EP1180850B1 - Motorregeleinheit für eine Spritzgussmaschine - Google Patents
Motorregeleinheit für eine Spritzgussmaschine Download PDFInfo
- Publication number
- EP1180850B1 EP1180850B1 EP01119357.0A EP01119357A EP1180850B1 EP 1180850 B1 EP1180850 B1 EP 1180850B1 EP 01119357 A EP01119357 A EP 01119357A EP 1180850 B1 EP1180850 B1 EP 1180850B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- phase
- motor
- control unit
- servo
- controllers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C45/00—Injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould; Apparatus therefor
- B29C45/17—Component parts, details or accessories; Auxiliary operations
- B29C45/76—Measuring, controlling or regulating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C45/00—Injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould; Apparatus therefor
- B29C45/17—Component parts, details or accessories; Auxiliary operations
- B29C2045/1784—Component parts, details or accessories not otherwise provided for; Auxiliary operations not otherwise provided for
- B29C2045/1792—Machine parts driven by an electric motor, e.g. electric servomotor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C2945/00—Indexing scheme relating to injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould
- B29C2945/76—Measuring, controlling or regulating
- B29C2945/76003—Measured parameter
- B29C2945/76033—Electric current or voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C2945/00—Indexing scheme relating to injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould
- B29C2945/76—Measuring, controlling or regulating
- B29C2945/76003—Measured parameter
- B29C2945/76083—Position
- B29C2945/76093—Angular position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C2945/00—Indexing scheme relating to injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould
- B29C2945/76—Measuring, controlling or regulating
- B29C2945/76177—Location of measurement
- B29C2945/7618—Injection unit
- B29C2945/76214—Injection unit drive means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C2945/00—Indexing scheme relating to injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould
- B29C2945/76—Measuring, controlling or regulating
- B29C2945/76177—Location of measurement
- B29C2945/76224—Closure or clamping unit
- B29C2945/7623—Closure or clamping unit clamping or closing drive means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C2945/00—Indexing scheme relating to injection moulding, i.e. forcing the required volume of moulding material through a nozzle into a closed mould
- B29C2945/76—Measuring, controlling or regulating
- B29C2945/76177—Location of measurement
- B29C2945/7624—Ejection unit
- B29C2945/76244—Ejection unit ejectors
- B29C2945/76247—Ejection unit ejectors drive means thereof
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H7/00—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions
- H02H7/08—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors
- H02H7/0833—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors for electric motors with control arrangements
- H02H7/0844—Fail safe control, e.g. by comparing control signal and controlled current, isolating motor on commutation error
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/07—Doubly fed machines receiving two supplies both on the stator only wherein the power supply is fed to different sets of stator windings or to rotor and stator windings
- H02P2207/076—Doubly fed machines receiving two supplies both on the stator only wherein the power supply is fed to different sets of stator windings or to rotor and stator windings wherein both supplies are made via converters: especially doubly-fed induction machines; e.g. for starting
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P70/00—Climate change mitigation technologies in the production process for final industrial or consumer products
- Y02P70/10—Greenhouse gas [GHG] capture, material saving, heat recovery or other energy efficient measures, e.g. motor control, characterised by manufacturing processes, e.g. for rolling metal or metal working
Definitions
- the present invention relates to a control unit of a motor for an injection molding machine, in particular, to a control unit for controlling a servo motor used for a motor-driven injection molding machine or a hybrid molding machine.
- Drive methods of an injection molding machine are broadly classified into hydraulic and motor drive methods. While previously the hydraulic method had been mainly used, the motor drive method has now become more common. This is attributable to features of the motor drive method including a high rigidity of the power transmission mechanism, good ability to control position and speed of the movable parts, and a high energy conversion efficiency. However, the hydraulic method has a feature permitting easy and accurate force control of the driving section, that is unavailable in the motor drive method. A hybrid method has therefore been developed which combines the motor and the hydraulic drive methods.
- Fig. 1 illustrates the configuration of a typical motor-driven injection molding machine.
- This motor-driven injection molding machine has an injection unit 10 and a mold clamping mechanism 20.
- the injection unit 10 comprises a hopper 11 for temporarily storing a raw resin material, a heating cylinder 12 for plasticizing and melting a resin fed from the hopper 11, and a screw 13 for metering the molten resin in the heating cylinder 12 and injecting the thus metered molten resin.
- the molten resin is injected into a cavity positioned between a fixed mold 21 and a movable mold 22.
- the mold clamping mechanism 20 comprises the fixed mold 21, the movable mold 22, a fixed platen 23 and a movable platen 24, to which the fixed mold 21 and the movable mold 22 are attached, respectively, a toggle link 25 for moving the movable platen 24, and a plurality of tie bars 26 for guiding the movable platen 24.
- the motor-driven injection molding machine further comprises a plurality of drive motors (servo motors).
- the plurality of drive motors includes an injection motor 14 to move the screw forward and backward; a metering motor 15 for rotating the screw 13; an injection unit moving motor 16 to move the entire injection unit 10 forward and backward; a mold opening/closing motor 27 for moving the movable platen 24; an ejecting motor 29 to move an eject pin 28 incorporated in the movable platen 24 forward and backward; and a mold thickness complying motor 30 to move the movable platen 24 and the toggle link 25 in accordance with the thickness of the fixed mold 21 and the movable mold 22.
- the plurality of drive motors 14 to 16, 27, 29 and 30 are individually drive-controlled.
- a servo controller 41 is connected via a three-phase inverter 40 to each of the drive motors 14 to 16, 27, 29 and 30.
- An encoder 42 for detecting rotation of the motors and two current sensors 43 for detecting the magnitude of drive current fed from the three-phase inverter 40 are attached to each of the drive motors 14 to 16, 27, 29 and 30. Detection signals from the encoder 42 and the current sensors 43 are fed back to the servo controller 41.
