EP3002243A1 - Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée - Google Patents
Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée Download PDFInfo
- Publication number
- EP3002243A1 EP3002243A1 EP14187115.2A EP14187115A EP3002243A1 EP 3002243 A1 EP3002243 A1 EP 3002243A1 EP 14187115 A EP14187115 A EP 14187115A EP 3002243 A1 EP3002243 A1 EP 3002243A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- guide
- car
- gear
- elevator system
- drive unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/02—Kinds or types of lifts in, or associated with, buildings or other structures actuated mechanically otherwise than by rope or cable
- B66B9/022—Kinds or types of lifts in, or associated with, buildings or other structures actuated mechanically otherwise than by rope or cable by rack and pinion drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/2408—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration where the allocation of a call to an elevator car is of importance, i.e. by means of a supervisory or group controller
- B66B1/2433—For elevator systems with a single shaft and multiple cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/3415—Control system configuration and the data transmission or communication within the control system
- B66B1/3446—Data transmission or communication within the control system
- B66B1/3461—Data transmission or communication within the control system between the elevator control system and remote or mobile stations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/003—Kinds or types of lifts in, or associated with, buildings or other structures for lateral transfer of car or frame, e.g. between vertical hoistways or to/from a parking position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/10—Kinds or types of lifts in, or associated with, buildings or other structures paternoster type
Definitions
- the technology described herein generally relates to elevator systems with multiple cabins in a shaft.
- the technology relates in particular to those elevator systems in which the cabs can be moved individually on a closed rail track.
- Various embodiments of the technology relate in particular to embodiments of the rail track and a drive unit.
- a cab travels along a linear lane to transport a passenger from a boarding stall to a boarding deck.
- the cab is suspended from a suspension means which connects the car to a counterweight and is driven by a drive motor.
- Guide rails installed in an elevator shaft form the linear roadway and extend between a pit (lower pit area) and a pit top (upper pit area).
- the drive motor is arranged in the shaft head or a separate machine room.
- This elevator system has a closed rail track consisting of two vertical track sections and two horizontal track sections (an upper section and a lower section) connecting the vertical track sections.
- several cabins can be moved on the rail track; Each cabin is individually driven by a motor. Up and down movements of a car are made by means of a drive gear and a brake.
- a cabin is displaceable horizontally from one vertical track part to the other vertical track part by a hydraulic or pneumatic cylinder.
- JP 2004269193 describes an elevator system with a closed carriageway, on which several self-propelled cabins are movable. To route a cabin from one vertical link to another vertical link, Switches are provided which insert horizontal track parts. The switches are adjusted by a gear transmission. At the upper part of a cabin and at the lower part of the cabin, a roller drive is present, the rollers exert force on a guide rail to move the car.
- an elevator system having a guide rail system, a cab, and a drive unit disposed on the cab.
- the guide rail system forms a closed roadway along which the cabin can be moved between floors in operation.
- the drive unit has a motor, a gear system coupled to the motor by means of an axle and a guide disk, wherein the motor drives the gear system in operation.
- the guide rail system has a pinion system and spaced guide edges which cooperate with the guide disc.
- the gear system acts on the pinion system in operation to move the cab along the roadway.
- the cab is driven by the drive unit disposed on the cab.
- Such a self-propelled cab can move relatively freely on the closed carriageway without being limited to vertical up / down movements by carrying ropes, slings, or hydraulic cylinders.
- the free mobility allows, inter alia, cornering and circulating trips with or without reversal.
- the technology is so flexible that only vertical up / down movements can be carried out as required (eg with few travel requests (eg at night)).
- the technology also allows several cabins to be present which are independently movable on the closed lane. This increases the capacity of the elevator system. For example, increased capacity may be desired in a commercial building in the morning, evening, and / or lunchtime when many people wish to travel from one floor to another floor.
- the technology also offers a high degree of flexibility: Outside these times, when relatively few travel requirements exist, cabins that are not needed for such traffic can be temporarily taken out of service ("parked").
- a central control unit and a fixed number of floor terminals are present, and each car has a local control unit.
- the central control unit is communicatively connected to the floor terminals and the local control units.
- the central control unit thus knows at any time the status (eg movement parameters including position data as exemplary status parameters) of a car. For example, when a destination call comes in, the central control unit uses the status information of all cars to select a car suitable for that destination call. The cabin selected in this way then receives from the central control unit a corresponding control command.
- the communicative connection between the central control unit and the local control units takes place in one embodiment via a radio network, for. B. a WLAN.
- a radio network for. B. a WLAN.
- the floor terminals can communicate either via the radio network or a wired communication network with the central control unit.
- the pinion system includes a plurality of first and first spaced apart first bolts and a plurality of second spaced and spaced second bolts.
- the first row and the second row are arranged along a common line on a first guide part of the guide system.
- the bolts are visible along the guide system and therefore, for example, by a service technician verifiable; this can replace them if necessary, without larger parts of the guide system would have to be replaced.
- the first bolts on a first side of the first guide part in a first direction and the second bolts on a second side of the first guide part in a second direction, wherein the first direction is opposite to the second direction ,
- the gear system has a first gear disk and a second gear disk spaced therefrom and disposed on the axle.
- the guide disk is arranged between the first and the second gear wheel on the axis.
- the guide disk has, for example, a guide groove in which the guide edges engage.
- the functions guide and drive are therefore close together on the drive unit. This has the advantage that dimensional tolerances, z. B. respect. Distance between leading edge and guide, must be complied with only over small distances; This is easier in a small space than at long distances.
- the gear wheels are rotated against each other, for example by half a pitch. This ensures that always engages at least one gear in the pinion system and continuously exerts a force on the pinion system, but also provides a continuous guidance, regardless of whether the cabin is moved horizontally or vertically.
- a conductor track is arranged on the guide rail system with which the drive unit is in electrical contact in order to supply the drive unit with electrical energy.
- the guide rail system has a guide angle that extends along a vertical span of the guide rail system.
- the guide bracket engages in a coupled with the cabin recording.
- the receptacle can be configured as a guide groove on the cabin.
- the receptacle can also be configured as a guide groove on a guide shoe.
- the guide shoe is not rotatably mounted on the axis.
- the guide shoe according to an exemplary embodiment has parts which define travel paths.
- On the pinion system a guide profile is fixed, which is feasible in one of the driving ways. This ensures that the drive unit is guided as long as possible on the guide rail system.
- Fig. 1 shows a perspective and schematic representation of an embodiment of an elevator system 1 with a guide system 4 for a plurality of self-propelled cabins 2 in first positions.
- Fig. 2 shows an enlarged illustration of a lower portion of the elevator system 1 from Fig. 1 from another perspective, with the cabins 2 in second positions. In both positions, the elevator cars 2 are in the lower region of the guide system 4; in Fig. 1 Both cabins 2 are located on vertical sections of the guidance system 4, and in Fig. 2 is one of the cabins 2 on a horizontal section of the guide system 4 while the other car 2 is located on a vertical route.
- Such an elevator system 1 is usually installed in a shaft within a multistory building.
- a shaft can be designed differently, for example as a shaft with four walls, or as a shaft with less than four walls, for example as a so-called panoramic elevator.
