EP2325392A2 - Verfahren zum Einbauen eines Belages, Einbaubohle und Strassenfertiger - Google Patents
Verfahren zum Einbauen eines Belages, Einbaubohle und Strassenfertiger Download PDFInfo
- Publication number
- EP2325392A2 EP2325392A2 EP10002895A EP10002895A EP2325392A2 EP 2325392 A2 EP2325392 A2 EP 2325392A2 EP 10002895 A EP10002895 A EP 10002895A EP 10002895 A EP10002895 A EP 10002895A EP 2325392 A2 EP2325392 A2 EP 2325392A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- screed
- eccentric shaft
- installation
- stroke
- eccentric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 26
- 238000009434 installation Methods 0.000 claims abstract description 121
- 238000007906 compression Methods 0.000 claims description 33
- 230000006835 compression Effects 0.000 claims description 32
- 230000007246 mechanism Effects 0.000 claims description 24
- 239000000463 material Substances 0.000 claims description 23
- 230000008859 change Effects 0.000 claims description 13
- 239000000758 substrate Substances 0.000 claims description 7
- 230000001419 dependent effect Effects 0.000 claims description 5
- 238000006073 displacement reaction Methods 0.000 claims description 4
- 230000008878 coupling Effects 0.000 claims description 2
- 238000010168 coupling process Methods 0.000 claims description 2
- 238000005859 coupling reaction Methods 0.000 claims description 2
- 125000004122 cyclic group Chemical group 0.000 claims 2
- 230000001364 causal effect Effects 0.000 claims 1
- 239000011248 coating agent Substances 0.000 abstract description 12
- 238000000576 coating method Methods 0.000 abstract description 12
- 238000005056 compaction Methods 0.000 description 9
- 230000006978 adaptation Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000007667 floating Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000002349 favourable effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 235000010678 Paulownia tomentosa Nutrition 0.000 description 2
- 240000002834 Paulownia tomentosa Species 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000004323 axial length Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000000275 quality assurance Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 210000004894 snout Anatomy 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/004—Devices for guiding or controlling the machines along a predetermined path
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/30—Tamping or vibrating apparatus other than rollers ; Devices for ramming individual paving elements
- E01C19/34—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight
- E01C19/40—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight adapted to impart a smooth finish to the paving, e.g. tamping or vibrating finishers
- E01C19/407—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight adapted to impart a smooth finish to the paving, e.g. tamping or vibrating finishers with elements or parts partly or fully immersed in or penetrating into the material to act thereon, e.g. immersed vibrators or vibrating parts, kneading tampers, spaders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/10—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of mechanical energy
- B06B1/16—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of mechanical energy operating with systems involving rotary unbalanced masses
- B06B1/161—Adjustable systems, i.e. where amplitude or direction of frequency of vibration can be varied
- B06B1/162—Making use of masses with adjustable amount of eccentricity
- B06B1/164—Making use of masses with adjustable amount of eccentricity the amount of eccentricity being automatically variable as a function of the running condition, e.g. speed, direction
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/002—Apparatus for preparing and placing the materials and for consolidating or finishing the paving
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/30—Tamping or vibrating apparatus other than rollers ; Devices for ramming individual paving elements
- E01C19/34—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/42—Machines for imparting a smooth finish to freshly-laid paving courses other than by rolling, tamping or vibrating
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/48—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ
- E01C19/4833—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ with tamping or vibrating means for consolidating or finishing, e.g. immersed vibrators, with or without non-vibratory or non-percussive pressing or smoothing means
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/48—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ
- E01C19/4833—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ with tamping or vibrating means for consolidating or finishing, e.g. immersed vibrators, with or without non-vibratory or non-percussive pressing or smoothing means
- E01C19/4853—Apparatus designed for railless operation, e.g. crawler-mounted, provided with portable trackway arrangements
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/06—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C2301/00—Machine characteristics, parts or accessories not otherwise provided for
- E01C2301/14—Extendable screeds
Definitions
- the invention relates to a method according to the preamble of patent claim 1, a screed according to the preamble of claim 9, and a road finisher according to the preamble of claim 24.
- the floating towed screed When installing a pavement made of bituminous or concrete material with a paver, the floating towed screed has to compact the paving as evenly as possible over the entire paving width and to create a closed, level structure.
- the compression unit for example a so-called tamper or a tamper and an unbalance vibrator, is intended to produce the highest possible constant and continuous over the lining thickness pre-compaction, so that different or varying coating thicknesses have no appreciable effect on the final compaction.
- the stroke and the frequency of the tampers influence the precompression and the floating behavior of the screed. The larger the stroke, the higher the pre-compression becomes and the deeper pre-compressed. The frequency can be individually adjusted infinitely.
- EP 0 493 664 A discloses the tamper frequency, for example, to adjust as a function of the installation speed. It is also expedient to adapt the tamper stroke of the lining thickness so that the screed incorporates the lowest possible positive angle. If the stroke is too large for the lining thickness, a negative angle of attack of the screed may result, which may lead to an open, cracked surface structure or uncontrollable leveling behavior of the screed, resulting in unevenness.
- the covering thickness is specified, for example, by adjusting the height of the traction points of the screed on the paver.
- the frequency and the installation speed must be adapted to each other. So far, the vote is individually chosen so that the screed incorporates the least possible positive angle.
- the installation speed determines the effect of the compacting unit on the surface.
- the installation speed should be selected so that the most constant possible material supply is ensured by the transport vehicles. Since the installation speed has a great influence on the precompression, it should be ensured that the screed incorporates a low positive angle of attack in order to ensure good planarity, ie the driven installation speed must allow good precompression.
- the stroke has been manually adjusted in several stages, whereby the installation operation has to be interrupted in each case is. However, each stroke is only a compromise because it fits only to a lining thickness. For example, a larger amount of built-in material is pre-compressed by the tamper bar due to an increase in stroke within the set lining thickness. To increase the pre-compression is also by increasing the frequency. In certain cases, the tamper may cooperate with an additional imbalance vibrator in the screed to achieve even greater pre-compaction and planarity.
- the stroke is set to this lining thickness. If the covering thickness is changed, the installation must be interrupted and the stroke adjusted to the new covering thickness. Since the lining thickness can vary even during installation due to external influences, the set stroke often does not match the lining thickness, whereby the precompression varies and the angle of attack of the screed may change, and as a result the flatness and surface quality of the lining suffer. The adjustment is time consuming and cumbersome since e.g. eight connecting rods may be provided in the base beam alone, and requires great care to uniformly pre-compact over the working width.
- the invention has for its object to provide a method of the type mentioned above and a screed and a paver that allow a consistently high quality of a built-in coating, such. the installation of a covering with uniform strength in the working direction and uniform compression both in and across the working direction.
- the stroke of the compression unit is automatically adjusted depending on at least one installation parameter such as at least the installation speed and / or covering thickness, the stroke and the respective installation parameters are in an optimal relationship to each other, resulting in not only a largely constant pre-compression regardless of variations of the installation parameters but an optimally small positive angle of attack of the screed is maintained, which ensures a closed and even surface of the lining and consistently high quality of the installed lining.
- the adjustments can be made conveniently on all connecting rods at the same time.
- the screed allows, preferably even during ongoing installation operable adjusting, to adjust the stroke of the compression unit so that the hub, for example, before or during changes in installation speed and / or the thickness of lining, as they occur during installation either due to external influences or to be made on purpose, in each case largely optimally fits the speed of installation and / or covering thickness, resulting in an optimal and constant pre-compression and high quality of the installed lining.
- the stroke can be adjusted during installation, which is advisable for all connecting rods, the stroke adjustment installation does not need to be interrupted, and the workload is relieved.
- the paver operator or an operator on the screed may alternatively make the adjustment as needed.
- the adjustment is particularly useful automatically depending on installation parameters such as the installation speed and / or covering thickness, so that the uniform high final quality of the coating is achieved without appreciable influence of the staff.
- the road paver equipped to carry out the method and with this screed makes it possible, thanks to the control system and generated by actuators actuators, to achieve a consistently high quality of a built-in covering, in an automatic sequence a uniform in installation direction lining thickness and both be regulated in the installation direction as well as transversely to uniform compression, without requiring an operator to solve complicated tasks or to select parameters.
- the manipulated variables which are at least implemented by actuators to create the stroke and / or the frequency of the tamper, are generated automatically and process-oriented depending on relevant process parameters or machine parameters or installation parameters.
- the compacting unit comprises at least one tamper with a plurality of connecting rods in each section of the screed, i. in the basic screed, in each extending screed, and possibly also in screed widening parts attached to the screed.
- the respective tamper can be combined with an unbalance vibrator, which acts on the screed plate of the screed with substantially vertically acting unbalance pulses.
- the vibration frequency can, for example, as known, be adjustable over a flow control valve in a certain range, and according to the method also be automatically mitver reinstate depending on the at least one installation parameters.
- the screed also has a high compression device (see the above-mentioned technical information "The right screed for each task", page 8), which operates with high-frequency hydraulic pressure pulses, the frequency and pressure are adjustable, can also be appropriate adjustment of the high compression device depending on made such installation parameters, so that, for example, with varying installation speed and / or extremely uneven lining thickness results in a consistently high final quality of the installed coating.
- the angle of attack is adjusted by means of the leveling cylinder on the paver, while the frequency of the tamper, if necessary, for example, is adjusted via the rotational speed of the rotary drive of the tamper.
- the method to record the setting angle of the screed and / or the density and / or the rigidity and / or the temperature of the paving material, preferably by means of at least one, as the adjustment parameter for the adjustment of at least the stroke of the tamper Sensors, and, preferably, compared with a target specification, before the adjustment of at least the stroke takes place.
- the angle of attack is e.g. an extremely meaningful indicator of optimal compaction, which depends significantly on the stroke of the tamper.
- the frequency of the compression unit is automatically, preferably, adjusted along a characteristic curve dependent on at least one installation parameter or in a characteristic field.
- the automatic frequency adjustment may also include an unbalance vibrator. This ensures that both the stroke and the frequency are in optimum proportion to the installation parameter.
- the frequency of the tamper is adjusted according to a characteristic curve or a characteristic field, for example in direct dependence on the respectively set stroke.
- the characteristic curve or characteristic map can also be based on a predetermined proportionality between the stroke and the frequency, wherein, preferably, this proportionality is selected depending on at least one installation parameter or a predetermined change of at least one installation parameter, such as the installation speed, the angle of attack of the screed , the density or temperature or rigidity of the paving material, and the like.
- the compacting unit has a tamper with at least one connecting rod, an eccentric bushing and a driven eccentric shaft to substantially vertical working strokes tamper
- the eccentric bushing and the eccentric rotated relative to each other and the resulting from the relative rotational position between the eccentric bushing and eccentric shaft stroke of the tamper bar along the characteristic or adjusted in the map.
- the characteristic curve or the characteristic field is determined in advance.
- the characteristic curve or the characteristic diagram can be selected such that the precompression in the lining remains at least substantially constant, independently of changes in the lining thickness and / or the installation speed.
- At least the stroke can be adjusted by a control system for which a certain degree of precompression is set and the control parameters such as at least the installation speed and / or the lining thickness are input or supplied.
- the machine operator or an operator on the screed need not worry about the adjustment during installation, although, in a simple process variant, the adjustment can be made individually by hand.
- the operator does not need to manipulate the compaction unit, but he sets the respective manipulated variable, e.g. for the stroke, convenient on the control system or in the control panel, which is then implemented by an actuator accordingly.
- the stroke of the tamper bar is adjusted hydraulically and / or electrically and / or mechanically by means of an adjusting mechanism arranged between the eccentric shaft and the eccentric bush, expediently either continuously or in predetermined, previously determined as optimal steps.
- a hydraulically and / or electrically and / or mechanically actuated adjusting mechanism is provided, which allows, if necessary, even during ongoing installation, the adjustment of the stroke at any time, without having to intervene manually.
- an operatively connected to the adjusting, automatic, preferably computerized, control system be provided in the installation parameters such as at least the installation speed and / or the lining thickness are entered or there are, and on the For example, a degree of compaction to be generated by the compacting unit is adjustable.
- the control system then automatically adapts the stroke to changes in at least one installation parameter that are apparent during ongoing installation.
- control system should have at least one of installation parameters dependent characteristic or a map for the automatic adjustment of the stroke or the stroke and the frequency of the working cycles of the compression unit.
- the adjusting mechanism is driven between a rotatably driven eccentric shaft in the screed and one on the eccentric shaft in a Tamperance with substantially vertical working cycles Connecting rod rotatable eccentric bushing provided.
- the stroke of the Tamperance is thus adjustable by a relative rotational adjustment between the eccentric bushing and the eccentric shaft.
- half the stroke of a power stroke results from the sum of the eccentricity of an eccentric portion of the eccentric shaft and a portion up to the maximum of the eccentricity of the eccentric bushing.
- the adjusting between a rotatably driven eccentric shaft bearing bracket and a pivotally connected to the tamper bar connecting rod, adjustable in the bearing lever is arranged (toggle principle), wherein the adjusting lever and a driven by the eccentric shaft push rod in a common Joint axis are coupled to the connecting rod, such that an adjustment of the adjusting lever in the bearing block changed over the push rod generated by the rotation of the eccentric shaft, effective stroke of the tamper bar.
- an axially adjustable driver which engages in a thread-like guide track of the eccentric shaft rotatable eccentric bushing.
- the eccentric bushing is rotated via the thread-like guide track and fixed again in a rotationally fixed manner in the respectively selected setting.
- an axially movable adjusting mechanism is rotatably disposed in the eccentric shaft, the cyclically one with the rotatably mounted eccentric bushing cooperating rotary indexer operated to rotate the eccentric bush in steps relative to the eccentric shaft, and rotatably coupled in the selected rotational position with the eccentric shaft.
- a clamping mechanism which couples the eccentric positively or frictionally or positively with the eccentric shaft and temporarily supported by a supported in the screed axial release mechanism in a release position, in which the coupling is canceled between the eccentric shaft and the eccentric bush and these two components are rotatable relative to each other or are automatically rotated.
- the eccentric bush displaceable transversely to the axis of the eccentric shaft
- at least one control shaft adjustable by means of at least one control rod axially displaceable in the eccentric shaft is adjustable with respect to the eccentric shaft
- the guide bush bearing an oblique guide Guidance surface provided.
- About the inclined guide surface of the guide stone is displaced transversely to the axis of the eccentric shaft to adjust the eccentric bush or to change their effective portion of the eccentricity.
- the eccentric bushing does not need to be eccentric here, but may be cylindrical.
- the inclined guide surface of the guide block expediently two diametrically opposite guide blocks, axially displaceable abuts an inclined ramp either in the eccentric bushing or on the control rod.
- the bearing block has a straight or arcuate guideway into which a pivot abutment of the adjusting lever engages, which is displaceable by means of the adjusting mechanism along the guideway and fixed in selected Einstellpositionen, wherein the Course of the guideway has at least approximately to the axis of the eccentric shaft.
- the adjustment of the swiveling abutment of the adjusting lever results in a change of the eccentric shaft tapped strokes of the tamper strip.
- the guideway prefferably be arranged with respect to the axis of the eccentric shaft and the articulation axis on the connecting rod such that a bottom dead center of the eccentric shaft-induced working stroke of the tamper strip connected to the connecting rod regardless of the setting position of the swivel abutment of the adjusting lever along the guideway remains stationary, preferably or for example stationary in relation to a mounted on a bearing block frame of the screed mounted screed.
- the paver and / or screed has an input and display section on the control system or a machine control associated with the control system for additional or alternative setting of quantities, values or parameters, at least for the lift and / or frequency, however also the angle of the screed, provided that can be used by the operator to enter additional information in the control system as needed.
- a paver 1 in Fig. 1 for installing a covering 6 of bituminous or concrete paving material 5 on a substrate 7 has a chassis material bunker 4 on a chassis 2 and a control panel P of a control, eg with a control system 25, in a driver's cab.
- the control system 25 could be arranged elsewhere in the paver 1 or in a towed by the paver screed 3, in functional association with the controller or the control panel P or arranged on the screed 3 outside control panel P '.
- the screed 3 is attached to Switzerlandholmen 8, which are connected on both sides to articulation points 9 of the paver 1.
- the articulation points 9 can be moved up and down via adjustment devices 10, such as leveling cylinders, for example to adjust the covering thickness S of the installed covering 6.
