EP1816265B1 - Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen - Google Patents
Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen Download PDFInfo
- Publication number
- EP1816265B1 EP1816265B1 EP06002096A EP06002096A EP1816265B1 EP 1816265 B1 EP1816265 B1 EP 1816265B1 EP 06002096 A EP06002096 A EP 06002096A EP 06002096 A EP06002096 A EP 06002096A EP 1816265 B1 EP1816265 B1 EP 1816265B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- sweeping
- machine according
- sweeping machine
- travel
- chassis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010408 sweeping Methods 0.000 title claims description 128
- 238000004140 cleaning Methods 0.000 title claims description 5
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 230000001154 acute effect Effects 0.000 claims description 3
- 230000000694 effects Effects 0.000 claims description 3
- 230000000452 restraining effect Effects 0.000 claims description 3
- 238000005096 rolling process Methods 0.000 claims description 3
- 238000002485 combustion reaction Methods 0.000 claims 1
- 241001417527 Pempheridae Species 0.000 description 55
- 238000010276 construction Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01H—STREET CLEANING; CLEANING OF PERMANENT WAYS; CLEANING BEACHES; DISPERSING OR PREVENTING FOG IN GENERAL CLEANING STREET OR RAILWAY FURNITURE OR TUNNEL WALLS
- E01H1/00—Removing undesirable matter from roads or like surfaces, with or without moistening of the surface
- E01H1/02—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt
- E01H1/05—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt with driven brushes
- E01H1/056—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt with driven brushes having horizontal axes
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01H—STREET CLEANING; CLEANING OF PERMANENT WAYS; CLEANING BEACHES; DISPERSING OR PREVENTING FOG IN GENERAL CLEANING STREET OR RAILWAY FURNITURE OR TUNNEL WALLS
- E01H1/00—Removing undesirable matter from roads or like surfaces, with or without moistening of the surface
- E01H1/02—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt
- E01H1/04—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt taking- up the sweepings, e.g. for collecting, for loading
- E01H1/045—Brushing apparatus, e.g. with auxiliary instruments for mechanically loosening dirt taking- up the sweepings, e.g. for collecting, for loading the loading means being a rotating brush with horizontal axis
Definitions
- the invention relates to a sweeper for cleaning roads, roads o. The like. Nutz vom, according to the preamble of claim 1.
- Known motor-driven sweepers ( US-A-1,876,866 ; US-A-2,834,034 ; US-A-3,087,180 ) have a frame construction with a drive motor, on the one hand a sweeping roller driving, on the other hand there is a gear coupling to respective support wheels of the sweeper.
- the sweeper also has a motorized sweeping roller, which is held in front of the support wheels between the legs of a U-shaped support beam on the chassis. However, the entire unit must be pushed by means of a manually operable handlebar by hand in the direction of travel.
- a also to be pushed by the user and intended in particular for sweeping snow sweeper shows DE 299 20 702 U1 in which the sweeping roller held on the chassis via support struts extends in front of front support wheels, so that a rear pivot point of the chassis for controlling the sweeper is thus largely relieved.
- the invention is concerned with the problem of creating a motor-driven sweeping machine for cleaning roads, roads o.
- the inventively constructed sweeper is provided with an optimized drive and sweeping system, in which by means of the sweeping roller driving drive member both a sweeping effect is achieved and largely without pushing effort for the user a displacement of the sweeper in a working direction predetermining the direction of travel.
- the user has to perform in this self-propelled sweeping machine only one more leadership and control movement to comply with the intended direction of travel.
- a particularly weight-optimized design of the machine concept provides that only the two parallel to the longitudinal center plane of the machine supporting wheels and at least one sweeping roller are effective as a support combination, wherein the sweeping roller connected to the chassis is held in the direction of travel behind the support wheels.
- the components are designed so that a largely balanced distribution of the bearing forces is achieved in respective sweeping positions in the area of the sweeping roller to be placed on a sweeping surface and the two support wheels.
- this handle designed as a handlebar lever can be releasably held in its installed position on the sweeper or the chassis, so that the handlebar is fixed in two, in particular spaced by 180 ° support positions.
- the machine can be controlled on the one hand as a collecting system having a sweeping system and on the other hand, the sweeper (especially after removal of the collection) also free travel, for example, to remove snow or leaves in the field of road surfaces, with little effort convertible.
- This lightweight and only a few items having assemblies of the support and drive system of the sweeper can be integrated in a further embodiment in the chassis, so that one of the user for Collective or Freibeen in the direction of travel to be pushed functional unit is formed.
- the sweeper When the drive motor and rotating sweeping roller is activated, the sweeper has a component of movement directed towards the operator, but due to the optimal weight distribution on the support wheels and the sweeping roller of the machine, it can also be operated manually by pushing with simple control.
- the sweeper can be moved with manual force against a small bottom side generated by the brush friction resistance in the intended direction of travel.
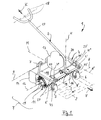
- Fig. 1 is a generally designated 1 sweeper, which is provided for cleaning roads, roads o. The like. Nutz vom 2.
- the sweeper 1 is provided with a respective wheels 5, 6 and 7 and connected to a handlebar 3 chassis 4.
- the two wheels 5 and 6 are provided as a mirror image of the longitudinal center plane M of the sweeper 1 arranged support wheels, so that a first transverse axis 8 is defined and provided as an impeller wheel 7 forms a second transverse axis 9 on the biaxial chassis 4.
- the chassis 4 is provided with a cover 10, under which a sweeping roller 11 is provided. This sweeping roller 11 is held substantially with a parallel to the transverse axes 8 and 9 longitudinal axis 12 and cooperates with a drive member 13 so that when not rotating sweeping roller 11 not shown debris from the sweeping surface 2 is receivable.
- the sweeping machine 1 has a construction in which the chassis 4 and the sweeping roller 11 which can be placed on the sweeping surface 2 are moved by their rotational movement (arrow A, FIG. Fig. 2 ) automatically displaceable function module F form, such that it is to be guided when sweeping only by means of the handlebar 3 by hand in a designated direction of travel (V, V, V '). It is understood that in this intended use of the functional assembly F, the decrease of the sweeping material from the effective area 2 takes place (arrow A, Fig. 2 ) and in particular a transfer into a collecting container 14 (FIG. Fig. 2 ) is provided.
- This interaction of the parts of the functional assembly F is tunable so that the automatic displacement in the direction of travel (V, V, V ”) and the sweeping up and forwarding take place synchronously in that a restraining force (arrow K, Fig. 1 ) is used on the handlebar 3.
- This retaining component is largely variable according to the respective friction conditions of the sweeping roller 11 on the surface 2.
- the sweeper 1 is (not shown) in the region of the drive member 13 or a gear connected to this so designed that with a reversible direction of rotation of the sweeping roller 11 and the corresponding direction of travel can be reversible (not shown).
- a both the front support wheels 5 and 6 and the rear wheel 7 detected steering unit 16 is provided.
- this embodiment is - related on the respective direction of travel V, V ', V "- the steering unit 16 with the wheels 5 and 6 arranged in front of the axis defining a roller 12.
- the guide rail 17 having a handlebar 3 in the middle longitudinal plane M is connected to the steering unit 16 in such a way that a vertical vertical axis H is defined in the connection region.
- an arcuate handle 18 is provided, with which in respective operating positions ( FIG. 3 to FIG.
- Fig. 3 shows the plan view of the sweeper 1 whose design in the region of the cover 10, the respective acute angles to the central longitudinal plane M extending edge contours 21 and 22 limit the effective range of the sweeping roller 11 and the brush parts 15 'widening space. This ensures that when using the sweeper 1, the respective outer brush parts 15 'for sweeping on a wall 23, 23' ( Fig. 4, Fig. 5 ) protrude so far that a wall-engaging sweeping process is feasible.
- Fig. 4 is indicated by the arrow B ', the sweeping or movement direction for the debris, wherein the retaining force K acts on the handle 18 substantially parallel to this direction.
- This restraining force is largely variable, according to the respective conditions of use directions or force vectors according to the arrows K ', K "are conceivable with the steering unit 16.