- Fig. 1 and Fig. 2 neither a shaft nor mounting structures, shaft doors or single storeys.
- the guide system 4 is fastened in the shaft by various fastening structures. Parts of these attachment structures are exemplary in FIG Fig. 4 shown.
- a hoistway gate shuts off the hoistway to prevent access when there is no booth 2 on the floor.
- Fig. 1 and Fig. 2 No cabin doors are shown, only openings 6 in the cabins 2. In the region of an opening 6, the car door is arranged, which closes or opens the opening 6.
- the guide system 4 consists of a door-side (or front) sub-system 4a and a back-side (or rear) sub-system 4b (viewed from the floor).
- Each subsystem 4a, 4b has vertical track sections 4a1, 4a2, 4b1, 4b2 and horizontal track sections 4a3, 4b3 in the upper and lower sections.
- the horizontal track parts 4a3, 4b3 connect the vertical track parts 4a1, 4a2, 4b1, 4b2 with each other; The connection of the track parts results in a closed rail track for the cars 2.
- the subsystems 4a, 4b are offset from one another laterally.
- the left car 2 drives along the vertical track parts 4a1, 4b 1 and the right car 2 along the vertical track part 4a2, 4b2.
- the vertical track parts 4a1, 4b1; 4a2, 4b2 are laterally spaced from each other. In one exemplary embodiment, this distance corresponds approximately to a door-side width of the car 2 and allows the car 2 to be entered or left through the opening 6 on a floor in this clearance.
- Each car 2 is self-propelled, ie, there is a drive unit 8 on the car 2, which is controlled by a local and / or central elevator control (see description of FIG Fig. 18 ) - on the guide system 4 exerts a force to move the car 2.
- the drive unit 8 is arranged on a roof of the car 2.
- two drive units 8 are arranged on the roof of the car 2, wherein a door-side (front) drive unit 8 exerts force on the door-side subsystem 4a, and a rear (rear) drive unit 8 force on the back subsystem 4b exerts.
- the drive units 8 are arranged diagonally, in Fig. 1 and Fig. 2 each front left and right rear.
- the two drive units 8 are controlled by the converters assigned to them in such a way that they are operated synchronously with one another. This can be achieved, for example, by adjusting the two converters with respect to their respective driving curves in operation.
- each drive unit 8 has a gear system 10 which engages the rack system.
- the combination of the rack system and the gear system 10 forms a rack and pinion.
- Each drive unit 8 also has, inter alia, a motor, a transmission and a brake. Details of the rack and pinion system are exemplary in connection with Fig. 6 and details of the drive unit 8 are exemplary in connection with Fig. 8 - Fig. 10 described.
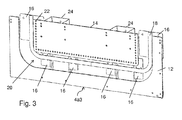
- Fig. 3 shows a schematic embodiment of a horizontal track portion 4a3 of the guide system 4 of the in Fig. 1
- a lower part of the elevator system 1 is shown in the lower part of the elevator system. this also applies to corresponding rear track parts.
- the track part 4a3 shown has a guide part 12 and a guide part 14, which are made of sheet steel and as flat profiles and lie in a (common) plane (in the installed state, they lie in a vertical plane).
- the guide members 12, 14 are spaced apart, so that there is a clearance between these parts 12, 14. This clearance is referred to below as the lane 20, because there drive parts of the drive unit 8 along.
- This lane 20 extends in the plane of the guide members 12, 14 along the door-side subsystem 4a and is a closed lane, ie a lane without beginning and end, which can be bypassed as often as without passing, for example, a transition point or leave guides; this is similar to the principle of a paternoster lift.
- a corresponding roadway is present in the rear subsystem 4b.
- the guide member 14 is attached to a support structure 24.
- the guide member 12 is also attached to a support structure, however, in Fig. 3 not shown.
- a conductor track 18 is shown, which is held by fastening elements 16 in a plane parallel to the plane of the guide parts 12, 14.
- the fastening elements 16 are made, for example, from electrically insulating material (eg plastic) in order to electrically isolate the conductor track 18 from conductive parts of the guide system 4.
- the conductor track 18 runs as a closed path parallel to the roadway 20.
- the drive unit 8 contacts the conductor track 18 and is supplied via the conductor track 18, for example, the subsystem 4a, with electrical energy.
- the circuit is closed by the drive unit 8 and the track 18 of the subsystem 4b.
- the spacing of said planes is dependent on the size of the drive unit 8 and chosen so that a contact element of the drive unit 8 is in constant contact with the conductor track 18 during operation.
- the conductor track 18 is a flat profile.
- the conductor track 18 is a groove profile with a longitudinal groove in which a sliding contact can be used.
- the transmission of the electrical energy can also be effected by contact without induction.
- the guide member 14 has in the embodiment shown a plurality of spaced and juxtaposed recesses 22.
- the recesses 22 are located in edge regions of the guide member 14. In one embodiment, these recesses 22 holes and take on bolts that are part of the rack system and in the Gear system 10 of the drive unit 8 engages. A guide member 14 with such bolts is in communication with Fig. 6 described.
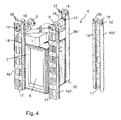
- Fig. 4 shows an illustration of the guide system 4 with a car arranged therein 2 and two drive units 8 on the roof of the car 2.
- the guide system 4 are parts of the vertical track parts 4a1, 4b1; 4a2, 4b2.
- the cabin 2 shown could, for example, be located on a floor, not shown, with the opening 6 facing the floor.
- Fig. 4 Fastening structures with which the guide system 4 is mounted in the shaft include mounting rails 17, of which Fig. 4 one each vertical track part 4a1, 4a2, 4b1, 4b2 shows.
- the fasteners 16 and the tracks 18 are also on attached to the mounting rails 17.
- Fig. 4 illustrates that the car 2 is guided by the vertical track parts 4a1, 4b1 and engages each gear system 10 of a drive unit 8 in the present on each track part 4a1, 4b1 rack system.
- vertical track portions 4a2, 4b2 can drive a further car 2 along. there the drive units 8 of this (further) car 2 engage in the rack systems of the track parts 4a2, 4b2.
- Fig. 5 shows a schematic embodiment of the guide system 4 in a perspective view.
- the following sizes and distances are examples; A person skilled in the art recognizes that this information can vary depending on the design of the elevator system 1 (for example with regard to cabin load).
- Shown is a part of the fastening rail 17, which has a U-shaped cross-sectional profile with a wall part 17a and two side parts 17b, 17c.
- the conductor 18 is fixed, for example, by means of in Fig. 3
- Each side part 17b, 17c has at its free end a flange to which one of the guide parts 12, 14 is attached.
- the guide member 14 is fixed and on the side part 17c, the guide member 12.
- the guide members 12, 14 are mounted so that they laterally into a space 19 (s. Fig. 6 ), which is formed by the side parts 17b, 17c and the wall part 17a, protrude and limit this.
- a guide bracket 32 is fixed, which extends along the guide member 12.
- the legs of the guide angle 32 form an angle of about 45 °. Depending on the configuration, the legs can also enclose another angle.
- a leg of the guide angle 32 engages in a guide groove 33 (s. Fig. 4 and Fig. 7 ) on the car 2 to stabilize the car 2 while driving.
- the rack system comprising the bolts 28, 30, arranged on the guide member 14, the rack system comprising the bolts 28, 30, arranged.
