EP2283979A2 - Handwerkzeug mit einem Oszillationsantrieb - Google Patents
Handwerkzeug mit einem Oszillationsantrieb Download PDFInfo
- Publication number
- EP2283979A2 EP2283979A2 EP10171089A EP10171089A EP2283979A2 EP 2283979 A2 EP2283979 A2 EP 2283979A2 EP 10171089 A EP10171089 A EP 10171089A EP 10171089 A EP10171089 A EP 10171089A EP 2283979 A2 EP2283979 A2 EP 2283979A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- hand tool
- driver
- guide surface
- work spindle
- coupled
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000010355 oscillation Effects 0.000 title description 18
- 230000005540 biological transmission Effects 0.000 claims abstract description 33
- 230000008878 coupling Effects 0.000 claims abstract description 18
- 238000010168 coupling process Methods 0.000 claims abstract description 18
- 238000005859 coupling reaction Methods 0.000 claims abstract description 18
- 230000002093 peripheral effect Effects 0.000 claims description 10
- 238000005096 rolling process Methods 0.000 claims description 9
- 230000033001 locomotion Effects 0.000 description 31
- 239000000463 material Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000003534 oscillatory effect Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 238000000576 coating method Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000002349 favourable effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 241000282472 Canis lupus familiaris Species 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000000418 atomic force spectrum Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003746 feather Anatomy 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B23/00—Portable grinding machines, e.g. hand-guided; Accessories therefor
- B24B23/02—Portable grinding machines, e.g. hand-guided; Accessories therefor with rotating grinding tools; Accessories therefor
- B24B23/028—Angle tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B23/00—Portable grinding machines, e.g. hand-guided; Accessories therefor
- B24B23/04—Portable grinding machines, e.g. hand-guided; Accessories therefor with oscillating grinding tools; Accessories therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B27—WORKING OR PRESERVING WOOD OR SIMILAR MATERIAL; NAILING OR STAPLING MACHINES IN GENERAL
- B27B—SAWS FOR WOOD OR SIMILAR MATERIAL; COMPONENTS OR ACCESSORIES THEREFOR
- B27B19/00—Other reciprocating saws with power drive; Fret-saws
- B27B19/006—Other reciprocating saws with power drive; Fret-saws with oscillating saw blades; Hand saws with oscillating saw blades
Definitions
- the invention relates to a hand tool with a housing, with a motor shaft coupled to a drive motor, with a work spindle which is rotationally oscillating about its longitudinal axis and with a rotatably driven by the motor shaft coupling member with a closed guide surface which rotates a guide axis, wherein the guide surface is coupled via transmission means with at least one driver to its drive.
- the rotation of a motor shaft generated by a motor is transmitted to a rocker arm by means of an eccentric portion of the motor shaft.
- the oscillating lever is non-rotatably connected to a tool spindle, so that a movement of the oscillating lever caused by the rotating eccentric portion leads to a rotational oscillation of the tool spindle.
- a transmission for generating a rotary oscillation can basically be realized.
- the transmission lever performs relative to the longitudinal axis in addition to the pivoting at the same frequency a pushing movement along the sliding joint.
- the swash bearing is axially displaceably held along a shaft profile of its drive shaft in order to assume a positively constrained axial position on the drive shaft in accordance with the rotational and pushing movement of the transmission lever through or about the longitudinal axis of the tool spindle.
- Such hand tools with an oscillating drive find a variety of uses, such as when grinding, sawing or even cutting workpieces.
- usual oscillation frequencies are approximately in the range of 5,000 to 25,000 oscillations per minute, with typical pivoting angles of the tool spindle being approximately between 0.5 degrees and 7 degrees.
- Hand tools designed in this way are highly flexible and suitable for many possible applications, areas of application and tools to be used. Their compact and lightweight design allows the user to adopt a wide variety of grip or working positions with respect to the hand tool or the workpiece. However, it has been found that the handling of such hand tools can be improved to ensure a pleasant work can. In particular, the weight of the hand tool as well as the vibrations acting on the operator are considered.
- the vibrations generated by the oscillation drive can be reduced, but thus increase the production cost and the weight of the power tool, also can increase their susceptibility to wear.
- the invention has for its object to provide an alternative, improved oscillatory drive, which is simple and reliable and can be produced with little effort. If possible, a reduction of vibrations should also be achievable.
- a suitable connection such as a joint or toothing
- the engagement of the driver in a peripheral region of the work spindle permits a component-sparing, wear-reducing introduction of force into the work spindle, since the moment to be transmitted by the work spindle can be generated by introducing a relatively small force in the peripheral region of the work spindle.
- the hand tool on two counter-driven driver.
- the arrangement of two counter-driven driver can be an effective measure to prevent vibration, with no separate Massenaus GmbH.
- the arrangement of two counter-driven driver can be an effective measure to prevent vibration, with no separate Massenaus GmbH.
- the arrangement of two counter-driven driver can be an effective measure to prevent vibration, with no separate Massenaus GmbH.
- the transmission parts themselves, namely the driver can cause an effective mass balance.
- the at least one driver is designed as a sliding joint or coupling joint.
- a particularly simple storage of the driver may result, for example by means of known sliding bearing in a designed as a sliding joint driver or as a joint bearing in a coupling joint executed Takeaway.
- the kinematics of the drive mechanism can be influenced.
- push joints including rotary push joints and coupling joints, have certain translational or rotational degrees of freedom.
- a mechanism can be designed with a precisely determined degree of freedom. This also makes it possible to further reduce component loads and vibrations and thus improve the life of the hand tool and ease of use.
- the hand tool on at least one spring which acts on the at least one driver in the direction of the guide surface.
- spring can be understood to mean metal springs, usually compression, tension, torsion or bending springs, but also spring-loaded elements in other shapes or of other materials. These include, in particular rubber buffer or fluidic springs. It is understood that the resilient elements may also have damping properties, whether material inherent or caused by additional attenuators.
- the at least one driver is provided with a shaped part for engagement in a driving section in the peripheral region of the work spindle.
- the molding and the driving portion can be configured such that it is possible to carry the work spindle both in the outward and during the reciprocation, so when the driver is subjected to pressure or train substantially.
- This entrainment of the work spindle can now be carried out depending on the design of the contact sections involved as rolling, sliding or rolling, wherein as possible by a flat pairing in the contact area, a load distribution to significantly reduce the wear of the component through the intervention.
- the molded part and the driving portion are formed as a corresponding toothing parts, wherein engages at least one tooth in a gap upon engagement of the at least one driver in the work spindle.
- hand tools with oscillatory drive generally perform movements with a small pivoting angle of about 0.5 degrees to 7 degrees, so that provide only a small number of teeth in the peripheral region of the work spindle and on the respective engaging in this driver are, so for example three pairs of gears, particularly preferably two pairs of gears, more preferably only one pair of teeth. Accordingly, the effort to produce the teeth parts decreases, although a pivoting of the work spindle by small angles is safely made possible with the remaining pairs of gears.
- the corresponding toothing parts are designed as involute or cycloidal toothing.
- an involute toothing can be produced particularly easily by machining, since its reference profile generally has straight flanks. Furthermore, it advantageously has a considerable insensitivity to deviations of the axial distance, so that the components and bearings involved can be manufactured and mounted with greater tolerances.
- the molded part is rotationally symmetrical about the at least one driver.
- the driver can be designed as a rotary push joint. Twisting has no effect on the function since, e.g. the molded part in the form of a circumferential tooth remains in engagement with the driving portion at the peripheral region of the work spindle.
- the driver can be stored very easily and inexpensively, a backup against rotation relative to the bearings is not necessary.
- the molded part and the driving portion are designed as corresponding joint parts, in particular as a ball joint or swivel joint.
- a ball joint generally allows pivoting or twisting about three axes, while a hinge, such as a hinge, only allows rotation about an axis.
- the kinematics of the transmission mechanism can thereby also be determined in such a way that a degree of freedom results for the overall mechanism, which allows the generation of an oscillatory movement of the tool spindle, but beyond that is undervalued, so that one here justified wear or attributable thereto vibration or noise is effectively avoided or limited.
- the hand tool on a swash bearing, on which the guide surface is arranged.
- the guide surface is indirectly coupled via bearing elements and a transmission means with the at least one driver, wherein the transmission means is rotationally coupled by the rotating guide surface.
- the transmission means is coupled via a sliding, rolling or rolling contact with the at least one driver.
- the guide surface is formed on a cam.
- the hand tool on two cams with offset contour, which are each coupled to a driver.
- each cam must be designed only to cooperate with a driver, such an arrangement, especially concerning the driver can be realized with low space requirement.
- the cams have identical but offset by 180 degrees contours.
- a need for such a configuration could arise if in terms of the position of the driver or the arrangement of the staggered cam bearing shaft special space limitations or the like must be considered. This can e.g. be the case when the two drivers and the shaft carrying the two cams are not arranged in one plane.
- the one or more cams rotatably formed on a camshaft which is drivable by the drive motor.
- the drive of the cam by means of the camshaft can be done very easily.
- An easily generated rotational movement is converted by the guide surface of the cam in a lifting movement of the driver.
- the camshaft is drivable by the drive motor by means of the motor shaft, wherein the camshaft and the motor shaft are aligned parallel or perpendicular to each other.
- the drive motor it is possible to arrange the drive motor relative to the camshaft and thus in relation to the driver and ultimately the work spindle suitable to make the hand tool compact, lightweight and ergonomic.
- the position of the drive motor also influences the mass distribution and the vibration level in the hand tool, thus can be realized by expedient arrangement, a further reduction of the vibration level.
- Fig. 1 shows a hand tool according to the invention, which is designated in its entirety by 10.
- a housing 12 a switch 14 for activating the hand tool 10
- a gear head 16 as well as a tool 82 rotatably driven by the hand tool 10 are indicated.
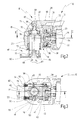
- FIGS. 2 and 3 is such a hand tool 10 according to the invention, as shown in FIG Fig. 1 , shown cut in the region of its gear head, the structure of which will be explained in more detail below.
- a drive motor 22 is arranged with a guided in an engine bearing 23 motor shaft 24.
- a total of 30 designated wobble bearing is flanged.
- a flange 32 and a plate 34 as a coupling member rotatably connected to the motor shaft.
- This compound can be done in a basically known manner, for example by pressing on, by means of a splined connection or the like, with the aid of suitable securing elements, such as feather keys or snap rings.
- the flange 32 and the plate 34 are in Fig. 4 detailed (not to scale) shown in addition.
- the plate 34 has a guide surface 28 which, when circulating about the guide axis 29, which in the embodiment according to the FIGS. 2 and 3 corresponds to the axis through the motor shaft 24, performs a wobbling movement with a designated offset e e.
- How out Fig. 4 can be such a plate 34 with such a flange 32 advantageously made of rotationally symmetrical parts by being tilted about an axis which is perpendicular to the guide shaft 29, and then along the guide shaft 29 an opening 33 for attachment to the motor shaft 24th is introduced.
