EP2953876B1 - Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts - Google Patents
Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts Download PDFInfo
- Publication number
- EP2953876B1 EP2953876B1 EP13829060.6A EP13829060A EP2953876B1 EP 2953876 B1 EP2953876 B1 EP 2953876B1 EP 13829060 A EP13829060 A EP 13829060A EP 2953876 B1 EP2953876 B1 EP 2953876B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- winding
- laying
- winding drum
- laying arm
- carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004804 winding Methods 0.000 title claims description 430
- 239000000463 material Substances 0.000 title claims description 56
- 238000000034 method Methods 0.000 title claims description 25
- 230000033001 locomotion Effects 0.000 claims description 58
- 239000004033 plastic Substances 0.000 claims description 36
- 230000001105 regulatory effect Effects 0.000 claims description 15
- 238000005096 rolling process Methods 0.000 claims description 13
- 230000007935 neutral effect Effects 0.000 claims description 12
- 230000036316 preload Effects 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 3
- 230000000750 progressive effect Effects 0.000 claims 1
- 230000000284 resting effect Effects 0.000 claims 1
- 238000009434 installation Methods 0.000 description 24
- 238000006073 displacement reaction Methods 0.000 description 11
- 238000001125 extrusion Methods 0.000 description 9
- 238000013016 damping Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 239000003000 extruded plastic Substances 0.000 description 3
- 230000033228 biological regulation Effects 0.000 description 2
- 239000007853 buffer solution Substances 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000872 buffer Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010924 continuous production Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/02—Winding and traversing material on to reels, bobbins, tubes, or like package cores or formers
- B65H54/28—Traversing devices; Package-shaping arrangements
- B65H54/2848—Arrangements for aligned winding
- B65H54/2851—Arrangements for aligned winding by pressing the material being wound against the drum, flange or already wound material, e.g. by fingers or rollers; guides moved by the already wound material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/02—Winding and traversing material on to reels, bobbins, tubes, or like package cores or formers
- B65H54/28—Traversing devices; Package-shaping arrangements
- B65H54/2848—Arrangements for aligned winding
- B65H54/2854—Detection or control of aligned winding or reversal
- B65H54/2857—Reversal control
- B65H54/286—Reversal control by detection that the material has reached the flange or the reel end
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H59/00—Adjusting or controlling tension in filamentary material, e.g. for preventing snarling; Applications of tension indicators
- B65H59/10—Adjusting or controlling tension in filamentary material, e.g. for preventing snarling; Applications of tension indicators by devices acting on running material and not associated with supply or take-up devices
- B65H59/18—Driven rotary elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/33—Hollow or hose-like material
- B65H2701/331—Hollow or hose-like material leaving an extruder
Definitions
- the invention relates to a device for a method for winding a strand-like winding material in the form of a continuously extruded tube made of plastic onto a rotating winding drum.
- the winding material for example a protective cable tube in which a fiber optic cable can be laid in a protected manner
- the winding process immediately follows the manufacturing process, in particular the extrusion, of the winding material, so that the plastic winding material just extruded leaves a cooling station without being cut to length and is fed to the winding device.
- the winding process itself is then usually controlled by an operator and, if necessary, manipulated manually.
- a standard wooden winding drum When using a cable protection tube as winding material, a standard wooden winding drum is usually used.
- the cable protection pipe wound on the wooden winding drum is delivered to construction sites to be installed there as required.
- Such inexpensive, standardized wooden winding drums or other winding drums have proven themselves due to their relatively low price and the possible reusability, especially in use on construction sites.
- the winding drums have rotationally asymmetrical axial and radial strokes due to imbalances on the side flanges and on the drum core. Because of the geometric irregularity of the winding drum, according to the state of the art, the winding material must be wound up and monitored and manipulated by an operator.
- EP 0203046 B1 discloses, for example, a cable winder in which a guide arm which is directed towards the winding roll has a plurality of arm links which are connected to one another by means of a plurality of arm joint locations. It turned out, however, that with the known winding automation processes, ideal conditions exist for both the cable and the winding drum, in particular with regard to the geometry of the winding drum and the material properties of the material to be wound. Wire winders, in particular, are products of high material quality and uniform material properties, which is why higher costs are involved in using ideal-geometric, unbalance-free winding spools. It was found that the known automated winding techniques cannot be used successfully when a winding material and a winding drum are used whose material and / or geometric properties cannot be foreseen.
- U.S. 4,124,340 A discloses an apparatus according to the preamble of claim 1.
- a device for winding a strand-like winding material in the form of a continuously extruded tube made of plastic onto a winding drum.
- the winding device according to the invention comprises an adjusting robot and a carrier on which, for example, electronic components of the device can be arranged.
- the carrier can also only be designed to have an area of attack for fastening a gripping arm of an actuator or a handling device in the form of a robot.
- Carrier has a rail for a rail-slide arrangement.
- the winding device according to the invention has a laying arm mounted on the carrier, via the end of which the winding material is transferred to the rotating winding drum in an axial, in particular linear, back and forth movement of the laying arm.
- the axial back and forth movement is preferably purely translationally linear and aligned essentially parallel to the axis of rotation of the winding drum.
- the end on the winding drum side describes the axial, linear to and fro path between the two opposite side flanges of the winding drum.
- the laying arm Facing away from the winding drum, has a receptacle for receiving the wound material, in particular continuously leaving an extrusion station.
- the receptacle can be formed, for example, by a star-shaped arrangement of several, in particular four, free-running rollers.
- the receptacle can additionally have a support structure on which, for example, electronic components, but also pneumatic damping systems for mounting the installation arm, can be held.
- the winding device according to the invention also has a laying arm bearing that guides the laying arm relative to the carrier in a particularly axial laying direction.
- the winding device according to the invention has a restoring or pretensioning device which, in the event of a deflection of the laying arm caused in particular by the axial growth of the winding layer on the winding drum, in particular from a neutral position of the laying arm relative to the carrier, generates a particularly elastic, in particular, essentially axially directed restoring or pretensioning force notifies the laying arm in order to press the laying arm laterally against the winding loop that was last placed on the winding drum.
- the restoring device and the laying arm mounting pre-tension the laying arm in such a way that it is supported axially on the winding, in particular the most recently laid winding loop, in a pressing manner, in particular at its end on the winding drum side.
- no restoring force acts on the laying arm and thus on the most recently laid winding loop.
- the restoring force generated by the restoring device preferably acts continuously on the most recently laid winding loop during the entire process Back and forth movement of the laying arm.
- the restoring force and thus the constant axial pretensioning of the end of the laying arm on the winding drum side against the winding loop press the most recently laid winding loop axially against the immediately adjacent winding loop, creating a compact, gapless winding structure.
- the flexibility in the laying direction achieved by the laying arm mounting combined with the elastic restoring pretension against the laying direction allows a change in position of the laying arm, which is caused by the winding that gradually builds up on the winding drum.
- the laying arm does not carry out an actively defined, in particular regulated, setting procedure, but rather constantly adapts flexibly to geometric features and material-specific characteristics of the winding.
- a particularly functionally reliable automation of the winding can be achieved at high demand and winding speeds of up to 100 m / min and beyond.
- the laying arm can also be flexibly mounted in a vertical direction.
- the installation arm mounting can preferably allow a purely translatory adjustment of the carrier-side end of the installation arm and optionally a purely translational vertical movement of the carrier-side end of the installation arm.
- the laying arm could possibly execute a pivoting movement of the laying arm around the carrier-side end of the laying arm by means of a corresponding carrier-side laying arm pivot bearing, whereby both a pivoting movement in an axial plane and in a vertical plane can be permitted.
- This laying arm pivot bearing must allow a pivot amplitude of only a few degrees, in particular less than 20 °. The longer the longitudinal extension of the installation arm, the lower the swivel mounting amplitude needs to be designed in the vertical and horizontal directions.
- a winding drum-side end of the laying arm which can be designed, for example, as a free-running engagement wheel, is designed in such a way that the winding drum-side end due to the restoring force during the axial to-and-fro movement, in particular during the entire to-and-fro movement in one in particular there is constant lateral contact with an at least circumferentially free lateral side of the most recently laid winding loop, so that in particular the laying arm depends on the axial growth of the winding to be laid, that is, depending on the axial deflection is deflected from the neutral position, for example, gradually by the axial extent of a winding loop in the axial direction of installation.
- the resetting device generates a resetting pressure force which is communicated to the lateral side of the most recently laid winding loop via the end of the laying arm on the winding drum side.
- the restoring device comprises a spring system that can be controlled or adjusted in particular by the control and / or regulating device and that generates, in particular calculates and sets, an elastic restoring force when the placement arm is deflected from the neutral position into a deflected position.
- a controllable suspension can already generate a restoring force without the transfer arm being deflected from a neutral position.
- the restoring force is aligned in such a way that its effective direction is parallel to the axial laying direction, in particular parallel to the axis of rotation of the winding drum. So that the restoring device presses the end on the winding drum side against the most recently laid winding loop, the effective direction of the restoring force is opposite to that of the laying direction.
- the restoring force is preferably only used to bias the laying arm in the axial direction against the winding and to support it thereon.
- To reset the traversing arm relative to the carrier is preferably implemented by an actuator holding the carrier, such as a robot which, when a deflection threshold or a maximum reset / pretensioning force is exceeded, tracks the carrier relative to the deflected laying arm.
- the restoring device is formed by a pneumatic actuator, in particular by a pair of pneumatic actuators, of which one of the actuators is responsible for generating the restoring force in a respective axial displacement direction.
- the pneumatic actuator can be coupled to a control and / or regulating device in order to receive operational or winding-related additional control signals in order to actively increase or decrease the restoring force and thus the pretensioning force compared to the amount that is already set according to the axial deflection.
- the restoring device is preferably connected to a control and / or regulating device so that the restoring force and thus the pretensioning force is kept essentially in a defined limit range, in particular constant, during winding.
- the restoring force When winding, the restoring force is generated gradually due to the yielding installation arm bearing.
- the restoring force can be reset step by step when a limit threshold of a limit range is exceeded, without letting the restoring force / preload disappear, so that the restoring force always remains within the predetermined limits.
- a lowering of the restoring force is achieved by correspondingly adjusting the carrier relative to the relocation arm.
- the resetting device has a control and / or regulating device for setting the resetting force / preload, for example by setting the spring property of the resetting device and / or a control for setting the deflection amplitude of the relocation arm.
- the respective control and / or regulating device can be coupled to a sensor which detects the deflection width of the placement arm from the neutral position and communicates it to the control and / or regulating device, such as a microcomputer.
- the microcomputer can, for example, with a constant spring property of the resetting device, define a target deflection according to which a control process is initiated.
- the restoring force is adjustable.
- the winding device comprises a handling or actuating device in the form of a robot with three axes of movement, preferably in a vertical axis of movement and in a horizontal axis of movement in the laying direction of the laying arm, in particular parallel to the axis of rotation of the winding drum.
- the actuating device sets the carrier relative to the laying arm supported on the laid winding, whereby the elastic restoring force acting between the laying arm and the carrier can be increased or decreased.
- a control and / or regulating device is provided for the winding device, which adjusts the restoring force and only triggers a tracking of the carrier relative to the laying arm displaced by the increase in winding by means of the actuating device when the Ver leg arm has exceeded a predetermined deflection path or a deflection threshold along the carrier.
- the winding device preferably comprises a tracking device, according to which the carrier is tracked in the axial direction of displacement after the build-up of the elastic restoring force according to the increase in the winding in the axial direction.
- the tracking device has the actuator holding the carrier.
- the installation arm mounting is formed by a slide-rail arrangement.
- the carriage-rail arrangement ensures a linear guidance of the installation arm relative to the carrier, which is essentially parallel to the axis of rotation of the winding drum relative to the carrier.
- the rail is formed on the carrier side, while the slide is implemented on the laying arm side.
- the resetting device is connected between the slide and the rail, so that the corresponding force transmission points of the resetting device are arranged on the slide and on the rail.
- the laying bar of the laying arm is attached to the slide, while the handling device engages the rail of the carrier in order to provide readjustment of the carrier with respect to the laying arm.
- the end on the winding drum side is mounted in such a way that at least for a part, preferably for the entirety of the back and forth laying movement, in particular except for the change in laying direction, the winding drum side end forms an essentially axial lateral contact with a free lateral side of the last the winding drum wound winding loop is advanced through the axially expanding winding layer along the laying path.
- a corrective, flexible behavior of the laying arm required for automation is realized that comes very close to the manual manipulation of an experienced operator, so that in particular geometric imbalances of the winding drum or the winding do not impair an automated winding process.
- the end on the winding drum side is preferably formed by a freely rotatably mounted wheel on the laying arm, of which at least a part of the side area protrudes beyond the laying arm in order to be able to come into contact with the still free lateral side of the most recently wound winding loop, and that in the direction of rotation only from the winding drum or is driven in rotation by the winding material already lying on the winding drum.
- the wheel In In the laying direction, the wheel is taken along by the steadily axially growing winding layer along the laying path and axially shifted. The wheel rolls on the winding drum or the already completely laid winding layer at least under the influence of the weight of the laying arm.
- a preferred embodiment of the invention relates to an adjustment or release device which adjusts the laying arm at least during the laying movement near the side flange of the winding drum at an angle of incidence that is "positive" to the horizontal radial extension of the one side flange and inclines away from one side flange and inclines the laying arm in the course the to-and-fro movement towards the opposite side flange at a "negative" angle of inclination away from the other side flange.
- the adjusting device is preferably formed by the handling device, such as the adjusting robot, which, in order to operate the desired pivoting movement around the winding loop contact, adjusts the carrier.
- the pivot axis of the pivoting movement is preferably in the region of the end of the laying arm on the winding drum side.
- the pivot point can migrate along the to-and-fro path. It is sufficient to set a clearance angle of 1 ° to 20 °.
- the rotatable laying direction of the laying arm defined by the laying arm mounting is also inclined with respect to the axial direction, the inclination angle being correspondingly greatest at the axial ends of the back and forth laying movement and in the course of the back and forth laying movement, such as the release angle, decreases and disappears about halfway through the installation and then increases again, especially gradually.
- a traversing arm adjusting device for the vertical positioning of the traversing arm relative to the winding drum is provided for the operational adjustment of the traversing arm, in particular when the direction of the traversing is changed.
- the laying arm adjusting device cooperates with a displacement sensor for detecting at least one predetermined position of the laying arm along the laying path, the displacement sensor possibly causing the laying arm adjusting device to move the laying arm by at least about half the thickness of the winding material, preferably by about one winding material thickness or by more than one winding material thickness and at most twice the winding material thickness away from the winding drum or away from the winding layer already placed on it.
- the laying arm adjusting device can, in particular, have a vertical swivel mounting for the laying arm have, wherein a pivot axis of the laying arm is arranged on the carrier side.
- the pivot mounting can be implemented, for example, in that a laying arm blade on the winding drum side can be pivoted in the vertical direction relative to the laying arm base on the carrier side.
- the laying arm adjusting device can have a lifter for lifting the pivot axis in the vertical direction in particular linearly, the lifter being formed, for example, by the handling device, such as the positioning robot, which accesses the carrier in order to lift the carrier together with the laying arm pivot axis vertically in a linear manner.
- a winding material brake is arranged on the laying arm, which transmits a braking force to the winding material before it reaches the winding drum in order to pre-tension the winding material.
- the braking force can be adjusted according to operation, in particular by a control and / or regulation.
- the invention also relates to a method for winding a strand-like winding material in the form of a continuously extruded tube made of plastic onto the winding drum.
- the winding material is transferred to the rotating winding drum by means of a back and forth movement of the laying arm relative to a carrier.
- the laying arm is stored guided in the laying direction relative to a carrier.
- the method according to the invention is carried out with the winding device according to the invention.
- the winding device has a moving arm mounted movably on the carrier with a receptacle for receiving the winding material leaving in particular an extrusion station and a winding drum-side end at which the winding material of the rotating winding drum with an in particular linear back and forth movement of the laying arm along a
- the axis of rotation of the winding drum is to be passed winding.
- the carrier receives the winding material at the receptacle, which can be formed, for example, by a roller arrangement arranged in the shape of a cross.
- the to-and-fro movement of the laying arm is preferably purely translational for each winding layer in a horizontal plane.
- the laying arm is mounted on the carrier in such a way that at least during part of the particularly linear back and forth laying movement, the winding drum-side end of the laying arm follows the axially expanding winding layer, forming a lateral contact with a free lateral side of the winding of the winding material wound on the winding drum.
- the winding device does not provide the end on the winding drum side according to a predefined one Control routine, but provides a freedom of movement for the laying arm that yields to the increase in winding, whereby geometric imbalances and changes in the geometry during the winding process can be compensated for.
- the winding device according to the invention achieves automation even when unforeseeable changes in geometry and geometry properties have to be taken into account.
- the end of the laying arm on the winding drum side constantly contacts the most recently laid winding loop and is carried along by this according to the invention, whereby an elastic actuating force preferably acts on the winding drum-side end against the last winding loop laid by the laying arm, so that the lateral contact between the winding loop is also applied in the event of imbalances and axial or radial strikes
- the most recently laid winding loop and the end on the winding drum side are not lost, in particular due to inertia.