- the servo controller 41 issues, under control of an upper control unit not shown, a control signal to the three-phase inverter 40 on the basis of the detection signals fed back from the encoder 42 and the current sensors 43.
- the three-phase inverter 40 generates signals (drive current) for three phases including U-phase, V-phase and W-phase in response to the control signal from the servo controller 41, and feeds the same to the three-phase motors.
- the three-phase motors thus rotate by an instructed amount of rotation at a timing instructed by the upper control unit.
- the drive motors 14 to 16, 27, 29 and 30 are independently controlled by the corresponding servo controllers, and injection molding is thus carried out.
- a hydraulic injection molding machine is characterized in that it is possible to achieve a larger transmission energy per unit time with a relatively small-sized apparatus. This is why there is a tendency toward adopting the hydraulic method for a large-scale (large-output) injection molding machine. There is, however, a demand for adopting the motor drive method or the hybrid method also for a large-capacity injection molding machine.
- the maximum output torque of the motor required for the injection molding machine varies with the drive source. For example, there is a considerable difference between the maximum output torque that the mold opening/closing motor is required to have and the maximum output torque that the ejecting motor is required to have. Even within a molding cycle, the torque that a motor is required to have is not constant. A large torque is required in some cases, and only a small torque suffices in others.
- Publication 1 discloses a brushless DC motor comprising an inverter connected to two three-phase windings.
- Publication 2 discloses an invention that can drive a six-phase induction motor by the use of two inverters. However, because the two inverters are connected to the same controller, it is necessary to change the configuration (software) of the controller in accordance with the purpose of use in the above-mentioned Publications 1 and 2.
- the inventions disclosed in Publications 1 and 2 suggest nothing about the following object of the present invention of a common control unit, and disclose or suggest nothing about means for achieving such an object.
- a single drive motor is connected to a single inverter, and a single servo controller is connected to this inverter.
- the inverter fails and cannot be controlled by the servo controller, runaway of the drive motor may occur. If such a runaway occurs, for example, in the mold opening/closing motor 27, the movable mold 22 held by the movable platen 24 collides with the fixed mold 21 held by the fixed platen 23, thus leading to breakage of these molds.
- Document EP-A-0 942 522 describes an apparatus and method for controlling drive of three-phase multiplex winding motor.
- a plurality of inverters are installed, wherein each inverter operatively drives a corresponding one of multiplex windings of the motor.
- a plurality of inverter controllers are installed whose number corresponds to that of the inverters.
- Document JP 06 296389 A discloses an operating method for servo motors.
- the detection signal i.e. the feed back pulse signal detected in a main servo motor is supplied to a main servo amplifier and a slave servo amplifier.
- control unit of a motor for an injection molding machine having the features as set forth in claim 1.
- Preferred embodiments of the control unit are stated in the sub-claims.
- a control unit of a motor for an injection molding machine is for driving and controlling AC motors, each having a plurality of sets of three-phase windings, used for an injection molding machine.
- the control unit has a plurality of three-phase inverters connected to the plurality of sets of three-phase windings, respectively, and a plurality of servo controllers connected to the plurality of three-phase inverters, respectively.
- the control unit has a plurality of three-phase inverters connected to the plurality of sets of three-phase windings, respectively, and a plurality of servo controllers connected to the plurality of three-phase inverters, respectively.
- each of the plurality of three-phase inverters has a first self-diagnosing circuit.
- the first self-diagnosing circuit issues a first abnormality signal to the servo controller connected to the three-phase inverter having the first self-diagnosing circuit having detected the abnormality.
- the servo controller having received the first abnormality signal transfers the first abnormality signal to the other servo controllers.
- the control unit comprises a three-phase double-winding type motor 51 having two sets of three-phase windings; first and second three-phase inverters 52 and 53 feeding drive currents to the two sets of three-phase windings, respectively; and first and second servo controllers 54 and 55 connected to the first and second inverters 52 and 53, respectively.
- the control unit further comprises an encoder 56 attached to the three-phase double-winding type motor 51 and detects the rotation thereof; and first and second current sensors 57 and 58 detecting drive currents fed to the two sets of three-phase windings, respectively.
- the first current sensors 57 comprise two sensors for detecting U-phase drive current and V-phase drive current fed to one of the two sets of three-phase windings.
- the second current sensors 58 comprise two sensors for detecting U-phase drive current and V-phase drive current fed to the other of the two sets of three-phase windings.
- the three-phase double-winding type motor 51 has two sets of U-phase, V-phase and W-phase windings (U1, V1, W1 and U2, V2, and W2), each providing a phase angle shift of 120.
- U1, V1, W1 and U2, V2, and W2 U1, V1, W1 and U2, V2, and W2
- Fig. 4A When an ordinary three-phase winding is expressed as shown in Fig. 4A , these windings are as shown in Fig. 4B .
- the first and second three-phase inverters 52 and 53 have the same configuration, and as shown in Fig. 3 , are composed of a plurality of power transistors and a plurality of diodes. Each of these first and second three-phase inverters 52 and 53 has capacities to supply at least a half the drive current necessary for obtaining the maximum output required by the three-phase double-winding type motor 51.
- the first and second servo controllers 54 and 55 have the same configurations, i.e., are operable on the same software, and have control performance to cope with a motor having a maximum output of half the maximum output required by the motor 51.
- switching is possible between master and slave.
- the first servo controller 54 is set as the master
- the second servo controller 55 is connected to an upper control unit 100.
- the second servo controller 55 set as the slave, is connected to the first servo controller 54, set as the master.
- the encoder 56 detects rotation of the three-phase double-winding type motor 51, generates a prescribed number of pulses per turn, and outputs the same to the first and second servo controllers 54 and 55.
- the first and second servo controllers 54 and 55 can calculate the rotation speed of the three-phase double-winding type motor 51 from the number of pulses entered per unit time and the amount of rotation of the three-phase double-winding type motor 51 from the total number of pulses.