- the screed 3 comprises, for example, a base screed 11 and extending screeds 12, each with a at least one tamper 14 and a tamper strip comprehensive compression unit 13 and the paving material 5 acting screed plate 18, wherein, preferably, the screed 3 with a small positive angle ⁇ works floating against a parallel to the ground 7 level.
- the Tamperology 14 is cyclically in pre-compression in working cycles drivable and performs strokes H with a frequency F. With ongoing installation, the paver 1 moves at a speed of installation V on the ground. 7
- the screed 3 (in the base beam 11 and each Ausziehbohle 12) additionally contains at least one unbalance vibrator (not shown) for applying the Glättbleches 18 with vertical pulses, and, optionally in working direction behind at least one pressure bar of a high compression device (not shown).
- the unbalance vibrator and the high-compression device are optional options of a screed 3, while the tamper 14 may be part of the basic equipment.
- the installation speed V as well as the covering thickness S are installation parameters which may even change or be changed during installation.
- the tamper 14 has to produce a pre-compaction in the loose on the substrate 7 poured paving material 5, which should be kept independent of changing installation parameters at least largely constant. Further installation parameters which may be relevant for the precompression may be the type and consistency of the paving material 5, its temperature, the ambient conditions, the design of the paving screed 3, and the like.
- the pre-compression is kept substantially constant regardless of the installation parameters changing during installation by at least the stroke H of the working cycles of the tamper 14 in dependence on at least one installation parameter, possibly even automatically adjusted, expediently also the frequency F, namely via the control system 25, which receives or knows at least one installation parameter as a control variable, and on which, preferably, a desired degree of precompression is set as the desired value.
- the control system 25 can be operated with characteristic curves and / or a characteristic map. Each characteristic curve or the characteristic field is predetermined and stored.
- the control system 25 is automatic and computerized.
- Fig. 2 shows a diagram of the stroke H (or the frequency F) on the lining thickness S (or the installation speed V).
- the solid curve H illustrates how the stroke H with increasing lining thickness S (or increasing installation speed V) is continuously increased here.
- dashed lines the measure known from the prior art is indicated to change the stroke H in each case with interrupted installation operation, the obliquely hatched fields X and Y illustrate that the changed after the stair profile stroke H or the pre-compression over a considerable part of the changes in the lining thickness S or the installation speed V does not fit.
- the solid curve F illustrates the also possible change in the frequency with increasing lining thickness S or installation speed V.
- the curves H, F can be stored in a map that works the control system 25 during ongoing installation.
- the characteristic F, H or the map is predetermined so that in view of high and consistent final quality of the built-in coating 6 is always an optimal ratio between the lining thickness and / or the installation speed and at least the stroke H, expediently also the frequency F optimal is.
- the adjustment of the stroke H, and possibly also the frequency F is expediently either automatically and even during installation under tapping changes of at least one installation parameter such as the lining thickness S and / or the installation speed V, or operator-guided.
- Fig. 3 illustrates the interior of the screed 3 with the tamper 14.
- the tamper strip 14 is shielded at the front of the screed 3 by a cover 19 (retractable snout) and guided substantially vertically movable between the cover 19 and the front edge of the Glättbleches 18.
- a bearing block 16 is mounted, the relative altitude is adjustable for example by means of an adjusting screw 20, such that the tamper strip 14 assumes a certain relative position to the screed plate 18 at the bottom dead center of each work cycle.
- an eccentric shaft 15 rotatably mounted, each having an eccentric portion 22 with a certain eccentricity.
- the eccentric portion 22 is located in a connecting rod 21 which connects the eccentric shaft 15 with the tamper strip 14.
- an eccentric bushing 23 On the eccentric portion 22 of the eccentric shaft 15 is an eccentric bushing 23, for example, in the embodiment shown via an adjusting 24, which is supported on the frame 17, rotatably coupled to the eccentric portion 22 and rotatably mounted in the connecting rod 21.
- the eccentric bushing 23 can rotate relative to the eccentric portion 22 of the eccentric shaft 15 and rotatably coupled in the rotational position respectively set with the eccentric shaft 15.
- the relative rotation of the eccentric bushing 23 relative to the eccentric section 22 effects an adjustment of the stroke, which the connecting rod 21 transmits to the tamper strip 14.
- the adjustment of the stroke can, preferably, be made automatically via the control system 25, which is in operative connection with the adjusting gear 24, in response to changes in certain installation parameters.
- the adjusting mechanism 24 could be actuated or operated as required by the user.
- the representation of the adjusting gear 24 in Fig. 3 is schematically because the adjusting gear 24 of course due to the rotational movement of the eccentric shaft 15 indirectly as Hubverstell Rhein via the eccentric shaft 15 has an effect on the eccentric bushing 23. This will be explained in detail with reference to the further embodiment.
- adjusting the 24 eccentric sleeve 23 is rotatably mounted on the eccentric portion 22 of the eccentric shaft 15.
- This is hollow, for example, such that an internal control rod 27 leads to an outside of the eccentric shaft 15 adjustment 26.
- the control rod 27 is coupled to a in a groove 29 axially adjustable in the eccentric shaft 15, rotatably connected to this driver 28 which engages with an outwardly projecting from the groove 29 extension 30 in a thread-like guide rail 31 of the eccentric bushing 23.
- the eccentric portion 22 has the axis of rotation of the eccentric shaft 15 has a first eccentricity, but is cylindrical on the outer circumference.
- the cylindrical outer circumference of the eccentric bush 23 is eccentric with respect to the cylindrical inner circumference. Since the cylindrical outer periphery of the eccentric bush 23 is rotatable in the connecting rod 21, and the tamper bar 14 is movable in a fixed vertical plane, the extent of the resulting eccentricity of the first and second eccentricities depends on which relative rotational position between the eccentric bushing 23 and the eccentric portion 22nd is set.
- the effective amount of eccentricity determines half the stroke H of a power stroke.
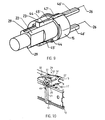
- the eccentric shaft 15 is, for example, on in Fig. 4 rotatably mounted left end in a bearing block, not shown here and is of in Fig. 4 Right end driven by a hydraulic motor, not shown.
- the adjusting drive 26 can therefore in front of the left-side end in Fig. 4 be arranged in the screed or on the frame 17.
- Fig. 5 differs mainly from Fig. 4 in that the adjusting mechanism 24 contains the driver 28, which is axially displaceable in the outwardly open groove 29 of the eccentric shaft 15, in such a way that the adjusting drive 26 engages via the control rod 27 from the outside of the eccentric shaft 15.
- the extension 30 of the driver 28 engages in the thread-like guide track 31 of the eccentric bushing 22, although relatively rotatable on the eccentric section 22 of the eccentric shaft 15 is seated, but via the driver 28, the groove 29 and the extension 30 in each axial position of the driver 28 rotatably coupled to the eccentric shaft 15 remains coupled.
- adjusting gear 24 has a rotary indexing mechanism, which is cyclically actuated by the example supported on the frame 17 of the screed adjusting 26 to rotate the eccentric bushing 23 relative to the eccentric portion 22 of the eccentric shaft 15.
- the eccentric bushing 23 is rotatably supported via at least one rolling bearing 32.
- an adjusting mechanism 30 is axially movable but rotatably coupled to the eccentric shaft 15 is arranged.
- a sawtooth toothing 34 (peripheral teeth) is provided, as well as a circumferentially offset sawtooth toothing 35 at the right end of the adjusting 33.
- the eccentric bushing 23 has at both ends corresponding sawtooth teeth 37 and 36.
- the axial length of the eccentric bushing 23 between their sawtooth teeth 36, 37 is slightly shorter than the clear width between the sawtooth teeth 35, 34.
- the adjusting mechanism 33 by means of, for example, an annular piston 41 of the adjusting 26 (hydraulically acted annular chamber 40) axially adjustable hydraulically.
- the left-side end of the adjusting mechanism 33 is supported on a spring 39 of a stop 38 on the eccentric shaft 15.
- Fig. 7 has the adjusting gear 24 as adjusting 26 to the annular piston 41.
- the adjustment drive 26 can be supported on the frame 17 of the screed.
- the annular piston 41 engages directly on an axial end of the eccentric bushing 23, of the 38 supported on the stop 38 on the eccentric shaft spring 39 via a stop ring 42 and a rolling bearing 43 axially on a conical portion 22 'of the eccentric portion 22 of the eccentric shaft 15th pressed and rotatably coupled to the eccentric shaft 15.
- the eccentric bush 23 can be against the force of the spring 39 through the annular piston 41 from the in Fig.
- the eccentric bushing 23 may e.g. with coaxial inner and outer cylindrical peripheries, i. circular cylindrical, formed and rotatably on two opposite guide blocks 44 may be arranged, which are in the outwardly open grooves of the perforated eccentric shaft 15 transversely to the axis of the eccentric shaft 15 slidably and rotatably with the eccentric shaft.
- Each guide block 44 has internally an inclined guide surface 45 which rests on an inclined guide ramp 47 of a control rod 46, which is axially displaceable in the eccentric shaft 15 by means of the adjustment 26 and in the selected setting position.
- the adjusting drive 26 may be formed hydraulically, electrically or mechanically.
- the eccentric bush 23 is cylindrical (manufacturing technology favorable), it acts eccentrically relative to the eccentric portion 22.
- Fig. 9 which is functionally the embodiment of Fig. 8
- the guide blocks 44 are axially displaceable and rotationally fixed to the eccentric shaft 15 coupled.
- a control rod 46 ' which is coupled to the adjusting drive 26 or coupled.
- the sloping guide surface 47 ' is externally formed on the guide block 44 and engages in an axial groove on the inner surface of the eccentric bushing 23 a.
- the oblique guide ramp 45 ' is shaped, so that by axial adjustment of the guide blocks 44, the eccentric bushing similar to in Fig. 8 is moved transversely to the axis of the eccentric shaft and remains rotationally fixed coupled to the eccentric shaft 15.
- the eccentric bushing 23 may be cylindrical.
- the adjusting gear 24 is incorporated into a toggle mechanism, via which the rotational movement of the eccentric shaft 15 is transmitted with its eccentric portion 22 via a rotatably mounted on the eccentric portion 22 thrust rod 48 and a hinge axis 49 on the connecting rod 21 to which the tamper strip 14 is attached.
- the connecting rod 21 preferably, on the same hinge axis 49, one end of an adjusting lever 50 is pivotally coupled, which is supported with a pivot abutment 51 (eg a pin) in a guide track 52 of the bearing block 16 'of the eccentric shaft 15.
- the bearing block 16 ' may be fixed on the frame 17 of the screed.
- the guideway 52 is for example a straight or arcuate slot-shaped slot in the bearing block 16 'and extends in a plane eccentric 15 transverse cutting.
- the adjusting drive 26 is effective between the bearing block 16 'and the pivot abutment 51 to adjust the pivot abutment 51 within the guide track 52.
- the guideway 52 with respect to the axis of the eccentric shaft 15 and the hinge axis 49 is formed and arranged such that regardless of the adjustment of the pivot abutment 51 in the guideway 52 of the bottom dead center of the strokes of the tamper strip 14 remains stationary in relation to the screed plate 18, ie, only the top dead center shifts during the stroke adjustment.
- the rotation of the eccentric shaft 15 moves via the eccentric portion 22, the push rod 48 substantially parallel to the top of the frame 17 back and forth.
- This oscillating movement causes via the common hinge axis 49 a pivoting movement of the adjusting lever 50 about the pivot abutment 51 following a circular arc section.
- the adjusting lever 50 derives therefrom a substantially vertical lifting component for the connecting rod 21. The extent of this lifting component is changed by adjusting the pivot abutment 51 in the guideway 52.
- the angle of attack ⁇ should be positive but with an optimal size, ie not too shallow and not too steep and is by the Control system 25 kept in optimal size.
- 2 lifting cylinders 28 are hinged to the chassis, which engage the Werholmen 8 and serve to position the screed 3 excavated, for example, for transport, or to perform a screed relief or optionally to increase the contact pressure of the screed 3.
- the tamper 14 of the compression unit 13 is (see Fig. 3 ) For example, by means of an eccentric drive with selectable stroke H and selectable frequency F operable.
- a speed selector 26 is provided for setting the installation speed V.
- the speed selector 26 can be adjusted by an actuator, not shown, if necessary, also from the control system 25 to change the installation speed V.
- the installation speed V is detected by a symbolically indicated sensor 31 and transmitted to the control system 25.
- the sensor 31 may be placed in the paver, for example, in the control panel P or in a traction drive or scan a reference on the substrate 7.
- an input section 27 may be provided for inputting parameters and / or displaying parameters.
- the lifting cylinders 28 is at least one actuator 28 ', for example, a solenoid-operated hydraulic valve assigned.
- At least one sensor 30 may be provided, which picks up the temperature, density or consistency of the paving material, for example, immediately before the screed 3 and optionally transmitted as information to the control system 25. This captured information could also be entered by an operator.
- at the screed 3 at least one sensor 29 is provided, which detects the angle of attack ⁇ of the screed relative to the substrate 7. This sensor 29 could tap the angle ⁇ also at the Switzerlandholmen 8. It can be provided over the mounting width several sensors 29.
- a sensor 37 can be provided for picking up the lining thickness S, which scans, for example, the substrate 7 or a reference, not shown, on the substrate 7.
- actuators for adjusting the Tamperhubes H and the tamper frequency F are provided and can be brought by means of the control system 25 generated control signals to implement control signals.
- FIG. 3 shows Fig. 3 the an actuator for the Tamperhub H forming gear 24 for rotating the eccentric bushing 23 relative to the eccentric 22.
- the tuned to the mounting parameters setting the Tamperhubes H automatically via the control system 25.
- the eccentric shaft 15 is rotationally driven for example by a hydraulic motor 32. Its speed determines the tamper frequency F.
- the actuator 33 for the hydraulic motor 32 may serve a solenoid-operated valve, such as a proportional flow control valve, which can be acted upon by the control system 25 with control signals.
- control system 25 by means of the control system 25 several different machine or construction site or installation material parameters are automatically controlled in dependence of each other, for example, to minimize error rates in the built-in coating 6 and to increase the quality of the built-in coating 6.
- the tamper 14 has to compact the loosely presented paving material 5 so strong that a sufficient for the screed 3 carrying capacity is created. Only then is it ensured that the screed 3 is dragged floating with its screed plate 18 with a favorable angle ⁇ .
- the tamper stroke H, the tamper frequency F, the installation speed V and the angle of attack ⁇ depend strongly on each other. If, for example, the installation speed V is reduced, this has an effect on the pre-compression of the paving material while the tamper frequency and leveling cylinder setting remain the same. It increases the carrying capacity of the paving material, so that the screed 3 continues to float and reduces the angle of attack ⁇ .
- At least manipulated variables for the compacting unit 13 or the tamper 14 are automatically controlled and regulated by the control system 25 as a function of the relevant processes or machine parameters. In particular, in this way takes place as a contribution to quality assurance a consistent and optimal compression of the paving material over the entire pave width of the screed.
- the angle of attack ⁇ is detected by means of the sensor 29 or a plurality of transversely distributed sensors 29 and transmitted to the control system 25, or there for specially responsible for these installation parameters controller to adjust the Tamperhub H at a change in the angle of attack ⁇ , so that the angle of attack ⁇ again is returned to an optimal value or can not change appreciably, so that the target lining thickness S is achieved with the same optimal pre-compression.
- the angle of attack ⁇ can vary over the installation width of the screed 3. Then the control system 25 can make the appropriate adjustment of Tamperhubes H for each tamper 14 individually, so that despite transverse to the installation direction varying covering thickness S, the compression over the pave width remains uniform.
- the tamper stroke H and the tamper frequency F can also be adjusted via the control system 25, and an adjustment of the leveling cylinders 10 may additionally be made as an alternative to an adaptation of the tamper frequency F.
- the adaptation of the tamper frequency F can be made particularly simple in that when changing the tamper stroke H, the tamper frequency F is automatically adjusted according to a characteristic or in a map that is or entered into the control system or there.
- An important installation parameter is, for example, also the density or consistency of the paving material 5. If the road paver 1 is equipped with a sensor 30, as mentioned, by means of which the density or consistency of the paving material can be detected, then the detected value is compared with a target specification, and in the case of a deviation from the target specification via the control system 25, an adaptation of, for example, the tamper stroke H and / or the tamper frequency F and / or the leveling cylinder adjustment is made such that the deviation angle of the detected density or consistency substantially maintains the angle of attack and the same Compression and flatness and thus quality of the coating 6 can be achieved.