- the laying arm is mounted on the carrier in such a way that the end on the winding drum side temporarily loses contact with the winding for a change in the direction of the back and forth laying movement, in particular when forming a next winding layer, and so long without contact
- the winding remains until the end on the winding drum side is carried along by the free lateral side of the newly formed, first winding loop in the axial direction of the laying movement, forming the new lateral contact. Only at the two axial ends of the laying movement path is the constant contact between the end on the winding drum side and the winding layer and / or the drum core removed.
- the winding drum-side end follows the axial expansion of the winding layer yielding, in particular continuously, in that an elastic restoring or prestressing force of a restoring or prestressing device presses the winding drum-side end against the lateral side of the most recently laid winding loop.
- the elastic restoring force is essentially in the axial direction, in particular parallel to the axis of rotation of the winding drum, so that the essentially only lateral forces are introduced from the winding drum-side end into the most recently laid winding loop, so that the most recently laid winding loop is laterally, axially pretensioned against its adjacent winding loop.
- the elastic restoring force or axial prestressing against the winding loop laid last is preferably implemented by the restoring device, which can have a pneumatic actuator or another spring system, for example.
- the resetting device can act between the carrier and the relocation arm, which is movably mounted relative to the carrier.
- the end on the winding drum side has an engagement wheel which is freely rotatably mounted on the laying arm.
- the bearing of the engagement wheel should be free of any other drive forces, but should only be set in a rotary motion when it comes into contact with the winding drum or laterally with an already laid winding layer.
- the engagement wheel can have a fixed axis of rotation relative to the laying arm, which can be arranged essentially parallel or slightly inclined to the axis of rotation of the winding drum.
- the laying arm can be inclined at an angle to the radially extending inside of the side flange. In this case, the axis of rotation of the sprocket does not coincide with the axis of rotation of the winding drum, but is inclined by a few degrees.
- the engagement wheel has a circumferential cylindrical rolling surface which runs off the cylindrical drum core of the winding drum or on a winding layer already laid on the winding drum.
- the rolling surface of the engagement wheel presses on the drum core or the winding layer under the influence of the weight of the installation arm, which is pivotably mounted on the carrier in the vertical direction.
- the sprocket protrudes in sections beyond the end on the winding drum side in such a way that an unoccupied, freely accessible, lateral side area is formed which, in the case of a disc-shaped sprocket, is preferably a smooth, flat surface lying in a vertical plane.
- the engagement wheel is pressed under the influence of the axial restoring force against the free radial lateral side of the most recently laid winding loop.
- the freely accessible side area of the engagement wheel can be dimensioned in such a way that the lateral side of the winding material with the formation of the lateral contact is exclusively with it the side area engages.
- the running surface of the engagement wheel comes into rolling engagement with the radially underlying winding layer or the drum core.
- the laying arm is mounted on the carrier in such a way that the winding drum-side end extends along a linear path of engagement on the outer circumference of the winding drum core or on a winding layer last laid on the winding drum in accordance with the gradually axially increasing expansion of the winding layer to be laid around the thickness of the winding material gradually crazy.
- the path of engagement can preferably lie essentially at a 12 o'clock circumferential position in order to use the weight forces of the own weight of the installation arm most effectively.
- the laying arm preferably rests tangentially on the engagement path under the influence of its own weight.
- the laying arm has the shape of a sword.
- the shaft of the sword is on the carrier side, while the tip of the sword protrudes towards the winding drum.
- the tip of the sword is in constant contact with the winding drum or the winding layer that has already been laid, at least during the to-and-fro movement.
- the laying arm can be formed by two essentially parallel plates, the longitudinal direction of which extends towards the winding drum and the width of which is aligned in the vertical direction.
- the parallel plates can form a guide space or gap between them in which the winding material is guided within the laying arm towards the end on the winding drum side.
- the guidance of the wound material within the laying arm can preferably be formed by at least one, in particular, freely running roller and / or by at least one, in particular, freely running pair of rollers.
- the roller and / or the pair of rollers can be rotatably mounted on the plates.
- a delivery roller pair is preferably freely rotatably mounted, via which the winding material leaves the laying arm in order to be wound in the course to the winding drum without influencing a further mechanical structure such as the indexing wheel.
- the carrier-laying arm mounting has a slide-rail arrangement through which the laying arm is guided in particular essentially parallel to an axis of rotation of the winding drum relative to the carrier.
- the rails are fastened to the carrier and the slides are fastened to the laying arm, the resetting device acting between the slide and the rail.
- the restoring device serves to generate an elastic spring force in order to pretension the end on the winding drum side against the winding loop that was laid last.
- the winding device comprises a laying arm bearing that guides the laying arm in a laying direction relative to the carrier, particularly linearly rotatable depending on the axial position along the laying path, and a restoring or pretensioning device which, when the laying arm is deflected in the laying direction, relatively communicates a restoring or pre-tensioning force to the support to the laying arm in order to urge the laying arm laterally, essentially axially, against a winding loop that was last placed on the winding drum.
- the installation arm mounting can have a slide-rail arrangement, according to which the installation arm is guided linearly in the installation direction relative to the carrier.
- the axial direction is defined by the axis of rotation of the winding drum.
- the rotatable laying direction can be parallel to the axial direction, in particular depending on the position of the laying arm along the laying path, and / or be inclined in order to generate a free angle of the laying arm, in particular less than 20 ° with respect to the horizontal radial extension of the side flange of the winding drum.
- the slide is designed on the laying arm side, the rail being realized on the carrier side.
- a handling device in the form of a positioning robot moves the carrier, following the laying arm, and serves to reduce the increasing deflection of the laying arm, which is caused by the axial growth of the winding layer and always leads the carrier moving up.
- the restoring force is used to constantly press the laying arm against the most recently laid winding loop and, in particular, to maintain a pretension against the winding loop and thus the winding loop contact when the handling device follows the carrier following the laying arm.
- the carrier may only be adjusted to such an extent that a sufficient pre-tensioning force continues to remain on the laying arm against the winding loop that was laid last. The higher the deflection of the installation arm relative to the carrier, the stronger the restoring force of the restoring device.
- a preferred embodiment of the invention relates to an adjustment or release device which, at least during the laying movement, moves the laying arm near the side flange of the winding drum in one direction to the horizontal radial extension of one side flange "positive" angle of inclination away from the one side flange and tilts the laying arm in the course of the to-and-fro movement towards the opposite side flange in a "negative" angle of inclination away from the other side flange.
- the adjusting device is preferably formed by the handling device, such as the adjusting robot, which, in order to operate the desired pivoting movement about the winding loop contact, adjusts the carrier.
- the pivot axis of the pivoting movement is preferably in the region of the end of the laying arm on the winding drum side.
- the pivot point can migrate along the to-and-fro path. It is sufficient to set a clearance angle of 1 ° to 20 °.
- the rotatable laying direction of the laying arm defined by the laying arm mounting is also inclined with respect to the axial direction, the inclination angle being correspondingly greatest at the axial ends of the back and forth laying movement and in the course of the back and forth laying movement, such as the release angle, decreases and disappears about halfway through the installation and then increases again, especially gradually.
- a traversing arm adjusting device for the vertical positioning of the traversing arm relative to the winding drum is provided for the operational adjustment of the traversing arm, in particular when the direction of the traversing is changed.
- the laying arm adjusting device cooperates with a displacement sensor for detecting at least one predetermined position of the laying arm along the laying path, the displacement sensor possibly causing the laying arm adjusting device to move the laying arm by at least about half the thickness of the winding material, preferably by about one winding material thickness or by more than one winding material thickness and at most twice the winding material thickness away from the winding drum or away from the winding layer already placed on it.
- the laying arm adjusting device can have, in particular, a vertical pivot bearing for the laying arm, a pivot axis of the laying arm being arranged on the carrier side.
- the pivot mounting can be implemented, for example, in that a laying arm blade on the winding drum side can be pivoted in the vertical direction relative to the laying arm base on the carrier side.
- the laying arm adjusting device can have a lifter for lifting the pivot axis in the vertical direction, in particular, the lifter being formed, for example, by the handling device in the form of a positioning robot that accesses the carrier in order to lift the carrier together with the laying arm pivot axis vertically in a linear manner.
- the Pivot mounting a system stop that limits a lowering of the winding drum-side end of the laying arm.
- the pivot bearing allows on the one hand a flexible contact sequence of the winding drum-side end on the already laid winding layer and thus a free contour following of the already laid winding layer and its radial imbalances, on the other hand the contact stop limits a lowering of the winding drum-side end starting from the support on the winding layer by a maximum of half the thickness of the winding material , the end on the winding drum side should get between two adjacent winding loops.
- a winding material brake is arranged on the laying arm, which applies a braking force to the winding material before it reaches the winding drum in order to pre-tension the winding material.
- the braking force can be adjusted according to operation, in particular by a control and / or regulation.
- the winding device according to the invention is generally provided with the reference number 1.
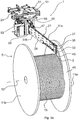
- the winding device 1 is used to wind a plastic pipe 3 continuously extruded from an extrusion station (not shown), such as a so-called cable protection pipe, onto a winding drum 5, with the most uniform possible winding without a gap between the individual winding loops 17 and with a substantially constant winding pitch of a plastic pipe width per Rotation is to be achieved, for example in the Figures 1 to 4b is shown.
- the winding drum 5 comprises an essentially cylindrical drum core 7, at each of the two axial ends of which a lateral side flange 11a, 11b extending in the radial direction is attached.
- a rotation axis 13 of the winding drum 5 is fixedly mounted (with respect to a reference base B on which the winding device 1 stands), around which the winding drum 5 rotates to carry out the winding process.
- the axis of rotation 13 defines an axial direction to which reference is also made below for the definition of movements of movable components of the winding device 1.
- the standardized winding drum 5 is often made of wood, with the drum core 7 and also the side flanges 11a, 11b being able to deviate slightly, but not negligibly, from an ideally symmetrical shape.
- the cylindrical drum core 7 can have radial runouts, while the side flanges 11a, 11b can form axial imbalances.
- the extruded plastic pipe 3 is already wrapped around the drum core 7 by more than the axial half of the winding drum 5 in an initial winding layer.
- the winding loop applied last to the drum core 7 is to be provided with the reference number 17.
- the winding loop 17 has, until the next winding loop has been laid completely circumferentially and has laid itself laterally, a circumferentially free axial lateral side 18, which is referred to in the following primarily at a point around 12 o'clock on the circumference (contact with engagement wheel 43) shall be.
- the plastic pipe 3 is continuously extruded cylindrically along its extension and can have an outer diameter of 5 mm to 30 mm or 40 mm.
- the thickness of the plastic pipe 3 can be around 10% to 60% of the outer pipe radius.
- the plastic pipe 3 is continuously formed in an extrusion station (not shown) and passes via a cooling line (water bath) into the winding device 1, which can be preceded by a plastic pipe (3) buffer system (not shown) through which the different conveying speeds of the Plastic pipe 3 should be compensated in the longitudinal direction during the extrusion process and when winding.
- the buffer system can be designed as a vertical pendulum, for example, which can compensate for too low / too high a speed of the winding device 1 compared to the extrusion device due to the vertical displaceability of a deflection wheel by the deflection wheel occupying a higher / lower vertical position. In this way, a buffer section for the extruded plastic pipe (3) for a continuous production process can be achieved before it reaches the winding device 1.
- the winding device 1 consists essentially of four main components, namely a carrier 23, a laying arm 27, a restoring device 61 as well as only one in Figure 5 indicated positioning robot 71.
- the laying arm 27 has a shape like a chainsaw with a laying arm base 28 (actuator / motor base) and a laying sword 29, which extends from the laying arm base 28 essentially in the horizontal direction to the winding drum 5 and touches it directly or indirectly.
- the laying arm base 28 has a receptacle 21 on its end face facing away from the winding drum 5 ( Figures 6 , 9 and 10 ) to accept the plastic tube 3, in particular continuously leaving an extrusion station.
- the receptacle 21 comprises pairs of rollers 25 arranged in a star shape, which delimit a threading opening by a horizontal and to ensure vertically guided threading of the plastic pipe 3 into the laying arm 27.
- the laying arm base 28 is mainly formed by a profile support 57 which is composed of several support plates joined to one another. Functional components of the winding device 1, such as a microcomputer, actuators, etc., can be attached to the support plates.
- the carrier 23 movably holds the laying arm 27 and, in the embodiment shown, has a rail 51 to which a gripping arm of the positioning robot 71 is attached.
- the rail 51 cooperates with a slide 53 of the traverse arm base 28 such that the traverse arm 27 can be moved back and forth along the linear slide path.
- the laying bar 29 extends predominantly in a horizontal direction, approximately perpendicular to the axial direction 13 away from the laying arm base 28 towards the winding drum 5, the laying arm 27 being dimensioned in such a way that it extends over the drum core 7 in its longitudinal direction (up to approximately its axial center). protrudes (viewed in lifting direction A).
- the laying sword 29 has two vertical guide and holding plates 31a, 31b arranged parallel to one another.
- a guide gap for the plastic pipe 3 is formed between the two holding and guide plates 31a, 31b, which have a substantially constant vertical width in their substantially horizontal extension direction. So that the plastic pipe 3 can slide safely from the receptacle 21 along the laying arm 27 between the holding and guide plates 31a, 31b, guide rollers can be rotatably mounted in the guide gap on the holding and guide plates 31a, 31b and a location-defined guide channel through the guide gap form.
- a pair of delivery rollers 35 with horizontal axes of rotation are still mounted in the guide gap, which ensure a guided delivery of the plastic pipe 3 from the end 33 of the laying arm 27 on the winding drum side to the winding drum 5.
- a displacement sensor in the form of a contactor 37 is positioned on an upper side of the end 33 on the winding drum side.
- the contactor 37 comprises a freely rotatably mounted contact wheel whose axis of rotation is arranged vertically.
- Another displacement sensor system known from the prior art can also be used.
- the contact wheel is in a passive operating state in the course of the laying movement W of the laying arm 27 between the left side flange 11b and the opposite right side flange 11a, in which the axis of rotation lies in a guide gap of the laying sword 29.
- the contact wheel of the contactor 37 As soon as the contact wheel of the contactor 37 comes into engagement with the radial inside 41 of the respective side flange 11a, 11b, the contact wheel, in particular its vertical axis of rotation, is deflected in the axial direction because the contact wheel at the end 33 of the transfer arm 27 on the winding drum side is axially in both axial directions protrudes and is pivotably mounted on the laying arm 27 for an axial deflection.
- the contactor 37 sends an electrical contact signal to a control and / or regulating device (not shown in greater detail) which processes the contact signal for the further winding operation of the winding device 1.
- an engaging wheel 43 is mounted in a freely rotatable manner on the laying arm 27, the axis of rotation of which is essentially horizontally parallel to the axis of rotation 13 of the winding drum 5.
- the running surface of the engagement wheel 43 is in direct rolling contact with the driven drum core 7 or an already laid winding layer.
- a freely accessible side area of the engagement wheel 43 rests against the axial lateral side 18 of the most recently laid winding loop 17 during winding with a predominantly axial pressure pretensioning contact.
- the axial width of the running surface of the engagement wheel 43 is dimensioned in such a way that it is greater than half the outer diameter of the plastic pipe 3, but smaller than the outer diameter of the plastic pipe 3.
- the laying arm 27 is mounted so that it can pivot vertically via a carrier-side (23) pivot bearing, which is not illustrated in more detail, with a carrier-side pivot axis S running horizontally, at least depending on the laying path position, parallel to the axis of rotation 13 of the winding drum 5.
- a damping unit 45 is provided, which is fastened on the one hand to the carrier 23 and on the other hand to a projection 47 on the top of the laying sword 29.
- the damping unit 45 ensures a damped pivoting movement of the laying arm 27 about the pivot axis S on the carrier side.
- a pivot stop (not shown) is provided which limits the pivoting of the laying arm 27 downward in the vertical plane onto the winding drum 5.
- the swivel stop ensures that the engagement wheel 43 does not push between two already laid winding loops and push itself through completely between them in order to avoid contact engagement of the engagement wheel 43 with a complete winding layer underneath.
- the pivoting mobility of the traversing arm 27 and the position of the pivoting stop are set relative to the traversing arm 27 such that the engagement wheel 43 is in rolling contact with the cylindrical drum core 7 or the most recently laid winding position during the to-and-fro movement.
- the pivot stop stops the engaging roller 43 from being lowered from at most half the thickness of the plastic pipe 3, so that rolling contact on the most recently completely laid winding layer is prevented.
- the carrier 23 can be displaced relative to the fixed axis of rotation 13 or to the fixed reference floor B of a production hall by one of the positioning robots 71, which is fixedly mounted on the reference floor B, grasping the carrier 23, holding it and positioning it according to the winding process.
