EP3293584B1 - Mecanisme oscillateur d'horlogerie - Google Patents
Mecanisme oscillateur d'horlogerie Download PDFInfo
- Publication number
- EP3293584B1 EP3293584B1 EP17192071.3A EP17192071A EP3293584B1 EP 3293584 B1 EP3293584 B1 EP 3293584B1 EP 17192071 A EP17192071 A EP 17192071A EP 3293584 B1 EP3293584 B1 EP 3293584B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- resonators
- oscillator
- elementary
- timepiece oscillator
- timepiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 10
- 230000009975 flexible effect Effects 0.000 claims description 45
- 230000033001 locomotion Effects 0.000 claims description 26
- 230000005540 biological transmission Effects 0.000 claims description 23
- 230000008878 coupling Effects 0.000 claims description 14
- 238000010168 coupling process Methods 0.000 claims description 14
- 238000005859 coupling reaction Methods 0.000 claims description 14
- 238000006243 chemical reaction Methods 0.000 claims description 10
- 230000035939 shock Effects 0.000 claims description 9
- 230000003993 interaction Effects 0.000 claims description 5
- 230000010363 phase shift Effects 0.000 claims description 5
- 238000005452 bending Methods 0.000 claims description 4
- 230000010355 oscillation Effects 0.000 claims description 4
- 241000283707 Capra Species 0.000 claims 1
- 238000013519 translation Methods 0.000 description 9
- 230000014616 translation Effects 0.000 description 9
- 230000005484 gravity Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 238000013016 damping Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 210000003739 neck Anatomy 0.000 description 3
- 241000877344 Strophanthus divaricatus Species 0.000 description 2
- 240000008042 Zea mays Species 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000013213 extrapolation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 235000005824 Zea mays ssp. parviglumis Nutrition 0.000 description 1
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 239000006096 absorbing agent Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 235000005822 corn Nutrition 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 238000009760 electrical discharge machining Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 229940082150 encore Drugs 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B15/00—Escapements
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/08—Oscillators with coil springs stretched and unstretched axially
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B29/00—Frameworks
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B15/00—Escapements
- G04B15/14—Component parts or constructional details, e.g. construction of the lever or the escape wheel
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/045—Oscillators acting by spring tension with oscillating blade springs
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/06—Oscillators with hairsprings, e.g. balance
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/20—Compensation of mechanisms for stabilising frequency
- G04B17/28—Compensation of mechanisms for stabilising frequency for the effect of imbalance of the weights, e.g. tourbillon
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B43/00—Protecting clockworks by shields or other means against external influences, e.g. magnetic fields
- G04B43/002—Component shock protection arrangements
Definitions
- the invention relates to a horological oscillator comprising a structure or/and a frame, and a plurality of distinct primary resonators, temporally and geometrically phase-shifted, and each comprising at least one inertial mass returned to said structure or to said frame by a return means elastic, and each consisting of one or more elementary resonators, said horological oscillator comprising coupling means arranged to allow the interaction of said resonators, said coupling means comprising a mobile arranged to be subjected to a torque or a motor force and which comprises drive and guide means arranged to drive and guide a single control means articulated around a first control axis with a plurality of transmission means each articulated around a second axis of articulation, at a distance from said control means, with a said inertial mass of a said primary resonator, said resonators and said mobi the being arranged such that said second axes of articulation of any two of said resonators and said
- the invention also relates to a timepiece movement comprising at least one such timepiece oscillator.
- the invention relates to a watch comprising at least one such movement.
- the invention relates to the field of horological oscillators for watches, in particular for mechanical movements.
- the escapement In addition to these two functions, the escapement must be robust and resistant to shocks, and made in such a way as to avoid jamming the movement (overturning).
- the Swiss lever escapement has a low energy efficiency, around 30%. This low efficiency comes from the fact that the movements of the escapement are jerky, and the fact that several parts transmit their movement via inclined planes which rub against each other.
- the documents WO2015104692 and WO2015104693 on behalf of EPFL each describe a mechanical isotropic harmonic oscillator that includes at least one two-degree-of-freedom linkage supporting a mass in orbit relative to a fixed base having springs exhibiting linear and isotropic restoring force properties, the mass having a tilting movement.
- the oscillator can be used in a device for measuring time, for example a watch.
- the document CH451021A in the name of EBAUCHES SA describes a symmetrical bending oscillator for a timepiece, in particular for an electric timepiece, comprising a U-shaped part, the two branches of which, flexible, constitute two vibrating blades, as in a tuning fork. It has two rigid arms, serving as counterweights, each connected to one of the flexible branches, near the end of the latter, the arrangement being such that, for each of the two symmetrical parts of this oscillator, the center instantaneous rotation coincides with the center of gravity, all in such a way that the frequency of the oscillator practically does not vary with its changes of position in the field of gravity.
- the object of the present invention is to provide a high-efficiency exhaust system.
- the invention consists in the development of an architecture allowing continuous interactions, without jerks, between resonator and escape wheel. To do this, the use of at least one second resonator out of phase with respect to a first resonator must be granted.
- the invention relates to a clock oscillator according to claim 1.
- the invention also relates to a timepiece movement comprising at least one such timepiece oscillator.
- the invention relates to a watch comprising at least one such movement.
- the invention relates to a mechanical watch 200 provided with resonators that are balanced, phase-shifted and continuously maintained.
- the invention relates to a horological oscillator 1 comprising a structure 2 and/or a frame 4, and a plurality of separate primary resonators 10.
- These primary resonators 10 are out of phase temporally and geometrically. They each comprise at least one inertial mass 5, which is returned to the structure 2, or the frame 4, by an elastic return means 6.
- the term “separate resonators” means the fact that each primary resonator 10 has its own inertial mass 5 and its own elastic return means 6, in particular a spring.
- this horological oscillator 1 comprises coupling means 11, which are arranged to allow the interaction of the primary resonators 10, and which comprise a mobile 13, which is arranged to be subjected to a force or/and to a engine couple.
- These coupling means 11 comprise motor means 12, arranged to drive such a mobile 13. More particularly, motor means 12 are arranged to drive this mobile 13 in motion.
- This mobile 13 comprises drive and guide means 14, which are arranged to drive and guide, preferably captively, a mechanical control means.
- This control means 15 is articulated around a first control axis with a plurality of transmission means 16, each articulated around a second axis of articulation, at a distance from the control means 15, with an inertial mass 5 d a primary resonator 10.
- the primary resonators 10 oscillate around mutually parallel axes.
- the invention seeks to perform a compensation of the forces at the recesses, both in translation and in rotation, unlike the known prior art, which only performs a compensation in translation.
- the rotation compensation is an important characteristic of the invention, it allows the oscillator to vibrate longer, and to have a better quality factor. In addition, the sensitivity to shocks is less.
- the primary resonators 10 and the mobile 13 are arranged in such a way that the second axes of articulation of any two of the primary resonators 10, and the first control axis of the control means 15, are never coplanar. In other words, the projections of these axes along a common perpendicular plane are never aligned. It is understood that the axes of articulation can, in certain embodiments, be axes of virtual pivots.
- the mobile 13 is subjected to a rotational movement; more particularly, the motor means 12 are arranged to drive the mobile 13 according to a rotational movement around an axis of rotation A.
- the drive and guide means 14 consist of a groove 140 in which slides a finger 150 that comprises the control means 15. Said groove 140 can be substantially radial with respect to the axis of rotation A of the mobile 13.
- the mobile 13 replaces a conventional escapement wheel, and is preferably downstream of a going train powered by a barrel or the like.
- the transmission means 16 can in particular be made in the form of connecting rods 160, each comprising a first articulation 161 with the control means 15, and a second articulation 162 with the inertial mass 5 considered.
- the first articulation 161 and the second articulation 162 together define a connecting rod direction.
- all the connecting rod directions form two by two, at any instant, an angle different from zero or ⁇ . Otherwise formulated, the vector product of the two directions of connecting rods is different from zero.
- the transmission means 16 are non-collinear connecting rods 160.
- the mobile 13, subjected to an engine torque, and the coupling means 11 have an interaction geometry, which essentially makes it possible to transmit tangential forces to these connecting rods 160.
- elementary resonators are called resonators which together constitute a primary resonator: they are mounted in tune, in such a way that the reactions and the errors cancel each other out.
- a number n of elementary resonators together constitute a primary resonator they are out of phase with each other by 2 ⁇ /n.
- the figure 1 illustrates a general case of two primary resonators, each consisting of a single elementary resonator, 10A and 10B, of the mass-spring type oscillating linearly and in different directions, and whose masses 5A and 5B are articulated to connecting rods 16A and 16B, which cooperate together in an articulated manner with a finger 150, which constitutes the control means 15, which runs through a groove 140 of a wheel constituting the mobile 13, the motor means being represented in figure 4 which shows a detail at the level of the articulation of the connecting rods on the control means 15.
- the primary resonators 10 are rotary resonators.
- at least one mobile of the primary resonator has a large oscillation amplitude, preferably greater than 180° and advantageously greater than 270°.
- These rotating primary resonators 10 are not very sensitive to shocks in translation, and to positioning problems, unlike linear and angular resonators.
- the figure 2 illustrates such an example, where the primary resonators 10A, 10B are balance-spring sets, where the hairsprings 6A, 6B are attached at their external turn to the structure 2, and at their internal turn to the balances 5A, 5B, which are articulated with the ends 162A, 162B, of connecting rods 16A, 16B, arranged similarly to those of the figure 1 .
- the oscillator 1 is arranged so that the forces and reaction torques of all the primary resonators 10 on the support 2 (or on the frame 4 if they are all fixed on such a frame) approximately cancel each other out.
