lifting the room closure element above the sealing level of the upstand, so that the room closure element can be lifted all the way out of its sealing seat and a distance can be created between the room closure element and the upstand. In the course of this lifting, the available flow cross-section is significantly increased, so that the room can be ventilated particularly well.
- the room closure element comprises at least one locking means that at least temporarily prevents movement of the surface part relative to the swivel arm.
- the locking means preferably acts at least until the swivel arm is in a deflection position.
- the locking means serves in particular to prevent the room closure element from being transferred to its RWA position, which is mechanically possible but not desired in the absence of an RWA situation.
- Such a design is particularly advantageous in combination with a movement frame described above, which enables a translational movement of at least one surface part of the room closure element relative to the swivel arm.
- the locking means prevents this movement by locking the surface part in such a way that relative movement between the surface part and the swivel arm is prevented.
- the room closure element By releasing the locking means, however, said movement is possible, so that the room closure element can be transferred to its RWA position.
- a release can, for example, take place (automatically) as a result of a fire alarm or by means of a manually operated hand control point.
- the room closure element can be moved into a designated open position in which the flow cross-section between the curb and the room closure element is released for normal ventilation.
- the swivel arm can therefore be moved into any pre-position so that an unintentional movement of the surface part relative to the swivel arm does not occur, but the flow cross-section between the room and the surroundings is partially released and the room can be ventilated via this.
- the drive is automatically controlled in such a way that it raises the swivel arm or arms as far as possible so that they assume their deflection position, whereby the locking means is automatically moved from its fixed position to its release position.
- the at least one swivel arm can be moved from its deflection position into a return position, in which case at least a section of the swivel arm, preferably the entire swivel arm, is oriented at an inverse incline relative to the sealing plane of the curb compared to the deflection position.
- the inclination of the room closure element is changed compared to its RWA position, so that the surface part, under the effect of a horizontal force component of its weight, which is directed towards the swivel arm, moves again by means of the movement frame in the direction of the swivel arm, so that the surface part is moved from its emergency position to its normal position.
- the room closure element is suitable in the usual way for engaging the curb to form a seal and in this way establishing the closed position of the room closure element.
- the room closure element can be moved into its emergency position and back again simply by moving the at least one swivel arm. Manual intervention, in particular on a roof surface in which the room closure device is installed, can be omitted.
- the space closure element comprises at least one locking device, by means of which the space closure element can be locked at least partially, preferably along part of an edge, against the curb.
- This locking means that the space closure element can only partially be moved out of its sealing seat during the movement of the transmission device. is lifted off - namely in particular not in the area of the locked edge - and is therefore inclined in relation to the sealing plane.
- This design is particularly advantageous if the room closure element is arranged on the transmission device to form a rotation axis and is therefore basically freely rotatable relative to the transmission device after being lifted off the upstand. This could result in irregular conditions, which is why it can be advantageous to partially and temporarily lock the room closure element to the upstand in the manner described, so that movement of the room closure element during its transfer from its closed position, for example, to an open position, can be controlled.
- the swivel arm is connected to the room closure element, for example a movement frame thereof, at only one point, forming an axis of rotation.
- the room closure element it is possible for the room closure element to be rotated about the axis of rotation relative to the swivel arm during the actuation of the drive and the associated lifting of the room closure element until a rotational coupling of the swivel arm to the room closure element takes place, which prevents the two components from rotating in relation to one another.
- the design mentioned can be particularly advantageous in conjunction with a one-piece swivel arm, which is described at the beginning.
- the coupling of the swivel arm to the room closure element at a second coupling point or by means of a second coupling means can take place in particular at the same time as the locked edge of the room closure element is unlocked from the curb. In this way, the position of the room closure element relative to the swivel arm is defined at any time during a movement of the swivel arm.
- a particularly advantageous design is one in which the locking device interacts with an edge of the room closure element facing the drive, so that the room closure element initially detaches from the curb on the side facing away from the drive when the swivel arm is raised.
- This design is particularly advantageous for achieving simultaneous locking and unlocking. This provides that the locking device is released at the exact moment in which the room closure element is locked to the swivel arm, for example by means of a coupling means. By means of this procedure, the room closure element is at no time is it free to pivot uncontrollably towards the pivot arm. Instead, as the room closure device opens, the room closure element is transferred from the upstand to the pivot arm. The pivoting of the room closure element relative to the pivot arm is therefore controlled and predetermined at all times. Before the pivot arm is coupled to a second coupling point, the pivot arm is nevertheless rotated relative to the room closure element as long as the latter is locked to the upstand.
- the swivel arm has at least one further coupling means, by means of which the room closure element and the swivel arm can be connected to one another in addition to the first coupling means mentioned.
- the further coupling means is designed in particular at a distance from the first coupling means on the swivel arm, so that both coupling means can jointly absorb a pair of forces and thus transfer a torque. In this way, the room closure element can be locked to the swivel arm in a rotationally fixed manner, so that rotation of the room closure element, in particular about an axis of rotation formed on the first coupling means, is prevented.
- the further coupling means can act, for example, depending on a deflection of the swivel arm, whereby a sudden shift in the center of gravity of the room closure device occurs, in particular during the transfer of the room closure element to its RWA position when the surface part moves relative to the swivel arm.
- the further coupling means can lead to the room closure element as a whole being rotated about the axis of rotation relative to the swivel arm. This can be prevented by using an additional coupling agent.
- the method according to the invention can be carried out particularly easily using the room closure device according to the invention. It offers the particular advantage that the transfer of the room closure element into its RWA position can be carried out very quickly and at the same time with particularly little equipment compared to the prior art. This also applies to the particularly small stroke that is effectively required to transfer the room closure element into its RWA position. This leads to the advantage that the drive responsible for moving the room closure element does not have to be dimensioned in the same way as in the prior art, but can be made comparatively small and weak.
- the drive is only required for moving the room closure element in the two movement sections, while the translational movement of at least the surface part relative to the curb or the swivel arm can take place without the effect of the drive, but is preferably operated solely by means of the effect of the weight of the surface part.
- At least one surface part of the room closure element is advantageously moved exclusively in a translational manner. This movement is then independent of any pivoting of the room closure element around the pivot axis, but acts solely on the basis of an already achieved inclination of the surface part.
- the translational movement is driven solely by a weight force of at least the surface part of the room closure element.
- the room closure element is moved from its intermediate position to its RWA position exclusively by means of gravity. This has already been explained above.
- This type of operation of the room closure device has the particular advantage that it can be carried out without electricity and is therefore particularly reliable in an emergency situation.
- a method in which the room closure element is moved from its RWA position back towards its closed position solely by means of gravity is particularly preferred, whereby preferably at least the surface part of the room closure element can be moved in this way from an emergency position corresponding to the RWA position of the room closure element to a normal position corresponding to the closed position of the room closure element. It is not crucial here that the room closure element immediately returns to its closed position. Instead, it is more advantageous if the room closure element is first moved to a second intermediate position. With this method, in particular, no additional drive is required to operate the room closure device in order to ultimately move it back to its closed position, which can be easily reached from the second intermediate position.
- the room closure element during of the first movement section is at least partially locked to the curb, preferably along an edge of the curb, so that the room closure element is only partially lifted off the curb during the first movement section.
- This locking leads to the room closure element being inclined - starting from a horizontal orientation in its sealing seat. This procedure prevents an uncontrolled movement of the room closure element relative to the swivel arm, which could in particular result in an uncontrolled twisting of the room closure element about the axis of rotation of the coupling means.
- the swivel arm is locked against the room closure element in such a way that the room closure element cannot be transferred to its RWA position without prior unlocking, wherein the locking of the swivel arm against the room closure element preferably takes place at the same time as the room closure element is unlocked from the curb.
- the locking of the swivel arm against the room closure element initially offers the advantage that any further relative movement of the two components to one another can be prevented. Due to the special movement characteristics required for the gravity-driven transfer of the room closure element to the RWA position, the swivel arm and the room closure element cannot typically be continuously coupled to one another in a rotationally fixed manner.
- both components can rotate relative to one another at least during the first movement section, so that the room closure element can basically be lifted off the curb, which in turn makes it possible to create a distance between the room closure element and the curb.
- the two-part movement sequence of the room closure element during the transfer from its closed position to its RWA position is achieved in particular as a result of the arrangement of an engagement point of the drive on the swivel arm at a distance from the coupling means by means of which the room closure element and the swivel arm are coupled to one another.
- the room-closing element can be raised, in particular during a first movement section, until the pivot arm, which can initially be inclined in particular obliquely to a horizontal, at least substantially reaches a horizontal alignment and can then be brought together with the room-closing element, which in the meantime was partially locked to the curb.
- the locking device can be released and the locking of the room closure element against the curb can be removed.
- the room closure element is locked to the swivel arm or coupled to it and "taken along" by the latter as the swivel arm continues to move.
- the room closure element is finally completely lifted off its sealing seat and is increasingly tilted towards the horizontal as the swivel arm continues to pivot.
- the room closure element can be permanently moved in a controlled manner to its intermediate position, from which it can slide into the RWA position using gravity alone. To do this, all you have to do is release the locking element so that the movement frame is released.
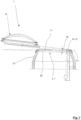
- the embodiment shown in the Figures 1 to 9 comprises a room closure device 1 according to the invention, which comprises a top ring 2 and a room closure element 3.
- the top ring 2 is formed here by a four-sided body, which has four straight side walls 16.
- the side walls 16 each define an edge 15 of the top ring 2.
- the top ring 2 On an upper end face, the top ring 2 has a circumferential sealing surface, which is arranged within a sealing plane 13.
- the room closure element 3, which in the Figure 1 shown position in its closed position, rests on the curb 2 in such a way that it interacts with the latter to form a seal. In this way, a fluidic connection between a room that is separated from the environment by the room closure device 1 and the environment is interrupted.
- the room closure element 3 seals airtight with the curb 2 .
- the room closure element 3 interacts with a drive 4.
- the latter is formed here by an electric drive unit, by means of which a pressure force can be exerted.
- the drive 4 interacts here directly with two transmission devices 5 , by means of which the force caused by the drive 4 can be transmitted to the room closure element 3.
- the transmission devices 5 are each formed here by a pivot arm 7 and are therefore each in one piece, with a respective pivot arm 7 being arranged on an edge 15 of the curb 2 to form a common pivot axis 8. In the example, this is done by means of mounting brackets that are attached to the curb 2 in a force-transmitting manner.
- the mounting brackets interact with the pivot arms 7.
- the pivot arms 7 are arranged on both sides of the room closure element 3 .
- An engagement point of the drive 4 on a respective swivel arm 7 is located at a distance from the swivel axis 8, so that the engagement point is arranged under a lever arm 10 relative to the swivel axis 8. In this way, by operating the drive 4 , it is possible to swivel the swivel arms 7 about the swivel axis 8.
- each of the swivel arms 7 with its own drive 4 ; in a particularly advantageous manner, however, a force provided by a drive 4 is distributed between both swivel arms 7 or only one of the swivel arms 7 is moved directly by means of the drive 4.
- the respective In the latter configuration, the other swivel arm 7 is dragged along over the room closure element 3.
- the description given below refers only to one of the swivel arms 7, but in principle concerns both swivel arms 7 in its design.
- the swivel arm 7 is connected to the room-closing element 3 by means of a coupling means 9 in a force-transmitting manner. This means that a movement of the swivel arm 7 also directly causes a movement of the room-closing element 3.
- the coupling means 9 is designed here as a tab 17 , which interacts with the room-closing element 3 to form a rotation axis 19.
- the swivel arms 7 are each straight and each have a longitudinal axis 26.
- the coupling means 9 of both swivel arms 7 each have a rotation axis 19 about which the room-closing element 3 can be rotated relative to the swivel arm 7.
- the coupling means 9 are positioned in the same way on both swivel arms 7 , so that the rotation axes 19 of both coupling means 9 match.
- the "common rotation axis" 19 is advantageously arranged parallel to the swivel axis 8 of the room-closing element 3 .
- a distance 18 at which the coupling means 9 is arranged on the swivel arm 7 corresponds in the example shown to approximately 50% of the total length of the swivel arm 7.
- This positioning means that the room closure element 3 does not rotate about the axis of rotation 19 solely due to its weight, but can at least essentially maintain its rotational position during the movement of the swivel arms 7.
- the room closure element 3 in the example shown is connected to the upstand 2 along an edge 27 , the room closure element 3 is moved into a Figure 2 shown inclined coupling position.
- the swivel arm 7 When this coupling position is reached, the swivel arm 7 is coupled to a movement frame 11 of the space-closing element 3 by means of a coupling means 21 arranged at its end facing away from the swivel axis 8 , so that the movement frame 11 and the swivel arm 7 are connected to one another at the location of the coupling means 21. Until the coupling position is reached, the space-closing element 3 can be rotated about the rotation axis 19 relative to the swivel arm 7 .