- a respective oblique position S, S' of the wheels 5, 6 and 7 can be predetermined with the steering unit 16, so that along the walls 23 and 23 'is defined a respective velocity vector representing travel direction V', V "and a wall area delimited by the walls can be cleaned by the brush parts 15 '.
- the lateral forces generated by the brush parts 15 ' are received by the wheels 5, 6 and 7 and the operator in the area of the handlebar 3.
- the link 3, which is set free for free travel can also be mounted in the vicinity of the running wheel 7 with the chassis 4 (eg in the region of the vertical axis H '). Fig. 10 ), so that the operating distance L changes to the dimension L 'and thus the user is closer to the machine 1.
- an additional steering linkage (not shown) may be provided in the region of the impeller 7 or in its place the chassis 4 have two parallel support wheels. It is also conceivable to provide for the handlebar 3 further connection points on the chassis 4 and the cover 10 in order to specify freely selectable operating positions for further applications.
- Fig. 1 to 18 is the respective sweeper 1 in the region of the transverse axis 8 forming support wheels 5, 6 'connected by means of a tie rod 20, 20' with the steering unit 16.
- the support wheels 5, 6 can be aligned in particular at an acute angle to the longitudinal center plane M (angle S, S '; Fig. 4, Fig. 5 ).
- this adjustability in the region of the tie rod 20 is a respective effective direction of the sweeping roller 11 to a changed direction of travel V, V 'adaptable, as shown for example when sweeping along the walls 23, 23'.
- the steering of the sweeper 1 is carried out with the steering unit 16, which in the embodiment according to Fig. 1 to 5 is connected by respective steering arms 27, 27 'with a parallel to the tie rod 20 support strut 4' of the chassis 4.
- These steering arms 27, 27 'on the one hand form two vertical joint axes E, E' as the steering axes of the system and on the other hand detect the tie rod 20 in respective joints 44, 44 '.
- the support wheels 5, 6 are held in a respective vertical axis H ", for which purpose, for example, support forks 43, 43 'are provided ( Fig. 6 ).
- a force and torque distribution when sweeping influencing displacement of the wheels 5, 6 can be done in the manner of a steering parallelogram.
- Fig. 5 and 5a are with an offset to the roller plane M 'G, G' of the axes E, E '(and correspondingly the hinge axes 44, 44') illustrates these support positions of the wheels 5, 6.
- Fig. 6 to 8 is at an angle W or W 'by a guide 24 continuously adjustable adjustment of the rolling direction of the wheels 5 and 6 similar Fig. 4 shown, wherein a steering rod connected to the tie rod 20 '27 cooperates with a retaining bolt 28.
- the handlebar 3 according to Fig. 6 a grip bow as a handle 18 ', so that an optimal gripping position is achieved in the illustrated skew.
- the handlebar 3 is provided in this embodiment of the frame assembly with a stationary on a support plate 26 of the chassis 4 held guide rail 17, so that the tie rod 20 'can be used for a parallel adjustment and then the tension by means of the clamping screw 25' takes place.
- the sweeper 1 is the steering axis (handlebar 20, 20 ') of the support wheels 5, 6 based on the axis of rotation 8 and relative to the point of contact of the support wheels 5, 6 with the ground in the direction of travel forward. If the guide rail 17 is pivoted ( Fig. 4, 5 ), in addition to the rotation / steering of the support wheels 5, 6 in addition a lateral offset G, G 'between sweeper 1 and training wheels 5, 6 arise. This means that the sweeper 1 is offset laterally relative to the operator, so that the advantages shown in wall-mounted sweeping are achieved.
- a first possibility of changing the ground clearance of the sweeping roller 11 to the useful surface 2 is shown, in which case the setting of the respective wheels 5, 6 via telescopic support members 29 takes place.
- the sweeping roller 11 is height adjustable in the region of this provided on the chassis 4 bracket, which is also conceivable to set an adjustable bracket on the cover 10.
- at least the support wheels 5 and 6 are adjustable in height, so that the brush height is to be regulated therewith (eg by means of the rotation direction arrows D, D ', D "in FIG Fig. 11 corresponding adjustment). It is also possible to adjust the height exclusively via the impeller 7 or to use all adjustment options on the wheels 5, 6 and 7, so that an advantageous parallel reduction is possible.
- the rollers of the wheels 5, 6, 7 may be supported via a strut.
- the distance of the brush to the floor or the brush pressure is thus basically specified.
- the operator has the option of influencing the brush contact pressure by raising / lowering the guide bar 17 (FIG. Fig. 2 To take arrow P).
- the three-wheeled sweeper 1 according to Fig. 12 lowers so that the guide rail 17 does not change its height as much as in the wheel adjustment according to Fig. 11 ,
- the chassis 4 "designed as a frame has an articulated axis 30 in the region of the brush axis 12.
- the support wheels 5, 6 located on the front frame part 31 and / or the impeller 7 located on the rear frame part 32 can be changed in their distance from each other the sweeping roller 11 is adjustable over the useful surface 2, wherein an angle 33 by adjustment in the region of a groove guide 38 (FIG. Fig. 12 ) is changed.
- an angle 33 by adjustment in the region of a groove guide 38
- FIG. Fig. 13 When tilting in the area of the angle 33 (FIG. Fig. 13 ) contribute both the support wheels and the impeller in equal parts to the change in height of the sweeping brush 11 at.
- the distances T, T 'of the bending axis 30 to the respective support wheels 5, 6 and the impeller 7 are the same.
- the collecting container 14 is fastened, wherein two screws 34 are shown ( Fig. 14 ).
- the collecting container 14 is not only moved upwards at a low bending axis 30 between the frame parts 31, 32, but also towards the sweeping brush 15 (arrow 35, FIG. FIGS. 14 and FIG. 15 ).
- a bottom-side end strip 36, 36 ' is placed optimally on the useful surface 2.
- the collecting container brought closer to the sweeping brush 15, especially when the brush 15 wears and the diameter 37 changes.
- the tilting of the collecting container is reinforced when the bending axis 30 of the frame parts 31, 32 is low.
- the sweeper 1 'according to Fig. 16 has no impeller but is designed by an optimal weight distribution of the assemblies of the functional unit F 'so that the two front support wheels 5' and 6 'and the sweeping brush 15 the dead weight (arrow P') by means of a chassis 4 '"wear hard sweeping brush 15.
- the collecting container 14 can be provided with its own rollers and guided vertically, so that the collecting container 14 maintains a constant distance from the bottom 2.
- the ground clearance can also be provided by a generous rubber lip or the like strip portions 36, 36 '( Fig. 14, Fig. 15 ) are defined on the collecting container 14. With increasing wear of the sweeping brush 15 so that the sump 14 is further lowered.
- Fig. 19 shows a further special case of a sweeper 1 "without steering device, in which the handlebar 3 is attached to the guide rail 17 directly to the cover 10 '.
- the two support wheels 5" and 6 "are guided laterally next to the sweeping brush part 15 and not steerable can be achieved via an eccentric adjustment 40 (or 40 ', Fig. 20 ) change.
- impeller 7 ' may also be omitted, the distance between the Stauerradachse 8 "to the axis 12 of the sweeping roller 11 is low and thus also the possibilities for influencing the brush pressure (P", Fig. 21 ) are reduced.
- FIGS. 20 and 21 show a three-wheeled version of the sweeper 1 "(similar Fig. 19 ), whose non-pivotable wheels 5 “and 6" are held by an eccentric 40 'in the vicinity of the sweeping roller 11.
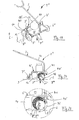
- this 3-wheel design also a rear wheel 7 "is provided and by a corresponding adjusting movement 41 in the region of the eccentric 40 ', the wheels 5" and 6 "in the intended support position are pivotable (arrow 42).
Description
- Die Erfindung betrifft eine Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen, gemäß dem Oberbegriff des Anspruchs 1.