- the swash bearing 30 is completed by bearing elements 36, a bearing cage or ring 38 and a transmission means 40 with contact surfaces 42.
- the bearing elements 36 may be formed in a basically known manner as balls, rollers or cones, or as sliding elements.
- the transmission means 40 is by means of the recesses designed as contact surfaces 42 in engagement with drivers 44, 46.
- this intervention immediately represents a rotation of the transmission means 40 relative to the plate 34, thus a rotational decoupling of the transmission means 40 is realized.
- a displacement of the driver 44, 46 is limited by the contact surfaces 42 of the transmission means 40, further practice springs 52, 53, which are held by plug members 54, 55 in the gear housing 18, 20, a force on the transmission means 40 facing away End of the driver 44, 46 in the direction of the contact surfaces 42 from.
- a play-free determined by the position of the swash bearing 32 alignment of the driver 44, 46 in the gear head 16th
- the drivers 44, 46 are provided with rotationally symmetrical shaped parts 48, 50, which engage in corresponding driving portions 78, 79 in the peripheral region of a spindle tube 77 of a work spindle 66.
- the positive coupling of the drivers 44, 46 with the swash bearing 30 results in an opposite longitudinal oscillation of the drivers 44, 46.
- the stroke of this longitudinal oscillation essentially corresponds to the offset e, item 35 in FIG Fig. 4
- This longitudinal oscillation takes place via the mold parts 48, 50, designed here as a circumferential gear teeth, entrainment of the work spindle 66 under engagement in the tooth spaces formed as driving portions 78, 79.
- the resulting gear ratios thus correspond essentially those of a toothed rack and a gear meshing gear stage. The difference remains that due to the above-mentioned small required pivot angle of the work spindle 69 only one tooth meshes with a gap.
- the drivers 44, 46 are configured completely or substantially rotationally symmetrical.
- the bearings 56, 58, 60 and 62 can be kept very simple, there are no measures to prevent rotation of the driver 44, 46 required.
- the mold parts 48 and 50 engage in exactly opposite driving portions 78, 79 of the work spindle 66 a.
- the drivers 44, 46 always lead an exactly opposite movement out.
- their mass forces can compensate to a great extent, so that a generation of the rotational oscillation, characterized by the double arrow 69 in FIG Fig. 2 in that working spindle 66 can be made about its longitudinal axis 68 according to the present invention at a significantly reduced level of vibration.
- Fig. 2 further essential parts of the hand tool 10 according to the invention are shown.
- the work spindle 66 is mounted via spindle bearings 70, 72 in the gear head 16 with the gear housings 18, 20 and held axially by a locking ring 74.
- a seal 71 is also provided at the tool-side outlet of the work spindle 66 from the gear head 16.
- the work spindle 66 further includes the spindle tube 77 and a receptacle 80 for receiving the tool 82, which is held by a clamping member 84 thereto.
- the actuation of the tool clamping device takes place in principle from the WO 2005/102605 A1 known manner by means of a pivotable about a pivot axis 88 clamping lever 86.
- the clamping lever 86 has an eccentric path 87, which cooperates with the pivoting thereof with a pressure piece 90.
- the pressure piece 90 is now displaced in the direction of the tool 82 such that a spring tensioning device, not shown here, is released, whereby it is possible to release the clamping element 84 to remove the tool 82 of the receptacle 80 can ,
- Fig. 5 shows one opposite the FIGS. 2 and 3 modified embodiment of a hand tool according to the invention.
- a swash bearing 30 a is provided, which when driven by a motor 22 a later in connection with Fig. 10 described in more detail web movement of a transmission element 40a with flange portions 120, 121 about a guide axis 29 causes. Their movement is transmitted via hinge parts 112, 113, which are guided in receivers 114, 115 of drivers 44a, 46a, to these.
- the joint parts 112, 113 are in the present case designed as ball joints, and thus allow a pivoting of the drivers 44a, 46a relative to the flange parts 120, 121 in any spatial directions.
- Such an indefinite relative movement is achieved by suitable structural design of the mold parts 48a, 50a limited to the peripheral region of the work spindle 66a, so that ultimately a guided coupling movement of the work spindle 66a in the form of a rotational oscillation can be effected by the swash bearing 30a.
- the mold parts 48a, 50a are in the present case designed as a pivot bearing, approximately in the form of hinges.
- cylinder parts 122, 123 in associated cylindrical receptacles 114a, 115a, cf. also Fig. 6 arranged.
- these cylinder parts 122, 123 are secured against rotation, approximately according to the 119 in Fig. 6 indicated against rotation.
- the movement of the dogs 44a, 46a is set so that they according to Fig. 5 can take place only in a plane spanned by the driver 44a, 46a and the guide shaft 29 level.
- FIGS. 7 and 8 a further alternative embodiment of an oscillation drive of a hand tool according to the invention is shown.
- a camshaft 94 rotatably drives a coupling member in the form of cams 96 and 98 connected to it in a rotationally fixed manner.
- the camshaft may be driven directly or indirectly by means of a transmission stage of a drive motor.
- the position of the drive motor relative to the tool spindle 66 can be determined, for example, in order to achieve favorable ergonomics and space requirements for handling.
- the camshaft 84 is guided in bearings 101, 102.
- Such a transmission stage can be designed in particular as a spur gear, bevel gear or worm gear.
- the gearing here is dependent on design criteria such as load capacity, bearing load, running noise avoidance, overlap ratios, manufacturability and life as straight, diagonally, arc or arrow to perform toothing.
- a guide surface is arranged in each case, approximately as in FIG Fig. 8 shown and designated 28b.
- the cams 96, 98 slide by means of their guide surfaces 28b along designed as sliding surfaces transfer members 99, 100 on the end faces of drivers 44b, 46b.
- This pairings can be designed wear with appropriate material and surface design.
- the springs 52, 53 of the embodiments of the invention shown for example as fluidic springs or as metal springs with additional damping or friction members to reduce component loads and vibrations more effectively by suitable spring-damper combination to be able to.
- FIGS. 9 and 10 Another alternative embodiment of a hand tool according to the invention is now in the FIGS. 9 and 10 shown here, whereby also the engagement of molded parts 48, 50 in with these corresponding entrainment sections 78, 79 of a work spindle 66 as far as possible according to the explanations Fig. 3 and Fig. 7 he follows.
- the oscillation drive basically has one Fig. 5 known swash bearing, which in Fig. 10 is shown in section and will be explained in more detail below.
- a guideway 28c is arranged directly on a coupling member 111, which in the present case coincides with a motor shaft 24a. It should be noted that the guideway 28c along the by the arrows XX in Fig. 9 has indicated section plane, that is at an angle to a guide axis 29, a circular cross-section. Accordingly falls in the present case, the motor shaft 24a with a guide surface 28c having coupling member 111 together.
- the swash bearing 30a can also be designed as a separate hub part, in which case the guide surface would be arranged on a bearing inner ring, which would have to be brought into connection with the motor shaft.
- Driving elements 44c, 46c are in turn designed as thrust elements, so that a transmission means 40a in the form of a bearing outer ring of the guide surface 28c is rotatably coupled via circumferential bearing elements 117.
- the drivers 44c, 46c have at their motor-side end receptacles 114b, 115b, which hinge parts 112, 113, which are associated with flange members 120, 121 which are connected to the transmission means 40a.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Wood Science & Technology (AREA)
- Forests & Forestry (AREA)
- Transmission Devices (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Drilling And Boring (AREA)
Abstract
Description
- Die Erfindung betrifft ein Handwerkzeug mit einem Gehäuse, mit einer mit einem Antriebsmotor gekoppelten Motorwelle, mit einer Arbeitsspindel, die um ihre Längsachse drehoszillierend antreibbar ist und mit einem durch die Motorwelle rotatorisch antreibbaren Koppelglied mit einer geschlossenen Führungsfläche, die eine Führungsachse umläuft, wobei die Führungsfläche über Übertragungsmittel mit mindestens einem Mitnehmer zu dessen Antrieb gekoppelt ist.
- Derartige Handwerkzeuge sind im Stand der Technik grundsätzlich bekannt, so aus der
DE 80 31 084 U1 . - Bei dem bekannten Handwerkzeug wird die durch einen Motor erzeugte Rotation einer Motorwelle mittels eines exzentrischen Abschnitts der Motorwelle auf einen Schwinghebel übertragen. Der Schwinghebel ist drehfest mit einer Werkzeugspindel verbunden, so dass eine durch den rotierenden exzentrischen Abschnitt bewirkte Bewegung des Schwinghebels zu einer Drehoszillation der Werkzeugspindel führt.
- Mit einer derartigen Ausgestaltung eines oszillationsgetriebenen Handwerkzeugs kann ein Getriebe zur Erzeugung einer Drehoszillation grundsätzlich verwirklicht werden.
- Aus der
DE 38 40 974 A1 ist ein alternativer Antrieb zur Erzeugung einer Drehoszillation einer Werkzeugspindel bei einem Handwerkzeug gemäß der eingangs genannten Art bekannt. Hierbei wird mittels eines durch einen Motor rotatorisch angetriebenen Taumellagers ein Übertragungshebel in eine Taumelbewegung versetzt. Der Übertragungshebel ist mittels eines die Längsachse einer Werkzeugspindel senkrecht schneidenden Schubgelenks mit der Werkzeugspindel gekoppelt. Durch die Taumelbewegung des Übertragungshebels wird nun die Werkzeugspindel ihrerseits um ihre Längsachse drehoszillierend angetrieben. Da hierbei die Längsachse der Werkzeugspindel und eine Achse einer das Taumellager antreibenden Welle mit fixem Abstand zueinander gelagert sind, führt der Übertragungshebel relativ zur Längsachse neben dem Verschwenken bei gleicher Frequenz eine Schubbewegung entlang des Schubgelenks aus. Darüber hinaus ist das Taumellager entlang eines Wellenprofils seiner Antriebswelle axial verschieblich gehalten, um entsprechend der Dreh- und Schubbewegung des Übertragungshebels durch bzw. um die Längsachse der Werkzeugspindel eine hierzu zwangsgekoppelte axiale Lage auf der Antriebswelle einnehmen zu können. - Mit einem derartigen Handwerkzeug kann zwar prinzipiell in alternativer Weise eine Drehoszillation einer Werkzeugspindel bewirkt werden, jedoch nur unter großem Teileaufwand und bei einem durch die Lage der Elemente zueinander vorgegebenen, für Handwerkzeuge der eingangs genannten Art nachteilig hohen Bedarf an Bauraum. Letzteres ist insbesondere dadurch bedingt, dass die Welle zum Antrieb des Taumellagers, auf der das Taumellager axial verschieblich gelagert ist, senkrecht mit einem durch die Abmessungen das Taumellagers vorgegebenen Mindestabstand zur Längsachse der Werkzeugspindel angeordnet ist. Aus diesem Grund kann ein Antrieb dieser Antriebswelle durch einen Motor, dessen Motorachse vorzugsweise die Längsachse der Werkzeugspindel schneidet, nur unter Berücksichtigung einer zusätzlichen Übertragungsstufe zwischen dem Motor und der Antriebswelle des Taumellagers erfolgen. Darüber hinaus sind vor allem an diejenigen Abschnitte, die die axiale Verschiebbarkeit des Taumellagers auf seiner Antriebswelle bei gleichzeitiger Drehmitnahme des Taumellagers durch die Antriebswelle gewährleisten sollen, höchste Genauigkeitsanforderungen zu stellen, wodurch der Fertigungsaufwand enorm steigt.