- the installation speed V is also a significant installation parameter, since an adaptation requires the tamper stroke H and / or the tamper frequency F and / or the leveling cylinder adjustment, for example via the automatic control system 25.
- Another significant installation parameters are the rigidity of the paving material 5 and / or its temperature. These installation parameters can, for example, individually or combined by means of the sensor 30 or a stiffness and a temperature sensor is detected and sent to the control system 25, or input to a section 27 upon detection by an operator, whereupon the control system, if advised by the detected values, appropriately adjusts the tamper stroke H and / or tamper frequency F and / or leveling cylinder setting.
- an adjustment to the lifting cylinders 28 can be made, for example, to relieve the screed 3 during installation more or burden with emphasis in the direction of the ground 7, again in view, the angle of attack ⁇ as uniform as possible keep, and let the screed 3 work with even compaction of the coating 6.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Road Paving Machines (AREA)
Abstract
Description
- Die Erfindung betrifft ein Verfahren gemäß Oberbegriff des Patentanspruchs 1, eine Einbaubohle gemäß Oberbegriff des Patentanspruchs 9, sowie einen Straßenfertiger gemäß Oberbegriff des Patentanspruchs 24.
- Beim Einbauen eines Belages aus bituminösem oder Beton-Einbaugut mit einem Straßenfertiger hat die schwimmend geschleppte Einbaubohle das Einbaugut über die gesamte Einbaubreite möglichst gleichmäßig zu verdichten und eine geschlossene, ebene Struktur zu erzeugen. Das Verdichtungsaggregat, z.B. ein sogenannter Tamper oder ein Tamper und ein Unwucht-Vibrator, soll eine möglichst hohe, gleichbleibende und über die Belagstärke durchgehende Vorverdichtung erzeugen, damit unterschiedliche oder variierende Belagstärken keinen nennenswerten Einfluss auf die Endverdichtung haben. Der Hub und die Frequenz des Tampers beeinflussen hierbei die Vorverdichtung und das Schwimmverhalten der Einbaubohle. Je größer der Hub ist, desto höher wird die Vorverdichtung und desto tiefer wird vorverdichtet. Die Frequenz lässt sich individuell stufenlos verstellen.
EP 0 493 664 A offenbart z.B. die Tamperfrequenz beispielsweise in Abhängigkeit von der Einbaugeschwindigkeit zu verstellen. Es ist ferner zweckmäßig, den Tamperhub der Belagstärke so anzupassen, dass die Einbaubohle mit möglichst geringem positiven Anstellwinkel einbaut. Ist der Hub für die Belagstärke zu groß, kann ein negativer Anstellwinkel der Einbaubohle entstehen, wodurch es zu einer offenen, rissigen Oberflächenstruktur bzw. unkontrollierbarem Nivellierverhalten der Einbaubohle kommen kann, woraus Unebenheiten resultieren. Die Belagstärke wird z.B. durch die Einstellung der Höhenlage der Zugpunkte der Einbaubohle am Straßenfertiger vorgegeben. Auch die Frequenz und die Einbaugeschwindigkeit müssen aneinander angepasst werden. Bisher wird die Abstimmung individuell so gewählt, dass die Einbaubohle mit möglichst geringem positiven Anstellwinkel einbaut. Die Einbaugeschwindigkeit bestimmt andererseits die Wirkung des Verdichtungsaggregats auf die Oberfläche. Die Einbaugeschwindigkeit ist so zu wählen, dass eine möglichst konstante Materialversorgung durch die Transportfahrzeuge gewährleistet ist. Da die Einbaugeschwindigkeit einen großen Einfluss auf die Vorverdichtung hat, sollte sichergestellt sein, dass die Einbaubohle mit geringem positiven Anstellwinkel einbaut, um gute Ebenheit zu gewährleisten, d.h. die gefahrene Einbaugeschwindigkeit muss die gute Vorverdichtung ermöglichen. Der Hub wird bisher in mehreren Stufen manuell verstellt, wobei der Einbaubetrieb jeweils zu unterbrechen ist. Jede Hubstufe stellt jedoch nur einen Kompromiss dar, da sie nur zu einer Belagstärke passt. So wird beispielsweise durch eine Hubvergrößerung innerhalb der eingestellten Belagstärke eine größere Menge Einbaumaterial von der Tamperleiste vorverdichtet. Zu steigern ist die Vorverdichtung auch durch die Erhöhung der Frequenz. In bestimmten Fällen kann der Tamper mit einer zusätzlichen Unwucht-Vibrationseinrichtung in der Einbaubohle kooperieren, um eine noch höhere Vorverdichtung und Ebenheit zu erzielen. - Aus der Informationsschrift "Für jede Aufgabe die richtige Einbaubohle", der Firma Joseph Vögele AG, 68146 Mannheim/DE, Nr. 2400/10/2.1997, Seite 4, ist es bekannt, den Hub des einen Tamper aufweisenden Verdichtungsaggregats manuell dadurch zu verstellen, dass eine in einem die Stampferleiste antreibenden Pleuel drehbare Exzenterbuchse relativ zu einem Exzenterabschnitt der antreibenden Exzenterwelle verdreht wird. Die Exzenterbuchse ist auf den Exzenterabschnitt der Exzenterwelle gespannt und so mit dem Exzenterabschnitt drehfest gekoppelt, und lässt sich nach Lösen einer Spannschraube relativ zum Exzenterabschnitt verdrehen und wieder fixieren. Die Exzenterwelle wird von einem Hydromotor angetrieben, dessen Drehzahl z.B. stufenlos veränderbar ist. Wird vor dem Einbauen eine bestimmte Belagstärke festgelegt, dann wird der Hub auf diese Belagstärke eingestellt. Wird die Belagstärke verändert, müssen der Einbau unterbrochen und der Hub auf die neue Belagstärke eingestellt werden. Da die Belagstärke auch bei laufendem Einbau aufgrund äußerer Einflüsse variieren kann, passt der eingestellte Hub häufig nicht zur Belagstärke, wodurch die Vorverdichtung variiert und sich der Anstellwinkel der Einbaubohle verändern kann, und in der Folge die Ebenheit und Oberflächengüte des Belages leiden. Die Einstellung ist zeitaufwändig und mühsam, da z.B. allein in der Grundbohle acht Pleuel vorgesehen sein können, und erfordert hohe Sorgfalt, um über die Arbeitsbreite gleichförmig vorzuverdichten.
- Aus
DE 198 36 269 A ist ein Verfahren bekannt, die Frequenz des Tampers in Abhängigkeit vom Anstellwinkel der Einbaubohle zu variieren, wobei der Anstellwinkel der Einbaubohle über wenigstens einen Sensor laufend abgetastet wird. Die Verstellung der Frequenz erfolgt automatisch, während andere Maschinenparameter abhängig von den jeweiligen Einbauparametern von einem Bediener eingestellt werden. - Aus
DE 40 40 029 A ist ein Verfahren bekannt, bei dem während des Einbaus die Frequenz des Tampers abhängig von der Ist-Einbaugeschwindigkeit variiert wird. Andere Maschinenparameter werden flankierend vom Bediener eingestellt. So muss beispielsweise der Hub des Tampers vor dem Einbau oder während einer Einbauunterbrechung manuell eingestellt werden. Dies bedeutet eine erhebliche Belastung des Bedieners und hohe Sachkenntnis. - Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren der eingangs genannten Art sowie eine Einbaubohle und einen Straßenfertiger anzugeben, die eine gleichmäßig hohe Qualität eines eingebauten Belages ermöglichen, so z.B. den Einbau eines Belages mit in Arbeitsfahrtrichtung gleichmäßiger Stärke und sowohl in der als auch quer zur Arbeitsfahrtrichtung gleichförmiger Verdichtung.
- Die gestellte Aufgabe wird mit den Merkmalen des Patentanspruchs 1, den Merkmalen des Patentanspruchs 9 und den Merkmalen des Patentanspruchs 24 gelöst.
- Da zumindest der Hub des Verdichtungsaggregats abhängig von wenigstens einem Einbauparameter wie zumindest der Einbaugeschwindigkeit und/oder Belagstärke automatisch verstellt wird, stehen der Hub und der jeweilige Einbauparameter in einem optimalen Verhältnis zueinander, aus dem nicht nur eine weitgehend konstante Vorverdichtung unabhängig von Variationen der Einbauparameter resultiert, sondern ein optimal kleiner positiver Anstellwinkel der Einbaubohle gehalten wird, der eine geschlossene und ebene Oberfläche des Belages und gleichbleibend hohe Qualität des eingebauten Belages gewährleistet. Die Verstellungen können bequem an allen Pleueln gleichzeitig vorgenommen werden.
- In der Einbaubohle ermöglicht es das, vorzugsweise sogar bei laufendem Einbau betätigbare, Verstellgetriebe, den Hub des Verdichtungsaggregates so zu verstellen, dass der Hub beispielsweise vor oder bei Änderungen der Einbaugeschwindigkeit und/oder der Belagstärke, wie sie beim Einbauen entweder aufgrund äußerer Einflüsse auftreten oder mit Absicht vorgenommen werden, jeweils weitgehend optimal zur Einbaugeschwindigkeit und/oder Belagstärke passt, woraus eine optimale und konstante Vorverdichtung und hohe Qualität des eingebauten Belages resultieren. Wenn sich der Hub bei laufendem Einbau verstellen lässt, zweckmäßig bei allen Pleueln, braucht der Einbaubetrieb zur Hubverstellung nicht unterbrochen zu werden, und wird das Personal entlastet. Der Fertigerführer oder ein Bedienungsmann an der Einbaubohle kann die Verstellung alternativ nach Bedarf vornehmen. Besonders zweckmäßig erfolgt die Verstellung jedoch automatisch in Abhängigkeit von Einbauparametern wie der Einbaugeschwindigkeit und/oder Belagstärke, so dass die gleichmäßige hohe Endqualität des Belages ohne nennenswerte Einflussnahme des Personals erreicht wird.
- Der zum Durchführen des Verfahrens und mit dieser Einbaubohle ausgestattet Straßenfertiger ermöglicht es, dank des Regelsystems und von diesem generierter und von Stellgliedern umgesetzter Stellgrößen, eine gleichmäßig hohe Qualität eines eingebauten Belages zu erzielen, wobei in einem automatischen Ablauf eine in Einbaufahrtrichtung gleichmäßige Belagstärke und eine sowohl in Einbaufahrtrichtung als auch quer dazu gleichförmige Verdichtung geregelt werden, ohne dass dabei ein Bediener komplizierte Aufgaben zu lösen oder Parameter zu wählen braucht. Denn die Stellgrößen, die zumindest durch Stellglieder zur Erstellung des Hubs und/oder der Frequenz des Tampers umgesetzt werden, werden in Abhängigkeit von relevanten Prozessparametern oder Maschinenparametern bzw. Einbauparametern automatisch und prozessorientiert generiert.
- Hierbei umfasst das Verdichtungsaggregat zumindest einen Tamper mit jeweils mehreren Pleueln in jedem Abschnitt der Einbaubohle, d.h. in der Grundbohle, in jeder Ausziehbohle, und gegebenenfalls auch in an den Ausziehbohlen angebauten Bohlenverbreiterungsteilen. Um eine noch bessere Vorverdichtung zu erzielen, kann der jeweilige Tamper mit einem Unwucht-Vibrator kombiniert werden, der das Glättblech der Einbaubohle mit im Wesentlichen vertikal wirkenden Unwuchtimpulsen beaufschlagt. Die Vibrationsfrequenz kann, beispielsweise, wie bekannt, über ein Stromregelventil in einem bestimmten Bereich verstellbar sein, und verfahrensgemäß ebenfalls in Abhängigkeit von dem zumindest einen Einbauparameter automatisch mitverstellt werden. Sollte die Einbaubohle auch über eine Hochverdichtungseinrichtung verfügen (siehe die obenerwähnte technische Information "Für jede Aufgabe die richtige Einbaubohle", Seite 8), die mit hochfrequenten hydraulischen Druckimpulsen arbeitet, deren Frequenz und Pressdruck einstellbar sind, kann zweckmäßig auch die Verstellung der Hochverdichtungseinrichtung abhängig von solchen Einbauparametern vorgenommen, so dass beispielsweise bei variierender Einbaugeschwindigkeit und/oder extrem ungleichmäßiger Belagstärke dennoch eine konstant hohe Endqualität des eingebauten Belages resultiert.
- Speziell im Hinblick darauf, im eingebauten Belag keine spürbaren Änderungen der Belagstärke zu erzeugen bzw. die Oberfläche eben zu formen, ist es bei einer zweckmäßigen Verfahrensvariante günstig, flankierend zum Hub auch die Frequenz und/oder sogar den Anstellwinkel der Einbaubohle abhängig von wenigstens einem erfassten oder eingegebenen Einbauparameter automatisch zu verstellen. Der Anstellwinkel wird mittels der Nivellierzylinder am Fertiger verstellt, während die Frequenz des Tampers, falls erforderlich, beispielsweise über die Drehzahl des Drehantriebs des Tampers verstellt wird.
- Um einen Bediener weitgehend zu entlasten, wird zweckmäßig verfahrensgemäß als der für die Verstellung zumindest des Hubs des Tampers ursächliche Einbauparameter entweder der Anstellwinkel der Einbaubohle und/oder die Dichte und/oder die Steifigkeit und/oder die Temperatur des Einbaumaterials erfasst, vorzugsweise mittels wenigstens eines Sensors, und, vorzugsweise, mit einer Sollvorgabe verglichen, ehe die Verstellung zumindest des Hubs erfolgt. Der Anstellwinkel ist z.B. ein außerordentlich aussagefähiger Indikator für eine optimale Verdichtung, die wesentlich vom Hub des Tampers abhängt.
- Bei einer zweckmäßigen Verfahrensvariante wird flankierend neben dem Hub auch die Frequenz des Verdichtungsaggregates automatisch, vorzugsweise, entlang einer von wenigstens einem Einbauparameter abhängigen Kennlinie oder in einem Kennfeld verstellt. Die automatische Frequenzeinstellung kann auch einen Unwucht-Vibrator miteinschließen. Dadurch wird sichergestellt, dass sowohl der Hub als auch die Frequenz jeweils in einem optimalen Verhältnis zum Einbauparameter sind.
- Bei einer zweckmäßigen Verfahrensvariante wird die Frequenz des Tampers entsprechend einer Kennlinie oder eines Kennfeldes verstellt, beispielsweise in direkter Abhängigkeit von dem jeweils eingestellten Hub. Die Kennlinie oder das Kennfeld können jedoch auch auf einer vorbestimmten Proportionalität zwischen dem Hub und der Frequenz beruhen, wobei, vorzugsweise, diese Proportionalität abhängig von wenigstens einem Einbauparameter oder einer vorbestimmten Änderung wenigstens eines Einbauparameters gewählt wird, wie beispielsweise der Einbaugeschwindigkeit, des Anstellwinkels der Einbaubohle, der Dichte oder Temperatur oder Steifigkeit des Einbaumaterials, und dgl..
- Bei einer zweckmäßigen Verfahrensvariante, bei der das Verdichtungsaggregat einen Tamper mit einer über wenigstens ein Pleuel, eine Exzenterbuchse und eine angetriebene Exzenterwelle zu im Wesentlichen vertikalen Arbeitstakten antreibbaren Tamperleiste aufweist, werden, z.B. sogar bei laufendem Einbau, die Exzenterbuchse und die Exzenterwelle relativ zueinander verdreht und der aus der relativen Drehlage zwischen Exzenterbuchse und Exzenterwelle resultierende Hub der Tamperleiste entlang der Kennlinie oder im Kennfeld verstellt. Die Kennlinie bzw. das Kennfeld wird vorab festgelegt. Die Kennlinie bzw. das Kennfeld kann so gewählt sein, dass die Vorverdichtung im Belag unabhängig von Änderungen der Belagstärke und/oder der Einbaugeschwindigkeit zumindest im Wesentlichen konstant bleibt.
- Verfahrensgemäß kann ferner zumindest der Hub durch ein Regelsystem verstellt werden, für das ein bestimmter Vorverdichtungsgrad eingestellt wird und dem als Regelführungsgrößen Einbauparameter wie zumindest die Einbaugeschwindigkeit und/oder die Belagstärke eingegeben bzw. zugeführt wird oder werden. Der Maschinenführer bzw. ein Bedienungsmann an der Einbaubohle brauchen sich bei laufendem Einbau nicht um die Verstellung zu kümmern, obwohl, bei einer einfachen Verfahrensvariante, die Verstellung individuell von Hand vorgenommen werden kann. Dazu braucht der Bediener nicht am Verdichtungsaggregat zu manipulieren, sondern stellt er die jeweilige Stellgröße, z.B. für den Hub, bequem am Regelsystem oder im Bedienpult ein, die dann von einem Stellglied entsprechend umgesetzt wird.