- the coupling means 21 arranged at the ends of the pivot arms 7 facing away from the pivot axis 8 are each formed by a mechanical locking lock.
- the coupling means 21 is suitable for interacting in a form-fitting manner with a complementary coupling means of the movement frame 11 of the space-closing element 3 and in this way producing a force-transmitting, non-destructively releasable coupling.
- the design of the room closure element 3 with a movement frame 11 is particularly advantageous.
- the latter is in direct engagement with the swivel arms 7.
- the coupling means of the room closure element 3, which interacts with the coupling means 21 of a respective swivel arm 7 is formed on the movement frame 11.
- this movement frame 11 is equipped with two telescopic rails, with one of the telescopic rails interacting with one of the swivel arms 7.
- the fixation of the movement frame 11 to the swivel arms 7 by means of two coupling means 9, 21 serves to enable a torque-transmitting bearing of the room closure element 3 on the swivel arms 7 , which prevents uncontrolled rotation of the room closure element 3 relative to the swivel arms 7.
- FIGS 4 and 5 illustrate the room closure element 3 , firstly with the swivel arms 7 in their pre-position and finally in their deflection position, from which the room closure element 3 can be transferred to its RWA position.
- the latter is shown in Figure 5
- the coupling in a torque-transmitting manner is necessary because the room closure element 3 would otherwise rotate about its axis of rotation 19 relative to the pivot arms 7 on the pivot axis 8. In the example shown, this would prevent the room closure element 3 from being transferred to its RWA position.
- the flow cross-section 6 between the environment and the room is maximally released, so that in particular emergency ventilation of the room can take place.
- This "maximum release" of the flow cross-section 6 consists in the fact that a cross-section of the curb 2 in the area of the sealing plane 13 is completely released and is therefore completely available as flow cross-section 6. Ventilation of the room is therefore just as possible in this state as if the room closure element 3 were not present.
- This type of emergency ventilation is primarily important in the event of a fire.
- the swivel arms 7 are moved by means of the drive 4 starting from the Figure 3 shown intermediate position further pivoted about the pivot axis 8 , so that the pivot arms 7 together with the space closure element 3 are transferred into an increasingly inclined position.
- the space closure element 3 is oriented at an angle to the sealing plane 13.
- the pivot arms 7 are deflected until the angle mentioned assumes the value of a limit angle 24. This is in Figure 5 illustrated.
- this limit angle 24 is reached, the pivot arms 7 are in their deflection position, with the space-closing element 3 being arranged at an angle such that a surface part 12 of the same can move translationally relative to the pivot arms 7 solely due to its weight.
- Such a movement is made possible by means of the movement frame 11 , which has the telescopic rails described above.
- a locking means 14 of the room closure element 3 is now released, whereby the surface part 12 is decoupled from the movement frame 11 and can move relative to the latter.
- the surface part 12 - driven solely by its weight - moves translationally relative to the swivel arms 7 so that it is completely “moved out” of an opening area of the curb 2.
- the flow cross-section 6 between the room and the environment is thus completely released, so that air can flow unhindered, particularly from the room in a vertical direction upwards into the environment.
- the flow cross-section 6 essentially corresponds to an opening cross-section of the curb 2.
- the locking means 14 is advantageously coupled to the respective pivot arm 7 in such a way that it automatically releases the translational movement between the surface part 12 and the movement frame 11 as soon as the pivot arms 7 are pivoted about the pivot axis 8 by such an amount that the space-closing element 3 is arranged relative to the sealing plane 13 , forming the limit angle 24.
- the pivot arms 7 are then in their respective deflection position.
- the total stroke by which a piston 22 of the drive 4 must be extended from the associated cylinder 23 is particularly small compared to the prior art, since the room closure element 3 in particular does not have to be pivoted by 90° or more relative to the sealing plane 13.
- the smaller pivot angle means that the movement of the room closure element 3 can be significantly shorter overall, which means that the total time for transferring the room closure element 3 from its closed position to its RWA position is significantly shorter than is possible in the prior art.
- the drive 4 can be dimensioned considerably smaller than in the prior art, which also results in a cost advantage.
- the room closure element 3 After the room closure element 3 has been moved into its RWA position, it may be of interest to move it back into its closed position.
- a fire alarm that initiated the movement of the room closure element 3 may have been a false alarm, after which the original state of the room closure device 1 should be restored. In the current state of technology, this is often not even possible, since the transfer of the respective room closure element 3 into its RWA position is not non-destructive.
- the return of the room closure element 3 is particularly easy. This is particularly evident from the Figures 7 to 9 .
- the swivel arms 7 are swiveled back around the swivel axis 8 by means of the drive 4 until the longitudinal axes 26 of the swivel arms 7 are arranged at an angle 25 relative to the horizontal sealing plane 13.
- the swivel arms 7 are then in their Back position.
- the angle 25 between the longitudinal axis 26 and the sealing plane 13 when the swivel arms 7 are in this return position is negative in relation to the sealing plane 13 , while the limit angle 24 described above is positive when the swivel arms 7 are in their deflection position.
- the inclination of the swivel arms 7 in their return position means that the weight of the surface part 12 has a horizontal component in the direction of the curb 2. This in turn means that the surface part 12 is moved back from its emergency position to its normal position by means of the movement frame 11 solely by the effect of gravity. The result of this process can be seen particularly well from Figure 8 recognizable.
- the room closure element 3 is then placed back into its sealing seat in the desired manner, so that the room closure element 3 seals against the curb 2 at least in a rainproof, preferably airtight manner. Consequently, the room closure element 3 is ultimately back in its closed position, which is made up of Figure 9
- the room closure element 3 is first placed with its one edge 27 on the upstand 2.
- the edge 27 is then coupled to the upstand 2 in a force-transmitting manner and at the same time the coupling means 21 for connecting the swivel arms 7 and the movement frame 11 is released.
- the swivel arms 7 can now be swiveled again relative to the movement frame 11 about the axis of rotation 9.
- the room closure element 3 is at this moment in the Figure 2
- the alignment shown in Figure 9 shown closing position is reached.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Specific Sealing Or Ventilating Devices For Doors And Windows (AREA)
Description
- Die vorliegende Anmeldung betrifft eine öffenbare Raumabschlusseinrichtung gemäß dem Oberbegriff von Anspruch 1. Weiterhin betrifft die vorliegende Anmeldung ein Verfahren zur Öffnung einer Raumabschlusseinrichtung gemäß dem Oberbegriff von Anspruch 13.
- Die Raumabschlusseinrichtung, die insbesondere von einer Lichtkuppel für ein Dach gebildet sein kann, umfasst einen Aufsatzkranz und ein Raumabschlusselement. Derartige Raumabschlusseinrichtungen werden insbesondere in Hallendächern in Sporthallen oder Fabrikgebäuden vorgesehen. Der Aufsatzkranz ist typischerweise unmittelbar an das jeweilige Bauwerk angeschlossen, an dem die Raumabschlusseinrichtung wirkt, wobei der Aufsatzkranz beispielsweise über eine Fläche eines jeweilig angrenzenden Bauteils vorstehen kann. Das Raumabschlusselement kann beispielsweise von einem transparenten Material, insbesondre lichtdurchlässigem Kunststoff, gebildet sein und erstreckt sich über eine gewisse Öffnungsfläche. Diese Öffnungsfläche ist seitlich durch den Aufsatzkranz begrenzt, sodass mittels Auflegens bzw. Aufsetzens des Raumabschlusselements umlaufend auf den Aufsatzkranz die Öffnungsfläche "abgedeckt" und der dem Raumabschlusselement zugeordnete Raum verschlossen sind. Der Aufsatzkranz kann insbesondere einen umlaufenden Rand aufweisen, wobei eine Dichtfläche des Rands mit dem Raumabschlusselement (bei Vorliegen des letzteren in einer Schließposition) zumindest regendicht, vorzugsweise luftdicht, zusammenwirkt. Insbesondere kann die Dichtfläche an einer oberen Stirnseite des Aufsatzkranzes ausgebildet und vollständig in einer Dichtebene angeordnet sein.
- Die Raumabschlusseinrichtung umfasst ferner mindestens einen Antrieb sowie mindestens eine Übertragungseinrichtung. Der Antrieb ist dazu geeignet, eine Öffnungskraft aufzubringen, mittels der das Raumabschlusselement mittelbar oder unmittelbar ausgehend von seiner Schließposition geöffnet werden kann. Eine Übertragung der Kraft des Antriebs auf das Raumabschlusselement findet mittels der Übertragungseinrichtung statt. Das Raumabschlusselement kann insbesondere in solcher Weise an dem Aufsatzkranz angeordnet sein, dass es von dem Aufsatzkranz abhebbar ist, um einen Strömungsquerschnitt zwischen dem Raum und der Umgebung freizugeben. Auf diese Weise kann der mittels der Raumabschlusseinrichtung verschlossene Raum belüftet werden.
- Das Raumabschlusselement ist in eine RWA-Position überführbar, wobei der Strömungsquerschnitt zwischen dem Raum, dem das Raumabschlusselement zugeordnet ist, und einer Umgebung, gegen die das Raumabschlusselement den Raum abschließt, bei Vorliegen des Raumabschlusselements in seiner RWA-Position maximal freigegeben ist. Insbesondere kann der Strömungsquerschnitt bei Vorliegen des Raumabschlusselements in dessen RWA-Position betragsmäßig die Größe eines Querschnitts des Aufsatzkranzes im Bereich der Dichtebene aufweisen. Alternativ oder zusätzlich kann der Strömungsquerschnitt bei Vorliegen des Raumabschlusselements in seiner RWA-Position so weit freigegeben sein, wie er freigegeben wäre, wenn die Raumabschlusseinrichtung über kein Raumabschlusselement verfügen würde. RWA ist die Abkürzung für Rauch-und Wärmeabzugs-Anlage.
- Die Überführbarkeit des Raumabschlusselements in die RWA-Position ist erforderlich, um in einer Notsituation, insbesondere einem in dem Raum vorliegenden Brandfall, eine Entlüftung des Raums gewährleisten zu können. Dies betrifft insbesondere solche Raumabschlusseinrichtungen, die in einem Dach angeordnet sind. Im Brandfall können in dem Raum anfallende Rauchgase über die geöffneten Raumabschlusseinrichtungen entweichen und das Zeitfenster zur Flucht aus dem zugehörigen Gebäude auf diese Weise strecken.
- Raumabschlusseinrichtungen der eingangs beschriebenen Art sind im Stand der .Technik bereits bekannt. Zum Beispiel
FR1445716 A DE8808856 U1 ,DE102009059107 A1 ,DE29921090 U1 ,EP1318248 A1 undUS3903661 A beschreiben bekannte Raumabschlusseinrichtungen. Hierbei hat es sich als problematisch herausgestellt, eine zuverlässige Öffnung der Raumabschlusseinrichtung im Notfall sicherzustellen. Der Öffnungsvorgang muss besonders hohen Anforderungen an Zuverlässigkeit und Geschwindigkeit genügen. Insbesondere muss das Raumabschlusselement auch dann in seine RWA-Position überführbar sein, wenn es auf seiner Oberseite mit einer Last, beispielsweise einer Schneelast, belastet ist. Die Öffnung muss zudem auch in Gegenwart der Last innerhalb eines vorgegebenen Zeitraums, beispielsweise 60 Sekunden, erfolgen können. - Der apparative Aufwand, um diese Kriterien einzuhalten, ist im Verhältnis dazu, was eine Raumabschlusseinrichtung im Normalbetrieb leisten muss, besonders groß. Dies führt dazu, dass die Dimensionierung insbesondere des Antriebs maßgeblich durch die Anforderungen in einer RWA-Situation vorgegeben wird. Die verfügbare Leistung des Antriebs wird jedoch im Normalbetrieb lediglich in Bruchteilen genutzt. Die bekannten Raumabschlusseinrichtungen sind aufgrund dieser Umstände vergleichsweise aufwendig in ihrer Konstruktion, ohne dass dies für den üblichen Gebrauch erforderlich wäre.
- Der vorliegenden Anmeldung liegt mithin die Aufgabe zugrunde, eine Raumabschlusseinrichtung bereitzustellen, die im Vergleich zum Stand der Technik effizienter konstruiert ist.
- Die zugrunde liegende Aufgabe wird erfindungsgemäß mittels einer Raumabschlusseinrichtung mit den Merkmalen des Anspruchs 1 gelöst. Vorteilhafte Ausgestaltungen ergeben sich aus den Unteransprüchen 2 bis 12.