- the forces approximately cancel each other out because the center of mass does not move, or moves very little, when the axis of rotation passes through the center of mass.
- the center of mass is substantially coincident with the center of rotation, that is to say with a position deviation of only a few micrometers or tens of micrometers.
- the torques approximately cancel each other out because each rotating component is balanced by another counter-rotating component.
- the coupling between the resonators can be done via a flexible embedding as in a tuning fork or via the connecting rods 160, or, more generally, the transmission means 16.
- the coupling of the primary resonators 10 relative to each other is then done by a flexible installation of each of the primary resonators 10 with respect to the common structure 2 or to the frame 4.
- the resultant of the forces and reaction torques of the primary resonators 10 with respect to the common structure 2 or to the frame 4, to which or to which they are fixed, is zero, thanks to the phase-shifted arrangement of the n primary resonators 10, in particular rotary.
- the rotating primary resonators 10 are arranged so that their centers of mass remain approximately in a fixed position, at least during normal oscillations of these primary resonators 10.
- the timepiece oscillator 1 preferably comprises means of stopper to limit their travel in the event of an impact or the like.
- these primary resonators 10 have at least one substantially identical resonance mode, they are arranged to vibrate according to a phase difference between them of the value 2 ⁇ /n, where n is their number, and they are arranged according to a symmetry in the space such that the resultant of the forces and torques applied by the primary resonators 10 on the structure 2, or on a frame 4 which supports them, is zero.
- substantially identical resonance mode it is meant that these primary resonators 10 have substantially the same amplitude, substantially the same inertia, and substantially the same natural frequency. The most important is this time phase shift of 2 ⁇ /n.
- the primary resonators 10 are an even number, and they constitute two by two of the pairs in which the inertial masses 5 are in motion out of phase by ⁇ with respect to each other. .
- At least one of the primary resonators 10 consists of a plurality of n elementary resonators 810.
- These elementary resonators 810 each comprise at least one elementary mass carried by an elementary elastic flexible blade, constituting an elastic return means, and which is arranged to work in bending, and which is embedded in an elementary crosspiece.
- These elementary resonators 810 have at least one substantially identical resonance mode, and are arranged to vibrate according to a phase shift between them of the value 2 ⁇ /n, where n is the number of elementary resonators 810. They are arranged according to a symmetry in the space, such as the resultant of efforts and torques applied by the elementary resonators 810 on the elementary crosspiece is zero.
- This elementary crosspiece is fixed to the fixed support 2 by an elementary main elastic connection, the rigidity of which is greater than the rigidity of each elementary elastic flexible blade, and the damping of which is greater than the damping of each elementary flexible blade.
- the elementary resonators 810 are arranged in space so that the resultant of their path errors due to gravitation is zero.
- At least one of the primary resonators 10 consists of a pair of such elementary resonators 810.
- the elementary inertial masses are in motion out of phase by ⁇ relative to each other.
- this pair consists of identical elementary resonators 810, which are in geometric and phase opposition with respect to each other.
- each primary resonator 10 consists of such a pair of elementary resonators 810.
- each primary resonator 10A, 10B thus forms, by the combination of two elementary resonators 8101, 8102, respectively 8103, 8104, an isochronous oscillator mechanism of the tuning fork type known as goat horns.
- a crosspiece 40A, 40B respectively is fixed to the fixed support 2 by a main elastic connection 3A, 3B respectively, the rigidity of which is greater than the rigidity of each elastic flexible strip 61A, 62A, 61B, 62B respectively. And the damping of this main elastic connection is greater than that of each flexible blade.
- each primary resonator 10 is balanced for itself, in translation and in rotation.
- the fixed support 2 forms a monolithic assembly with these two primary monolithic structures.
- flat structure it is meant that this monolithic structure is a right prism, produced by elevation of a two-dimensional contour, along a direction of elongation, and delimited by two end planes parallel to each other and perpendicular to this direction of elongation of the prism.
- the monolithic structure has a constant thickness defined by the spacing of these two end planes, and therefore has a single level, in certain variants certain zones, in particular flexible blades of the monolithic structure, may occupy only part of this thickness.
- the monolithic structure is produced by a growth process, of the “MEMS”, “LIGA” or similar type.
- the monolithic structure is produced by cutting out a plate, for example by wire spark erosion and/or sinking.
- the crosspiece 40A carries a pair of masses 5, marked 51A and 52 A, respectively 51B and 52 B, mounted symmetrically on either side of the fixed support 2 and of the main elastic connection 3A, respectively 3B .
- Each of these masses is mounted in an oscillating manner and returned by an elastic flexible blade 61A, 62A, respectively 61B, 62B, which is a hairspring, or else an assembly of hairsprings.
- These spirals are each linked directly or indirectly to a mass at the level of their internal spiral, and attached to the crosspiece 40A, respectively 40B, by its external spiral.
- Each mass pivots around a virtual pivot axis of determined position with respect to the crosspiece 40A, respectively 40B.
- Each virtual pivot axis is, in the rest position of the isochronous oscillator mechanism 1, coincident with the center of mass, of the respective mass.
- the masses extend substantially parallel to each other in the rest position, in a transverse direction.
- each hairspring has a variable section or curvature along its development.
- the variant of the figure 5 is a structure similar to that of the picture 3 , where each primary resonator 10A, 10B, forms, by the combination of two elementary resonators 8101, 8102, respectively 8103, 8104, an isochronous oscillator mechanism of the so-called H tuning fork type.
- the elastic flexible blades 6: 61A, 62A, respectively 61B , 62B, are no longer made up of hairsprings, but of straight, short blades.
- the term “short blade” is used here to mean a blade with a length less than the smallest value between four times its height or thirty times its thickness, this characteristic of a short blade making it possible to limit the displacements of the center of mass concerned.
- These short blades are here arranged on either side of a crosspiece 40A, respectively 40B, with which they form the horizontal bar of an H whose masses form the vertical bars. Due to the symmetry, and the alignment, the longitudinal arrangement of the elastic flexible strips makes it possible to compensate for the direction of greatest displacement of the centers of mass, which move symmetrically with respect to the plane of symmetry.
- Each primary resonator 10A, 10B thus rendered isochronous by one of these particular combinations of elementary resonators, advantageously comprises rotation stops, and/or translation limiting stops in the longitudinal and transverse directions, and/or stops limitation in translation in a direction perpendicular to the two previous ones.
- These stroke limiting means can be integrated, be part of a one-piece construction, or/and be attached.
- the masses advantageously comprise abutment means arranged to cooperate with complementary abutment means that comprise the crosspieces 40A, 40B, to limit the movement of the elastic flexible strips with respect to these crosspieces, in the event of shocks or similar accelerations .
- the figure 5 also illustrates an advantageous variant where the transmission means 16A, 16B are elastic flexible blades. It is then possible to produce a monolithic assembly comprising the structure 2, the primary resonators 10 as described above, in particular complete, and these elastic flexible blades, and the finger 150.
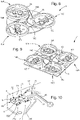
- the figures 6 and 7 illustrate variants where the connecting rods are beams having necks at both ends instead of hubs.
- the figure 6 illustrates a case of coupling of two primary resonators, the figure 7 of three such resonators.
- the transmission means 16 thus comprise at least one monolithic connecting rod arranged to cooperate both with the control means 15 and with at least two inertial masses 5 of as many primary resonators 10, and comprise at least one flexible neck at the level of each joint zone.
- the figures 1, 2 , 3, and 5 illustrate a horological oscillator 1 comprising two primary resonators 10.
- the horological oscillator 1 comprises at least three primary resonators 10.
- the figure 8 illustrates a horological oscillator 1 comprising three primary resonators 10. This figure shows the application of the coupling of the figure 7 to the inertial masses 5A, 5B, 5C, of the three primary resonators 10A, 10B, 10C.
- the figure 9 illustrates a clock oscillator 1 comprising four resonators. These four resonators can be four primary resonators 10. They can also be four elementary resonators, constituting two by two primary resonators: one composed of elementary resonators 10A and 10C, out of phase by ⁇ , the other of elementary resonators 10B and 10D , also out of phase by ⁇ .
- each resonator taken in isolation has a reaction to the embedding, and it is the juxtaposition and the judicious combination of the "n" resonators compensates for all of the reactions.
- the figure 10 , 12, and 13 illustrate a variant where at least one elastic return means 6 also constitutes a rotary guide, which makes it possible to avoid the friction inherent in the use of pivots.
- the figure 10 shows a transmission means 16 consisting of a flexible blade, in the configuration of the figure 9 .
- This figure also shows angular stops: 71, 72, 710, 720, 76 on the mass 5, the respective complementary abutment surfaces 73, 74, 730, 740, 77 at the level of the frame 4 on which is attached a short flexible blade 6, and a shockproof abutment surface 75 on the mass 5, arranged to cooperate with a complementary surface 750 at the level of the frame 4.
- These integrated shock absorbers are particularly advantageous, and do not require any adjustment.
- the mobile 13 is subjected to a rotational movement; more particularly, the motor means 12 are arranged to drive the mobile 13 according to a rotational movement, and the mobile 13 and the driving and guiding means 14 are arranged to apply to the control means 15 an essentially tangential force with respect to the rotation of the mobile 13.
- the figure 11 illustrates a variant according to the invention where the mobile 13 comprises a deformable elastic structure 130, forming a radially flexible and tangentially rigid guide, this deformable structure 130 comprises a housing 140 to cooperate with the finger 150 of the control means 15, at the main joint.
- the elastic return means 6 of the primary resonators 10 comprise flexible blades
- the primary resonators 10 and/or the common structure 2, or/and the frame 4 comprise radial stops and/ or angular and/or axial arranged to limit the deformations of the flexible blades and to avoid breakage in the event of shocks or too high engine torque.