- Derartige Handwerkzeuge mit einem Oszillationsantrieb finden vielfältige Verwendung, etwa beim Schleifen, Sägen oder aber auch Schneiden von Werkstücken. Hierbei liegen übliche Oszillationsfrequenzen etwa im Bereich von 5.000 bis 25.000 Oszillationen pro Minute, wobei typische Verschwenkwinkel der Werkzeugspindel etwa zwischen 0,5 Grad und 7 Grad betragen.
- Solchermaßen gestaltete Handwerkzeuge sind hochflexibel und für viele mögliche Anwendungen, Einsatzgebiete und zu verwendende Werkzeuge geeignet. Durch ihre kompakte und leichte Gestalt gestatten Sie es dem Anwender, verschiedenste Griff- bzw. Arbeitspositionen in Bezug auf das Handwerkzeug bzw. das Werkstück einzunehmen. Es hat sich jedoch gezeigt, dass die Handhabung derartiger Handwerkzeuge verbesserungswürdig sein kann, um ein angenehmeres Arbeiten gewährleisten zu können. Hierbei finden vor allem das Gewicht des Handwerkzeugs sowie die auf den Bediener einwirkenden Vibrationen Beachtung.
- Aus der
WO 2008/128804 A1 ist ein weiteres Handwerkzeug gemäß der eingangs genannten Art bekannt, welches zum Schwingungsausgleich eine Massenausgleichseinrichtung aufweist, mit einem in einer Führung verschiebbar gelagerten Hubmassenteil, welches von einem exzentrischen Abschnitt einer Motorwelle beaufschlagt ist. Hierdurch vollzieht das Hubmassenteil eine Schubbewegung, welche im Wesentlichen der Bewegung eines Schwinghebels um eine Werkzeugspindel gegengerichtet ist. - Mit einer derartigen Massenausgleichseinrichtung können die durch den Oszillationsantrieb erzeugten Vibrationen reduziert werden, jedoch steigen damit der Herstellungsaufwand sowie das Gewicht der Handwerkzeugmaschine, ferner kann sich deren Verschleißanfälligkeit erhöhen.
- Vor diesem Hintergrund liegt der Erfindung die Aufgabe zugrunde, einen alternativen, verbesserten Oszillationsantrieb anzugeben, der einfach und zuverlässig aufgebaut ist sowie mit geringem Aufwand herzustellen ist. Möglichst soll hierbei auch eine Reduzierung von Vibrationen erreichbar sein.
- Diese Aufgabe wird bei einem Handwerkzeug gemäß der eingangs genannten Art dadurch gelöst, dass der mindestens eine Mitnehmer relativ zur Arbeitsspindel beweglich gehalten ist und in einen Umfangsbereich der Arbeitsspindel angreift, um diese drehoszillierend anzutreiben.
- Die Aufgabe der Erfindung wird auf diese Weise vollkommen gelöst.
- Erfindungsgemäß wird es nämlich ermöglicht, zwischen dem Mitnehmer und der Arbeitsspindel eine geeignete Verbindung, wie ein Gelenk oder eine Verzahnung, vorzusehen, aufgrund deren Beweglichkeit Toleranzabweichungen der beteiligten und umliegenden Bauteile ausgeglichen werden können. Des Weiteren gestattet der Eingriff des Mitnehmers in einen Umfangsbereich der Arbeitsspindel eine Bauteil schonende, Verschleiß reduzierende Krafteinleitung in die Arbeitsspindel, da sich das durch die Arbeitsspindel zu übertragende Moment durch Einleitung einer relativ geringen Kraft im Umfangsbereich der Arbeitsspindel erzeugen lässt.
- Auf diese Weise können die Bauteilbelastungen reduziert werden, die Lebensdauer des Handwerkzeugs kann sich erhöhen, während eine Verminderung des auf den Bediener einwirkenden Vibrationsniveaus realisiert werden kann.
- In bevorzugter Weiterbildung der Erfindung weist das Handwerkzeug zwei gegenläufig angetriebene Mitnehmer auf.
- Durch diese Maßnahme kann erreicht werden, eine einseitige Bauteilbelastung zu vermeiden. Die Krafteinleitung in die Arbeitsspindel verzweigt, so dass sich hohe örtliche Bauteilbelastungen deutlich reduzieren lassen. Somit können einzelne Bauteile deutlich kleiner und leichter gestaltet sein.
- Die Anordnung zweier gegenläufig angetriebener Mitnehmer kann eine effektive Maßnahme zur Vibrationsvermeidung darstellen, wobei keine separaten Massenausgleichsglieder vorgesehen werden müssen, da die Übertragungsteile selbst, nämlich die Mitnehmer, einen effektiven Massenausgleich bewirken können.
- Vorteilhaft kann sich durch eine derartige Gestaltung ein geschlossener Kraftverlauf ergeben, da die beiden Mitnehmer gewissermaßen durch die Arbeitsspindel derart miteinander gekoppelt sind, dass die Hin- und Herbewegung sowohl durch den Antriebsmotor als auch durch die Arbeitsspindel selbst bedingt ist. Aufwändige konstruktive Lösungen, beispielsweise zur Erzeugung einer Rückstellbewegung der relativ zur Arbeitsspindel beweglich gehaltenen Mitnehmer, können vermieden werden.
- Gemäß einer weiteren Ausgestaltung der Erfindung ist der mindestens eine Mitnehmer als Schubgelenk oder Koppelgelenk ausgebildet.
- Auf diese Weise kann sich eine besonders einfache Lagerung des Mitnehmers ergeben, so z.B. mittels bekannter Gleitlager bei einem als Schubgelenk ausgeführten Mitnehmer oder aber als Gelenklager bei einem als Koppelgelenk ausgeführten Mitnehmer. Vorteilhaft kann hiermit die Kinematik des Antriebsmechanismus beeinflusst werden. Bekanntermaßen weisen Schubgelenke, hierunter fallen auch Drehschubgelenke, und Koppelgelenke bestimmte translatorische oder rotatorische Freiheitsgrade auf. Somit lässt sich bei Berücksichtigung dieser kinematischen Gegebenheiten ein Mechanismus mit einem genau bestimmten Freiheitsgrad gestalten. Auch dadurch wird es ermöglicht, Bauteilbelastungen und Vibrationen weiter zu reduzieren und somit die Lebensdauer des Handwerkzeuges und den Bedienkomfort zu verbessern.
- In vorteilhafter Weiterbildung der Erfindung weist das Handwerkzeug mindestens eine Feder auf, die den mindestens einen Mitnehmer in Richtung auf die Führungsfläche beaufschlagt.
- Durch diese Maßnahme kann ein freies Spiel zwischen dem Mitnehmer, den Übertragungsmitteln und der Arbeitsspindel minimiert oder vorteilhaft ausgeglichen werden. Ein Klappern der Bauteile wird vermieden, wodurch sich der Geräuschpegel und allgemein das Vibrationsniveau deutlich reduzieren lassen. Ebenso kann sich durch den permanent oder nahezu permanent sichergestellten Eingriff oder Kontakt der Elemente eine weitere Minimierung des Bauteilverschleißes ergeben. Eine Rückführung des Mitnehmers in Richtung auf die Führungsfläche wird unterstützt.
- Unter Feder können im Sinne dieser Anmeldung Metallfedern, üblicherweise Druck-, Zug-, Torsions- oder Biegefedern verstanden werden, ebenso aber gefederte Elemente in anderer Gestalt oder aus anderen Werkstoffen. Hierzu zählen insbesondere Gummipuffer oder fluidische Federn. Es versteht sich, dass die federnden Elemente auch dämpfende Eigenschaften, sei es materialimmanent oder durch zusätzliche Dämpfungsglieder bewirkt, aufweisen können.
- In zweckmäßiger Weiterbildung der Erfindung ist der mindestens eine Mitnehmer mit einem Formteil zum Eingriff in einen Mitnahmeabschnitt im Umfangsbereich der Arbeitsspindel versehen.
- Auf diese Weise können das Formteil und der Mitnahmeabschnitt derart ausgestaltet werden, dass es ermöglicht wird, die Arbeitsspindel sowohl bei der Hin- als auch bei der Herbewegung, also wenn der Mitnehmer im Wesentlichen auf Druck oder Zug belastet wird, mitzuführen. Diese Mitnahme der Arbeitsspindel kann nun je nach Gestaltung der beteiligten Kontaktabschnitte als Roll-, Gleit- oder Wälzbewegung erfolgen, wobei möglichst durch eine flächige Paarung im Kontaktbereich eine Lastverteilung erfolgt, um den Bauteilverschleiß durch den Eingriff deutlich zu verringern.
- Gemäß einer Weiterbildung dieser Ausführung sind das Formteil und der Mitnahmeabschnitt als korrespondierende Verzahnungsteile ausgebildet, wobei beim Eingriff des mindestens einen Mitnehmers in die Arbeitsspindel mindestens ein Zahn in einer Lücke eingreift.
- Somit kann ein Eingriff des Mitnehmers in die Arbeitsspindel zur Mitnahme der Arbeitsspindel besonders einfach erfolgen, es lassen sich hierbei Kontaktverhältnisse bewirken, die es ermöglichen, bei hoher realisierbarer Kraftübertragung zugleich die damit einher gehenden Kontaktkräfte zu begrenzen.
- Wie eingangs erwähnt, führen Handwerkzeuge mit Oszillationsantrieb gemäß der eingangs genannten Art im Allgemeinen Bewegungen mit kleinem Verschwenkwinkel von etwa 0,5 Grad bis 7 Grad aus, so dass im Umfangsbereich der Arbeitsspindel und an dem jeweiligen in diesen eingreifenden Mitnehmer nur eine geringe Anzahl Verzahnungsteile vorzusehen sind, so z.B. drei Verzahnungspaare, besonders bevorzugt zwei Verzahnungspaare, weiter bevorzugt nur ein Verzahnungspaar. Dementsprechend sinkt der Aufwand zur Herstellung der Verzahnungsteile, obgleich mit den verbliebenen Verzahnungspaarungen ein Verschwenken der Arbeitsspindel um kleine Winkel sicher ermöglicht ist.
- Gemäß einer Weiterbildung dieser Ausgestaltung sind die korrespondierenden Verzahnungsteile als Evolventen- oder Zykloidenverzahnung ausgeführt.