- Erfindungsgemäß umfasst die Übertragungseinrichtung mindestens einen langgestreckten Schwenkarm, der um eine Schwenkachse verschwenkbar an der Raumabschlusseinrichtung, insbesondere dem Aufsatzkranz, gelagert ist. Der Schwenkarm wirkt mittels mindestens eines Kopplungsmittels in Kraft übertragender Weise mit dem Raumabschlusselement zusammen, wobei das Kopplungsmittel in einem Abstand von der Schwenkachse angeordnet ist. Der Antrieb greift zudem derart an dem Schwenkarm an, dass eine Angriffsstelle des Antriebs an dem Schwenkarm und die Schwenkachse unter Ausbildung eines Hebelarms voneinander beabstandet sind. Hierdurch wird bewirkt, dass eine mittels des Antriebs aufgebrachte Antriebskraft ein Drehmoment um die Schwenkachse bewirkt, mittels dessen der Schwenkarm um die Schwenkachse verschwenkbar ist. Der Schwenkarm ist typischerweise an einem Rand des Aufsatzkranzes, insbesondere an einer Innenseite einer Seitenwandung desselben, angeordnet, wobei die Schwenkachse vorzugsweise der Seitenwandung zugeordnet ist. Beispielsweise kann der Schwenkarm mittels einer Montagelasche an den Aufsatzkranz angeschlossen sein, wobei an der Montagelasche die Schwenkachse ausgebildet ist. Bei Vorliegen des Raumabschlusselements in dessen Schließposition befindet sich der Schwenkarm vorzugsweise vollständig innerhalb der Raumabschlusseinrichtung, das heißt diesseits der Dichtebene des Aufsatzkranzes. In dieser Stellung ist der Schwenkarm von der Umgebung her nicht sichtbar.
- Vorteilhafterweise ist die Übertragungseinrichtung von dem Schwenkarm gebildet, sodass die Übertragungseinrichtung einstückig ausgebildet ist, wobei der Schwenkarm unmittelbar sowohl mit dem Aufsatzkranz als auch unmittelbar mit dem Raumabschlusselement verbunden ist. Der Antrieb greift vorzugsweise unmittelbar an dem Schwenkarm an. Hierbei ist es denkbar, dass die Raumabschlusseinrichtung zwei Übertragungseinrichtungen umfasst, die jeweils von einem Schwenkarm gebildet sind und jeweils einer von zwei sich gegenüberliegenden Seiten des Raumabschlusselements zugeordnet sind.
- Bevorzugt wirkt das Raumabschlusselement mit zwei Schwenkarmen zusammen, die jeweils auf einer Seite des Raumabschlusselements angeordnet sind. Die Kopplungsmittel beider Schwenkarme befinden sich dann vorzugsweise auf einer gemeinsamen Achse, die parallel zu der Schwenkachse der Schwenkarme angeordnet ist. Dies hat den Vorteil, dass im Falle einer Ausgestaltung der Kopplungsmittel mit einer Drehachse die Drehachsen beider Kopplungsmittel der Schwenkarme zusammenfallen bzw. übereinstimmen, sodass das Raumabschlusselement relativ zu den Schwenkarmen um diese (gemeinsame) Drehachse verdreht werden kann.
- Der vorliegenden Erfindung liegt die Überlegung zugrunde, das Raumabschlusselement mittels Wirkung der Schwerkraft und somit unabhängig von dem verwendeten Antrieb in seine RWA-Position zu überführen. Hierzu ist es erforderlich, dass das Raumabschlusselement ausgehend von seiner typischerweise horizontal ausgerichteten Schließposition schräg gestellt wird, sodass die auf das Raumabschlusselement wirkende Gewichtskraft einen horizontalen vektoriellen Anteil erhält. Dieser kann dazu genutzt werden, das Raumabschlusselement seitlich bezogen auf den Aufsatzkranz zu bewegen und auf diese Weise möglichst vollständig von dem Aufsatzkranz zu entfernen, der daraufhin vollständig freigegeben ist. Letzteres beschreibt die RWA-Position des Raumabschlusselements, da der Strömungsquerschnitt zum Austausch von Luft zwischen dem Raum und der Umgebung maximal freigegeben ist.
- Zur Implementierung der vorstehenden Überlegung findet bei der erfindungsgemäßen Raumabschlusseinrichtung im Vergleich zum Stand der Technik keine direkte Verschwenkung des Raumabschlusselements mittels eines Antriebs um eine seitliche Schwenkachse statt, die beispielsweise einem Rand des Raumabschlusselements selbst zugeordnet ist. Stattdessen wird eine Verschwenkung des Schwenkarms vorgenommen, an dem das Raumabschlusselement gelagert ist. Hierbei wird das Raumabschlusselement aufgrund seiner Kopplung mit dem Schwenkarm lediglich mittelbar bewegt, nämlich infolge der Verschwenkung des Schwenkarms um dessen Schwenkachse. Hierdurch wird erreicht, dass das Raumabschlusselement als Ganzes von dem Aufsatzkranz abgehoben werden kann und auf diese Weise ein (vertikaler) Abstand zwischen dem Raumabschlusselement und dem Aufsatzkranz geschaffen werden kann. Insbesondere ist es mittels der erfindungsgemäßen Ausgestaltung möglich, das Raumabschlusselement vollständig (das heißt umlaufend) aus seinem Dichtsitz zu heben und hierdurch einen umlaufenden Strömungsquerschnitt freizugeben.
- Die Schaffung des Abstands zwischen dem Raumabschlusselement und dem Aufsatzkranz trägt dazu bei, dass sich das Raumabschlusselement relativ zu dem Aufsatzkranz frei bewegen kann, insbesondere infolge einer wirkenden Gewichtskraft seitlich "abgleiten" kann, ohne mit dem Aufsatzkranz zu kollidieren. Auf diese Weise kann eine Überführung des Raumabschlusselements in dessen RWA-Position besonders einfach und zügig bewerkstelligt werden. Eines besonders dimensionierten Antriebs bedarf es dabei nicht, da die eigentliche Überführung des Raumabschlusselements in die RWA-Position nicht von dem Antrieb vorgenommen wird. Letzterer wird nur benötigt, um das Raumabschlusselement in eine Zwischenposition zu überführen, von der ausgehend es unter Wirkung der Schwerkraft weiter bewegt werden kann. Bei Vorliegen in der Zwischenposition ist das Raumabschlusselement typischerweise von dem Aufsatzkranz abgehoben und zumindest leicht gegen die Horizontale geneigt orientiert. Die Schwenkbewegung des Schwenkarms kann besonders gut dazu verhelfen, das an dem Schwenkarm angeordnete Raumabschlusselement in eine schräge Stellung zu bringen, von der ausgehend die Überführung in die RWA-Position stattfinden kann.
- Erfindungsgemäß umfasst das Raumabschlusselement mindestens einen Bewegungsrahmen, mittels dessen zumindest ein Flächenteil des Raumabschlusselements relativ zu dem Schwenkarm bewegbar, d.h. translatorisch verschiebbar, ist. Der Bewegungsrahmen ist vorzugsweise unmittelbar mittels des mindestens einen Kopplungsmittels mit dem Schwenkarm verbunden und ist auf diese Weise fest an den Schwenkarm angeschlossen. Eine Bewegung des Bewegungsrahmens als solchem relativ zu dem Schwenkarm ist vorteilhafterweise - wenn überhaupt - nur in Form einer Drehung um eine Drehachse möglich, unter deren Ausbildung der Bewegungsrahmen mittels des Kopplungsmittels an den Schwenkarm angeschlossen ist. Hierauf wird nachstehend noch gesondert eingegangen. Mittels des Bewegungsrahmens selbst wird nunmehr eine Bewegung des Flächenteils, das beispielsweise ein lichtdurchlässiges Kuppelelement sein kann, relativ zu dem Schwenkarm ermöglicht. Erfindungsgemäß weist der Bewegungsrahmen mindestens ein Schienensystem, vorzugsweise in Form einer Teleskopschiene, auf, mittels dessen das Flächenteil translatorisch relativ zu dem Schwenkarm bewegbar ist.
- Diese Ausgestaltung ermöglicht es, das Flächenteil aus dem Wirkungsbereich des Raumabschlusselements weg zu bewegen, sodass die Öffnungsfläche des Aufsatzkranzes zumindest im Wesentlichen, vorzugsweise vollständig, freigegeben wird. Mit anderen Worten kann mittels einer solchen Ausgestaltung mittels "Wegschiebens" bzw. "Abgleitens" des Flächenteils ein Strömungsquerschnitt freigegeben werden, der zumindest im Wesentlichen der Öffnungsfläche des Aufsatzkranzes entspricht. Eine solche Freigabe ist dazu geeignet, die Öffnungsfläche maximal freizugeben, so als wäre auf dem Aufsatzkranz kein Raumabschlusselement vorhanden. Nach erfolgter Bewegung des Flächenteils relativ zu dem Schwenkarm liegt das Raumabschlusselement folglich in seiner RWA-Position vor. Das beschriebene "Wegschieben" oder "Abgleiten" kann besonders einfach mittels Wirkung der Gewichtskraft des Flächenteils erfolgen.
- Eine Entlüftung des mittels der Raumabschlusseinrichtung gegen eine Umgebung abgeschlossenen Raums, insbesondere in einem Brandfall, kann auf diese Weise bestmöglich bewirkt werden. Hierzu ist eine vollständige Verschwenkung des Raumabschlusselements um 90° oder mehr und ggf. entgegen einer wirkenden Gewichtskraft, beispielsweise bewirkt durch Schnee, wie sie im Stand der Technik erforderlich ist, nicht mehr erforderlich. Stattdessen ist es denkbar, das Raumabschlusselement in einem ersten Bewegungsabschnitt lediglich leicht aus seinem Dichtsitz anzuheben und in einem zweiten Bewegungsabschnitt bezogen auf eine Horizontale leicht schräg zu stellen, sodass sich eine Schrägstellung zumindest des Flächenteils einstellt. Mittels des Bewegungsrahmens kann dann zumindest das Flächenteil des Raumabschlusselements, insbesondere unter alleiniger Wirkung seiner Gewichtskraft, die aufgrund der Schrägstellung eine seitliche vektorielle Komponente aufweist, seitlich weg bewegt werden ("Abgleiten"), wodurch die Öffnungsfläche des Aufsatzkranzes freigegeben wird und das Raumabschlusselement schließlich in seiner RWA-Position vorliegt.
- Bei einer solchen Ausführung ist mithin das Raumabschlusselement mittels Bewegung seines Flächenteils relativ zu dem Schwenkarm in seine RWA-Position überführbar. Diese Vorgehensweise erfordert im Vergleich zum Stand der Technik nur einen deutlich kleiner dimensionierten Antrieb, da kein vollständiges "Umschlagen" des Raumabschlusselements, das heißt eine Verschwenkung desselben gegenüber dem Aufsatzkranz um mehr als 90°, notwendig ist. Ferner kann als zusätzlicher Vorteil die Überführung des Raumabschlusselements in dessen RWA-Position in einer Notsituation deutlich schneller ausgeführt werden als das im Stand der Technik bekannte "Umschlagen" des jeweiligen Raumabschlusselements. Insbesondere ist ein gegenüber dem Stand der Technik stark verringerter Hub ausreichend, um das Raumabschlusselement bis in eine schräge Zwischenposition und anschließend in seine RWA-Position zu überführen, da das vollständige Umschlagen gemäß dem Stand der Technik entfallen kann. Dies ist insbesondere dann von Vorteil, wenn der Antrieb in Form einer pneumatischen Kolben-Zylinder-Einheit oder einer elektrischen Antriebseinheit ausgebildet ist. Eine solche kann bei dem erfindungsgemäßen Raumabschlusselement bedeutend kleiner dimensioniert werden als im Stand der Technik.
- Vorteilhafterweise ist die erfindungsgemäße Raumabschlusseinrichtung derart ausgebildet, dass das Raumabschlusselement und der Schwenkarm bei Vorliegen des Raumabschlusselements in dessen RWA-Position miteinander verbunden sind. Die Verbindung kann insbesondere im Umfang eines Bewegungsrahmens bestehen, der unmittelbar an den Schwenkarm angeschlossen ist und mit dessen Hilfe ein Flächenteil des Raumabschlusselements relativ zu dem Schwenkarm bewegt wird. Das Bestehen der Verbindung von Raumabschlusselement und Schwenkarm auch noch dann, wenn das Raumabschlusselement in seiner RWA-Position vorliegt, hat den Vorteil, dass die Überführung des Raumabschlusselements zurück in Richtung seiner Schließposition grundsätzlich möglich ist. Somit ist es besonders vorteilhaft, wenn die Raumabschlusseinrichtung zerstörungsfrei in ihre RWA-Position überführt wird.