- the first and second current sensors 57 and 58 detect drive currents flowing through the windings U1 and V1, and drive currents flowing through the windings U2 and V2, respectively, and output the detection values to the first and second servo controllers 54 and 55.
- the first and second servo controllers 54 and 55 control the first and second three-phase inverters 52 and 53 on the basis of these detection values, and the rotation speed and the amount of rotation of the three-phase double-winding type motor 51.
- the first servo controller 54 receives an operating instruction signal S100 from the upper control unit 100.
- the operating instruction signal S100 instructs generation of a large torque
- the first servo controller 54 issues a necessary control instruction signal S54 to the second servo controller 55.
- the first servo controller 54 subsequently supplies a synchronization signal SS54 to the second servo controller 55.
- the first servo controller 54 issues a control signal to the first three-phase inverter 52 in compliance with the operating instruction signal S100 from the upper control unit 100.
- the second servo controller 55 issues a control signal to the second three-phase inverter 53, at a timing in synchronization with the synchronization signal SS54, in accordance with the control instruction signal S54 from the first servo controller 54.
- the first and second three-phase inverters 52 and 53 generate drive currents in response to the control signals from the first and second servo controllers 54 and 55, respectively, and supply the same to the three-phase double-winding type motor 51, whereby the three-phase double-winding type motor 51 rotates.
- the encoder 56 detects rotation of the three-phase double-winding type motor 51, and outputs detection pulses to the first and second servo controller 54 and 55.
- the first and second current sensors 57 and 58 detect drive currents flowing to the windings U1 and V1 and the windings U2 and V2, respectively, and output the detected values to the first and second servo controllers 54 and 55.
- the first servo controller 54 causes a change in the control signal to the first three-phase inverter 52 on the basis of the detected value from the first current sensor 57 and the detection pulses from the encoder 56.
- the second servo controller 55 causes a change in the control signal to the second three-phase inverter 53, on the basis of the detected value from the second current sensor 58 and the detection pulses from the encoder 56.
- a change occurs in drive current fed from the first and second three-phase inverters 52 and 53 to the three-phase double-winding type motor 51, thereby controlling the rotation torque and speed of the three-phase double-winding type motor 51.
- the first servo controller 54 When the operating instruction signal S100, received by the first servo controller 54 from the upper control unit 100, is an instruction to produce a small torque, the first servo controller 54 does not output a control instruction signal to the second servo controller 55.
- the first servo controller 54 solely controls rotation of the three-phase double-winding type motor 51. More specifically, the first servo controller 54 issues a control signal to the first three-phase inverter 52, in accordance with the operating instruction signal S100 from the upper control unit 100, and the first three-phase inverter 52 supplies drive current to the three-phase double-winding type motor 51 in accordance with this control signal.
- the first servo controller 54 causes a change in the control signal to the first three-phase inverter 52 on the basis of the detected value from the first current sensor 57 and the detection pulses from the encoder 56.
- the motor is controlled by the use of two inverters and two servo controllers when a large torque is required, and the motor can be controlled by the use of a single inverter and a single servo controller when a large torque is not necessary.
- motors of various capacities can be used ranging from a small maximum output torque to a large maximum output torque, i.e., irrespective of the extent of maximum output torque.
- the control unit of this embodiment is composed of a plurality of controllers and inverters having the same configurations, it is possible to easily change the configuration in accordance with the capacity of the motor to be controlled by changing the number thereof. In this case, different kinds of controllers or inverters are not required and it is possible to achieve cost reduction.
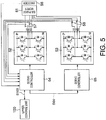
- a control unit according to a second embodiment of the present invention will now be described with reference to Fig. 5 . Only differences from the first embodiment will be described.
- the control unit shown in Fig. 5 has a six-phase motor 61 in place of the three-phase double-winding type motor.
- the winding of the six-phase motor 61 is as shown in Fig. 6 .
- the encoder 56 is connected only to a first servo controller 64, not to a second servo controller 65. Both the first and second current sensors 57 and 58 are connected to the first servo controller 64.
- the first and second servo controllers 64 and 65 have the same configurations, and can be switched between master and slave, as in the first embodiment.
- the first servo controller 64 is set as the master, and the second servo controller 65 is set as the slave.
- the first servo controller 64 is connected to the upper control unit 100.
- the first servo controller 64 generates, under control of the upper control unit 100, a control signal to be output to the first three-phase inverter 52, and a control instructing signal S64 to be output to the second servo controller 65, on the basis of the detection values from the first and second current sensors 57 and 58 and the detection pulses from the encoder 56.
- the second servo controller 65 controls the second three-phase inverter 53 only on basis of a control instructing signal S64 from the first servo controller 64.
- a six-phase motor may be used in the first embodiment, and a three-phase double-winding type motor may be used in the second embodiment.
- the number of sets of three-phase windings of the motor are not limited to two, and a motor having more sets of three-phase windings may be adopted.
- AC motors each having a plurality of sets of three-phase windings are controlled by the use of combinations of a plurality of three-phase inverters and a plurality of servo controllers.
- control unit of a motor for the injection molding machine will now be described with reference to Fig. 7 .
- the control unit comprises a three-phase double-winding type motor 51 having two sets of three-phase windings; first and second three-phase inverters 52' and 53' supplying drive currents to the two sets of three-phase windings, respectively; and first and second servo controllers 54' and 55' connected to the first and second inverters 52' and 53', respectively.
- the control unit further comprises the encoder 56 attached to the three-phase double-winding type motor 51 to detect rotation thereof; and the first and second current sensors 57 and 58 detecting drive currents fed to the two sets of three-phase windings, respectively.
- the first current sensors 57 comprises two sensors for detecting U-phase drive current and V-phase drive current fed to one of the two sets of three-phase windings.