- Zweckmäßig wird dabei der Hub der Tamperleiste durch ein zwischen der Exzenterwelle und der Exzenterbuchse angeordnetes Verstellgetriebe hydraulisch und/oder elektrisch und/oder mechanisch verstellt, zweckmäßig entweder kontinuierlich oder in vorgegebenen, zuvor als optimal ermittelten Schritten.
- In der Einbaubohle ist zweckmäßig ein hydraulisch und/oder elektrisch und/oder mechanisch betätigbares Verstellgetriebe vorgesehen, das, gegebenenfalls selbst bei laufendem Einbau, die jederzeitige Verstellung des Hubes ermöglicht, ohne manuell eingreifen zu müssen.
- Hierfür kann, entweder an der Einbaubohle oder im Straßenfertiger, ein mit dem Verstellgetriebe operativ verbundenes, automatisches, vorzugsweise computerisiertes, Regelsystem vorgesehen sein, in das Einbauparameter wie zumindest die Einbaugeschwindigkeit und/oder die Belagstärke eingegeben werden oder die dort vorhanden sind, und an dem beispielsweise ein durch das Verdichtungsaggregat zu erzeugender Vorverdichtungsgrad einstellbar ist. Das Regelsystem passt dann bei laufendem Einbau den Hub automatisch an sich abzeichnende Änderungen zumindest eines Einbauparameters an.
- Hierfür sollte das Regelsystem wenigstens eine von Einbauparametern abhängige Kennlinie oder ein Kennfeld zur automatischen Verstellung des Hubes oder des Hubes und der Frequenz der Arbeitstakte des Verdichtungsaggregates aufweisen.
- Bei einer zweckmäßigen Ausführungsform der Einbaubohle ist das Verstellgetriebe zwischen einer drehantreibbaren Exzenterwelle in der Einbaubohle und einer auf der Exzenterwelle in einem die Tamperleiste mit im Wesentlichen vertikalen Arbeitstakten antreibenden Pleuel drehbaren Exzenterbuchse vorgesehen. Der Hub der Tamperleiste ist somit durch eine relative Drehverstellung zwischen der Exzenterbuchse und der Exzenterwelle verstellbar. Abhängig von der relativen Drehposition der Exzenterbuchse auf der Exzenterwelle resultiert der halbe Hub eines Arbeitstaktes aus der Summe der Exzentrizität eines Exzenterabschnittes der Exzenterwelle und einem Teilbereich bis zum Maximum der Exzentrizität der Exzenterbuchse.
- Bei einer anderen zweckmäßigen Ausführungsform der Einbaubohle ist das Verstellgetriebe zwischen einer drehantreibbaren Exzenterwelle in der Einbaubohle und einer drehfest auf der Exzenterwelle angeordneten, jedoch quer zur Achse der Exzenterwelle verschiebbaren, in einem die Tamperleiste antreibenden Pleuel drehbar gelagerten Exzenterbuchse derart angeordnet, dass der Hub durch eine Querverschiebung der Exzenterbuchse relativ zur Exzenterwelle verstellbar ist. Das dann wirksame Ausmaß der Exzentrizität der Exzenterbuchse richtet sich nach dem Ausmaß der Querverschiebung der Exzenterbuchse relativ zur Exzenterwelle. Die Exzenterbuchse wirkt exzentrisch, kann aber kreiszylindrisch ausgebildet sein.
- Bei einer weiteren zweckmäßigen Ausführungsform der Einbaubohle ist das Verstellgetriebe zwischen einem eine drehantreibbare Exzenterwelle stützenden Lagerbock und einem mit einem die Tamperleiste antreibenden Pleuel gelenkig verbundenen, im Lagerbock verstellbaren Verstellhebel angeordnet (Kniehebelprinzip), wobei der Verstellhebel und eine von der Exzenterwelle antreibbare Schubstange in einer gemeinsamen Gelenkachse mit dem Pleuel gekoppelt sind, derart, dass eine Verstellung des Verstellhebels im Lagerbock den über die Schubstange von der Rotation der Exzenterwelle erzeugten, wirksamen Hub der Tamperleiste verändert.
- Bei der Ausführungsform mit der relativ zur Exzenterwelle verdrehbaren Exzenterbuchse ist zweckmäßig in der Exzenterwelle ein axial verstellbarer Mitnehmer drehfest gelagert, der in eine gewindegangartige Führungsbahn der auf der Exzenterwelle verdrehbaren Exzenterbuchse eingreift. Bei einer Verstellung, vorzugsweise auf elektrischem und/oder hydraulischem und/oder mechanischem Weg, des Mitnehmers in Achsrichtung der Exzenterwelle wird über die gewindegangartige Führungsbahn die Exzenterbuchse verdreht und in der jeweils gewählten Einstellung wieder drehfest fixiert.
- Bei einer alternativen Ausführungsform ist in der Exzenterwelle drehfest ein axial beweglicher Verstellmechanismus angeordnet, der taktweise ein mit der drehbar gelagerten Exzenterbuchse zusammenwirkendes Dreh-Schrittschaltwerk betätigt, um die Exzenterbuchse in Schritten relativ zur Exzenterwelle zu verdrehen, und in der gewählten Drehposition drehfest mit der Exzenterwelle zu kuppeln.
- Bei einer weiteren alternativen Ausführungsform kann zwischen der Exzenterwelle und der Exzenterbuchse ein Spannmechanismus vorgesehen sein, der die Exzenterbuchse kraftschlüssig oder reibschlüssig oder formschlüssig mit der Exzenterwelle kuppelt und durch einen in der Einbaubohle abgestützten Axial-Lösemechanismus vorübergehend in eine Lösestellung bringbar ist, in der die Kopplung zwischen der Exzenterwelle und der Exzenterbuchse aufgehoben wird und diese beiden Komponenten relativ zueinander verdrehbar sind oder selbsttätig verdreht werden.
- Bei einer weiteren, zweckmäßigen Ausführungsform mit der quer zur Achse der Exzenterwelle verlagerbaren Exzenterbuchse ist zwischen der Exzenterwelle und der drehfest mit der Exzenterwelle gekuppelten Exzenterbuchse mindestens ein mittels wenigstens einer in der Exzenterwelle axial verlagerbare Steuerstange quer zur Exzenterwelle verstellbarer, die Exzenterbuchse tragender Führungsstein mit einer schrägen Führungsfläche vorgesehen. Über die schräge Führungsfläche wird der Führungsstein quer zur Achse der Exzenterwelle verlagert, um die Exzenterbuchse zu verstellen bzw. um deren wirksamen Anteil der Exzentrizität zu ändern. Die Exzenterbuchse braucht hier nicht exzentrisch ausgebildet zu sein, sondern kann zylindrisch sein.
- Hierbei ist es zweckmäßig, wenn die schräge Führungsfläche des Führungssteins, zweckmäßig zweier diametral gegenüberliegender Führungssteine, axial verschiebbar an einer schrägen Rampe entweder in der Exzenterbuchse oder an der Steuerstange anliegt.
- Bei einer zweckmäßige Ausführungsform, bei der die Tamperleiste über einen Kniehebelmechanismus angetrieben wird, weist der Lagerbock eine gerade oder bogenförmige Führungsbahn auf, in die ein Schwenkwiderlager des Verstellhebels eingreift, das mittels des Verstellgetriebes entlang der Führungsbahn verlagerbar und in gewählten Einstellpositionen fixiert ist, wobei die Verlaufsrichtung der Führungsbahn zumindest in etwa zur Achse der Exzenterwelle weist. Die Verstellung des Schwenkwiderlagers des Verstellhebels resultiert in einer Änderung von der Exzenterwelle abgegriffenen Hubs der Tamperleiste. In diesem Fall ist es zweckmäßig, wenn die Führungsbahn in Bezug auf die Achse der Exzenterwelle und die Gelenkachse am Pleuel derart angeordnet ist, dass ein unterer Totpunkt des von der Exzenterwelle induzierten Arbeitstaktes der mit dem Pleuel verbundenen Tamperleiste unabhängig von der Einstellposition des Schwenkwiderlagers des Verstellhebels entlang der Führungsbahn ortsfest bleibt, vorzugsweise oder beispielsweise ortsfest in Relation zu einem an einem den Lagerbock tragenden Rahmen der Einbaubohle montierten Glättblech. Dies bedeutet, dass nur der obere Totpunkt des Arbeitstaktes in Hochrichtung verstellt wird, und sich die Lage des unteren Totpunktes in Bezug auf das Glättblech beim Verstellen des Hubes nicht verändert.
- Um Einbauparameter oder Änderungen von Einbauparametern erfassen und dem Regelsystem übermitteln oder in dieses eingeben zu können, ist bei einer zweckmäßigen Ausführungsform des Straßenfertigers am Straßenfertiger selbst und/oder der Einbaubohle und/oder den Holmen wenigstens ein Sensor, vorzugsweise mehrere in der und quer zur Einbaufahrtrichtung verteilte Sensoren, zum Erfassen von Ist-Einbauparametern vorgesehen, wobei die Sensoren mit dem Regelsystem verknüpft sind oder verknüpfbar sind. Da zumindest relevante Einbauparameter, wie zumindest der Anstellwinkel der Einbaubohle, oder Änderungen davon über die Sensoren erfassbar und an das Regelsystem übermittelbar sind, ist der Bediener entlastet, und ergibt sich eine gleichbleibend hohe Qualität des eingebauten Belages.
- Bei einer weiteren zweckmäßigen Ausführungsform ist am Straßenfertiger und/oder der Einbaubohle eine Eingabe- und Anzeigesektion am Regelsystem oder einer mit dem Regelsystem verknüpften Maschinensteuerung zum zusätzlichen oder alternativen Einstellen von Größen, Werten oder Parametern, zumindest für den Hub und/oder die Frequenz, aber auch den Anstellwinkel der Einbaubohle, vorgesehen, die durch Bediener benutzbar ist, um in das Regelsystem bedarfsabhängig zusätzliche Informationen einzugeben.
- Anhand der Zeichnungen werden Ausführungsformen des Erfindungsgegenstandes erläutert. Es zeigen:
- Fig. 1
- eine schematische Seitenansicht eines mit einer Einbaubohle ausgestatteten Straßenfertigers beim Einbauen eines Belages,
- Fig. 2
- ein Diagramm zur Verdeutlichung zweier Kennlinien bzw. eines Kennfeldes,
- Fig. 3
- eine Perspektivansicht eines Teiles einer mit einem Verdichtungsaggregat ausgestatteten Einbaubohle,
- Fig. 4
- eine Perspektivschnittdarstellung einer Ausführungsform einer Hubverstellein- richtung,
- Fig. 5
- eine perspektivische Teilschnittansicht einer weiteren Ausführungsform einer Hubverstelleinrichtung,
- Fig. 6
- einen Längsschnitt einer weiteren Ausführungsform einer Hubverstelleinrich- tung,
- Fig. 7
- einen Längsschnitt einer weiteren Ausführungsform einer Hubverstelleinrich- tung,
- Fig. 8
- eine Perspektivschnittansicht einer weiteren Ausführungsform einer Hubver- stelleinrichtung,
- Fig. 9
- eine Perspektivschnittdarstellung einer weiteren Ausführungsform einer Hub- verstelleinrichtung, und
- Fig. 10.
- eine Perspektivansicht einer weiteren Ausführungsform einer Hubverstellein- richtung.
- Ein Straßenfertiger 1 in
Fig. 1 zum Einbauen eines Belages 6 aus bituminösem oder Beton-Einbaumaterial 5 auf einem Untergrund 7 weist an einem Chassis 2 einen Einbaumaterialbunker 4 und in einem Führerstand ein Bedienpult P einer Steuerung, z.B. mit einem Regelsystem 25, auf. Alternativ könnte das Regelsystem 25 auch an anderer Stelle im Straßenfertiger 1 oder in einer vom Straßenfertiger geschleppten Einbaubohle 3 angeordnet sein, und zwar in funktioneller Zuordnung zu der Steuerung bzw. dem Bedienpult P oder einem an der Einbaubohle 3 angeordneten Außen-Bedienpult P'. - Die Einbaubohle 3 ist an Zugholmen 8 befestigt, die beidseitig an Anlenkstellen 9 des Straßenfertigers 1 angeschlossen sind. Die Anlenkstellen 9 können über Verstelleinrichtungen 10, wie Nivellierzylinder, auf- und abverstellt werden, beispielsweise um die Belagstärke S des eingebauten Belages 6 einzustellen. Die Einbaubohle 3 umfasst beispielsweise eine Grundbohle 11 und daran verfahrbare Ausziehbohlen 12, jeweils mit einem zumindest einen Tamper 14 bzw. eine Tamperleiste umfassenden Verdichtungsaggregat 13 und einem das Einbaumaterial 5 beaufschlagenden Glättblech 18, wobei, vorzugsweise, die Einbaubohle 3 mit einem kleinen positiven Anstellwinkel α gegenüber einer zum Untergrund 7 parallelen Ebene schwimmend arbeitet. Die Tamperleiste 14 ist zur Vorverdichtung zyklisch in Arbeitstakten antreibbar und führt Hübe H mit einer Frequenz F aus. Bei laufendem Einbau fährt der Straßenfertiger 1 mit einer Einbaugeschwindigkeit V auf dem Untergrund 7.
- Gegebenenfalls enthält die Einbaubohle 3 (in der Grundbohle 11 und jeder Ausziehbohle 12) zusätzlich wenigstens einen Unwucht-Vibrator (nicht gezeigt) zum Beaufschlagen des Glättbleches 18 mit vertikalen Impulsen, und, gegebenenfalls in Arbeitsfahrtrichtung hinten zumindest eine Pressleiste einer Hochverdichtungseinrichtung (nicht gezeigt). Der Unwucht-Vibrator und die Hochverdichtungseinrichtung sind wahlweise Optionen einer Einbaubohle 3, während der Tamper 14 zur Grundausstattung gehören kann.
- Die Einbaugeschwindigkeit V wie auch die Belagstärke S sind Einbauparameter, die sich gegebenenfalls sogar bei laufendem Einbau ändern oder geändert werden können. Der Tamper 14 hat eine Vorverdichtung im locker auf den Untergrund 7 geschütteten Einbaumaterial 5 zu erzeugen, die unabhängig von sich ändernden Einbauparametern zumindest weitestgehend konstant gehalten werden soll. Weitere, für die Vorverdichtung gegebenenfalls relevante Einbauparameter können die Art und Konsistenz des Einbaumaterials 5, dessen Temperatur, die Umgebungsbedingungen, die Bauweise der Einbaubohle 3, und dgl. sein.
- Erfindungsgemäß wird die Vorverdichtung unabhängig von den sich bei laufendem Einbau ändernden Einbauparametern im Wesentlichen konstant gehalten, indem zumindest der Hub H der Arbeitstakte des Tampers 14 in Abhängigkeit von zumindest einem Einbauparameter, gegebenenfalls sogar automatisch, verstellt wird, zweckmäßig auch die Frequenz F, und zwar über das Regelsystem 25, das als Regelführungsgröße zumindest einen Einbauparameter erhält oder kennt und an dem, vorzugsweise, ein gewünschter Vorverdichtungsgrad als Sollwert eingestellt wird. Das Regelsystem 25 kann mit Kennlinien und/oder einem Kennfeld betrieben werden. Jede Kennlinie bzw. das Kennfeld ist vorbestimmt und abgespeichert. Zweckmäßig ist das Regelsystem 25 automatisch und computerisiert.