- Grundsätzlich ist weiterhin eine solche Raumabschlusseinrichtung besonders vorteilhaft, bei der das Flächenteil wiederholt zwischen einer mit der Schließposition des Raumabschlusselements korrespondierenden Normalstellung und einer mit der RWA-Position des Raumabschlusselements korrespondierenden Notstellung bewegbar ist. Auf diese Weise kann das Raumabschlusselement nach einer Überführung in seine RWA-Position besonders einfach wieder in seine Schließposition gebracht werden. Hierdurch ist es beispielsweise möglich, dass die Raumabschlusseinrichtung im Falle eines Fehlalarms, der die Überführung des Raumabschlusselements in dessen RWA-Position und mithin des Flächenteils in dessen Notstellung auslöst, ohne besonderen Aufwand ihren bestimmungsgemäßen Betrieb fortsetzt.
- Unabhängig von der Ausgestaltung der Raumabschlusseinrichtung mit einem Bewegungsrahmen kann es weiterhin von besonderem Vorteil sein, wenn sich der Schwenkarm bei Vorliegen des Raumabschlusselements in dessen RWA-Position in einer derart um die Schwenkachse verdrehten Auslenkposition befindet, dass der Schwenkarm über eine Dichtebene des Aufsatzkranzes hinaus nach außen vorsteht und vorzugsweise gegen eine Horizontale geneigt orientiert ist. Mit anderen Worten wird bei dieser Ausgestaltung der Schwenkarm im Zuge der Überführung des Raumabschlusselements ausgehend von seiner Schließposition in Richtung seiner RWA-Position durch die Dichtebene des Aufsatzkranzes hindurch bewegt bzw. durchstößt selbige. Im Ergebnis ist der Schwenkarm zumindest bei Vorliegen des Raumabschlusselements in dessen RWA-Position von einer Umgebung her sichtbar, da er sich nicht mehr vollständig "innerhalb" des Aufsatzkranzes befindet, sondern zumindest teilweise über die Dichtebene hinaus vorsteht. Diese Ausgestaltung ist insoweit von Vorteil, als der Schwenkarm dazu geeignet ist, das Raumabschlusselement über die Dichtebene des Aufsatzkranzes hinaus anzuheben, sodass das Raumabschlusselement umlaufend aus seinem Dichtsitz hebbar und ein Abstand zwischen dem Raumabschlusselement und dem Aufsatzkranz schaffbar ist. Im Zuge dieses (Ab-)Hebens wird der verfügbare Strömungsquerschnitt deutlich vergrößert, sodass eine Belüftung des Raums besonders gut erfolgen kann.
- Bei der Anwendung dieser Konstruktion ist es weiterhin vorteilhaft, wenn das Raumabschlusselement mindestens ein Rastmittel umfasst, das eine Bewegung des Flächenteils relativ zu dem Schwenkarm zumindest zeitweise verhindert. Das Rastmittel wirkt vorzugsweise zumindest so lange, bis der Schwenkarm sich in einer Auslenkposition befindet. Das Rastmittel dient insbesondere dazu, eine zwar mechanisch mögliche, jedoch in Abwesenheit einer RWA-Situation nicht gewünschte Überführung des Raumabschlusselements in dessen RWA-Position zu verhindern. Eine derartige Ausgestaltung ist insbesondere in Kombination mit einem vorstehend beschriebenen Bewegungsrahmen von Vorteil, der eine translatorische Bewegung zumindest eines Flächenteils des Raumabschlusselements relativ zu dem Schwenkarm ermöglicht. Das Rastmittel verhindert diese Bewegung mittels Verrastung des Flächenteils in solcher Weise, dass eine Relativbewegung zwischen Flächenteil und Schwenkarm unterbunden ist. Mittels Freigabe des Rastmittels ist besagte Bewegung hingegen möglich, sodass das Raumabschlusselement in dessen RWA-Position überführbar ist. Eine solche Freigabe kann beispielsweise (automatisch) infolge einer Brandmeldung oder mittels einer manuell betätigbaren Handbedienstelle erfolgen. Solange das Rastmittel geschlossen ist, kann das Raumabschlusselement in eine bestimmungsgemäße Offenposition überführt werden, in der der Strömungsquerschnitt zwischen Aufsatzkranz und Raumabschlusselement zur normalen Belüftung freigegeben wird.
- In der Anwendung der Raumabschlusseinrichtung ist es weiterhin denkbar, die Überführung des Raumabschlusselements in dessen RWA-Position mittels der Auslenkung des Schwenkarms zu steuern, wobei die Überführung des Rastmittels von einer Fixierstellung in eine Freigabestellung von der Position des Schwenkarms abhängig gemacht wird. Somit kann eine bestimmte Auslenkung des Schwenkarms automatisch die Freigabe des Rastmittels bewirken, wodurch, insbesondere infolge der Wirkung der Schwerkraft, zumindest das Flächenteil des Raumabschlusselements mittels des Bewegungsrahmens selbsttätig translatorisch relativ zu dem Schwenkarm bewegt und somit das Raumabschlusselement in dessen RWA-Position überführt werden. Diese Freigabe erfolgt hingegen nicht, wenn der Schwenkarm lediglich bis in eine "Vorposition" überführt wird, in der das Rastmittel noch nicht freigegeben ist. Insbesondere zum Zweck der Lüftung des zugehörigen Raums kann der Schwenkarm folglich in eine beliebige Vorposition überführt werden, sodass eine unbeabsichtigte Bewegung des Flächenteils relativ zu dem Schwenkarm nicht auftritt, gleichwohl jedoch der Strömungsquerschnitt zwischen dem Raum und der Umgebung teilweise freigegeben ist und hierüber eine Lüftung des Raums stattfinden kann. Bei einer solchen Ausgestaltung ist es denkbar, dass beispielsweise im Zuge einer Brandmeldung der Antrieb derart automatisch angesteuert wird, dass er den Schwenkarm bzw. die Schwenkarme maximal anhebt, sodass diese ihre Auslenkposition einnehmen, wodurch das Rastmittel automatisch von dessen Fixierstellung in dessen Freigabestellung überführt wird.
- Die erfindungsgemäße Raumabschlusseinrichtung weiter ausgestaltend ist der mindestens eine Schwenkarm ausgehend von seiner Auslenkposition in eine Rückposition bewegbar ist, bei deren Vorliegen zumindest ein Abschnitt des Schwenkarms, vorzugsweise der gesamte Schwenkarm, im Vergleich zu der Auslenkposition umgekehrt geneigt relativ zu der Dichtebene des Aufsatzkranzes orientiert ist. Diese Ausgestaltung hat die technische Wirkung, dass der Flächenteil des Raumabschlusselements ausschließlich mittels Wirkung der Gewichtskraft des Flächenteils von dessen Notstellung zurück in dessen Normalstellung bewegbar ist. Dies liegt darin begründet, dass mittels der Überführung des Schwenkarms bzw. der Schwenkarme in die Rückposition die Neigung des Raumabschlusselements gegenüber dessen RWA-Position geändert wird, sodass das Flächenteil unter Wirkung einer horizontalen Kraftkomponente seiner Gewichtskraft, die auf den Schwenkarm zu gerichtet ist, sich wieder mittels des Bewegungsrahmens in Richtung des Schwenkarms bewegt, sodass das Flächenteil ausgehend von seiner Notstellung in seine Normalstellung bewegt wird. In dieser Normalstellung des Flächenteils ist das Raumabschlusselement in der gewohnten Weise dazu geeignet, in dichtenden Eingriff mit dem Aufsatzkranz zu treten und auf diese Weise die Schließposition des Raumabschlusselements herzustellen. Nach alldem kann bei dieser Ausgestaltung das Raumabschlusselement allein mittels Bewegung des mindestens einen Schwenkarms in seine Notposition und wieder zurück überführt werden. Ein manueller Eingriff, insbesondere auf einer Dachfläche, in der die Raumabschlusseinrichtung installiert ist, kann entfallen.
- Das erfindungsgemäße Raumabschlusselement weiter ausgestaltend umfasst selbiges mindestens eine Verriegelungseinrichtung, mittels der das Raumabschlusselement zumindest teilweise, vorzugsweise entlang eines Teils eines Randes, gegen den Aufsatzkranz verriegelbar ist. Diese Verriegelung bewirkt, dass das Raumabschlusselement im Zuge der Bewegung der Übertragungseinrichtung lediglich teilweise aus seinem Dichtsitz abgehoben wird - nämlich insbesondere nicht im Bereich des verriegelten Randes - und sich mithin bezogen auf die Dichtebene schräg stellt. Diese Ausgestaltung ist insbesondere dann vorteilhaft, wenn das Raumabschlusselement unter Ausbildung einer Drehachse an der Übertragungseinrichtung angeordnet ist und mithin nach dem Abheben von dem Aufsatzkranz grundsätzlich frei relativ zu der Übertragungseinrichtung verdrehbar wäre. Hierdurch könnten unregelmäßige Zustände entstehen, weshalb es vorteilhaft sein kann, das Raumabschlusselement in der beschriebenen Weise teilweise sowie zeitweise an dem Aufsatzkranz zu verriegeln, sodass eine Bewegung des Raumabschlusselements im Zuge von seiner Überführung von seiner Schließposition beispielsweise in eine Offenposition kontrollierbar ist.
- Vorteilhafterweise ist der Schwenkarm zumindest bei Vorliegen der Raumabschlusseinrichtung in ihrer Schließposition ausschließlich an einer Stelle unter Ausbildung einer Drehachse mit dem Raumabschlusselement, beispielsweise einem Bewegungsrahmen desselben, verbunden. Auf diese Weise ist es möglich, dass das Raumabschlusselement im Zuge einer Betätigung des Antriebs und einer damit einhergehenden Anhebung des Raumabschlusselements zumindest solange um die Drehachse relativ zu dem Schwenkarm verdreht wird, bis eine rotatorische Koppelung des Schwenkarms mit dem Raumabschlusselement stattfindet, die eine ebensolche Verdrehung beider Bauteile zueinander verhindert. Die genannte Ausgestaltung kann insbesondere in Verbindung mit einem einstückigen Schwenkarm vorteilhaft sein, der eingangs beschrieben ist. Die Koppelung des Schwenkarms mit dem Raumabschlusselement an einer zweiten Kopplungsstelle bzw. mittels eines zweiten Kopplungsmittels kann insbesondere gleichzeitig zu einer Entriegelung des verriegelten Randes des Raumabschlusselements von dem Aufsatzkranz erfolgen. Auf diese Weise ist die Stellung des Raumabschlusselements relativ zu dem Schwenkarm zu jedem Zeitpunkt während einer Bewegung des Schwenkarms definiert.
- Besonders vorteilhaft ist eine solche Ausgestaltung, bei der die Verriegelungseinrichtung mit einem dem Antrieb zugewandten Rand des Raumabschlusselements zusammenwirkt, sodass das Raumabschlusselement im Zuge des Anhebens des Schwenkarms zunächst an der dem Antrieb abgewandten Seite von dem Aufsatzkranz löst. Diese Ausgestaltung ist besonders vorteilhaft, um eine simultane Verriegelung und Entriegelung zu bewerkstelligen. Diese sieht vor, dass die Verriegelungseinrichtung genau in dem Moment gelöst wird, in dem das Raumabschlusselement, beispielsweise mittels eines Kopplungsmittels, an dem Schwenkarm verriegelt wird. Mittels dieser Vorgehensweise ist das Raumabschlusselement zu keinem Zeitpunkt frei, unkontrolliert zu dem Schwenkarm zu verschwenken. Stattdessen findet gewissermaßen im Zuge der Öffnung der Raumabschlusseinrichtung eine Übergabe des Raumabschlusselements von dem Aufsatzkranz an den Schwenkarm statt. Die Verschwenkung des Raumabschlusselements relativ zu dem Schwenkarm ist mithin zu jedem Zeitpunkt kontrolliert und vorgegeben. Vor der Koppelung des Schwenkarms an einer zweiten Kopplungsstelle findet gleichwohl eine relative Verdrehung des Schwenkarms bezogen auf das Raumabschlusselement statt, solange letzteres an dem Aufsatzkranz verriegelt ist.