- Bekannte motorgetriebene Kehrmaschinen (
US-A-1,876,866 ;US-A-2,834,034 ;US-A-3,087,180 ) weisen eine Gestellkonstruktion mit einem einerseits eine Kehrwalze antreibenden Antriebsmotor auf, von dem aus andererseits eine Getriebekopplung zu jeweiligen Stützrädern der Kehrmaschine besteht. GemäßEP 0 199 370 weist die Kehrmaschine ebenfalls eine motorgetriebene Kehrwalze auf, die vor den Stützrädern zwischen den Schenkeln eines U-förmigen Tragbalkens am Fahrgestell gehalten ist. Das gesamte Aggregat muß jedoch mittels eines manuell betätigbaren Lenkers von Hand in Fahrtrichtung geschoben werden. Eine ebenfalls vom Nutzer zu schiebende und insbesondere zum Kehren von Schnee vorgesehene Kehrmaschine zeigtDE 299 20 702 U1 , bei der die am Fahrgestell über Tragstreben gehaltene Kehrwalze vor vorderen Stützrädern verläuft, so daß damit ein hinterer Drehpunkt des Fahrgestells zur Steuerung der Kehrmaschine weitgehend entlastet wird. - Die Erfindung befaßt sich mit dem Problem, eine motorgetriebene Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen zu schaffen, deren bei geringem technischem Aufwand aus wenigen Einzelteilen kostengünstig herstellbare Baugruppen eine leichtbauende und wahlweise zum Sammel- sowie zum Freikehren einsetzbare Konstruktion bilden, wobei diese für wechselnde Einsatzzwecke mit einfachen Mitteln umrüstbar ist und auch für ungeübte Benutzer eine wesentlich erleichterte Handhabung ermöglicht.
- Die Erfindung löst diese Aufgabe durch eine Kehrmaschine mit den Merkmalen des Anspruchs 1. Hinsichtlich wesentlicher weiterer Ausgestaltungen wird auf die Ansprüche 2 bis 28 verwiesen.
- Die erfindungsgemäß aufgebaute Kehrmaschine ist mit einem optimierten Antriebs- und Kehrsystem versehen, bei dem mittels des die Kehrwalze antreibenden Antriebsorgans sowohl eine Kehrwirkung erzielt wird als auch weitgehend ohne Schubaufwand für den Nutzer eine Verlagerung der Kehrmaschine in eine die Arbeitsrichtung vorgebende Fahrtrichtung erfolgt. Der Nutzer hat bei dieser sich selbsttätig vorwärtsbewegenden Kehrmaschine nur noch eine Führungs- und Steuerbewegung zum Einhalten der vorgesehenen Fahrtrichtung auszuführen.
- Eine insbesondere gewichtsoptimale Ausführung des Maschinenkonzeptes sieht vor, daß lediglich die zwei zur Längsmittelebene der Maschine parallel angeordneten Stützräder und zumindest eine Kehrwalze als eine Stützkombination wirksam sind, wobei die mit dem Fahrgestell verbundene Kehrwalze in Fahrtrichtung hinter den Stützrädern gehalten ist. Dabei sind die Bauteile so konzipiert, daß in jeweiligen Kehrpositionen im Bereich der auf einer Kehrfläche aufzulegenden Kehrwalze bzw. der beiden Stützräder eine weitgehend gleichgewichtige Verteilung der Auflagekräfte erreicht wird. Bei einer Betätigung des Antriebsmotors ist diese sich selbsttätig bewegende und dabei Kehrgut erfassende Kehrmaschine vom Nutzer nur noch in Fahrtrichtung zu steuern.
- Das auf kostengünstige Baugruppen gerichtete Grundkonzept einer zweiachsigen Ausführung der Kehrmaschine ist darauf abgestellt, daß die von einem obenliegenden Motor angetriebene Kehrwalze mit ihrer Querachse in Längsrichtung der Kehrmaschine zwischen den eine jeweilige Querachse bildenden Stütz- und Führungsrädern gelegen ist und damit die gleichgewichtige Verteilung der Auflagekräfte erreicht wird. An dieser sich selbsttätig vorwärtsbewegenden Kehrmaschine ist eine Lenkbewegung durch einen einfachen Handhebel realisierbar, der mit den am Fahrgestell abgestützten vorderen Stützrädern zusammenwirkt.
- Dabei kann dieser als Lenkstange ausgebildete Handhebel in seiner Einbaulage an der Kehrmaschine bzw. dem Fahrgestell lösbar gehalten sein, so daß die Lenkstange auch in zwei insbesondere um 180° beabstandeten Stützstellungen festlegbar ist. Mit diesem vergleichsweise einfachen Aufbau kann die Maschine einerseits als ein einen Sammelbehälter aufweisendes Kehrsystem gesteuert werden und andererseits ist die Kehrmaschine (insbesondere nach Entfernen des Sammelbehälters) auch zum Freikehren, beispielsweise zur Beseitigung von Schnee oder Laub im Bereich von Straßenflächen, mit geringem Aufwand umrüstbar.
- Diese leichtbauenden und nur wenige Einzelteile aufweisenden Baugruppen des Stütz- und Antriebssystem der Kehrmaschine können in einer weiteren Ausführungsform so in das Fahrgestell integriert werden, daß damit eine vom Nutzer zum Sammel- oder Freikehren in Fahrtrichtung zu schiebende Funktionseinheit gebildet ist. Bei aktiviertem Antriebsmotor und drehender Kehrwalze weist die Kehrmaschine zwar eine zum Bediener gerichtete Bewegungskomponente auf, aber durch die optimale Gewichtsverteilung auf die Stützräder und die Kehrwalze der Maschine ist diese bei einfacher Steuerung auch durch Schieben von Hand bedienbar. Die Kehrmaschine kann mit Handkraft gegen einen geringen bodenseitig durch die Bürsten erzeugten Reibungswiderstand in die vorgesehene Fahrtrichtung verlagert werden.
- Weitere Einzelheiten und vorteilhafte Ausgestaltungen der Erfindung ergeben sich aus den Zeichnungen, in denen mehrere Ausführungsbeispiele erfindungsgemäßer Kehrmaschinen dargestellt sind. In der Zeichnung zeigen:
- Fig. 1
- eine Perspektivdarstellung einer erfindungsgemäßen Kehrmaschine in einer ersten Ausführung mit ein zweiachsiges Fahrgestell bildenden Lauf- und Stützrädern,
- Fig. 2
- eine Seitenansicht der Kehrmaschine gemäß
Fig. 1 , - Fig. 3
- eine Draufsicht der Kehrmaschine gemäß
Fig. 1 , - Fig. 4 und Fig. 5
- jeweilige Draufsichten ähnlich
Fig. 3 mit in unterschiedlichen Fahrtrichtungen verlagerbarer Kehrmaschine, - Fig. 5a
- eine vergrößerte Ausschnittsdarstellung der Kehrmaschine im Bereich der Verbindung von Lenkeinheit und Stützrad,
- Fig. 6
- eine Perspektivdarstellung der Kehrmaschine ähnlich
Fig. 1 mit einstellbarer Halterung der Stützräder im Bereich einer Lenkeinheit am Fahrgestell, - Fig. 7 und Fig. 8
- jeweilige Ausschnittsdarstellungen der Kehrmaschine gemäß
Fig. 6 im Bereich der in unterschiedliche Fahrtrichtungen eingestellten Stützräder, - Fig. 9 und Fig. 10
- jeweilige Perspektivdarstellungen der Kehrmaschine ähnlich
Fig. 1 mit bei deren Anwendung zum Freikehren umgestecktem Lenker, - Fig. 11
- eine Perspektivdarstellung ähnlich