-
Fig. 2 zeigt ein Diagramm des Hubs H (oder der Frequenz F) über der Belagstärke S (bzw. der Einbaugeschwindigkeit V). Die durchgezogene Kennlinie H verdeutlicht, wie der Hub H mit zunehmender Belagstärke S (bzw. steigender Einbaugeschwindigkeit V) hier kontinuierlich vergrößert wird. In gestrichelten Linien ist die aus dem Stand der Technik bekannte Maßnahme angedeutet, den Hub H in mehreren Stufen jeweils bei unterbrochenem Einbaubetrieb zu verändern, wobei die schräg schraffierten Felder X und Y verdeutlichen, dass der nach dem Treppenprofil geänderte Hub H bzw. die Vorverdichtung über einen erheblichen Teil der Veränderungen der Belagstärke S bzw. der Einbaugeschwindigkeit V nicht passt. - Die durchgezogene Kennlinie F verdeutlicht die ebenfalls mögliche Änderung der Frequenz mit zunehmender Belagstärke S bzw. Einbaugeschwindigkeit V. Die Kennlinien H, F können in einem Kennfeld abgelegt sein, das das Regelsystem 25 bei laufendem Einbau abarbeitet. Die Kennlinie F, H bzw. das Kennfeld wird so vorbestimmt, dass im Hinblick auf hohe und gleichbleibende Endqualität des eingebauten Belages 6 stets ein optimales Verhältnis zwischen der Belagstärke und/oder der Einbaugeschwindigkeit und zumindest dem Hub H vorliegt, zweckmäßig auch die Frequenz F optimal ist. Die Verstellung des Hubes H, und gegebenenfalls auch der Frequenz F, erfolgt zweckmäßig entweder automatisch und sogar bei laufendem Einbau unter Abgreifen von Änderungen zumindest eines Einbauparameters wie der Belagstärke S und/oder der Einbaugeschwindigkeit V, oder bedienergeführt.
-
Fig. 3 verdeutlicht einen Innenbereich der Einbaubohle 3 mit dem Tamper 14. Die Tamperleiste 14 ist an der Vorderseite der Einbaubohle 3 durch eine Abdeckung 19 (Einzugsschnauze) abgeschirmt und zwischen der Abdeckung 19 und der vorderen Kante des Glättbleches 18 im Wesentlichen vertikal beweglich geführt. An einem unterseitig das Glättblech 18 tragenden Rahmen 17 der Einbaubohle 3 ist ein Lagerbock 16 montiert, dessen relative Höhenlage beispielsweise mittels einer Justierschraube 20 einstellbar ist, derart, dass die Tamperleiste 14 im unteren Totpunkt jedes Arbeitstaktes eine bestimmte Relativposition zum Glättblech 18 einnimmt. Im Lagerbock 16 (über die Länge des Rahmens 17 können mehrere Lagerböcke 16 montiert sein) ist eine Exzenterwelle 15 drehbar gelagert, die jeweils einen Exzenterabschnitt 22 mit einer bestimmten Exzentrizität aufweist. Der Exzenterabschnitt 22 befindet sich in einem Pleuel 21, das die Exzenterwelle 15 mit der Tamperleiste 14 verbindet. Auf dem Exzenterabschnitt 22 der Exzenterwelle 15 ist eine Exzenterbuchse 23 beispielsweise in der gezeigten Ausführungsform über ein Verstellgetriebe 24, das sich am Rahmen 17 abstützt, drehfest mit dem Exzenterabschnitt 22 gekoppelt und im Pleuel 21 drehbar gelagert. Mittels des Verstellgetriebes 24 lässt sich die Exzenterbuchse 23 relativ zum Exzenterabschnitt 22 der Exzenterwelle 15 verdrehen und in der jeweils eingestellten Drehposition wieder drehfest mit der Exzenterwelle 15 kuppeln. Die relative Verdrehung der Exzenterbuchse 23 gegenüber dem Exzenterabschnitt 22 bewirkt eine Verstellung des Hubes, den das Pleuel 21 auf die Tamperleiste 14 überträgt. Die Verstellung des Hubes kann, vorzugsweise, automatisch über das Regelsystem 25 vorgenommen werden, das in operativer Verbindung mit dem Verstellgetriebe 24 ist, und zwar in Abhängigkeit von Änderungen bestimmter Einbauparameter. Alternativ könnte das Verstellgetriebe 24 nach Bedarf bedienergeführt angesteuert oder betätigt werden. - Die Darstellung des Verstellgetriebes 24 in
Fig. 3 ist schematisch, weil das Verstellgetriebe 24 natürlich aufgrund der Drehbewegung der Exzenterwelle 15 indirekt als Hubverstelleinrichtung über die Exzenterwelle 15 auf die Exzenterbuchse 23 einzuwirken hat. Dies wird anhand der weiteren Ausführungsform im Detail erläutert. - Bei dem in
Fig. 4 gezeigten Verstellgetriebe 24 sitzt die Exzenterbuchse 23 drehbar auf dem Exzenterabschnitt 22 der Exzenterwelle 15. Diese ist beispielsweise hohl, derart, dass eine innenliegende Steuerstange 27 zu einem außerhalb der Exzenterwelle 15 liegenden Verstellantrieb 26 führt. Die Steuerstange 27 ist mit einem in einer Nut 29 axial in der Exzenterwelle 15 verstellbaren, mit dieser drehfest verbundenen Mitnehmer 28 gekoppelt, der mit einem aus der Nut 29 nach außen vortretenden Fortsatz 30 in eine gewindegangartige Führungsbahn 31 der Exzenterbuchse 23 eingreift. - Der Exzenterabschnitt 22 hat zur Drehachse der Exzenterwelle 15 eine erste Exzentrizität, ist jedoch am Außenumfang zylindrisch. Der zylindrische Außenumfang der Exzenterbuchse 23 ist gegenüber dem zylindrischen Innenumfang exzentrisch. Da der zylindrische Außenumfang der Exzenterbuchse 23 im Pleuel 21 drehbar ist, und die Tamperleiste 14 in einer festgelegten Vertikalebene bewegbar ist, hängt das Ausmaß der resultierenden Exzentrizität aus den ersten und zweiten Exzentrizitäten davon ab, welche relative Drehposition zwischen der Exzenterbuchse 23 und dem Exzenterabschnitt 22 eingestellt ist. Das wirksame Ausmaß der Exzentrizität bestimmt den halben Hub H eines Arbeitstaktes. Durch Verschieben des Mitnehmers 28 in Richtung der Achse der Exzenterwelle 15 lässt sich somit der Hub H stufenlos zwischen einem Minimum und einem Maximum verstellen. Dabei bleibt die Exzenterbuchse 23 stets drehfest mit der Exzenterwelle 15 gekuppelt. Die eingestellte Axialposition des Mitnehmers 28 wird z.B. vom Verstellantrieb 26 gehalten.
- Die Exzenterwelle 15 ist beispielsweise am in
Fig. 4 linken Ende in einem hier nicht gezeigten Lagerbock drehbar gelagert und wird vom inFig. 4 rechtsseitigen Ende über einen nicht gezeigten Hydromotor angetrieben. Der Verstellantrieb 26 kann demzufolge vor dem linksseitigen Ende inFig. 4 in der Einbaubohle oder am Rahmen 17 angeordnet sein. -
Fig. 5 unterscheidet sich hauptsächlich vonFig. 4 , dass das Verstellgetriebe 24 den in der nach außen offenen Nut 29 der Exzenterwelle 15 axial verschiebbaren Mitnehmer 28 so enthält, dass der Verstellantrieb 26 über die Steuerstange 27 von der Außenseite der Exzenterwelle 15 her angreift. Der Fortsatz 30 des Mitnehmers 28 greift in die gewindegangartige Führungsbahn 31 der Exzenterbuchse 22 ein, die zwar relativ verdrehbar auf dem Exzenterabschnitt 22 der Exzenterwelle 15 sitzt, jedoch über den Mitnehmer 28, die Nut 29 und den Fortsatz 30 in jeder Axialposition des Mitnehmers 28 drehfest mit der Exzenterwelle 15 gekuppelt bleibt. - Das in
Fig. 6 gezeigte Verstellgetriebe 24 hat ein Dreh-Schrittschaltwerk, das durch den beispielsweise am Rahmen 17 der Einbaubohle abgestützten Verstellantrieb 26 taktweise betätigt wird, um die Exzenterbuchse 23 relativ zum Exzenterabschnitt 22 der Exzenterwelle 15 zu verdrehen. Im Pleuel 21 ist die Exzenterbuchse 23 über wenigstens ein Wälzlager 32 drehbar gelagert. Im Exzenterabschnitt 22 ist zumindest eine axiale Nut 29 vorgesehen, in der ein Verstellmechanismus 30 axial beweglich aber drehfest mit der Exzenterwelle 15 gekuppelt angeordnet ist. Am linksseitigen Ende des Verstellmechanismus 33 inFig. 6 ist eine Sägezahn-Verzahnung 34 (Umfangsverzahnung) vorgesehen, wie auch eine dazu in Umfangsrichtung versetzte Sägezahn-Verzahnung 35 am rechtsseitigen Ende des Verstellmechanismus 33. Die Exzenterbuchse 23 besitzt an beiden Enden entsprechende Sägezahn-Verzahnungen 37 bzw. 36. Die axiale Länge der Exzenterbuchse 23 zwischen ihren Sägezahn-Verzahnungen 36, 37 ist etwas kürzer als die lichte Weite zwischen den Sägezahn-Verzahnungen 35, 34. Über diese Weitendifferenz ist der Verstellmechanismus 33 mittels beispielsweise eines Ringkolbens 41 des Verstellantriebes 26 (hydraulisch beaufschlagbare Ringkammer 40) hydraulisch axial verstellbar. Das linksseitige Ende des Verstellmechanismus 33 stützt sich an einer Feder 39 eines Anschlages 38 auf der Exzenterwelle 15 ab. - Zum Verdrehen der Exzenterbuchse 23 auf dem Exzenterabschnitt 22 wird der Verstellmechanismus 33 aus der in
Fig. 6 gezeigten Position durch den Ringkolben 41 nach links verstellt, bis die Verzahnungen 34, 37 gelöst werden und die Verzahnungen 35, 36 ineinandergreifen. Durch eine Umfangsversetzung zwischen zumindest den Verzahnungen 34 und 35 wird die Exzenterbuchse 23 so um eine Zahnteilung verdreht. Danach wird der Druck in der Ringkammer 40 abgebaut, so dass die Feder 39 den Verstellmechanismus 33 wieder in die inFig. 6 gezeigte Position verschiebt, und, z.B. die Exzenterbuchse 23 um eine weitere Zahnteilung weiterdreht, die danach wieder drehfest mit dem Exzenterabschnitt 22 gekuppelt wird. - In
Fig. 7 weist das Verstellgetriebe 24 als Verstellantrieb 26 den Ringkolben 41 auf. Der Verstellantrieb 26 kann sich am Rahmen 17 der Einbaubohle abstützen. Der Ringkolben 41 greift direkt an einem Axialende der Exzenterbuchse 23 an, die von der am Anschlag 38 auf der Exzenterwelle 15 abgestützten Feder 39 über einen Anschlagring 42 und ein Wälzlager 43 axial auf einen konischen Abschnitt 22' des Exzenterabschnittes 22 der Exzenterwelle 15 gepresst und drehfest mit der Exzenterwelle 15 gekoppelt wird. Die Exzenterbuchse 23 lässt sich gegen die Kraft der Feder 39 durch den Ringkolben 41 aus der inFig. 7 gezeigten Position nach links verstellen, so dass der Reibschluss mit dem konischen Abschnitt 22' gelöst oder gelockert wird, und sich im Wälzlager 43 beispielsweise die Exzenterwelle 15 relativ zur Exzenterbuchse 23 verdrehen lässt, bis der Ringkolben 41 wieder zurückgezogen und die Exzenterbuchse 23 durch die Feder 39 in erneutem Reibschluss mit dem konischen Abschnitt 22' gebracht werden. Alternativ könnte, beispielsweise ähnlich wie inFig. 6 , die relative Verdrehbewegung auch an der Exzenterbuchse 23 vorgenommen werden. Das Pleuel 21 macht in der Ausführungsform inFig. 7 diese geringfügigen axialen Bewegungen der Exzenterbuchse 23 mit. Alternativ könnte das Wälzlager 32 im Pleuel 21 oder auf der Exzenterbuchse 23 ein Axialspiel haben. Bei einer nicht gezeigten Alternative könnte die Exzenterbuchse 23 sogar durch eine Verzahnung mit dem konischen Abschnitt 22' jeweils drehfest gekuppelt werden. - Bei der in
Fig. 8 gezeigten Ausführungsform der Hubverstelleinrichtung mit dem Verstellgetriebe 24 wird im Unterschied zu dem vorher beschriebenen Ausführungsformen derFig. 4 bis 7 nicht die Exzenterbuchse 23 relativ zum Exzenterabschnitt 22 der Exzenterwelle 15 verdreht, sondern quer zur Achse der Exzenterwelle 15 verschoben, um die gesamte wirksame Exzentrizität und damit den Hub zu verändern. - Die Exzenterbuchse 23 kann z.B. mit koaxialen inneren und äußeren zylindrischen Umfängen, d.h. kreiszylindrisch, ausgebildet und drehfest auf zwei gegenüberliegenden Führungssteinen 44 angeordnet sein, die in nach außen offenen Nuten der durchbohrten Exzenterwelle 15 quer zur Achse der Exzenterwelle 15 verschiebbar und mit der Exzenterwelle drehfest sind. Jeder Führungsstein 44 besitzt innenliegend eine schräge Führungsfläche 45, die auf einer schrägen Führungsrampe 47 einer Steuerstange 46 aufsteht, die in der Exzenterwelle 15 mittels des Verstellantriebes 26 axial verschiebbar und in der jeweiligen gewählten Einstellposition festsetzbar ist. Der Verstellantrieb 26 kann hydraulisch, elektrisch oder mechanisch ausgebildet sein. Obwohl die Exzenterbuchse 23 zylindrisch ist (herstellungstechnisch günstig), wirkt sie relativ zum Exzenterabschnitt 22 exzentrisch.
- In der Ausführungsform der
Fig. 9 , die funktionell der Ausführungsform vonFig. 8 ähnlich ist, sind im Exzenterabschnitt 22 der Exzenterwelle 15 zwei diametral gegenüberliegende axiale Nuten 29 eingeformt, in denen die Führungssteine 44 axial verschieblich und drehfest mit der Exzenterwelle 15 gekoppelt sind. An jedem Führungsstein 44 greift eine Steuerstange 46' an, die mit dem Verstellantrieb 26 gekoppelt oder koppelbar ist. Die schräge Führungsfläche 47' ist außenseitig am Führungsstein 44 angeformt und greift in eine Axialnut an der Innenoberfläche der Exzenterbuchse 23 ein. In dieser Axialnut ist die schräge Führungsrampe 45' geformt, so dass durch axiale Verstellung der Führungssteine 44 die Exzenterbuchse ähnlich wie inFig. 8 quer zur Achse der Exzenterwelle verschoben wird und dabei drehfest mit der Exzenterwelle 15 gekoppelt bleibt. Auch hier kann die Exzenterbuchse 23 zylindrisch sein. - In
Fig. 10 ist das Verstellgetriebe 24 in einen Kniehebelmechanismus eingegliedert, über den die Drehbewegung der Exzenterwelle 15 mit ihrem Exzenterabschnitt 22 über eine drehbar auf dem Exzenterabschnitt 22 gelagerte Schubstange 48 und eine Gelenkachse 49 auf das Pleuel 21 übertragen wird, an dem die Tamperleiste 14 befestigt ist. Mit dem Pleuel 21 ist, vorzugsweise, an derselben Gelenkachse 49, ein Ende eines Verstellhebels 50 gelenkig gekoppelt, der mit einem Schwenkwiderlager 51 (z.B. einem Zapfen) in einer Führungsbahn 52 des Lagerbocks 16' der Exzenterwelle 15 abgestützt ist. Der Lagerbock 16' kann auf dem Rahmen 17 der Einbaubohle festgelegt sein. Die Führungsbahn 52 ist beispielsweise ein gerader oder bogenförmiger, langlochförmiger Schlitz im Lagerbock 16' und erstreckt sich in einer die Exzenterwelle 15 querschneidenden Ebene. Der Verstellantrieb 26 ist zwischen dem Lagerbock 16' und dem Schwenkwiderlager 51 wirksam, um das Schwenkwiderlager 51 innerhalb der Führungsbahn 52 zu verstellen. Dadurch verändert sich die vom Exzenterabschnitt 22 abgegriffene und vom Verstellhebel 50 auf das Pleuel 21 übertragene Exzentrizität bzw. der Hub der Tamperleiste 14. - Zweckmäßig ist die Führungsbahn 52 in Bezug auf die Achse der Exzenterwelle 15 und die Gelenkachse 49 derart ausgebildet und angeordnet, dass unabhängig von der Verstellposition des Schwenkwiderlagers 51 in der Führungsbahn 52 der untere Totpunkt der Arbeitstakte der Tamperleiste 14 in Relation zum Glättblech 18 ortsfest bleibt, d.h., sich bei der Hubverstellung nur der obere Totpunkt verlagert.