- a plurality of spaced apart bolts 30 are arranged in a row, with ends of the bolts 30 in the recesses 22 (FIGS. Fig. 3 ) of the guide member 14 are fixed and stuck and point away from the wall portion 17 a.
- the bolts 28 are also arranged in the same row and spaced by the same spaces, wherein the ends are also secured in the recesses 22 of the guide member 14 and stuck, but to the wall portion 17 a point.
- the bolts 28 into the space 19, or are located for the most part in the space 19, and the bolts 30 are largely outside the space 19th
- the bolts 28, 30 are screwed into the recesses 22.
- Fig. 5 is visible that the row of bolts 30 is arranged offset from the row of bolts 28. That is, looking at the recesses 22 in Fig. 3 , the bolts 28, 30 alternate along the row of recesses 22.
- the distances between the individual bolts 28, 30 are in one embodiment about 30 mm to about 50 mm, for example about 40 mm.
- the distance from a bolt 28 to a bolt 28 is then about 60 mm to about 100 mm, for example about 80 mm; this corresponds to the bolt spacing for the gear 10b.
- the bolts 28, 30 are not arranged alternately in the recesses 22. In this variant, only every second recess 22 is used. In these recesses 22 then "double-sided" bolts are installed, for example, two bolts 28, 30 are connected through the recess 22 with a grub screw. The gears 10a, 10b are not mounted offset in this arrangement.
- Fig. 6 shows a cross section through the in Fig. 5 shown embodiment.
- the guide members 12, 14 are spaced from each other in a plane substantially parallel to a plane of the wall member 17a. Between a leading edge 12a of the guide part 12 and a leading edge 14a of the guide part 14 there is a distance D which is substantially constant along the roadway 20. In one embodiment, the distance D is about 200 mm to 350 mm, for example about 250 mm.
- the bolts 28, 30 are perpendicular to the guide member 14. In the illustrated embodiment, the bolts 28, 30 extend through the recesses 22.
- the bolts 28, 30 are made in one embodiment of chrome steel, have a diameter of about 20 mm to about 40 mm, for example about 30 mm, and a length of about 50 mm to about 120 mm, for example 80 mm.
- the bolts 28, 30 are screwed into the recesses 22.
- the bolts 28, 30 may be secured in recesses 22, for example by welding, soldering or gluing.
- an information provider 31st visible, noticeable in one embodiment, includes an RFID tag that stores specified information that is stored in an RFID tag Fig. 7 shown reader 37, such as an RFID reader, can be read.
- a plurality of such RFID tags are arranged along the guide angle 32.
- the distance between the individual RFID tags can be chosen flexibly, depending on the desired accuracy. In one embodiment, the distance is about 25 cm to about 40 cm, for example, 32 cm).
- the information transmitter 31 can also be designed as a band or strip with a code located thereon, which code can be read by a corresponding reader.
- the code may be continuous along the tape or strip.
- the code has a plurality of discrete codes present along the tape or strip, for example barcodes or QR code.
- the information transmitter 31 contains, for example, position information, speed information (for example maximum speed at a specific location) and route information (for example "straight-line travel" or "cornering"). Further details regarding the implementation and use of the information provider 31 are in connection with Fig. 18 described.
- Fig. 7 is a schematic illustration of a plan view of the drive system 8 in interaction with the guide system 4. From the drive system 8 is substantially the gear system 10 is shown, which acts on the bolts 28, 30 and is guided by the guide members 12, 14. Other components of the drive system 8 (eg motor, brake, control electronics) are in Fig. 7 not shown. From the drive system 8, a contact element 36 is also shown, which is on the side of the gear system 10 in contact with the conductor track 18. The contact element 36 is resiliently mounted in one embodiment and presses against the conductor 18 in order to compensate for any unevenness of the conductor 18 and thus to remain constantly in contact with the conductor 18. In another embodiment, the transmission of the electrical energy can be done in another way, for example by induction. But it is also possible to transfer the electrical energy only to the allow vertical parts of the guide system 4, but not on the horizontal parts. During a horizontal journey, the power supply can be provided, for example, by an in Fig. 10 shown energy storage 61 done.
- the gear system 10 consists in the embodiment shown of a pair of gear wheels 10a, 10b and a guide plate 34 which is disposed between the gear wheels 10a, 10b.
- the gear wheels 10a, 10b and the guide disk 34 are arranged on a common axis 35.
- the gear disk 10a is an inner gear disk
- the gear disk 10b is an outer gear disk.
- Each gear wheel 10a, 10b has a predetermined number of teeth spaced apart by gaps, and a diameter of about 300 mm to about 500 mm, for example about 400 mm.
- the dimensioning of a gear and the parameters to be used are known in the art.
- the parameters include, for example, tooth pitch (distance between two adjacent teeth), number of teeth, module as a measure of the size of the teeth (quotient of gear pitch and ⁇ ), pitch circle (pitch circle), pitch diameter and outside diameter.
- the gear wheels 10a, 10b are in the embodiment shown against each other rotated by half a tooth pitch on the axis 35, as in Fig. 8 and Fig. 10 seen. As stated above, the gear wheels 10a, 10b may be arranged without such dislocation.
- the toothed wheels 10a, 10b are in one embodiment made of high-strength plastic (for example polyamide, preferably made of polyamide 6 (PA 6)). This prevents, among other things, that metal rubs on metal, which causes abrasion and noise.
- the gear wheels 10a, 10b are made entirely of highly resilient plastic (PA6).
- PA6 highly resilient plastic
- a toothed disc 9 made of high-strength material, such as steel, be attached, for example by screwing.
- These discs 9 have a high strength and serve to catch the car 2 if - despite dimensioning with a safety factor - for example, a plastic tooth should break out. In such a case, the teeth of a disc 9 engage the rack system.
- the guide plate 34 is circular (see Fig. 10 ) and has a diameter of, for example, about 200 mm to about 400 mm, for example about 280 mm. Depending on the application, the guide plate 34 may also have a different diameter.
- the guide plate 34 has along its circumference a guide groove 34a. In Fig. 7 It is shown that the guide edges 12a, 14a engage in the guide groove 34a.
- the guide groove 34a has, for example, a depth of about 10 mm to about 50 mm, for example about 25 mm. Depending on the application, this depth, the guide groove 34a also have a different depth.
- the information provider 31 and the reader 37 are also visible.
- the reader 37 is attached to the car 2 and drives with this.
- the reader 37 is attached to the car 2 so that it can read information from the information provider 31 while driving.
- the reading device 37 can be fastened, for example, in the region of the cabin roof or on the drive unit 8. The information read by the reader 37 is then available to control the car 2.
- the reader 37 is an RFID reader with an antenna that reads information stored on RFID tags.
- RFID tags are commercially available, for example from microsensys GmbH, Germany. Such RFID tags may be described with desired information and have an adhesive side that allows the tags to be affixed at desired locations along the guide angle 32.
- RFID technology including storing information on RFID tags and designing them and reading the stored information, is well known; a detailed description of this technology is therefore not required here.
- the information provider 31 may also have a plurality of discrete optical codes (for example, bar codes or QR codes).