- the second current sensors 58 comprises two sensors for detecting U-phase drive current and V-phase drive current fed to the other of the two sets of three-phase windings.
- the three-phase double-winding type motor 51 has two sets of U-phase, V-phase and W-phase windings (U1, V1 and w1, and U2, V2 and W2) each providing a phase angle shift of 120, and is formed by winding these windings one on top of the other.
- U1, V1 and w1, and U2, V2 and W2 each providing a phase angle shift of 120, and is formed by winding these windings one on top of the other.
- the first and second three-phase inverters 52' and 53' have the same configurations, and as shown in Fig. 7 , are composed of a plurality of power transistors and a plurality of diodes.
- the first and second three-phase inverters 52' and 53' have self-diagnosing circuits (first self-diagnosing sections) 52-1 and 53-1 for self-checking, respectively.
- These first and second three-phase inverters 52' and 53' have capacities to supply at least half the driving current necessary for obtaining a maximum output that the three-phase double-winding type motor 51 is required to have.
- the first and second servo controllers 54' and 55' have the same configurations, i.e., are operable on the same software, and have a control ability to cope with the three-phase double-winding type motor 51 having a maximum output corresponding to half the maximum output that the three-phase double-winding type motor 51 is required to have.
- the first and second servo controllers 54' and 55' have self-diagnosing circuits (second self-diagnosing sections) 54-1 and 55-1, respectively. These first and second servo controllers 54' and 55' permit switching between the master and the slave.
- the first servo controller 54' is set as the master, and the second servo controller 55', as the slave.
- the first servo controller 54', set as the master is connected to an upper control unit 100.
- the second servo controller 55', set as the slave is connected to the first servo controller 54', set as the master.
- the encoder 56 detects rotation of the three-phase double-winding type motor 51, generates a prescribed number of pulses for each turn, and outputs the same to the first and second servo controllers 54' and 55'.
- the first and second servo controllers 54' and 55' can calculate the rotation speed of the three-phase double-winding type motor 51 from the number of pulses entered per unit time, and the amount of rotation of the three-phase double-winding type motor 51 from the total number of pulses.
- the first and second current sensors 57 and 58 detect drive currents flowing through the windings U1 and V1 and drive currents flowing through the windings U2 and V2, respectively, and output the detection values to the first and second servo controllers 54' and 55'.
- the first and second servo controllers 54' and 55' control the first and second three-phase inverters 52' and 53' on the basis of these detection values and the rotation speed and the amount of rotation of the three-phase double-winding type motor 51.
- the first servo controller 54' receives an operating instruction signal S100 from the upper control unit 100.
- the first servo controller 54' outputs a necessary control instruction signal S54 to the second servo controller 55'. Subsequently, the first servo controller 54' issues a synchronization signal SS54 through the same route to the second servo controller 55'.
- the first servo controller 54' issues a control signal to the first three-phase inverter 52' in accordance with the operating instruction signal from the upper control unit 100.
- the second servo controller 55' issues a control signal to the second three-phase inverter 53' at a timing of synchronizing with the synchronization signal SS54, in accordance with the control instruction signal S54 from the first servo controller 54'.
- the first and second three-phase inverters 52' and 53' generate drive currents in response to the control signals from the first and second servo controllers 54' and 55', respectively, and supply the same to the three-phase double-winding type motor 51 whereby the three-phase double-winding type motor 51 rotates.
- the encoder 56 detects rotation of the three-phase double-winding type motor 51, and outputs the detection pulses to the first and second servo controllers 54' and 55'.
- the first and second current sensors 57 and 58 detect drive currents flowing through the windings U1 and V1 and drive currents flowing through the windings U2 and V2, and output the detected values to the first and second servo controllers 54' and 55'.
- the first servo controller 54' causes a change in the control signal to the first three-phase inverter 52' on the basis of the detection value from the first current sensor 57 and the detected pulses from the encoder 56.
- the second servo controller 55' causes a change in the control signal to the second three-phase inverter 53' on the basis of the detection value from the second current sensor 58 and the detected pulses from the encoder 56.
- control unit as described above, it is possible to generate a large torque in the three-phase double-winding type motor 51 without the need for a special inverter, a large-output motor or a special controller.
- the first servo controller 54' When the operating instruction signal S100 from the upper control unit 100 instructs the generation of a small torque, the first servo controller 54' does not output a control instruction signal S54 to the second servo controller 55'. In this case, the first servo controller 54' solely controls the three-phase double-winding type motor 51. More specifically, the first servo controller 54' issues a control signal to the first three-phase inverter 52' in accordance with the operating instruction signal S100 from the upper control unit. The first three-phase inverter 52' supplies driving current to the three-phase double-winding type motor 51 in accordance with this control signal. The first servo controller 54' causes a change in the control signal to the first three-phase inverter 52' on the basis of the detection value from the first current sensor 57 and the detected pulses from the encoder 56.
- the control unit conducts control, as described above, in accordance with the torque to be produced in the three-phase double-winding type motor 51.
- the control unit operates as follows.
- an abnormality signal AS52 (or AS53) is issued from the self-diagnosing circuit 52-1 (or 53-1), having detected the abnormality to the servo controller 54' (or 55').
- the servo controller 54' (or 55') outputs the received abnormality signal AS52 (or AS53) to the servo controller 55' (or 54').
- the servo controller 55' Upon receipt of the abnormality signal AS52 (or AS53) from the servo controller 54' (or 55'), the servo controller 55' (or 54') outputs a control signal to the three-phase inverter 53' (or 52') so as to stop rotation of the three-phase double-winding type motor 51.
- the three-phase inverter 53' (or 52') causes a change in drive current supplied so as to stop rotation of the three-phase double-winding type motor 51 on the basis of the control signal from the servo controller 55' (or 54').