- Die Rotation der Exzenterwelle 15 bewegt über den Exzenterabschnitt 22 die Schubstange 48 im Wesentlichen parallel zur Oberseite des Rahmens 17 hin und her. Diese Schwingbewegung bewirkt über die gemeinsame Gelenkachse 49 eine einem Kreisbogenabschnitt folgende Schwenkbewegung des Verstellhebels 50 um das Schwenkwiderlager 51. Der Verstellhebel 50 leitet daraus eine im Wesentlichen vertikale Hubkomponenten für das Pleuel 21 her. Das Ausmaß dieser Hubkomponente wird durch Verstellen des Schwenkwiderlagers 51 in der Führungsbahn 52 verändert.
- Die Anlenkpunkte 9 der Zugholme 8 des Straßenfertigers 1 von
Fig. 1 sind mit den Nivellierzylindern 10 beispielsweise über Stellglieder 10' (Hydraulikventile oder dgl.) höhenverstellbar und beeinflussen den Anstellwinkel α der Einbaubohle 3. Der Anstellwinkel α sollte positiv aber mit einer optimalen Größe, d.h. nicht zu flach und nicht zu steil sein und wird durch das Regelsystem 25 in optimaler Größe gehalten. Zusätzlich sind am Chassis 2 Hubzylinder 28 angelenkt, die an den Zugholmen 8 angreifen und dazu dienen, beispielsweise für Transportfahrt die Einbaubohle 3 ausgehoben zu positionieren, oder eine Bohlenentlastung vorzunehmen bzw. gegebenenfalls den Auflagedruck der Einbaubohle 3 zu verstärken. Der Tamper 14 des Verdichtungsaggregats 13 ist (sieheFig. 3 ) beispielsweise mittels eines Exzenterantriebes mit wählbarem Hub H und wählbarer Frequenz F betreibbar. - Im Bedienpult P oder Außensteuerpult P' ist ein Geschwindigkeitswähler 26 zum Einstellen der Einbaugeschwindigkeit V vorgesehen. Der Geschwindigkeitswähler 26 kann durch ein nicht gezeigtes Stellglied gegebenenfalls auch vom Regelsystem 25 verstellt werden, um die Einbaugeschwindigkeit V zu ändern. Die Einbaugeschwindigkeit V wird durch einen symbolisch angedeuteten Sensor 31 erfasst und an das Regelsystem 25 übermittelt. Der Sensor 31 kann im Straßenfertiger beispielsweise in dem Bedienpult P oder bei einem Fahrantrieb platziert sein oder eine Referenz auf dem Untergrund 7 abtasten. Im Bedienpult P oder bei dem Regelsystem 25 kann eine Eingabesektion 27 zum Eingeben von Parametern und/oder Anzeigen von Parametern vorgesehen sein. Den Hubzylindern 28 ist mindestens ein Stellglied 28', beispielsweise ein magnetbetätigtes Hydraulikventil, zugeordnet. Ferner kann als Ausstattung des Straßenfertigers 1 wenigstens ein Sensor 30 vorgesehen sein, der die Temperatur, Dichte oder Konsistenz des Einbaumaterials, beispielsweise unmittelbar vor der Einbaubohle 3 abgreift und gegebenenfalls als Information an das Regelsystem 25 übermittelt. Diese erfasste Information könnte auch von einem Bediener eingegeben werden. Beispielsweise an der Einbaubohle 3 ist zumindest ein Sensor 29 vorgesehen, der den Anstellwinkel α der Einbaubohle relativ zum Untergrund 7 erfasst. Dieser Sensor 29 könnte den Anstellwinkel α auch an den Zugholmen 8 abgreifen. Es können über die Einbaubreite mehrere Sensoren 29 vorgesehen sein. Weiterhin kann ein Sensor 37 zum Abgreifen der Belagstärke S vorgesehen sein, der beispielsweise den Untergrund 7 oder eine nicht gezeigte Referenz auf dem Untergrund 7 abtastet.
- Im Straßenfertiger 1 oder der Einbaubohle 3 sind Stellglieder zum Einstellen des Tamperhubes H bzw. der Tamperfrequenz F vorgesehen und mittels vom Regelsystem 25 generierter Stellsignale dazu bringbar, Stellsignale umzusetzen. Beispielsweise zeigt
Fig. 3 das ein Stellglied für den Tamperhub H bildende Getriebe 24 zum Verdrehen der Exzenterbuchse 23 relativ zum Exzenterabschnitt 22. Die jeweils auf die Einbauparameter abgestimmte Einstellung des Tamperhubes H erfolgt automatisch über das Regelsystem 25. Die Exzenterwelle 15 wird beispielsweise von einem Hydromotor 32 drehangetrieben. Dessen Drehzahl bestimmt die Tamperfrequenz F. Als Stellglied 33 für den Hydromotor 32 kann ein magnetbetätigtes Ventil dienen, z.B. ein Proportional-Stromregelventil, das von dem Regelsystem 25 mit Stellsignalen beaufschlagt werden kann. - Unter anderem mittels des Regelsystems 25 werden mehrere verschiedene Maschinen- bzw. Baustellen- bzw. Einbaumaterial-Parameter in Abhängigkeiten voneinander automatisch geregelt, um beispielsweise Fehlerquoten im eingebauten Belag 6 zu minimieren und die Qualität des eingebauten Belages 6 zu steigern.
- Der Tamper 14 hat das lose vorgelegte Einbaumaterial 5 so stark zu verdichten, dass eine für die Einbaubohle 3 ausreichende Tragfähigkeit geschaffen wird. Nur dann ist gewährleistet, dass die Einbaubohle 3 mit ihrem Glättblech 18 mit einem günstigen Anstellwinkel α schwimmend geschleppt wird. Der Tamperhub H, die Tamperfrequenz F, die Einbaugeschwindigkeit V und der Anstellwinkel α hängen stark voneinander ab. Wird beispielsweise die Einbaugeschwindigkeit V vermindert, wirkt sich dies bei gleichbleibender Tamperfrequenz und Nivellierzylindereinstellung auf die Vorverdichtung des Einbaumaterials aus. Es erhöht sich die Tragfähigkeit des Einbaumaterials, so dass die Einbaubohle 3 weiter aufschwimmt und sich der Anstellwinkel α vermindert. Wird die Einbaugeschwindigkeit hingegen erhöht, ohne die Tamperfrequenz zu erhöhen, verringert sich die Tragfähigkeit des Einbaumaterials und die Einbaubohle baut mit einem größeren Anstellwinkel α, jedoch mit geringerer Belagstärke S ein. Um solche Einflüsse auf die Endqualität des eingebauten Belages 6 zu minimieren oder zu vermeiden, werden erfindungsgemäß durch das Regelsystem 25 zumindest Stellgrößen für das Verdichtungsaggregat 13 bzw. den Tamper 14 in Abhängigkeit der relevanten Prozesse oder Maschinenparameter automatisch gesteuert und geregelt. Insbesondere erfolgt auf diese Weise als Beitrag zur Qualitätssicherung eine gleichbleibende und optimale Verdichtung des Einbaumaterials über die gesamte Einbaubreite der Einbaubohle.
- So wird beispielsweise der Anstellwinkel α mittels des Sensors 29 oder mehrerer in Querrichtung verteilter Sensoren 29 erfasst und an das Regelsystem 25, oder einen dort für speziell diesen Einbauparameter zuständigen Regler, übermittelt, um den Tamperhub H bei einer Änderung des Anstellwinkels α anzupassen, so dass der Anstellwinkel α wieder auf einen optimalen Wert zurückgeführt wird oder sich nicht nennenswert zu ändern vermag, so dass die Soll-Belagstärke S bei gleichbleibend optimaler Vorverdichtung erreicht wird.
- Als Nebenaspekt kann der Anstellwinkel α über die Einbaubreite der Einbaubohle 3 variieren. Dann kann das Regelsystem 25 die entsprechende Anpassung des Tamperhubes H für jeden Tamper 14 individuell vornehmen, so dass trotz quer zur Einbaufahrtrichtung variierender Belagstärke S die Verdichtung über die Einbaubreite gleichförmig bleibt.
- Unter Berücksichtigung des erfassten Anstellwinkels α oder dessen erfasster Änderungen kann ferner über das Regelsystem 25 der Tamperhub H und die Tamperfrequenz F angepasst werden, und gegebenenfalls zusätzlich eine Verstellung der Nivellierzylinder 10 zusätzlich oder als Alternative zu einer Anpassung der Tamperfrequenz F vorgenommen werden.
- Die Anpassung der Tamperfrequenz F kann besonders einfach dadurch vorgenommen werden, dass bei einer Änderung des Tamperhubes H die Tamperfrequenz F automatisch entsprechend einer Kennlinie oder in einem Kennfeld angepasst wird, die bzw. das in das Regelsystem eingegeben oder dort vorhanden ist.
- Ein maßgeblicher Einbauparameter ist beispielsweise auch die Dichte oder Konsistenz des Einbaumaterials 5. Falls der Straßenfertiger 1 mit einem Sensor 30, wie erwähnt, ausgestattet ist, mittels dessen die Dichte oder Konsistenz des Einbaumaterials erfassbar ist, dann wird der erfasste Wert mit einer Sollvorgabe verglichen, und wird bei einer Abweichung von der Sollvorgabe über das Regelsystem 25 eine Anpassung beispielsweise des Tamperhubes H und/oder der Tamperfrequenz F und/oder der Nivellierzylindereinstellung vorgenommen, derart, dass bei einer Abweichung der erfassten Dichte oder Konsistenz der Anstellwinkel im Wesentlichen beibehalten und die gleiche Verdichtung und Ebenheit und damit Qualität des Belages 6 erreicht werden.
- Auch die Einbaugeschwindigkeit V ist ein maßgeblicher Einbauparameter, da bei einer Änderung eine Anpassung des Tamperhubes H und/oder der Tamperfrequenz F und/oder der Nivellierzylindereinstellung, beispielsweise über das automatische Regelsystem 25 erfordert.
- Ein weiterer maßgeblicher Einbauparameter sind die Steifigkeit des Einbaumaterials 5 und/oder dessen Temperatur. Diese Einbauparameter können beispielsweise einzeln oder kombiniert mittels des Sensors 30 oder eines Steifigkeits- und eines Temperatursensors erfasst und an das Regelsystem 25 übermittelt, oder nach Erfassung von einem Bediener an der Sektion 27 eingegeben werden, worauf das Regelsystem, falls durch die erfassten Werte angeraten, den Tamperhub H und/oder die Tamperfrequenz F und/oder die Nivellierzylindereinstellung entsprechend anpasst. Als zusätzliche oder alternative Anpassung kann auch eine Verstellung an den Hubzylindern 28 vorgenommen werden, beispielsweise um die Einbaubohle 3 beim Einbau stärker zu entlasten oder mit Nachdruck in Richtung zum Untergrund 7 zu belasten, wiederum im Hinblick darauf, den Anstellwinkel α so gleichförmig wie möglich zu halten, und die Einbaubohle 3 mit gleichmäßiger Verdichtung des Belages 6 arbeiten zu lassen.
- Im Kern werden durch eine derartige Automatisierung Fehlerquoten und Kosten minimiert und die Qualität verbessert, wobei eine erhebliche Entlastung des oder der Bediener des Straßenfertigers eine automatische aber willkommene Konsequenz dieses Verfahrens ist.
Claims (26)
- Verfahren zum Einbauen eines Belages (6) aus Einbaumaterial (5) auf einem Untergrund (7) mit einer Einbaubohle (3) eines Straßenfertigers (1), bei dem ein Verdichtungsaggregat (13) der Einbaubohle (3), insbesondere ein Tamper (14), während des mit einer wählbaren Einbaugeschwindigkeit (V) laufenden Einbaus des eine wählbare Belagstärke (S) aufweisenden Belages (6) das Einbaugut (5) in zyklischen Arbeitstakten mit wählbarem Hub (H) und wählbarer Frequenz (F) vorverdichtet, dadurch gekennzeichnet, dass zumindest der Hub (H) des Verdichtungsaggregats (13) abhängig von wenigstens einem Einbauparamater wie zumindest der Einbaugeschwindigkeit (V) und/oder der Belagstärke (S) automatisch verstellt wird.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass flankierend zum Hub (H) auch die Frequenz (F) und/oder der Anstellwinkel (α) der Einbaubohle (3) abhängig von wenigstens einem Einbauparameter automatisch verstellt wird bzw. werden.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass als zumindest ein für die Verstellung zumindest des Hubs (H) ursächlicher Einbauparameter der Anstellwinkel der Einbaubohle (3) und/oder die Dichte und/oder die Steifigkeit und/oder die Temperatur des Einbaumaterials (5) beim Einbau erfasst, und, vorzugsweise, mit einer Sollvorgabe verglichen wird.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass flankierend zum Hub (H) auch die Frequenz (F) automatisch entlang einer und wenigstens einem Einbauparameter abhängenden Kennlinie oder in einem Kennfeld verstellt wird, vorzugsweise bei laufendem Einbau und so, dass die Vorverdichtung im Belag (6) unabhängig von Änderungen der Belagstärke (S) und/oder der Einbaugeschwindigkeit (V) zumindest im Wesentlichen konstant bleibt.
- Verfahren nach Anspruch 2, dadurch gekennzeichnet, dass die Frequenz (F) entsprechend einer Kennlinie oder eines Kennfeldes verstellt wird, die bzw. das auf einer vorbestimmten Proportionalität zwischen dem Hub (H) und der Frequenz (F) und/oder dem Anstellwinkel (α) beruht, wobei, vorzugsweise, diese Proportionalität abhängig von wenigstens einem Einbauparameter oder einer vorbestimmten Änderung wenigstens eines Einbauparameters gewählt wird.
- Verfahren nach wenigstens einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass zumindest der Hub (H) durch ein Regelsystem (25) verstellt wird, in das ein Soll-Vorverdichtungsgrad und als Regelführungsgrößen Einbauparameter wie zumindest die Einbaugeschwindigkeit (V) und/oder die Belagstärke (S) eingegeben werden.
- Verfahren nach wenigstens einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Hub (H) der Tamperleiste (14) durch ein zwischen der Exzenterwelle (15) und der Exzenterbuchse (23) angeordnetes Verstellgetriebe (24), vorzugsweise kontinuierlich oder in Schritten, und hydraulisch und/oder elektrisch und/oder mechanisch verstellt wird.
- Verfahren nach wenigstens einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass ein über die Einbaubreite der Einbaubohle (3) variierender Anstellwinkel (α) und/oder eine variierende Belagstärke (S) erfasst und zumindest der Hub (H) über die Einbaubreite an die Variation des Anstellwinkels (α) und/oder der Belagstärke (S) individuell angepasst wird.
- Einbaubohle (3) für Straßenfertiger (1), mit einem in zyklischen Arbeitstakten mit wählbarem Hub (H) und wählbarer Frequenz (F) antreibbaren Verdichtungsaggregat (13), insbesondere einem Tamper (14) mit einer Tamperleiste, zum Vorverdichten eines aus Einbaumaterial (5) eingebauten Belages (6), dadurch gekennzeichnet, dass das Verdichtungsaggregat (13) ein Verstellgetriebe (24) zum fernbetätigten Verstellen des Hubs (H) des Verdichtungsaggregats aufweist.
- Einbaubohle nach Anspruch 9, gekennzeichnet durch ein hydraulisch und/oder elektrisch und/oder mechanisch, vorzugsweise kontinuierlich oder in Schritten, vorzugsweise bei laufendem Einbau, betätigbares Verstellgetriebe (24).
- Einbaubohle nach Anspruch 9, dadurch gekennzeichnet, dass ein mit dem Verstellgetriebe (24) operativ verbundenes, automatisches, vorzugsweise computerisiertes, Regelsystem (25) vorgesehen ist, in das Einbauparameter wie zumindest die Einbaugeschwindigkeit (V) und/oder die Belagstärke (S) und ein durch das Verdichtungsaggregat erzeugbarer Soll-Vorverdichtungsgrad eingebbar oder vorhaltbar sind.