- Each of these optical codes encodes, for example, an identification number linked in a database with information (for example, position of the code or speed at the position of the code).
- Reader 37 a barcode or QR code reader.
- the technology relating to such optical codes, including generating the codes, reading the codes and associating a read code with stored information, is well known; a detailed description of this technology is therefore not required here.
- the system formed by reader 37 and information provider 31 is a redundant system. That is, the reader 37 and the information provider 31 are multiple times available for security reasons, for example, twice. Thus, in this embodiment, two readers 37 and two information transmitters 31 are provided; Each reader 37 reads its associated information provider 31. If the information provider 31 includes a plurality of RFID tags, each position is associated with two RFID tags. If the information transmitter 31 is designed as a band, two bands are present, which are arranged, for example, parallel to each other and read by two readers.
- the two readers 37 can be arranged offset by half the RFID tag distance in one embodiment. This ensures that always at least one of the two readers 37 has an RFID tag in the reading area. It can also be provided to attach two rows of RFID tags, for example at the guide angle 32, one row at the back, the other at the front. The corresponding readers 37 are therefore once at the front and once at the rear of the car 2.
- RFID tags information transmitters 31
- Fig. 8 shows a schematic illustration of the (rear) drive system 8 from Fig. 4 which engages the rack system of the track part 4b 1. It is visible, for example, how the teeth of the toothed wheel disk 10a engage in the spaces between the bolts 30. The teeth of the gear wheel 10b engage in an analogous manner in the spaces between the bolts 28 a. The leading edges 12a, 14a engage into the guide groove 34a. In Fig. 8 is also visible that the gear wheels 10a, 10b are rotated against each other, ie the teeth of a gear wheel 10a, 10b are the (tooth) spaces of the other gear wheel 10a, 10b opposite. In one embodiment, the rotation is about 14 °.
- the gear wheels 10a, 10b rotate about the axis 35, their teeth engage alternately in the interstices and exert forces on the bolts 28, 30 from.
- the car 2 moves on the vertical track parts up or down and on the horizontal track parts, based on Fig. 1 , left or right.
- a smooth running of the gear wheels 10, 10 along the bolts 28, 30 is achieved.
- the individual teeth are less heavily loaded and the noise is therefore smaller.
- Fig. 9 and Fig. 10 show an embodiment of the drive unit 8, wherein Fig. 9 a side view shows and Fig. 10 a perspective view.
- the drive unit 8 has a support frame 78 and damping elements 76 which are fixed to the support frame 78.
- the damping elements 76 are located between the car 2 and the support frame 78 of the drive unit 8.
- the damping elements 76 dampen the transmission of vibrations from the drive unit 8 to the car 2, so that passengers are exposed to less noise, for example.
- the damping elements 76 may be passive elements, for example, made of elastic material, such as rubber, or metallic spring elements. In addition, they can be configured as active elements in conjunction with a control electronics, for. B. based on one or more piezo elements.
- the dimensioning of the damping elements 76 for example with respect to the desired attenuation and the expected frequency range, corresponds to the professional action.
- the support frame 78 carries the drive unit 8; Some components of the drive unit 8 are therefore attached to the support frame 78.
- the support frame 78 has an L-shaped cross section with a long leg and a short leg.
- bearings 68, 74 are fixed, for example, which protrude substantially at right angles from the long leg.
- the bearing 74 is in one embodiment a fixed bearing (74) which stops all translational movements of a stored body and which is arranged in a fixed bearing support 74a.
- the bearing 68 is a floating bearing (68), which prevents a radial translational movement, the other but permits.
- the floating bearing 68 is arranged in a floating bearing support 68a.
- the axle 35 is mounted in the bearings 68, 74.
- a gear 64 is fixed, for example by means of one or more screw.
- the gear 64 is connected to a unit consisting of an electric motor 60 and an encoder 62.
- a unit and the gear 64 are available, for example, from Maxon (Switzerland).
- an output shaft of the transmission 64 is connected to a coupling 66 which is connected to the bearing 35 in the floating bearing axis 35.
- the coupling 66 is a metal bellows coupling (also called a corrugated pipe coupling).
- a connection element allows the torsionally rigid, but slightly offset in axial and angular connection of two shafts (for example, gear shaft and axis 35).
- a sliding contact 70 is provided, which rotates with the axis 35 and which is electrically conductively connected to the contact element 36.
- the electrical energy can be tapped off at this sliding contact 70 and sent to the control unit (see control unit 90 in FIG Fig. 18 ) are supplied to the cabin 2.
- the motor 60 is connected to this control unit and is driven by this.
- the brake 72 is an electro-mechanical spring-applied brake.
- a spring-applied brake for example, has a brake disk with two friction surfaces. In de-energized state, a braking torque is generated by frictional engagement by a plurality of compression springs. The brake is released electromagnetically. For airing The brake of a solenoid part is energized with DC voltage. The resulting magnetic force pulls an armature disc against the spring force to the magnetic part. The brake disc, which is coupled to the axle 35, is thus relieved of the spring force and can rotate freely.
- the brake 72 serves as a safety brake to prevent uncontrolled downward movement of the car 2.
- the brake 72 exerts a direct force effect on the gear system 10 from.
- the brake 72 is controlled by a safety unit, which detects, for example, an overspeed and triggers a braking.
- the safety brake is designed "fail-safe", i. the brake 72 is active as long as it is not explicitly deactivated.
- the safety unit deactivates the brake 72 electronically.
- the availability of the brake 72 is also increased by redundancy, since there are two brakes 72 per car 2.
- a separate safety gear may be provided on the car 2.
- Safety gears are known for example from traction lifts and can be triggered electronically or mechanically.
- An overspeed can be triggered for example electronically by means of a sensor or mechanically by means of a centrifugal governor.
- the safety gear is arranged so that it acts on the guide system 4.
- Fig. 10 also shows an electrical energy storage 61, which is arranged on the car 2, for example on the car roof, and is coupled to electrical devices of the car 2, including cabin lighting, alarm and emergency call devices and the drive unit 8.
- the energy store 61 contains, for example, one or more batteries, accumulators, supercapacitors or a combination of such energy stores.
- the energy storage 61 is rechargeable in one embodiment, for example, via the conductor 18 by the power supply of the elevator system 1 or, if the motor 60 can also be operated as a generator, by the motor 60, for example during braking or a descent. In the latter case, possibly excess energy can be fed via the conductor track 18 in the power supply.
- the energy storage device 61 which is present locally on the cabin 2 in the intermediate circuit serves to maintain functions of the car 2 with the stored energy, at least for a fixed period of time, in the event of a possible failure of the energy supply. This allows the car 2, for example, to approach the next floor, possibly at a reduced speed, on which passengers can then get off. During the approach to this floor, the cabin 2 remains lit for the safety of the passengers, although possibly only with emergency lighting.
- the energy storage 61 also provides energy for the emergency call device and the electromechanical brake 72. This ensures even in the event of a power failure that the car 2 is under all circumstances controlled movable and safely comes to a stop.
- FIGS. 11-15 a further embodiment of a guide system 4 is shown.
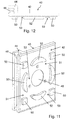
- Fig. 11 is a schematic illustration of an embodiment of a guide shoe 40 for this guide system, and
- Fig. 12 The guide shoe 40 has a rectangular front plate 42 with a front side and a rear side, with the rear side facing the drive unit 8 and the front side facing the gear system 10.