- Auf diese Weise können zur Herstellung der Verzahnungsteile bekannte, seriengeeignete und günstige Verzahnungsverfahren genutzt werden. Insbesondere eine Evolventenverzahnung lässt sich spanend besonders einfach herstellen, da deren Bezugsprofil im Allgemeinen gerade Flanken aufweist. Des Weiteren verfügt sie vorteilhaft über eine beträchtliche Unempfindlichkeit gegenüber Abweichungen des Achsabstandes, so dass die beteiligten Bauteile und Lagerstellen mit größeren Toleranzen gefertigt und montiert werden können.
- In zweckmäßiger Weiterbildung der Erfindung ist das Formteil rotationssymmetrisch um den mindestens einen Mitnehmer ausgebildet.
- Auf diese Weise kann der Mitnehmer als Drehschubgelenk ausgeführt sein. Eine Verdrehung hat hierbei keine Auswirkung auf die Funktion, da z.B. das Formteil in Form eines umlaufenden Zahns weiterhin im Eingriff mit dem Mitnahmeabschnitt am Umfangsbereich der Arbeitsspindel bleibt. Somit kann der Mitnehmer besonders einfach und kostengünstig gelagert sein, eine Sicherung gegen eine Verdrehung gegenüber den Lagerstellen ist nicht notwendig.
- In alternativer Ausgestaltung der Erfindung sind das Formteil und der Mitnahmeabschnitt als korrespondierende Gelenkteile, insbesondere als Kugelgelenk oder Drehgelenk, ausgeführt.
- Durch diese Maßnahme wird es ermöglicht, den Mitnehmer derart gegenüber der Arbeitsspindel beweglich zu halten, dass die verbliebenen Bewegungsfreiheitsgrade abhängig von der Art und Form des Gelenkes festgelegt werden können. So erlaubt ein Kugelgelenk im Allgemeinen ein Verschwenken oder Verdrehen um drei Achsen, während ein Drehgelenk, etwa ein Scharnier, lediglich eine Verdrehung um eine Achse zulässt. Die Kinematik des Übertragungsmechanismus kann hierdurch auch derart bestimmt werden, dass sich ein Freiheitsgrad für den Gesamtmechanismus ergibt, welcher die Erzeugung einer Oszillationsbewegung der Werkzeugspindel zulässt, darüber hinaus jedoch nicht unter- bzw. überbestimmt ist, so dass ein hierin begründeter Verschleiß bzw. eine darauf zurückzuführende Vibrations- oder Lärmbelastung wirksam vermieden oder begrenzt wird.
- Gemäß einer weiteren Ausgestaltung der Erfindung weist das Handwerkzeug ein Taumellager auf, an dem die Führungsfläche angeordnet ist.
- Auf diese Weise kann die rotatorische Bewegung der Motorwelle besonders einfach in eine Taumelbewegung überführt werden, um dem Mitnehmer antreiben zu können. Dies kann nun mittels bekannter, einfach beschaffbarer sowie kostengünstiger Bauteile erfolgen.
- In vorteilhafter Weiterbildung der Erfindung ist die Führungsfläche mittelbar über Lagerelemente sowie ein Übertragungsmittel mit dem mindestens einen Mitnehmer gekoppelt, wobei das Übertragungsmittel von der umlaufenden Führungsfläche drehentkoppelt ist.
- Somit werden nach der Drehentkopplung nur bestimmte Anteile der Bewegung des Antriebsmotors über das Koppelglied auf den Mitnehmer übertragen. Infolgedessen wirken vor allem auf den Mitnehmer gerichtete Komponenten auf diesen ein, während rotatorische Anteile der Bewegung der Führungsfläche nach Möglichkeit weitestgehend ausgefiltert sind. Hierdurch lassen sich Relativbewegungen der Führungsfläche gegenüber dem Übertragungsmittel wirksam reduzieren, der damit einhergehende Verschleiß, insbesondere aufgrund von Gleitpaarungen, sinkt.
- In bevorzugter Weiterbildung dieser Ausgestaltung ist das Übertragungsmittel über einen Gleit-, Wälz- oder Rollkontakt mit dem mindestens einen Mitnehmer gekoppelt.
- Durch diese Maßnahme kann bewirkt werden, mittels geeigneter Werkstoffe oder Komponenten für derartige Kontaktpaarungen, etwa Kugeln, Rollen und Schmierstoffen, oder geeigneter Oberflächenbehandlungs- oder Beschichtungsverfahren, wie z.B. Einsatzhärtungen oder PTFE-Beschichtungen, die beteiligten Bauteile verschleißhemmend oder verschleißmindernd zu gestalten. Es versteht sich, dass Wälzpaarungen, insbesondere jedoch Rollpaarungen gegenüber reinen Gleitpaarungen bevorzugt sind.
- Gemäß einer weiteren Ausgestaltung der Erfindung ist die Führungsfläche an einem Nocken ausgebildet.
- Somit wird es ermöglicht, die Führungsfläche durch Veränderung der Nockenkontur geeignet zu beeinflussen, so z.B., zur Erzielung stetiger Krümmungsübergänge, um Stoß- oder Druckbelastungen bei der Kopplung der umlaufenden Führungsfläche mit dem Mitnehmer zu reduzieren oder zu vermeiden.
- In bevorzugter Weiterbildung dieser Ausführung weist das Handwerkzeug zwei Nocken mit versetzter Kontur auf, die jeweils mit einem Mitnehmer gekoppelt sind.
- Auf diese Weise kann es besonders einfach realisiert werden, zwei Mitnehmer gegenläufig anzutreiben. Da somit jeder Nocken nur zum Zusammenwirken mit einem Mitnehmer ausgebildet sein muss, kann eine derartige Anordnung, vor allem die Mitnehmer betreffend, bei geringem Bauraumbedarf realisiert werden. Bevorzugt weisen die Nocken identische, aber um 180 Grad versetzte Konturen auf. Für besondere Anwendungsfälle ist es denkbar, zwei verschiedene Nockenkonturen oder aber einen von 180 Grad verschiedenen Versatz vorzusehen. Ein Bedarf an einer derartigen Ausgestaltung könnte entstehen, wenn hinsichtlich der Lage der Mitnehmer bzw. der Anordnung der die versetzten Nocken tragenden Welle besondere Bauraumbeschränkungen oder dergleichen beachtet werden müssen. Dies kann z.B. der Fall sein, wenn die beiden Mitnehmer und die die beiden Nocken tragenden Welle nicht in einer Ebene angeordnet sind.
- In vorteilhafter Weiterbildung dieser Ausgestaltung sind der oder die Nocken drehfest an einer Nockenwelle ausgebildet, die von dem Antriebsmotor antreibbar ist.
- Durch diese Maßnahme kann der Antrieb der Nocken mittels der Nockenwelle besonders einfach erfolgen. Eine leicht zu erzeugende Rotationsbewegung wird durch die Führungsfläche der Nocken in eine Hubbewegung der Mitnehmer überführt.
- In bevorzugter Weiterbildung dieser Ausgestaltung ist die Nockenwelle von dem Antriebsmotor mittels der Motorwelle antreibbar, wobei die Nockenwelle und die Motorwelle parallel oder senkrecht zueinander ausgerichtet sind.
- Auf diese Weise wird es ermöglicht, den Antriebsmotor gegenüber der Nockenwelle und somit in Bezug auf die Mitnehmer und letztlich die Arbeitsspindel geeignet anzuordnen, um das Handwerkzeug kompakt, leichtgewichtig und ergonomisch zu gestalten. Die Lage des Antriebsmotors beeinflusst ebenso die Masseverteilung und das Schwingungsniveau im Handwerkzeug, folglich kann durch zweckdienliche Anordnung eine weitere Reduktion des Vibrationsniveaus realisiert werden.
- Es versteht sich, dass die vorstehend genannten und die nachstehend noch zu erläuternden Merkmale der Erfindung nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar sind, ohne den Rahmen der vorliegenden Erfindung zu verlassen.
- Weitere Merkmale und Vorteile der Erfindung ergeben sich aus der nachfolgenden Beschreibung mehrerer bevorzugter Ausführungsbeispiele unter Bezugnahme auf die Zeichnungen. Es zeigen:
- Figur 1
- eine perspektivische Ansicht eines erfindungsgemäßen Handwerkzeugs;
- Figur 2
- einen Schnitt durch ein erfindungsgemäßes Handwerkzeug im Bereich seines Getriebekopfes entlang der Linie I-I gemäß
Figur 3 ; - Figur 3
- einen Schnitt durch das Handwerkzeug gemäß
Figur 2 entlang der Linie II-II; - Figur 4
- eine vergrößerte Darstellung eines Teilschnitts durch ein Koppelglied in Form eines Tellers, etwa gemäß
Figur 2 oder Figur 3 ; - Figur 5
- eine schematische Darstellung eines Oszillationsgetriebes einer alterna- tiven Ausführungsform eines erfindungsgemäßen Handwerkzeugs;
- Figur 6
- einen Teilschnitt durch das Handwerkzeug gemäß
Figur 5 entlang der Linie VI-VI; - Figur 7
- eine schematische Darstellung eines Oszillationsgetriebes einer weite- ren alternativen Ausführungsform eines erfindungsgemäßen Hand- werkzeugs;
- Figur 8
- einen Teilschnitt durch das Handwerkzeug gemäß
Figur 7 entlang der Linie VIII-VIII im Bereich eines Nockens; - Figur 9
- eine schematische Darstellung eines Oszillationsgetriebes einer weite- ren alternativen Ausführungsform eines erfindungsgemäßen Hand- werkzeugs; und
- Figur 10
- einen Teilschnitt durch das Handwerkzeug gemäß
Figur 9 entlang der Linie X-X im Bereich eines Taumellagers. -
Fig. 1 zeigt ein erfindungsgemäßes Handwerkzeug, welches in seiner Gesamtheit mit 10 bezeichnet ist. Hierbei sind ein Gehäuse 12, ein Schalter 14 zum Aktivieren des Handwerkzeugs 10, ein Getriebekopf 16 sowie ein durch das Handwerkzeug 10 drehoszillierend antreibbares Werkzeug 82 angedeutet. - In den
Fig. 2 und 3 ist ein derartiges erfindungsgemäßes Handwerkzeug 10, etwa gemäß der Darstellung inFig. 1 , im Bereich seines Getriebekopfes geschnitten dargestellt, wobei dessen Aufbau nachfolgend näher erläutert werden soll. - Im Gehäuse 12 ist ein Antriebsmotor 22 mit einer in einem Motorlager 23 geführten Motorwelle 24 angeordnet. Am werkzeugseitigen Ende der Motorwelle 24 ist ein insgesamt mit 30 bezeichnetes Taumellager angeflanscht. Hierbei sind ein Flanschteil 32 sowie ein Teller 34 als Koppelglied drehfest mit der Motorwelle verbunden. Diese Verbindung kann in grundsätzlich bekannter Weise, etwa durch Aufpressen, mittels einer Keilwellenverbindung oder Ähnlichem, unter Zuhilfenahme geeigneter Sicherungselemente, wie Passfedern oder Sprengringen, erfolgen.