- the horological oscillator 1 comprises a monolithic structure which groups together a common structure 4 towards which the inertial masses 5 are returned by their elastic return means 6, the control means 15 and its articulations with the transmission means 16, and the means transmission 16 with their joints to the inertial masses 5.
- the desired phase shifts are perfectly ensured, the cancellation of the reactions also.
- Such monolithic structures allow the elimination of traditional pivots, by implementing flexible strips which have a dual function: pivoting guidance constituting a virtual pivot, and elastic return.
- this monolithic structure still includes the stops.
- the orientation of the elastic return means 6 of the primary resonators 10 is optimized so that the rate errors due to gravity are canceled between the primary resonators 10.
- the elastic return means 6 of the primary resonators 10 are virtual pivots with crossed blades.
- the primary resonators 10 are isochronous.
- At least the elastic means that comprises the clock oscillator 1 according to the invention are thermally compensated.
- An embodiment in micro-machinable material makes it possible to ensure such compensation.
- the invention also relates to a timepiece movement 100 comprising at least one such timepiece oscillator 1.
- the invention also relates to a watch 200 comprising at least one such movement 100.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Micromachines (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
- Electric Clocks (AREA)
Description
- L'invention concerne un oscillateur horloger comportant une structure ou/et un cadre, et une pluralité de résonateurs primaires distincts, déphasés temporellement et géométriquement, et comportant chacun au moins une masse inertielle rappelée vers ladite structure ou vers ledit cadre par un moyen de rappel élastique, et chacun constitué d'un ou plusieurs résonateurs élémentaires, ledit oscillateur horloger comportant des moyens de couplage agencés pour permettre l'interaction desdits résonateurs, lesdits moyens de couplage comportant un mobile agencé pour être soumis à un couple ou un effort moteur et qui comporte des moyens d'entraînement et de guidage agencés pour entraîner et guider un moyen de commande unique articulé autour d'un premier axe de commande avec une pluralité de moyens de transmission chacun articulé autour d'un deuxième axe d'articulation, à distance dudit moyen de commande, avec une dite masse inertielle d'un dit résonateur primaire, lesdits résonateurs et ledit mobile étant agencés de telle façon que lesdits deuxièmes axes d'articulation de deux quelconques desdits résonateurs et ledit premier axe de commande dudit moyen de commande ne sont jamais coplanaires.
- L'invention concerne encore un mouvement d'horlogerie comportant au moins un tel oscillateur horloger.
- L'invention concerne une montre comportant au moins un tel mouvement.
- L'invention concerne le domaine des oscillateurs d'horlogerie pour montres, notamment pour des mouvements mécaniques.
- La plupart des montres mécaniques actuelles comportent un échappement à ancre suisse. Les deux fonctions principales de l'échappement sont:
- l'entretien des va-et-vient du résonateur, constitué par un ensemble balancier-spiral ;
- le comptage de ces va-et-vient.
- En plus de ces deux fonctions, l'échappement doit être robuste, et résister aux chocs, et constitué de façon à éviter de coincer le mouvement (renversement).
- L'échappement à ancre suisse a un rendement énergétique faible, de l'ordre de 30%. Ce faible rendement provient du fait que les mouvements de l'échappement sont saccadés, et du fait que plusieurs pièces se transmettent leur mouvement via des plans inclinés qui frottent les uns par rapport aux autres.
- Le brevet
FR 630831 - Les documents
WO2015104692 etWO2015104693 au nom de EPFL décrivent chacun un oscillateur harmonique isotrope mécanique qui comprend au moins une liaison à deux degrés de liberté supportant une masse en orbite par rapport à une base fixe ayant des ressorts présentant des propriétés de force de restauration linéaire et isotrope, la masse ayant un mouvement d'inclinaison. L'oscillateur peut être utilisé dans un dispositif de mesure du temps, par exemple une montre. - Le document
CH451021A - La présente invention a pour objectif de proposer un système d'échappement à haut rendement. On propose également un oscillateur sans pivot et sans réaction au support permettant d'atteindre de très hauts facteurs de qualité.
- Pour atteindre ce but, l'invention consiste dans la mise au point d'une architecture permettant des interactions continues, sans saccades, entre résonateur et roue d'échappement. On doit, pour ce faire, concéder l'utilisation d'au moins un deuxième résonateur déphasé par rapport à un premier résonateur.
- A cet effet, l'invention concerne un oscillateur horloger selon la revendication 1.
- L'invention concerne encore un mouvement d'horlogerie comportant au moins un tel oscillateur horloger.
- L'invention concerne une montre comportant au moins un tel mouvement.
- D'autres caractéristiques et avantages de l'invention apparaîtront à la lecture de la description détaillée qui va suivre, en référence aux dessins annexés, où :
- la
figure 1 représente, de façon schématisée et en plan, un oscillateur horloger selon une variante qui n'appartient pas à l'objet des revendications annexées, dans une exécution comportant deux résonateurs primaires chacun constitué d'un résonateur élémentaire unique de type masse-ressort oscillant linéairement et selon des directions différentes, et dont les masses sont articulées à des bielles, lesquelles coopèrent ensemble de façon articulée avec un doigt qui parcourt une rainure d'un mobile soumis à un couple moteur, pour coupler les deux résonateurs primaires ; - la
figure 2 représente, de façon schématisée et en vue en plan, une variante qui n'appartient pas à l'objet des revendications annexées, où les résonateurs primaires sont chacun constitué d'un résonateur élémentaire rotatif, de type balancier-spiral ; - la
figure 3 représente, de façon schématisée et en vue en plan, une autre variante qui n'appartient pas à l'objet des revendications annexées, avec deux résonateurs primaires, dont chacun est lui-même constitué d'une paire de résonateurs élémentaires, qui comportent chacun une masse élémentaire portée par une lame flexible élastique élémentaire sous forme de spiral, constituant un moyen de rappel élastique, et qui est agencée pour travailler en flexion, et qui est encastrée dans une traverse ; chaque résonateur primaire forme ainsi, par la combinaison de ces deux résonateurs élémentaires, un mécanisme oscillateur isochrone de type diapason dit en cornes de bouc ; - la
figure 4 représente, de façon schématisée et en perspective, un détail de l'articulation des bielles desfigures 1 à 3 ; - la
figure 5 représente, de façon similaire, une structure similaire à celle de lafigure 3 , où les lames flexibles élastiques ne sont plus constituées par des spiraux, mais par des lames droites et courtes, disposées de part et d'autre d'une traverse avec laquelle elle forment la barre horizontale d'un H dont les masses forment les barres verticales; chaque résonateur primaire forme ainsi, par la combinaison de ses deux résonateurs élémentaires, un mécanisme oscillateur isochrone de type diapason dit en H ; cettefigure 5 montre des moyens de transmission constitués par des lames flexibles, en remplacement des bielles des figures précédentes ; - les
figures 6 et 7 représentent, de façon schématisée et en perspective, des variantes où les bielles sont des poutres comportant des cols aux deux extrémités en lieu et place des moyeux, lafigure 6 illustre un cas de couplage de deux résonateurs primaires, lafigure 7 illustre un cas de couplage de trois tels résonateurs ; - la
figure 8 représente, de façon schématisée et en perspective, un oscillateur horloger comportant trois résonateurs primaires, chacun constitué d'un résonateur élémentaire unique, disposés en triangle autour de leur moyen de commande commun ; cette figure montre l'application du couplage de lafigure 7 aux masses inertielles des trois résonateurs ; - la
figure 9 représente, de façon similaire à lafigure 8 , un oscillateur horloger comportant quatre résonateurs; - la
figure 10 représente, de façon schématisée et en perspective, une variante où un moyen de rappel élastique constitue également un guidage rotatif, un moyen de transmission est constitué par une lame flexible, dans la configuration de lafigure 9 ; cette figure montre également des butées angulaires et des butées antichoc, ménagées sur un ensemble monolithique regroupant un cadre, des lames flexibles courtes, les masses inertielles, les moyens de transmission et l'interface avec des moyens de commande ; - la
figure 11 représente, de façon schématisée et en vue en plan, une variante selon l'invention où le mobile comporte une structure élastique déformable, formant un guidage souple radialement et rigide tangentiellement, comportant un logement de réception d'un doigt du moyen de commande, à l'articulation principale, la structure déformable étant représentée en deux positions extrêmes ; - la
figure 12 représente, de façon schématisée et en perspective, l'extrapolation de l'ensemble monolithique de lafigure 10 pour un mécanisme comportant quatre masses inertielles ; cet ensemble est élargi, et comporte encore la structure porteuse, et une liaison élastique principale de suspension du cadre à cette structure ; - la
figure 13 représente l'ensemble de lafigure 10 dans un champ de gravitation ; - la
figure 14 est un schéma-blocs représentant une montre comportant un mouvement qui intègre un oscillateur horloger selon l'invention. - L'invention concerne une montre mécanique 200 munie de résonateurs équilibrés, déphasés et entretenus de manière continue.
- L'invention concerne un oscillateur horloger 1 comportant une structure 2 ou/et un cadre 4, et une pluralité de résonateurs primaires 10 distincts.
- Ces résonateurs primaires 10 sont déphasés temporellement et géométriquement. Ils comportent chacun au moins une masse inertielle 5, qui est rappelée vers la structure 2, ou le cadre 4, par un moyen de rappel élastique 6. On entend en effet par « résonateurs distincts » le fait que chaque résonateur primaire 10 possède sa propre masse inertielle 5 et son propre moyen de rappel élastique 6, notamment un ressort.