Fig. 1 mit einer ersten Ausführung einer vertikalen Verstellmöglichkeit im Bereich der Stützräder, - Fig. 12
- eine perspektivische Rückansicht der Kehrmaschine ähnlich
Fig. 1 mit einer zweiten Ausführung der vertikalen Verstellmöglichkeit im Bereich des mit den Stützrädern verbundenen Fahrgestells, - Fig. 13
- eine Seitenansicht der Kehrmaschine gemäß
Fig. 12 mit jeweiligen Angaben zu den Verstellpositionen und -bereichen, - Fig. 14 und Fig. 15
- jeweilige vergrößerte Ausschnittsdarstellungen der Kehrmaschine gemäß
Fig. 12 im Bereich des Fahrgestells und des Sammelbehälters, - Fig. 16
- eine Perspektivdarstellung ähnlich
Fig. 1 mit einer zweiten Ausführung der selbsttätigen Kehrmaschine mit im Bereich der Stützräder einachsigem Fahrgestell, - Fig. 17 und Fig. 18
- jeweilige Seitenansichten der Kehrmaschine gemäß
Fig. 16 in Arbeitsstellungen der Kehrwalze mit unterschiedlichen Verschleißphasen, - Fig. 19
- eine dritte Ausführung der Kehrmaschine ähnlich
Fig. 1 mit einem im Bereich der Stützräder zweiachsigen Fahrgestell, - Fig. 20
- eine Seitenansicht der Kehrmaschine gemäß
Fig. 19 mit jeweiligen Verstellmöglichkeiten im Bereich der vorderen Stützräder, und - Fig. 21
- eine vergrößerte Ausschnittsdarstellung im Bereich der vorderen Stützräder der Kehrmaschine gemäß
Fig. 20 . - In
Fig. 1 ist eine insgesamt mit 1 bezeichnete Kehrmaschine dargestellt, die zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen 2 vorgesehen ist. Die Kehrmaschine 1 ist dabei mit einem jeweilige Räder 5, 6 und 7 aufweisenden und mit einem Lenker 3 verbundenen Fahrgestell 4 versehen. Die beiden Räder 5 und 6 sind dabei als spiegelbildlich zur Längsmittelebene M der Kehrmaschine 1 angeordnete Stützräder vorgesehen, so daß eine erste Querachse 8 definiert wird und das als Laufrad vorgesehene Rad 7 bildet eine zweite Querachse 9 am damit zweiachsigen Fahrgestell 4. Das Fahrgestell 4 ist dabei mit einer Abdeckung 10 versehen, unter der eine Kehrwalze 11 vorgesehen ist. Diese Kehrwalze 11 ist im wesentlichen mit einer zu den Querachsen 8 und 9 parallelen Längsachse 12 gehalten und wirkt mit einem Antriebsorgan 13 so zusammen, daß bei sich drehender Kehrwalze 11 nicht näher dargestelltes Kehrgut von der Kehrfläche 2 aufnehmbar ist. - Erfindungsgemäß weist die Kehrmaschine 1 eine Konstruktion auf, bei der das Fahrgestell 4 und die auf der Kehrfläche 2 auflegbare Kehrwalze 11 eine durch deren Drehbewegung (Pfeil A,
Fig. 2 ) selbsttätig verlagerbare Funktionsbaugruppe F bilden, derart, daß diese beim Kehren nur noch mittels des Lenkers 3 von Hand in eine vorgesehene Fahrtrichtung (V, V, V') zu führen ist. Es versteht sich, daß bei diesem bestimmungsgemäßen Gebrauch der Funktionsbaugruppe F die Abnahme des Kehrgutes von der Nutzfläche 2 erfolgt (Pfeil A,Fig. 2 ) und dabei insbesondere eine Weitergabe in einen Sammelbehälter 14 (Fig. 2 ) vorgesehen ist. - Dieses erfindungsgemäße Konzept der Kehrmaschine 1 (bzw. 1' in
Fig. 16 ;1 " inFig. 19 ) geht davon aus, daß die vom Antriebsorgan 13 nur der Kehrwalze 11 vermittelte Drehbewegung (Pfeil A) mittels jeweiliger bodenseitig auflegbarer Bürstenteile 15 sowohl in eine das Kehrgut erfassende Mitnahmebewegung (Bewegungskomponente gemäß Pfeil B,Fig. 2 ) als auch in eine durch eine bodenseitige Reibkraft der insbesondere elastischen Bürstenteile 15 beeinflußbare Rollbewegung (Bewegungspfeil C,Fig. 2 ) umsetzbar ist. Dieses Zusammenwirken der Teile der Funktionsbaugruppe F ist so abstimmbar, daß die selbsttätige Verlagerung in Fahrtrichtung (V, V, V") und die Kehrgutaufnahme und -weitergabe synchron erfolgen. Bei dieser selbsttätigen Verlagerung mittels der Funktionsbaugruppe F erfolgt eine Führung in die jeweilige Fahrtrichtung dadurch, daß gleichzeitig vom Bediener eine Rückhaltekraft (Pfeil K,Fig. 1 ) am Lenker 3 einsetzbar ist. Diese Rückhaltekomponente ist entsprechend den jeweiligen Reibungsbedingungen der Kehrwalze 11 auf der Fläche 2 weitgehend variabel. - Die Kehrmaschine 1 ist im Bereich des Antriebsorgans 13 bzw. eines mit diesem verbundenen Getriebes (nicht dargestellt) so ausgelegt, daß mit einer umschaltbaren Drehrichtung der Kehrwalze 11 auch die entsprechende Fahrtrichtung umkehrbar sein kann (nicht dargestellt).
- Bei der ersten Ausführung der Kehrmaschine 1 gemäß
Fig. 1 bis 5 ist im Bereich des Fahrgestells 4 eine sowohl die vorderen Stützräder 5 und 6 als auch das hintere Laufrad 7 erfassende Lenkeinheit 16 vorgesehen. In dieser Ausführung ist - bezogen auf die jeweilige Fahrtrichtung V, V', V" - die Lenkeinheit 16 mit den Rädern 5 und 6 vor der eine Achse 12 definierenden Querwalze 11 angeordnet. Einerseits ist der einen Führungsholm 17 aufweisende Lenker 3 im Bereich der Mittellängsebene M mit der Lenkeinheit 16 verbunden, so daß im Verbindungsbereich eine vertikale Hochachse H definiert wird. Andererseits ist am Führungsholm 17 ein bogenförmiger Handgriff 18 vorgesehen, mit dem in jeweiligen Bedienstellungen (Fig. 3 bis Fig. 5 ) optimale Griffstellungen für den Nutzer erreichbar sind, so daß dieser damit die sich selbsttätig vorwärtsbewegende Kehrmaschine 1 mit geringem Krafteinsatz führen und steuern kann. In der gemäßFig. 1 gezeigten Arbeitsstellung können die vorderen Stützräder 5, 6 und das Laufrad 7 von der Bedienperson mittels der Lenkeinheit 16 gedreht werden und die gesamte Funktionseinheit F wird zur Bedienperson so eingestellt, daß das Kehrgut entgegen der Fahrtrichtung V nach hinten verlagert wird. - In
Fig. 3 zeigt die Draufsicht der Kehrmaschine 1 deren Gestaltung im Bereich der Abdeckung 10, deren jeweilige spitzwinklig zur Mittellängsebene M verlaufende Randkonturen 21 und 22 einen den Wirkbereich der Kehrwalze 11 bzw. deren Bürstenteile 15' erweiternden Freiraum begrenzen. Damit wird erreicht, daß bei Anwendung der Kehrmaschine 1 die jeweils äußeren Bürstenteile 15' zum Kehren an einer Wandung 23, 23' (Fig. 4, Fig. 5 ) so weit frei hervorragen, daß ein wandschlüssiger Kehrvorgang durchführbar ist. InFig. 4 ist mit dem Pfeil B' die Kehr- bzw. Bewegungsrichtung für das Kehrgut angegeben, wobei im wesentlichen parallel zu dieser Richtung auch die Rückhaltekraft K am Handgriff 18 wirkt. Diese Rückhaltekraft ist weitgehend variabel ausgerichtet, wobei entsprechend der jeweils von den Einsatzbedingungen der Kehrmaschine 1 abhängigen Lenkstellung auch Richtungen bzw. Kraftvektoren gemäß den Pfeilen K', K" denkbar sind. Mit der Lenkeinheit 16 kann dabei eine jeweilige Schrägstellung S, S' der Räder 5, 6 und 7 vorgegeben werden, so daß entlang der Wandungen 23 und 23' eine jeweilige den Geschwindigkeitsvektor darstellende Fahrtrichtung V', V" definiert ist und ein von den Wandungen begrenzter Bodenbereich von den Bürstenteilen 15' gesäubert werden kann. In diesen Bedienstellungen werden die von den Bürstenteilen 15' erzeugten Seitenkräfte von den Rädern 5, 6 und 7 sowie der Bedienperson im Bereich des Lenkers 3 aufgenommen. - In Zusammenschau von