- Einbaubohle nach Anspruch 9, dadurch gekennzeichnet, dass das Regelsystem (25) wenigstens eine von Einbauparametern abhängige Kennlinie zur automatischen Verstellung des Hubes (H) in Abhängigkeit von den Einbauparametern aufweist.
- Einbaubohle nach Anspruch 11, dadurch gekennzeichnet, dass das Regelsystem (25) ein von Einbauparametern abhängiges Kennfeld zur automatischen Verstellung des Hubes (H) und der Frequenz (F) der Arbeitstakte des Verdichtungsaggregats in Abhängigkeit von Einbauparametern aufweist.
- Einbaubohle nach wenigstens einem der Ansprüche 9 bis 13, dadurch gekennzeichnet, dass das Verstellgetriebe (24) zwischen einer drehantreibbaren Exzenterwelle (15) in der Einbaubohle (3) und einer auf der Exzenterwelle (15) in einem die Tamperleiste (14) mit im Wesentlichen vertikalen Arbeitstakten antreibenden Pleuel (21) drehbaren Exzenterbuchse (23) angeordnet ist, derart, dass der Hub (H) der Tamperleiste (14) durch eine relative Drehverstellung zwischen der Exzenterbuchse (23) und der Exzenterwelle (15) verstellbar ist.
- Einbaubohle nach wenigstens einem der Ansprüche 9 bis 13, dadurch gekennzeichnet, dass das Verstellgetriebe (24) zwischen einer drehantreibbaren Exzenterwelle (15) in der Einbaubohle (3) und einer drehfest auf der Exzenterwelle (15) angeordneten, quer zur Achse der Exzenterwelle (15) verschiebbaren, in einem die Tamperleiste (14) antreibendem Pleuel (21) drehbaren Exzenterbuchse (23) angeordnet ist, derart, dass der Hub (H) durch eine Querverschiebung der Exzenterbuchse (23) relativ zur Exzenterwelle (15) verstellbar ist.
- Einbaubohle nach wenigstens einem der Ansprüche 9 bis 13, dadurch gekennzeichnet, dass das Verstellgetriebe (24) zwischen einem eine drehangetriebene Exzenterwelle (15) abstützenden Lagerbock (16') und einem mit einem die Tamperleiste (14) antreibenden Pleuel (21) gelenkig verbundenen, im Lagerbock (16') verstellbaren Verstellhebel (50) angeordnet ist, wobei der Verstellhebel (50) und die eine von der Exzenterwelle (15) antreibbare Schubstange (48) in einer, vorzugsweise gemeinsamen, Gelenkachse (49) mit dem Pleuel (21) gekoppelt sind.
- Einbaubohle nach Anspruch 14, dadurch gekennzeichnet, dass in der Exzenterwelle (15) ein axial verstellbarer, vorzugsweise elektrisch und/oder hydraulisch und/oder mechanisch verstellbarer, Mitnehmer (28) drehfest gelagert ist, der in eine gewindegangartige Führungsbahn (31) der verdrehbar auf der Exzenterwelle (15) gelagerten Exzenterbuchse (23) eingreift.
- Einbaubohle nach Anspruch 14, dadurch gekennzeichnet, dass in der Exzenterwelle (15) drehfest ein axial, vorzugsweise elektrisch und/oder hydraulisch und/oder mechanisch, beweglicher Verstellmechanismus (33) angeordnet ist, der ein mit der auf der Exzenterwelle (15) verdrehbar gelagerten Exzenterbuchse (23) zusammenwirkendes Dreh-Schrittschaltwerk (35, 36, 34, 37) aufweist.
- Einbaubohle nach Anspruch 14, dadurch gekennzeichnet, dass zwischen der Exzenterwelle (15) und der drehbar auf der Exzenterwelle (15) angeordneten Exzenterbuchse (23) ein Spannmechanismus (39, 42) vorgesehen ist, der die Exzenterbuchse (23) kraftschlüssig und/oder reibschlüssig und/oder formschlüssig drehfest mit der Exzenterwelle (15) koppelt, und dass der Spannmechanismus durch einen, vorzugsweise hydraulischen, in der Einbaubohle (3) abgestützten Axial-Lösemechanismus (41) vorübergehend in eine Lösestellung bringbar ist, in der die Kopplung zwischen der Exzenterwelle (15) und der Exzenterbuchse (23) aufgehoben und die Exzenterwelle (15) und die Exzenterbuchse (23) relativ zueinander verdrehbar sind.
- Einbaubohle nach Anspruch 13, dadurch gekennzeichnet, dass zwischen der Exzenterwelle (15) und der drehfest mit der Exzenterwelle (15) gekoppelten, querverstellbaren Exzenterbuchse (23) mittels wenigstens einer in der Exzenterwelle (15) axial verlagerbar geführten Steuerstange (46, 46') quer zur Exzenterwelle (15) verstellbare Führungssteine (44) mit jeweils einer schrägen Führungsfläche (45, 47') vorgesehen sind.
- Einbaubohle nach Anspruch 20, dadurch gekennzeichnet, dass die schräge Führungsfläche (45 bzw. 47') axial verschiebbar an einer schrägen Rampe (47, 47') entweder in der Exzenterbuchse (23) oder an der Steuerstange (46, 46') anliegt.
- Einbaubohle nach einem der Ansprüche 15, 20 oder 21, dadurch gekennzeichnet, dass die querverstellbare Exzenterbuchse (23) zylindrisch mit koaxialen Innen- und Außenumfängen ausgebildet ist und mit ihrem Außenumfang für das Pleuel exzentrisch wirkt.
- Einbaubohle nach Anspruch 16, dadurch gekennzeichnet, dass der Lagerbock (16') eine gerade oder bogenförmige Führungsbahn (52) aufweist, in die ein Verstellhebel-Schwenkwiderlager (51) eingreift, das mittels des Verstellgetriebes (24) entlang der Führungsbahn (52) verlagerbar ist, und dass die Verlaufsrichtung der quer zur Exzenterwelle (15) orientierten Führungsbahn zumindest in etwa zur Achse der Exzenterwelle (15) weist, und dass, vorzugsweise, die Führungsbahn (52) in Bezug auf die Achse der Exzenterwelle (15) und die Gelenkachse (49) am Pleuel (21) derart angeordnet ist, dass ein unterer Totpunkt des Arbeitstaktes der mit dem Pleuel (21) verbundenen Tamperleiste (14) unabhängig von der Einstellung des Schwenkwiderlagers (51) des Verstellhebels (50) entlang der Führungsbahn (52) in Relation zu einem an einem den Lagerbock (16') tragenden Rahmen (17) der Einbaubohle (3) montierten Glättblech (18) ortsfest bleibt.
- Straßenfertiger (1) mit wenigstens einer an Zugholmen (8) montierten Einbaubohle (3), wobei die Zugholme (8) am Straßenfertiger angelenkt und ihre Anlenkpunkte (9) mit Nivellierzylindern (10) höhenverstellbar sind und die Einbaubohle (3) ein Verdichtungsaggregat (13) mit wenigstens einem Tamper (14) aufweist, der mit wählbarem Hub (H) und wählbarer Frequenz (F) betreibbar ist, dadurch gekennzeichnet, dass ein computerisiertes Regelsystem (25) zum automatischen Verstellen zumindest des Hubs (H) des Tampers (14) abhängig von wenigstens einem Einbauparameter mittels von dem Regelsystem (25) generierter und von Stellgliedern umgesetzter Stellgrößen vorgesehen ist.
- Straßenfertiger nach Anspruch 24, dadurch gekennzeichnet, dass am Straßenfertiger (1) und/oder der Einbaubohle (3) und/oder den Holmen (8) Sensoren (29, 37, 30), vorzugsweise mehrere in der oder quer zur Einbaufahrtrichtung verteilte Sensoren, zum Erfassen von Ist-Einbauparametern wie dem Anstellwinkel (α) der Einbaubohle (3) vorgesehen und mit dem Regelsystem (25) verknüpft sind.
- Straßenfertiger nach Anspruch 24, dadurch gekennzeichnet, dass am Straßenfertiger (1) und/oder der Einbaubohle (3) eine Eingabe- und Anzeigesektion (27) am Regelsystem (25) oder einer mit dem Regelsystem (25) verknüpften Maschinensteuerung zum zusätzlichen oder alternativen Einstellen von Stellgrößen für zumindest den Hub (H) und/oder die Frequenz (F), vorzugsweise auch des Anstellwinkels (α), vorgesehen ist.
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18169491.0A EP3375936B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle für einen strassenfertiger |
| PL16189023T PL3138961T3 (pl) | 2009-11-20 | 2010-03-18 | Deska równająca |
| PL10002895T PL2325392T3 (pl) | 2009-11-20 | 2010-03-18 | Sposób wbudowywania nawierzchni, deska równająca i wykańczarka |
| PL18169491T PL3375936T3 (pl) | 2009-11-20 | 2010-03-18 | Belka równająca do układarki |
| EP16189023.1A EP3138961B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle |
| EP10002895.0A EP2325392B1 (de) | 2009-11-20 | 2010-03-18 | Verfahren zum einbauen eines belages, einbaubohle und strassenfertiger |
| JP2010254617A JP5785382B2 (ja) | 2009-11-20 | 2010-11-15 | 舗装を敷設する方法、スクリード、及び道路舗装車 |
| US12/949,889 US8998530B2 (en) | 2009-11-20 | 2010-11-19 | Method for laying down a pavement, a screed and a road paver |
| CN201010552930XA CN102071635B (zh) | 2009-11-20 | 2010-11-22 | 路面铺设方法、熨平板和铺路机 |
| US14/542,326 US9790648B2 (en) | 2009-11-20 | 2014-11-14 | Method for laying down a pavement, a screed and a road paver |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09014516 | 2009-11-20 | ||
| EP10002895.0A EP2325392B1 (de) | 2009-11-20 | 2010-03-18 | Verfahren zum einbauen eines belages, einbaubohle und strassenfertiger |
Related Child Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18169491.0A Division EP3375936B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle für einen strassenfertiger |
| EP18169491.0A Division-Into EP3375936B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle für einen strassenfertiger |
| EP16189023.1A Division EP3138961B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle |
| EP16189023.1A Division-Into EP3138961B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2325392A2 true EP2325392A2 (de) | 2011-05-25 |
| EP2325392A3 EP2325392A3 (de) | 2014-10-15 |
| EP2325392B1 EP2325392B1 (de) | 2020-09-30 |
Family
ID=42111282
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10002895.0A Active EP2325392B1 (de) | 2009-11-20 | 2010-03-18 | Verfahren zum einbauen eines belages, einbaubohle und strassenfertiger |
| EP18169491.0A Active EP3375936B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle für einen strassenfertiger |
| EP16189023.1A Active EP3138961B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18169491.0A Active EP3375936B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle für einen strassenfertiger |
| EP16189023.1A Active EP3138961B1 (de) | 2009-11-20 | 2010-03-18 | Einbaubohle |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8998530B2 (de) |
| EP (3) | EP2325392B1 (de) |
| JP (1) | JP5785382B2 (de) |
| CN (1) | CN102071635B (de) |
| PL (3) | PL3375936T3 (de) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2599919A1 (de) * | 2011-12-01 | 2013-06-05 | BOMAG GmbH | Vorrichtung zur Hubverstellung einer Stampfleiste eines Straßenfertigers |
| EP2599918A1 (de) | 2011-12-01 | 2013-06-05 | BOMAG GmbH | Verfahren und Vorrichtung zur Amplitudenverstellung einer Stampfleiste eines Straßenfertigers |
| CN104101434A (zh) * | 2013-04-12 | 2014-10-15 | 约瑟夫福格勒公司 | 通过路面整修机进行的底土温度测量 |
| EP2905378A1 (de) | 2014-02-07 | 2015-08-12 | Joseph Vögele AG | Tampervorrichtung |
| DE102015016777A1 (de) * | 2015-12-23 | 2017-06-29 | Bomag Gmbh | Stampferleistenvorrichtung einer Einbaubohle, Einbaubohle, Straßenfertiger sowie Verfahren zum Verändern des Hubs einer Stampferleistenvorrichtung |
| CN113136772A (zh) * | 2020-01-16 | 2021-07-20 | 约瑟夫福格勒公司 | 具有压实控制的道路摊铺机 |
| CN114250675A (zh) * | 2022-02-11 | 2022-03-29 | 湖南长株高速公路开发有限责任公司 | 高速公路互通匝道路基加宽填筑固化土施工方法 |
| CN114934425A (zh) * | 2022-05-25 | 2022-08-23 | 中国铁建股份有限公司 | 一种基于道面板的路面铺设方法 |
| CN115023520A (zh) * | 2020-01-27 | 2022-09-06 | 沃尔沃建筑设备公司 | 用于作业机械熨平板的夯实装置和用于作业机械熨平板的夯实装置的行程调节方法 |
| EP4368777A1 (de) * | 2022-11-08 | 2024-05-15 | Volvo Construction Equipment AB | Vibrationsantriebsstrang zur herstellung eines estrichkörpers einer estrichvorrichtung eines pflasterers, estrichkörper, estrichvorrichtung und pflasterer |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| PL2366831T3 (pl) * | 2010-03-18 | 2015-07-31 | Voegele Ag J | Sposób sterowania procesem przy wbudowywaniu nawierzchni i wykańczarka |
| EP2366832B1 (de) * | 2010-03-18 | 2015-09-23 | Joseph Vögele AG | Verfahren und Strassenfertiger zum Einbauen einer verdichteten Deckenschicht |
| EP2535456B1 (de) * | 2011-06-15 | 2013-12-18 | Joseph Vögele AG | Straßenfertiger mit Schichtdickenmessvorrichtung |
| CN102330404B (zh) * | 2011-07-14 | 2013-04-17 | 中联重科股份有限公司 | 摊铺机以及控制摊铺机的方法、装置和系统 |
| PL2578748T3 (pl) * | 2011-10-04 | 2019-01-31 | Joseph Vögele AG | Zewnętrzne stanowisko sterowania dla maszyny budowlanej |
| PL2599920T3 (pl) * | 2011-12-01 | 2015-07-31 | Voegele Ag J | Wykańczarka |
| US8371770B1 (en) * | 2012-04-09 | 2013-02-12 | Caterpillar Inc. | Apparatus for tamping paving material |
| CN102808369B (zh) * | 2012-05-29 | 2015-07-08 | 三一重工股份有限公司 | 熨平板压实梁、熨平板和摊铺机 |
| US8979425B2 (en) | 2012-10-30 | 2015-03-17 | Caterpillar Paving Products Inc. | Screed extender speed control |
| US9200415B2 (en) * | 2013-11-19 | 2015-12-01 | Caterpillar Paving Products Inc. | Paving machine with automatically adjustable screed assembly |
| EP3075909B1 (de) * | 2015-03-30 | 2017-09-06 | Joseph Vögele AG | Strassenbaumaschine mit netzwerk zur datenübertragung und verwendung eines teils einer stromleitung |
| US9587361B2 (en) | 2015-04-08 | 2017-03-07 | Caterpillar Paving Products Inc. | Temperature dependent auto adaptive compaction |
| WO2017114546A1 (en) * | 2015-12-28 | 2017-07-06 | Volvo Construction Equipment Ab | Eccentric assembly for a vibration compacting machine |
| US10316476B2 (en) | 2016-04-11 | 2019-06-11 | Caterpillar Paving Products Inc. | Screed assembly for a paving machine |
| US9995008B2 (en) | 2016-09-15 | 2018-06-12 | Caterpillar Paving Products Inc. | System and method for controlling vibratory effort on asphalt mat |
| CN106835903B (zh) * | 2017-01-16 | 2023-01-20 | 特路(北京)科技有限公司 | 摊铺机及铺路系统 |
| CN107217574A (zh) * | 2017-06-27 | 2017-09-29 | 徐州迈斯特机械科技有限公司 | 一种沥青摊铺机 |
| US10280572B1 (en) | 2017-11-07 | 2019-05-07 | Caterpillar Paving Products Inc. | System for heating a paving screed |
| US10422086B2 (en) * | 2017-11-13 | 2019-09-24 | Caterpillar Paving Products Inc. | Screed control system |
| US10669678B2 (en) * | 2017-12-14 | 2020-06-02 | Caterpillar Paving Products Inc. | System and method for generating a paving material map |
| EP3564440B1 (de) * | 2018-05-04 | 2022-03-23 | Joseph Vögele AG | Einbauzug |