- Selon l'invention, cet oscillateur horloger 1 comporte des moyens de couplage 11, qui sont agencés pour permettre l'interaction des résonateurs primaires 10, et qui comportent un mobile 13, qui est agencé pour être soumis à un effort ou/et à un couple moteur. Ces moyens de couplage 11 comportent des moyens moteurs 12, agencés pour entraîner un tel mobile 13. Plus particulièrement, des moyens moteurs 12 sont agencés pour entraîner en mouvement ce mobile 13. Ce mobile 13 comporte des moyens d'entraînement et de guidage 14, qui sont agencés pour entraîner et guider, de préférence de façon prisonnière, un moyen de commande 15 mécanique. Ce moyen de commande 15 est articulé autour d'un premier axe de commande avec une pluralité de moyens de transmission 16, chacun articulé autour d'un deuxième axe d'articulation, à distance du moyen de commande 15, avec une masse inertielle 5 d'un résonateur primaire 10.
- De préférence, les résonateurs primaires 10 oscillent autour d'axes parallèles entre eux.
- L'invention s'attache à effectuer une compensation des efforts aux encastrements, aussi bien en translation qu'en rotation, contrairement à l'art antérieur connu, qui n'effectue qu'une compensation en translation.
- La compensation en rotation est une caractéristique importante de l'invention, elle permet à l'oscillateur de vibrer plus longtemps, et d'avoir un meilleur facteur qualité. De plus, la sensibilité aux chocs est moindre.
- Bien sûr, le fait d'annuler les réactions aux encastrements n'est pas indispensable pour le fonctionnement de l'oscillateur, mais il représente une caractéristique très avantageuse car cette disposition améliore très sensiblement la sensibilité aux petits chocs.
- Selon l'invention, les résonateurs primaires 10 et le mobile 13 sont agencés de telle façon que les deuxièmes axes d'articulation de deux quelconques des résonateurs primaires 10, et le premier axe de commande du moyen de commande 15, ne sont jamais coplanaires. En d'autres termes, les projections de ces axes selon un plan perpendiculaire commun ne sont jamais alignées. On comprend que les axes d'articulation peuvent, dans certaines réalisations, être des axes de pivots virtuels.
- Dans les variantes non limitatives de réalisation illustrées aux
figures 1 à 9 , le mobile 13 est soumis à un mouvement de rotation; plus particulièrement, les moyens moteurs 12 sont agencés pour entraîner le mobile 13 selon un mouvement de rotation autour d'un axe de rotation A. - Dans des variantes qui n'appartiennent pas à l'objet des revendications annexées, les moyens d'entraînement et de guidage 14 sont constitués par une rainure 140 dans laquelle coulisse un doigt 150 que comporte le moyen de commande 15. Ladite rainure 140 peut être sensiblement radiale par rapport à l'axe de rotation A du mobile 13.
- On comprend que le mobile 13 se substitue à une roue d'échappement classique, et est préférentiellement en aval d'un rouage de finissage alimenté par un barillet ou similaire.
- Les moyens de transmission 16 peuvent en particulier être réalisés sous la forme de bielles 160, comportant chacune une première articulation 161 avec le moyen de commande 15, et une deuxième articulation 162 avec la masse inertielle 5 considérée. La première articulation 161 et la deuxième articulation 162 définissent ensemble une direction de bielle. Selon l'invention, toutes les directions de bielle font deux à deux, à tout instant, un angle différent de zéro ou π. Autrement formulé, le produit vectoriel des deux directions de bielles est différent de zéro.
- Dans une application particulière, les moyens de transmission 16 sont des bielles 160 non colinéaires. Le mobile 13, soumis à un couple moteur, et les moyens de couplage 11 ont une géométrie d'interaction, qui permet de transmettre essentiellement des forces tangentielles à ces bielles 160.
- On appelle ci-après résonateurs élémentaires des résonateurs constituant ensemble un résonateur primaire: ils sont montés en diapason, de telle façon que les réactions et les erreurs s'annulent. Quand un nombre n de résonateurs élémentaires constituent ensemble un résonateur primaire, ils sont déphasés entre eux de 2π/n.
- La
figure 1 illustre un cas général de deux résonateurs primaires, chacun constitué d'un résonateur élémentaire unique, 10A et 10B, de type masse-ressort oscillant linéairement et selon des directions différentes, et dont les masses 5A et 5B sont articulées à des bielles 16A et 16B, lesquelles coopèrent ensemble de façon articulée avec un doigt 150, qui constitue le moyen de commande 15, qui parcourt une rainure 140 d'une roue constituant le mobile 13, les moyens moteurs étant représentés enfigure 4 qui montre un détail au niveau de l'articulation des bielles sur le moyen de commande 15. - Dans une application particulière préférée, mais non limitative, et illustrée par les figures, les résonateurs primaires 10 sont des résonateurs rotatifs. On entend par là qu'au moins un mobile du résonateur primaire a une amplitude d'oscillation importante, de préférence supérieure à 180° et avantageusement supérieure à 270°. On distingue un tel résonateur rotatif d'un résonateur angulaire avec des lames encastrées en porte-à-faux connu de l'art antérieur
FR 630831 - Ces résonateurs primaires 10 rotatifs sont peu sensibles aux chocs en translation, et aux problèmes de positionnement, contrairement aux résonateurs linéaires et angulaires.
- La
figure 2 illustre un tel exemple, où les résonateurs primaires 10A, 10B, sont des ensembles balancier-spiral, où les spiraux 6A, 6B sont attachés au niveau de leur spire externe à la structure 2, et au niveau de leur spire interne aux balanciers 5A, 5B, lesquels sont articulés avec des extrémités 162A, 162B, de bielles 16A, 16B, agencées de façon similaire à celles de lafigure 1 . - Pour obtenir un meilleur facteur de qualité, l'oscillateur 1 est agencé de façon à ce que les forces et les couples de réactions de l'ensemble des résonateurs primaires 10 sur le support 2 (ou sur le cadre 4 s'ils sont tous fixés sur un tel cadre) s'annulent de façon approximative. Les forces s'annulent de façon approximative parce que le centre de masse ne bouge pas, ou très peu, quand l'axe de rotation passe par le centre de masse. Le centre de masse est sensiblement confondu avec le centre de rotation, c'est-à-dire avec un écart de position de seulement quelques micromètres ou dizaines de micromètres. Les couples s'annulent de façon approximative car chaque composant en rotation est compensé par un autre composant en rotation inverse. Le couplage entre les résonateurs peut se faire via un encastrement flexible comme dans un diapason ou via les bielles 160, ou, plus généralement, les moyens de transmission 16. Le couplage des résonateurs primaires 10 les uns par rapport aux autres se fait alors par un encastrement flexible de chacun des résonateurs primaires 10 par rapport à la structure commune 2 ou au cadre 4.
- Ainsi, de préférence, la résultante des efforts et couples de réaction des résonateurs primaires 10 par rapport à la structure commune 2 ou au cadre 4, à laquelle ou auquel ils sont fixés, est nulle, grâce à l'agencement déphasé des n résonateurs primaires 10, en particulier rotatifs.
- Pour un fonctionnement optimal, les résonateurs primaires rotatifs 10 sont agencés de façon à ce que leurs centres de masse restent approximativement en position fixe, au moins lors des oscillations normales de ces résonateurs primaires 10. L'oscillateur horloger 1 comporte de préférence des moyens de butée pour limiter leur course en cas de choc ou similaire.
- De préférence, ces résonateurs primaires 10 ont au moins un mode de résonance sensiblement identique, ils sont agencés pour vibrer selon un déphasage entre eux de la valeur 2π/n, où n est leur nombre, et ils sont agencés selon une symétrie dans l'espace telle que la résultante des efforts et des couples appliqués par les résonateurs primaires 10 sur la structure 2, ou sur un cadre 4 qui les supporte, est nulle.
- Par « mode de résonance sensiblement identique », on entend que ces résonateurs primaires 10 ont sensiblement la même amplitude, sensiblement la même inertie, et sensiblement la même fréquence propre. Le plus important est ce déphasage temporel de 2π/n. Dans une application particulière, tel que visible sur les figures, les résonateurs primaires 10 sont en nombre pair, et ils constituent deux à deux des paires dans lesquelles les masses inertielles 5 sont en mouvement déphasé de π l'un par rapport à l'autre.
- Dans un agencement particulier, tel que visible sur les
figures 3 et 5 , au moins un des résonateurs primaires 10 est constitué d'une pluralité de n résonateurs élémentaires 810. Ces résonateurs élémentaires 810 comportent chacun au moins une masse élémentaire portée par une lame flexible élastique élémentaire, constituant un moyen de rappel élastique, et qui est agencée pour travailler en flexion, et qui est encastrée dans une traverse élémentaire. - Ces résonateurs élémentaires 810 ont au moins un mode de résonance sensiblement identique, et sont agencés pour vibrer selon un déphasage entre eux de la valeur 2π/n, où n est le nombre des résonateurs élémentaires 810. Ils sont agencés selon une symétrie dans l'espace, telle que la résultante des efforts et des couples appliqués par les résonateurs élémentaires 810 sur la traverse élémentaire est nulle.
- Cette traverse élémentaire est fixée au support fixe 2 par une liaison élastique principale élémentaire, dont la rigidité est supérieure à la rigidité de chaque lame flexible élastique élémentaire, et dont l'amortissement est supérieur à l'amortissement de chaque lame flexible élémentaire. Et les résonateurs élémentaires 810 sont agencés dans l'espace de manière à ce que la résultante de leurs erreurs de marche dues à la gravitation soit nulle.