Fig. 1 mit den Darstellungen inFig. 9 und 10 wird deutlich, daß der Lenker 3 an der Lenkeinheit 16 im Bereich eines Verbindungsteils 19 festgelegt ist, derart, daß der Lenker 3 aus seiner die Kehrwalze 11 bzw. die Abdeckung 10 übergreifenden ersten Führungsstellung (Fig. 1 ) in eine um 180° geschwenkte zweite Führungsstellung (Fig. 9 ) verlagerbar ist. Denkbar wäre auch, den Lenker 3 bzw. dessen Führungsholm 17 im Bereich des Verbindungsteiles 19 in gestuften oder stufenlosen Zwischenstellungen mit der Lenkeinheit 16 zu verbinden (nicht dargestellt). - Mit dieser einfachen Umstellung im Bereich des Lenkers 3 bzw. des Führungsholms 17 wird erreicht, daß die Kehrmaschine 1 sowohl bei einem das Kehrgut auf der Kehrfläche 2 verlagernden Freikehren (
Fig. 10 ) als auch einem das Kehrgut in den Sammelbehälter 14 übergebenden Sammelkehren jeweils selbsttätig mittels der angetriebenen Kehrwalze 11 verlagerbar ist. Ebenso ist denkbar, daß am Fahrgestell 4 eine das Kehrgut beim Freikehren (Fig. 10 ) erfassende Fangschürze vorgesehen ist. - Der zum Freikehren festgelegte Lenker 3 kann in einer weiteren denkbaren Ausführung auch im Nahbereich des Laufrades 7 mit dem Fahrgestell 4 (z. B. im Bereich der Hochachse H',
Fig. 10 ) verbunden werden, so daß sich der Bedienabstand L auf das Maß L' ändert und damit der Nutzer näher zur Maschine 1 steht. Dabei kann auch ein zusätzliches Lenkgestänge (nicht dargestellt) im Bereich des Laufrades 7 vorgesehen sein oder an dessen Stelle das Fahrgestell 4 zwei parallele Stützräder aufweisen. Denkbar ist auch, für den Lenker 3 weitere Verbindungspunkte am Fahrgestell 4 bzw. der Abdeckung 10 vorzusehen, um für weitere Anwendungsfälle beliebig wählbare Bedienstellungen vorzugeben. - In den Ausführungen gemäß
Fig. 1 bis 18 ist die jeweilige Kehrmaschine 1 im Bereich der die Querachse 8 bildenden Stützräder 5, 6 mittels einer Spurstange 20, 20' mit der Lenkeinheit 16 verbunden. Damit können die Stützräder 5, 6 insbesondere spitzwinklig zur Längsmittelebene M ausgerichtet werden (Winkel S, S';Fig. 4, Fig. 5 ). Mit dieser Verstellbarkeit im Bereich der Spurstange 20 ist eine jeweilige Wirkrichtung der Kehrwalze 11 an eine geänderte Fahrtrichtung V, V' anpaßbar, wie dies beispielsweise beim Kehren entlang der Wandungen 23, 23' gezeigt ist. - Es versteht sich, daß bei dieser Verstellung im Bereich der Lenkeinheit 16 auch deren Arretierung in der vorgewählten Stellung möglich ist. Damit bleibt die Fahrtrichtung der Räder 5, 6, 7 bzw. der Kehrwalze 11 entlang der Wandung erhalten und am Lenker 3 ist eine einfache Führung ohne wesentliche Haltekraft gegen die von den Bürsten 15' erzeugte Abdruckkomponente möglich. In
Fig. 11 ist mit einem jeweiligen Drehrichtungspfeil D, D', D" diese Arretierung der Lenkeinheit 16 im Bereich der Räder 5, 6 und 7 veranschaulicht. Dabei ist denkbar, daß die inFig. 4 und 5 dargestellten und mittels einer Klemmschraube 25 fixierbaren Schrägstellungen gestuft oder stufenlos wählbar sind, wobei zur Fixierung der teleskopierbaren Bauteile 29 (Fig. 11 ) ein Spannkonus o. dgl. vorgesehen ist. - Die Lenkung der Kehrmaschine 1 erfolgt mit der Lenkeinheit 16, wobei diese in der Ausführung gemäß
Fig. 1 bis 5 durch jeweilige Lenkschenkel 27, 27' mit einer zur Spurstange 20 parallelen Tragstrebe 4' des Fahrgestells 4 verbunden ist. Diese Lenkschenkel 27, 27' bilden einerseits zwei vertikale Gelenkachsen E, E' als die Lenkachsen des Systems und erfassen andererseits die Spurstange 20 in jeweiligen Gelenken 44, 44'. Zwischen diesen Gelenk-Paaren E, 44 und E', 44' sind in einer jeweiligen Hochachse H" die Stützräder 5, 6 gehalten, wozu beispielsweise Traggabeln 43, 43' vorgesehen sind (Fig. 6 ). - Aus dieser Lenkabstützung ergibt sich, daß bei den in
Fig. 4 und 5 dargestellten Führungsstellungen eine die Kraft- und Momentenverteilung beim Kehren beeinflussende Verlagerung der Räder 5, 6 nach Art eines Lenkparallelogramms erfolgen kann. InFig. 5 und 5a sind mit einem zur Rollebene M' erfolgenden Versatz G, G' der Achsen E, E' (und entsprechend die Gelenkachsen 44, 44') diese Stützstellungen der Räder 5, 6 verdeutlicht. Dieser als eine Schrägstellung Q (Fig. 7 ) der Räder 5, 6 bzw. deren Querachse 8' wirksame radiale Versatz kann durch eine entsprechende Vorgabe eines Abstandes 45 der jeweiligen Hochachse H" zur Gelenkachse E, E' maschinenspezifisch bemessen werden. - Durch einen entsprechend großen Abstand 45 (
Fig. 5a ) ist für den Bediener eine Steuerung der Kehrmaschine 1 auf einer Führungsbahn möglich. Ebenso ist denkbar, auf die Hochachsen H" zu verzichten und die Räder 5, 6 im Bereich der Gelenkachsen E bzw. E' abzustützen. Das damit gebildete Lenkparallelogramm bewirkt eine entsprechende Verlagerung der Räder 5, 6 ähnlich dem Versatz G, G', wobei auch eine extreme Schrägstellung der Räder 5, 6 (ähnlich Q,Fig. 7 ) von nahezu 90° zur Mittelebene M' erreichbar ist. Die Kehrmaschine 1 kann in engen Bewegungsradien gesteuert werden. - In