- Weiterhin kann eine solche Ausgestaltung der erfindungsgemäßen Raumabschlusseinrichtung von Vorteil sein, bei der der Schwenkarm mindestens ein weiteres Kopplungsmittel aufweist, mittels dessen das Raumabschlusselement und der Schwenkarm zusätzlich zu dem ersten genannten Kopplungsmittel miteinander verbindbar sind. Das weitere Kopplungsmittel ist dabei insbesondere in einem Abstand von dem ersten Kopplungsmittel an dem Schwenkarm ausgebildet, sodass beide Kopplungsmittel gemeinsam ein Kräftepaar aufnehmen und mithin ein Drehmoment abtragen können. Auf diese Weise kann das Raumabschlusselement verdrehfest an dem Schwenkarm verriegelt werden, sodass eine Drehung des Raumabschlusselements insbesondere um eine an den ersten Kopplungsmittel ausgebildete Drehachse unterbunden ist. Das weitere Kopplungsmittel kann beispielsweise in Abhängigkeit einer Auslenkung des Schwenkarms wirken, wobei insbesondere im Zuge der Überführung des Raumabschlusselements in dessen RWA-Position bei Bewegung des Flächenteils relativ zu dem Schwenkarm eine schlagartige Verlagerung des Schwerpunkts der Raumabschlusseinrichtung auftritt. Letztere kann in Abwesenheit des weiteren Kopplungsmittels dazu führen, dass das Raumabschlusselement insgesamt um die Drehachse relativ zu dem Schwenkarm verdreht wird. Dies ist mittels des weiteren Kopplungsmittels unterbindbar.
- In verfahrenstechnischer Hinsicht wird die zugrunde liegende Aufgabe erfindungsgemäß mittels des Verfahrens mit den Merkmalen des Anspruchs 13 gelöst. Vorteilhafte Ausgestaltungen ergeben sich aus den Unteransprüchen 14 bis 16.
- Aus dem Stand der Technik ist es bereits bekannt, ein Raumabschlusselement einer jeweiligen Raumabschlusseinrichtung mittels mindestens eines Antriebs ausgehend von einer Schließposition relativ zu dem jeweiligen Aufsatzkranz zu bewegen, wodurch das Raumabschlusselement zumindest teilweise aus seinem Dichtsitz gehoben und ein Strömungsquerschnitt zwischen dem Raum, der mittels der Raumabschlusseinrichtung gegen eine Umgebung abschließbar ist, und der Umgebung freigegeben wird. Weiterhin ist es bekannt, das Raumabschlusselement derart von dem Aufsatzkranz zu entfernen, dass es sich in seiner Notposition befindet, in der der Strömungsquerschnitt zwischen dem Raum und der Umgebung maximal freigegeben ist.
- Das "Entfernen" verlangt im Sinne der vorliegenden Anmeldung keine vollständige Demontage bzw. einen Abtransport des Raumabschlusselements, sondern lediglich eine Bewegung des Raumabschlusselements zumindest in Teilen weg von dem Aufsatzkranz. Insbesondere ist es im Stand der Technik bekannt, ein jeweiliges Raumabschlusselement um eine entlang eines seitlichen Randes des zugehörigen Aufsatzkranzes angeordnete Schwenkachse zu verschwenken, wobei zur Einnahme der RWA-Position das Raumabschlusselement um mindestens 90° verschwenkt wird und schließlich umschlägt. Die Verbindung zwischen Raumabschlusselement und Aufsatzkranz an der Schwenkachse bleibt dabei durchgehend bestehen; gleichwohl wird das Raumabschlusselement von dem Aufsatzkranz im Sinne der vorliegenden Anmeldung "entfernt".
- Das erfindungsgemäße Verfahren ist nunmehr durch die folgenden Verfahrensschritte gekennzeichnet:
- a) Das Raumabschlusselement wird in einem ersten Bewegungsabschnitt ausgehend von seiner Schließposition zumindest im Wesentlichen unter Beibehaltung seiner Ausrichtung zumindest teilweise von seinem Dichtsitz abgehoben.
- b) Das Raumabschlusselement wird in einem zweiten Bewegungsabschnitt relativ zu dem Aufsatzkranz verdreht, bis das Raumabschlusselement in einer Zwischenposition vorliegt.
- c) Ausgehend von der Zwischenposition wird zumindest ein Flächenteil des Raumabschlusselements translatorisch relativ zu dem Aufsatzkranz bewegt, bis sich das Raumabschlusselement in seiner RWA-Position befindet.
- Das erfindungsgemäße Verfahren ist mittels der erfindungsgemäßen Raumabschlusseinrichtung besonders einfach durchführbar. Es bietet den besonderen Vorteil, dass die Überführung des Raumabschlusselements in dessen RWA-Position im Vergleich zum Stand der Technik sehr schnell und zugleich mit besonders geringem apparativem Aufwand erfolgen kann. Dies betrifft auch den besonders geringen Hub, der zur Überführung des Raumabschlusselements bis in seine RWA-Position effektiv erforderlich ist. Dies führt zu dem Vorteil, dass der Antrieb, der für die Bewegung des Raumabschlusselements zuständig ist, nicht in derselben Weise dimensioniert werden muss wie im Stand der Technik, sondern vergleichsweise klein und schwach ausgeführt werden kann. Schließlich ist der Antrieb lediglich noch für die Bewegung des Raumabschlusselements in den beiden Bewegungsabschnitten zuständig, während die translatorische Bewegung zumindest des Flächenteils relativ zu dem Aufsatzkranz bzw. dem Schwenkarm ohne Wirkung des Antriebs erfolgen kann, sondern vorzugsweise allein mittels Wirkung der Gewichtskraft des Flächenteils betrieben wird.
- Im Zuge der Überführung des Raumabschlusselements in dessen RWA-Position wird vorteilhafterweise zumindest ein Flächenteil des Raumabschlusselements ausschließlich translatorisch bewegt. Diese Bewegung ist dann unabhängig von einer Verschwenkung des Raumabschlusselements um die Schwenkachse, sondern wirkt allein aufgrund einer bereits erreichten Schrägstellung des Flächenteils. Vorzugsweise wird die translatorische Bewegung allein durch eine Gewichtskraft zumindest des Flächenteils des Raumabschlusselements angetrieben. Eine solche Ausgestaltung ist zum einen besonders einfach durchzuführen, da kein gesonderter Antrieb für das Flächenteil erforderlich ist, zum anderen ist sie in höchstem Maße sicher, da sie unabhängig von einer Versorgung der Raumabschlusseinrichtung mit Elektrizität oder sonstiger Versorgung allein aufgrund wirkender Gewichtskraft erfolgt.
- Das erfindungsgemäße Verfahren weiter ausgestaltend wird das Raumabschlusselement ausschließlich mittels Wirkung der Schwerkraft von seiner Zwischenposition in seine RWA-Position überführt. Dies ist vorstehend bereits dargelegt. Diese Art des Betriebs der Raumabschlusseinrichtung hat den besonderen Vorteil, dass er stromlos erfolgen kann und somit in einer Notsituation besonders zuverlässig ist.
- Weiterhin ist ein solches Verfahren besonders zu bevorzugen, bei dem das Raumabschlusselement ausschließlich mittels Wirkung der Schwerkraft von seiner RWA-Position zurück in Richtung seiner Schließstellung überführt wird, wobei vorzugsweise zumindest das Flächenteil des Raumabschlusselements auf diese Weise von einer mit der RWA-Position des Raumabschlusselements korrespondierenden Notstellung in eine mit der Schließposition des Raumabschlusselements korrespondierenden Normalstellung bewegbar ist. Hierbei ist es nicht entscheidend, dass das Raumabschlusselement unmittelbar wieder in seiner Schließstellung angelangt. Stattdessen ist es eher vorteilhaft, wenn das Raumabschlusselement zunächst in eine zweite Zwischenposition überführt wird. Bei dieser Verfahrensweise bedarf es insbesondere keinem zusätzlichem Antrieb zum Betrieb der Raumabschlusseinrichtung, um diese letztlich zurück in ihre Schließposition zu überführen, die ausgehend von der zweiten Zwischenposition ohne Weiteres erreichbar ist.
- Wie vorstehend im Zusammenhang mit der Raumabschlusseinrichtung bereits ausgeführt kann es besonders vorteilhaft sein, wenn das Raumabschlusselement während des ersten Bewegungsabschnitts zumindest teilweise, vorzugsweise entlang eines Randes des Aufsatzkranzes, an dem Aufsatzkranz verriegelt ist, sodass das Raumabschlusselement während des ersten Bewegungsabschnitts lediglich teilweise von dem Aufsatzkranz abgehoben wird. Diese Verriegelung führt dazu, dass sich das Raumabschlusselement - ausgehend von einer in seinem Dichtsitz befindlichen horizontalen Ausrichtung - schräg stellt. Diese Vorgehensweise verhindert eine unkontrollierte Bewegung des Raumabschlusselements relativ zu dem Schwenkarm, die sich insbesondere in einer unkontrollierten Verdrehung des Raumabschlusselements um die Drehachse des Kopplungsmittels niederschlagen könnte.
- In einer weiterhin vorteilhaften Ausgestaltung des erfindungsgemäßen Verfahrens kann es besonders vorteilhaft sein, wenn der Schwenkarm derart gegen das Raumabschlusselement verriegelt wird, dass das Raumabschlusselement ohne vorherige Entriegelung nicht in seine RWA-Position überführt werden kann, wobei vorzugsweise die Verriegelung des Schwenkarms gegen das Raumabschlusselement zeitgleich mit einer Entriegelung des Raumabschlusselements von dem Aufsatzkranz stattfindet. Die Verriegelung des Schwenkarms gegen das Raumabschlusselement bietet zunächst den Vorteil, dass jegliche weitere Relativbewegung der beiden Bauteile zueinander unterbunden werden kann. Aufgrund der besonderen Bewegungscharakteristik, der es zur schwerkraftangetriebenen Überführung des Raumabschlusselements in die RWA-Position bedarf, können der Schwenkarm und das Raumabschlusselement jedoch typischerweise nicht durchgehend verdrehfest miteinander gekoppelt sein. Stattdessen ist es vorteilhaft, wenn beide Bauteile zumindest während des ersten Bewegungsabschnitts relativ zueinander verdrehen können, sodass ein Abheben des Raumabschlusselements von dem Aufsatzkranz grundsätzlich ermöglicht wird, wodurch wiederum der Aufbau eines Abstands zwischen dem Raumabschlusselement und dem Aufsatzkranz herstellbar wird. Der zweigeteilte Bewegungsablauf des Raumabschlusselements im Zuge der Überführung von seiner Schließposition in seine RWA-Position gelingt insbesondere infolge der Anordnung einer Angriffstelle des Antriebs an dem Schwenkarm in einem Abstand von dem Kopplungsmittel, mittels dessen das Raumabschlusselement und der Schwenkarm miteinander gekoppelt sind.
- Auf diese Weise kann das Raumabschlusselement insbesondere während eines ersten Bewegungsabschnitts angehoben werden, bis der Schwenkarm, der anfangs insbesondere schräg gegen eine Horizontale geneigt sein kann, zumindest im Wesentlichen eine horizontale Ausrichtung erreicht und sodann mit dem Raumabschlusselement zusammengeführt werden kann, das derweil teilweise an dem Aufsatzkranz verriegelt war. Im Moment des Kontakts zwischen Schwenkarm und Raumabschlusselement (abseits des Kopplungsmittels) kann dann die Verriegelungseinrichtung gelöst und mithin die Verriegelung des Raumabschlusselements gegen den Aufsatzkranz aufgehoben werden. Vorzugsweise zeitgleich wird das Raumabschlusselement an dem Schwenkarm verriegelt bzw. mit diesem gekoppelt und von letzterem im Zuge der weiteren Bewegung des Schwenkarms "mitgenommen". In diesem zweiten Bewegungsabschnitt wird das Raumabschlusselement schließlich vollständig von seinem Dichtsitz abgehoben und wird mit fortschreitender Verschwenkung des Schwenkarms zunehmend gegen die Horizontale geneigt. Auf diese Weise kann das Raumabschlusselement dauerhaft kontrolliert bis in seine Zwischenposition überführt werden, von der aus das Abgleiten in die RWA-Position allein mittels Schwerkraft möglich ist. Hierzu ist lediglich das Verriegelungselement zu lösen, sodass der Bewegungsrahmen freigegeben wird.