- Plus particulièrement, au moins un des résonateurs primaires 10 est constitué d'une paire de tels résonateurs élémentaires 810. Dans cette paire, les masses inertielles élémentaires sont en mouvement déphasé de π l'un par rapport à l'autre.
- Plus particulièrement encore, cette paire est constituée de résonateurs élémentaires 810 identiques, qui sont en opposition géométrique et de phase l'un par rapport à l'autre.
- Dans le cas particulier des
figures 3 et 5 , chaque résonateur primaire 10 est constitué d'une telle paire de résonateurs élémentaires 810. - Dans la variante de la
figure 3 , chaque résonateur primaire 10A, 10B, forme ainsi, par la combinaison de deux résonateurs élémentaires 8101, 8102, respectivement 8103, 8104, un mécanisme oscillateur isochrone de type diapason dit en cornes de bouc. Une traverse 40A, respectivement 40B, est fixée au support fixe 2 par une liaison élastique principale 3A, respectivement 3B, dont la rigidité est supérieure à la rigidité de chaque lame flexible élastique 61A, 62A, respectivement 61B, 62B. Et l'amortissement de cette liaison élastique principal est supérieur à celui de chaque lame flexible. Ces caractéristiques assurent un couplage entre les résonateurs élémentaires 8101 et 8102, respectivement 8103 et 8104. - Dans cette variante, chaque résonateur primaire 10 est équilibré pour lui-même, en translation et en rotation.
- Pour chaque résonateur primaire 10A, 10B, au moins la liaison élastique principale 3A, respectivement 3B, la traverse 40A, respectivement 40B, les lames flexibles élastiques 61A, 62A, respectivement 61B, 62B, forment ensemble une structure monolithique primaire plane, en matériau micro-usinable, tel que silicium, ou silicium oxydé, ou quartz, ou DLC, ou similaire, qui, dans la position de repos du mécanisme oscillateur isochrone 1, est symétrique par rapport à un plan de symétrie. Avantageusement, le support fixe 2 forme un ensemble monolithique avec ces deux structures monolithiques primaires. Par « structure plane », on entend que cette structure monolithique est un prisme droit, réalisé par élévation d'un contour à deux dimensions, le long d'une direction d'élongation, et délimité par deux plans de bout parallèles entre eux et perpendiculaires à cette direction d'élongation du prisme.
- Si, dans une réalisation particulière, la structure monolithique a une épaisseur constante définie par l'écartement de ces deux plans de bout, et a de ce fait un seul niveau, dans certaines variantes certaines zones, notamment des lames flexibles de la structure monolithique, peuvent n'occuper qu'une partie de cette épaisseur.
- Une telle réalisation monolithique, particulièrement avantageuse, est applicable aux différentes variantes non limitatives de l'invention illustrées dans la présente description. Dans une première variante, la structure monolithique est élaborée par un procédé de croissance, de type « MEMS », « LIGA », ou similaire.
- Dans une autre variante, la structure monolithique est élaborée par découpe d'une plaque, par exemple par électro-érosion au fil ou/et enfonçage.
- La traverse 40A, respectivement 40B, porte une paire de masses 5, repérées 51A et 52 A, respectivement 51B et 52 B, montées de façon symétrique de part et d'autre du support fixe 2 et de la liaison élastique principale 3A, respectivement 3B. Chacune de ces masses est montée de façon oscillante et rappelée par une lame flexible élastique 61A, 62A, respectivement 61B, 62B, qui est un spiral, ou encore un assemblage de spiraux. Ces spiraux sont, chacun, lié directement ou indirectement à une masse au niveau de leur spire interne, et attachés à la traverse 40A, respectivement 40B, par sa spire externe. Chaque masse pivote autour d'un axe de pivotement virtuel de position déterminée par rapport à la traverse 40A, respectivement 40B. Chaque axe de pivotement virtuel est, en position de repos du mécanisme oscillateur isochrone 1, confondu avec le centre de masse, de la masse respective. Les masses s'étendent sensiblement parallèlement l'une à l'autre en position au repos, selon une direction transversale. Pour limiter le déplacement des centres de masse à une course transversale par rapport à la traverse 4, aussi réduite que possible dans cette direction transversale Y, et à une course longitudinale selon une direction longitudinale (perpendiculaire à cette direction transversale) qui est supérieure à cette course transversale, chaque spiral est à section ou courbure variable le long de son développement.
- La variante de la
figure 5 , est une structure similaire à celle de lafigure 3 , où chaque résonateur primaire 10A, 10B, forme, par la combinaison de deux résonateurs élémentaires 8101, 8102, respectivement 8103, 8104, un mécanisme oscillateur isochrone de type diapason dit en H. Les lames flexibles élastiques 6 : 61A, 62A, respectivement 61B, 62B, ne sont plus constituées par des spiraux, mais par des lames droites et courtes. On appelle ici « lame courte » une lame d'une longueur inférieure à la plus petite valeur entre quatre fois sa hauteur ou trente fois son épaisseur, cette caractéristique de lame courte permettant de limiter les déplacements du centre de masse concerné. Ces lames courtes sont ici disposées de part et d'autre d'une traverse 40A, respectivement 40B, avec laquelle elle forment la barre horizontale d'un H dont les masses forment les barres verticales. Du fait de la symétrie, et de l'alignement, la disposition longitudinale des lames flexibles élastiques permet de compenser la direction de plus grand déplacement des centres de masse, qui se déplacent de façon symétrique par rapport au plan de symétrie. - Chaque résonateur primaire 10A, 10B, ainsi rendu isochrone par l'une de ces combinaisons particulières de résonateurs élémentaires, comporte avantageusement des butées en rotation, ou/et des butées de limitation de translation selon les directions longitudinale et transversale, ou/et des butées de limitation en translation selon une direction perpendiculaire aux deux précédentes. Ces moyens de limitation de course peuvent être intégrés, faire partie d'une construction monobloc, ou/et être rapportés. Les masses comportent, avantageusement, des moyens de butée agencés pour coopérer avec des moyens de butée complémentaire que comportent les traverses 40A, 40B, pour limiter le déplacement des lames flexibles élastiques par rapport à ces traverses, en cas de chocs ou d'accélérations similaires.
- La
figure 5 illustre également une variante avantageuse où les moyens de transmission 16A, 16B, sont des lames flexibles élastiques. Il est, alors, possible de réaliser un ensemble monolithique comportant la structure 2, les résonateurs primaires 10 tels que décrits ci-dessus, notamment complets, et ces lames flexibles élastiques, et le doigt 150. - Les
figures 6 et 7 illustrent des variantes où les bielles sont des poutres comportant des cols aux deux extrémités en lieu et place des moyeux. Lafigure 6 illustre un cas de couplage de deux résonateurs primaires, lafigure 7 de trois tels résonateurs. Les moyens de transmission 16 comportent, ainsi, au moins une bielle monolithique agencée pour coopérer à la fois avec le moyen de commande 15 et avec au moins deux masses inertielles 5 d'autant de résonateurs primaires 10, et comportent au moins un col flexible au niveau de chaque zone d'articulation. - Les
figures 1, 2 ,3, et 5 illustrent un oscillateur horloger 1 comportant deux résonateurs primaires 10. - Dans une réalisation particulière, l'oscillateur horloger 1 comporte au moins trois résonateurs primaires 10.
- La
figure 8 illustre un oscillateur horloger 1 comportant trois résonateurs primaires 10. Cette figure montre l'application du couplage de lafigure 7 aux masses inertielles 5A, 5B, 5C, des trois résonateurs primaires 10A, 10B, 10C. - La
figure 9 illustre un oscillateur horloger 1 comportant quatre résonateurs. Ces quatre résonateurs peuvent être quatre résonateurs primaires 10. Ils peuvent aussi être quatre résonateurs élémentaires, constituant deux à deux des résonateurs primaires: l'un composé des résonateurs élémentaires 10A et 10C, déphasés de π, l'autre des résonateurs élémentaires 10B et 10D, également déphasés de π. - Pour les réalisations de ces
figures 8 et 9 , chaque résonateur pris isolément a une réaction à l'encastrement, et c'est la juxtaposition et la combinaison judicieuse des « n » résonateurs compense l'ensemble des réactions. - En somme, l'invention couvre l'ensemble des combinaisons entre des résonateurs primaires qui sont :
- ou bien chacun équilibré, ou bien équilibrés collectivement du fait de leur agencement particulier,
- équilibrés en translation ou/et en rotation.
- Les
figures 10 ,12, et 13 illustrent une variante où au moins un moyen de rappel élastique 6 constitue également un guidage rotatif, ce qui permet d'éviter les frottements inhérents à l'utilisation de pivots. - La
figure 10 montre un moyen de transmission 16 constitué par une lame flexible, dans la configuration de lafigure 9 . Cette figure montre également des butées angulaires : 71, 72, 710, 720, 76 sur la masse 5, les surfaces de butée complémentaires respectives 73, 74, 730, 740, 77 au niveau du cadre 4 sur lequel est attachée une lame flexible courte 6, et une surface de butée antichoc 75 sur la masse 5, agencée pour coopérer avec une surface complémentaire 750 au niveau du cadre 4. Ces antichocs intégrés sont particulièrement avantageux, et ne nécessitent aucun réglage. - Dans les variantes illustrées, selon l'invention, le mobile 13 est soumis à un mouvement de rotation ; plus particulièrement, les moyens moteurs 12 sont agencés pour entraîner le mobile 13 selon un mouvement de rotation, et le mobile 13 et les moyens d'entraînement et de guidage 14 sont agencés pour appliquer au moyen de commande 15 un effort essentiellement tangentiel par rapport à la rotation du mobile 13.