Fig. 6 bis 8 ist mit einem Winkel W bzw. W' eine durch eine Führungsnut 24 stufenlos vorgegebene Verstellung der Rollrichtung der Räder 5 und 6 ähnlichFig. 4 gezeigt, wobei ein mit der Spurstange 20' verbundener Lenkschenkel 27 mit einem Haltebolzen 28 zusammenwirkt. Außerdem weist der Lenker 3 gemäßFig. 6 einen Griffbogen als Haltegriff 18' auf, so daß auch in der dargestellten Schrägstellung eine optimale Greifposition erreicht ist. Der Lenker 3 ist bei dieser Ausführung der Gestellbaugruppe mit einem ortsfest an einer Halteplatte 26 des Fahrgestells 4 gehaltenen Führungsholm 17 versehen, so daß die Spurstange 20' für eine parallele Verstellung nutzbar ist und danach die Verspannung mittels der Klemmschraube 25' erfolgt.Fig. 6 bis 8 verdeutlichen, daß jeweilige Lenkachsen der Stützräder 5, 6 bildenden Gelenkachsen H" durch einen Berührpunkt bzw. eine Berührlinie der Räder 5, 6 am Boden und durch deren Drehachse 8 verläuft. Damit wird bei einer Lenkbewegung die in ihrem Bogenmaß begrenzte Querstellung Q erzeugt. - Bei dieser ersten Variante der Kehrmaschine 1 liegt die Lenkachse (Lenker 20, 20') der Stützräder 5, 6 bezogen auf deren Drehachse 8 bzw. bezogen auf den Berührpunkt der Stützräder 5, 6 mit dem Boden in Fahrtrichtung vorn. Wird der Führungsholm 17 geschwenkt (
Fig. 4, 5 ), kann neben der Drehung/Lenkung der Stützräder 5, 6 zusätzlich ein seitlicher Versatz G, G' zwischen Kehrmaschine 1 und Stützrädern 5, 6 entstehen. Das bedeutet, die Kehrmaschine 1 versetzt sich seitlich bezogen auf die Bedienperson, so daß die beim wandschlüssigen Kehren ersichtlichen Vorteile erreicht sind. - Mit einem jeweiligen Bewegungspfeil N in
Fig. 11 ist eine erste Möglichkeit der Veränderung des Bodenabstands der Kehrwalze 11 zur Nutzfläche 2 gezeigt, wobei hier die Einstellung der jeweiligen Räder 5, 6 über teleskopartige Stützteile 29 erfolgt. Deutlich wird dabei, daß die Kehrwalze 11 im Bereich dieser am Fahrgestell 4 vorgesehenen Halterung höhenverstellbar ist, wobei ebenso denkbar ist, eine verstellbare Halterung an der Abdeckung 10 festzulegen. In jedem Fall der drei Räder aufweisenden Kehrmaschine 1 sind zumindest die Stützräder 5 und 6 in der Höhe verstellbar, so daß damit die Bürstenhöhe zu regulieren ist (z. B. mittels einer den Drehrichtungspfeilen D, D', D" inFig. 11 entsprechenden Verstellung). Ebenso ist es möglich, ausschließlich über das Laufrad 7 die Höhe einzustellen oder sämtliche Einstellmöglichkeiten an den Rädern 5, 6 und 7 zu nutzen, so daß eine vorteilhafte parallele Absenkung möglich ist. - Alternativ können die Laufrollen der Räder 5, 6, 7 auch über ein Federbein abgestützt sein. Der Abstand der Bürste zum Boden bzw. der Bürstendruck wird damit grundsätzlich vorgegeben. Zusätzlich erhält der Bediener die Möglichkeit, durch Anheben/Absenken des Führungsholms 17 Einfluß auf den Bürstenanpreßdruck (
Fig. 2 , Pfeil P) zu nehmen. - Die dreirädrige Kehrmaschine 1 gemäß
Fig. 12 senkt sich so ab, daß der Führungsholm 17 seine Höhe nicht so stark verändert wie bei der Radverstellung gemäßFig. 11 . Das als Rahmen ausgebildete Fahrgestell 4" weist im Bereich der Bürstenachse 12 eine Knickachse 30 auf. Damit können die am vorderen Rahmenteil 31 befindlichen Stützräder 5, 6 und/oder das am hinteren Rahmenteil 32 befindliche Laufrad 7 in ihrem Abstand zueinander verändert werden. Die Höhe der Kehrwalze 11 ist über der Nutzfläche 2 einstellbar, wobei ein Winkel 33 durch Verstellung im Bereich einer Nutführung 38 (Fig. 12 ) verändert wird. Bei einer Schwenkung im Bereich des Winkels 33 (Fig. 13 ) tragen sowohl die Stützräder als auch das Laufrad zu gleichen Teilen zur Höhenveränderung der Kehrbürste 11 bei. Dabei sind insbesondere die Abstände T, T' der Knickachse 30 zu den jeweiligen Stützrädern 5, 6 bzw. dem Laufrad 7 gleich. - An dem Rahmenteil 32 ist bei dieser Ausführung der Sammelbehälter 14 befestigt, wobei zwei Schrauben 34 dargestellt sind (
Fig. 14 ). Der Sammelbehälter 14 wird bei einer niedrig liegenden Knickachse 30 zwischen den Rahmenteilen 31, 32 nicht nur nach oben bewegt, sondern auch zur Kehrbürste 15 hin (Pfeil 35,Fig. 14 und Fig. 15 ). Durch diese Verlagerung wird ein bodenseitiger Abschlußstreifen 36, 36' optimal auf die Nutzfläche 2 aufgelegt. Damit wird der Sammelbehälter (Fig. 14 und Fig. 15 ) näher an die Kehrbürste 15 gebracht, insbesondere dann, wenn die Bürste 15 verschleißt und sich deren Durchmesser 37 ändert. Dabei ist die Kippung des Sammelbehälters verstärkt, wenn die Knickachse 30 der Rahmenteile 31, 32 niedrig liegt. - Die Kehrmaschine 1' gemäß
Fig. 16 besitzt kein Laufrad sondern ist durch eine optimale Gewichtsverteilung der Baugruppen der Funktionseinheit F' so ausgelegt, daß die beiden vorderen Stützräder 5' und 6' sowie die Kehrbürste 15 das Eigengewicht (Pfeil P') mittels eines Fahrgestells 4'" tragen. Dabei kann eine harte Kehrbürste 15 erforderlich sein. Der Sammelbehälter 14 kann dabei mit eigenen Rollen versehen und vertikal geführt werden, so daß der Sammelbehälter 14 einen konstanten Abstand zum Boden 2 behält. Alternativ kann der Bodenabstand auch über eine großzügige Gummilippe o. dgl. Streifenteile 36, 36' (Fig. 14, Fig. 15 ) am Sammelbehälter 14 definiert werden. Bei zunehmendem Verschleiß der Kehrbürste 15 wird damit auch der Sammelbehälter 14 weiter abgesenkt. Der Bediener hat durch Absenken/Anheben des Führungsholms 17 einen direkten Einfluß auf den Druck im Bereich der bodenseitig aufliegenden Kehrbürste 15. GemäßFig. 17 sind diese Verhältnisse bei zunehmendem Bürstenverschleiß dargestellt. Durch Abnutzung der Kehrbürste 15 wird deren Durchmesser 37 auf den Durchmesser 37' verringert und die Kehrmaschine kippt um die vordere Radachse 8' (Neigung 39), wobei der Streifenteil 36 mitverschleißt oder elastisch verformbar ist (Fig. 18 ). -
Fig. 19 zeigt einen weiteren Spezialfall einer Kehrmaschine 1" ohne Lenkeinrichtung, bei der der Lenker 3 mit dem Führungsholm 17 direkt an der Abdeckung 10' angesetzt ist. Die zwei Stützräder 5" und 6" sind seitlich neben dem Kehrbürstenteil 15 geführt und nicht lenkbar. Die Bürstenhöhe läßt sich dabei über eine ExzenterVerstellung 40 (bzw. 40',Fig. 20 ) verändern. Das inFig. 19 dargestellte Laufrad 7' kann ebenfalls entfallen, wobei der Abstand der Stützradachse 8" zur Achse 12 der Kehrwalze 11 gering ist und damit auch die Möglichkeiten zur Einflußnahme auf den Bürstendruck (P",Fig. 21 ) verringert sind. -
Fig. 20 und 21 zeigen eine dreirädrige Ausführung der Kehrmaschine 1" (ähnlichFig. 19 ), deren nicht schwenkbare Räder 5" und 6" über einen Exzenter 40' im Nahbereich der Kehrwalze 11 gehalten sind. Bei dieser 3-Rad-Ausführung ist ebenfalls ein hinteres Laufrad 7" vorgesehen und durch eine entsprechende Stellbewegung 41 im Bereich des Exzenters 40' sind die Räder 5" und 6" in die vorgesehene Auflagestellung schwenkbar (Pfeil 42).