- the point of engagement of the engagement wheel 43 with the drum core 7 or the already laid winding layer forms an actuation point at which the laying arm 27 is axially displaced in advance relative to the carrier 23 by the axial growth of the winding layer 15.
- This can be referred to as a flexibly reacting subsequent movement of the laying arm 27, which immediately follows the continuous axial laying of the winding loops 17 and the axial growth of the winding layer 15.
- a vertical pivoting movement about the pivot axis S due to the engagement of the engagement wheel 43 on the winding drum 5 and a radial growth of the winding layers realizes a subsequent readjustment of the laying arm 27, which is initially mounted on the stationary carrier 23.
- the yielding movement of the laying arm 27 and the adjustment movement of the carrier 23 are with the double arrows V, A in Figure 5 indicated.
- the positioning robot 71 holds the carrier 23 by means of the rail 51, which cooperates with the slide 53, which is formed from a base plate 55 and a profile carrier 57 extending downward therefrom.
- the slide 53 and the rail 51 form a translational bearing, the translational displacement direction V of which is defined essentially or approximately parallel to the horizontal axial direction (axis of rotation 13).
- the carriage (53) -rail (51) arrangement gives the laying arm 27 freedom of movement with respect to the carrier 23 only in the laying direction V, so that the carriage 53 only in the laying direction V relative to the positioning robot 71, in particular its gripping arm (not shown). , can be relocated.
- the rail (51) -slide (53) arrangement provides axial compliance for the traverse arm 27.
- the axial flexibility is created by the degree of freedom of movement in the laying direction V. So that the engaging wheel 43 does not lose contact with the lateral side of the most recently laid winding loop 17 during the laying process between the two side flanges 11a, 11b, a restoring or prestressing device 61 acts between the carriage 53 and the rail 51, which creates an elastic restoring or prestressing force generated as soon as the laying arm 27 is deflected from a predefined neutral position relative to the carrier 23, in which no restoring forces of the restoring device 61 act between the rail 51 and the slide 53, in the laying direction V, driven by the axial expansion of the winding layer 15.
- the reset device 61 is formed by a pair of pneumatic actuators 63, 65, the details of which are shown in FIGS Figures 7 to 10 are indicated.
- a pneumatic actuator 65 or 63 is only active in one of the displacement directions V (for example from the side flange 11a to the side flange 11b) for generating the restoring force, while the other pneumatic actuator (65 or 63) is active in the opposite displacement direction V (from the side flange 11b to the side flange 11a) is active.
- the end 33 of the laying arm 27 together with the slide 53 is displaced in the linear laying direction V relative to the rail 51, which remains unaffected temporarily in its position until it is readjusted, for example, when a deflection threshold of the carriage 53 is exceeded by the positioning robot 71, which reduces the restoring force of the restoring device.
- the pneumatic actuator 63 or 65 (depending on the axial Laying direction) pneumatically so that the pneumatic elastic restoring force is generated in the pneumatic actuator 63, 65, which is communicated to the laying arm 27 via the carriage 53 and finally prestresses the engagement wheel 43 axially against the free lateral side 18 of the last wound loop 17.
- the axial restoring preload ensures that all winding loops 17 are placed close to one another in the axial direction in order to achieve the desired uniform winding sequence and that geometrical and material-specific anomalies can be flexibly adapted.
- the pneumatic actuator 63, 65 can also generate an actively controlled, pneumatic restoring force independently of the relocation of the traversing arm 27, for example by activating the pneumatic actuator via a control and / or regulating device, for example, depending on a predetermined operating state is activated pneumatically.
- the pneumatic actuator 63 is uncontrolled and (only) builds up elastic restoring forces when the laying arm 27 is displaced from its neutral position in the laying direction V.
- the axial deflection between the carriage 53 and the rail 51 is kept essentially constant or at least in a limit area.
- a position sensor (not shown) is used, which monitors a predefined minimum and maximum target deflection amplitude with the aid of a control and / or regulating device (not shown in more detail). If this is exceeded or not reached, the positioning robot 71 moves the rail 51 following the deflection movement of the laying arm 27, wherein the step up can correspond approximately to the thickness of the plastic pipe 3. In this way it is ensured that the elastic restoring force is reduced by following the rail 51 by the periodic build-up of the deflection.
- the plastic tube 3 is subjected to a constant tensile prestressing force as far as possible in its longitudinal direction when it is wound around the drum core 7.
- an electromagnetic brake in particular an eddy current brake 67
- the eddy current brake 67 which can optionally be set and manipulated by a control and / or regulating device that is not detailed, serves to communicate the essentially uniform tensile prestressing force to the plastic pipe 3.
- the eddy current brake 67 can have two magnet rotors that rotate in an electromagnetically generated magnetic field, wherein the respective magnet rotor can be retracted and extended in order to adjust the electromagnetic braking force.
- a toothed belt 72 is provided, which is tensioned around two deflection rollers of the eddy current brake 67.
- the toothed belt 72 has transverse teeth in order to ensure a desired engagement with the plastic pipe 3 and the transmission of frictional force.
- a mountain-valley profile running in the longitudinal direction can also be provided, which is shaped to complement the plastic tube 3.
- this causes the laying arm 27 to be lifted vertically, in that the positioning robot 71 does not raise the carrier 23 and its rail 51 in the lifting direction A by more than the thickness of the plastic pipe 3, but not closer
- the vertical pivot stop shown takes the laying arm 27 with it in the vertical lifting direction in order to raise the end 33 of the laying arm 27 on the winding drum side by slightly more than the outer diameter of the plastic pipe 3 over the winding layer 15 that has just ended.
- This operating state of the raised winding drum-side end 33 is in the Figures 3a and 3b can be seen, as is the deflected contactor 37. In the axial end position of the end 33 of the laying arm 27 on the winding drum side, there is temporarily no contact between the engagement wheel 43 and the plastic tube 3.
- That the laying arm 27 is already deflected away from the axial end position can also be seen from the position of the contact wheel of the contactor 37, which is again in the passive operating state and is no longer in rolling contact with the inside 41 of the side flange 11a.
- a (positive) angle of incidence ⁇ decreases, so that the longitudinal extent of the laying arm 27 coincides with the horizontal radial direction H R approximately in the axial center of the winding drum 5, while the laying arm 27 in the opposite axial laying end position is also inclined towards the center of the winding drum 5 at a (negative) angle of incidence ⁇ , in particular of the same size.
- the contactor 37 can reliably trigger by pivoting the contact wheel to the side.
- the side flange 11a, 11b extending in the radial direction does not conflict with the movement of the laying arm 27 inclined in relation thereto.
Landscapes
- Winding Filamentary Materials (AREA)
- Moulding By Coating Moulds (AREA)
- Winding Of Webs (AREA)
Description
- Die Erfindung betrifft eine Vorrichtung für ein Verfahren zum Wickeln eines strangförmigen Wickelguts in Form eines kontinuierlich extrudierten Rohres aus Kunststoff auf eine rotierende Wickeltrommel. Bei dem Wickelgut, beispielsweise einem Kabelschutzrohr, in dem ein Glasfaserkabel geschützt verlegt werden kann, kommt es unter anderem darauf an, das Wickelgut in einer Länge von mehreren hundert Metern bei begrenztem Platz vorrätig zu halten. Es ist bekannt, das Wickelgut auf eine Wickeltrommel oder -spule, wie eine Flanschspule, zu wickeln und vor Ort je nach Bedarf abzuwickeln. Der Aufwickelvorgang schließt aus fertigungsökonomischen Gründen unmittelbar an den Herstellprozess, insbesondere an das Extrudieren, des Wickelguts an, so dass das eben extrudierte Kunststoffwickelgut unabgelängt eine Kühlstation verlässt und der Wickelungsvorrichtung zugeführt wird. Der Wickelvorgang selbst wird dann üblicherweise von einer Bedienperson kontrolliert und gegebenenfalls manuell manipuliert.
- Bei der Verwendung eines Kabelschutzrohres als Wickelgut wird üblicherweise eine Standard-Wickeltrommel aus Holz verwendet. Das auf die Holz-Wickeltrommel gewickelte Kabelschutzrohr wird an Baustellen geliefert, um es dort je nach Bedarf zu verbauen. Solche günstigen, genormten Holz-Wickeltrommeln oder auch andere Wickeltrommeln haben sich aufgrund eines relativ niedrigen Preises und der möglichen Wiederverwendbarkeit insbesondere im Einsatz auf Baustellen bewährt. Allerdings haben die Wickeltrommeln rotationsunsymmetrische Axial- und Radial-Schläge aufgrund von Unwuchten an den seitlichen Seitenflanschen und an dem Trommelkern. Wegen der geometrischen Unregelmäßigkeit der Wickeltrommel ist gemäß Stand der Technik eine von einer Bedienperson überwachte und manipulierte Aufwickelung des Wickelguts notwendig. Eine Automatisierung ist neben unvorhersehbaren Geometrieunterschieden von Niedrigpreistrommeln auch insofern bisher nicht erreicht, als sich außerdem bei Kunststoffrohren die Materialeigenschaften erst nach längerer Aushärtezeit stabilisieren, so dass sich die Wickeleigenschaft des Kunststoffrohrs nach und während des Wickelns aufgrund von Änderungen der Materialeigenschaften nach dem Extrudieren kaum vorhersagen lässt. Derartige individuelle Wickelparameter erfordern ein Bedienpersonal mit langjähriger Wickelerfahrung beim Überwachen und Manipulieren des Wickelguts. Bisher konnte eine zumindest annähernd vollständig automatisierte Wickelung ohne manuelle Unterstützung einer Bedienperson insbesondere bei einer Wickelgeschwindigkeit von über 100 m pro Minute nicht erreicht werden.
- In der Automatisierungstechnik sind Wickelungsverfahren sowie Wickelungsvorrichtungen an sich bekannt, bei denen Elektrokabel auf geometriepräzise Rollen aufgewickelt werden.
EP 0203046 B1 offenbart beispielsweise einen Kabelwickler, bei dem ein Führungsarm, der zur Wickelrolle gerichtet ist, mehrere Armglieder aufweist, die mittels mehrerer Armgelenkstellen miteinander verbunden sind. Es zeigte sich allerdings, dass bei den bekannten Wickelungsautomatisierungsprozessen sowohl für das Kabel als auch für die Wickeltrommel Idealbedingungen vorliegen, was insbesondere die Geometrie der Wickeltrommel als auch die Materialeigenschaften des Wickelguts angeht. Gerade bei Drahtwicklern handelt es sich um Produkte hoher Werkstoffgüte und gleichmäßiger Materialeigenschaften, weswegen auch höherer Kostenaufwand betrieben wird, idealgeometrische, unwuchtfreie Wickelspulen zu verwenden. Es zeigte sich, dass die bekannten automatisierten Wickelungstechniken dann nicht erfolgreich eingesetzt werden können, wenn ein Wickelgut sowie eine Wickeltrommel verwendet werden, deren Material- bzw. Geometrieeigenschaften nicht vorhersehbar sind. -
US 4 124 340 A offenbart eine Vorrichtung gemäß dem Oberbegriff des Anspruchs 1. - Es ist Aufgabe der Erfindung, die Nachteile des Stands der Technik zu überwinden, insbesondere eine Vorrichtung und ein Verfahren zum Wickeln eines strangförmigen Wickelguts in Form eines kontinuierlich extrudierten Rohres aus Kunststoff auf eine Wickeltrommel bereit zu stellen, wobei eine Automatisierung zu erreichen ist, bei der ein manueller Eingriff durch eine Bedienperson weitestmöglich vermieden werden kann.
- Diese Aufgabe wird durch die Merkmale des unabhängigen Anspruchs 1 gelöst.
- Danach ist eine Vorrichtung zum Wickeln eines strangförmigen Wickelguts in Form eines kontinuierlich extrudierten Rohres aus Kunststoff auf eine Wickeltrommel vorgesehen. Die erfindungsgemäße Wickelvorrichtung umfasst einen Stellroboter und einen Träger, an dem beispielsweise Elektronikkomponenten der Vorrichtung angeordnet sein können. Der Träger kann auch lediglich dazu ausgeführt sein, einen Angriffsbereich zum Befestigen eines Greifarms eines Stellgeräts oder eines Handhabegeräts in Form eines Roboters, zu bilden. Der
- Träger hat eine Schiene für eine Schienen-Schlitten-Anordnung. Des Weiteren hat die erfindungsgemäße Wickelungsvorrichtung einen an dem Träger gelagerten Verlegearm, über dessen Ende das Wickelgut der rotierenden Wickeltrommel bei einer axialen insbesondere linearen Hin- und Herverlegebewegung des Verlegearms aufwickelnd übergeben wird. Vorzugsweise ist die axiale Hin- und Herbewegung rein translatorisch linear und im Wesentlichen parallel zur Rotationsachse der Wickeltrommel ausgerichtet. Insbesondere beschreibt das wickeltrommelseitige Ende den axialen linearen Hin- und Herverlegeweg zwischen den beiden sich gegenüberliegenden Seitenflanschen der Wickeltrommel. Von der Wickeltrommel abgewandt hat der Verlegearm eine Aufnahme zum Annehmen des insbesondere eine Extrudierstation kontinuierlich verlassenden Wickelguts. Die Aufnahme kann beispielsweise durch eine sternförmige Anordnung von mehreren, insbesondere vier, freilaufenden Rollen gebildet sein. Die Aufnahme kann zusätzlich eine Tragstruktur aufweisen, an der beispielsweise elektronische Komponenten, aber auch pneumatische Dämpfungssysteme für die Lagerung des Verlegearms gehalten sein können.
- Die erfindungsgemäße Wickelungsvorrichtung hat außerdem eine Verlegearmlagerung, die den Verlegearm in insbesondere axialer Verlegerichtung relativ zum Träger führt. Die erfindungsgemäße Wickelungsvorrichtung hat eine Rückstell- oder Vorspanneinrichtung, die bei einer insbesondere durch das axiale Wachstum der Wickelungslage auf der Wickeltrommel veranlasste Auslenkung des Verlegearms insbesondere aus einer Neutralposition des Verlegearms relativ zum Träger eine insbesondere elastische insbesondere im Wesentlichen axial gerichtete Rückstell- oder Vorspannkraft erzeugt und dem Verlegearm mitteilt, um den Verlegearm seitlich gegen die zuletzt auf die Wickeltrommel gelegte Wickelungsschlaufe zu drücken.
- Die Rückstelleinrichtung und die Verlegearmlagerung spannen den Verlegearm derart vor, dass dieser sich drückend insbesondere an dessen wickeltrommelseitigem Ende axial an der Wickelung, insbesondere der zuletzt gelegten Wickelungsschlaufe, abstützt. Je größer die Auslenkung des Verlegearms relativ zum Träger ist, je stärker ist die die axiale Vorspannung hervorrufende Rückstellkraft.
- In der Neutralposition wirkt vorzugsweise keine Rückstellkraft auf den Verlegearm und somit auf die zuletzt gelegte Wickelungsschlaufe. Vorzugsweise wirkt die von der Rückstelleinrichtung erzeugte Rückstellkraft ständig auf die zuletzt gelegte Wickelschlaufe während der gesamten Hin- und Herverlegebewegung des Verlegearms. Die Rückstellkraft und damit das ständige axiale Vorspannen des wickeltrommelseitigen Endes des Verlegearms gegen die Wickelungsschlaufe drücken die zuletzt gelegte Wickelungsschlaufe axial gegen die unmittelbar benachbarte Wickelungsschlaufe, wodurch sich eine kompakte, lückenlose Wickelstruktur einstellt. Die durch die Verlegearmlagerung realisierte Nachgiebigkeit in Verlegerichtung kombiniert mit der elastischen Rückstellvorspannung entgegen der Verlegerichtung lässt eine Positionsveränderung des Verlegearms zu, die von der sich allmählich aufbauenden Wickelung auf der Wickeltrommel veranlasst ist. Beim erfindungsgemäßen Wickeln führt der Verlegearm keine aktiv festgelegte, insbesondere geregelte Stellprozedur aus, sondern passt sich ständig flexibel an geometrische Besonderheiten und materialspezifische Eigenheiten der Wickelung an. Bei einer Weiterbildung der Erfindung kann eine besonders funktionssichere Automatisierung der Wickelung bei hohen Forderungs- und Wickelgeschwindigkeiten von bis zu 100 m/min und darüber hinaus erreicht werden. Zusätzlich zu der translatorischen flexiblen Lagerung in Verlegerichtung kann der Verlegearm auch in einer Vertikalrichtung flexibel gelagert sein.
- Die Verlegearmlagerung kann vorzugsweise eine rein translatorische Verstellung des trägerseitigen Endes des Verlegearms und gegebenenfalls eine rein translatorische Vertikalbewegung des trägerseitigen Endes des Verlegearms zulassen. Zusätzlich könnte gegebenenfalls der Verlegearm durch eine entsprechende trägerseitige Verlegearmschwenklagerung eine Schwenkbewegung des Verlegearms um das trägerseitige Ende des Verlegearms ausführen, wobei sowohl eine Schwenkbewegung in einer axialen Ebene als auch in einer vertikalen Ebene zugelassen sein kann. Diese Verlegearmschwenklagerung muss eine Schwenkamplitude nur von wenigen Grad insbesondere kleiner 20° zulassen. Je länger die Längsausdehnung des Verlegearms, desto geringer braucht die Schwenklagerungsamplitude in Vertikalrichtung und Horizontalrichtung ausgelegt sein.