- Das Flanschteil 32 sowie der Teller 34 sind in
Fig. 4 detailliert (nicht maßstabsgerecht) ergänzend dargestellt. Der Teller 34 weist eine Führungsfläche 28 auf, die beim Umlaufen um die Führungsachse 29, die in der Ausgestaltung gemäß derFig. 2 und 3 der Achse durch die Motorwelle 24 entspricht, eine Taumelbewegung mit einem mit 35 bezeichneten Versatz e ausführt. Wie ausFig. 4 ersichtlich, kann ein derartiger Teller 34 mit einem derartigen Flanschteil 32 vorteilhaft aus rotationssymmetrischen Teilen gefertigt werden, indem diese um eine Achse verkippt werden, welche senkrecht zu der Führungsachse 29 liegt, und anschließend entlang der Führungsachse 29 eine Öffnung 33 zur Befestigung an der Motorwelle 24 eingebracht wird. - Nach der Montage des Taumellagers 30 ergibt sich eine in den
Fig. 2 und 3 gezeigte Anordnung der übrigen hierzu gehörigen Bauelemente. Das Taumellager 30 wird komplettiert durch Lagerelemente 36, einen Lagerkäfig oder -kranz 38 sowie ein Übertragungsmittel 40 mit Kontaktflächen 42. Die Lagerelemente 36 können in grundsätzlich bekannter Weise als Kugeln, Rollen oder Kegel, oder aber als Gleitelemente ausgebildet sein. Das Übertragungsmittel 40 ist mittels der als Ausnehmungen ausgeführten Kontaktflächen 42 im Eingriff mit Mitnehmern 44, 46. Vorteilhaft stellt dieser Eingriff sogleich eine Verdrehsicherung des Übertragungsmittel 40 gegenüber dem Teller 34 dar, somit ist eine Drehentkopplung des Übertragungsmittels 40 realisiert. - Wie anhand der
Fig. 2 und 3 zu erkennen ist, sind die Mitnehmer 44, 46 von einem oberen Getriebegehäuse 18 sowie einem unteren Getriebegehäuse 20 über Lagerstellen 56, 58, 60 und 62 verschiebbar aufgenommen. Entlang ihrer Längsrichtung ist eine Verschiebung der Mitnehmer 44, 46 durch die Kontaktflächen 42 des Übertragungsmittel 40 begrenzt, des Weiteren üben Federn 52, 53, welche durch Stopfenelemente 54, 55 im Getriebegehäuse 18, 20 gehalten sind, eine Kraft auf das dem Übertragungsmittel 40 abgewandte Ende der Mitnehmer 44, 46 in Richtung auf die Kontaktflächen 42 aus. Auf diese Weise ergibt sich eine spielfreie, durch die Stellung des Taumellagers 32 bestimmte Ausrichtung der Mitnehmer 44, 46 im Getriebekopf 16. - Die Mitnehmer 44, 46 sind mit rotationssymmetrischen Formteilen 48, 50 versehen, welche in korrespondierende Mitnahmeabschnitte 78, 79 im Umfangsbereich eines Spindelrohrs 77 einer Arbeitsspindel 66 eingreifen. Die Zwangskopplung der Mitnehmer 44, 46 mit dem Taumellager 30 resultiert in einer gegenläufigen Längsoszillation der Mitnehmer 44, 46. Der Hub dieser Längsoszillation entspricht im Wesentlichen dem Versatz e, Ziffer 35 gemäß
Fig. 4 beim Umlauf des Tellers 34 des Taumellagers 30. Während dieser Längsoszillation erfolgt nun über die Formteile 48, 50, hier als umlaufende Getriebezähne ausgebildet, eine Mitnahme der Arbeitsspindel 66 unter Eingriff in die als Zahnlücken ausgebildeten Mitnahmeabschnitte 78, 79. Die sich ergebenden Verzahnungsverhältnisse entsprechen somit im Wesentlichen denen einer aus einer Zahnstange und einem Zahnrad zusammengesetzten Verzahnungsstufe. Als Unterschied verbleibt, dass aufgrund der vorstehend erwähnten kleinen benötigten Verschwenkwinkel der Arbeitsspindel 69 nur ein Zahn mit einer Lücke kämmt. - Im gezeigten Ausführungsbeispiel gemäß der
Fig. 2 und 3 sind die Mitnehmer 44, 46 vollständig oder im Wesentlichen rotationssymmetrisch ausgestaltet. Somit können die Lager 56, 58, 60 und 62 besonders einfach gehalten sein, es sind keine Maßnahmen zur Verdrehsicherung der Mitnehmer 44, 46 erforderlich. - Wie aus
Fig. 3 ersichtlich, greifen die Formteile 48 bzw. 50 in sich genau gegenüberliegende Mitnahmeabschnitte 78, 79 der Arbeitsspindel 66 ein. Während ihrer Längsoszillationen führen die Mitnehmer 44, 46 immer eine genau gegenläufige Bewegung aus. Somit können sich deren Massenkräfte in hohem Maße kompensieren, so dass eine Erzeugung der Drehoszillation, gekennzeichnet durch den Doppelpfeil 69 inFig. 2 , der Arbeitsspindel 66 um ihre Längsachse 68 gemäß der vorliegenden Erfindung bei deutlich reduziertem Vibrationsniveau erfolgen kann. - In
Fig. 2 sind weitere wesentliche Teile des erfindungsgemäßen Handwerkzeugs 10 dargestellt. Die Arbeitsspindel 66 ist über Spindellager 70, 72 im Getriebekopf 16 mit den Getriebegehäusen 18, 20 gelagert und über einen Sicherungsring 74 axial gehalten. Am werkzeugseitigen Austritt der Arbeitsspindel 66 aus dem Getriebekopf 16 ist ferner eine Dichtung 71 vorgesehen. Der Arbeitsspindel 66 zugehörig sind des Weiteren das Spindelrohr 77 und eine Aufnahme 80 zur Aufnahme des Werkzeugs 82, das mittels eines Klemmelements 84 an dieser gehalten ist. - Die Betätigung der Werkzeugspannvorrichtung erfolgt in grundsätzlich aus der
WO 2005/102605 A1 bekannter Weise mittels eines um eine Schwenkachse 88 verschwenkbaren Spannhebels 86. Der Spannhebel 86 weist eine Exzenterbahn 87 auf, welche bei deren Verschwenken mit einem Druckstück 90 zusammenwirkt. Beim Umlegen des Spannhebels 86 wird nun das Druckstück 90 in Richtung des Werkzeugs 82 derart verlagert, dass eine hier nicht näher dargestellte Federspanneinrichtung gelöst wird, wodurch es ermöglicht ist, das Klemmelement 84 zu lösen, um das Werkzeug 82 von der Aufnahme 80 entfernen zu können. -
Fig. 5 zeigt eine gegenüber denFig. 2 und 3 abgewandelte Ausführungsform eines erfindungsgemäßen Handwerkzeugs. Hierbei ist ein Taumellager 30a vorgesehen, welches bei Antrieb durch einen Motor 22 eine später in Zusammenhang mitFig. 10 näher dargelegte Bahnbewegung eines Übertragungselements 40a mit Flanschteilen 120, 121 um eine Führungsachse 29 bewirkt. Deren Bewegung wird über Gelenkteile 112, 113, welche in Aufnahmen 114, 115 von Mitnehmern 44a, 46a geführt sind, auf diese übertragen. Die Gelenkteile 112, 113 sind vorliegend als Kugelgelenke ausgeführt, und erlauben folglich eine Verschwenkung der Mitnehmer 44a, 46a gegenüber den Flanschteilen 120, 121 in beliebige Raumrichtungen. Eine derart unbestimmte Relativbewegung wird durch geeignete konstruktive Gestaltung der Formteile 48a, 50a am Umfangsbereich der Arbeitsspindel 66a begrenzt, so dass letztlich eine geführte Koppelbewegung der Arbeitsspindel 66a in Form einer Drehoszillation durch das Taumellager 30a bewirkt werden kann. - Die Formteile 48a, 50a sind vorliegend als Drehlager, etwa in Form von Scharnieren, ausgeführt. Hierzu sind Zylinderteile 122, 123 in zugeordnete zylindrische Aufnahmen 114a, 115a, vgl. auch
Fig. 6 , angeordnet. Gegenüber den den Mitnahmeabschnitten 79a, 79b der Arbeitsspindel 66a zugeordneten Flanschteilen 120a, 121a sind diese Zylinderteile 122, 123 verdrehgesichert, etwa gemäß der mit 119 inFig. 6 angedeuteten Verdrehsicherung. Somit ist die Bewegung der Mitnehmer 44a, 46a derart festgelegt, dass sie gemäßFig. 5 nur in einer durch die Mitnehmer 44a, 46a und die Führungsachse 29 aufgespannten Ebene erfolgen kann. - In den
Fig. 7 und 8 ist eine weitere alternative Ausführungsform eines Oszillationsantriebs eines erfindungsgemäßen Handwerkzeugs gezeigt. Eine Nockenwelle 94 treibt rotatorisch ein mit ihr drehfest verbundenes Koppelglied in Form von Nocken 96 und 98 an. In bekannter Weise (inFig. 7 nicht dargestellt) kann die Nockenwelle direkt oder indirekt mittels einer Übertragungsstufe von einem Antriebsmotor angetrieben sein. Durch geeignete Wahl dieser Übertragungsstufe kann die Lage des Antriebsmotors gegenüber der Werkzeugspindel 66 bestimmt werden, etwa um für die Handhabung günstige Ergonomie- und Bauraumverhältnisse erreichen zu können. Die Nockenwelle 84 ist in Lagerstellen 101, 102 geführt. - Eine derartige Übertragungsstufe kann insbesondere als Stirnradgetriebe, Kegelradgetriebe oder Schneckenradgetriebe ausgeführt sein. Die Verzahnung ist hierbei abhängig von Auslegungskriterien wie Tragfähigkeit, Lagerbelastung, Laufgeräuschvermeidung, Überdeckungsverhältnissen, Herstellbarkeit sowie Lebensdauer als Gerad-, Schräg-, Bogen- oder Pfeilverzahnung auszuführen.
- Am Umfang der Nocken 96, 98 ist jeweils eine Führungsfläche angeordnet, etwa wie in
Fig. 8 gezeigt und mit 28b bezeichnet. Beim Umlaufen um die Nockenwelle 94, durch den mit 104 bezeichneten Pfeil angedeutet, gleiten die Nocken 96, 98 mittels ihrer Führungsflächen 28b entlang von als Gleitflächen ausgeführten Übertragungsgliedern 99, 100 an den Stirnseiten von Mitnehmern 44b, 46b. Diese Gleitpaarungen können bei geeigneter Werkstoff- und Oberflächenauslegung verschleißarm gestaltet sein. Alternativ ist denkbar, die Mitnehmer 44b, 46b beispielsweise als Rollenstößel oder als Kugelstößel auszuführen, so dass statt einer gleitenden Relativbewegung prinzipiell verschleißärmere Roll- oder Wälzbewegungen zwischen den Nocken 96, 98 und den Mitnehmern 44b, 46b auftreten. - Analog zu der in den
Fig. 2 und 3 gezeigten Ausführungsform sind auch in der Ausführungsform gemäßFig. 7 die Mitnehmer 44b, 46b durch Federn 52, 53 in Richtung auf die Führungsflächen 28b beaufschlagt. Auf diese Weise werden Toleranzen ausgeglichen sowie ein Klappern vermieden, es können Vibrationen bzw. die Geräuschentwicklung minimiert werden. - Wie vorstehend ausgeführt, ist es ausdrücklich denkbar, die Federn 52, 53 der gezeigten Ausgestaltungen der Erfindung beispielsweise als fluidische Federn oder aber als Metallfedern mit zusätzlichen Dämpfungs- oder Reibungsgliedern zu versehen, um durch geeignete Feder-Dämpfer-Kombination Bauteilbelastungen und Schwingungen noch wirksamer reduzieren zu können.