| US10480132B1 (en) * | 2018-08-01 | 2019-11-19 | Caterpillar Paving Products Inc. | Fixed screed power take-off for improved performance |
| US10889944B2 (en) * | 2018-08-28 | 2021-01-12 | Caterpillar Paving Products Inc. | Control system for controlling operation of compaction systems of a paving machine |
| CN109610278B (zh) * | 2019-01-29 | 2021-01-26 | 长安大学 | 一种沥青混合料高密实摊铺成型方法 |
| CN109958037A (zh) * | 2019-04-03 | 2019-07-02 | 任新庄 | 一种易于调节的道路沥青铺设装置 |
| US11255057B2 (en) | 2020-03-07 | 2022-02-22 | Brian Gallagher | Screed assembly for road paving machines, and a method for repaving road surfaces |
| EP3960933A1 (de) * | 2020-08-27 | 2022-03-02 | Joseph Vögele AG | Verfahren zum einstellen einer temperatur eines glättblechs einer einbaubohle eines strassenfertigers |
| CN112626976A (zh) * | 2020-12-08 | 2021-04-09 | 广东龙越建筑工程有限公司 | 一种弧形路面刮平收光器 |
| EP4029992B1 (de) | 2021-01-14 | 2023-03-29 | Joseph Vögele AG | Strassenfertiger und verfahren zur tamperhubverstellung |
| PL4029991T3 (pl) * | 2021-01-14 | 2023-09-18 | Joseph Vögele AG | Regulacja skoku ubijaka |
| US11572662B2 (en) | 2021-04-01 | 2023-02-07 | Caterpillar Paving Products Inc. | Tow point index |
| CN113585005B (zh) * | 2021-08-13 | 2022-09-23 | 陈小雨 | 沥青路面铺设用引导装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4040029C1 (de) | 1990-12-14 | 1992-04-23 | Joseph Voegele Ag, 6800 Mannheim, De | |
| DE19836269C1 (de) | 1998-08-11 | 1999-08-26 | Abg Allg Baumaschinen Gmbh | Straßenfertiger |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE597036C (de) * | 1929-09-24 | 1934-05-16 | Kaspar Winkler | Strassenfertiger zur Herstellung von Betonstrassen |
| US3508475A (en) * | 1967-08-30 | 1970-04-28 | Barber Greene Co | Plate towed compactor |
| US3545349A (en) * | 1968-08-01 | 1970-12-08 | Hans Gert Otterman | Self-propelling paving machine |
| DK147663C (da) * | 1980-12-16 | 1985-05-28 | Phoenix Tagpag | Asfaltudlaegningsmaskine |
| CH655966A5 (de) * | 1981-04-07 | 1986-05-30 | Voegele Ag J | Fahrbarer fertiger. |
| DE3127377C2 (de) * | 1981-07-09 | 1985-05-02 | LIBA Lingener Baumaschinen Gesellschaft mbH & Co. KG, 4450 Lingen | Verdichtungsbohle für Straßenfertiger |
| DE3300092A1 (de) * | 1983-01-04 | 1984-07-12 | Abg-Werke Gmbh, 3250 Hameln | Einbaubohle fuer einen strassenfertiger |
| US4828428A (en) * | 1987-10-23 | 1989-05-09 | Pav-Saver Manufacturing Company | Double tamping bar vibratory screed |
| DE3933742A1 (de) * | 1988-12-19 | 1990-06-21 | Dynapac Gmbh | Verdichtungsbohle fuer einen strassenfertiger |
| JPH03150927A (ja) | 1989-11-07 | 1991-06-27 | Kokusai Electric Co Ltd | 音声通信装置 |
| JPH073042B2 (ja) * | 1990-11-08 | 1995-01-18 | 株式会社新潟鐵工所 | 敷均し機械におけるスクリードの初期設定方法 |
| US5356238A (en) * | 1993-03-10 | 1994-10-18 | Cedarapids, Inc. | Paver with material supply and mat grade and slope quality control apparatus and method |
| JP3150927B2 (ja) | 1997-08-22 | 2001-03-26 | 日本コンクリート工業株式会社 | 鉄筋コンクリート柱 |
| JP4176903B2 (ja) * | 1999-03-09 | 2008-11-05 | 東北リコー株式会社 | 排紙収納装置 |
| EP1185738A4 (de) * | 1999-05-19 | 2004-03-03 | Ingersoll Rand Co | Temperaturmessung für die kontrolle von pflaster- und verdichtungsarbeiten |
| JP3797652B2 (ja) * | 2000-07-03 | 2006-07-19 | 住友建機製造株式会社 | 舗装機械の締め固め制御装置 |
| DE10038943A1 (de) * | 2000-08-09 | 2002-02-21 | Voegele Ag J | Strassenfertiger und Einbauverfahren |
| US6551018B2 (en) * | 2001-03-29 | 2003-04-22 | Blaw-Knox Construction Equipment Corporation | Apparatus for tamping paving material |
| US20020168226A1 (en) * | 2001-05-14 | 2002-11-14 | Feucht Timothy A. | Automatic tamping mechanism control |
| JP3980322B2 (ja) * | 2001-10-25 | 2007-09-26 | 株式会社Nippoコーポレーション | 複数層同時舗装における敷均厚さ制御方法及びその装置 |
| DE10155507B4 (de) * | 2001-11-13 | 2005-10-06 | Abg Allgemeine Baumaschinen-Gesellschaft Mbh | Fertiger zum bodenseitigen Einbau von Schichten für Straßen od. dgl. |
| CA2515660A1 (en) * | 2004-08-11 | 2006-02-11 | Dirk Heims | Vibratory paving screed for a paver |
| DE102006046250A1 (de) * | 2006-09-28 | 2008-04-03 | Dynapac Gmbh | Einbaubohle für einen Straßenfertiger |
| JP2008106514A (ja) * | 2006-10-25 | 2008-05-08 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | 施工厚さ対応機能付道路舗装機械 |
| JP5008599B2 (ja) * | 2008-04-14 | 2012-08-22 | 株式会社Nippo | 舗装体端部締固め装置 |
| JP3150927U (ja) * | 2009-03-19 | 2009-06-04 | 木村 貢 | アスファルトフィニッシャーのタンパ装置 |
| EP2325391B1 (de) * | 2009-11-20 | 2013-03-20 | Joseph Vögele AG | Tamper mit wählbarem Hub |
| PL2905378T3 (pl) * | 2014-02-07 | 2017-05-31 | Joseph Vögele AG | Ubijakowe urządzenie belkowe |
-
2010
- 2010-03-18 PL PL18169491T patent/PL3375936T3/pl unknown
- 2010-03-18 PL PL10002895T patent/PL2325392T3/pl unknown
- 2010-03-18 EP EP10002895.0A patent/EP2325392B1/de active Active
- 2010-03-18 EP EP18169491.0A patent/EP3375936B1/de active Active
- 2010-03-18 EP EP16189023.1A patent/EP3138961B1/de active Active
- 2010-03-18 PL PL16189023T patent/PL3138961T3/pl unknown
- 2010-11-15 JP JP2010254617A patent/JP5785382B2/ja active Active
- 2010-11-19 US US12/949,889 patent/US8998530B2/en active Active
- 2010-11-22 CN CN201010552930XA patent/CN102071635B/zh active Active
-
2014
- 2014-11-14 US US14/542,326 patent/US9790648B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4040029C1 (de) | 1990-12-14 | 1992-04-23 | Joseph Voegele Ag, 6800 Mannheim, De | |
| EP0493664A1 (de) | 1990-12-14 | 1992-07-08 | Joseph Vögele AG | Verfahren zum Einbau von Schichten eines Strassenbaumaterials durch einen mit einem Verdichtungsaggregat versehenen Strassenfertiger |
| DE19836269C1 (de) | 1998-08-11 | 1999-08-26 | Abg Allg Baumaschinen Gmbh | Straßenfertiger |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2599919A1 (de) * | 2011-12-01 | 2013-06-05 | BOMAG GmbH | Vorrichtung zur Hubverstellung einer Stampfleiste eines Straßenfertigers |
| EP2599918A1 (de) | 2011-12-01 | 2013-06-05 | BOMAG GmbH | Verfahren und Vorrichtung zur Amplitudenverstellung einer Stampfleiste eines Straßenfertigers |
| DE102011119937A1 (de) * | 2011-12-01 | 2013-06-06 | Bomag Gmbh | Verfahren und Vorrichtung zur Amplitudenverstellung einer Stampfleiste eines Straßenfertigers |
| CN104101434A (zh) * | 2013-04-12 | 2014-10-15 | 约瑟夫福格勒公司 | 通过路面整修机进行的底土温度测量 |
| EP2905378A1 (de) | 2014-02-07 | 2015-08-12 | Joseph Vögele AG | Tampervorrichtung |
| US9487924B2 (en) | 2014-02-07 | 2016-11-08 | Joseph Voegele Ag | Tamper |
| DE102015016777A1 (de) * | 2015-12-23 | 2017-06-29 | Bomag Gmbh | Stampferleistenvorrichtung einer Einbaubohle, Einbaubohle, Straßenfertiger sowie Verfahren zum Verändern des Hubs einer Stampferleistenvorrichtung |
| US10060086B2 (en) | 2015-12-23 | 2018-08-28 | Bomag Gmbh | Tamping beam device of a paving screed, paving screed, road paver, and method for changing the stroke of a tamping beam device |
| CN113136772A (zh) * | 2020-01-16 | 2021-07-20 | 约瑟夫福格勒公司 | 具有压实控制的道路摊铺机 |
| EP3851584A1 (de) * | 2020-01-16 | 2021-07-21 | Joseph Vögele AG | Strassenfertiger mit verdichtungssteuerung |
| US11746479B2 (en) | 2020-01-16 | 2023-09-05 | Joseph Voegele Ag | Road paver with compaction control |
| CN115023520A (zh) * | 2020-01-27 | 2022-09-06 | 沃尔沃建筑设备公司 | 用于作业机械熨平板的夯实装置和用于作业机械熨平板的夯实装置的行程调节方法 |
| CN115023520B (zh) * | 2020-01-27 | 2024-04-19 | 沃尔沃建筑设备公司 | 用于作业机械熨平板的夯实装置和用于作业机械熨平板的夯实装置的行程调节方法 |
| CN114250675A (zh) * | 2022-02-11 | 2022-03-29 | 湖南长株高速公路开发有限责任公司 | 高速公路互通匝道路基加宽填筑固化土施工方法 |
| CN114934425A (zh) * | 2022-05-25 | 2022-08-23 | 中国铁建股份有限公司 | 一种基于道面板的路面铺设方法 |
| CN114934425B (zh) * | 2022-05-25 | 2024-04-19 | 中国铁建股份有限公司 | 一种基于道面板的路面铺设方法 |
| EP4368777A1 (de) * | 2022-11-08 | 2024-05-15 | Volvo Construction Equipment AB | Vibrationsantriebsstrang zur herstellung eines estrichkörpers einer estrichvorrichtung eines pflasterers, estrichkörper, estrichvorrichtung und pflasterer |
Also Published As
| Publication number | Publication date |
|---|---|
| PL3138961T3 (pl) | 2019-03-29 |
| US20150139730A1 (en) | 2015-05-21 |
| EP3138961A1 (de) | 2017-03-08 |
| US20110123267A1 (en) | 2011-05-26 |
| EP2325392A3 (de) | 2014-10-15 |
| EP3375936A1 (de) | 2018-09-19 |
| JP2011106261A (ja) | 2011-06-02 |
| PL2325392T3 (pl) | 2021-05-31 |
| EP2325392B1 (de) | 2020-09-30 |
| PL3375936T3 (pl) | 2022-01-10 |
| EP3138961B1 (de) | 2018-08-22 |
| US9790648B2 (en) | 2017-10-17 |
| JP5785382B2 (ja) | 2015-09-30 |
| CN102071635B (zh) | 2013-04-03 |
| EP3375936B1 (de) | 2021-08-11 |
| CN102071635A (zh) | 2011-05-25 |
| US8998530B2 (en) | 2015-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3138961B1 (de) | Einbaubohle | |
| EP2325391B1 (de) | Tamper mit wählbarem Hub | |
| EP2366832B1 (de) | Verfahren und Strassenfertiger zum Einbauen einer verdichteten Deckenschicht | |
| EP2366831B1 (de) | Verfahren zum Steuern des Prozesses beim Einbauen eines Belages und Strassenfertiger | |
| DE3239266C2 (de) | ||
| DE19836269C1 (de) | Straßenfertiger | |
| EP2599919B1 (de) | Vorrichtung zur Hubverstellung einer Stampfleiste eines Straßenfertigers | |
| DE69728549T2 (de) | Verfahren zum verdichten von asphalt und verdichtervorrichtung | |
| EP2199467B1 (de) | Einbaubohle und Verfahren zum Herstellen eines Fahrbahnbelages | |
| EP1905899B1 (de) | Einbaubohle für einen Strassenfertiger | |
| DE102011119937A1 (de) | Verfahren und Vorrichtung zur Amplitudenverstellung einer Stampfleiste eines Straßenfertigers | |
| DE112013001961T5 (de) | Vorrichtung zum Stampfen von Strassendeckenmaterial | |
| DE8136304U1 (de) | "maschine zum verlegen von asphalt" | |
| EP3498913B1 (de) | Strassenfertiger mit anhebbarem chassis | |
| EP2325393A1 (de) | Verfahren und Strassenfertiger zur Herstellung eines Strassenbelags | |
| EP0658653A1 (de) | Vibrationseinbaubohle für einen Strassenfertiger | |
| DE4040029C1 (de) | ||
| CH488863A (de) | Vorrichtung zur stufenlosen Verstellung der Arbeitsbreite von Strassenfertigern für den Bau von Schwarzdecken und Betonbelägen | |
| DE102005047096B3 (de) | Höhenverstellbares Seitenschild für Einbaubohle eines Straßenfertigers | |
| EP3498915B1 (de) | Strassenfertiger mit anhebbarem chassis | |
| DE102017202461A1 (de) | Stampfsysteme mit stufenlos einstellbarer amplitude und frequenz | |
| EP0374428A1 (de) | Verdichtungsbohle für einen Strassenfertiger | |
| EP0976871A1 (de) | Strassenwalze | |
| DE102020003682A1 (de) | Bodenverdichtungsvorrichtung zur verdichtung einer untergrundbelagsschicht, asphaltwalze und verfahren zum betrieb einer bodenverdichtungsvorrichtung | |
| WO2017001388A1 (de) | Einbaubohle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA ME RS |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: JOSEPH VOEGELE AG |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: ANGERMANN, NICOLE Inventor name: MUNZ, ROMAN, DIPL.-ING. Inventor name: PAWLIK, CHRISTIAN, DR.-ING. Inventor name: ZEGOWITZ, GUENTER Inventor name: EUL, ACHIM Inventor name: WEISER, RALF Inventor name: BERTZ, KLAUS Inventor name: BUSCHMANN, MARTIN, DIPL.-ING. |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA ME RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01C 19/40 20060101AFI20140909BHEP Ipc: E01C 19/48 20060101ALI20140909BHEP |
|
| 17P | Request for examination filed |
Effective date: 20141029 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: ANGERMANN, NICOLE Inventor name: BUSCHMANN, MARTIN, DIPL.-ING. Inventor name: WEISER, RALF Inventor name: MUNZ, ROMAN, DIPL.-ING. Inventor name: PAWLIK, CHRISTIAN, DR.-ING. Inventor name: EUL, ACHIM Inventor name: ZEGOWITZ, GUENTER Inventor name: BERTZ, KLAUS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180208 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200708 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: BERTZ, KLAUS Inventor name: WEISER, RALF Inventor name: MUNZ, ROMAN, DIPL.-ING. Inventor name: BUSCHMANN, MARTIN, DIPL.-ING. Inventor name: PAWLIK, CHRISTIAN, DR.-ING. Inventor name: EUL, ACHIM Inventor name: ZEGOWITZ, GUENTER Inventor name: ANGERMANN, NICOLE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1318913 Country of ref document: AT Kind code of ref document: T Effective date: 20201015 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502010016760 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201231 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201230 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201230 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200930 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210201 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502010016760 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| 26N | No opposition filed |
Effective date: 20210701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210318 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210318 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1318913 Country of ref document: AT Kind code of ref document: T Effective date: 20210318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210318 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230322 Year of fee payment: 14 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20100318 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20230223 Year of fee payment: 14 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230524 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230331 Year of fee payment: 14 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200930 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240327 Year of fee payment: 15 Ref country code: GB Payment date: 20240320 Year of fee payment: 15 |