- Bei einer bevorzugten Ausführung der Erfindung ist ein wickeltrommelseitiges Ende des Verlegearms, das beispielsweise als freilaufendes Eingriffsrad ausgebildet sein kann, derart ausgeführt, dass das wickeltrommelseitige Ende wegen der Rückstellkraft bei der axialen Hin- und Herverlegebewegung, insbesondere während der gesamten Hin- und Herbewegung in einem insbesondere ständigen Lateralkontakt mit einer zumindest umfangsabschnittsweise freien Lateralseite der zuletzt gelegten Wickelungsschlaufe kommt, so dass insbesondere der Verlegearm je nach axialem Wachstum der zu legenden Wickelung, also je nach axialer Auslenkung aus der Neutralposition beispielsweise schrittweise um die axiale Ausdehnung einer Wickelungsschlaufe in axialer Verlegerichtung ausgelenkt ist. Entsprechend der axialen Auslenkung wird durch die Rückstelleinrichtung eine Rückstelldruckkraft erzeugt, die über das wickeltrommelseitige Ende des Verlegearms der Lateralseite der zuletzt gelegten Wickelungsschlaufe mitgeteilt wird.
- Bei einer bevorzugten Ausführung der Erfindung umfasst die Rückstelleinrichtung eine insbesondere durch die Steuerungs- und/oder Regelungseinrichtung ansteuerbare oder einstellbare Federung, die bei entsprechender Auslenkung des Verlegearms aus der Neutralposition in eine Auslenkposition eine elastische Rückstellkraft erzeugt, insbesondere errechnet und einstellt. Es sei klar, dass eine ansteuerbare Federung bereits eine Rückstellkraft erzeugen kann, ohne dass eine Auslenkung des Verlegearms aus einer Neutralposition einhergeht. Die Rückstellkraft ist derart ausgerichtet, dass deren Wirkrichtung parallel zur axialen Verlegerichtung, insbesondere parallel zur Rotationsachse der Wickeltrommel liegt. Damit die Rückstelleinrichtung das wickeltrommelseitige Ende gegen die zuletzt gelegte Wickelschlaufe drückt, ist die Wirkrichtung der Rückstellkraft der Verlegerichtung entgegengesetzt.
- Die Rückstellkraft dient vorzugsweise nur dazu, den Verlegearm in Axialrichtung gegen die Wickelung vorzuspannen und daran abzustützen. Den Verlegearm relativ zum Träger wieder zurückzustellen, realisiert vorzugsweise ein den Träger haltendes Stellgerät, wie ein Roboter, der bei Überschreitung einer Auslenkschwelle oder einer maximalen Rückstell-/Vorspannkraft den Träger relativ zu dem ausgelenkten Verlegearm nachführt.
- Bei einer bevorzugten Ausführung der Erfindung ist die Rückstelleinrichtung durch einen pneumatischen Aktor, insbesondere durch ein Paar pneumatische Aktoren, gebildet, von denen einer der Aktoren für die Erzeugung der Rückstellkraft in jeweils einer axialen Verlegerichtung verantwortlich ist. Der pneumatische Aktor kann mit einer Steuerungs- und/oder Regelungseinrichtung gekoppelt sein, um betriebsbedingte oder wickelungsbedingte Zusatzsteuersignale zu erhalten, um die Rückstellkraft und somit die Vorspannkraft gegenüber dem sich ohnehin einstellenden Betrag gemäß der axialen Auslenkung aktiv zu erhöhen oder zu senken.
- Vorzugsweise ist die Rückstelleinrichtung mit einer Steuerungs- und/oder Regelungseinrichtung verbunden, damit die Rückstellkraft und somit die Vorspannkraft während des Wickelns im Wesentlichen in einem festgelegten Grenzbereich, insbesondere konstant gehalten wird.
- Beim Wickeln wird die Rückstellkraft schrittweise aufgrund der nachgebenden Verlegearmlagerung erzeugt. Die Rückstellkraft kann bei Überschreitung einer Grenzschwelle eines Grenzbereichs schrittweise zurückgesetzt werden, ohne die Rückstellkraft/Vorspannung verschwinden zu lassen, so dass die Rückstellkraft stets in den vorbestimmten Grenzen verbleibt. Ein Senken der Rückstellkraft wird durch entsprechendes Nachführen des Trägers relativ zu dem Verlegearm realisiert.
- Bei einer Weiterbildung der Erfindung hat die Rückstelleinrichtung eine Steuerungs- und/oder Regelungseinrichtung zum Einstellen der Rückstellkraft/Vorspannung beispielsweise mittels Einstellung der Federeigenschaft der Rückstelleinrichtung und/oder eine Steuerung zum Einstellen der Auslenkamplitude des Verlegearms. Die jeweilige Steuerungs- und/oder Regelungseinrichtung kann mit einem Sensor gekoppelt sein, der die Auslenkweite des Verlegearms aus der Neutralposition erfasst und der Steuerungs- und/oder Regelungseinrichtung, wie einem Mikrorechner, mitteilt. Der Mikrorechner kann beispielsweise bei einer konstanten Federeigenschaft der Rückstelleinrichtung eine Sollauslenkung festlegen, gemäß dieser ein Regelungsprozess initiiert ist.
- Bei der Erfindung ist die Rückstellkraft einstellbar. Dies ist dadurch realisiert, dass der Träger relativ zum Verlegearm, der sich an der gelegten Wickelung, insbesondere an der zuletzt gelegten Wickelungsschlaufe, abstützt, nachgeführt wird. Hierfür umfasst die erfindungsgemäße Wickelungsvorrichtung ein Handhabe- oder Stellgerät in Form eines Roboters mit drei Bewegungsachsen, vorzugsweise in einer vertikalen Bewegungsachse und in einer horizontalen Bewegungsachse in Verlegerichtung des Verlegearms, insbesondere parallel zur Rotationsachse der Wickeltrommel. Das Stellgerät stellt den Träger relativ zu dem sich an der gelegten Wickelung abstützenden Verlegearm, wodurch die zwischen dem Verlegearm und dem Träger wirkende elastische Rückstellkraft erhöht oder gesenkt werden kann. Es ist eine Steuerungs- und/oder Regelungseinrichtung für die Wickelungsvorrichtung vorgesehen, die die Rückstellkraft einstellt und ein Nachführen des Trägers gegenüber dem durch den Wickelungszuwachs verlagerten Verlegearm mittels des Stellgeräts erst dann auslöst, wenn der Ver legearm einen vorbestimmten Auslenkweg oder eine Auslenkschwelle entlang des Trägers überschritten hat.
- Vorzugsweise umfasst die Wickelungsvorrichtung eine Nachführeinrichtung, gemäß der der Träger in axialer Verlegelagerungsrichtung nach dem Aufbau der elastischen Rückstellkraft gemäß dem Zuwachs der Wickelung in Axialrichtung nachgeführt wird. Dafür hat die Nachführeinrichtung das den Träger haltende Stellgerät.
- Bei der Erfindung ist die Verlegearmlagerung durch eine Schlitten-Schienen-Anordnung gebildet. Die Schlitten-Schienen-Anordnung gewährleistet eine lineare, im Wesentlichen parallel zur Rotationsachse der Wickeltrommel relativ zum Träger erzwungene Führung des Verlegearms relativ zum Träger. Trägerseitig ist die Schiene ausgebildet, während verlegearmseitig der Schlitten realisiert ist. Die Rückstelleinrichtung ist zwischen dem Schlitten und der Schiene geschaltet, so dass an dem Schlitten und an der Schiene die entsprechenden Kraftübertragungsstellen der Rückstelleinrichtung angeordnet sind. An dem Schlitten ist das Verlegeschwert des Verlegearms befestigt, während an der Schiene des Trägers das Handhabegerät angreift, um das Nachjustieren des Trägers gegenüber dem Verlegearm bereitzustellen.
- Bei einer bevorzugten Ausführung der Erfindung ist das wickeltrommelseitige Ende derart gelagert, dass zumindest bei einem Teil, vorzugsweise für die Gesamtheit der Hin- und Herverlegebewegung insbesondere bis auf den Verlegerichtungswechsel das wickeltrommelseitige Ende unter Bildung eines im Wesentlichen axialen Lateralkontakts mit einer freien Lateralseite der zuletzt auf der Wickeltrommel gewickelten Wickelungsschlaufe durch die sich axial ausdehnende Wickelungslage längs des Verlegewegs vorangetrieben wird. Auf diese Weise ist ein für die Automatisierung benötigtes korrektiv flexibles Verhalten des Verlegearms realisiert, das dem manuellen Manipulieren einer erfahrenen Bedienperson bereits sehr nahe kommt, wodurch insbesondere geometrische Unwuchten der Wickeltrommel oder der Wickelung einen automatisierten Wickelungsvorgang nicht beeinträchtigen. Das wickeltrommelseitige Ende ist vorzugsweise durch ein am Verlegearm frei drehbar gelagertes Rad gebildet, von dem zumindest ein Teil des Seitenbereichs über den Verlegearm hinaus vorsteht, um mit der noch freien Lateralseite der zuletzt aufgewickelten Wickelungsschlaufe in Kontakt kommen zu können, und das in Rotationsrichtung lediglich von der Wickeltrommel oder von dem bereits auf der Wickeltrommel liegenden Wickelgut drehangetrieben wird. In Verlegerichtung wird das Rad durch die stetig axial wachsende Wickelungslage längs des Verlegewegs mitgenommen und axial verschoben. Das Rad rollt dabei auf der Wickeltrommel oder der bereits vollständig gelegten Wickelungslage zumindest unter dem Einfluss der Gewichtskraft des Verlegearms ab.
- Des Weiteren betrifft eine bevorzugte Ausführung der Erfindung eine Anstell- oder Freistelleinrichtung, die den Verlegearm zumindest bei der Verlegebewegung nahe dem Seitenflansch der Wickeltrommel in einem zur horizontalen Radialerstreckung des einen Seitenflansches "positiven" Anstellwinkel von dem einen Seitenflansch weg neigend anstellt und den Verlegearm im Verlauf der Hin- und Herverlegebewegung hin zum gegenüberliegenden Seitenflansch in einen "negativen" Anstellwinkel von dem anderen Seitenflansch weg geneigt schwenkt. Die Anstelleinrichtung ist vorzugsweise durch das Handhabegerät, wie dem Stellroboter, gebildet, der, um die gewünschte Schwenkbewegung um den Wickelungsschlaufenkontakt zu betreiben, den Träger stellt. Die Schwenkachse der Schwenkbewegung liegt vorzugsweise im Bereich des wickeltrommelseitigen Endes des Verlegearms. Die Schwenkstelle kann längs des Hin- und Herverlegewegs wandern. Es reicht aus, einen Freistellwinkel von 1° bis 20° einzustellen. Entsprechend dem Freistellwinkel ist auch die durch die Verlegearmlagerung definierte, verdrehbare Verlegerichtung des Verlegearms gegenüber der Axialrichtung geneigt, wobei der Neigungswinkel an den axialen Enden der Hin- und Herverlegebewegung entsprechend am größten ist und im Verlauf der Hin- und Herverlegebewegung, so wie der Freistellwinkel, abnimmt und etwa auf halbem Verlegeweg verschwindet sowie anschließend insbesondere allmählich wieder zunimmt.
- Bei einer bevorzugten Ausführung der Erfindung ist für das betriebsgemäße Stellen des Verlegearms insbesondere bei einem Richtungswechsel der Hin- und Herverlegung eine Verlegearmstelleinrichtung zum insbesondere vertikalen Positionieren des Verlegearms relativ zur Wickeltrommel vorgesehen. Die Verlegearmstelleinrichtung kooperiert mit einem Wegsensor zum Erfassen wenigstens einer vorbestimmten Position des Verlegearms längs des Verlegewegs, wobei gegebenenfalls der Wegsensor bei Erreichen der wenigstens einen vordefinierten Position die Verlegearmstelleinrichtung veranlasst, den Verlegearm um wenigstens etwa die halbe Stärke des Wickelguts, vorzugsweise um etwa eine Wickelgutstärke oder um mehr als eine Wickelgutstärke, und höchstens um ein Zweifaches der Wickelgutstärke von der Wickeltrommel weg oder von der bereits daraufgelegten Wickelungslage weg anzuheben. Die Verlegearmstelleinrichtung kann eine insbesondere vertikale Schwenklagerung für den Verlegearm aufweisen, wobei eine Schwenkachse des Verlegearms trägerseitig angeordnet ist. Die Schwenklagerung kann beispielsweise dadurch realisiert sein, dass ein wickeltrommelseitiges Verlegearmschwert relativ zu der trägerseitigen Verlegearmbasis in Vertikalrichtung verschwenkbar ist. Des Weiteren kann die Verlegearmstelleinrichtung einen Lifter zum insbesondere linearen Anheben der Schwenkachse in Vertikalrichtung aufweisen, wobei der Lifter beispielsweise durch das Handhabegerät, wie den Stellroboter, gebildet ist, das auf den Träger zugreift, um den Träger samt der Verlegearm-Schwenkachse vertikal linear anzuheben. Um das schwenkbare wickeltrommelseitige Ende beim Anheben mitzunehmen, weist die Schwenklagerung einen Anlageanschlag auf, der ein Absenken des wickeltrommelseitigen Endes des Verlegearms begrenzt. Die Schwenklagerung erlaubt einerseits einen flexiblen Kontaktablauf des wickeltrommelseitigen Endes an der bereits gelegten Wickellage und damit ein freies Konturfolgen der bereits gelegten Wickellage und deren radialer Unwuchten, andererseits begrenzt der Anlageanschlag ein Absenken des wickeltrommelseitigen Endes ausgehend von der Auflage auf die Wickelungslage um höchstens eine halbe Wickelungsgutstärke, sollte das wickeltrommelseitige Ende zwischen zwei gelegte benachbarte Wickelungsschlaufen gelangen.
- Bei einer bevorzugten Ausführung der Erfindung ist eine Wickelgut-Bremse an dem Verlegearm angeordnet, die dem Wickelgut vor dem Erreichen der Wickeltrommel eine Bremskraft mitteilt, um das Wickelgut auf Zug vorzuspannen. Die Bremskraft kann betriebsgemäß insbesondere durch eine Steuerung- und/oder Regelung eingestellt werden.
- Des Weiteren betrifft die Erfindung ein Verfahren zum Wickeln eines strangförmigen Wickelgutes in Form eines kontinuierlich extrudierten Rohres aus Kunststoff auf die Wickeltrommel. Bei dem Erfindungsgemäßen Verfahren wird das Wickelgut der rotierenden Wickeltrommel anhand einer Hin- und Herverlegebewegung des Verlegearms relativ zu einem Träger übergeben. Der Verlegearm wird in Verlegerichtung relativ zu einem Träger geführt gelagert. Bei Auslenkung des Verlegearms aus einer Montageposition relativ zum Träger wird eine in axialer Verlegerichtung gerichtete Rückstellkraft erzeugt, die gegen die auf der Wickeltrommel gelegten Wickelung wirkt.
- Das erfindungsgemäße Verfahren wird mit der erfindungsgemäßen Wickelungsvorrichtung durchgeführt.
- Weitere Ausführungsbeispiele sind in den Unteransprüchen angegeben.
- Bei einer bevorzugten Ausführung der Erfindung hat die Wickelungsvorrichtung einen am Träger beweglich gelagerten Verlegearm mit einer Aufnahme zum Annehmen des insbesondere eine Extrudierstation verlassenden Wickelguts und einem wickeltrommelseitigen Ende, an dem das Wickelgut der rotierenden Wickeltrommel bei einer insbesondere linearen Hin- und Herverlegebewegung des Verlegearms längs einer Rotationsachse der Wickeltrommel aufwickelnd übergeben werden soll. Der Träger empfängt das Wickelgut an der Aufnahme, die beispielsweise durch eine kreuzförmig angeordnete Rollenanordnung gebildet sein kann. Die Hin- und Herverlegebewegung des Verlegearms verläuft vorzugsweise rein translatorisch für jede Wickelungslage in einer Horizontalebene. Da die Wickellagen übereinander liegen, ist für jede Wickelungslage ein eigener linearer Hin- und Herverlegeweg jeweils in Vertikalrichtung um eine Wickelgutstärke versetzt realisierbar, wobei insbesondere der Hin- und Herverlegeweg nicht gemäß einer fixen Regelungsroutine starr vorgegeben ist, sondern vielmehr flexibel in Abhängigkeit von dem individuellen Wickelungsverlegeverlauf sich einstellt. Hierzu ist der Verlegearm derart an dem Träger gelagert, dass zumindest bei einem Teil der insbesondere linearen Hin- und Herverlegebewegung das wickeltrommelseitige Ende des Verlegearms unter Bildung eines Lateralkontakts mit einer freien Lateralseite der auf der Wickeltrommel gewickelten Wickelung des Wickelguts der sich axial ausdehnenden Wickelungslage folgt. Erfindungsgemäß stellt die Wickelungsvorrichtung das wickeltrommelseitige Ende nicht gemäß einer vordefinierten Regelungs-Routine, sondern stellt eine dem Wickelungszuwachs nachgebende Bewegungsfreiheit für den Verlegearm bereit, wodurch geometrische Unwuchtungen und Änderungen der Geometrie während des Wickelungsvorgangs nachgebend ausgeglichen werden können. Im Gegensatz zum Stand der Technik, in dem starre Regelungsstellsysteme eine idealgeometrische Wickeltrommel stillschweigend fordern, erreicht die erfindungsgemäße Wickelungsvorrichtung selbst dann eine Automatisierung, wenn unvorhersehbare Geometrieänderungen und Geometrieeigenschaften in Betracht gezogen werden müssen. Das wickeltrommelseitige Ende des Verlegearms kontaktiert ständig die zuletzt gelegte Wickelungsschlaufe und wird erfindungsgemäß von dieser mitgenommen, wobei vorzugsweise von dem Verlegearm eine elastische Stellkraft an dem wickeltrommelseitigen Ende gegen die zuletzt gelegte Wickelungsschlaufe wirkt, damit auch bei Unwuchten und Axial- oder Radialschlägen der Lateralkontakt zwischen der zuletzt gelegten Wickelungsschlaufe und dem wickeltrommelseitigen Ende insbesondere trägheitsbedingt nicht verloren geht.
- Es sei klar, dass das wickeltrommelseitige Ende auch einen Radialkontakt zu einem Trommelkern der Wickelungstrommel oder zu der bereits fertig gelegten Wickelungslage halten kann. Die dazu benötigten radialen Kontaktkräfte werden vorzugsweise aufgrund des Einflusses des Eigengewichts des Verlegearms mit einer entsprechenden Schwenklagerung für den Verlegearm an dem Träger realisiert.
- Bei einer bevorzugten Ausführung der Erfindung ist der Verlegearm derart an dem Träger gelagert, dass das wickeltrommelseitige Ende für einen Wechsel der Richtung der Hin- und Herverlegebewegung, insbesondere bei der Bildung einer nächsten Wickelungslage, den Kontakt zu der Wickelung vorläufig verliert und so lange kontaktlos zur Wickelung verbleibt, bis das wickeltrommelseitige Ende unter Bildung des erneuten Lateralkontakts von der freien Lateralseite der sich neu bildenden, ersten Wickelungsschlaufe in axialer Verlegebewegungsrichtung mitgenommen wird. Lediglich an den beiden axialen Enden des Verlegebewegungswegs ist der ständige Kontakt zwischen dem wickeltrommelseitigen Ende und der Wickelungslage und/oder dem Trommelkern aufgehoben.
- Bei einer bevorzugten Ausführung der Erfindung folgt das wickeltrommelseitige Ende der axialen Ausdehnung der Wickelungslage nachgebend insbesondere kontinuierlich, indem eine elastische Rückstell- oder Vorspannkraft einer Rückstell- oder Vorspanneinrichtung das wickeltrommelseitige Ende gegen die Lateralseite der zuletzt gelegten Wickelungsschlaufe drückt. Dabei ist die elastische Rückstellkraft derart im Wesentlichen in Axialrichtung, insbesondere parallel zur Rotationsachse der Wickeltrommel, gerichtet, dass die im Wesentlichen ausschließlich seitliche Kräfte von dem wickeltrommelseitigen Ende in die zuletzt gelegte Wickelungsschlaufe eingeleitet werden, so das die zuletzt gelegte Wickelungsschlaufe gegen deren benachbarte Wickelungsschlaufe lateral, axial vorgespannt ist. Die elastische Rückstellkraft oder Axialvorspannung gegen die zuletzt gelegte Wickelungsschlaufe wird vorzugsweise durch die Rückstelleinrichtung realisiert, die beispielsweise einen pneumatischen Aktor oder ein anderes Federsystem aufweisen kann. Die Rückstelleinrichtung kann zwischen dem Träger und dem zum Träger beweglich gelagerten Verlegearm wirken.
- Bei einer Weiterbildung der Erfindung hat das wickeltrommelseitige Ende ein an den Verlegearm frei drehbar gelagertes Eingriffsrad. Die Lagerung des Eingriffsrads soll frei jeglicher sonstiger Antriebskräfte sein, sondern soll lediglich in eine Drehbewegung versetzt werden, wenn es in Kontakt mit der Wickeltrommel oder lateral mit einer bereits gelegten Wickelungslage kommt. Das Eingriffsrad kann eine verlegearmbezogen ortsfeste Drehachse aufweisen, die im Wesentlichen parallel oder leicht geneigt zur Rotationsachse der Wickeltrommel angeordnet sein kann. Um einen Schleifkontakt zwischen dem Verlegearm und einem Seitenflansch der Wickeltrommel zu vermeiden, kann der Verlegearm entsprechend einem Anstellwinkel zur sich radial erstreckenden Innenseite des Seitenflansches geneigt sein. In diesem Fall fällt die Drehachse des Eingriffsrads nicht mit der Rotationsachse der Wickelungstrommel zusammen, sondern ist um einige Grad geneigt.
- Bei einer bevorzugten Ausführung der Erfindung hat das Eingriffsrad eine umlaufende zylindrische Abrollfläche, die an dem zylindrischen Trommelkern der Wickeltrommel oder an einer auf der Wickeltrommel bereits gelegten Wickelungslage abläuft. Dabei drückt die Abrollfläche des Eingriffsrads unter dem Einfluss der Eigengewichtskraft des in Vertikalrichtung schwenkbar an dem Träger gelagerten Verlegearms auf den Trommelkern oder die Wickelungslage.
- Vorzugsweise ragt das Eingriffsrad abschnittsweise derart über das wickeltrommelseitige Ende vor, dass ein unbelegter, frei zugänglicher, lateraler Seitenbereich gebildet ist, der vorzugsweise bei einem scheibenförmigen Eingriffsrad eine glatte, in einer Vertikalebene liegende, ebene Fläche ist. An dem Seitenbereich wird das Eingriffsrad unter dem Einfluss der axialen Rückstellkraft gegen die freie radiale Lateralseite der zuletzt gelegten Wickelungsschlaufe gedrückt. Der frei zugängliche Seitenbereich des Eingriffsrads kann derart bemessen sein, dass die Lateralseite des Wickelguts unter Ausbildung des Lateralkontakts ausschließlich mit dem Seitenbereich in Eingriff kommt. Die Lauffläche des Eingriffsrads kommt mit der radial darunter liegenden Wickelungslage oder dem Trommelkern in Rolleingriff.
- Bei einer bevorzugten Ausführung der Erfindung ist der Verlegearm derart an dem Träger gelagert, dass sich das wickeltrommelseitige Ende längs eines linearen Eingriffswegs am Außenumfang des Wickeltrommelkerns oder an einer zuletzt an der Wickelungstrommel gelegten Wickelungslage entsprechend der allmählich axial zunehmenden Ausdehnung der zu legenden Wickelungslage um die Wickelgutstärke schrittweise verrückt. Der Eingriffsweg kann vorzugsweise im Wesentlichen an einer 12-Uhr-Umfangsposition liegen, um die Gewichtskräfte des Eigengewichts des Verlegearms am effektivsten zu nützen. Vorzugsweise liegt der Verlegearm tangential auf dem Eingriffsweg unter dem Einfluss seines Eigengewichts auf.
- Bei einer bevorzugten Ausführung der Erfindung hat der Verlegearm die Form eines Schwerts. Der Schaft des Schwerts liegt trägerseitig, während die Spitze des Schwerts hin zur Wickeltrommel ragt. Die Spitze des Schwerts liegt im ständigen Kontakt mit der Wickelungstrommel oder der bereits gelegten Wickelungslage zumindest bei der Hin- und Herverlegebewegung.
- Der Verlegearm kann durch zwei im Wesentlichen parallele Platten gebildet sein, deren Längsrichtung sich hin zur Wickeltrommel erstreckt und deren Breitenrichtung in Vertikalrichtung ausgerichtet ist. Die parallelen Platten können einen Führungsraum oder -spalt zwischen sich bilden, in dem das Wickelgut innerhalb des Verlegearms hin zum wickeltrommelseitigen Ende geführt ist. Die Führung des Wickelguts innerhalb des Verlegearms kann vorzugsweise durch wenigstens eine insbesondere frei laufende Rolle und/oder durch wenigstens ein insbesondere frei laufendes Rollenpaar gebildet sein. Die Rolle und/oder das Rollenpaar können an den Platten drehgelagert sein.
- Vorzugsweise ist an dem wickeltrommelseitigen Ende ein Abgabenrollenpaar vorzugsweise frei drehbar gelagert, über die das Wickelgut den Verlegearm verlässt, um im Verlauf zur Wickeltrommel ohne Beeinflussung einer weiteren mechanischen Struktur wie das Eingriffsrad, gewickelt zu werden.
- Gemäß der Erfindung hat die Träger-Verlegearm-Lagerung eine Schlitten-Schienen-Anordnung, durch die der Verlegearm insbesondere im Wesentlichen parallel zu einer Rotationsachse der Wickeltrommel relativ zum Träger geführt ist. Am Träger sind die Schienen und am Verlegearm der Schlitten befestigt, wobei die Rückstelleinrichtung zwischen dem Schlitten und der Schiene wirkt. Die Rückstelleinrichtung dient dazu, eine elastische Federkraft zu erzeugen, um das wickeltrommelseitige Ende gegen die zuletzt gelegte Wickelschlaufe vorzuspannen.
- Bei einer bevorzugten Ausführung der Erfindung umfasst die erfindungsgemäße Wickelungsvorrichtung eine Verlegearmlagerung, die den Verlegearm in einer insbesondere je nach axialer Position längs des Verlegewegs verdrehbaren Verlegerichtung relativ zum Träger insbesondere linear führt, und eine Rückstell- oder Vorspanneinrichtung, die bei Auslenkung des Verlegearms in Verlegerichtung relativ zu dem Träger dem Verlegearm eine Rückstell- oder Vorspannkraft mitteilt, um den Verlegearm seitlich, im Wesentlichen axial gegen eine zuletzt auf die Wickelungstrommel gelegte Wickelungsschlaufe zu drängen. Die Verlegearmlagerung kann eine Schlitten-Schienen-Anordnung aufweisen, gemäß der der Verlegearm relativ zum Träger linear in Verlegerichtung geführt ist. Die Axialrichtung ist durch die Rotationsachse der Wickeltrommel definiert. Die verdrehbare Verlegerichtung kann gegenüber der Axialrichtung insbesondere abhängig von der Position des Verlegearms längs des Verlegewegs parallel liegen und/oder dazu geneigt sein, um einen Freistellwinkel des Verlegearms insbesondere von weniger als 20° bezüglich der horizontalen Radialerstreckung des Seitenflansches der Wickeltrommel zu erzeugen. Der Schlitten ist verlegearmseitig ausgebildet, wobei die Schiene trägerseitig realisiert ist. Ein Handhabegerät in Form eines Stellroboters rückt den Träger, dem Verlegearm folgend, nach und dient dazu, die anwachsende Auslenkung des Verlegearms zu verringern, die durch das axiale Wachstum der Wickelungslage veranlasst ist und dem nachrückenden Träger gegenüber stets voreilend passiert. Die Rückstellkraft dient dazu, den Verlegearm ständig gegen die zuletzt gelegte Wickelungsschlaufe zu drücken und insbesondere dann eine Vorspannung gegen die Wickelungsschlaufe und damit den Wickelungsschlaufenkontakt aufrecht zu erhalten, wenn das Handhabegerät den Träger dem Verlegearm folgend nachführt. Der Träger darf nur soweit nachgeführt werden, dass weiterhin eine ausreichende Vorspannkraft an dem Verlegearm gegen die zuletzt gelegte Wickelungsschlaufe verbleibt. Je höher die Auslenkung des Verlegearms relativ zum Träger ist, desto stärker wirkt die Rückstellkraft der Rückstelleinrichtung. Mit diesem Erfindungsaspekt wird eine optimal kompakte, dichte Anordnung von Wickelungsschlaufe zu Wickelungsschlaufe realisiert.
- Des Weiteren betrifft eine bevorzugte Ausführung der Erfindung eine Anstell- oder Freistelleinrichtung, die den Verlegearm zumindest bei der Verlegebewegung nahe dem Seitenflansch der Wickeltrommel in einem zur horizontalen Radialerstreckung des einen Seitenflansches "positiven" Anstellwinkel von dem einen Seitenflansch weg neigend anstellt und den Verlegearm im Verlauf der Hin- und Herverlegebewegung hin zum gegenüberliegenden Seitenflansch in einen "negativen" Anstellwinkel von dem anderen Seitenflansch weg geneigt schwenkt. Die Anstelleinrichtung ist vorzugsweise durch das Handhabegerät, wie den Stellroboter, gebildet, der, um die gewünschte Schwenkbewegung um den Wickelungsschlaufenkontakt zu betreiben, den Träger stellt. Die Schwenkachse der Schwenkbewegung liegt vorzugsweise im Bereich des wickeltrommelseitigen Endes des Verlegearms. Die Schwenkstelle kann längs des Hin- und Herverlegewegs wandern. Es reicht aus, einen Freistellwinkel von 1° bis 20° einzustellen. Entsprechend dem Freistellwinkel ist auch die durch die Verlegearmlagerung definierte, verdrehbare Verlegerichtung des Verlegearms gegenüber der Axialrichtung geneigt, wobei der Neigungswinkel an den axialen Enden der Hin- und Herverlegebewegung entsprechend am größten ist und im Verlauf der Hin- und Herverlegebewegung, so wie der Freistellwinkel, abnimmt und etwa auf halbem Verlegeweg verschwindet sowie anschließend insbesondere allmählich wieder zunimmt.
- Bei einer bevorzugten Ausführung der Erfindung ist für das betriebsgemäße Stellen des Verlegearms insbesondere bei einem Richtungswechsel der Hin- und Herverlegung eine Verlegearmstelleinrichtung zum insbesondere vertikalen Positionieren des Verlegearms relativ zur Wickeltrommel vorgesehen. Die Verlegearmstelleinrichtung kooperiert mit einem Wegsensor zum Erfassen wenigstens einer vorbestimmten Position des Verlegearms längs des Verlegewegs, wobei gegebenenfalls der Wegsensor bei Erreichen der wenigstens einen vordefinierten Position die Verlegearmstelleinrichtung veranlasst, den Verlegearm um wenigstens etwa die halbe Stärke des Wickelguts, vorzugsweise um etwa eine Wickelgutstärke oder um mehr als eine Wickelgutstärke, und höchstens um ein Zweifaches der Wickelgutstärke von der Wickeltrommel weg oder von der bereits daraufgelegten Wickelungslage weg anzuheben. Die Verlegearmstelleinrichtung kann eine insbesondere vertikale Schwenklagerung für den Verlegearm aufweisen, wobei eine Schwenkachse des Verlegearms trägerseitig angeordnet ist. Die Schwenklagerung kann beispielsweise dadurch realisiert sein, dass ein wickeltrommelseitiges Verlegearmschwert relativ zu der trägerseitigen Verlegearmbasis in Vertikalrichtung verschwenkbar ist. Des Weiteren kann die Verlegearmstelleinrichtung einen Lifter zum insbesondere linearen Anheben der Schwenkachse in Vertikalrichtung aufweisen, wobei der Lifter beispielsweise durch das Handhabegerät in Form eines Stellroboters gebildet ist, das auf den Träger zugreift, um den Träger samt der Verlegearm-Schwenkachse vertikal linear anzuheben. Um das schwenkbare wickeltrommelseitige Ende beim Anheben mitzunehmen, weist die Schwenklagerung einen Anlageanschlag auf, der ein Absenken des wickeltrommelseitigen Endes des Verlegearms begrenzt. Die Schwenklagerung erlaubt einerseits einen flexiblen Kontaktablauf des wickeltrommelseitigen Endes an der bereits gelegten Wickellage und damit ein freies Konturfolgen der bereits gelegten Wickellage und deren radiale Unwuchten, andererseits begrenzt der Anlageanschlag ein Absenken des wickeltrommelseitigen Endes ausgehend von der Auflage auf die Wickelungslage um höchstens eine halbe Wickelungsgutstärke, sollte das wickeltrommelseitige Ende zwischen zwei gelegte benachbarte Wickelungsschlaufen gelangen.
- Bei einer bevorzugten Ausführung der Erfindung ist eine Wickelgut-Bremse an dem Verlegearm angeordnet, die dem Wickelgut vor dem Erreichen der Wickeltrommel eines Bremskraft mitteilt, um das Wickelgut auf Zug vorzuspannen. Die Bremskraft kann betriebsgemäß insbesondere durch eine Steuerung- und/oder Regelung eingestellt werden.
- Weitere Eigenschaften, Merkmale und Vorteile der Erfindung werden durch die folgende Beschreibung einer bevorzugten Ausführung der Erfindung anhand der beiliegenden Zeichnungen erläutert, in denen zeigen:
- Figur 1
- eine perspektivische Ansicht einer Vorrichtung zum Wickeln eines kontinuierlich extrudierten Kunststoffrohres auf eine Wickeltrommel in einem Anfangsbetriebszustand, bei dem eine erste Wickellage an der Wickeltrommel abgelegt wird;
- Figur 2a
- eine perspektivische Ansicht der Wickelungsvorrichtung gemäß
Figur 1 kurz vor dem Betriebszustand eines Wickelungslegerichtungswechsels; - Figur 2b
- eine perspektivische Detailansicht des Eingriffs eines wickeltrommelseitigen Endes eines Verlegearms auf die Wickelung und die Wickelungstrommel gemäß dem Betriebszustand nach
Figur 2a ; - Figur 3a
- eine perspektivische Ansicht der Wickelungsvorrichtung während des Betriebszustands des Wickelungslegerichtungswechsels;
- Figur 3b
- eine perspektivische Detailansicht des wickeltrommelseitigen Endes des Verlegearms gemäß dem Betriebszustand nach
Figur 3a ; - Figur 4a
- eine perspektivische Ansicht der Wickelvorrichtung in dem Betriebszustand nach dem Wickelungslegerichtungswechsel;
- Figur 4b
- eine perspektivische Detailansicht des wickeltrommelseitigen Endes des Verlegearms gemäß dem Betriebszustand nach
Figur 4a ; - Figur 5
- eine perspektivische Ansicht der Wickelungsvorrichtung mit Bewegungsachsen eines Trägers der Wickelungsvorrichtung sowie des Verlegearms;
- Figur 6
- eine Draufsicht der Wickelungsvorrichtung im Betriebszustand des Wickelungslegerichtungswechsels gemäß
Figuren 3a und3b ; - Figur 7
- eine perspektivische Draufsicht des Trägers der Wickelungsvorrichtung gemäß
Figur 1 ; - Figur 8
- eine perspektivische Seitenansicht des Trägers gemäß
Figur 7 ; - Figur 9
- eine weitere perspektivische Ansicht des Trägers nach
Figur 7 mit Blick auf eine Wirbelstrombremse für das Wickelgut in einem passiven Betriebszustand; und - Figur 10
- die perspektivische Seitenansicht des Trägers nach
Figur 7 mit der Wirbelstrombremse in einem aktiven Betriebszustand. - In
Figur 1 ist die erfindungsgemäße Wickelungsvorrichtung im Allgemeinen mit der Bezugsziffer 1 versehen. Die Wickelungsvorrichtung 1 dient dazu, ein von einer nicht näher dargestellten Extrudierstation kontinuierlich extrudiertes Kunststoffrohr 3, wie ein sogenanntes Kabelschutzrohr, auf eine Wickeltrommel 5 aufzuwickeln, wobei eine möglichst gleichmäßige Wickelung ohne Zwischenraum zwischen den einzelnen Wickelungsschlaufen 17 und mit im Wesentlichen konstanter Wickelsteigung einer Kunststoffrohrbreite pro Umdrehung erreicht werden soll, wie es beispielsweise in denFiguren 1 bis 4b dargestellt ist. - Die Wickeltrommel 5 umfasst einen im Wesentlichen zylindrischen Trommelkern 7, an dessen beiden Axialenden jeweils ein seitlicher, sich in Radialrichtung erstreckender Seitenflansch 11a, 11b befestigt ist. Konzentrisch zur Rotationssymmetrie der Wickeltrommel 5 ist eine Rotationsachse 13 der Wickeltrommel 5 ortsfest (bezüglich einem Referenzboden B, auf dem die Wickelungsvorrichtung 1 steht) gelagert, um welche die Wickeltrommel 5 zum Durchführen des Wickelungsvorgangs rotiert. Die Rotationsachse 13 definiert eine Axialrichtung, auf die auch im Folgenden zur Definition von Bewegungen von beweglichen Bauteilen der Wickelungsvorrichtung 1 Bezug genommen wird.
- Aus ökonomischen Gründen ist die genormte Wickeltrommel 5 häufig aus Holz gefertigt, wobei der Trommelkern 7 sowie auch die Seitenflansche 11a, 11b leicht, aber nicht vernachlässigbar von einer idealsymmetrischen Form abweichen können. Der zylindrische Trommelkern 7 kann Radialschläge aufweisen, während die Seitenflansche 11a, 11b Axialunwuchten bilden können. Auch Wickeltrommeln 5 aus anderem Material, wie Kunststoff, weichen häufig zufällig oder fertigungsbedingt von einer idealsymmetrischen Rotationsform ab.
- Wie in
Figur 1 dargestellt, ist das extrudierte Kunststoffrohr 3 in einer Anfangswickelungslage bereits um mehr als die axiale Hälfte der Wickeltrommel 5 um den Trommelkern 7 gewickelt. Im Folgenden soll die gerade zuletzt auf den Trommelkern 7 aufgebrachte Wickelungsschlaufe mit der Bezugsziffer 17 versehen sein. Die Wickelungsschlaufe 17 hat, bis die nächste Wickelungsschlaufe vollständig umlaufend gelegt ist und sich seitlich angelegt hat, eine umfangsabschnittsweise freie axiale Lateralseite 18, auf die im Folgenden vor allem an einer etwa 12-Uhr-Umfangs-Stelle (Kontakt mit Eingriffsrad 43) Bezug genommen werden soll. - Das Kunststoffrohr 3 ist längs seiner Erstreckung kontinuierlich zylindrisch extrudiert und kann einen Außendurchmesser von 5 mm bis 30 mm oder 40 mm aufweisen. Die Stärke des Kunststoffrohrs 3 kann bei etwa 10% bis 60% des Außenrohrradius liegen. Das Kunststoffrohr 3 wird kontinuierlich in einer Extrudierstation (nicht dargestellt) geformt und gelangt über eine Kühlstraße (Wasserbad) in die Wickelungsvorrichtung 1, der ein Kunststoffrohr-(3)-Puffersystem (nicht dargestellt) vorgeschaltet sein kann, durch das unterschiedliche Förder-Geschwindigkeiten des Kunststoffrohrs 3 in dessen Längsrichtung beim Extrudiervorgang sowie beim Wickeln ausgeglichen werden sollen. Das nicht dargestellte Puffersystem kann beispielsweise als ein Vertikalpendel ausgeführt sein, der durch die vertikale Verschiebbarkeit eines Umlenkrads eine zu geringe/zu hohe Geschwindigkeit der Wickelungsvorrichtung 1 gegenüber der Extrudiervorrichtung ausgleichen kann, indem das Umlenkrad eine höhere/niedrigere vertikale Position einnimmt. Auf diese Weise kann eine Pufferstrecke für das extrudierte Kunststoffrohr (3) für einen kontinuierlichen Fertigungsprozess erreicht werden, bevor es in die Wickelungsvorrichtung 1 gelangt.
- Die erfindungsgemäße Wickelungsvorrichtung 1 besteht im Wesentlichen aus vier Hauptbestandteilen, nämlich einem Träger 23, einem Verlegearm 27, einer Rückstelleinrichtung 61 sowie einem lediglich in
Figur 5 angedeuteten Stellroboter 71. - Der Verlegearm 27 hat eine Form wie eine Motorsäge mit einer Verlegearmbasis 28 (Aktoren-/ Motorbasis) sowie einem Verlegeschwert 29, das sich von der Verlegearmbasis 28 im Wesentlichen in Horizontalrichtung zur Wickeltrommel 5 erstreckt und diese unmittelbar oder mittelbar berührt. Die Verlegearmbasis 28 hat auf deren der Wickeltrommel 5 abgewandten Stirnseite eine Aufnahme 21 (
Figuren 6 ,9 und10 ) zum Annehmen des insbesondere eine Extrudierstation kontinuierlich verlassenden Kunststoffohrs 3. Die Aufnahme 21 umfasst sternförmig angeordnete Laufrollenpaare 25, die eine Einfädelöffnung begrenzen, um ein horizontal und vertikal geführtes Einfädeln des Kunststoffrohrs 3 in den Verlegearm 27 zu gewährleisten. Die Verlegearmbasis 28 ist hauptsächlich durch einen Profilträger 57 gebildet, der aus mehreren aneinander gefügten Tragplatten zusammengesetzt ist. An den Tragplatten können Funktionskomponenten der Wickelungsvorrichtung 1, wie ein Mikrorechner, Aktoren, etc., angebracht werden. - Der Träger 23 hält beweglich den Verlegearm 27 und hat in der dargestellten Ausführung eine Schiene 51, an der ein Greifarm des Stellroboters 71 befestigt ist. Die Schiene 51 kooperiert mit einem Schlitten 53 der Verlegearmbasis 28 derart, dass der Verlegearm 27 längs des linearen Schlittenwegs hin- und herbewegt werden kann.
- Das Verlegeschwert 29 erstreckt sich überwiegend in einer Horizontalrichtung, ungefähr senkrecht zur Axialrichtung 13 von der Verlegearmbasis 28 weg hin zur Wickeltrommel 5, wobei der Verlegearm 27 derart dimensioniert ist, dass er in dessen Längsrichtung über den Trommelkern 7 (bis etwa in dessen axiale Mitte) ragt (in Anheberichtung A betrachtet).
- Das Verlegeschwert 29 hat zwei vertikale, parallel zueinander angeordnete Führungs- und Halteplatten 31a, 31b. Zwischen den beiden Halte- und Führungsplatten 31a, 31b, die in deren im Wesentlichen horizontalen Erstreckungsrichtung eine im Wesentlichen konstante Vertikalbreite aufweisen, ist ein Führungsspalt für das Kunststoffrohr 3 geformt. Damit das Kunststoffrohr 3 sicher von der Aufnahme 21 entlang des Verlegearms 27 zwischen den Halte- und Führungsplatten 31a, 31b entlang gleiten kann, können Leitrollen im Führungsspalt an den Halte- und Führungsplatten 31a, 31b drehbar gelagert sein und einen ortsdefinierten Führungskanal durch den Führungsspalt hindurch bilden.
- An einem wickeltrommelseitigen Ende 33 des Verlegearms 27 ist ein Paar Abgaberollen 35 mit horizontalen Drehachsen noch im Führungsspalt gelagert, die ein geführtes Abgeben des Kunststoffrohres 3 von dem wickeltrommelseitigen Ende 33 des Verlegearms 27 hin zur Wickeltrommel 5 sicherstellen.
- An einer Oberseite des wickeltrommelseitigen Endes 33 ist ein Wegsensor in Form eines Kontaktgebers 37 positioniert. Der Kontaktgeber 37 umfasst ein frei drehbar gelagertes Kontaktrad, dessen Drehachse vertikal angeordnet ist. Auch eine andere aus dem Stand der Technik bekannte Wegsensorik kann eingesetzt werden. Das Kontaktrad hat einen passiven Betriebszustand im Verlauf der Verlegebewegung W des Verlegearms 27 zwischen dem linken Seitenflansch 11b und dem gegenüberliegenden rechten Seitenflansch 11a, bei dem die Drehachse in einem Führungsspalt des Verlegeschwerts 29 liegt. Sobald das Kontaktrad des Kontaktgebers 37 in Eingriff mit der radialen Innenseite 41 des jeweiligen Seitenflansches 11a, 11b gelangt, so wird das Kontaktrad, insbesondere dessen vertikale Drehachse, in Axialrichtung ausgelenkt, weil das Kontaktrad an dem wickeltrommelseitigen Ende 33 des Verlegearms 27 in beiden Axialrichtungen axial vorsteht und für eine axiale Auslenkung schwenkbar am Verlegearm 27 gelagert ist. Beim axialen Auslenken des Kontaktrads gibt der Kontaktgeber 37 ein elektrisches Kontaktsignal an eine nicht näher dargestellte Steuerungs- und/oder Regelungseinrichtung, welche das Kontaktsignal für den weiteren Wickelbetrieb der Wickelungsvorrichtung 1 verarbeitet.
- An der der Oberseite gegenüberliegenden Unterseite des wickeltrommelseitigen Endes 33 ist ein Eingriffsrad 43 frei drehbar am Verlegearm 27 ortsfest gelagert, dessen Drehachse im Wesentlichen horizontal parallel zur Rotationsachse 13 der Wickeltrommel 5 liegt. Die Lauffläche des Eingriffsrads 43 steht im unmittelbaren Abrollkontakt mit dem angetriebenen Trommelkern 7 oder einer bereits gelegten Wickelungslage. Ein frei zugänglicher Seitenbereich des Eingriffsrads 43 liegt beim Wickeln mit einem überwiegend axialen Druckvorspannkontakt an der axialen Lateralseite 18 der zuletzt gelegten Wickelungsschlaufe 17 an.
- Die axiale Breite der Lauffläche des Eingriffsrads 43 ist derart dimensioniert, dass sie größer als der halbe Außendurchmesser des Kunststoffrohrs 3, allerdings kleiner als der Außendurchmesser des Kunststoffrohrs 3 ist.
- Der Verlegearm 27 ist über eine trägerseitige-(23)-Schwenklagerung, welche nicht näher illustriert ist, vertikal schwenkbar gelagert, wobei eine trägerseitige Schwenkachse S horizontal, zumindest abhängig von der Verlegewegposition parallel zur Rotationsachse 13 der Wickeltrommel 5 verläuft. Zum Kontrollieren der Schwenkbewegung des Verlegearms 27 in einer vertikalen Ebene ist eine Dämpfungseinheit 45 vorgesehen, die einerseits am Träger 23 und andererseits an einem Vorsprung 47 an der Oberseite des Verlegeschwerts 29 befestigt ist. Die Dämpfungseinheit 45 gewährleistet eine gedämpfte Schwenkbewegung des Verlegearms 27 um die trägerseitige Schwenkachse S. Ein Schwenkanschlag (nicht dargestellt) ist vorgesehen, der ein Abschwenken des Verlegearms 27 in der vertikalen Ebene nach unten auf die Wickeltrommel 5 zu begrenzt. Der Schwenkanschlag gewährleistet, dass sich das Eingriffsrad 43 nicht zwischen zwei bereits gelegten Wickelungsschlaufen drängt und sich vollständig zwischen diesen durchdrückt, um einen Kontakteingriff des Eingriffsrads 43 mit einer darunter liegenden vollständigen Wickelungslage zu vermeiden. Die Schwenkbeweglichkeit des Verlegearms 27 und die Position des Schwenkanschlags sind relativ zum Verlegearm 27 derart festgelegt, dass das Eingriffsrad 43 bei der Hin- und Herverlegebewegung in Abrollkontakt mit dem zylindrischen Trommelkern 7 oder der zuletzt gelegten Wickelungslage steht. Der Schwenkanschlag stoppt aber ein Absenken der Eingriffsrolle 43 ab höchstens der halben Stärke des Kunststoffrohrs 3, so dass ein Rollkontakt auf der zuletzt vollständig verlegten Wickelungslage verhindert wird.
- Der Träger 23 ist relativ zur ortsfesten Rotationsachse 13 oder zum ortsfesten Referenzboden B einer Fertigungshalle verlagerbar, indem ein der Stellroboter 71, der ortsfest auf dem Referenzboden B montiert ist, den Träger 23 greift, hält und entsprechend dem Wickelvorgang steuerungsgemäß positioniert.
- In
Figur 5 sind teilweise die Bewegungsachsen des Stellroboters 71 dargestellt, wobei der Stellroboter 71 den Träger 23 in Horizontalrichtung, die der Axialrichtung (Rotationsachse 13) und im Wesentlichen der Verlegerichtung V entspricht, und in Anheberichtung A linear bewegen kann und wobei der Stellroboter 71 den Träger 23 um den Lateralkontakt K (um die Drehachse D) schwenken kann. - Die Eingriffsstelle des Eingriffsrads 43 mit dem Trommelkern 7 oder der bereits gelegten Wickelungslage bildet eine Betätigungsstelle, an der der Verlegearm 27 durch den axialen Zuwachs der Wickelungslage 15 dem Träger 23 gegenüber voreilend axial verschoben wird. Dies kann als eine flexibel reagierende Folgebewegung des Verlegearms 27 bezeichnet werden, der dem kontinuierlichen axialen Verlegen der Wickelungsschlaufen 17 und dem axialen Wachsen der Wickelungslage 15 unmittelbar folgt. Eine vertikale Schwenkbewegung um die Schwenkachse S wegen der Anlage des Eingriffsrads 43 an der Wickeltrommel 5 und einem radialen Wachsen der Wickelungslagen realisiert ein Folgenachstellen des an dem vorerst ortsfesten Träger 23 gelagerten Verlegearms 27. Die Nachgebebewegung des Verlegearms 27 und die Nachstellbewegung des Trägers 23 sind mit den Doppelpfeilen V, A in
Figur 5 angedeutet. - Der Stellroboter 71 hält den Träger 23 anhand der Schiene 51, die mit dem Schlitten 53 kooperiert, der aus einer Basisplatte 55 und einem sich davon nach unten erstreckenden Profilträger 57 gebildet ist. Der Schlitten 53 und die Schiene 51 bilden eine translatorische Lagerung, deren translatorische Verlegerichtung V im Wesentlichen oder annähernd parallel zur horizontalen Axialrichtung (Rotationsachse 13) festgelegt ist. Die Schlitten(53)-Schienen(51)-Anordnung verleiht dem Verlegearm 27 eine Bewegungsfreiheit gegenüber dem Träger 23 nur in der Verlegerichtung V, so dass der Schlitten 53 nur in Verlegerichtung V relativ zu dem Stellroboter 71, insbesondere dessen Greifarm (nicht dargestellt), verlagert werden kann.
- Die Schienen(51)-Schlitten(53)-Anordnung stellt eine axiale Nachgiebigkeit für den Verlegearm 27 bereit. Die axiale Nachgiebigkeit wird durch den Bewegungsfreiheitsgrad in Verlegerichtung V geschaffen. Damit das Eingriffsrad 43 bei dem Verlegevorgang zwischen den beiden Seitenflanschen 11a, 11b nicht den Kontakt zu der Lateralseite der zuletzt gelegten Wickelungsschlaufe 17 verliert, wirkt zwischen dem Schlitten 53 und der Schiene 51 eine Rückstell- oder Vorspanneinrichtung 61, welche eine elastische Rückstell- oder Vorspannkraft erzeugt, sobald der Verlegearm 27 aus einer vordefinierten Neutralposition relativ zum Träger 23, in der keine Rückstellkräfte der Rückstelleinrichtung 61 zwischen der Schiene 51 und dem Schlitten 53 wirken, in Verlegerichtung V, getrieben durch das axiale Ausdehnen der Wickelungslage 15, ausgelenkt wird. Dabei ist der Betrag der Rückstellkraft desto größer, je größer die Auslenkweite des Verlegearms 27 aus der Neutralposition ist. Die Rückstelleinrichtung 61 ist durch ein Paar pneumatische Aktoren 63, 65 gebildet, deren Details in den
Figuren 7 bis 10 angedeutet sind. Ein pneumatischer Aktor 65 oder 63 ist für die Erzeugung der Rückstellkraft nur in einer der Verlegerichtungen V (beispielsweise von dem Seitenflansch 11a zum Seitenflansch 11b) aktiv, während der andere pneumatische Aktor (65 oder 63) in der entgegengesetzten Verlegerichtung V (von dem Seitenflansch 11b zum Seitenflansch 11a) aktiv ist. - Wird der Verlegearm 27 durch das periodische, horizontale Verlegen der Wickelungsschlaufe 17 in Verlegerichtung V verrückt, so verlagert sich das Ende 33 des Verlegearms 27 samt Schlitten 53 in linearer Verlegerichtung V relativ zur Schiene 51, die währenddessen unbeeinflusst ortsfest vorläufig in deren Position verbleibt, bis sie beispielsweise bei Überschreitung einer Auslenkschwelle des Schlittens 53 durch den Stellroboter 71 nachgestellt wird, was die Rückstellkraft der Rückstelleinrichtung vermindert. Aufgrund der Relativbewegung zwischen dem Schlitten 53 und der Schiene 51 wird der pneumatische Aktor 63 oder 65 (je nach axialer Verlegerichtung) pneumatisch gespannt, so dass in dem pneumatischen Aktor 63, 65 die pneumatisch elastische Rückstellkraft erzeugt ist, die über den Schlitten 53 dem Verlegearm 27 mitgeteilt wird und schließlich das Eingriffsrad 43 axial gegen die freie Lateralseite 18 der zuletzt gewickelten Wickelschlaufe 17 vorspannt. Mit der axialen Rückstell-Vorspannung ist gewährleistet, dass sämtliche Wickelungsschlaufen 17 in Axialrichtung dicht an dicht benachbart gelegt werden, um die gewünschte gleichmäßige Wickelungsfolge zu erreichen, und flexibel auf geometrische sowie materialspezifische Anomalien anpassend reagiert werden kann.
- Es sei klar, dass der pneumatische Aktor 63, 65 auch unabhängig von der Verlegung des Verlegearms 27 eine aktiv gesteuerte, pneumatische Rückstellkraft erzeugen kann, indem beispielsweise der pneumatische Aktor über eine nicht näher dargestellte Steuerungs- und/oder Regelungseinrichtung beispielsweise abhängig von einem vorbestimmten Betriebszustand pneumatisch aktiviert wird. Um einen möglichst einfachen Aufbau zu realisieren, ist der pneumatische Aktor 63 ungesteuert und baut (lediglich) elastische Rückstellkräfte auf, wenn der Verlegearm 27 aus dessen Neutralposition in Verlegerichtung V verrückt wird.
- Um die axiale Rückstellkraft, die das Eingriffsrad 43 gegen die freie Lateralseite 18 der letzten Wickelungsschlaufe 17 drückt, im Wesentlichen konstant zu halten, wird die axiale Auslenkung zwischen dem Schlitten 53 und der Schiene 51 im Wesentlichen konstant oder zumindest in einem Grenzbereich gehalten. Dafür ist ein nicht dargestellter Positionssensor eingesetzt, der mit Hilfe einer Steuerungs- und/oder Regelungseinrichtung (nicht näher dargestellt) eine vordefinierte minimale und maximale Sollauslenkamplitude überwacht. Wird diese über- bzw. unterschritten, führt der Stellroboter 71 die Schiene 51 der Auslenkbewegung des Verlegearms 27 folgend nach, wobei der Nachrückschritt in etwa einer Stärke des Kunststoffrohrs 3 entsprechen kann. Auf diese Weise wird gewährleistet, dass die elastische Rückstellkraft durch das Nachfahren der Schiene 51 um den periodischen Aufbau der Auslenkung reduziert wird.
- Um die gewünschte Wickelung um den Trommelkern 7 der Wickeltrommel 5 zu realisieren, ist das Kunststoffrohr 3 beim Aufwickeln um den Trommelkern 7 weitest möglich in dessen Längsrichtung mit einer konstanten Zugvorspannkraft beansprucht.
- Erfindungsgemäß ist an dem Träger 23, insbesondere am Schlitten 53, eine elektromagnetische Bremse, insbesondere eine Wirbelstrombremse 67, angeordnet, die aus einer aktiven Betriebsstellung, wie sie in
Figur 10 ersichtlich ist, in eine passive Betriebsstellung (sieheFigur 9 ) verbracht werden kann. Die Wirbelstrombremse 67, die gegebenenfalls von einer nicht näher gestellten Steuerungs- und/oder Regelungseinrichtung gestellt und manipuliert werden kann, dient dazu, die im Wesentlichen gleichmäßige Zugvorspannkraft dem Kunststoffrohr 3 mitzuteilen. Als Beispiel kann die Wirbelstrombremse 67 zwei Magnetrotoren aufweisen, die in einem elektromagnetisch erzeugten Magnetfeld rotieren, wobei der jeweilige Magnetrotor ein- und ausgefahren werden kann, um die elektromagnetische Bremskraft einzustellen. Um ausreichende Reibungsverzögerungskräfte in das Kunststoffrohr 3 einzuleiten, ist ein Zahnriemen 72 vorgesehen, der um zwei Umlenkrollen der Wirbelstrombremse 67 gespannt ist. Der Zahnriemen 72 hat quer verlaufende Zähne, um einen gewünschten Eingriff mit dem Kunststoffrohr 3 und die Reibungskraftübertragung zu gewährleisten. Bei einer alternativen Ausgestaltung des Riemens 72 kann auch ein in Längsrichtung verlaufendes Berg-Tal-Profil vorgesehen sein, das formkomplementär zum Kunststoffrohr 3 geformt ist. - Im Folgenden wird beschrieben, wie eine neue in Radialrichtung der Wickeltrommel 5 "erhöhte" Wickelungslage 15 initiiert ist, wenn annähernd eine Wickelungslage auf dem Trommelkern 7 oder einer bereits gelegten Wickelungslage abgeschlossen wurde und sich darauf eine "neue" Lage bildet. Hierzu wird insbesondere auf die
Figuren 2a bis 4b Bezug genommen. - In
Figur 2a und2b ist ein Betriebszustand ersichtlich, bei dem eine erste Wickelungslage 15 auf dem Trommelkern 7 annähernd fertig gestellt ist. Das Eingriffsrad 43 läuft auf dem zylindrischen Trommelkern 7 ab, wobei die von der Rückstelleinrichtung 61 erzeugte axiale Rückstellkraft die gerade zuvor gelegte Wickelungsschlaufe 17 axial gegen die benachbarte Wickelungsschlaufe drückt. Bevor nun die letzte Wickelungsschlaufe 17 der ersten Wickelungslage 15 abgeschlossen wird, gelangt das Kontaktrad des Kontaktgebers 37 in einen Rolleingriff mit der Innenseite 41 des Seitenflansches 11a. Mit Fortlauf des Wickelungsvorgangs wird das Kontaktrad horizontal ausgelenkt, wodurch das Steuersignal des Kontaktgebers 37 an eine nicht näher dargestellte Steuerungs- und/oder Regelungseinrichtung gesendet wird. Diese veranlasst nach Erhalt des Steuersignals ein vertikales Anheben des Verlegearms 27, indem der Stellroboter 71 den Träger 23 und dessen Schiene 51 in Anheberichtung A im Wesentlichen um nicht mehr als die Stärke des Kunststoffrohrs 3 anhebt, wobei der nicht näher dargestellte vertikale Schwenkanschlag den Verlegearm 27 in vertikaler Anheberichtung mitnimmt, um das wickeltrommelseitige Ende 33 des Verlegearms 27 um etwas mehr als die Außendurchmesserstärke des Kunststoffrohrs 3 über die gerade beendete Wickelungslage 15 anzuheben. Dieser Betriebszustand des angehobenen wickeltrommelseitigen Endes 33 ist in denFiguren 3a und3b ersichtlich, ebenso der ausgelenkte Kontaktgeber 37. In der axialen Endposition des wickeltrommelseitigen Endes 33 des Verlegearms 27 besteht vorübergehend kein Kontakt zwischen dem Eingriffsrad 43 und dem Kunststoffrohr 3. Durch kontinuierliches Weiterwickeln wird das Kunststoffrohr 3 in die noch verbleibende Wickelungslücke zum Seitenflansch 11a gelegt, bis sich die erste Wickelungsschlaufe der "neuen" Wickelungslage 15 bildet. Zuerst gelangt der frei zugängliche Seitenbereich des Eingriffsrads 43 in einem Lateralkontakt K mit der Lateralseite 18 der ersten Wickelungsschlaufe 17 der neu zu legenden Wickelungslage 15, wobei die Abrollfläche des Eingriffsrads 43 kurzfristig noch entfernt von der bereits fertig gelegten Wickelungslage 15 angehoben ist. Erst nachdem die erste Wickelungsschlaufe 17 das Eingriffsrad 43 in Verlegrichtung V mitnimmt, senkt sich das Eingriffsrad 43 ab, so dass dessen Abrollfläche in Rollkontakt mit der vollständig gelegten Wickelungslage 15 gelangt. Dieser Betriebszustand ist in denFiguren 4a und4b ersichtlich, bei dem das Eingriffsrad 43 einerseits in Rollkontakt mit der gerade gelegten Wickellage 15 steht, andererseits sich mit dessen unbedeckten Seitenbereich in Lateralkontakt K mit der Lateralseite 18 der ersten Wickelungsschlaufe 17 vorspannend befindet. In diesem Betriebszustand ist der Verlegearm 27 bereits wieder in Axialrichtung relativ zum Träger 23 verrückt, wodurch die Rückstelleinrichtung 61 die Rückstellkraft erzeugt, die das Eingriffsrad 43 gegen die gerade gelegte Wickelschlaufe 17 drückt. Dass der Verlegearm 27 bereits von der axialen Endposition weg ausgelenkt ist, ist auch an der Position des Kontaktsrads des Kontaktgebers 37 ersichtlich, der sich wieder in dem passiven Betriebszustand befindet und nicht mehr im Rollkontakt mit der Innenseite 41 des Seitenflansches 11a steht. - In
Figur 6 ist ersichtlich, dass der Verlegearm 27 bei seiner inFigur 6 dargestellten axialen Endstellung zu der horizontalen Radialrichtung HR in einem Anstellwinkel α geneigt ist, gemäß dem der Verlegearm 27 ausgehend von dessen wickeltrommelseitigem Ende 33 von dem rechten Seitenflansch 11a weg hin zur Wickeltrommelmitte geneigt ist. Dies stellt sicher, dass das Kontaktrad des Kontaktgebers 37 ausreichend Raum für ein Ausschwenken hat, um das Steuersignal zu erzeugen und abzugeben, ohne dass das Ende 33 des Verlegearms 27 in Kontaktkonflikt mit der Innenseite 41 des Seitenflansches 11a, 11b kommt. - Im Verlauf der axialen Verlegebewegung von dem rechten Seitenflansch 11a hin zum linken Seitenflansch 11b nimmt ein (positiver) Anstellwinkel α ab, so dass etwa in axialer Mitte der Wickeltrommel 5 die Längserstreckung des Verlegearms 27 mit der horizontalen Radialrichtung HR zusammenfällt, während der Verlegearm 27 in der gegenüberliegenden axialen Verlegeendposition in einem (negativen) Anstellwinkel α insbesondere gleicher Größe ebenfalls hin zur Mitte der Wickeltrommel 5 geneigt ist. Auch in dieser Stellung kann der Kontaktgeber 37 sicher auslösen, indem das Kontaktrad seitlich ausgeschwenkt wird.
- Bei beiden axialen Verlegeendpositionen des Verlegearms 27 tritt der sich in Radialrichtung erstreckende Seitenflansch 11a, 11b nicht in Bewegungskonflikt mit dem dazu geneigten Verlegearm 27.
-
- 1
- Wickelungsvorrichtung
- 3
- Kunststoffrohr
- 5
- Wickeltrommel
- 7
- Trommelkern
- 11a, 11b
- rechter und linker Seitenflansch
- 13
- Rotationsachse
- 13'
- Axialrichtung
- 15
- Wickelungslage
- 17
- Wickelungsschlaufe
- 18
- Lateralseite von 3
- 21
- Aufnahme
- 23
- Träger
- 25
- Laufrollenpaare
- 27
- Verlegearm
- 28
- Verlegearmbasis
- 29
- Verlegeschwert oder -lanze
- 31a, 31b
- Führungs- und Halteplatten
- 33
- wickeltrommelseitiges Ende
- 35
- Abgaberollen
- 37
- Kontaktgeber
- 41
- Innenseite
- 43
- Eingriffsrad
- 45
- Federdämpfungseinheit
- 47
- Vorsprung
- 51
- Schiene
- 53
- Schlitten
- 55
- Basisplatte
- 57
- Profilträger
- 61
- Rückstelleinrichtung
- 63, 65
- pneumatische Aktoren
- 67
- Wirbelstrombremse
- 71
- Stellroboter
- 72
- Zahnriemen
- α
- Anstellwinkel
- α'
- Neigungswinkel
- A
- Anheberichtung
- B
- Referenzboden
- D
- Drehachse
- HR
- horizontale Radialerstreckung
- K
- Lateralkontakt
- M
- Drehrichtung von 5
- S
- Schwenkachse
- V
- Verlegerichtung
- W
- Hin- und Herverlegeweg
Claims (9)
- Vorrichtung (1) zum Wickeln eines strangförmigen Wickelguts in Form eines kontinuierlich extrudierten Rohres (3) aus Kunststoff auf eine Wickeltrommel (5), dadurch gekennzeichnet, dass die Vorrichtung (1) umfasst: einen Stellroboter (71), einen Träger (23), einen am Träger (23) gelagerten Verlegearm (27), über den das kontinuierlich extrudierte Rohr (3) der rotierenden Wickeltrommel (5) bei einer Hin- und Herverlegebewegung des Verlegearms (27) aufwickelnd übergeben wird, eine Verlegearmlagerung, die den Verlegearm (27) in einer Verlegerichtung (V) relativ zum Träger (23) führt, und eine Rückstelleinrichtung (61), die bei Auslenkung des Verlegearms (27) relativ zum Träger (23) dem Verlegearm (27) eine Rückstellkraft mitteilt, um den Verlegearm (27) gegen eine zuletzt auf die Wickeltrommel (5) gelegte Wickelungsschlaufe (17) vorzuspannen, wobei zum Einstellen der Rückstellkraft die Position des Trägers (23) relativ zum sich an der gelegten Wickelschlaufe (17) abstützenden Verlegearm (27) veränderbar ist, wobei der Träger (23) mittels des Stellroboters mit drei Bewegungsachsen gestellt ist, wobei eine Steuerungs- und/oder Regelungseinrichtung ein Nachfolgen des Trägers (23) durch den Stellroboter erst dann auslöst, wenn der Verlegearm (27) einen vorbestimmten Auslenkweg entlang des Trägers (23) überschritten hat, wobei die Verlegearm-Lagerung eine Schlitten-Schienen-Anordnung aufweist, durch die der Verlegearm (27) im Wesentlichen parallel zur Rotationsachse (13) der Wickeltrommel (5) relativ zum Träger (23) linear geführt ist, wobei am Träger (23) die Schiene (51) und am Verlegearm (27) der Schlitten (53) befestigt sind, wobei Kraftübertragungsstellen der Rückstelleinrichtung (61) an dem Schlitten (53) und an der Schiene (51) angeordnet sind.
- Vorrichtung nach Anspruch 1, bei der ein wickeltrommelseitiges Ende (33) des Verlegearms (27) dazu ausgeführt ist, zumindest bei der Hin- und Herverlegebewegung in einem Lateralkontakt (K) mit einer zumindest abschnittsweise freien Lateralseite der auf der Wickeltrommel (5) zuletzt gelegten Wickelungsschlaufe (17) des kontinuierlich extrudierten Rohres (3) zu kommen.
- Vorrichtung nach Anspruch 1 oder 2, wobei die Rückstelleinrichtung (61) eine Federung umfasst, die bei Auslenkung des Verlegearms (27) aus einer Neutralposition in eine Auslenkposition eine elastische Rückstellkraft erzeugt.
- Vorrichtung nach einem der vorstehenden Ansprüche, wobei die Rückstelleinrichtung derart ansteuerbar ist, dass die Rückstellkraft während des Wickelns im Wesentlichen in einem festgelegten Grenzbereich gehalten wird, und/oder wobei die Rückstelleinrichtung (61) eine Steuerungs- und/oder Regelungseinrichtung zum Einstellen der Rückstellkraft und/oder eine Auslenksteuerung aufweist, die einen Wegsensor zum Bestimmen der Auslenkung des Verlegearms (27) aus der Neutralposition und einen Rechner umfasst.
- Verfahren zum Wickeln eines strangförmigen Wickelguts in Form eines kontinuierlich extrudierten Rohres (3) aus Kunststoff auf eine Wickeltrommel (5), wobei das Verfahren mit einer nach einem der Ansprüche 1 bis 4 ausgebildeten Vorrichtung durchgeführt wird, wobei das kontinuierlich extrudierte Rohr (3) der rotierenden Wickeltrommel (5) anhand einer Hinund Herverlegebewegung des Verlegearms (27) übergeben wird, der in Verlegerichtung relativ zu einem Träger (23) geführt gelagert wird, wobei bei Auslenkung des Verlegearms (27) aus einer Neutralposition relativ zum Träger (23) eine in Verlegerichtung (V) gerichtete Rückstellkraft erzeugt wird, die gegen die auf der Wickeltrommel (5) gelegten Wickelung wirkt.
- Vorrichtung nach einem der Ansprüche 1 bis 4, wobei der Verlegearm (27) eine Aufnahme (21) zum Annehmen des kontinuierlich extrudierten Rohres (3) und ein wickeltrommelseitiges Ende aufweist, an dem das extrudierte Rohres (3) der rotierenden Wickeltrommel (5) bei einer Hin- und Herverlegebewegung des Verlegearms (27) aufwickelnd übergebar ist, der derart an dem Träger (23) gelagert ist, dass zumindest bei einem Teil der Hin- und Herverlegebewegung das wickeltrommelseitige Ende (31) unter Bildung eines ständigen axialen Lateralkontakts (K) mit einer freien Lateralseite (18) einer zuletzt auf der Wickeltrommel (5) gewickelten Wickelungsschlaufe (17) des kontinuierlich extrudierten Rohres (3) der sich axial ausdehnenden Wickelungslage (15) folgt.
- Vorrichtung nach Anspruch 6, wobei der Verlegearm (27) derart an dem Träger (23) gelagert ist, dass das wickeltrommelseitige Ende (33) beim Wechsel der Richtung der Hin- zur Herverlegebewegung den Lateralkontakt (K) zur Wickelung verliert und solange kontaktlos zur Wickelung verbleibt, bis das wickeltrommelseitige Ende (33) unter Bildung des Lateralkontakts (K) mit der freien Lateralseite (18) in axialer Verlegebewegungsrichtung (V) von der Wickelungsschlaufe (17) mitgenommen wird, und/oder dass das wickeltrommelseitige Ende der axialen fortschreitenden Ausdehnung der Wickelungslage (15) nachgebend folgt, indem eine elastische Rückstellkraft einer Rückstelleinrichtung (61) das wickeltrommelseitige Ende (33) gegen die Lateralseite (18) drückt.
- Vorrichtung nach Anspruch 6 oder 7, wobei das wickeltrommelseitige Ende (33) ein an dem Verlegearm (27) frei drehbar gelagertes Eingriffsrad (43) aufweist und/oder eine umlaufende Abrollfläche aufweist, die an einem zylindrischen Kern (7) der Wickeltrommel (5) oder einer auf der Wickeltrommel (5) gelegten Wickelungslage (15) abläuft, und/oder das zumindest abschnittsweise derart von dem wickeltrommelseitigen Ende (33) vorsteht, dass ein unbelegter, frei zugänglicher, lateraler Seitenbereich gebildet ist, an dem das Eingriffsrad (43) sich gegen die freie Lateralseite (18) der zuletzt gelegten Wickelungsschlaufe (17) anlegt und/oder der derart bemessen ist, dass die Lateralseite (18) des kontinuierlich extrudierten Rohres (3) unter Ausbildung des Lateralkontakts (K) ausschließlich mit dem Seitenbereich in Eingriff kommt.
- Vorrichtung nach einem der vorstehenden Ansprüche 6 bis 8, wobei der Verlegearm (27) derart an dem Träger (23) gelagert ist, dass das wickeltrommelseitige Ende (33) längs eines axialen Eingriffswegs am Außenumfang eines Wickeltrommelkerns (7) oder an einer zuletzt an der Wickelungstrommel (5) gelegten Wickelungslage (15) linear wandert und/oder längs des Eingriffswegs der Verlegearm (27) zumindest unter dem Einfluss dessen Eigengewichts tangential zum Umfang der Wickeltrommel (5) aufliegt, und/oder wobei der Verlegearm (27) die Form eines Schwerts aufweist, das sich von dem Träger (23) hin zum wickeltrommelseitigen Ende (33) erstreckt, und/oder durch zwei im Wesentlichen parallelen Platten (31a, b) gebildet ist, die einen Führungsspalt zwischen sich bilden, in dem das kontinuierlich extrudierte Rohr (3) hin zum wickeltrommelseitigen Ende (33) geführt ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL13829060T PL2953876T3 (pl) | 2013-02-06 | 2013-12-20 | Urządzenie i sposób nawijania pasmowego materiału nawojowego |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201310002019 DE102013002019A1 (de) | 2013-02-06 | 2013-02-06 | Wickelungsvorrichtung für ein strangförmiges Wickelgut und Verfahren dazu |
| DE201310002022 DE102013002022A1 (de) | 2013-02-06 | 2013-02-06 | Vorrichtung zum Wickeln eines strangförmigen Wickelguts und Verfahren dazu |
| DE201310002017 DE102013002017A1 (de) | 2013-02-06 | 2013-02-06 | Wickelungsvorrichtung und -verfahren für ein strangförmiges Wickelgut |
| DE201310002023 DE102013002023A1 (de) | 2013-02-06 | 2013-02-06 | Vorrichtung und Verfahren zum Wickeln eines strangförmigen Wickelguts |
| DE102013002020.4A DE102013002020B4 (de) | 2013-02-06 | 2013-02-06 | Wickelungsvorrichtung und Wickelungsverfahren für ein strangförmiges Wickelgut |
| PCT/EP2013/003930 WO2014121812A2 (de) | 2013-02-06 | 2013-12-20 | Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2953876A2 EP2953876A2 (de) | 2015-12-16 |
| EP2953876B1 true EP2953876B1 (de) | 2020-11-11 |
Family
ID=50101852
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13829060.6A Active EP2953876B1 (de) | 2013-02-06 | 2013-12-20 | Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP2953876B1 (de) |
| DK (1) | DK2953876T3 (de) |
| ES (1) | ES2851573T3 (de) |
| HU (1) | HUE053166T2 (de) |
| PL (1) | PL2953876T3 (de) |
| PT (1) | PT2953876T (de) |
| WO (1) | WO2014121812A2 (de) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013109056B3 (de) | 2013-08-21 | 2014-08-14 | Graewe GmbH | Microductrohrwickler, Doppelstellenwickler, Verarbeitungssystem für Microduct-Kunststoffleerrohre und Verfahren zum Aufwickeln solcher Rohre |
| CN112141815B (zh) * | 2020-10-20 | 2022-06-07 | 湖南腾博复合材料有限公司 | 一种环式结构型调节绕线装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1194825A (en) * | 1966-07-06 | 1970-06-10 | Marshall Richards Barcro Ltd | Improvements in and relating to Spooling of Filamentary Materials |
| US4124340A (en) * | 1977-01-25 | 1978-11-07 | Phillips Petroleum Company | Control of pipe tension between extruder die and take-up coiler |
| EP0049552A1 (de) * | 1980-10-08 | 1982-04-14 | Wavin B.V. | Vorrichtung zum Aufwickeln langgestreckten biegsamen Gutes, insbesondere Schläuche oder Kabel |
| GB2137239A (en) * | 1983-03-31 | 1984-10-03 | Morgan Construction Co | Coiling systems |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1328542A (en) * | 1971-04-19 | 1973-08-30 | British Insulated Callenders | Apparatus for winding electric cables and the like |
| AU495293B2 (en) * | 1974-08-27 | 1976-03-04 | Sumitomo Electric Industries, Ltd. | Automatic cable winding apparatus |
| JPS6011872Y2 (ja) * | 1978-08-30 | 1985-04-18 | タツタ電線株式会社 | 綾ねじ型トラバ−ス装置 |
| DE3308283A1 (de) * | 1983-03-09 | 1984-09-20 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Vorrichtung zum aufwickeln von kabeln oder biegsamen leitungen auf trommeln |
| SE8601484L (sv) | 1985-04-29 | 1986-10-30 | Skaltek Ab | Arm for upplindning av en kabel |
| DE3612743A1 (de) * | 1986-04-16 | 1987-10-22 | Prym Werke William | Verlegeeinrichtung fuer spulmaschinen |
| JP2621906B2 (ja) * | 1988-02-25 | 1997-06-18 | 宇部日東化成株式会社 | 線状物の整列巻取り装置 |
-
2013
- 2013-12-20 PT PT138290606T patent/PT2953876T/pt unknown
- 2013-12-20 ES ES13829060T patent/ES2851573T3/es active Active
- 2013-12-20 PL PL13829060T patent/PL2953876T3/pl unknown
- 2013-12-20 DK DK13829060.6T patent/DK2953876T3/da active
- 2013-12-20 HU HUE13829060A patent/HUE053166T2/hu unknown
- 2013-12-20 EP EP13829060.6A patent/EP2953876B1/de active Active
- 2013-12-20 WO PCT/EP2013/003930 patent/WO2014121812A2/de active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1194825A (en) * | 1966-07-06 | 1970-06-10 | Marshall Richards Barcro Ltd | Improvements in and relating to Spooling of Filamentary Materials |
| US4124340A (en) * | 1977-01-25 | 1978-11-07 | Phillips Petroleum Company | Control of pipe tension between extruder die and take-up coiler |
| EP0049552A1 (de) * | 1980-10-08 | 1982-04-14 | Wavin B.V. | Vorrichtung zum Aufwickeln langgestreckten biegsamen Gutes, insbesondere Schläuche oder Kabel |
| GB2137239A (en) * | 1983-03-31 | 1984-10-03 | Morgan Construction Co | Coiling systems |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2851573T3 (es) | 2021-09-07 |
| HUE053166T2 (hu) | 2021-06-28 |
| PT2953876T (pt) | 2021-02-03 |
| WO2014121812A3 (de) | 2014-10-23 |
| DK2953876T3 (da) | 2021-01-11 |
| EP2953876A2 (de) | 2015-12-16 |
| PL2953876T3 (pl) | 2021-06-14 |
| WO2014121812A2 (de) | 2014-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102013002020B4 (de) | Wickelungsvorrichtung und Wickelungsverfahren für ein strangförmiges Wickelgut | |
| EP2815857B1 (de) | Schere | |
| EP0912435B1 (de) | Verfahren und wickelmaschine zum kontinuierlichen aufwickeln einer materialbahn | |
| DE102013002017A1 (de) | Wickelungsvorrichtung und -verfahren für ein strangförmiges Wickelgut | |
| DE102013002023A1 (de) | Vorrichtung und Verfahren zum Wickeln eines strangförmigen Wickelguts | |
| DE102007053588A1 (de) | Abrollvorrichtung für Wickelrollen | |
| DE102014001414B4 (de) | Ablegekopf zum automatisierten Ablegen eines flächigen Materials, sowie Verwendung eines derartigen Ablegekopfes | |
| DE2917295A1 (de) | Wickelsystem fuer metallische straenge | |
| DE4128970A1 (de) | Abschervorrichtung | |
| EP0808788A1 (de) | Vorrichtung zum Aufwickeln einer Wirkwarenbahn | |
| DE102013002022A1 (de) | Vorrichtung zum Wickeln eines strangförmigen Wickelguts und Verfahren dazu | |
| DE102013002019A1 (de) | Wickelungsvorrichtung für ein strangförmiges Wickelgut und Verfahren dazu | |
| DE102014001134B4 (de) | Wickelungsvorrichtung für ein strangförmiges Wickelgut und Verfahren dazu | |
| DE102006012972B4 (de) | Vorrichtung zur Regelung des seitlichen Versatzes von Materialbahnen | |
| EP2953876B1 (de) | Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts | |
| DE19541095C2 (de) | Verfahren zur Förderung eines Bandes aus plastischem Material und Fördertisch zur kontinuierlichen Förderung von bandförmigem plastischem Material | |
| DE102006018642A1 (de) | Vorrichtung zum Erfassen von Parametern einer Kante eines Materialstückes und zum Regeln des Versatzes desselben | |
| EP3099613B1 (de) | Vorrichtung und verfahren zum wickeln eines strangförmigen wickelguts | |
| EP3099614B1 (de) | Verlegearm für eine vorrichtung zum wickeln eines strangförmigen wickelguts | |
| DE102014001135B3 (de) | Verlegearm für eine Vorrichtung zum Wickeln eines strangförmigen Wickelguts | |
| DE3308283A1 (de) | Vorrichtung zum aufwickeln von kabeln oder biegsamen leitungen auf trommeln | |
| DE102014001058B4 (de) | Vorrichtung und Verfahren zum Wickeln eines strangförmigen Wickelguts | |
| DE69721848T2 (de) | Aufwickler | |
| DE102012213966B4 (de) | Vorrichtung zum Ausrichten eines Rollentransportmittels im Transportweg einer an einem Rollenwechsler aufzuachsenden Materialrolle | |
| DE19944295A1 (de) | Aufrollvorrichtung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150731 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20171215 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200529 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1333265 Country of ref document: AT Kind code of ref document: T Effective date: 20201115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013015298 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20210108 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: TROESCH SCHEIDEGGER WERNER AG, CH |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Ref document number: 2953876 Country of ref document: PT Date of ref document: 20210203 Kind code of ref document: T Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: FGE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20201111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210311 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210211 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E053166 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013015298 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2851573 Country of ref document: ES Kind code of ref document: T3 Effective date: 20210907 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20210812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210311 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201111 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502013015298 Country of ref document: DE Representative=s name: SKM-IP SCHMID KRAUSS KUTTENKEULER MALESCHA SCH, DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20230119 Year of fee payment: 10 Ref country code: CH Payment date: 20230103 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20221230 Year of fee payment: 10 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230527 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231220 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20231219 Year of fee payment: 11 Ref country code: PT Payment date: 20231214 Year of fee payment: 11 Ref country code: NO Payment date: 20231218 Year of fee payment: 11 Ref country code: NL Payment date: 20231219 Year of fee payment: 11 Ref country code: LU Payment date: 20231218 Year of fee payment: 11 Ref country code: IE Payment date: 20231218 Year of fee payment: 11 Ref country code: HU Payment date: 20231215 Year of fee payment: 11 Ref country code: FR Payment date: 20231220 Year of fee payment: 11 Ref country code: FI Payment date: 20231218 Year of fee payment: 11 Ref country code: DK Payment date: 20231219 Year of fee payment: 11 Ref country code: DE Payment date: 20231214 Year of fee payment: 11 Ref country code: CZ Payment date: 20231207 Year of fee payment: 11 Ref country code: AT Payment date: 20231214 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20231213 Year of fee payment: 11 Ref country code: BE Payment date: 20231218 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240118 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20240110 Year of fee payment: 11 |