- Durch den Umlauf der Nocken 96, 98 werden die Mitnehmer 44b, 46b in gegenläufig gerichtete, durch Doppelpfeile 106, 108 bezeichnete längsoszillierende Bewegungen versetzt. Der Eingriff von an den Mitnehmern 44b, 46b vorgesehenen Formteilen 48, 50 in korrespondierende Mitnahmeabschnitte 78, 79 an der Arbeitsspindel 66 zur Bewirkung einer durch den Doppelpfeil 110 angedeuteten Drehoszillationsbewegung erfolgt analog zu den Darlegungen zu
Fig. 3 . - Eine weitere alternative Ausführungsform eines erfindungsgemäßen Handwerkzeugs ist nun in den
Fig. 9 und 10 dargestellt, wobei auch hier der Eingriff von Formteilen 48, 50 in mit diesen korrespondierende Mitnahmeabschnitte 78, 79 einer Arbeitsspindel 66 weitestgehend gemäß der Darlegungen zuFig. 3 undFig. 7 erfolgt. - Der Oszillationsantrieb weist ein grundsätzlich aus
Fig. 5 bekanntes Taumellager auf, welches inFig. 10 im Schnitt dargestellt ist und nachfolgend näher erläutert werden soll. Eine Führungsbahn 28c ist direkt an einem Koppelglied 111 angeordnet, welches vorliegend mit einer Motorwelle 24a zusammenfällt. Hierbei ist zu beachten, dass die Führungsbahn 28c entlang der durch die Pfeile X-X inFig. 9 angedeuteten Schnittebene, also unter einem Winkel zu einer Führungsachse 29, einen Kreisquerschnitt aufweist. Dementsprechend fällt im vorliegenden Fall die Motorwelle 24a mit einem die Führungsfläche 28c aufweisenden Koppelglied 111 zusammen. - In grundsätzlich bekannter Weise kann das Taumellager 30a auch als separates Nabenteil ausgeführt sein, hierbei wäre die Führungsfläche auf einem Lagerinnenring angeordnet, welcher mit der Motorwelle in Verbindung gebracht werden müsste.
- Mitnehmerelemente 44c, 46c sind wiederum als Schubelemente ausgeführt, so dass ein Übertragungsmittel 40a in Form eines Lageraußenrings von der Führungsfläche 28c über umlaufende Lagerelemente 117 drehentkoppelt ist. Die Mitnehmer 44c, 46c weisen an ihrem motorseitigen Ende Aufnahmen 114b, 115b auf, denen Gelenkteile 112, 113, welche mit Flanschteilen 120, 121, die mit dem Übertragungsmittel 40a verbunden sind, zugeordnet sind. Da nun die Aufnahmen 114, 115b eine Lageorientierung der Gelenkteile 112, 113 sowohl in Druck- als auch in Zugrichtung gewährleisten, ist bei dieser Ausgestaltung eine formschlüssige Koppelbewegung gewährleistet, so dass auf zusätzliche Federelemente, die die Mitnehmer 44c, 46c in Richtung auf die Führungsfläche 28c beaufschlagen würden, verzichtet werden kann.
- Im Rahmen der Erfindung ist es gelungen, einen verbesserten Oszillationsantrieb anzugeben, der neben einem einfachen Aufbau weiterführende Möglichkeiten zur Gewichtsreduzierung, zum Beispiel durch verzweigte Kraftleitung, zur Geräuschminimierung, etwa durch kraftbedingte Zwangskopplung an Wirkflächen, sowie zur Vibrationsreduzierung, beispielsweise durch gegenläufige Mitnehmer, eröffnet. Durch diese Maßnahmen kann sich die Handhabung von Oszillationswerkzeugen erleichtern sowie deren Bedienkomfort weiter verbessern.
Claims (16)
- Handwerkzeug mit einem Gehäuse (12), mit einer mit einem Antriebsmotor (22) gekoppelten Motorwelle (24), mit einer Arbeitsspindel (66), die um ihre Längsachse (68) drehoszillierend antreibbar ist und mit einem durch die Motorwelle (24) rotatorisch antreibbaren Koppelglied (34, 96, 98, 111) mit einer geschlossenen Führungsfläche (28), die eine Führungsachse (29) umläuft, wobei die Führungsfläche (28) über Übertragungsmittel (40, 99, 100) mit mindestens einem Mitnehmer (44, 46) zu dessen Antrieb gekoppelt ist, dadurch gekennzeichnet, dass der mindestens eine Mitnehmer (44, 46) relativ zur Arbeitsspindel (66) beweglich gehalten ist und in einen Umfangsbereich der Arbeitsspindel (66) angreift, um diese drehoszillierend anzutreiben.
- Handwerkzeug (10) nach Anspruch 1, gekennzeichnet durch zwei gegenläufig angetriebene Mitnehmer (44, 46).
- Handwerkzeug (10) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass der mindestens eine Mitnehmer (44, 46) als Schubgelenk oder Koppelgelenk ausgebildet ist.
- Handwerkzeug (10) nach einem der vorhergehenden Ansprüche, gekennzeichnet durch mindestens eine Feder (52, 53), die den mindestens einen Mitnehmer (44, 46) in Richtung auf die Führungsfläche (28) beaufschlagt.
- Handwerkzeug (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der mindestens eine Mitnehmer (44, 46) mit einem Formteil (48, 50) zum Eingriff in einen Mitnahmeabschnitt (78, 79) im Umfangsbereich der Arbeitsspindel (66) versehen ist.
- Handwerkzeug (10) nach Anspruch 5, dadurch gekennzeichnet, dass das Formteil (48, 50) und der Mitnahmeabschnitt (78, 79) als korrespondierende Verzahnungsteile ausgebildet sind, wobei beim Eingriff des mindestens einen Mitnehmers (48, 50) in die Arbeitsspindel (66) mindestens ein Zahn in eine Lücke eingreift.
- Handwerkzeug (10) nach Anspruch 6, dadurch gekennzeichnet, dass die korrespondierenden Verzahnungsteile als Evolventen- oder Zykloidenverzahnung ausgeführt sind.
- Handwerkzeug (10) nach Anspruch 5 oder 6, dadurch gekennzeichnet, dass das Formteil (48, 50) rotationssymmetrisch um den mindestens einen Mitnehmer (44, 46) ausgebildet ist.
- Handwerkzeug (10) nach Anspruch 5, dadurch gekennzeichnet, dass das Formteil (48, 50) und der Mitnahmeabschnitt (78, 79) als korrespondierende Gelenkteile, insbesondere als Kugelgelenk oder Drehgelenk ausgeführt sind.
- Handwerkzeug (10) nach einem der vorhergehenden Ansprüche, gekennzeichnet durch ein Taumellager (30), an dem die Führungsfläche (28) angeordnet ist.
- Handwerkzeug (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Führungsfläche (28) mittelbar über Lagerelemente (36, 117) sowie das Übertragungsmittel (40) mit dem mindestens einen Mitnehmer (44, 46) gekoppelt ist, wobei das Übertragungsmittel (40) von der umlaufenden Führungsfläche (28) drehentkoppelt ist.
- Handwerkzeug (10) nach Anspruch 11, dadurch gekennzeichnet, dass das Übertragungsmittel (40) über einen Gleit-, Wälz- oder Rollkontakt mit dem mindestens einen Mitnehmer (44, 46) gekoppelt ist.
- Handwerkzeug (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Führungsfläche (28) an einem Nocken (96, 98) ausgebildet ist.
- Handwerkzeug (10) nach Anspruch 13, gekennzeichnet durch zwei Nocken (96, 98) mit versetzter Kontur, die jeweils mit einem Mitnehmer (44, 46) gekoppelt sind.
- Handwerkzeug (10) nach Anspruch 13 oder 14, dadurch gekennzeichnet, dass der oder die Nocken (96, 98) drehfest an einer Nockenwelle (94) ausgebildet sind, die von dem Antriebsmotor (22) antreibbar ist.