- a side part 44 of the guide shoe 40 points from the rear side of the front plate 42 also in the direction of the drive unit 8.
- the side part 44 has a guide groove 46th
- the guide shoe 40 has parts 50, 52 which are arranged within an imaginary rectangle (or square) within the rectangular front plate 42, for example.
- the (four) parts 50 are arranged in the region of the corners of the imaginary rectangle and the (four) parts 52 in the region of the side lines of this rectangle, in each case between the parts 50.
- the parts 50 have a cuboid structure and the parts 52 has a ring-segment-shaped structure ,
- By this arrangement of the parts 50, 52 results in a plane parallel to the plane of the front tracks 51, 53; two travel paths 51 extend perpendicular to the guide groove 46, and two travel paths 53 extend parallel to the guide groove 46.
- the guide groove 46 and the tracks 53 extend perpendicular to the plane of the drawing.
- guide profile 56 in one of these routes 51, 53, while the guide shoe 40, among other things guided by the parts 50, 52 along the guide profile 56 moves, as well as in Fig. 15 shown.
- the guide shoe 40 also has an opening 48 for receiving the axle 35 of the drive unit 8.
- the guide shoe 40 is fixed to the fixed bearing support 74a, as in Fig. 16 shown.
- the guide shoe 40 is made of high-strength material, such as plastic, in particular PA 6.
- the guide shoe 40 is made of a plastic part of appropriate size, which by a machining process, for. B. milling, has been processed.
- Fig. 13 shows a cross section of a schematically illustrated embodiment of the second guide system 4.
- Fig. 5 shows Fig. 13 a cross section through the second guide system 4, whose basic structure is equal to the in Fig. 5 shown embodiment.
- a V-shaped guide angle 32 has in Fig. 13 embodiment shown a U-shaped guide bracket 54 which engages in operation in the guide groove 46 of the guide shoe 40.
- the guide bracket 54 is also attached to the guide member 12.
- the already mentioned guide profile 56 extends in Fig. 13 over the ends of the bolts 30 and is fixed to the bolt 30.
- the guide profile 56 is bolted to the bolt 30.
- the guide profile 56 may be welded or soldered to the bolts 30.
- Fig. 14 shows a schematically illustrated embodiment of a portion of a lower portion of the second guide system 4. Similarly as Fig. 3 shows Fig. 14 a schematic embodiment of a horizontal track portion 4a3 of the second guide system.
- the basic structure is the same as in Fig. 3 shown embodiment. At this point, therefore, again only the differences are discussed.
- a horizontal part of the track from the upper part of the elevator system is designed accordingly; this also applies to corresponding rear track parts.
- the guide system 4 comprises the guide angle 54, a vertical guide profile 56 and a horizontal guide profile 56.
- the guide profiles 56 are spaced from each other.
- the guide rail 54 extends beyond the guide member 12, whereby the guidance of the car 2 (not the drive unit 8) by means of the guide member 12 is made possible.
- Fig. 15 shows a perspective view of an illustration of the guide shoe 40 with a guide profile 56 arranged thereon and a gear system 10 of the drive unit 8.
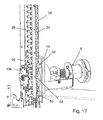
- Fig. 17 shows a perspective view of a schematic illustration of a drive unit 8 in interaction with the bolts 28, 30, wherein the guide is exemplified by the guide shoe 40.
- the guide profile 56 extends in the guideway 53 of the guide shoe 40, wherein the guide profile 56 is located between the front plate 42 and the gear system 10.
- the guide profile 56 touches on one side, the parts 50, 52 and is performed during operation by this within the guideway 53.
- the guide shoe 40 is used, inter alia, for receiving torques; for the guide shoe 40 is attached to the fixed bearing support 74a.
- a torque is a physical quantity; If a force acts at right angles to a lever arm, the amount of torque results from the length of the lever arm multiplied by the amount of force.
- the lever arm here is the distance from the meshing on the gear 10a, 10b to the axis 35, and the force is the sum of the force generated by the drive unit 8 and weight of the car 2 plus load in the car 2.
- the torques are with the from guide angles 54, guide groove 46 and parts 50 formed guide received directly where they arise, namely the engagement of the gear 10a, 10b in the rack system (bolts 28, 30).
- the guide angle 54 is also in the guide groove 46, whereby a sliding guide of the guide shoe 40 along the guide system 4 is achieved.
- the combination of guide angle 54 and guide groove 46 can also be omitted. It is also possible to replace the slide by means of guide groove 46 and guide angle 54 by a (run) roller guide. It usually roll several roles or wheels of a running body (here: cabin 2) along a guide rail.
- Fig. 16 is a schematic illustration of a plan view of the drive unit 8 in Interaction with the second guidance system. From the drive system 8, the gear system 10 is again substantially shown, which acts on the bolts 28, 30 and is guided by the guide members 12, 14. Other components of the drive system 8 (eg motor, brake) are in Fig. 16 not shown.
- the gear system 10 is as above in connection with Fig. 4 described designed and works as described there.
- the guide shoe 40 is disposed between the gear disk 10 a and the brake 72.
- Fig. 16 also shows that the guide angle 54 engages in the guide groove 46 of the guide shoe 40 and the guide profile 56 abuts the part 50 of the guide shoe 40.
- the guide profile 56 is also at the part 52 and another part 50 at. It can be seen that the (or each) drive unit 8, and thus also the car 2, are guided within narrow limits along the guide system 4: the guide edges 12a, 14a engage in the guide groove 34a of the guide plate 34, the guide angle 54 engages in the guide groove 46 and the guide profile 56 guides the parts 50, 52 of the guide shoe 40th
- each drive unit 8 can also be arranged below the car 2.
- Elevator system 1 described in various embodiments can be operated in various ways.
- Each car 2 has its own drive, for example, two drive units 8, whereby it is independent of other cabins 2 independently movable.
- this mobility is subject to limits, since a collision with an adjacent car 2 must be avoided.
- Fig. 18 various aspects for controlling the cabins 2 are described.
- Fig. 18 shows a schematic illustration of the elevator system with a central Control unit (ECS) 82 and a number of floor terminals 80.
- the floor terminals 80 may be arranged on different floors.
- a communication network 84 connects the floor terminals 80 to the control unit 82.
- each car 2 has a control unit (CTRL) 90 and a system monitor (SSU) 92.
- a communication network 86 connects the control units 90 of the cabins 2 to the control unit 82, and a communication network 88 interconnects the system monitors 92 of the cabins 2.
- CTRL control unit
- SSU system monitor
- the communication networks 84, 86, 88 are in Fig. 18 shown as separate communication networks. However, the person skilled in the art recognizes that these communication networks 84, 86, 88 can also be combined in a common communication network, so that the communication takes place via a communication network.
- the individual floor terminals 80, control units 90, system monitoring devices 92 are connected to this common communication network and can communicate, for example, with the central control unit 82.
- the communication networks 84, 86, 88 and the common communication network are implemented as radio networks.
- suitable radio networks are known, for example a WLAN network or networks based on ZigBee or Bluetooth.
- a radio network has the advantage over a cable-based communication network that it can be installed relatively flexibly without great effort. This is especially an advantage if communication units, for example, as here, the cabins 2 can move in an elevator system.
- the floor terminals 80 are permanently installed, so that communication between the central control unit 82 and the floor terminals 80 can also be provided via a wired communication network.
- Such a communication network may be implemented in a bus structure.
- Each floor terminal 80 has an input device for inputting to a person to allow a travel request.
- the person on the floor enters the desired destination floor, that is, a destination call is generated to which a start floor and a destination floor are assigned.
- the input device can be configured differently for this purpose, for example with a keyboard, a touchscreen and / or a reading device for an optical code (eg barcode or QR code) or for communication with an RFID transponder on a carrier material (for example in the form of FIG a credit card).
- the destination call generated in this way is transmitted to the central control unit 82, which evaluates it.
- an allocation algorithm known from destination call controls is used in one embodiment.
- Such an allocation algorithm is known, for example WO0172621A1 ,
- the allocation algorithm assigns to the destination call (ie an order) the car 2 which best fulfills the criteria set for this destination call, for example with regard to waiting time and travel time.
- the person skilled in the art recognizes that the assignment of the orders to the booths 2 does not necessarily take place at the time of the input of a destination call by the passenger, but at most only later, for example shortly before the execution of the order.
- an allocation to a car 2 can also be revised or canceled.
- the central control unit 82 notifies the floor terminal 80 of the assigned car 2.
- the floor terminal 80 displays the allocated car 2, for example, on a display.
- the allocated car 2 may be displayed on a floor display.
- the floor display can indicate, for example, the destination floor, the assigned car 2 and the expected arrival time of the allocated car 2 on the start floor. This has the advantage that the person knows when "their" cabin 2 arrives. If several people leave this starting floor, it may happen that the people are uncertain in which cabin 2 they have to board to get to their desired destination floor. To avoid this possibly existing uncertainty, the floor display can indicate for each boarding cabin 2, which or which destination storeys are served by this cabin 2. In one embodiment, this may be done alternatively or additionally with a loudspeaker message.
- the central control unit 82 also controls the selected car 2.
- a control command used for this purpose contains, for example, information about the direction of travel (up / down) and / or start / destination floor (from / to). From there, the car 2 executes the control command essentially autonomously.
- the drive unit 8 of the car 2 responds to the control command, for example, with the release of the brake 72 and an activation of the motor 60, which then rotates the shaft 35 according to a fixed drive profile.
- the drive profile defines, for example, the direction of rotation of the axis 35, the acceleration and the target speed.
- the starting acceleration and the target speed may be related to the axis 35 (eg, rotational speed of the axle 35) or the car 2.
- the car 2 determines its position while driving by means of the information transmitter 31 or the information transmitter 31. If the information transmitter 31 contains further information (eg maximum speed) in addition to the position, the control unit 90 and the system monitoring device 92 also process the car 2 this information.
- the system monitor 92 communicates status parameters of the car 2, such as position, distance to an adjacent car 2, direction of travel and speed, via the communication network 88 to other cars 2 (or their system monitors 92) and to the central control unit 82.
- a car communicates 2 only with directly adjacent cabins 2; in Fig. 18 Cabin # 7 only communicates with cabins # 6 and # 8. As a result, each car 2 is informed about the status parameters of its neighboring cars 2.
- the cabins 2 can thus, for example, comply with defined safety distances and / or adjust their speeds. From a passenger's point of view, it may be desirable to avoid, for example, anxiety or panic when there is no hold outside a hold floor during a ride without the door opening.
- the cars 2 may be equipped with display units that display the status, position information, and / or other trip information to the passengers. It can also be provided cabin doors, the whole or partially transparent so that passengers can for example know when the car 2 is on a floor and when not.
- the drive unit 8 reduces the rotational speed of the axle 35, so that the gear system 10 rotates more slowly and the car 2 is braked to a stop on the destination floor.
- the deceleration of the car 2 takes place by reducing the rotation of the gear system 10, to which the rack system acts. Stands the car 2, the brake 72 is activated in one embodiment.
- each car 2 (or its control unit 90 and / or system monitoring device 92) carries out analyzes and calculations continuously (especially during the execution of a control command, but also before that). For example, the car 2 continuously calculates, based on its own status parameters, a braking distance that would be required at the time of calculation to come to a standstill.
- various actions are defined, for example an acceleration of the car 2 to a certain speed. Based on these actions, the car 2 calculates a projected situation at the next time. For this purpose, status parameters of the leading or trailing cabin are evaluated and a guaranteed free distance for the car 2 is determined; this corresponds to a "worst case". If, at the next time, the free distance is greater than the braking distance, the planned action can be carried out. However, if the free distance is smaller than the braking distance at the next point in time, braking is initiated or the approach is prevented.
- At least one of the control methods described herein may be performed by a computer or computer based device that performs or causes one or more method steps.
- the computer or computer assisted device includes reading instructions for performing the method steps of one or more computer readable storage media.
- These storage media may include volatile memory components (eg, DRAM or SRAM), nonvolatile memory components (eg, hard disks, optical disks, flash RAM, or ROM), or a combination thereof.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Types And Forms Of Lifts (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14187115.2A EP3002243A1 (fr) | 2014-09-30 | 2014-09-30 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
| EP15771109.4A EP3201114B1 (fr) | 2014-09-30 | 2015-09-29 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
| AU2015326986A AU2015326986B2 (en) | 2014-09-30 | 2015-09-29 | Lift system having individually driven cars and a closed track |
| US15/515,912 US10486941B2 (en) | 2014-09-30 | 2015-09-29 | Lift system having individually driven cars and a closed track |
| CA2958341A CA2958341C (fr) | 2014-09-30 | 2015-09-29 | Systeme d'ascenseur a cabines entrainees individuellement et suivant une trajectoire fermee |
| MX2017004047A MX2017004047A (es) | 2014-09-30 | 2015-09-29 | Sistema de elevador teniendo cabinas con propulsion individual y carril cerrado. |
| CN201580052795.3A CN106715306B (zh) | 2014-09-30 | 2015-09-29 | 具有被分别驱动的轿厢和闭合的行驶轨道的电梯系统 |
| PCT/EP2015/072483 WO2016050803A1 (fr) | 2014-09-30 | 2015-09-29 | Système d'ascenseur à cabines entraînées individuellement et suivant une trajectoire fermée |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14187115.2A EP3002243A1 (fr) | 2014-09-30 | 2014-09-30 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3002243A1 true EP3002243A1 (fr) | 2016-04-06 |
Family
ID=51626448
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14187115.2A Withdrawn EP3002243A1 (fr) | 2014-09-30 | 2014-09-30 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
| EP15771109.4A Active EP3201114B1 (fr) | 2014-09-30 | 2015-09-29 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15771109.4A Active EP3201114B1 (fr) | 2014-09-30 | 2015-09-29 | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10486941B2 (fr) |
| EP (2) | EP3002243A1 (fr) |
| CN (1) | CN106715306B (fr) |
| AU (1) | AU2015326986B2 (fr) |
| CA (1) | CA2958341C (fr) |
| MX (1) | MX2017004047A (fr) |
| WO (1) | WO2016050803A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019200665A1 (de) * | 2019-01-21 | 2020-07-23 | Thyssenkrupp Ag | Aufzugsanlage |
| DE102019200669A1 (de) * | 2019-01-21 | 2020-07-23 | Thyssenkrupp Ag | Aufzugsanlage |
| DE102019201376A1 (de) * | 2019-02-04 | 2020-08-06 | Thyssenkrupp Ag | Aufzugsanlage |
| WO2020151952A3 (fr) * | 2019-01-21 | 2020-11-05 | Thyssenkrupp Elevator Innovation And Operations Ag | Système d'ascenseur |
| WO2021008754A1 (fr) * | 2019-07-17 | 2021-01-21 | Thyssenkrupp Elevator Innovation And Operations Ag | Système d'ascenseur |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107108150B (zh) * | 2014-12-17 | 2020-04-21 | 奥的斯电梯公司 | 可配置多轿厢电梯系统 |
| DE102015218025B4 (de) * | 2015-09-18 | 2019-12-12 | Thyssenkrupp Ag | Aufzugsystem |
| JP2020518535A (ja) * | 2017-05-04 | 2020-06-25 | デイレル、イヴァン | 自律移動リフト関連出願への相互参照 該当なし連邦政府による資金提供を受けた研究 該当なしシーケンスリストまたはプログラム 該当なし |
| EP3409631B1 (fr) * | 2017-06-01 | 2021-04-28 | KONE Corporation | Agencement et procédé pour changer une direction de déplacement d'une cabine d'ascenseur et ascenseur correspondant |
| CN107215741A (zh) * | 2017-06-12 | 2017-09-29 | 河南理工大学 | 一种直线电机直驱电梯超速保护及工作制动装置 |
| ES2695626B2 (es) * | 2017-06-30 | 2020-05-19 | Hws Concrete Towers S L | Dispositivo auto-trepante por superficies de hormigón verticales y cuasi-verticales y procedimiento de operación. |
| US11027944B2 (en) * | 2017-09-08 | 2021-06-08 | Otis Elevator Company | Climbing elevator transfer system and methods |
| CN109466995B (zh) | 2017-09-08 | 2020-11-27 | 奥的斯电梯公司 | 简单支撑的再循环电梯系统 |
| DE102017219885A1 (de) * | 2017-11-08 | 2019-05-09 | Thyssenkrupp Ag | Verfahren zum Dämpfen einer Auslenkung einer Aufzugskabine bei horizontalen Beschleunigungen |
| CN107879220A (zh) * | 2017-12-13 | 2018-04-06 | 林子涵 | 一种具有多动力磁悬浮电梯的导向结构 |
| CN110921461B (zh) * | 2019-12-02 | 2023-10-27 | 厦门康柏机械集团有限公司 | 一种安全稳定型小型吊笼 |
| WO2021125519A1 (fr) * | 2019-12-17 | 2021-06-24 | 현대무벡스 주식회사 | Système de transporteur vertical à circulation pour robots |
| US20220073316A1 (en) | 2020-07-15 | 2022-03-10 | Leandre Adifon | Systems and methods for operation of elevators and other devices |
| US11319186B2 (en) | 2020-07-15 | 2022-05-03 | Leandre Adifon | Systems and methods for operation of elevators and other devices |
| US11305964B2 (en) | 2020-07-15 | 2022-04-19 | Leandre Adifon | Systems and methods for operation of elevators and other devices |
| CN113526298B (zh) * | 2021-07-15 | 2023-03-28 | 中国建筑第八工程局有限公司 | 建筑楼用的运输车及其施工方法 |
| DE102022129467A1 (de) | 2022-11-08 | 2023-12-28 | Tk Elevator Innovation And Operations Gmbh | Aufzugsanlage |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3658155A (en) * | 1970-09-15 | 1972-04-25 | William G Salter | Elevator system |
| JPH05139659A (ja) * | 1991-11-22 | 1993-06-08 | Kajima Corp | ギヤ駆動エレベータ |
| JP2004269193A (ja) | 2003-03-11 | 2004-09-30 | Hitachi Ltd | エレベーター装置 |
| WO2009072138A1 (fr) | 2007-12-06 | 2009-06-11 | Ramesh Kumar Chhabria | Nouveau mécanisme pour ascenseurs |
| WO2009125253A1 (fr) * | 2008-04-07 | 2009-10-15 | Ridas Matonis | Moyens et système de transport |
| JP2011006227A (ja) * | 2009-06-27 | 2011-01-13 | Norimasa Ozaki | エレベータ装置 |
| WO2012038760A2 (fr) * | 2010-09-24 | 2012-03-29 | Adrian Michael Godwin | Système de transport |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US561223A (en) * | 1896-06-02 | hamilton | ||
| US2612238A (en) * | 1949-12-31 | 1952-09-30 | Achilles F Angelicola | Elevator system |
| GB685263A (en) * | 1950-09-23 | 1952-12-31 | Max Moerck | Improvements in lifts of the paternoster type |
| AT278287B (de) * | 1965-12-13 | 1970-01-26 | Lets Aufzug Etablissement | Aufzug mit Schraubenantrieb |
| US3420116A (en) * | 1968-03-01 | 1969-01-07 | Frederick W Seybold | Transmission gearing for elevators |
| KR890003878B1 (ko) * | 1985-09-05 | 1989-10-10 | 미쓰비시덴끼 가부시끼가이샤 | 엘레베이터장치 |
| JP2529771B2 (ja) * | 1990-11-06 | 1996-09-04 | 三菱電機株式会社 | ロ―プレスリニアモ―タエレベ―タ― |
| JP2826473B2 (ja) * | 1994-11-22 | 1998-11-18 | リョウ ダビッド | 自走式非常梯子 |
| EP0745553A1 (fr) * | 1995-06-02 | 1996-12-04 | Inventio Ag | Unité d'entrainement pour un ascenseur |
| JPH1179570A (ja) * | 1997-09-03 | 1999-03-23 | Techman Kogyo Kk | 荷物用のエレベーター |
| ES2189396T3 (es) * | 1998-02-01 | 2003-07-01 | Emil Schmid | Procedimiento y dispositivo para el transporte de personas y/o mercancias a lo largo de un trayecto que presenta secciones verticales y arqueadas. |
| TW555681B (en) * | 2001-07-31 | 2003-10-01 | Inventio Ag | Lift installation with equipment for ascertaining the cage position |
| US20040154870A1 (en) * | 2003-01-28 | 2004-08-12 | Patrick Bass | Self-climbing elevator machine comprising a punched rail assembly |
| CN1868849A (zh) * | 2006-06-13 | 2006-11-29 | 孔令中 | 多轿厢电梯实现方法 |
| CN100579887C (zh) * | 2006-12-29 | 2010-01-13 | 上海三菱电梯有限公司 | 直线扶手驱动装置 |
| CN201037088Y (zh) * | 2007-01-05 | 2008-03-19 | 宣建民 | 节能、安全型电梯 |
| CN201223650Y (zh) * | 2008-05-23 | 2009-04-22 | 吴旭榕 | 一种楼房升降装置 |
| CN101875465B (zh) * | 2009-04-28 | 2012-03-28 | 河南理工大学 | 一种无绳循环多轿厢电梯及其循环系统 |
| US8863908B2 (en) * | 2010-09-09 | 2014-10-21 | Inventio Ag | Controlling a drive motor of an elevator installation |
| AU2012100022A4 (en) * | 2012-01-10 | 2012-02-23 | Weal Tree Electrical Co., Ltd. | Track Conveyor |
| CN202542620U (zh) * | 2012-03-21 | 2012-11-21 | 希姆斯电梯(中国)有限公司 | 助力梯过速保护机构 |
| CN202971782U (zh) * | 2012-12-10 | 2013-06-05 | 中联重科股份有限公司 | 齿轮齿条啮合机构、升降机构和起重机械 |
| ITTV20130057A1 (it) * | 2013-04-23 | 2014-10-24 | Tarcisio Scomparin | "sistema elevatore e traslatore con struttura a portale che impiega cremagliere e piu' vie di corsa verticali ed orizzontali di almeno una cabina di trasporto di persone e cose per il superamento di ostacoli sopraelevato e non." |
-
2014
- 2014-09-30 EP EP14187115.2A patent/EP3002243A1/fr not_active Withdrawn
-
2015
- 2015-09-29 MX MX2017004047A patent/MX2017004047A/es unknown
- 2015-09-29 CN CN201580052795.3A patent/CN106715306B/zh active Active
- 2015-09-29 US US15/515,912 patent/US10486941B2/en active Active
- 2015-09-29 WO PCT/EP2015/072483 patent/WO2016050803A1/fr active Application Filing
- 2015-09-29 EP EP15771109.4A patent/EP3201114B1/fr active Active
- 2015-09-29 AU AU2015326986A patent/AU2015326986B2/en not_active Ceased
- 2015-09-29 CA CA2958341A patent/CA2958341C/fr active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3658155A (en) * | 1970-09-15 | 1972-04-25 | William G Salter | Elevator system |
| JPH05139659A (ja) * | 1991-11-22 | 1993-06-08 | Kajima Corp | ギヤ駆動エレベータ |
| JP2004269193A (ja) | 2003-03-11 | 2004-09-30 | Hitachi Ltd | エレベーター装置 |
| WO2009072138A1 (fr) | 2007-12-06 | 2009-06-11 | Ramesh Kumar Chhabria | Nouveau mécanisme pour ascenseurs |
| WO2009125253A1 (fr) * | 2008-04-07 | 2009-10-15 | Ridas Matonis | Moyens et système de transport |
| JP2011006227A (ja) * | 2009-06-27 | 2011-01-13 | Norimasa Ozaki | エレベータ装置 |
| WO2012038760A2 (fr) * | 2010-09-24 | 2012-03-29 | Adrian Michael Godwin | Système de transport |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019200665A1 (de) * | 2019-01-21 | 2020-07-23 | Thyssenkrupp Ag | Aufzugsanlage |
| DE102019200669A1 (de) * | 2019-01-21 | 2020-07-23 | Thyssenkrupp Ag | Aufzugsanlage |
| WO2020151952A3 (fr) * | 2019-01-21 | 2020-11-05 | Thyssenkrupp Elevator Innovation And Operations Ag | Système d'ascenseur |
| DE102019201376A1 (de) * | 2019-02-04 | 2020-08-06 | Thyssenkrupp Ag | Aufzugsanlage |
| WO2021008754A1 (fr) * | 2019-07-17 | 2021-01-21 | Thyssenkrupp Elevator Innovation And Operations Ag | Système d'ascenseur |
Also Published As
| Publication number | Publication date |
|---|---|
| US10486941B2 (en) | 2019-11-26 |
| US20170305718A1 (en) | 2017-10-26 |
| CN106715306B (zh) | 2020-03-10 |
| MX2017004047A (es) | 2017-06-19 |
| EP3201114A1 (fr) | 2017-08-09 |
| CA2958341C (fr) | 2022-10-25 |
| CA2958341A1 (fr) | 2016-04-07 |
| CN106715306A (zh) | 2017-05-24 |
| AU2015326986A1 (en) | 2017-04-13 |
| WO2016050803A1 (fr) | 2016-04-07 |
| AU2015326986B2 (en) | 2019-02-07 |
| EP3201114B1 (fr) | 2018-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3201114B1 (fr) | Système d'élévation équipé de cabines entraînées individuellement et voie de circulation fermée | |
| EP2651809B1 (fr) | Actionnement d'un parachute | |
| EP2219985B1 (fr) | Système d'ascenseur avec cabines d'ascenseur mobiles dans les sens vertical et horizontal | |
| DE102014220966A1 (de) | Verfahren zum Betreiben einer Transportanlage sowie entsprechende Transportanlage | |
| EP3599208A1 (fr) | Installation d'ascenseur comprenant une pluralité de cabines d'ascenseur ainsi qu'un système de sécurité décentralisé | |
| EP1371596A1 (fr) | Dispositif de sécurité pour groupe d'ascenseurs | |
| WO2005115906A2 (fr) | Ascenseur a entrainement individuel | |
| EP2855327B1 (fr) | Unité d'amortissement pour ascenseur | |
| EP2170753A1 (fr) | Installation d'ascenseur comprenant une cabine d'ascenseur, un dispositif de freinage pour immobiliser une cabine d'ascenseur dans un mode de fonctionnement special et procede pour immobiliser une cabine d'ascenseur dans un mode de fonctionnement special | |
| DE102017205354A1 (de) | Mehrkabinenaufzuganlage sowie Verfahren zum Betreiben einer Mehrkabinenaufzuganlage | |
| WO2011098508A1 (fr) | Installation d'ascenseur et procédé pour faire fonctionner une telle installation d'ascenseur | |
| EP1367018B1 (fr) | Ascenseur comprenant plusiers cabines auto-motrice et au moins trois gaines d'ascenseur disposé côte à côte | |
| DE102016210030A1 (de) | Schienentransportsystem und Schienenfahrzeug für ein Schienentransportsystem | |
| WO2006114392A1 (fr) | Procede pour faire fonctionner un dispositif de commande destine a une porte, et dispositif de commande correspondant | |
| EP3002242A1 (fr) | Procédé de commande pour un système d'élévation à cabines entraînées individuellement et de voie de circulation fermée | |
| EP2855328B1 (fr) | Unité d'amortissement pour ascenseur | |
| DE102017202129A1 (de) | Aufzuganlage mit Drehsegmenten | |
| EP3750610B1 (fr) | Dispositif de transport d'au moins un passager | |
| EP1894876A1 (fr) | Dispositif d'élévation doté d'une cabine et d'un contrepoids et procédé destiné à la disposition d'une installation d'élévation | |
| DE102019000679A1 (de) | Aufzugsystem | |
| WO2014124838A1 (fr) | Amortissement de vibrations verticales d'une cabine d'une installation d'ascenseur | |
| WO1996003289A1 (fr) | Chassis flottant a suspension electromagnetique | |
| DE20206289U1 (de) | Liftmobil insbesondere für Gebäude | |
| EP4069619A1 (fr) | Appareil de guidage et de freinage d'un corps mobile d'un système de levage, ledit corps devant être déplacé le long d'une voie de guidage | |
| WO2019110742A1 (fr) | Système de freinage d'urgence, système de transport et installation de production et/ou logistique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20160418 |