- the self-diagnosing circuit 54-1 (or 55-1) of the servo controller 54' (or 55') detects abnormality
- the detected abnormality may cause the three-phase double-winding type motor 51 to continue rotating, then, an abnormality signal AS54 (or AS55) is issued to the servo controller 55' (or 54').
- AS54 an abnormality signal
- the servo controller 55' (or 54') issues, as described above, a control signal to stop the three-phase double-winding type motor 51 to the three-phase inverter 53' (or 52').
- the three-phase inverter 53' (or 52') stops rotation of the three-phase double-winding type motor 51 on the basis of the control signal from the servo controller 55' (or 54').
- the control unit of the present invention when abnormality occurs in the three-phase inverter or the servo controller, the occurrence of the abnormality is notified to the normally operating servo controller connected to the normally operating three-phase inverter, thus permitting prompt stoppage of the motor.
- a plurality of drive motors perform molding operations (metering process, injection process, dwelling process, and cooling process) concurrently. Therefore, when abnormality occurs in any of the drive motors and the control circuits thereof (inverter and servo controllers), it is necessary to stop operation of the other drive motors as well. Therefore, when receiving an abnormality signal AS52 from the first three-phase inverter 52', or when the self-diagnosing circuit 54-1 detects abnormality, or when an abnormality signal AS53 or AS55 is received from the second servo controller 55', the first servo controller 54' set as the master outputs (transfers) the abnormality signal to the upper control unit 100.
- the upper control unit 100 Upon receipt of the abnormality signal, the upper control unit 100 issues a control instruction signal to the servo controller (not shown) controlling the other drive motors, so as to immediately stop the molding operations or to stop the molding operations promptly after the completion of the process currently underway.
- the motor-driven injection molding machine can promptly discontinue molding operations.
- the control unit has the six-phase motor 61 as in the second embodiment in place of the three-phase double-winding type motor.
- the winding of the six-phase motor is as described above and as shown in Fig. 6 .
- the encoder 56 is connected only to the first servo controller 64', not to the second servo controller 65'. Furthermore, both the first and second current sensors 57 and 58 are connected only to the first servo controller 64'.
- the first and second servo controllers 64' and 65' have the same configuration as in the third embodiment, and can be switched between a master and a slave.
- the first servo controller 64' is set as the master
- the second servo controller 65' is set as the slave.
- the first servo controller 64' is connected to an upper control unit 100. Under control of the upper control unit 100, the first servo controller 64' generates a control signal to be output to the first three-phase inverter 52' and a control instruction signal to be output to the second servo controller 65', on the basis of the detection value from the first and second current sensors 57 and 58 and the detected pulses from the encoder 56.
- the second servo controller 65' controls the second three-phase inverter 53' on the basis of only a control instruction signal S64 from the first servo controller 64'.
- an abnormality signal AS52 is transmitted from the first servo controller 64' to the second servo controller 65'.
- an abnormality signal AS53 is transmitted to the first servo controller 64'.
- an abnormality signal AS65 is issued from a self-diagnosing circuit 65-1 to the first servo controller 64', thus permitting stoppage of rotation of the six-phase motor 61.
- an abnormality signal AS64 is issued from a self-diagnosing circuit 64-1. In this case, if information necessary for control in the second servo controller 65' has been supplied as a control instruction signal S64 from the first servo controller 64', rotation of the six-phase motor 61 can be discontinued in the same manner as above.
- the occurrence of the abnormality is outputted from the first servo controller 64, set as the master, to the upper control unit 100.
- the upper control unit 100 outputs a control signal to the servo controller (not shown) controlling the other normally operating drive motors, and immediately stops the molding operation, or promptly stops the molding operation upon completion of the process currently underway.
- a six-phase motor may be used in the third embodiment, and a three-phase double-winding type motor may be used in the fourth embodiment.
- a three-phase double-winding type motor may be used in the fourth embodiment.
- not only motors each having two sets of three-phase windings, but also motors having a plurality of sets of three-phase windings may be used.
- motors each having a plurality of sets of three-phase windings, are controlled by the use of a combination of a plurality of three-phase inverters and a plurality of servo controllers.
- rotation can be discontinued without causing runaway of the motor by issuing the abnormality signal to the normally operating servo controller.
- Each of the first and second three-phase inverters in the first and second embodiments may have a self-diagnosing circuit for self-checking as in the third embodiment.
- each of the first and second servo controllers in the first and second embodiments may have a self-diagnosing circuit as in the third embodiment.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Injection Moulding Of Plastics Or The Like (AREA)
Claims (6)
- Steuereinheit für einen Motor einer Spritzgießmaschine, die einen Wechselstrommotor (51, 61) mit einer Vielzahl von Sätzen von Dreiphasen-Wicklungen für die Spritzgießmaschine steuert, aufweisend:eine Vielzahl von Dreiphasen-Wechselrichtern (52, 53), die jeweils mit der Vielzahl von Sätzen von Dreiphasen-Wicklungen verbunden sind, undeine Vielzahl von Servosteuereinrichtungen (54, 55, 64, 65), die jeweils mit der Vielzahl von Dreiphasen-Wechselrichtern verbunden sind,dadurch gekennzeichnet, dass:die Vielzahl von Servosteuereinrichtungen (54, 55, 64, 65) miteinander verbunden sind, und dass eine aus der Vielzahl von Servosteuereinrichtungen (54, 64) als eine Master-Steuereinrichtung gesetzt ist und ein Steuersignal (S54, S56) zu anderen Servosteuereinrichtungen zuführt, die als eine oder mehrere Slave-Steuereinrichtungen (55, 65) gesetzt sind, sodass die von der Vielzahl von Dreiphasen-Wechselrichtern (52, 53) zu der Vielzahl von Sätzen von Dreiphasen-Wicklungen zugeführten Antriebsstromphasen zusammenfallen.