- Handwerkzeug (10) nach Anspruch 15, dadurch gekennzeichnet, dass die Nockenwelle (94) von dem Antriebsmotor (22) mittels der Motorwelle (24) antreibbar ist, wobei die Nockenwelle (94) und die Motorwelle (24) parallel oder senkrecht zueinander ausgerichtet sind.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202009011312U DE202009011312U1 (de) | 2009-08-11 | 2009-08-11 | Handwerkzeug mit einem Oszillationsantrieb |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2283979A2 true EP2283979A2 (de) | 2011-02-16 |
| EP2283979A3 EP2283979A3 (de) | 2013-04-17 |
| EP2283979B1 EP2283979B1 (de) | 2015-07-08 |
Family
ID=43064599
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10171089.5A Active EP2283979B1 (de) | 2009-08-11 | 2010-07-28 | Handwerkzeug mit einem Oszillationsantrieb |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8397832B2 (de) |
| EP (1) | EP2283979B1 (de) |
| CN (1) | CN101992459B (de) |
| DE (1) | DE202009011312U1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202013011687U1 (de) | 2013-11-13 | 2015-02-23 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
| DE102013112455A1 (de) | 2013-11-13 | 2015-05-13 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
Families Citing this family (419)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11998198B2 (en) | 2004-07-28 | 2024-06-04 | Cilag Gmbh International | Surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US7665647B2 (en) | 2006-09-29 | 2010-02-23 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling device with closure apparatus for limiting maximum tissue compression force |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8840603B2 (en) | 2007-01-10 | 2014-09-23 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US20080169333A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Surgical stapler end effector with tapered distal end |
| US7669747B2 (en) | 2007-03-15 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Washer for use with a surgical stapling instrument |
| US11564682B2 (en) | 2007-06-04 | 2023-01-31 | Cilag Gmbh International | Surgical stapler device |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US10390823B2 (en) | 2008-02-15 | 2019-08-27 | Ethicon Llc | End effector comprising an adjunct |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| BRPI1008667A2 (pt) | 2009-02-06 | 2016-03-08 | Ethicom Endo Surgery Inc | aperfeiçoamento do grampeador cirúrgico acionado |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| DE102009054929B4 (de) | 2009-12-18 | 2022-08-11 | Robert Bosch Gmbh | Handwerkzeugmaschinenvorrichtung |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| DE102010039637A1 (de) * | 2010-08-23 | 2012-02-23 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einem Spannhals |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9351730B2 (en) | 2011-04-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising channels |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9301755B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Compressible staple cartridge assembly |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9592050B2 (en) | 2010-09-30 | 2017-03-14 | Ethicon Endo-Surgery, Llc | End effector comprising a distal tissue abutment member |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| DE102011015117A1 (de) * | 2011-03-22 | 2012-09-27 | C. & E. Fein Gmbh | Handwerkzeug |
| BR112013027794B1 (pt) | 2011-04-29 | 2020-12-15 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| EP2556922B1 (de) * | 2011-08-09 | 2014-03-19 | C. & E. Fein GmbH | Kraftgetriebenes Handwerkzeug |
| JP5821476B2 (ja) * | 2011-09-28 | 2015-11-24 | 日立工機株式会社 | 振動工具 |
| US8881409B2 (en) * | 2012-01-16 | 2014-11-11 | Robert Bosch Gmbh | Articulating oscillating power tool |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| JP2013169623A (ja) * | 2012-02-21 | 2013-09-02 | Makita Corp | 作業工具 |
| BR112014024194B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos para um grampeador cirúrgico |
| CN104334098B (zh) | 2012-03-28 | 2017-03-22 | 伊西康内外科公司 | 包括限定低压强环境的胶囊剂的组织厚度补偿件 |
| JP2013202734A (ja) * | 2012-03-28 | 2013-10-07 | Hitachi Koki Co Ltd | 動力工具 |
| RU2014143258A (ru) | 2012-03-28 | 2016-05-20 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, содержащий множество слоев |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| RU2636861C2 (ru) | 2012-06-28 | 2017-11-28 | Этикон Эндо-Серджери, Инк. | Блокировка пустой кассеты с клипсами |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US11197671B2 (en) | 2012-06-28 | 2021-12-14 | Cilag Gmbh International | Stapling assembly comprising a lockout |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9561569B2 (en) | 2012-12-31 | 2017-02-07 | Robert Bosch Tool Corporation | Wobble drive for an oscillating tool |
| DE102013100085A1 (de) | 2013-01-07 | 2014-07-10 | C. & E. Fein Gmbh | Oszillierend angetriebene Werkzeugmaschine |
| RU2669463C2 (ru) | 2013-03-01 | 2018-10-11 | Этикон Эндо-Серджери, Инк. | Хирургический инструмент с мягким упором |
| RU2672520C2 (ru) | 2013-03-01 | 2018-11-15 | Этикон Эндо-Серджери, Инк. | Шарнирно поворачиваемые хирургические инструменты с проводящими путями для передачи сигналов |
| US9883860B2 (en) | 2013-03-14 | 2018-02-06 | Ethicon Llc | Interchangeable shaft assemblies for use with a surgical instrument |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9801626B2 (en) | 2013-04-16 | 2017-10-31 | Ethicon Llc | Modular motor driven surgical instruments with alignment features for aligning rotary drive shafts with surgical end effector shafts |
| DE102013104271A1 (de) * | 2013-04-26 | 2014-10-30 | C. & E. Fein Gmbh | Werkzeugmaschine |
| US9555554B2 (en) | 2013-05-06 | 2017-01-31 | Milwaukee Electric Tool Corporation | Oscillating multi-tool system |
| DE102013212714B4 (de) | 2013-06-28 | 2024-09-26 | Robert Bosch Gmbh | Handwerkzeugmaschinenantriebsvorrichtung |
| US20150053746A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | Torque optimization for surgical instruments |
| JP6416260B2 (ja) | 2013-08-23 | 2018-10-31 | エシコン エルエルシー | 動力付き外科用器具のための発射部材後退装置 |
| WO2015031795A1 (en) * | 2013-08-30 | 2015-03-05 | Robert Bosch Gmbh | Power tool with accessory change tool storage |
| US10709452B2 (en) | 2013-09-23 | 2020-07-14 | Ethicon Llc | Methods and systems for performing circular stapling |
| US20150083772A1 (en) * | 2013-09-23 | 2015-03-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with rotary cam drive and return |
| WO2015051418A1 (en) * | 2013-10-10 | 2015-04-16 | Arbortech Industries Limited | Rotary gear transmission for tools |
| EP3083172A1 (de) * | 2013-12-20 | 2016-10-26 | Robert Bosch GmbH | Oszillierender mechanismus für ein elektrowerkzeug |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| US9820738B2 (en) | 2014-03-26 | 2017-11-21 | Ethicon Llc | Surgical instrument comprising interactive systems |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9826977B2 (en) | 2014-03-26 | 2017-11-28 | Ethicon Llc | Sterilization verification circuit |
| US10150210B2 (en) * | 2014-04-04 | 2018-12-11 | Robert Bosch Tool Corporation | Power hand tool with improved oscillating eccentric and fork mechanism |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| US20150297225A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| US9801628B2 (en) | 2014-09-26 | 2017-10-31 | Ethicon Llc | Surgical staple and driver arrangements for staple cartridges |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| DE102014212794A1 (de) * | 2014-07-02 | 2016-01-07 | Robert Bosch Gmbh | Oszillationsantriebsvorrichtung |
| US10016199B2 (en) | 2014-09-05 | 2018-07-10 | Ethicon Llc | Polarity of hall magnet to identify cartridge type |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| MX2017003960A (es) | 2014-09-26 | 2017-12-04 | Ethicon Llc | Refuerzos de grapas quirúrgicas y materiales auxiliares. |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9943309B2 (en) | 2014-12-18 | 2018-04-17 | Ethicon Llc | Surgical instruments with articulatable end effectors and movable firing beam support arrangements |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| DE102015203487A1 (de) * | 2015-02-26 | 2016-09-01 | Ecoroll Ag Werkzeugtechnik | Festhammervorrichtung zum Beeinflussen von Werkstücken und zugehöriges Verfahren |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10548504B2 (en) | 2015-03-06 | 2020-02-04 | Ethicon Llc | Overlaid multi sensor radio frequency (RF) electrode system to measure tissue compression |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10213201B2 (en) | 2015-03-31 | 2019-02-26 | Ethicon Llc | Stapling end effector configured to compensate for an uneven gap between a first jaw and a second jaw |
| US10835249B2 (en) | 2015-08-17 | 2020-11-17 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US20170086829A1 (en) | 2015-09-30 | 2017-03-30 | Ethicon Endo-Surgery, Llc | Compressible adjunct with intermediate supporting structures |
| US10478188B2 (en) | 2015-09-30 | 2019-11-19 | Ethicon Llc | Implantable layer comprising a constricted configuration |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| GB201618450D0 (en) * | 2016-11-01 | 2016-12-14 | Genius Ip Ltd | Apparatus for causing oscillating motion of a saw blade, a saw bland, and a method of attaching the saw blade |
| US10433837B2 (en) | 2016-02-09 | 2019-10-08 | Ethicon Llc | Surgical instruments with multiple link articulation arrangements |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| BR112018016098B1 (pt) | 2016-02-09 | 2023-02-23 | Ethicon Llc | Instrumento cirúrgico |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10363037B2 (en) | 2016-04-18 | 2019-07-30 | Ethicon Llc | Surgical instrument system comprising a magnetic lockout |
| CN107584456B (zh) * | 2016-07-06 | 2023-10-10 | 苏州宝时得电动工具有限公司 | 一种摆动机构及多功能机 |
| DE102016217086A1 (de) | 2016-09-08 | 2018-03-08 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einer Schwingungserzeugungseinheit |
| CN106346363B (zh) * | 2016-11-18 | 2018-05-01 | 常州市武进大成工贸有限公司 | 雕磨机 |
| US10835247B2 (en) | 2016-12-21 | 2020-11-17 | Ethicon Llc | Lockout arrangements for surgical end effectors |
| US10624635B2 (en) | 2016-12-21 | 2020-04-21 | Ethicon Llc | Firing members with non-parallel jaw engagement features for surgical end effectors |
| US10499914B2 (en) | 2016-12-21 | 2019-12-10 | Ethicon Llc | Staple forming pocket arrangements |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168619A1 (en) * | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling systems |
| US10675026B2 (en) | 2016-12-21 | 2020-06-09 | Ethicon Llc | Methods of stapling tissue |
| MX2019007311A (es) | 2016-12-21 | 2019-11-18 | Ethicon Llc | Sistemas de engrapado quirurgico. |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10667810B2 (en) * | 2016-12-21 | 2020-06-02 | Ethicon Llc | Closure members with cam surface arrangements for surgical instruments with separate and distinct closure and firing systems |
| US10856868B2 (en) | 2016-12-21 | 2020-12-08 | Ethicon Llc | Firing member pin configurations |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| CN110114014B (zh) | 2016-12-21 | 2022-08-09 | 爱惜康有限责任公司 | 包括端部执行器闭锁件和击发组件闭锁件的外科器械系统 |
| US11191539B2 (en) | 2016-12-21 | 2021-12-07 | Cilag Gmbh International | Shaft assembly comprising a manually-operable retraction system for use with a motorized surgical instrument system |
| US10568625B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Staple cartridges and arrangements of staples and staple cavities therein |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10695055B2 (en) | 2016-12-21 | 2020-06-30 | Ethicon Llc | Firing assembly comprising a lockout |