- Die erfindungsgemäße Raumabschlusseinrichtung und das erfindungsgemäße Verfahren werden nachstehend anhand eines Ausführungsbeispiels, das in den Figuren dargestellt ist, näher erläutert. Es zeigt:
- Fig. 1:
- Einen Querschnitt durch eine erfindungsgemäße Raumabschlusseinrichtung bei Vorliegen eines Raumabschlusselements in einer Schließposition,
- Fig. 2:
- Den Querschnitt gemäß
Figur 1 , wobei das Raumabschlusselement in einer Kopplungsposition vorliegt, - Fig. 3:
- Den Querschnitt gemäß
Figur 1 , wobei das Raumabschlusselement in einer Zwischenposition vorliegt, - Fig. 4:
- Den Querschnitt gemäß
Figur 1 , wobei Schwenkarme, die mit dem Raumabschlusselement zusammenwirken, in einer Vorposition vorliegen, - Fig. 5:
- Den Querschnitt gemäß
Figur 1 , wobei die Schwenkarme in einer Auslenkposition vorliegt, - Fig. 6:
- Den Querschnitt gemäß
Figur 1 , wobei das Raumabschlusselement in einer RWA-Position vorliegt, - Fig. 7:
- Den Querschnitt gemäß
Figur 1 , wobei die Schwenkarme in einer Rückposition vorliegen, - Fig. 8:
- Den Querschnitt gemäß
Figur 1 , wobei ein Flächenteil des Raumabschlusselements in einer Normalstellung vorliegt und - Fig. 9:
- Den Querschnitt gemäß
Figur 1 , wobei das Raumabschlusselement in seiner Schließposition vorliegt. - Das Ausführungsbeispiel, das in den
Figuren 1 bis 9 gezeigt ist, umfasst eine erfindungsgemäße Raumabschlusseinrichtung 1, die einen Aufsatzkranz 2 sowie ein Raumabschlusselement 3 umfasst. Der Aufsatzkranz 2 ist hier von einem vierseitigen Korpus gebildet, der vier in sich gerade Seitenwandungen 16 aufweist. Die Seitenwandungen 16 definieren jeweils einen Rand 15 des Aufsatzkranzes 2. An einer oberen Stirnfläche weist der Aufsatzkranz 2 eine umlaufende Dichtfläche auf, die innerhalb einer Dichtebene 13 angeordnet ist. Das Raumabschlusselement 3, das in der inFigur 1 gezeigten Stellung in seiner Schließposition vorliegt, liegt derart auf dem Aufsatzkranz 2 auf, dass es dichtend mit selbigem zusammenwirkt. Auf diese Weise ist eine strömungstechnische Verbindung zwischen einem Raum, der mittels der Raumabschlusseinrichtung 1 gegen eine Umgebung abgetrennt ist, und der Umgebung unterbrochen. Insbesondere schließt das Raumabschlusselement 3 luftdicht mit dem Aufsatzkranz 2 ab. - Um das Raumabschlusselement 3 ausgehend von seiner Schließposition in Richtung einer RWA-Position überführen zu können, insbesondere um eine Belüftung des Raumes ermöglichen zu können, wirkt das Raumabschlusselement 3 mit einem Antrieb 4 zusammen. Letzterer ist hier von einer elektrischen Antriebseinheit gebildet, mittels der eine Druckkraft ausübbar ist. Der Antrieb 4 wirkt hier unmittelbar mit zwei Übertragungseinrichtungen 5 zusammen, mittels derer die mittels des Antriebs 4 bewirkte Kraft auf das Raumabschlusselement 3 übertragbar ist. Die Übertragungseinrichtungen 5 sind hier jeweils von einem Schwenkarm 7 gebildet und somit jeweils einstückig, wobei ein jeweiliger Schwenkarm 7 unter Ausbildung einer gemeinsamen Schwenkachse 8 an einem Rand 15 des Aufsatzkranzes 2 angeordnet sind. In dem Beispiel erfolgt dies mittels Montagelaschen, die in Kraft übertragender Weise an dem Aufsatzkranz 2 befestigt sind. Die Montagelaschen wirken mit den Schwenkarmen 7 zusammen. Die Schwenkarme 7 sind beidseits des Raumabschlusselements 3 angeordnet. Eine Angriffsstelle des Antriebs 4 an einem jeweiligen Schwenkarm 7 befindet sich in einem Abstand von der Schwenkachse 8, sodass die Angriffsstelle unter einem Hebelarm 10 relativ zu der Schwenkachse 8 angeordnet ist. Auf diese Weise ist es mittels Betriebs des Antriebs 4 möglich, die Schwenkarme 7 um die Schwenkachse 8 zu verschwenken. Grundsätzlich ist es denkbar, jeden der Schwenkarme 7 mit einem eigenen Antrieb 4 auszustatten; in besonders vorteilhafter Weise wird jedoch eine mittels eines Antriebs 4 zur Verfügung gestellte Kraft auf beide Schwenkarme 7 verteilt oder lediglich einer der Schwenkarme 7 unmittelbar mittels des Antriebs 4 bewegt. Der jeweils andere Schwenkarm 7 wird in letzterer Konstellation über das Raumabschlusselement 3 mitgeschleppt. Die im Weiteren vorgenommene Beschreibung bezieht sich lediglich auf einen der Schwenkarme 7, betrifft jedoch in der Ausgestaltung grundsätzlich beide Schwenkarme 7.
- Der Schwenkarm 7 ist mit dem Raumabschlusselement 3 mittels eines Kopplungsmittels 9 unmittelbar in Kraft übertragender Weise verbunden. Dies hat zur Folge, dass eine Bewegung des Schwenkarms 7 unmittelbar auch eine Bewegung des Raumabschlusselements 3 bewirkt. Das Kopplungsmittel 9 ist hier als Lasche 17 ausgebildet, die mit dem Raumabschlusselement 3 unter Ausbildung einer Drehachse 19 zusammenwirkt. In dem gezeigten Beispiel sind die Schwenkarme 7 jeweils in sich gerade ausgebildet und weisen jeweils eine Längsachse 26 auf. Die Kopplungsmittel 9 beider Schwenkarme 7 weisen jeweils eine Drehachse 19 auf, um die das Raumabschlusselement 3 relativ zu dem Schwenkarm 7 verdrehbar ist. Die Kopplungsmittel 9 sind dabei an beiden Schwenkarmen 7 gleichartig positioniert, sodass die Drehachsen 19 beider Kopplungsmittel 9 übereinstimmen. Die "gemeinsame Drehachse" 19 ist hier in vorteilhafter Weise parallel zu der Schwenkachse 8 des Raumabschlusselements 3 angeordnet.
- Ein Abstand 18, in dem das Kopplungsmittel 9 an dem Schwenkarm 7 angeordnet ist, entspricht in dem gezeigten Beispiel etwa 50 % einer gesamten Länge des Schwenkarms 7. Diese Positionierung hat zur Folge, dass das Raumabschlusselement 3 nicht allein aufgrund seiner Gewichtskraft um die Drehachse 19 dreht, sondern im Zuge der Bewegung der Schwenkarme 7 zumindest im Wesentlichen seine rotatorische Position beibehalten kann. Da das Raumabschlusselement 3 in dem gezeigten Beispiel jedoch entlang eines Randes 27 mit dem Aufsatzkranz 2 verbunden ist, wird das Raumabschlusselement 3 im Zuge der Anhebung der Schwenkarme 7 in eine in
Figur 2 dargestellte geneigte Kopplungsposition bewegt. Bei Erreichen dieser Kopplungsposition wird der Schwenkarm 7 mit einem an seinem der Schwenkachse 8 abgewandten Ende angeordneten Kopplungsmittel 21 an einen Bewegungsrahmen 11 des Raumabschlusselements 3 angekoppelt, sodass der Bewegungsrahmen 11 und der Schwenkarm 7 an der Stelle des Kopplungsmittels 21 miteinander verbunden sind. Bis zum Erreichen der Kopplungsposition kann das Raumabschlusselement 3 um die Drehachse 19 relativ zu dem Schwenkarm 7 verdreht werden. - Bei Erreichen der Kopplungsposition wird zumindest im Wesentlichen zur gleichen Zeit die Verbindung zwischen dem Rand 27 des Raumabschlusselements 3 und dem Aufsatzkranz 2 aufgehoben. Auf diese Weise führt ein weiterer Betrieb des Antriebs 4 zu einem vollständigen Abheben des Raumabschlusselements 3 aus seinem Dichtsitz, wobei eine Drehposition des Raumabschlusselements 3 relativ zu den Schwenkarmen 7 mittels des Kopplungsmittels 21 sicher gehalten wird. Eine Verdrehung der beiden Bauteile relativ zueinander ist dann nicht mehr möglich. Auf diese Weise ist eine unkontrollierte Bewegung des Raumabschlusselements 3 um die Drehachsen 19 unterbunden. Mittels der erfolgten Abhebung des Raumabschlusselements 3 ist sodann ein umlaufender Strömungsquerschnitt 6 freigegeben, der einen Luftaustausch zwischen dem Raum und der Umgebung ermöglicht. Mit anderen Worten befindet sich das Raumabschlusselement 3 vollständig in einer von der Dichtebene 13 entfernten Position und ist folglich vollständig aus seinem Dichtsitz abgehoben. Eine solche in
Figur 3 dargestellte Zwischenposition des Raumabschlusselements 3 ist beispielsweise geeignet, um den jeweiligen Raum zu belüften. - Die an den der Schwenkachse 8 abgewandten Enden der Schwenkarme 7 angeordneten Kopplungsmittel 21 sind hier jeweils von einem mechanischen Verriegelungsschloss gebildet. Das Kopplungsmittel 21 ist dazu geeignet, mit einem komplementären Kopplungsmittel des Bewegungsrahmens 11 des Raumabschlusselements 3 formschlüssig zusammenzuwirken und auf diese Weise eine Kraft übertragende, zerstörungsfrei lösbare Koppelung herzustellen.
- Die Ausgestaltung des Raumabschlusselements 3 mit einem Bewegungsrahmen 11 ist besonders vorteilhaft. Letzterer steht in unmittelbarem Eingriff mit den Schwenkarmen 7. Das genannte Kopplungsmittel des Raumabschlusselements 3, das mit dem Kopplungsmittel 21 eines jeweiligen Schwenkarms 7 zusammenwirkt, ist an dem Bewegungsrahmen 11 ausgebildet. Dieser Bewegungsrahmen 11 ist in dem gezeigten Beispiel mit zwei Teleskopschienen ausgestattet, wobei jeweils eine der Teleskopschienen mit einem der Schwenkarme 7 zusammenwirkt. Die Fixierung des Bewegungsrahmens 11 an den Schwenkarmen 7 mittels zweier Kopplungsmittel 9, 21 dient dazu, eine Drehmoment übertragende Lagerung des Raumabschlusselements 3 an den Schwenkarmen 7 zu ermöglichen, die eine unkontrollierte Verdrehung des Raumabschlusselements 3 relativ zu den Schwenkarmen 7 verhindert. Die Notwendigkeit hierfür ergibt sich anhand der
Figuren 4 und5 . Diese veranschaulichen das Raumabschlusselement 3 zunächst bei Vorliegen der Schwenkarme 7 in ihrer Vorposition und schließlich in ihrer Auslenkposition, von der ausgehend das Raumabschlusselement 3 in dessen RWA-Position überführbar ist. Letzteres ist inFigur 5 dargestellt. Die Koppelung in einer Drehmoment übertragenden Weise ist erforderlich, da das Raumabschlusselement 3 sich ansonsten um seine Drehachse 19 relativ zu den Schwenkarmen 7 auf die Schwenkachse 8 zu verdrehen würde. Dies würde in dem gezeigten Beispiel die Überführung des Raumabschlusselements 3 in dessen RWA-Position verhindern. - In besagter RWA-Position ist der Strömungsquerschnitt 6 zwischen der Umgebung und dem Raum maximal freigegeben, sodass insbesondere eine notfallmäßige Entlüftung des Raumes stattfinden kann. Diese "maximale Freigabe" des Strömungsquerschnitts 6 besteht hier darin, dass ein Querschnitt des Aufsatzkranzes 2 im Bereich der Dichtebene 13 vollständig freigegeben ist und somit vollständig als Strömungsquerschnitt 6 zur Verfügung steht. Eine Belüftung des Raumes ist folglich in diesem Zustand genauso gut möglich, als wäre das Raumabschlusselement 3 nicht vorhanden. Diese Art der Notlüftung ist vorwiegend im Brandfall von Bedeutung.