- Steuereinheit nach Anspruch 1, die weiterhin aufweist:einen Encoder (56) zum Erfassen einer Drehung des Wechselstrommotors, undeine Vielzahl von Sätzen von Stromsensoren (57, 58), die jeweils zu der Vielzahl von Sätzen von Dreiphasen-Wicklungen zugeführte Antriebsströme erfassen,wobei jede aus der Vielzahl von Servosteuereinrichtungen (54, 55, 64, 65) den entsprechenden der Dreiphasen-Wechselrichter (52, 53) basierend auf einer Ausgabe aus dem entsprechenden der Stromsensorsätze (57, 58) und einer Ausgabe aus dem Encoder (56) steuert.
- Steuereinheit nach Anspruch 1, die weiterhin umfasst:einen Encoder (56), der eine Drehung des Wechselstrommotors (51, 61) erfasst, undeine Vielzahl von Sätzen von Stromsensoren (57, 58), die jeweils zu der Vielzahl von Sätzen von Dreiphasen-Wicklungen zugeführte Antriebsströme erfassen,wobei eine aus der Vielzahl von Servosteuereinrichtungen (54, 64) als eine Master-Steuereinrichtung mit dem Encoder (56) und der Vielzahl von Stromsensoren (57, 58) verbunden ist,die anderen Servosteuereinrichtungen (55, 65) als Slave-Steuereinrichtungen mit der Master-Steuereinrichtung verbunden sind,die Master-Steuereinrichtung den entsprechenden der Dreiphasen-Wechselrichter (52) basierend auf einer Ausgabe aus dem Satz der Stromsensoren (57, 58) in Entsprechung zu der Master-Steuereinrichtung und einer Ausgabe aus dem Encoder (56) steuert und ein Slave-Steuersignal als das Steuersignal für das Steuern der entsprechenden der Dreiphasen-Wechselrichter (53) basierend auf einer Ausgabe aus den Sätzen der Stromsensoren (57, 58) in Entsprechung zu den jeweiligen Slave-Steuereinrichtungen und einer Ausgabe aus dem Encoder (56) erzeugt, unddie jeweiligen Slave-Steuereinrichtungen die Dreiphasen-Wechselrichter (53) in Entsprechung zu den Slave-Steuereinrichtungen basierend auf dem Slave-Steuersignal von der Master-Steuereinrichtung steuern.
- Steuereinheit nach Anspruch 1, wobei der Wechselstrommotor (51) vom Dreiphasen-Doppelwicklungstyp ist.
- Steuereinheit nach Anspruch 1, wobei der Wechselstrommotor (61) vom Sechsphasen-Wicklungstyp ist.
- Steuereinheit nach Anspruch 1, die weiterhin eine übergeordnete Steuereinrichtung (100) umfasst, die mit wenigstens einer aus der Vielzahl von Servosteuereinrichtungen (54, 55, 64, 65) verbunden ist,
wobei, wenn ein Betriebsbefehl von der übergeordneten Steuereinrichtung (100) ein Befehl zum Erzeugen eines großen Drehmoments ist, der Wechselstrommotor (51, 61) durch die Vielzahl von Dreiphasen-Wechselrichtern (52, 53) und die Vielzahl von Servosteuereinrichtungen (54, 55, 64, 65) gesteuert wird, und
wenn der Betriebsbefehl von der übergeordneten Steuereinrichtung (100) ein Befehl zum Erzeugen eines kleinen Drehmoments ist, der Wechselstrommotor (51, 61) durch irgendeinen aus der Vielzahl von Dreiphasen-Wechselrichtern (52, 53) und eine damit verbundene Servosteuereinrichtung (54, 55, 64, 65) gesteuert wird.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10011739A EP2290809A1 (de) | 2000-08-11 | 2001-08-10 | Motorregeleinheit für eine Spritzgussmaschine |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000244119A JP3605720B2 (ja) | 2000-08-11 | 2000-08-11 | 射出成形機用モータ制御装置 |
| JP2000244169A JP3661578B2 (ja) | 2000-08-11 | 2000-08-11 | 射出成形機用モータ制御装置 |
| JP2000244169 | 2000-08-11 | ||
| JP2000244119 | 2000-08-11 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10011739A Division-Into EP2290809A1 (de) | 2000-08-11 | 2001-08-10 | Motorregeleinheit für eine Spritzgussmaschine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1180850A2 EP1180850A2 (de) | 2002-02-20 |
| EP1180850A3 EP1180850A3 (de) | 2004-09-29 |
| EP1180850B1 true EP1180850B1 (de) | 2017-03-15 |
Family
ID=26597819
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10011739A Withdrawn EP2290809A1 (de) | 2000-08-11 | 2001-08-10 | Motorregeleinheit für eine Spritzgussmaschine |
| EP01119357.0A Expired - Lifetime EP1180850B1 (de) | 2000-08-11 | 2001-08-10 | Motorregeleinheit für eine Spritzgussmaschine |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10011739A Withdrawn EP2290809A1 (de) | 2000-08-11 | 2001-08-10 | Motorregeleinheit für eine Spritzgussmaschine |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6676400B2 (de) |
| EP (2) | EP2290809A1 (de) |
| KR (1) | KR100549349B1 (de) |
| CN (1) | CN1198382C (de) |
| SG (1) | SG108268A1 (de) |
| TW (1) | TWI220879B (de) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7008202B2 (en) * | 2001-03-08 | 2006-03-07 | The Japan Steel Works, Ltd. | Method and apparatus for forming thermoplastic resin foam |
| JP2006191709A (ja) | 2004-12-28 | 2006-07-20 | Denso Corp | 基準位置認識装置 |