| US10888322B2 (en) | 2016-12-21 | 2021-01-12 | Ethicon Llc | Surgical instrument comprising a cutting member |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| DE102017201466A1 (de) | 2017-01-31 | 2018-08-02 | Robert Bosch Gmbh | Elektrowerkzeug mit Drehoszillationsantrieb |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US10631859B2 (en) | 2017-06-27 | 2020-04-28 | Ethicon Llc | Articulation systems for surgical instruments |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11058424B2 (en) | 2017-06-28 | 2021-07-13 | Cilag Gmbh International | Surgical instrument comprising an offset articulation joint |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US10639037B2 (en) | 2017-06-28 | 2020-05-05 | Ethicon Llc | Surgical instrument with axially movable closure member |
| EP3420947B1 (de) | 2017-06-28 | 2022-05-25 | Cilag GmbH International | Chirurgisches instrument mit selektiv betätigbaren drehbaren kupplern |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US20190039200A1 (en) * | 2017-08-01 | 2019-02-07 | Jian-Shiou Liaw | Air File |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| JP6952241B2 (ja) * | 2017-08-29 | 2021-10-20 | パナソニックIpマネジメント株式会社 | 電動工具 |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US10743868B2 (en) | 2017-12-21 | 2020-08-18 | Ethicon Llc | Surgical instrument comprising a pivotable distal head |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| CN108890531A (zh) * | 2018-06-15 | 2018-11-27 | 何绮雯 | 一种振荡驱动装置 |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| NL2021527B1 (en) * | 2018-08-30 | 2020-04-24 | Holmatro B V | Tool having a pump and a motor on a common axis |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US12004740B2 (en) | 2019-06-28 | 2024-06-11 | Cilag Gmbh International | Surgical stapling system having an information decryption protocol |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11229437B2 (en) | 2019-06-28 | 2022-01-25 | Cilag Gmbh International | Method for authenticating the compatibility of a staple cartridge with a surgical instrument |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| CN112440222B (zh) * | 2019-09-02 | 2022-05-13 | 中国航发商用航空发动机有限责任公司 | 轴承外环装配工装 |
| CN214642818U (zh) * | 2019-10-18 | 2021-11-09 | 上海东河机电科技有限公司 | 一种用于磨抛机磨盘的传动机构及磨抛机 |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US12035913B2 (en) | 2019-12-19 | 2024-07-16 | Cilag Gmbh International | Staple cartridge comprising a deployable knife |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| US20220031350A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with double pivot articulation joint arrangements |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US12053175B2 (en) | 2020-10-29 | 2024-08-06 | Cilag Gmbh International | Surgical instrument comprising a stowed closure actuator stop |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US12108951B2 (en) | 2021-02-26 | 2024-10-08 | Cilag Gmbh International | Staple cartridge comprising a sensing array and a temperature control system |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US12102323B2 (en) | 2021-03-24 | 2024-10-01 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising a floatable component |
| US11826047B2 (en) | 2021-05-28 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising jaw mounts |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US12089841B2 (en) | 2021-10-28 | 2024-09-17 | Cilag CmbH International | Staple cartridge identification systems |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE8031084U1 (de) | 1981-07-23 | C. & E. Fein Gmbh & Co, 7000 Stuttgart | Elektrowerkzeug mit oszillierendem Werkzeugantrieb | |
| DE3840974A1 (de) | 1988-12-06 | 1990-06-07 | Fein C & E | Oszillationsantrieb |
| WO2005102605A1 (de) | 2004-04-23 | 2005-11-03 | C. & E. Fein Gmbh | Kraftgetriebenes handwerkzeug mit spanneinrichtung für ein werkzeug |
| WO2008128804A1 (de) | 2007-04-19 | 2008-10-30 | Robert Bosch Gmbh | Motorisch angetriebene werkzeugmaschine |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2743557A (en) * | 1951-01-10 | 1956-05-01 | Alice R Larson | Electrically driven abrading devices |
| US2854981A (en) * | 1957-02-18 | 1958-10-07 | Orthopedic Frame Company | Surgical instrument |
| US3147548A (en) * | 1962-05-17 | 1964-09-08 | Reginald J Aspeek | Power scraper tool |
| US3319874A (en) * | 1964-12-16 | 1967-05-16 | J A W Q Box | Variable displacement-variable clearance device |
| DE1750322B1 (de) * | 1968-04-20 | 1971-01-14 | Messerschmitt Boelkow Blohm | Vorrichtung zum Umformen einer linearen in eine kreisfoermige Bewegung,und umgekehrt |
| US3857177A (en) * | 1973-04-13 | 1974-12-31 | E Quintana | Dehiding apparatus |
| US3892988A (en) * | 1974-02-27 | 1975-07-01 | William M Gran | Hand-held multi-purpose electric meat tenderizer |
| DE3439475C2 (de) * | 1984-10-27 | 1996-02-01 | Bosch Gmbh Robert | Winkelvorsatz für schlagend und rotierend arbeitende Werkzeugmaschinen |
| JP2686188B2 (ja) * | 1991-06-28 | 1997-12-08 | ジューキ株式会社 | 糸調子器の調節つまみ定位置戻し装置 |
| US6250532B1 (en) * | 1991-10-18 | 2001-06-26 | United States Surgical Corporation | Surgical stapling apparatus |
| US5193281A (en) * | 1992-03-03 | 1993-03-16 | Kasten Vincent A | Apparatus for changing the cutting direction in a reciprocating saw |
| JPH0663284U (ja) | 1993-02-05 | 1994-09-06 | リョービ株式会社 | 動力工具の駆動部構造 |
| WO1994019134A1 (en) * | 1993-02-18 | 1994-09-01 | M-Pact Corporation | Cutting device and assembly |
| JP2639627B2 (ja) * | 1994-06-14 | 1997-08-13 | 株式会社ナカニシ | 切削及び研磨工具 |
| US5833524A (en) * | 1994-08-22 | 1998-11-10 | Ryobi Limited | Dust collection system for a power tool |
| ES2136278T3 (es) * | 1995-02-28 | 1999-11-16 | Synthes Ag | Mecanismo que transforma un movimiento de rotacion en un movimiento alternativo. |
| US5651396A (en) * | 1995-03-09 | 1997-07-29 | National Science Council | Variable pitch lead transmission mechanism for weft gripper strap drive |
| IT1287936B1 (it) * | 1996-07-03 | 1998-08-26 | Lavorwash Srl | Pompa a pistoni assiali |
| DE19738813B4 (de) * | 1997-09-05 | 2004-05-27 | Ina-Schaeffler Kg | Axialkolbenmaschine |
| DE19740436A1 (de) * | 1997-09-15 | 1999-03-18 | Schaeffler Waelzlager Ohg | Taumellager |
| DE10220325B4 (de) * | 2002-04-30 | 2011-06-01 | C. & E. Fein Gmbh | Oszillationsantrieb |
| DE10356068A1 (de) | 2003-12-01 | 2005-06-23 | Robert Bosch Gmbh | Handwerkzeugmaschine |
| US7386904B2 (en) * | 2003-12-15 | 2008-06-17 | Colgate-Palmolive Company | Drive system for electric toothbrushes and the like |
| CN201067900Y (zh) * | 2007-07-14 | 2008-06-04 | 胡继宁 | 往复摆动式机动工具 |
-
2009
- 2009-08-11 DE DE202009011312U patent/DE202009011312U1/de not_active Expired - Lifetime
-
2010
- 2010-07-28 EP EP10171089.5A patent/EP2283979B1/de active Active
- 2010-08-11 US US12/854,606 patent/US8397832B2/en active Active
- 2010-08-11 CN CN201010255983.5A patent/CN101992459B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE8031084U1 (de) | 1981-07-23 | C. & E. Fein Gmbh & Co, 7000 Stuttgart | Elektrowerkzeug mit oszillierendem Werkzeugantrieb | |
| DE3840974A1 (de) | 1988-12-06 | 1990-06-07 | Fein C & E | Oszillationsantrieb |
| WO2005102605A1 (de) | 2004-04-23 | 2005-11-03 | C. & E. Fein Gmbh | Kraftgetriebenes handwerkzeug mit spanneinrichtung für ein werkzeug |
| WO2008128804A1 (de) | 2007-04-19 | 2008-10-30 | Robert Bosch Gmbh | Motorisch angetriebene werkzeugmaschine |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202013011687U1 (de) | 2013-11-13 | 2015-02-23 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
| DE102013112455A1 (de) | 2013-11-13 | 2015-05-13 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
| DE102014102130A1 (de) | 2013-11-13 | 2015-05-13 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
| DE102014102131A1 (de) | 2013-11-13 | 2015-05-13 | C. & E. Fein Gmbh | Oszillierend antreibbare Werkzeugmaschine |
| WO2015071204A1 (de) | 2013-11-13 | 2015-05-21 | C. & E. Fein Gmbh | Oszillierend antreibbare werkzeugmaschine |
| EP3077135A1 (de) * | 2013-11-13 | 2016-10-12 | C. & E. Fein GmbH | Oszillierend antreibbare werkzeugmaschine |
| US10093011B2 (en) | 2013-11-13 | 2018-10-09 | C. & E. Fein Gmbh | Oscillatingly driven machine tool |
| EP3077135B1 (de) * | 2013-11-13 | 2023-01-11 | C. & E. Fein GmbH | Oszillierend antreibbare werkzeugmaschine |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110036609A1 (en) | 2011-02-17 |
| DE202009011312U1 (de) | 2010-12-23 |
| EP2283979A3 (de) | 2013-04-17 |
| US8397832B2 (en) | 2013-03-19 |
| CN101992459B (zh) | 2015-02-25 |
| EP2283979B1 (de) | 2015-07-08 |
| CN101992459A (zh) | 2011-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2283979B1 (de) | Handwerkzeug mit einem Oszillationsantrieb | |
| DE102007039580B4 (de) | Antriebsmechanismus für einen Motorfuchsschwanz | |
| EP2513510B1 (de) | Getriebe | |
| DE102008002212B4 (de) | Handgeführte Hubsägemaschine | |
| EP0750835A2 (de) | Heckenschere | |
| DE102004045117A1 (de) | Schaltvorrichtung | |
| DE102011084177A1 (de) | Greif- oder Spannvorrichtung | |
| EP2366493B1 (de) | Hand-Werkzeugmaschine mit einem Drehwinkel-Führungsmittel aufweisenden Exzentergetriebe | |
| WO2018068932A1 (de) | Lenksystem | |
| EP2366494B1 (de) | Hand-Werkzeugmaschine mit einem Zwangsrotation-Exzentergetriebe | |
| WO2018068933A1 (de) | Lenksystem | |
| EP2655018A1 (de) | Handwerkzeugmaschine | |
| DE202014006383U1 (de) | Stossaggregat | |
| DE102010015560A1 (de) | Handwerkzeug | |
| EP3068586B1 (de) | Oszillierend antreibbare werkzeugmaschine | |
| EP2366496A1 (de) | Hand-Werkzeugmaschine mit einem Handgriff | |
| DE102008029696A1 (de) | Getriebe | |
| DE3930334C1 (de) | ||
| EP1163976A1 (de) | Drehantrieb mit einer Drehzahlumschalteinrichtung für eine Werkzeughaltevorrichtung | |
| DE102010012021B3 (de) | Hand-Werkzeugmaschine mit einem Exzentergetriebe und einer Sperre | |
| WO2001094751A1 (de) | Axialkolbenmaschine | |
| EP4412795A1 (de) | Handwerkzeugmaschine mit einem mechanischen schlagwerk | |
| EP1493521B1 (de) | Werkzeugstösselvorrichtung, insbesondere für eine Wälz-Stoss-Maschine | |
| EP1493520A2 (de) | Wälz-Stoss-Maschine | |
| DD155886B1 (de) | Pressenantrieb |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: F16H 21/50 20060101ALI20130312BHEP Ipc: B24B 23/00 20060101ALI20130312BHEP Ipc: B27B 19/00 20060101ALI20130312BHEP Ipc: B25F 5/00 20060101AFI20130312BHEP |
|
| 17P | Request for examination filed |
Effective date: 20131015 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| 17Q | First examination report despatched |
Effective date: 20131106 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150120 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 735016 Country of ref document: AT Kind code of ref document: T Effective date: 20150715 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502010009810 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20150708 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151009 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151008 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151108 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151109 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502010009810 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| 26N | No opposition filed |
Effective date: 20160411 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20151008 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150728 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151008 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160729 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 735016 Country of ref document: AT Kind code of ref document: T Effective date: 20150728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150728 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150908 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150708 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230720 Year of fee payment: 14 |