- La
figure 11 illustre une variante selon l'invention où le mobile 13 comporte une structure élastique 130 déformable, formant un guidage souple radialement et rigide tangentiellement, cette structure déformable 130 comporte un logement 140 pour coopérer avec le doigt 150 du moyen de commande 15, à l'articulation principale. - Dans les différentes variantes décrites ici, de préférence les moyens de rappel élastique 6 des résonateurs primaires 10 comportent des lames flexibles, et les résonateurs primaires 10 et/ou la structure commune 2, ou/et le cadre 4, comportent des butées radiales et/ou angulaires et/ou axiales agencées pour limiter les déformations des lames flexibles et pour éviter les ruptures en cas de chocs ou de couple moteur trop élevé.
- Dans une réalisation avantageuse, tel que visible notamment sur les
figures 12 et 13 , l'oscillateur horloger 1 comporte une structure monolithique qui regroupe une structure commune 4 vers laquelle sont rappelées les masses inertielles 5 par leurs moyens de rappel élastique 6, le moyen de commande 15 et ses articulations avec les moyens de transmission 16, et les moyens de transmission 16 avec leurs articulations aux masses inertielles 5. Les déphasages voulus sont parfaitement assurés, l'annulation des réactions également. - De telles structures monolithiques permettent la suppression des pivots traditionnels, en mettant en oeuvre des lames flexibles qui ont une double fonction : le guidage en pivotement constituant un pivot virtuel, et le rappel élastique.
- Avantageusement, cette structure monolithique comporte encore les butées.
- De préférence, l'orientation des moyens de rappel élastique 6 des résonateurs primaires 10 est optimisée de manière à ce que les erreurs de marche dues à la gravité s'annule entre les résonateurs primaires 10.
- Dans une variante non illustrée, les moyens de rappel élastique 6 des résonateurs primaires 10 sont des pivots virtuels à lames croisées.
- Dans une variante particulière de l'oscillateur horloger 1 selon invention, les résonateurs primaires 10 sont isochrones.
- De préférence, au moins les moyens élastiques que comporte l'oscillateur horloger 1 selon l'invention sont compensés thermiquement. Une réalisation en matériau micro-usinable permet d'assurer une telle compensation.
- L'invention concerne encore un mouvement d'horlogerie 100 comportant au moins un tel oscillateur horloger 1.
- L'invention concerne encore une montre 200 comportant au moins un tel mouvement 100.
- Les avantages de l'invention sont nombreux :
- l'utilisation de résonateurs rotatifs dont le centre de rotation est sensiblement confondu avec le centre de masse évite que le centre de masse se déplace dans le champ de gravité, et, partant, évite que la période soit affectée par un changement d'orientation de la montre. Le même argument explique que notre système est moins affecté par des chocs en translations ;
- de préférence, les résonateurs sont tous identiques et montés en parallèle. Les mouvements de l'un ne risquent donc pas de parasiter l'inertie de l'autre, contrairement aux montages en série ;
- l'utilisation de deux résonateurs, ou davantage, complètement distincts, c'est-à-dire avec une masse inertielle propre à chaque résonateur primaire ou élémentaire, permet d'optimiser l'isochronisme des résonateurs séparément, et de jouer sur leur orientation pour que les erreurs dues aux positions et les réactions à l'encastrement s'annulent. Cela est un grand avantage pour obtenir un oscillateur indépendant des positions de la montre, et ayant un facteur de qualité très élevé.
- la conception permet. une fabrication très simple de la version intégrée ;
- l'invention permet des réalisations dans la plus pure tradition horlogère puisqu'on peut simplement utiliser deux ensembles balancier-spiral reliés à la roue d'échappement par des bielles très légères ou des lames flexibles.
Claims (22)
- Oscillateur horloger (1) comportant une structure (2) ou/et un cadre (4), et une pluralité de résonateurs primaires distincts, déphasés temporellement et géométriquement, et comportant chacun au moins une masse inertielle (5) rappelée vers ladite structure (2) ou vers ledit cadre (4) par un moyen de rappel élastique (6), et chacun constitué d'un ou plusieurs résonateurs élémentaires, où ledit oscillateur horloger (1) comporte des moyens de couplage (11) agencés pour permettre l'interaction desdits résonateurs, lesdits moyens de couplage (11) comportant un mobile (13) agencé pour être soumis à un couple ou un effort moteur, lequel mobile (13) est soumis à un mouvement de rotation et comporte des moyens d'entraînement et de guidage (14) agencés pour entraîner et guider un moyen de commande (15) unique lequel est articulé autour d'un premier axe de commande avec une pluralité de moyens de transmission (16) chacun articulé autour d'un deuxième axe d'articulation, à distance dudit moyen de commande (15) unique, avec une dite masse inertielle (5) d'un dit résonateur primaire (10), et où lesdits résonateurs et ledit mobile (13) sont agencés de telle façon que lesdits deuxièmes axes d'articulation de deux quelconques desdits résonateurs et ledit premier axe de commande dudit moyen de commande (15) ne sont jamais coplanaires, où lesdits résonateurs élémentaires sont des résonateurs rotatifs caractérisé en ce que les centres de masse desdits résonateurs élémentaires restent, lors des oscillations normales desdits résonateurs, à une distance inférieure à quelques dizaines de micromètres des centres de rotation respectifs desdits résonateurs, et en ce que ledit mobile (13) comporte une structure élastique (130) formant un guidage souple radialement et rigide tangentiellement.
- Oscillateur horloger (1) selon la revendication 1, caractérisé en ce que la résultante des couples de réaction de l'ensemble desdits résonateurs par rapport à ladite structure commune (2) ou audit cadre (4) est nulle.
- Oscillateur horloger (1) selon la revendication 1, caractérisé en ce que ledit oscillateur (1) comporte un nombre n de dits résonateurs primaires, et en ce que lesdits résonateurs primaires ont au moins un mode de résonance sensiblement identique, et sont agencés pour vibrer selon un déphasage entre eux de la valeur 2π/n.
- Oscillateur horloger (1) selon l'une des revendications 1 à 3, caractérisé en ce qu'au moins un des résonateurs primaires (10) est constitué d'une pluralité de n résonateurs élémentaires (810), qui comportent chacun au moins une masse élémentaire portée par une lame flexible élastique élémentaire, constituant un moyen de rappel élastique, et qui est agencée pour travailler en flexion, et qui est encastrée dans une traverse élémentaire, et en ce que lesdits résonateurs élémentaires (810) ont au moins un mode de résonance sensiblement identique, et sont agencés pour vibrer selon un déphasage entre eux de la valeur 2π/n, où n est le nombre desdits résonateurs élémentaires (810).
- Oscillateur horloger (1) selon la revendication 4, caractérisé en ce que lesdits résonateurs élémentaires (810) sont agencés selon une symétrie dans l'espace, telle que la résultante des couples appliqués par les résonateurs élémentaires (810) sur ladite traverse élémentaire est nulle.
- Oscillateur horloger (1) selon l'une des revendications 1 à 5, caractérisé en ce que lesdits résonateurs primaires sont constitués chacun de plusieurs résonateurs élémentaires.
- Oscillateur horloger (1) selon l'une des revendications 1 à 6, caractérisé en ce que lesdits moyens de transmission (16) sont des lames flexibles élastiques.
- Oscillateur horloger (1) selon l'une des revendications 1 à 7, caractérisé en ce que lesdits moyens de transmission (16) comportent au moins une bielle monolithique agencée pour coopérer à la fois avec ledit moyen de commande (15) et avec au moins deux dites masses inertielles (5) d'autant de dits résonateurs, et comportent au moins un col flexible au niveau de chaque zone d'articulation.
- Oscillateur horloger (1) selon l'une des revendications 1 à 7, caractérisé en ce que lesdits moyens de transmission (16) comportent des bielles (160) comportant chacune une première articulation (161) avec ledit moyen de commande (15) et une deuxième articulation (162) avec ladite masse inertielle (5), ladite première articulation (161) et ladite deuxième articulation (162) définissant ensemble une direction de bielle, et caractérisé en ce que toutes lesdites directions de bielle font deux à deux, à tout instant, un angle différent de zéro ou π.
- Oscillateur horloger (1) selon l'une des revendications 1 à 9, caractérisé en ledit mobile (13) est soumis à un mouvement de rotation, et en ce que ledit mobile (13) et lesdits moyens d'entraînement et de guidage (14) sont agencés pour appliquer audit moyen de commande (15) un effort essentiellement tangentiel par rapport à ladite rotation dudit mobile (3).
- Oscillateur horloger (1) selon l'une des revendications 1 à 3 et 7 à 10, caractérisé en ce que lesdits moyens de rappel élastique (6) desdits résonateurs comportent des lames flexibles, et en ce que lesdits résonateurs et/ou ladite structure commune (2) ou ledit cadre (4) comportent des butées radiales et/ou angulaires et/ou axiales agencées pour limiter les déformations desdites lames flexibles et pour éviter les ruptures en cas de chocs ou de couple moteur trop élevé.
- Oscillateur horloger (1) selon l'une des revendications 1 à 3 et 7 à 11, caractérisé en ce que ledit oscillateur horloger (1) comporte une structure monolithique qui regroupe une structure commune (4) vers laquelle sont rappelées lesdites masses inertielles (5) et leurs dits moyens de rappel élastique (6), ledit moyen de commande (15) et ses articulations avec lesdits moyens de transmission (16), et lesdits moyens de transmission (16) avec leurs articulations auxdites masses inertielles (5).
- Oscillateur horloger (1) selon les revendications 11 et 12, caractérisé en ce que ladite structure monolithique comporte encore lesdites butées.
- Oscillateur horloger (1) selon la revendication 12 ou 13, caractérisé en ce que ladite structure monolithique est un prisme droit délimité par deux plans parallèles entre eux et perpendiculaires à la direction d'élongation dudit prisme.
- Oscillateur horloger (1) selon l'une des revendications 1 à 14, caractérisé en ce que lesdits moyens de rappel élastique (6) desdits résonateurs comportent des lames rectilignes courtes, d'une longueur inférieure à la plus petite valeur entre quatre fois leur hauteur ou trente fois leur épaisseur.
- Oscillateur horloger (1) selon l'une des revendications 1 à 15, caractérisé en ce que lesdits résonateurs sont isochrones.
- Oscillateur horloger (1) selon l'une des revendications 1 à 16, caractérisé en ce que lesdits résonateurs forment ensemble un mécanisme oscillateur isochrone de type diapason dit en H et comportent chacun des lames flexibles élastiques constituées par des lames droites et courtes, d'une longueur inférieure à la plus petite valeur entre quatre fois leur hauteur ou trente fois leur épaisseur, disposées de part et d'autre d'une traverse (40A; 40B), avec laquelle elle forment la barre horizontale d'un H dont lesdites masses (5) forment les barres verticales.
- Oscillateur horloger (1) selon l'une des revendications 1 à 16, caractérisé en ce que lesdits résonateurs forment ensemble un mécanisme oscillateur isochrone de type diapason dit en cornes de bouc et comportent chacune une traverse (40A ; 40B) portant des dites masses (5) chacune montée de façon oscillante et rappelée par une lame flexible élastique qui est un spiral ou un assemblage de spiraux, chaque dit spiral étant lié directement ou indirectement à une dite masse (5) au niveau de sa spire interne, et attachés à ladite traverse (40A ; 40B) par sa spire externe, chaque dit spiral étant à section ou courbure variable le long de son développement.
- Oscillateur horloger (1) selon l'une des revendications 1 à 17, caractérisé en ce que au moins un dit moyen de rappel élastique (6) constitue également un guidage rotatif.
- Oscillateur horloger (1) selon l'une des revendications 1 à 19, caractérisé en ce qu'au moins les moyens élastiques que comporte ledit oscillateur horloger (1) sont compensés thermiquement.
- Mouvement d'horlogerie (100) comportant au moins un oscillateur horloger (1) selon une des revendications 1 à 20.
- Montre (200) comportant au moins un mouvement (100) selon la revendication 21.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15153657.0A EP3054357A1 (fr) | 2015-02-03 | 2015-02-03 | Mécanisme oscillateur d'horlogerie |
| EP16152268.5A EP3054358B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
Related Parent Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16152268.5A Division EP3054358B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
| EP16152268.5A Division-Into EP3054358B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3293584A1 EP3293584A1 (fr) | 2018-03-14 |
| EP3293584B1 true EP3293584B1 (fr) | 2022-03-30 |
Family
ID=52434684
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15153657.0A Withdrawn EP3054357A1 (fr) | 2015-02-03 | 2015-02-03 | Mécanisme oscillateur d'horlogerie |
| EP16152268.5A Active EP3054358B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
| EP17192071.3A Active EP3293584B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15153657.0A Withdrawn EP3054357A1 (fr) | 2015-02-03 | 2015-02-03 | Mécanisme oscillateur d'horlogerie |
| EP16152268.5A Active EP3054358B1 (fr) | 2015-02-03 | 2016-01-21 | Mecanisme oscillateur d'horlogerie |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9465363B2 (fr) |
| EP (3) | EP3054357A1 (fr) |
| JP (1) | JP6114845B2 (fr) |
| CN (2) | CN105843026B (fr) |
| CH (1) | CH710692B1 (fr) |
| RU (1) | RU2692817C2 (fr) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6661543B2 (ja) * | 2014-01-13 | 2020-03-11 | エコール・ポリテクニーク・フェデラル・ドゥ・ローザンヌ (ウ・ペ・エフ・エル)Ecole Polytechnique Federale De Lausanne (Epfl) | 脱進機のない、または簡易脱進機を有する一般2自由度等方性調和振動子および関連するタイムベース |
| WO2015104692A2 (fr) | 2014-01-13 | 2015-07-16 | Ecole Polytechnique Federale De Lausanne (Epfl) | Oscillateur harmonique isotrope a direction x et y et base de temps associe sans echappement ou a echappement simplifie |
| WO2016037717A2 (fr) * | 2014-09-09 | 2016-03-17 | Eta Sa Manufacture Horlogère Suisse | Mecanisme de synchronisation de deux oscillateurs d'horlogerie avec un rouage |
| EP3035126B1 (fr) * | 2014-12-18 | 2017-12-13 | The Swatch Group Research and Development Ltd. | Résonateur d'horlogerie à lames croisées |
| WO2016124436A1 (fr) * | 2015-02-03 | 2016-08-11 | Eta Sa Manufacture Horlogere Suisse | Resonateur isochrone d'horlogerie |
| CH710692B1 (fr) * | 2015-02-03 | 2021-09-15 | Eta Sa Mft Horlogere Suisse | Mécanisme oscillateur d'horlogerie. |
| US20190227493A1 (en) * | 2016-07-06 | 2019-07-25 | Ecole Polytechnique Federale De Lausanne (Epfl) | General 2 Degree of Freedom Isotropic Harmonic Oscillator and Associated Time Base Without Escapement or with Simplified Escapement |
| EP3312683B1 (fr) | 2016-10-18 | 2019-02-20 | ETA SA Manufacture Horlogère Suisse | Mouvement mecanique d'horlogerie avec resonateur a deux degres de liberte avec mecanisme d'entretien par galet roulant sur une piste |
| EP3312682B1 (fr) | 2016-10-18 | 2019-02-20 | ETA SA Manufacture Horlogère Suisse | Resonateur a haut facteur de qualite pour montre mecanique |
| CH713069A2 (fr) * | 2016-10-25 | 2018-04-30 | Eta Sa Mft Horlogere Suisse | Montre mécanique avec résonateur rotatif isochrone, insensible aux positions. |
| CH713137A2 (fr) * | 2016-11-16 | 2018-05-31 | Swatch Group Res & Dev Ltd | Protection d'un mécanisme résonateur à lames contre les chocs axiaux. |
| FR3059792B1 (fr) * | 2016-12-01 | 2019-05-24 | Lvmh Swiss Manufactures Sa | Dispositif pour piece d'horlogerie, mouvement horloger et piece d'horlogerie comprenant un tel dispositif |
| EP3336613B1 (fr) * | 2016-12-16 | 2020-03-11 | Association Suisse pour la Recherche Horlogère | Resonateur pour piece d'horlogerie comportant deux balanciers agences pour osciller dans un meme plan |
| CH713288A1 (fr) * | 2016-12-23 | 2018-06-29 | Sa De La Manufacture Dhorlogerie Audemars Piguet & Cie | Composant monolithique flexible pour pièce d'horlogerie. |
| CH713829B1 (fr) * | 2017-05-24 | 2022-01-14 | Mft Dhorlogerie Audemars Piguet Sa | Dispositif de régulation pour pièce d'horlogerie avec oscillateur harmonique isotrope ayant des masses rotatives et une force de rappel commune. |
| WO2018215284A1 (fr) | 2017-05-24 | 2018-11-29 | Sa De La Manufacture D'horlogerie Audemars Piguet & Cie | Dispositif de régulation pour pièce d'horlogerie avec oscillateur harmonique isotrope ayant des masses rotatives et une force de rappel commune |
| CH713960B1 (fr) * | 2017-07-07 | 2023-08-31 | Eta Sa Mft Horlogere Suisse | Elément sécable pour oscillateur d'horlogerie. |
| EP3435173B1 (fr) * | 2017-07-26 | 2020-04-29 | ETA SA Manufacture Horlogère Suisse | Mouvement mécanique avec résonateur rotatif, isochrone, insensible aux positions |
| JP7000585B2 (ja) * | 2017-10-02 | 2022-01-19 | マニュファクチュール・ドルロジュリ・オーデマ・ピゲ・ソシエテ・アノニム | 回転錘と共通の反動力を持つ調和振動子を備えた時計設定装置 |
| WO2019141789A1 (fr) | 2018-01-18 | 2019-07-25 | Ecole polytechnique fédérale de Lausanne (EPFL) | Oscillateur horloger |
| EP3561607B1 (fr) | 2018-04-23 | 2022-03-16 | ETA SA Manufacture Horlogère Suisse | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif |
| EP3561609B1 (fr) | 2018-04-23 | 2022-03-23 | ETA SA Manufacture Horlogère Suisse | Protection antichoc d'un mecanisme résonateur a guidage flexible rotatif |
| EP3561605B1 (fr) * | 2018-04-25 | 2020-10-28 | The Swatch Group Research and Development Ltd | Mécanisme régulateur d'horlogerie à résonateurs articulés |
| EP3561606B1 (fr) * | 2018-04-27 | 2022-01-26 | The Swatch Group Research and Development Ltd | Protection antichoc d'un résonateur à lames a pivot rcc |
| EP3572885B1 (fr) * | 2018-05-25 | 2022-04-20 | ETA SA Manufacture Horlogère Suisse | Oscillateur mécanique d'horlogerie isochrone en toute position |
| EP3627242B1 (fr) | 2018-09-19 | 2021-07-21 | The Swatch Group Research and Development Ltd | Mecanisme d'echappement d'horlogerie magneto-mecanique optimise |
| EP3719584A1 (fr) * | 2019-04-02 | 2020-10-07 | Ecole Polytechnique Fédérale de Lausanne (EPFL) | Système d'oscillateur à deux degrés de liberté |
| EP3739394A1 (fr) | 2019-05-16 | 2020-11-18 | Ecole Polytechnique Fédérale de Lausanne (EPFL) | Agencement à manivelle destiné à entraîner un oscillateur mécanique |
| EP3842876A1 (fr) * | 2019-12-24 | 2021-06-30 | The Swatch Group Research and Development Ltd | Piece d horlogerie munie d'un mouvement mecanique et d'un dispositif de correction d'une heure affichee |