| US7199535B2 (en) * | 2005-01-26 | 2007-04-03 | General Motors Corporation | Doubled-ended inverter drive system topology for a hybrid vehicle |
| US7990098B2 (en) * | 2007-07-30 | 2011-08-02 | GM Global Technology Operations LLC | Series-coupled two-motor drive using double-ended inverter system |
| US8122985B2 (en) * | 2007-07-30 | 2012-02-28 | GM Global Technology Operations LLC | Double-ended inverter drive system for a fuel cell vehicle and related operating method |
| US7956563B2 (en) * | 2007-07-30 | 2011-06-07 | GM Global Technology Operations LLC | System for using a multi-phase motor with a double-ended inverter system |
| US20090033253A1 (en) * | 2007-07-30 | 2009-02-05 | Gm Global Technology Operations, Inc. | Electric traction system for a vehicle having a dual winding ac traction motor |
| JP4760955B2 (ja) * | 2008-07-30 | 2011-08-31 | 株式会社デンソー | 負荷駆動装置及び負荷駆動装置の制御システム |
| JP2010199640A (ja) * | 2009-02-20 | 2010-09-09 | Toshiba Corp | 信号レベル変換回路 |
| JP4768056B2 (ja) * | 2009-07-24 | 2011-09-07 | ファナック株式会社 | 複数の固定子巻線を備えた電動機の駆動システム |
| GB2462940B8 (en) * | 2009-09-03 | 2012-03-28 | Protean Holdings Corp | Electric motor and electric generator. |
| KR101109018B1 (ko) * | 2009-11-18 | 2012-01-31 | 이영옥 | 사용성이 향상된 핸즈프리 장치 |
| JP5016707B2 (ja) * | 2010-07-27 | 2012-09-05 | 日精樹脂工業株式会社 | 射出成形機のベルト監視装置 |
| FR2977170B1 (fr) | 2011-06-29 | 2013-08-09 | Cie Engrenages Et Reducteurs Messian Durand | Dispositif d'entrainement pour broyeur, et broyeur correspondant |
| CN102403940A (zh) * | 2011-08-12 | 2012-04-04 | 东华大学 | 一种pet-ct扫描机架电机驱动方法 |
| JP5155432B1 (ja) * | 2011-10-18 | 2013-03-06 | ファナック株式会社 | 射出成形機の異常検出装置 |
| JP5155439B1 (ja) * | 2011-12-20 | 2013-03-06 | ファナック株式会社 | 射出成形機の異常検出装置 |
| JP5622053B2 (ja) | 2012-02-09 | 2014-11-12 | 株式会社デンソー | 多相回転機の制御装置、および、これを用いた電動パワーステアリング装置 |
| KR101378196B1 (ko) | 2012-06-12 | 2014-03-26 | 엘에스엠트론 주식회사 | 사출 성형기에 사용되는 유압 제어 시스템 및 그 방법 |
| CN102780427B (zh) * | 2012-08-20 | 2015-07-08 | 天津市松正电动汽车技术股份有限公司 | 一种六相电机驱动系统 |
| JP5614661B2 (ja) | 2012-10-09 | 2014-10-29 | 株式会社デンソー | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 |
| GB2494797B (en) | 2012-11-23 | 2014-01-15 | Protean Electric Ltd | A control system for an electric motor |
| JP5765589B2 (ja) * | 2013-03-11 | 2015-08-19 | 株式会社デンソー | 電力変換装置 |
| GB2512928B (en) * | 2013-04-12 | 2016-01-06 | Protean Electric Ltd | A control system for an electric motor |
| SI24416A (sl) | 2013-06-11 | 2014-12-31 | Gem Motors D.O.O. | Modularni multi-fazni električni stroj |
| TWI551874B (zh) * | 2015-03-13 | 2016-10-01 | 財團法人工業技術研究院 | 用於馬達變頻器之馬達效率分析方法 |
| JP6762829B2 (ja) * | 2016-09-30 | 2020-09-30 | 住友重機械工業株式会社 | 射出成形機 |
| JP7027808B2 (ja) * | 2016-11-11 | 2022-03-02 | 株式会社デンソー | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 |
| WO2018162405A1 (de) * | 2017-03-06 | 2018-09-13 | Thyssenkrupp Elevator Ag | Antriebsanordnung mit einem bewegbaren schienensegment |
| US11387764B2 (en) * | 2018-07-12 | 2022-07-12 | Zunum Aero, Inc. | Multi-inverter system for electric machine |
| JP7408628B2 (ja) * | 2018-08-07 | 2024-01-05 | タウ モーターズ,インコーポレイテッド | 電動機 |
| CN112910323A (zh) * | 2019-12-03 | 2021-06-04 | 中车时代电动汽车股份有限公司 | 双绕组永磁同步电机系统 |
| KR102364668B1 (ko) * | 2020-03-03 | 2022-02-17 | 엘에스일렉트릭(주) | 다중 인버터 조합 제어 장치 및 그 제어 방법 |
| WO2024040342A1 (en) * | 2022-08-22 | 2024-02-29 | National Thermovoltaics Inc. | Modular multiphase drive system |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4446416A (en) * | 1979-08-14 | 1984-05-01 | Wanlass Cravens Lamar | Polyphase electric machine having controlled magnetic flux density |
| US4441064A (en) * | 1981-12-18 | 1984-04-03 | General Electric Company | Twelve-pulse operation of a controlled current inverter motor drive |
| JPS6244063A (ja) | 1985-08-19 | 1987-02-26 | Fanuc Ltd | 電動機 |
| JPS62100191A (ja) | 1985-10-24 | 1987-05-09 | Mitsubishi Electric Corp | 多重巻線交流電動機の駆動システム |
| US4988273A (en) * | 1989-06-23 | 1991-01-29 | Cincinnati Milacron Inc. | Injection molding machines having a brushless DC drive system |
| JP2685586B2 (ja) * | 1989-06-30 | 1997-12-03 | 株式会社日立製作所 | 多重インバータ装置 |
| DE3933525C2 (de) * | 1989-10-05 | 1995-02-02 | Licentia Gmbh | Verfahren zur Ansteuerung eines stromrichtergespeisten Drehstrommotors, der zwei galvanisch getrennte, elektrisch um 30 DEG versetzte dreiphasige Ständerwicklungen aufweist |
| JP2754886B2 (ja) | 1990-08-24 | 1998-05-20 | トヨタ自動車株式会社 | 永久磁石型交流サーボモータ制御装置 |
| JP2738163B2 (ja) * | 1991-04-16 | 1998-04-08 | 株式会社安川電機 | サーボモータ運転方法 |
| KR0136694B1 (ko) * | 1994-03-18 | 1998-06-15 | 백중영 | 교류서보모터 구동제어장치 |
| JPH07298685A (ja) * | 1994-04-27 | 1995-11-10 | Meidensha Corp | 多重巻線電動機の駆動システム |
| US5705909A (en) * | 1995-12-14 | 1998-01-06 | General Motors Corporation | Control for AC motor having parallel sets of three-phase windings with only one current sensor per set |
| US5852558A (en) * | 1997-06-20 | 1998-12-22 | Wisconsin Alumni Research Foundation | Method and apparatus for reducing common mode voltage in multi-phase power converters |
| JP3899648B2 (ja) * | 1998-03-13 | 2007-03-28 | 株式会社明電舎 | 多重巻線電動機の制御方法 |
| US5929583A (en) * | 1998-03-13 | 1999-07-27 | Cincinnati Milacron Inc. | Method and apparatus for detecting aberrant motor operation in a plastics processing machine |
| JP2000004596A (ja) | 1998-06-11 | 2000-01-07 | Tamagawa Seiki Co Ltd | モータ制御方法 |
| JP4187308B2 (ja) * | 1998-06-16 | 2008-11-26 | 日本オーチス・エレベータ株式会社 | 可変速駆動装置 |
| JP4032516B2 (ja) | 1998-07-23 | 2008-01-16 | 株式会社デンソー | 自動車用電動駆動装置 |
-
2001
- 2001-07-19 TW TW090117651A patent/TWI220879B/zh not_active IP Right Cessation
- 2001-08-03 KR KR1020010046888A patent/KR100549349B1/ko active IP Right Grant
- 2001-08-10 SG SG200104856A patent/SG108268A1/en unknown
- 2001-08-10 CN CNB011240571A patent/CN1198382C/zh not_active Expired - Lifetime
- 2001-08-10 EP EP10011739A patent/EP2290809A1/de not_active Withdrawn
- 2001-08-10 US US09/925,741 patent/US6676400B2/en not_active Expired - Fee Related
- 2001-08-10 EP EP01119357.0A patent/EP1180850B1/de not_active Expired - Lifetime
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2290809A1 (de) | 2011-03-02 |
| SG108268A1 (en) | 2005-01-28 |
| TWI220879B (en) | 2004-09-11 |
| US20020018823A1 (en) | 2002-02-14 |
| EP1180850A2 (de) | 2002-02-20 |
| KR20020013399A (ko) | 2002-02-20 |
| US6676400B2 (en) | 2004-01-13 |
| CN1338817A (zh) | 2002-03-06 |
| CN1198382C (zh) | 2005-04-20 |
| EP1180850A3 (de) | 2004-09-29 |
| KR100549349B1 (ko) | 2006-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1180850B1 (de) | Motorregeleinheit für eine Spritzgussmaschine | |
| EP0247208B1 (de) | Antriebsvorrichtung für spritzgiessmaschine | |
| JP3661578B2 (ja) | 射出成形機用モータ制御装置 | |
| EP0715566B1 (de) | Formmaschine mit vektoriell gesteuerten wechselstromantrieben | |
| CA2035020C (en) | Injection molding machines having a brushless dc drive system | |
| JP2584287B2 (ja) | トグル式型締装置 | |
| EP0277249B1 (de) | Formschliessvorrichtung für eine spritzgiessmaschine | |
| JP5755522B2 (ja) | 電動射出成形機およびその電力貯蔵装置 | |
| EP0911959A1 (de) | Spritzgussmaschine | |
| EP2664439B1 (de) | Spritzgiessmaschine und stromregenerierungsvorrichtung | |
| US6142760A (en) | Drive control apparatus for electric injection molding machine | |
| JP3605720B2 (ja) | 射出成形機用モータ制御装置 | |
| JP5647068B2 (ja) | 射出成形機 | |
| JP2005096470A (ja) | 射出成形機用モータ制御装置 | |
| JPWO2004080690A1 (ja) | 成形機及びその制御方法 | |
| JP5801128B2 (ja) | 射出成形機 | |
| JP2004154961A (ja) | 回生機能を有する電動射出成形機の駆動制御装置 | |
| WO2019167494A1 (ja) | 電動射出成形機 | |
| JP4068493B2 (ja) | 射出成形機の監視装置及び監視方法 | |
| JP2003117979A (ja) | 電動射出成型機の異常処理方法 | |
| JP3582722B2 (ja) | 射出成形機の駆動制御装置および駆動制御方法 | |
| WO2010029900A1 (ja) | 成形機 | |
| JP2003231154A (ja) | 射出装置 | |
| JP2007083731A (ja) | 射出成形機の駆動制御方法および制御装置 | |
| JP4106005B2 (ja) | 成形機の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO SI |
|
| 17P | Request for examination filed |
Effective date: 20050317 |
|
| AKX | Designation fees paid |
Designated state(s): AT CH DE FR GB IT LI |
|
| 17Q | First examination report despatched |
Effective date: 20060825 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 60150357 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: H02P0007630000 Ipc: H02P0027060000 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H02P 27/06 20060101AFI20160727BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160928 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT CH DE FR GB IT LI |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 876489 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 60150357 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60150357 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20171218 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20170810 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170810 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 876489 Country of ref document: AT Kind code of ref document: T Effective date: 20170315 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20190730 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20190725 Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60150357 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 876489 Country of ref document: AT Kind code of ref document: T Effective date: 20200810 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200810 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210302 |