- Um das Raumabschlusselement 3 in seine RWA-Position zu überführen, werden die Schwenkarme 7 mittels des Antriebs 4 ausgehend von der in
Figur 3 gezeigten Zwischenposition weiter um die Schwenkachse 8 verschwenkt, sodass die Schwenkarme 7 gemeinsam mit dem Raumabschlusselement 3 in eine zunehmend schräge Position überführt werden. In dieser schrägen Position der Schwenkarme 7 ist das Raumabschlusselement 3 unter einem Winkel gegenüber der Dichtebene 13 orientiert. Die Schwenkarme 7 werden soweit ausgelenkt, bis der genannte Winkel den Wert eines Grenzwinkels 24 annimmt. Dieser ist inFigur 5 veranschaulicht. Bei Erreichen dieses Grenzwinkels 24 liegen die Schwenkarme 7 in ihrer Auslenkposition vor, wobei das Raumabschlusselement 3 derart schräg angeordnet ist, dass ein Flächenteil 12 desselben allein aufgrund seiner Gewichtskraft sich relativ zu den Schwenkarmen 7 translatorisch bewegen kann. Eine solche Bewegung wird mittels des Bewegungsrahmens 11 ermöglicht, der die vorstehend beschriebenen Teleskopschienen aufweist. - Zur letztendlichen Überführung des Raumabschlusselements 3 in seine RWA-Position wird nunmehr ein Rastmittel 14 des Raumabschlusselements 3 gelöst, wodurch das Flächenteil 12 von dem Bewegungsrahmen 11 entkoppelt wird und sich relativ zu letzterem bewegen kann. Infolgedessen bewegt sich das Flächenteil 12 - angetrieben allein durch dessen Gewichtskraft - translatorisch relativ zu den Schwenkarmen 7, sodass es vollständig aus einem Öffnungsbereich des Aufsatzkranzes 2 "herausgefahren wird". Der Strömungsquerschnitt 6 zwischen dem Raum und der Umgebung ist somit vollständig freigegeben, sodass eine Luftströmung insbesondere aus dem Raum heraus in vertikale Richtung nach oben in die Umgebung hindernisfrei erfolgen kann. Der Strömungsquerschnitt 6 entspricht dabei im Wesentlichen einem Öffnungsquerschnitt des Aufsatzkranzes 2.
- Bei Betrachtung der in
Figur 6 dargestellten RWA-Position des Raumabschlusselements 3 erschließt sich unmittelbar der Zweck der beiden Kopplungsmittel 9, 21 eines jeweiligen Schwenkarms 7. Eine Lagerung des Raumabschlusselements 3 lediglich mittels des ersten Kopplungsmittels 9 würde eine Verdrehung des Raumabschlusselements 3 um die Drehachse 19 zur Folge haben, da der Schwerpunkt des Raumabschlusselements 3 infolge der Bewegung des Flächenteils weit in Richtung der Schwenkachse 8 verlagert wird. Ein solches "Kippen" des Raumabschlusselements 3 um die Drehachse 19 könnte dazu führen, dass das Flächenteil 12 im Zuge seines "Abrutschens" mit dem der Schwenkachse 8 zugewandten Rand 15 des Aufsatzkranzes 2 kollidiert. Eine zuverlässige Öffnung der Raumabschlusseinrichtung 1 wäre damit verhindert. - Das Rastmittel 14 ist vorteilhafterweise derart an den jeweiligen Schwenkarm 7 gekoppelt, dass es die translatorische Bewegung zwischen Flächenteil 12 und Bewegungsrahmen 11 automatisch freigibt, sobald die Schwenkarme 7 um ein solches Maß um die Schwenkachse 8 verschwenkt sind, dass das Raumabschlusselement 3 unter Ausbildung des Grenzwinkels 24 relativ zu der Dichtebene 13 angeordnet ist. Die Schwenkarme 7 liegen dann in ihrer jeweiligen Auslenkposition vor.
- Im Unterschied zum Stand der Technik ergibt sich, dass ein gesamter Hub, um den ein Kolben 22 des Antriebs 4 aus dem zugehörigen Zylinder 23 ausgefahren werden muss, im Vergleich zum Stand der Technik besonders klein ist, da das Raumabschlusselement 3 insbesondere nicht um 90° oder mehr gegenüber der Dichtebene 13 verschwenkt werden muss. Der geringere Schwenkwinkel hat zur Folge, dass die Bewegung des Raumabschlusselements 3 insgesamt deutlich kürzer ausfallen kann, wodurch im Ergebnis die Gesamtdauer der Überführung des Raumabschlusselements 3 von seiner Schließposition in seine RWA-Position deutlich kürzer ausfällt, als dies im Stand der Technik möglich ist. Gleichzeitig kann der Antrieb 4 erheblich kleiner dimensioniert werden als im Stand der Technik, wodurch sich zudem ein Kostenvorteil einstellt.
- Nach der Überführung des Raumabschlusselements 3 in seine RWA-Position kann es von Interesse sein, selbiges wieder zurück in seine Schließposition zu bewegen. Insbesondere kann beispielsweise ein Feueralarm, der die Bewegung des Raumabschlusselements 3 initiiert hat, ein Fehlalarm gewesen sein, nach dessen Ende der ursprüngliche Zustand der Raumabschlusseinrichtung 1 wiederhergestellt werden soll. Im Stand der Technik ist dies oftmals gar nicht möglich, da die Überführung des jeweiligen Raumabschlusselements 3 in dessen RWA-Position nicht zerstörungsfrei erfolgt.
- In dem gezeigten Beispiel ist die Rücküberführung des Raumabschlusselements 3 hingegen besonders einfach möglich. Dies ergibt sich besonders gut anhand der
Figuren 7 bis 9 . Zunächst werden die Schwenkarme 7 mittels des Antriebs 4 um die Schwenkachse 8 zurück geschwenkt, bis Längsachsen 26 der Schwenkarme 7 unter einem Winkel 25 relativ zu der horizontalen Dichtebene 13 angeordnet sind. Die Schwenkarme 7 liegen dann in ihrer Rückposition vor. Diese ergibt sich ausFigur 7 . Der Winkel 25 zwischen der Längsachse 26 und der Dichtebene 13 bei Vorliegen der Schwenkarme 7 in dieser Rückposition ist bezogen auf die Dichtebene 13 negativ, während der oben beschriebene Grenzwinkel 24 bei Vorliegen der Schwenkarme 7 in deren Auslenkposition positiv ist. Die Neigung der in ihrer Rückposition vorliegenden Schwenkarme 7 führt dazu, dass die Gewichtskraft des Flächenteils 12 eine horizontale Komponente in Richtung des Aufsatzkranzes 2 erhält. Dies führt wiederum dazu, dass das Flächenteil 12 allein durch Wirkung der Schwerkraft mittels des Bewegungsrahmens 11 ausgehend von seiner Notstellung in seine Normalstellung zurückbewegt wird. Das Ergebnis dieses Vorgangs ist besonders gut anhand vonFigur 8 erkennbar. - Mittels weiterer Absenkung der Schwenkarme 7 wird das Raumabschlusselement 3 sodann wieder in der gewünschten Weise in seinen Dichtsitz gelegt, sodass das Raumabschlusselement 3 zumindest regendicht, vorzugsweise luftdicht, gegen den Aufsatzkranz 2 abdichtet. Folglich liegt das Raumabschlusselement 3 letztlich wieder in seiner Schließposition vor, die sich aus
Figur 9 ergibt. Hierbei wird das Raumabschlusselement 3 zunächst mit seinem einen Rand 27 auf den Aufsatzkranz 2 aufgelegt. Der Rand 27 wird sodann in Kraft übertragender Weise mit dem Aufsatzkranz 2 gekoppelt und gleichzeitig das Kopplungsmittel 21 zur Verbindung der Schwenkarme 7 und des Bewegungsrahmens 11 gelöst. Auf diese Weise können die Schwenkarme 7 fortan wieder relativ zu dem Bewegungsrahmen 11 um die Drehachse 9 verschwenkt werden. Das Raumabschlusselement 3 befindet sich in diesem Moment in der inFigur 2 gezeigte Ausrichtung. Anschließend wird mittels weiteren Einfahrens des Antriebs 4 letztlich die inFigur 9 gezeigte Schließposition erreicht. -
- 1
- Raumabschlusseinrichtung
- 2
- Aufsatzkranz
- 3
- Raumabschlusselement
- 4
- Antrieb
- 5
- Übertragungseinrichtung
- 6
- Strömungsquerschnitt
- 7
- Schwenkarm
- 8
- Schwenkachse
- 9
- Kopplungsmittel
- 10
- Hebelarm
- 11
- Bewegungsrahmen
- 12
- Flächenteil
- 13
- Dichtebene
- 14
- Rastmittel
- 15
- Rand
- 16
- Seitenwandung
- 17
- Lasche
- 18
- Abstand
- 19
- Drehachse
- 20
- Abschnitt
- 21
- Kopplungsmittel
- 22
- Kolben
- 23
- Zylinder
- 24
- Grenzwinkel
- 25
- Winkel
- 26
- Längsachse
- 27
- Rand
Claims (16)
- Öffenbare Raumabschlusseinrichtung (1), insbesondere eine Lichtkuppel, zum Abschluss eines Raums gegen eine Umgebung, umfassend- einen Aufsatzkranz (2),- ein Raumabschlusselement (3),- einen Antrieb (4) sowie- mindestens eine Übertragungseinrichtung (5),wobei das Raumabschlusselement (3) mittels des Antriebs (4) relativ zu dem Aufsatzkranz (2) bewegbar ist,wobei mittels der Übertragungseinrichtung (5) eine von dem Antrieb (4) zur Verfügung gestellte Antriebskraft auf das Raumabschlusselement (3) übertragbar ist,wobei das Raumabschlusselement (3) bei Vorliegen in einer Schließposition derart umlaufend mit dem Aufsatzkranz (2) in Kontakt steht, dass es den Raum zumindest regendicht gegen die Umgebung abschließt,wobei das Raumabschlusselement (3) bei Vorliegen in einer RWA-Position derart von dem Aufsatzkranz (2) entfernt ist, dass ein Strömungsquerschnitt (6), der eine strömungstechnische Verbindung zwischen dem Raum und der Umgebung bildet, maximal freigegeben ist,wobei die Übertragungseinrichtung (5) mindestens einen langgestreckten Schwenkarm (7) umfasst, der um eine Schwenkachse (8) verschwenkbar an dem Aufsatzkranz (2) gelagert ist,wobei mindestens ein Kopplungsmittel (9), mittels dessen das Raumabschlusselement (3) und der Schwenkarm (7) in Kraft übertragender Weise miteinander verbunden sind, in einem Abstand von der Schwenkachse (8) angeordnet ist,wobei der Antrieb (4) unter Ausbildung eines Hebelarms (10) bezogen auf die Schwenkachse (8) an dem Schwenkarm (7) angreift, sodass der Schwenkarm (7) mittels des Antriebs (4) um die Schwenkachse (8) verschwenkbar ist,dadurch gekennzeichnet, dassdas Raumabschlusselement (3) mindestens einen Bewegungsrahmen (11) umfasst, mittels dessen zumindest ein Flächenteil (12) des Raumabschlusselements (3) relativ zu dem Schwenkarm (7) bewegbar ist,wobei der Bewegungsrahmen (11) mindestens ein Schienensystem umfasst,wobei zumindest das Flächenteil (12) des Raumabschlusselements (3) mittels des Schienensystems translatorisch relativ zu dem Schwenkarm (7) bewegbar ist.
- Raumabschlusseinrichtung (1) nach Anspruch 1, dadurch gekennzeichnet, dass das Raumabschlusselement (3) und der Schwenkarm (7) bei Vorliegen des Raumabschlusselements (3) in dessen RWA-Position miteinander verbunden sind.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Schienensystem des Bewegungsrahmens (11) in Form einer Teleskopschiene ausgebildet ist.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Raumabschlusselement (3) mittels Bewegung seines Flächenteils (12) relativ zu dem Schwenkarm (7) in seine RWA-Position überführbar ist, vorzugsweise ausschließlich mittels Wirkung einer Gewichtskraft des Flächenteils (12).
- Raumabschlusseinrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Flächenteil (12) wiederholt zwischen einer mit der Schließposition des Raumabschlusselements (3) korrespondierenden Normalstellung und einer mit der RWA-Position des Raumabschlusselements (3) korrespondierenden Notstellung bewegbar ist.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass sich der Schwenkarm (7) bei Vorliegen des Raumabschlusselements (3) in dessen RWA-Position in einer derart um die Schwenkachse (8) verdrehten Auslenkposition befindet, dass zumindest ein Teil des Schwenkarms (7) über eine Dichtebene (13) des Aufsatzkranzes (2) hinaus nach außen vorsteht, wobei vorzugsweise zumindest ein Abschnitt (20) des Schwenkarms (7) geneigt gegenüber der Dichtebene (13) orientiert ist.
- Raumabschlusseinrichtung (1) nach Anspruch 6, dadurch gekennzeichnet, dass das Raumabschlusselement (3) mindestens ein Rastmittel (14) umfasst, das eine translatorische Bewegung des Flächenteils (12) relativ zu dem Schwenkarm (7) zumindest solange verhindert, bis der Schwenkarm (7) in seiner Auslenkposition vorliegt, wobei vorzugsweise bei Erreichen der Auslenkposition das Rastmittel (14) selbsttätig die Bewegung des Flächenteils (12) freigibt.