| EP3926412A1 (fr) * | 2020-06-16 | 2021-12-22 | Montres Breguet S.A. | Mécanisme régulateur d'horlogerie |
| EP3982204A1 (fr) | 2020-10-08 | 2022-04-13 | The Swatch Group Research and Development Ltd | Resonateur d'horlogerie comportant au moins un guidage flexible |
| EP4191346B1 (fr) | 2021-12-06 | 2024-06-26 | The Swatch Group Research and Development Ltd | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif |
| CH720138A2 (fr) | 2022-10-18 | 2024-04-30 | Goujon Pierre | Dispositif d'affichage d'indications discrètes |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE451035C (de) * | 1922-11-10 | 1927-10-22 | Heinrich Schieferstein | Elastische Kopplung zwischen einem Triebwerk, insbesondere einem Uhrwerk und einem dessen Ablauf regelnden Glied |
| CH113025A (de) * | 1924-04-28 | 1925-12-16 | Heinrich Schieferstein Georg | Verfahren zur Steuerung eines Drehbewegungen ausführenden Mechanismus. |
| CH474466A (de) * | 1961-06-20 | 1969-06-30 | Inventa Ag | Verfahren zur Herstellung von Cyclodecen-(5)-on-(1) |
| DE1205464B (de) * | 1961-08-24 | 1965-11-18 | United States Time Corp | Gangregler |
| CH452443A (fr) * | 1964-07-10 | 1968-05-31 | Movado Montres | Oscillateur pour pièces d'horlogerie |
| CH451021A (fr) * | 1965-05-28 | 1968-05-15 | Ebauches Sa | Oscillateur symétrique à flexion pour pièce d'horlogerie |
| CH485145A (fr) | 1966-03-29 | 1970-01-31 | Ebauches Sa | Dispositif transformant les mouvements oscillants d'un résonateur acoustique en mouvements rotatifs d'une roue de comptage |
| CH481411A (fr) * | 1967-06-27 | 1969-12-31 | Movado Montres | Résonateur de rotation mécanique pour appareil de mesure du temps |
| DE1805777A1 (de) * | 1968-10-29 | 1970-05-21 | Kienzle Uhrenfabriken Gmbh | Schwingsystem |
| GB1293159A (en) * | 1969-12-10 | 1972-10-18 | Suwa Seikosha Kk | A vibrator for an electric timepiece |
| JP3614009B2 (ja) * | 1998-12-21 | 2005-01-26 | セイコーエプソン株式会社 | 圧電アクチュエータ、圧電アクチュエータの駆動方法、携帯機器および時計 |
| DE602008006057D1 (de) * | 2008-07-04 | 2011-05-19 | Swatch Group Res & Dev Ltd | Gekoppelte Resonatoren für Uhr |
| CH702062B1 (fr) * | 2009-10-26 | 2022-01-31 | Mft Dhorlogerie Audemars Piguet Sa | Organe régulateur comportant au moins deux balanciers, un mouvement de montre ainsi qu'une pièce d'horlogerie comportant un tel organe. |
| US9201398B2 (en) * | 2010-07-19 | 2015-12-01 | Nivarox-Far S.A. | Oscillating mechanism with an elastic pivot and mobile element for transmitting energy |
| CH707171A2 (fr) * | 2012-11-09 | 2014-05-15 | Nivarox Sa | Mécanisme horloger de limitation ou transmission. |
| WO2015104692A2 (fr) * | 2014-01-13 | 2015-07-16 | Ecole Polytechnique Federale De Lausanne (Epfl) | Oscillateur harmonique isotrope a direction x et y et base de temps associe sans echappement ou a echappement simplifie |
| JP6661543B2 (ja) | 2014-01-13 | 2020-03-11 | エコール・ポリテクニーク・フェデラル・ドゥ・ローザンヌ (ウ・ペ・エフ・エル)Ecole Polytechnique Federale De Lausanne (Epfl) | 脱進機のない、または簡易脱進機を有する一般2自由度等方性調和振動子および関連するタイムベース |
| CH710692B1 (fr) * | 2015-02-03 | 2021-09-15 | Eta Sa Mft Horlogere Suisse | Mécanisme oscillateur d'horlogerie. |
-
2015
- 2015-02-03 CH CH00140/15A patent/CH710692B1/fr unknown
- 2015-02-03 EP EP15153657.0A patent/EP3054357A1/fr not_active Withdrawn
-
2016
- 2016-01-21 EP EP16152268.5A patent/EP3054358B1/fr active Active
- 2016-01-21 EP EP17192071.3A patent/EP3293584B1/fr active Active
- 2016-02-02 JP JP2016017696A patent/JP6114845B2/ja active Active
- 2016-02-02 CN CN201610150689.5A patent/CN105843026B/zh active Active
- 2016-02-02 RU RU2016103417A patent/RU2692817C2/ru active
- 2016-02-02 US US15/013,539 patent/US9465363B2/en active Active
- 2016-02-02 CN CN201620203744.8U patent/CN205539955U/zh not_active Withdrawn - After Issue
Also Published As
| Publication number | Publication date |
|---|---|
| CH710692A2 (fr) | 2016-08-15 |
| JP6114845B2 (ja) | 2017-04-12 |
| CN205539955U (zh) | 2016-08-31 |
| US9465363B2 (en) | 2016-10-11 |
| EP3054357A1 (fr) | 2016-08-10 |
| CN105843026A (zh) | 2016-08-10 |
| US20160223989A1 (en) | 2016-08-04 |
| JP2016142736A (ja) | 2016-08-08 |
| CN105843026B (zh) | 2018-04-20 |
| CH710692B1 (fr) | 2021-09-15 |
| EP3054358B1 (fr) | 2019-08-28 |
| RU2692817C2 (ru) | 2019-06-28 |
| EP3054358A1 (fr) | 2016-08-10 |
| EP3293584A1 (fr) | 2018-03-14 |
| RU2016103417A (ru) | 2017-08-07 |
| RU2016103417A3 (fr) | 2019-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3293584B1 (fr) | Mecanisme oscillateur d'horlogerie | |
| EP3254158B1 (fr) | Resonateur isochrone d'horlogerie | |
| EP3206089B1 (fr) | Mécanisme résonateur d'horlogerie | |
| EP3035127B1 (fr) | Oscillateur d'horlogerie à diapason | |
| EP2911012B1 (fr) | Oscillateur de pièce d'horlogerie | |
| EP3561607B1 (fr) | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif | |
| EP3206091B1 (fr) | Résonateur isochrone d'horlogerie | |
| EP3200029B1 (fr) | Mécanisme résonateur d'horlogerie | |
| CH715526A2 (fr) | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif. | |
| EP3435172B1 (fr) | Procede de realisation d'un mecanisme de guidage flexible pour oscillateur mecanique d'horlogerie | |
| EP3667432B1 (fr) | Résonateur d'horlogerie comportant au moins un guidage flexible | |
| CH714922A2 (fr) | Protection antichoc d'un mécanisme résonateur d'horlogerie à guidage flexible rotatif. | |
| EP3561606B1 (fr) | Protection antichoc d'un résonateur à lames a pivot rcc | |
| EP3435173B1 (fr) | Mouvement mécanique avec résonateur rotatif, isochrone, insensible aux positions | |
| EP3336613B1 (fr) | Resonateur pour piece d'horlogerie comportant deux balanciers agences pour osciller dans un meme plan | |
| EP3451073B1 (fr) | Oscillateur d'horlogerie à guidages flexibles à grande course angulaire | |
| CH714030A2 (fr) | Oscillateur d'horlogerie à guidages flexibles à grande course angulaire. | |
| EP4047424A1 (fr) | Composant à pivot flexible, notamment pour l' horlogerie | |
| EP3637196B1 (fr) | Oscillateur mécanique | |
| EP3572885B1 (fr) | Oscillateur mécanique d'horlogerie isochrone en toute position | |
| EP3435171B1 (fr) | Oscillateur d'horlogerie a guidages flexibles a grande course angulaire | |
| EP3812842B1 (fr) | Dispositif de guidage en pivotement pour une masse pivotante et mécanisme résonateur d'horlogerie | |
| CH714936B1 (fr) | Protection antichoc d'un résonateur à lames à pivot RCC. | |
| EP4432019A1 (fr) | Procede de mise au point d'un mecanisme resonateur a guidage flexible rotatif pour diminuer les oscillations hors plan | |
| EP4191346A1 (fr) | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3054358 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20180914 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20200710 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602016070657 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: G04B0017280000 Ipc: G04B0017040000 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: G04B 43/00 20060101ALI20211117BHEP Ipc: G04B 17/28 20060101ALI20211117BHEP Ipc: G04B 17/08 20060101ALI20211117BHEP Ipc: G04B 17/06 20060101ALI20211117BHEP Ipc: G04B 17/04 20060101AFI20211117BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20211209 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3054358 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602016070657 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1479762 Country of ref document: AT Kind code of ref document: T Effective date: 20220415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220630 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220630 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20220330 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1479762 Country of ref document: AT Kind code of ref document: T Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220701 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220801 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220730 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602016070657 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20230103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230121 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20230131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230131 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231219 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230121 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20231219 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231219 Year of fee payment: 9 Ref country code: CH Payment date: 20240202 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220330 |