Claims (28)
- Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen, mit einem zur Betätigung von Hand einen Lenker (3) aufweisenden Fahrgestell (4), an dem zur Längsmittelebene (M) der Kehrmaschine (1) eine jeweilige Querachse (8, 9) definierende Lauf- und/oder Stützräder (5, 6, 7) vorgesehen sind, wobei im Bereich unterhalb einer am Fahrgestell (4) gehaltenen Abdeckung (10) eine im wesentlichen parallel zu den Achsen (8, 9) der Räder verlaufende, ein Antriebsorgan (13) aufweisende und Kehrgut von einer Kehrfläche (2) aufnehmende Kehrwalze (11) drehbar ist, dadurch gekennzeichnet, daß das Fahrgestell (4) mit der auf der Kehrfläche (2) auflegbaren Kehrwalze (11) eine durch deren Drehbewegung (A) selbsttätig verlagerbare Funktionsbaugruppe (F) bildet, welche durch die Drehbewegung (A) der Kehrwalze (11) in eine die Arbeitsrichtung vorgebende Fahrtrichtung (V, V', V") selbsttätig verlagerbar ist und mittels des Lenkers (3) von Hand in diese vorgegebene Fahrtrichtung (V, V', V") führbar ist.
- Kehrmaschine nach Anspruch 1, dadurch gekennzeichnet, daß die vom Antriebsorgan (13) nur der Kehrwalze (11) vermittelte Drehbewegung (A) mittels bodenseitig auflegbarer Bürstenteüe (15) sowohl in eine das Kehrgut erfassende Mitnahmebewegung (B) als auch in eine durch bodenseitige Reibkraft beeinflußbare Rollbewegung der Lauf- bzw. Stützräder (5, 6, 7) umsetzbar ist, derart, daß die selbsttätige Verlagerung (V, V', V") in der vorgegebenen Fahrtrichtung und die Kehrgutaufnahme synchron ausführbar sind.
- Kehrmaschine nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß bei deren Führung in der jeweils vorgegebenen Fahrtrichtung (V, V', V") eine vom Bediener am Lenker (3) einsetzbare Rückhaltekraft (K) wirksam ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, daß mit einer umschaltbaren Drehrichtung der Kehrwalze (11) die vorgegebene Fahrtrichtung änderbar ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, daß im Bereich des Fahrgestells (4; 4") eine zumindest mit den Stützrädern (5, 6) verbundene und den Lenker (3) abstützende Lenkeinheit (16) vorgesehen ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, daß im Bereich des Fahrgestells (4'; 4") ein an der Abdeckung (10) festgelegter Lenker (3) mit der Lenkeinheit (16') zusammenwirkt.
- Kehrmaschine nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, daß diese eine in vorgegebener Fahrtrichtung (V, V', V") vor der Kehrwalze (11) angeordnete Lenkeinheit (16) aufweist und dabei die zwei Stützräder (5, 6) bei der selbsttätigen Verlagerung mittels des Lenkers (3) von Hand steuerbar sind.
- Kehrmaschine nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, daß der an der Lenkeinheit (16) bzw. der Abdeckung (10) abgestützte Lenker (3) in einer die Kehrwalze (11) bzw. die Abdeckung (10) übergreifenden ersten Führungsstellung festlegbar und aus dieser in eine um 180° verlagerte zweite Führungssteg lung umsteckbar ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, daß der Lenker (3) einerseits im Bereich zwischen den zwei Stützrädern (5, 6; 5', 6'; 5", 6") mit der Lenkeinheit (16) verbunden ist und andererseits zumindest einen in den unterschiedlichen Führungsstellungen erfaßbaren Handgriff (18) aufweist.
- Kehrmaschine nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, daß diese sowohl bei einem das Kehrgut auf der Kehrfläche (2) verlagernden Freikehren als auch einem das Kehrgut in einen Behälter (14) übergebenden Sammelkehren jeweils selbsttätig mittels der Kehrwalze (11) verlagerbar ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, daß am Fahrgestell (4, 4', 4", 4"') eine das Kehrgut beim Freikehren erfassende Fangschürze vorgesehen ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, daß die die Querachse (8) bildenden Stützräder (5, 6) im Bereich der Lenkeinheit (16) eine mit dem Lenker (3) verbundene Spurstange (20) aufweisen, damit die Stützräder (5, 6) spitzwinklig zur Längsmittelebene (M) ausrichtbar sind und damit in Fahrtrichtung der Maschine (1) jeweilige Wirkrichtungen der Kehrwalze (11) vorgebbar sind.
- Kehrmaschine nach Anspruch 12, dadurch gekennzeichnet, daß die Lenkeinheit (16) in der die Wirkrichtung der Kehrwalze (11) vorgebenden Stellung arretierbar ist.
- Kehrmaschine nach Anspruch 12 oder 13, dadurch gekennzeichnet, daß die Kehrwalze (11) in ihrer Wirkrichtung gestuft oder stufenlos verstellbar ist.
- Kehrmaschine nach einem der Ansprüche 12 bis 14, dadurch gekennzeichnet, daß die Lenkeinheit (16) im Bereich einer zur Spurstange (20) parallelen Tragstrebe (4') des Fahrgestells (4) einerseits zwei vertikale Gelenkachsen (E, E') bildet, in denen jeweils ein eine Traggabel (43, 43') der Stützräder (5, 6) erfassender Lenkschenkel (27, 27') abgestützt ist und diese andererseits mit der Spurstange (20) gelenkig verbunden sind.
- Kehrmaschine nach einem der Ansprüche 1 bis 15, dadurch gekennzeichnet, daß der steckbar und/oder schwenkbar im Bereich einer Hochachse (H) mit der Lenkeinheit (16) verbundene Lenker (3) als Führungsholm (17) ausgebildet und im Bereich des endseitigen Handgriffs (18) mit U-förmig verlaufenden Profilstangen versehen ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 16, dadurch gekennzeichnet, daß die Kehrwalze (11) in ihrem jeweilige Auflagestellungen der Bürstenteile (15) vorgebenden Bodenabstand veränderbar ist.
- Kehrmaschine nach Anspruch 17, dadurch gekennzeichnet, daß die Kehrwalze (11) im Bereich einer am Fahrgestell (4, 4', 4", 4"') und/oder an der Abdeckung (10) vorgesehenen Halterung höheneinstellbar ist.
- Kehrmaschine nach Anspruch 17 oder 18, dadurch gekennzeichnet, daß der Bodenabstand der Kehrwalze (11) durch die jeweils höheneinstellbar am Fahrgestell (4, 4', 4", 4"') gehaltenen Stützräder (5, 6; 5', 6'; 5", 6") veränderbar ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 19, dadurch gekennzeichnet, daß deren zum Sammelkehren vorgesehener Sammelbehälter (14) im Bereich des Fahrgestells (4, 4', 4", 4"') zwischen Kehrwalze (11) und Laufrad einem bzw. mehreren (7, 7') abgestützt ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 20, dadurch gekennzeichnet, daß diese nur zwei Stützräder (5, 6; 5', 6'; 5", 6"), zwei Stützräder (5, 6) und ein Laufrad (7, 7') oder zwei Stützräder (5, 6) und zwei Laufräder aufweist.
- Kehrmaschine nach einem der Ansprüche 1 bis 21, dadurch gekennzeichnet, daß die Kehrwalze (11) einteilig ausgebildet ist oder mehrere in deren Längsrichtung mittlere Teilungsbereiche bildende Bürstenteile aufweist.
- Kehrmaschine nach einem der Ansprüche 1 bis 22, dadurch gekennzeichnet, daß als Antriebsorgan (13) der Kehrwalze ein Verbrennungs- oder Elektromotor vorgesehen ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 23, dadurch gekennzeichnet, daß am Fahrgestell (4, 4', 4", 4"') ein mit bodenseitig auflegbaren Stützelementen (36, 36') versehener Sammelbehälter (14) festgelegt ist.
- Kehrmaschine nach Anspruch 24, dadurch gekennzeichnet, daß der Sammelbehälter (14) mit jeweiligen Stützrollen und/oder Gummilippen bodenseitig abstützbar ist.
- Kehrmaschine gemäß einem oder mehreren der Ansprüche 1 bis 25, dadurch gekennzeichnet, daß das Fahrgestell (4) und die angetriebene Kehrwalze (11) eine Funktionseinheit (F) bilden, die von Hand gegen den bodenseitigen Reibungswiderstand der drehenden Kehrwalze (11) in die vorgegebene Fahrtrichtung (V"') verschiebbar ist.
- Kehrmaschine nach Anspruch 26, dadurch gekennzeichnet, daß die die Stützräder (5, 6) aufweisende Lenkeinheit (16) in Fahrtrichtung (V''') wahlweise vor oder hinter der Kehrwalze (11) angeordnet ist.
- Kehrmaschine nach einem der Ansprüche 1 bis 27, dadurch gekennzeichnet, daß nur das mit dem Lenker (3) verbundene Fahrgestell (4"') mit zwei Stützrädern (5', 6') und eine parallel zu deren Querachse (8') abgestützte Kehrwalze (11) eine Funktionseinheit (F') bilden, die mittels der Drehung (A) der Kehrwalze (11) selbsttätig in die vorgegebene Fahrtrichtung (V, V', V") verlagerbar ist.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DK06002096.3T DK1816265T3 (da) | 2006-02-02 | 2006-02-02 | Fejemaskine til rengøring af veje, gader og lignende områder |
| ES06002096T ES2401095T3 (es) | 2006-02-02 | 2006-02-02 | Barredora para la limpieza de caminos, calles o superficies de uso similares |
| EP06002096A EP1816265B1 (de) | 2006-02-02 | 2006-02-02 | Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen |
| PL06002096T PL1816265T3 (pl) | 2006-02-02 | 2006-02-02 | Zamiatarka do czyszczenia dróg, ulic lub tym podobnych powierzchni użytkowych |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06002096A EP1816265B1 (de) | 2006-02-02 | 2006-02-02 | Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1816265A1 EP1816265A1 (de) | 2007-08-08 |
| EP1816265B1 true EP1816265B1 (de) | 2012-12-12 |
Family
ID=36579855
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06002096A Active EP1816265B1 (de) | 2006-02-02 | 2006-02-02 | Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP1816265B1 (de) |
| DK (1) | DK1816265T3 (de) |
| ES (1) | ES2401095T3 (de) |
| PL (1) | PL1816265T3 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104153314A (zh) * | 2014-08-26 | 2014-11-19 | 任庆举 | 一种电动道路清扫机 |
| CN110306474A (zh) * | 2019-06-17 | 2019-10-08 | 温德清 | 一种市政广场地砖清洁设备 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008024439A1 (de) * | 2008-05-14 | 2009-11-19 | Alfred Kärcher Gmbh & Co. Kg | Fahrbares Kehrgerät |
| DE102014013451A1 (de) * | 2014-09-17 | 2016-03-17 | Julius Tielbürger GmbH & Co. KG | Reinigungsgerät |
| CN109024411B (zh) * | 2018-10-11 | 2023-11-14 | 珠海亿华电动车辆有限公司 | 一种扫刷装置和扫地机 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0199370B1 (de) * | 1984-03-16 | 1989-07-12 | Stiga Aktiebolag | Kehrmaschine |
| DE19505156A1 (de) * | 1995-02-16 | 1996-08-22 | Matthies Hans Juergen | Handgeführtes Universalgerät für Garten- und Grundstückspflege |
| DE29920702U1 (de) * | 1999-11-25 | 2000-02-17 | Kersten Eckhard | Kehrmaschine |
-
2006
- 2006-02-02 DK DK06002096.3T patent/DK1816265T3/da active
- 2006-02-02 PL PL06002096T patent/PL1816265T3/pl unknown
- 2006-02-02 EP EP06002096A patent/EP1816265B1/de active Active
- 2006-02-02 ES ES06002096T patent/ES2401095T3/es active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104153314A (zh) * | 2014-08-26 | 2014-11-19 | 任庆举 | 一种电动道路清扫机 |
| CN110306474A (zh) * | 2019-06-17 | 2019-10-08 | 温德清 | 一种市政广场地砖清洁设备 |
| CN110306474B (zh) * | 2019-06-17 | 2020-12-18 | 安徽远维建设有限公司 | 一种市政广场地砖清洁设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| PL1816265T3 (pl) | 2013-05-31 |
| ES2401095T3 (es) | 2013-04-16 |
| DK1816265T3 (da) | 2013-03-11 |
| EP1816265A1 (de) | 2007-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0569430B1 (de) | Bodenbearbeitungsmaschine | |
| EP1964976B1 (de) | Überkopfwerfer-Kehrmaschine | |
| EP1816265B1 (de) | Kehrmaschine zum Reinigen von Wegen, Straßen o. dgl. Nutzflächen | |
| EP2721220A1 (de) | Kehrfahrzeug mit bürstenteller-verstelleinrichtung | |
| EP1531202B1 (de) | Kehrmaschine | |
| EP2275603A2 (de) | Fahrzeug, insbesondere zur Strandreinigung | |
| DE19745887C2 (de) | Kehrsystem | |
| DE2352638C3 (de) | Vorrichtung zum Reinigen von Gießscheiben für die Herstellung von Betonrohren | |
| DE202017005125U1 (de) | Kehrmaschinengehäuse | |
| DE10221351B4 (de) | Bodenreinigungsmaschine | |
| EP0980802A2 (de) | Behandlungsverfahren und Behandlungsanlage für Fahrzeuge, insbesondere Wasch- oder Polieranlage | |
| DE19637685C2 (de) | Reinigungsmaschine mit einschwenkbarer Seitenbürste | |
| EP3478144B1 (de) | Fahrbare bodenreinigungsmaschine | |
| DE4019550A1 (de) | Kehrmaschine | |
| DE102014101760A1 (de) | Anbau-Kehrmaschine für einen Schmalspur-Frontgeräteträger | |
| EP0391010A1 (de) | Kehrmaschine | |
| EP3825465B1 (de) | Selbstfahrende kehrmaschine zur reinigung befahr- und/oder begehbarer bodenoberflächen | |
| DE19728441C1 (de) | Reinigungsgerät | |
| DE4143123A1 (de) | Kehrmaschine | |
| DE3512730A1 (de) | Strassenkehrmaschine | |
| DE3831160A1 (de) | Sammelgut-behaelter mit flexibler rohrleitung | |
| DE19837038C1 (de) | Handverfahrbares Gerät mit absenkbarem Werkzeug | |
| EP1081288B1 (de) | Kehrmaschine | |
| EP0769589A1 (de) | Räum-Kehrvorrichtung für Lastkraftfahrzeuge | |
| EP1143843B1 (de) | Bodenbearbeitungsmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20070914 |
|
| 17Q | First examination report despatched |
Effective date: 20071023 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 588405 Country of ref document: AT Kind code of ref document: T Effective date: 20121215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: SCHNEIDER FELDMANN AG PATENT- UND MARKENANWAEL, CH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502006012295 Country of ref document: DE Effective date: 20130207 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: SCHNEIDER FELDMANN AG PATENT- UND MARKENANWAEL, CH |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2401095 Country of ref document: ES Kind code of ref document: T3 Effective date: 20130416 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130412 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130312 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121212 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130412 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130228 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: ALFRED KAERCHER GMBH & CO. KG Effective date: 20130912 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502006012295 Country of ref document: DE Effective date: 20130912 |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E017877 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130202 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130202 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20161221 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FI Payment date: 20170224 Year of fee payment: 12 Ref country code: SE Payment date: 20170222 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CZ Payment date: 20161230 Year of fee payment: 12 Ref country code: AT Payment date: 20170223 Year of fee payment: 12 Ref country code: BE Payment date: 20170224 Year of fee payment: 12 Ref country code: DK Payment date: 20170125 Year of fee payment: 12 Ref country code: HU Payment date: 20170112 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20170220 Year of fee payment: 12 Ref country code: TR Payment date: 20170103 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20170529 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 13 |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: ALFRED KAERCHER SE CO. KG Effective date: 20130912 |
|
| RAP4 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: JULIUS TIELBUERGER GMBH & CO. KG |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20180228 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 588405 Country of ref document: AT Kind code of ref document: T Effective date: 20180202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180203 Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180202 Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180203 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180202 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180202 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20190801 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180203 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 502006012295 Country of ref document: DE |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| 27O | Opposition rejected |
Effective date: 20200916 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20221214 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20230220 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230222 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230206 Year of fee payment: 18 Ref country code: DE Payment date: 20221026 Year of fee payment: 18 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230512 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240222 Year of fee payment: 19 |