- Raumabschlusseinrichtung nach Anspruch 6 oder 7, dadurch gekennzeichnet, dass der Schwenkarm (7) ausgehend von seiner Auslenkposition in eine Rückposition bewegbar ist, bei deren Vorliegen zumindest ein Abschnitt (20) des Schwenkarms (7) im Vergleich zu der Auslenkposition umgekehrt geneigt gegen die Dichtebene (13) des Aufsatzkranzes (2) orientiert ist, sodass vorzugsweise der Flächenteil (12) des Raumabschlusselements (13) ausschließlich mittels Wirkung der Gewichtskraft des Flächenteils (12) von dessen Notstellung zurück in dessen Normalstellung bewegbar ist.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, gekennzeichnet durch mindestens eine Verriegelungseinrichtung, mittels der zumindest ein Teil des Raumabschlusselements (3) derart an dem Aufsatzkranz (2) verriegelbar ist, dass das Raumabschlusselement (3) im Zuge der Überführung von seiner Schließposition in Richtung einer Offenposition zumindest in einem ersten Bewegungsabschnitt des Raumabschlusselements (3) lediglich teilweise von dem Aufsatzkranz (2) abhebbar ist.
- Raumabschlusseinrichtung (1) nach Anspruch 9, dadurch gekennzeichnet, dass die Verriegelungseinrichtung mit einem dem Antrieb (4) zugewandten Rand (27) des Raumabschlusselements (3) zusammenwirkt, sodass das Raumabschlusselement (3) im Zuge des Anhebens des Schwenkarms (7) zunächst an der dem Antrieb (4) abgewandten Seite von dem Aufsatzkranz (2) löst.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Schwenkarm (7) und das Raumabschlusselement (3) zumindest bei Vorliegen des Raumabschlusselements (3) in seiner Schließposition ausschließlich an einer Stelle mittels eines Kopplungsmittels (9), vorzugsweise unter Ausbildung einer Drehachse (19), miteinander verbunden sind, sodass das Raumabschlusselement (3) im Zuge einer Anhebung des Schwenkarms (7) mittels des Antriebs (4) relativ zu dem Schwenkarm (7) verdrehbar ist.
- Raumabschlusseinrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Schwenkarm (7) mindestens ein weiteres Kopplungsmittel (21) aufweist, mittels dessen das Raumabschlusselement (3) und der Schwenkarm (7) zusätzlich zu dem ersten genannten Kopplungsmittel (9) miteinander verbindbar sind.
- Verfahren zur Öffnung einer Raumabschlusseinrichtung (1) zum Abschluss eines Raums gegen eine Umgebung, die Raumabschlusseinrichtung (1) umfassend- einen Aufsatzkranz (2),- ein Raumabschlusselement (3),- einen Antrieb (4) sowie- mindestens eine Übertragungseinrichtung (5),wobei das Raumabschlusselement (3) mittels des Antriebs (4) relativ zu dem Aufsatzkranz (2) bewegbar ist,wobei mittels der Übertragungseinrichtung (5) eine von dem Antrieb (4) zur Verfügung gestellte Antriebskraft auf das Raumabschlusselement (3) übertragbar ist,wobei das Raumabschlusselement (3) bei Vorliegen in einer Schließposition derart umlaufend mit dem Aufsatzkranz (2) in Kontakt steht, dass es den Raum zumindest regendicht gegen die Umgebung abschließt,wobei das Raumabschlusselement (3) bei Vorliegen in einer RWA-Position derart von dem Aufsatzkranz (2) entfernt ist, dass ein Strömungsquerschnitt (6), der eine strömungstechnische Verbindung zwischen dem Raum und der Umgebung bildet, maximal freigegeben ist,wobei die Übertragungseinrichtung (5) mindestens einen langgestreckten Schwenkarm (7) umfasst, der um eine Schwenkachse (8) verschwenkbar an dem Aufsatzkranz (2) gelagert ist,wobei mindestens ein Kopplungsmittel (9), mittels dessen das Raumabschlusselement (3) und der Schwenkarm (7) in Kraft übertragender Weise miteinander verbunden sind, in einem Abstand von der Schwenkachse (8) angeordnet ist,wobei der Antrieb (4) unter Ausbildung eines Hebelarms (10) bezogen auf die Schwenkachse (8) an dem Schwenkarm (7) angreift, sodass der Schwenkarm (7) mittels des Antriebs (4) um die Schwenkachse (8) verschwenkbar ist,wobei das Raumabschlusselement (3) mindestens einen Bewegungsrahmen (11) umfasst, mittels dessen zumindest ein Flächenteil (12) des Raumabschlusselements (3) relativ zu dem Schwenkarm (7) bewegbar ist,wobei der Bewegungsrahmen (11) mindestens ein Schienensystem umfasst,wobei zumindest das Flächenteil (12) des Raumabschlusselements (3) mittels des Schienensystems translatorisch relativ zu dem Schwenkarm (7) bewegbar ist,das Verfahren umfassend die folgenden Verfahrensschritte:a) Das Raumabschlusselement (3) wird mittels des Antriebs (4) ausgehend von einer Schließposition relativ zu dem Aufsatzkranz (2) bewegt, wodurch das Raumabschlusselement (3) zumindest teilweise aus seinem an dem Aufsatzkranz (2) ausgebildeten Dichtsitz gehoben wird, sodass der Strömungsquerschnitt (6) zwischen dem Raum und der Umgebung freigegeben wird;b) Das Raumabschlusselement (3) wird derart von dem Aufsatzkranz (2) entfernt, dass es sich in seiner RWA-Position befindet, in der der Strömungsquerschnitt (6) maximal freigegeben ist;c) Das Raumabschlusselement (3) wird in einem ersten Bewegungsabschnitt ausgehend von seiner Schließposition zumindest teilweise von seinem Dichtsitz abgehoben;d) Das Raumabschlusselement (3) wird in einem zweiten Bewegungsabschnitt relativ zu dem Aufsatzkranz (2) verdreht, bis das Raumabschlusselement (3) in einer Zwischenposition vorliegt;e) Ausgehend von der Zwischenposition wird zumindest ein Flächenteil (12) des Raumabschlusselements (3) translatorisch relativ zu dem Aufsatzkranz (2) bewegt, bis sich das Raumabschlusselement (3) in seiner RWA-Position befindet,dadurch gekennzeichnet, dassdas Flächenteil (12) mittels des Schienensystems translatorisch relativ zu dem Schwenkarm (7) bewegt wird.
- Verfahren nach Anspruch 13, dadurch gekennzeichnet, dass das Raumabschlusselement (3) während des ersten Bewegungsabschnitts zumindest teilweise, vorzugsweise entlang eines Randes (27) des Aufsatzkranzes (2), an dem Aufsatzkranz (2) verriegelt ist, sodass das Raumabschlusselement (3) während des ersten Bewegungsabschnitts lediglich teilweise von dem Aufsatzkranz (2) abgehoben wird.
- Verfahren nach Anspruch 13 oder 14, dadurch gekennzeichnet, dass der Schwenkarm (7) derart gegen das Raumabschlusselement (3) verriegelt wird, dass das Raumabschlusselement (3) ohne vorherige Entriegelung nicht in seine RWA-Position überführt werden kann, wobei vorzugsweise die Verriegelung des Schwenkarms (7) gegen das Raumabschlusselement (3) zeitgleich mit einer Entriegelung des Raumabschlusselements (3) von dem Aufsatzkranz (2) stattfindet.
- Verfahren nach einem der Ansprüche 13 bis 15, dadurch gekennzeichnet, dass das Raumabschlusselement (3) ausschließlich mittels Wirkung der Schwerkraft von seiner RWA-Position in Richtung seiner Schließposition überführt wird, wobei vorzugsweise zumindest das Flächenteil (12) des Raumabschlusselements (3) auf diese Weise von einer mit der RWA-Position des Raumabschlusselements (3) korrespondierenden Notstellung in eine mit der Schließposition des Raumabschlusselements (3) korrespondierenden Normalstellung bewegbar ist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018115783.5A DE102018115783A1 (de) | 2018-06-29 | 2018-06-29 | Öffenbare Raumabschlusseinrichtung sowie Verfahren zu deren Öffnung |
| DE102018132222.4A DE102018132222A1 (de) | 2018-12-14 | 2018-12-14 | Öffenbare Raumabschlusseinrichtung sowie Verfahren zu deren Öffnung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3587696A1 EP3587696A1 (de) | 2020-01-01 |
| EP3587696B1 true EP3587696B1 (de) | 2024-12-11 |
Family
ID=67105877
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19182886.2A Active EP3587696B1 (de) | 2018-06-29 | 2019-06-27 | Öffenbare raumabschlusseinrichtung sowie verfahren zu deren öffnung |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP3587696B1 (de) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE664961A (de) * | 1964-06-05 | 1965-10-01 | ||
| DE2412154B2 (de) * | 1973-04-21 | 1977-06-16 | Göbel, Klaus, 5500 Trier | Auf einem rahmen angeordnete, in der ebene des rahmens verschiebbare lichtkuppel |
| DE8808856U1 (de) * | 1988-07-09 | 1988-08-25 | Grescha-Gesellschaft mbH & Co Grefe & Scharf, 4817 Leopoldshöhe | Rauchabzugs- und Lüftungsklappe |
| DE29921090U1 (de) * | 1999-12-01 | 2001-04-12 | Stürmann GmbH & Co., 40699 Erkrath | Rauchabzugs- oder Lüftungsklappe |
| BE1014531A5 (nl) * | 2001-12-07 | 2003-12-02 | Plastics N V Ag | Inrichting voor het openen van ontluchtingskoepels voor rook-en warmteafvoer en verluchting. |
| DE102009059107B4 (de) * | 2009-12-18 | 2011-09-01 | Andreas Grasl | Gelenkanordnung zur Betätigung einer Klappe, insbesondere Entrauchungsklappe |
-
2019
- 2019-06-27 EP EP19182886.2A patent/EP3587696B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3587696A1 (de) | 2020-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2712380B1 (de) | Aussteller für kraftfahrzeugtüren und -klappen | |
| EP3243997B1 (de) | Fluchttür | |
| WO2001055543A1 (de) | Sektionalhub- oder falttor | |
| EP3822438B1 (de) | Automatikschloss | |
| EP3643849B1 (de) | Dach-, decken- oder fassadenöffnung | |
| EP3587696B1 (de) | Öffenbare raumabschlusseinrichtung sowie verfahren zu deren öffnung | |
| DE102011085177A1 (de) | Antriebssystem für ein KFZ-Dachsystem | |
| DE3604083A1 (de) | Feststellvorrichtung fuer tuerfluegel mit einem tuerschliesser | |
| DE102018121305A1 (de) | Flugzeugtür, Flugzeugbereich und Flugzeug mit einer Flugzeugtür | |
| AT521543B1 (de) | Schutzvorrichtung für Roll- und Sektionaltore | |
| DE102004061161B4 (de) | Isolieraufbau für ein Fahrzeug | |
| DE102018132222A1 (de) | Öffenbare Raumabschlusseinrichtung sowie Verfahren zu deren Öffnung | |
| DE102019112336B4 (de) | Türeinheit für ein Fahrzeug | |
| DE8302361U1 (de) | Vorrichtung zum Be- und Entlüften von Räumen und zum Abzug von Rauch und Wärme aus Räumen | |
| DE3302887A1 (de) | Vorrichtung zum be- und entlueften von raeumen und zum abzug von rauch und waerme aus raeumen | |
| EP0744516B1 (de) | Veriegelungssystem für eine Tür | |
| EP3822437A1 (de) | Tür oder fenstersystem | |
| DE2646844A1 (de) | Verriegelung fuer schleusentueren | |
| DE102018115783A1 (de) | Öffenbare Raumabschlusseinrichtung sowie Verfahren zu deren Öffnung | |
| EP4441320B1 (de) | Fenster oder tür | |
| EP4237649B1 (de) | Schliessung mit ventilvorrichtung | |
| DE19713298C1 (de) | Vorrichtung zum Öffnen und Schließen einer Klappe | |
| DE19607234A1 (de) | Beschlag für einen um eine horizontale Achse schwenkbaren Flügel | |
| DE102018118088A1 (de) | Schutzvorrichtung für Roll- und Sektionaltore | |
| DE29507084U1 (de) | Hydraulisch betätigbare Rückwand |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200624 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: VKR HOLDING A/S |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20230621 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E05D 15/58 20060101ALI20240719BHEP Ipc: E05F 15/63 20150101ALI20240719BHEP Ipc: E05F 15/72 20150101ALI20240719BHEP Ipc: F24F 11/34 20180101ALI20240719BHEP Ipc: F24F 7/02 20060101ALI20240719BHEP Ipc: E04D 13/035 20060101AFI20240719BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240830 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019012630 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250312 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250507 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019012630 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251022 |
|
| 26N | No opposition filed |
Effective date: 20250912 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: H13 Free format text: ST27 STATUS EVENT CODE: U-0-0-H10-H13 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250627 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20250627 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250627 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250627 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |