-
Die
vorliegende Erfindung betrifft im Allgemeinen eine Zugleitungskommunikation
und insbesondere die Wagenreihungsbestimmung in einem Zug.
-
Mit
der Einführung
elektropneumatisch betriebener Zugbremsen in Eisenbahnfrachtwagen
ergibt sich die Notwendigkeit, automatisch die Anordnung der einzelnen
Wagen und der Lokomotive im Zug bestimmen zu können. In einem EP-Bremssystem,
das einen Neuron-Chip oder andere "intelligente Schaltkreise" benutzt, steht eine
große
Menge an Informationen über
den Status jedes Wagens und der Lokomotive im Zug zur Verfügung. Wenn
jedoch der Ort des Wagens oder der Lokomotive im Zug nicht bekannt
ist, sind diese Informationen von geringem Wert. Es wurde vorgeschlagen,
dass sich jeder Wagen oder jede Lokomotive beim Starten anmelden
solle. Dies liefert zwar Informationen darüber, welche Wagen und Lokomotiven
sich im Zugverband befinden, doch nicht über deren genaue Position im
Verband. In manchen Zügen
werden auch Informationen über
die Richtung oder Orientierung der Wagen oder der Lokomotive im
Zug verlangt. Typische Beispiele sind Wagenkipper und fernlokalisierte
Lokomotiven.
-
Gegenwärtige Systeme
widmen sich diesem Problem, indem sie verlangen, dass die Reihung
der Wagen im Zug manuell in eine Datei in der Lokomotivensteuereinheit
eingetragen wird. Zwar liefert dies die Informationen, die erforderlich
sind, um jeden Wagen im Zug richtig zu lokalisieren; es handelt
sich jedoch um eine sehr zeitaufwendige Prozedur, wenn lange Züge betroffen
sind, und es muss bei jeder Änderung
der Zugzusammensetzung (z. B. wenn Wagen abgehängt oder angehängt werden)
eine manuelle Aktualisierung erfolgen. Die vorliegende Erfindung
beseitigt die Notwendigkeit für
das manuelle Eintragen dieser Daten, indem sie die für die Steuereinheit
erforderlichen Informationen liefert, um den Ort jedes Wagens und
EP-Steuermoduls oder
Knotens im Zug automatisch zu bestimmen.
-
In
der Vergangenheit gab es nur eine Kommunikationsverbindung zwischen
einer oder mehr der Lokomotiven in einem Zug, der mehr als eine
Lokomotive benötigte.
Aktuelle EP-Systeme benötigen
eine Kommunikationsverbindung zwischen allen Wagen und Lokomotiven
in einem Zug oder Zugverband. Die Association of American Railroads
hat als Kommunikationsarchitektur für EP-Systeme das von Echelon
konzipierte LonWorks gewählt.
Jeder Wagen enthält
im derzeitigen Design einen Neuronchip als Kommunikationsknoten. In
der Lokomotive und im letzten Wagen oder der Zugende-Vorrichtung
ist ein Funkbaken vorgesehen, um Steuerungen und Übertragungen
von beiden Zugenden zu gewährleisten.
-
Die
Reihungsbestimmung von Lokomotiven in einem Verband ist gut bekannt,
wie in US-Patent Nr. 4,702,291 an Eagle beschrieben. Beim Anschluss
der einzelnen Lokomotiven wird eine entsprechende Reihung registriert.
Wenn in einem Einheitszug Wagen angeschlossen werden, wie im Eagle-Patent
vorgesehen, ist die Beziehung der Wagen zueinander bei der Bildung
des Verbandes gut bekannt und ändert
sich nicht. Im Großteil
des Frachtverkehrs werden die Wagen im Verband kontinuierlich geändert, und
dies ist auch mit den Lokomotiven oder der Anzahl an Lokomotiven
der Fall. Deshalb muss die Reihungsbestimmung mehr als einmal durchgeführt werden.
-
Im
europäischen
Patent
EP 0 829 415
A umfasst eine Methode der Wagenreihungsbestimmung eines Zuges
a) die Einrichtung eines Schaltkreises mit einem Parameter entlang
eines Abschnitts des Zuges zwischen einem Knoten und einem Ende
des Zuges, b) Feststellung der Anwesenheit des Parameters an jedem Knoten,
c) Entfernen des Parameters, d) Wiederholung der Schritte a), b)
und c) für
jeden Knoten im Zug, und e) Feststellung der Wagenreihung als Funktion
der Beziehung zwischen der Anzahl der festgestellten Anwesenheiten
des Parameters für
jeden Knoten zueinander. Auch die Orientierung der Wagen wird mittels
zweier Knoten an jedem Wagen festgestellt.
-
Es
ist das Ziel der vorliegenden Erfindung, die bekannte Methode der
Reihungsbestimmung und der Feststellung der Orientierung der Wagen
eines Zuges zu erleichtern.
-
Dieses
Ziel wird mit einer Methode erreicht, welche die Merkmale von Anspruch
1 aufweist, oder mit einem System, das die Merkmale des Anspruches
5 umfasst.
-
Eine
automatische Methode der Wagenreihungsbestimmung und Feststellung
der Orientierung umfasst die Einrichtung eines Schaltkreises mit
einem Parameter entlang eines Abschnitts des Zuges zwischen einem
Einzelknoten auf einem der Wagen und einem Ende des Zuges. Die Anwesenheit
oder Abwesenheit des Parameters an jedem Knoten pro Wagen wird festgestellt,
und der Parameter wird entfernt. Die Sequenz wird für jeden
Wagen im Zug wiederholt. Abschließend werden die Reihung der
Wagen und die Orientierung mindestens eines Wagens als Funktion
der Anzahl der festgestellten Anwesenheiten oder Abwesenheiten des Parameters
für jeden
Knoten bestimmt.
-
Der
Schaltkreis kann durch je einzelne Bereitstellung einer elektrischen
Last über
eine Stromleitung, die durch den gesamten Zug führt, an den individuellen Knoten
eingerichtet werden. Das Messen einer elektrischen Eigenschaft,
d. h. der Stromstärke
oder der Spannung, an den einzelnen Knoten stellt die Anwesenheit
des Parameters fest. Jeder Knoten zählt die Anzahl der Abwesenheiten
oder Abwesenheiten des an seinem Knoten festgestellten Parameters
und überträgt den Zählwert mit
einem Knotenidentifikator an das Netzwerk für die Wagenreihungsbestimmung.
Die Leitung wird mit einer Spannung gespeist, die wesentlich niedriger
ist als die Spannung, mit der die Leitung während des normalen Zugbetriebs
gespeist wird.
-
Um
die Orientierung eines Wagens im Zug festzustellen, wird ein Schaltkreis
mit einem Parameter an einem einzelnen Knoten pro Wagen eingerichtet
und die Anwesenheit oder Abwesenheit des Parameters an diesem Knoten
festgestellt. Ist der Pa rameter anwesend, hat der Wagen eine bestimmte
Orientierung; ist der Parameter abwesend, hat der Wagen die entgegengesetzte
Orientierung.
-
Vor
der Einrichtung des Schaltkreises entlang eines Abschnitts des Zuges
wird eine Zählung
der Anzahl von Wagen im Zug und deren Identifizierung vorgenommen.
Nachdem die Sequenz der Feststellung der Anzahl von Anwesenheiten
oder Abwesenheiten des Parameters für jeden Wagen abgeschlossen
ist, wird der Zählwert
der Wagen im Zug mit der Anzahl von Wagen verglichen, die eine Zählung übermitteln.
Vorzugsweise umfasst das Feststellen der Anwesenheit oder Abwesenheit
des Parameters die Feststellung der Anwesenheit oder Abwesenheit
des Parameters an jedem Knoten, ausgenommen den Knoten, an dem der
Parameter eingerichtet ist.
-
Das
Prüfen
der Funktionstüchtigkeit
der Knoten umfasst die Einrichtung eines Schaltkreises mit einem Parameter
entlang eines Abschnitts des Zuges und die Feststellung der Anwesenheit
oder Abwesenheit des Parameters an den einzelnen Knoten. Der Schaltkreis
wird dann entfernt, und die Anwesenheit oder Abwesenheit des Parameters
an den einzelnen Knoten wird erneut festgestellt. Die Einsatzfähigkeit
des Knotens wird festgestellt als Funktion entweder der Anwesenheiten
oder Abwesenheiten des Parameters, der für jeden Knoten bestimmt wurde.
-
Andere
Ziele, Vorteile und Neuheiten der vorliegenden Erfindung gehen aus
der folgenden, detaillierten Beschreibung der Erfindung hervor,
wenn diese in Zusammenhang mit den begleitenden Zeichnungen gelesen
wird.
-
KURZE BESCHREIBUNG
DER ZEICHNUNGEN
-
1 ist ein Blockdiagramm
eines Zuges mit elektropneumatischen Bremsen und einem Kommunikationssystem,
das die Prinzipien der vorliegenden Erfindung berücksichtigt.
-
2 ist ein Blockdiagramm
der Elektronik in den einzelnen Wagen des Zuges unter Berücksichtigung der
Prinzipien der vorliegenden Erfindung.
-
3 ist ein Fließdiagramm
eines älteren
Verfahrens der Wagenreihungsbestimmung.
-
4 ist ein weiteres Blockdiagramm
der älteren
Technik eines anderen Ausführungsbeispiels
einer Elektronik in den einzelnen Wagen des Zuges.
-
5 ist ein Blockdiagramm
der älteren
Technik der Elektronik in den einzelnen Wagen des Zuges.
-
6 ist ein Fließdiagramm
einer Methode zur Wagenreihungsbestimmung in Kombination mit der Orientierung
gemäß den Prinzipien
der vorliegenden Erfindung.
-
7 ist ein Fließdiagramm
einer Methode der Orientierung gemäß den Prinzipien der vorliegenden Erfindung.
-
DETAILLIERTE
BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGSBEISPIELE
-
Ein
Zug, der aus einer oder mehreren Lokomotiven und einer Mehrzahl
von Wagen besteht, ist in 1 dargestellt.
Eine elektropneumatische Zugleitung 10 überträgt Strom und Kommunikation
an die einzelnen Knoten der Wagen. Eine Bremsleitung 12 versorgt
die einzelnen Wagen mit pneumatischem Druck, um die Ausgleichsbehälter darauf
zu laden, und kann den Druck so fluktuieren, dass die Bremsen pneumatisch angelegt
und gelöst
werden. Die Lokomotive umfasst eine Zugleitungssteuereinheit 20 (HEU),
welche den Strom und die Kommunikation und die Steuersignale über die
EP-Zugleitung 10 bereitstellt. Eine Bremsleitungssteuereinheit 22 regelt
den Druck in der Bremsleitung 12. Eine Stromversorgung 24 empfängt von
der Nieder spannungsversorgung der Lokomotive Strom und liefert den
benötigten
Strom für
die Zugleitungssteuereinheit 20 und die EP-Zugleitung 10.
-
Jeder
Wagen besitzt eine Wagenelektronik 30, die geeignet ist,
die elektropneumatischen Bremsen zu bedienen und die erforderliche
Kommunikation bereitzustellen. Die Zugleitungssteuereinheit 20 und
die Wagenelektronik 30 sind vorzugsweise LonWorks-Knoten
in einem Kommunikationsnetzwerk, obwohl auch andere Systeme und
Herangehensweisen benutzt werden können. Die Wagenelektronik 30 liefert
auch die erforderlichen Überwachungs-
und Kontrollfunktionen an den einzelnen Wagen. Bezüglich der
gegenständlichen Wagenreihungsbestimmungsmethode
ist ein Sensor 32 mit der Wagenelektronik 30 verbunden,
um die Stromstärke
oder Spannung der Zugleitung 10 an den Knoten oder Wagen
zu erfassen. Vorzugsweise handelt es sich bei dem Sensor 32 um
einen Stromstärkensensor,
und es könnte
ein Hallgeber sein oder auch jeder andere Magnetfeldsensor, der
ein Signal als Reaktion auf die Stromstärke in der Zugleitung 10 abgibt.
Alternativ dazu kann der Sensor 32 auch ein Spannungssensor
sein. Wie noch zu erörtern
ist, misst die Wagenelektronik 30 einen Parameter an ihrem
Knoten oder Wagen und überträgt die Ergebnisse über die
Zugleitung 10 zur Zugleitungssteuereinheit 20.
-
Die
Bremsleitung 12 ist ebenfalls mit der Wagenelektronik 30 der
einzelnen Wagen sowie mit der (nicht dargestellten) Luftbremsenanlage
verbunden. Die Wagenelektronik 30 überwacht die Bremsleitung 12 für Diagnostik
und Bremskontrolle und steuert die Bremsanlage des Wagens. Strom
und Kommunikation der Zugleitung werden entweder über gemeinsame
Stromleitungen oder über
Strom- und separate Kommunikationsleitungen übertragen. Die einzelnen Kommunikationsknoten
werden ebenfalls von einer gemeinsamen Stromleitung versorgt, auch
wenn sie lokal gelagerte Batteriequellen besitzen können.
-
Eine
Wagenendvorrichtung EOT wird dargestellt als verbunden mit der Wagenelektronik
des letzten oder des Wagens #n. Die EOT kann ein Einzelknoten im
Netzwerk sein, der seine eigene Wagenelektronik 30 besitzt.
In jedem Fall besitzt die EOT ei nen Lastwiderstand, der mit der
Zugleitung 10 verbunden werden kann, um alle Knotensensoren
zu testen, wie weiter unten beschrieben.
-
Ein
detaillierteres Diagramm der Wagenelektronik 30 ist in 2 dargestellt. Der lokale
Kommunikationsknoten besitzt eine Wagensteuerungsvorrichtung 31.
Die Wagensteuerungsvorrichtung 31 umfasst einen Neuronchip,
geeignete Spannungsregler, einen Speicher und ein Sende-Empfangsgerät zur Stromversorgung und
Kommunikation mit der Zugleitungssteuereinheit und anderen Wagen,
wie ein Knoten im Kommunikationsnetzwerk. LonWorks-Netzwerke sind
gut bekannt und müssen
deshalb hier nicht näher
beschrieben werden. Die Wagensteuerungsvorrichtung 31 ist
in der Lage, elektropneumatische Bremsen zu betreiben und die erforderliche
Kommunikation bereitzustellen. Die Wagensteuerungsvorrichtung 31 kann
auch die erforderlichen Überwachungsfunktionen
anderer Operationen an den einzelnen Wagen bereitstellen.
-
Das
Kabel 36 verbindet die Wagensteuerungsvorrichtung 31 mit
der Strom- und Kommunikationszugleitung 10, um die Wagensteuerungsvorrichtung
mit Strom zu versorgen und unter Verwendung des Sende-Empfangsgeräts der Wagensteuerungsvorrichtung
die erforderliche Kommunikation bereitzustellen. Vorzugsweise umfasst
die Wagenelektronik eine Batterie 33, die mit der Leitung 36' verbunden ist
und von der Zugleitung 10 über das Batterieladegerät 35 und
das Netzteil 37 geladen wird. Die Batterie 33 liefert
beispielsweise 12 Volt DC über
die Leitung 36' und
das Netzteil 37 24 Volt DC über die Leitung 36". Die Wagensteuerungsvorrichtung 31 steuert
den Betrieb des Netzteils 37 und liefert eine DC-Spannung
von annähernd
12 Volt auf der Leitung 34. Der Stromsensor 32,
bei dem es sich vorzugsweise um einen Stromsensor mit Digitalausgang
handelt, wird von der Leitung 34 versorgt und ist mit dem
Kabel 38 an die Zugleitung 10 angeschlossen. Der
Stromsensor 32 wird in Kombination mit dem Lastwiderstand 56,
der mittels Relais 54 selektiv mit der Strom- und Kommunikationszugleitung 10 verbunden
ist, für
die automatische Wagenreihungsbestimmung des Zuges verwendet.
-
Jeder
Wagen besitzt eine Speichervorrichtung, in der Identifizierungsdaten
gespeichert sind, die mindestens die Seriennummer, die Abbremsung,
das Leichtgewicht und das Bruttoschienengewicht des Wagens umfassen.
Die Speichervorrichtung ist permanent am Wagen befestigt und muss
nicht gewechselt werden. Für den
Fall, dass sich Daten ändern,
ist die Speichervorrichtung vorzugsweise programmierbar. Ansonsten
können
die Informationen in der Wagensteuerungsvorrichtung 31 gespeichert
werden, wenn diese ausreichend Speicherplatz hat.
-
Vorzugsweise
handelt es sich bei einer Speichervorrichtung um einen Kommunikationsknoten 40 des Kommunikationsnetzwerks.
Der subsidiäre
Knoten enthält
eine Neuronsteuereinheit 42, welche die Wagenidentifizierungsdaten
enthält
und mit der Wagensteuerungsvorrichtung 31 über das
Sende-Empfangsgerät 44 kommuniziert.
Ein DC-Wandler 46 liefert beispielsweise 5 Volt Strom von
der Leitung 34 an das Neuron 42 und das Sende-Empfangsgerät 44.
Das Neuron 42 empfängt
auch einen Ausgang vom Digital-Stromsensor 32 und speichert
die Stromdaten.
-
Das
Neuron 42 kann einen Optokoppler 50 und einen
DC-Wandler 52 steuern, der seinen Strom von der Leitung 34 erhält, um das
Festkörperrelais 54 zu
bedienen, so dass der Lastwiderstand 56 mit der Zugleitung 10 verbunden
wird. Dies wird in der Stromabnahmeroutine für den Stromsensor 32 verwendet.
Der Lastwiderstand ist ein Teil der Stromabnahme und Wagenreihungsbestimmung.
Alternativ dazu kann die Wagensteuerungsvorrichtung 31 den
Optokoppler 50 und das Festkörperrelais 54 steuern.
-
Die
Methode der Wagenreihungsbestimmung nach der älteren Technik unter Verwendung
beispielsweise der Apparate der 1 und 2 ist im Fließdiagramm
der 3 dargestellt. Um
eine Wagenreihungsbestimmung durchzuführen, muss die Kopfeinheit
HEU 20 die Zusammensetzung oder Konfiguration des Zuges kennen.
Nachdem der Zug zusammengestellt ist, also alle Wagen angeschlossen
und unter Strom sind, beliefert die HEU 20 alle Wagensteuerungsvorrichtungen 31 mit
Strom, wozu ein normal starker, beispielsweise 230-Volt-DC-Zugleitungsstrom
benutzt wird.
-
Die
HEU nimmt sodann einen Umruf vor oder fragt das Netzwerk ab, um
die Anzahl und Typen der Wagen im Zug festzustellen, und speichert
die Daten. Diese Informationen können
mit einer manuellen Wagenermittlung verglichen werden. Nach Bestätigung der
Wagenermittlung fährt
die HEU die Zugleitung herab und dann mit einer Niedrigspannung
wieder hoch, beispielsweise mit 24 Volt DC. Nachdem die Zugleitung
mit 24 Volt DC gespeist wird, verlangt die HEU, dass jede Wagensteuerungsvorrichtung
von ihren Batterien 33 12 Volt DC an den Stromsensor 32 und
die zugehörige
Wagenreihungselektronik anlegt.
-
Bevor
der Wagenreihungsbestimmungsprozess beginnt, werden die Stromsensoren
jeder Wagenelektronik 30 getestet. Die Kopfeinheit HEU
befiehlt der Zugendvorrichtung EOT, ihren Lastwiderstand 56 an
die Zugleitung 10 anzulegen. Vorzugsweise wird damit eine
Ein-Ampère-Last
an die Zugleitung angelegt. Die Kopfvorrichtung HEU befiehlt dann
allen Wagen, die Anwesenheit eines Stromes zu messen und aufzuzeichnen.
Alle operativen Sensoren sollten einen anwesenden Strom erfassen
und aufzeichnen. Als nächstes
befiehlt die Kopfeinheit HEU der Zugendvorrichtung EOT das Entfernen
des Lastwiderstands 56. Ohne Last befiehlt nun die Kopfeinheit
erneut allen Wagen, die Anwesenheit von Strom zu messen. Alle operativen
Sensoren sollten messen, dass kein Strom vorhanden ist.
-
Die
Ergebnisse dieser zwei Messungen werden dann zur Kopfeinheit übertragen.
Alle Wagen, die eine Zählung
Eins gemeldet haben, sind operative Stromsensoren. Wagen, die Null
oder Zwei melden, weisen auf fehlerhafte Stromsensoren hin. Wenn
jeder Zyklus des Zweizyklustests einzeln gemeldet wird, bestimmen
die Gesamtzahl sowie die Reihenfolge der Zählung operative/fehlerhafte
Sensoren. Die Kenntnis operativer und inoperativer Sensoren ist
wichtig für
den Wagenreihungsbestimmungsprozess.
-
Nachdem
die Verifizierung der Stromsensoren stattgefunden hat, beginnt die
Wagenreihungsbestimmung. Im Reihungsprozess wird jeder Wagen einzeln
und hintereinander aufgefordert, seinen Lastwiderstand zu aktivieren,
und die anderen Wagen auf gefordert, festzustellen ob Zugleitungsstrom
vorhanden ist. Die Wagen zwischen der Wagensteuerungsvorrichtung,
die ihre Last angelegt hat, und der Kopfeinheit, stellen Strom fest.
Die Wagen zwischen der Wagensteuerungsvorrichtung, welche die aktivierte
Last hat, und dem Zugende stellen keinen Strom fest. Alternativ
dazu kann die Stromversorgung an der Zugendvorrichtung EOT sein,
und Anwesenheit von Strom wird von der angelegten Last zum Ende
des Zuges festgestellt. Am Ende der Sequenz wird die Zählung in
den einzelnen Wagen an die Kopfeinheit gemeldet, welche dann die
Wagenreihungsbestimmung vornehmen kann.
-
Wie
in 3 dargestellt, befiehlt
die Kopfeinheit einem Wagen, seine Last 56 über dem
Zug anzulegen, und alle Wagensteuerungsvorrichtungen 31 messen
den Zugleitungsstrom. Wenn der Stromsensor 32 Strom feststellt,
erhöht
er an seiner Wagensteuerungsvorrichtung einen Zähler. Wird kein Strom festgestellt, wird
auch kein Zähler
erhöht.
Die ausgewählte
Wagensteuerungsvorrichtung trennt dann ihren Lastwiderstand 56 von
der Leitung. Die Kopfeinheit legt dann fest, ob dies der letzte
Wagen in der verifizierten Zusammenstellung ist. Ist dies nicht
der Fall, wird der Prozess wiederholt, bis alle Wagen abgefragt
wurden und ihre Last an die Zugleitung angeschlossen haben. Wenn
der letzte Wagen abgefertigt wurde, berichtet jede Wagensteuerungsvorrichtung
ihre Anwesenheitszählung
an die Kopfeinheit.
-
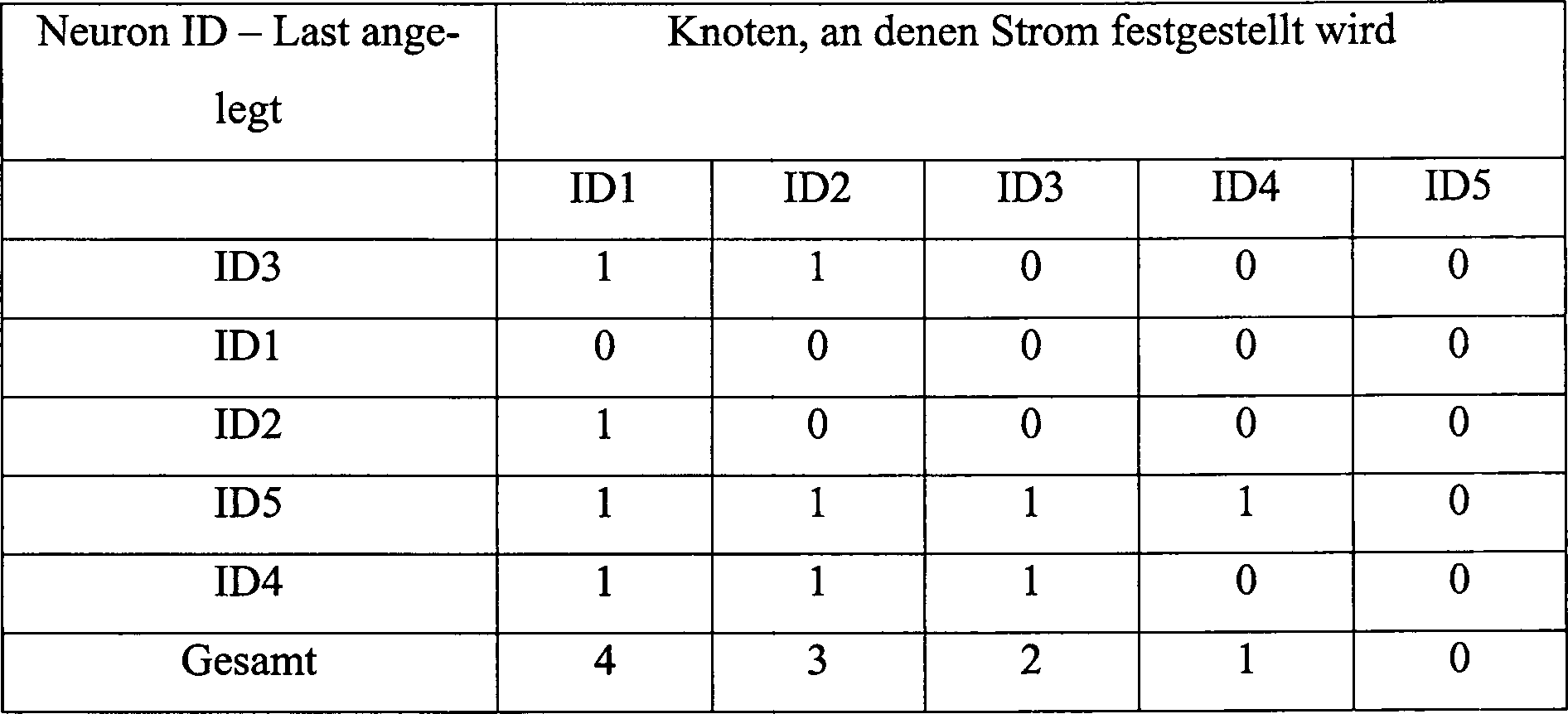
Die
Kopfeinheit sortiert sodann die Wagen auf Basis des Anwesenheitszählwerts.
Ein Beispiel der Zählwerte
für fünf Knoten,
die einzeln Last anlegen, ist in Tabelle 1 wie folgt illustriert: Tabelle
1 Figur
2 – Selbstanwesenheiten
nicht gezählt
-
Vorzugsweise
befiehlt die Kopfeinheit allen Wagen, ausgenommen dem Wagen mit
der Last an der Leitung, die Anwesenheit von Strom zu messen. Indem
er sich selbst nicht zählt,
werden die Orientierung des Wagens und folglich die Position des
Sensors mit Bezug auf die Last von der Zählung eliminiert. Folglich
hat der letzte Wagen einen Zählwert
Null, und der Wagen, der sich der Kopfeinheit zunächst befindet,
hätte den höchsten Zählwert.
Wenn die Abwesenheiten von Strom gezählt werden, anstelle der Anwesenheiten
von Strom, hätte
der letzte Wagen den höchsten
Zählwert
und der zunächstliegende
Wagen den niedrigsten Zählwert.
-
Eine
Gültigkeitsprüfung der
Wagenreihungsbestimmung kann durch Vergleichen der Anzahl gemeldeter
Wagen mit der Anzahl von Wagen, die operative Sensoren haben, durchgeführt werden.
Nur ein Wagen mit einem funktionierenden Stromsensor und einem Zählwert Null
kann der letzte Wagen sein, der Stromanwesenheiten zählt.
-
Nach
Abschluss der Wagenreihungsbestimmung schaltet die Kopfeinheit den
24-Volt-DC-Strom
von der Zugleitung aus. Sie befiehlt zudem allen Wagensteuerungsvorrichtungen 31,
die Wagenreihungsfunktion zu beenden, indem der Strom zu ihren Stromsensoren 32 ausgeschaltet
wird. Die Kopfeinheit legt sodann ihren normalen 230-Volt-DC-Betriebsstrom
an die Zugleitung an. Alternativ dazu kann die Wagenreihungsbestimmung
auch am 230 Volt DC an der Zugleitung mit entsprechendem Schutz
der elektronischen Bauteile ausgeführt werden.
-
Für bestimmte
Wagen ist es wichtig festzustellen, in welche Richtung der Wagen
gerichtet ist bzw. dessen Orientierung im Zug. Das können beispielsweise
Kippwagen oder fernlokalisierte Lokomotiven sein. Die Methode der älteren Technik
kann unter Heranziehung des Ausführungsbeispiels
der 4 und 5 die Orientierung des Wagens
und der Lokomotive feststellen. In 4 würde der
Wagen, dessen Orientierung benötigt wird,
einen primären
Kommunikationsknoten 40A und einen sekundären Kommunikationsknoten 40B besitzen,
die an die Wagensteuerungsvorrichtung 31 angeschlossen
sind. Es ist zu beachten, dass die Stromquellenanschlüsse in 4 und 5 aus Deutlichkeitsgründen weggelassen wurden. Der
Primärknoten 40A umfasst einen
Stromsensor 32, das Wagen-ID-Neuron 42, das Sende-Empfangsgerät 44,
den Optokoppler 50, das Festkörperrelais 54 und
den Lastwiderstand 56. Der Sekundärknoten würde nur das Wagen-ID-Neuron 42,
das Sende-Empfangsgerät 44 und
den Stromsensor 32 umfassen.
-
Durch
die Lokalisierung des Lastwiderstands 56 am primären Kommunikationsknoten
kann die Orientierung der Wagen bestimmt werden. Zwar würde in der
Lastanlegungs-Sequenz für
den Wagen nur der Primärknoten
verwendet, doch würden
sowohl die Stromsensoren wie das Wagen-ID-Neuron die Anwesenheit der
Variable zählen
und an die Wagensteuerungsvonichtung 31 weiterleiten. Die
Zählwerte
der Primär- und Sekundärknoten
würden
zur Bestimmung der Orientierung des Wagens sowie der Position des
Wagens im Zug übertragen.
Die Wagen-ID-Neuronen 40 der primären und sekundären Schaltkreise
würden
dieselbe Wagen-ID umfassen, mit einem zusätzlichen Bit oder Buchstaben,
der ein bestimmtes Ende des Wagens anzeigt oder ob es sich um einen
primären
oder sekundären
Schaltkreis handelt.
-
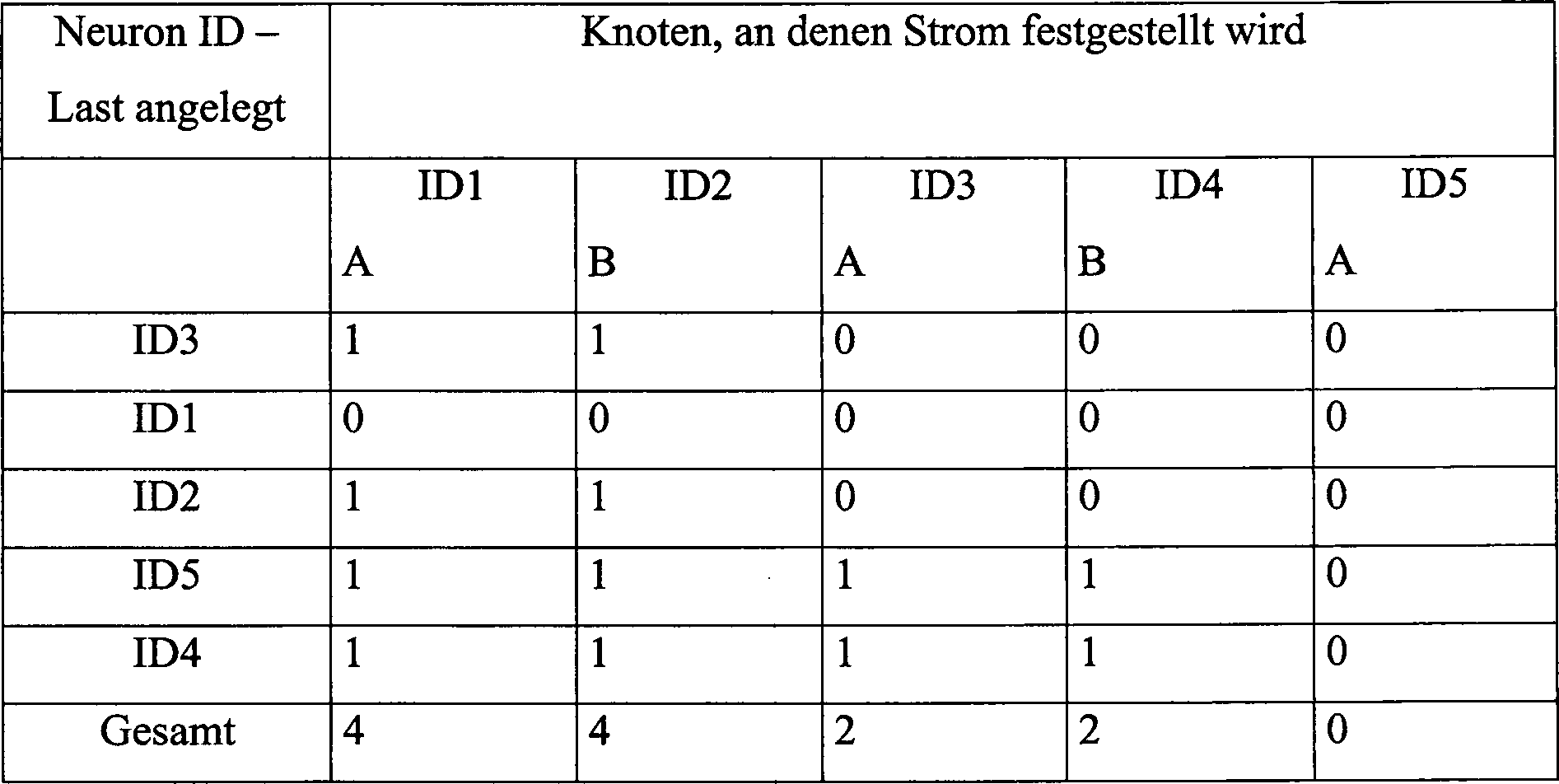
In
Tabelle 2 wird unter Verwendung des Schaltkreises der
4 die Anwesenheit von Strom
an den Primär-
und Sekundärknoten
auf fünf
der Wagen illustriert, wobei der Primärknoten selbst in die Zählung nicht einbezogen
wird, wenn er die Last anlegt. Als Alternative können auch die Abwesenheiten
gezählt
werden. Tabelle
2 Figur
4 – Selbstanwesenheiten
nicht gezählt
-
Es
wird festgestellt, dass die Wagen der ID2 und ID4 in eine andere
Richtung blicken als die Wagen der ID1, ID3 und ID5. Wenn die Primär- oder
Sekundärzählwerte
identisch sind, ist der Primärknoten
vor der oder zunächst
der Kopfeinheit. Sind die Zählwerte
unterschiedlich, bestimmt der höhere
Zählwert
die Orientierung für
einen Wagen. Dies ist aus der Tabelle 2 evident. Auch die Sequenz
der Zählwerte
von Wagen mit unterschiedlichen Zählwerten zeigt die Orientierung
an.
-
Durch
Lokalisierung des einzelnen Lastwiderstands 56 pro Wagen
zwischen den Stromsensoren 32 der primären und sekundären Kommunikationsknoten
kann die Orientierung der Wagen ebenfalls festgestellt werden.
-
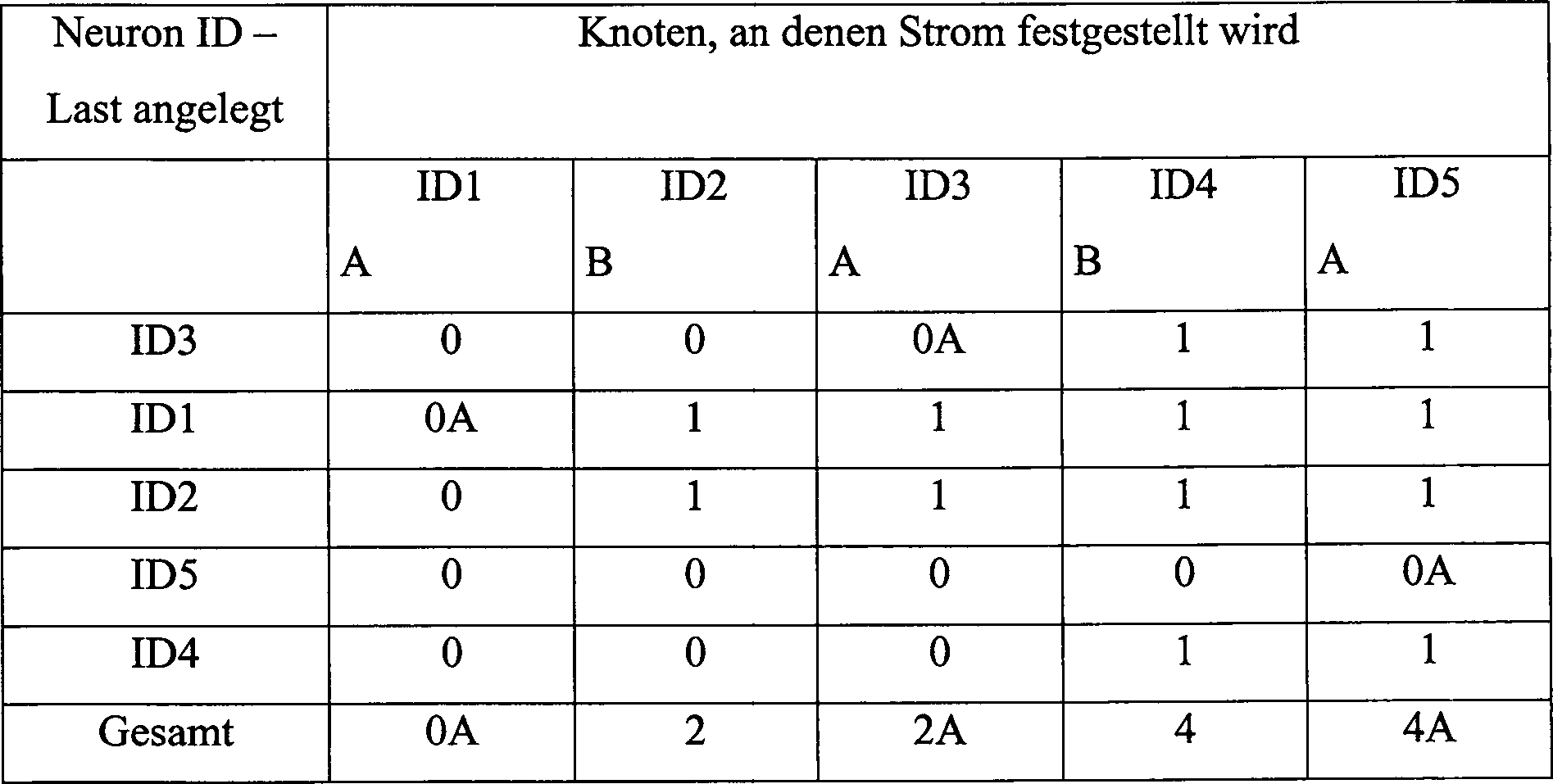
In
Tabelle 2A ist die Anwesenheit von Strom an den Primär- und Sekundärknoten
auf fünf
Wagen unter Verwendung des Schaltkreises der
4 und einschließlich des Primärknotens
selbst in der Zählung,
wenn dieser die Last anlegt, illustriert. Als Alternative können auch
die Abwesenheiten gezählt
werden. TABELLE
2A Figur
4 – Selbstanwesenheiten
gezählt
-
Die
Bestimmung, ob der primäre
oder sekundäre
Zählwert
für einen
Wagen höher
ist, legt die Orientierung des Wagens fest. Dies geht aus der Tabelle
2A hervor. Wiederum liefert die Zählungssequenz die Orientierung
sowie die Reihung der Wagen.
-
Ein
weiteres Ausführungsbeispiel
der vorliegenden Erfindung, das geeignet ist, die Orientierung des Wagens
zu bestimmen, ist in
5 illustriert.
Die primären
und sekundären
Knoten
40A und
40B sind jeweils identisch, und
jeder von ihnen besitzt nicht nur einen Stromsensor
32,
ein ID-Neuron
42 und ein Sende-Empfangsgerät
44,
sondern auch je einen Optokoppler
50, ein Festkörperrelais
54 und
einen Lastwider stand
56. In diesem Fall werden die primären und
sekundären
Knoten sequenziell betätigt
und als getrennte Knoten behandelt. Die resultierenden Zählwerte
während
der Sequenz sowie die Gesamtwerte sind in Tabelle 3 dargestellt. Tabelle
3 Figur
5 – Selbstanwesenheiten
nicht gezählt
-
In
Tabelle 3 wird der Knoten, in dem die Last angelegt ist, nicht gezählt. Dies
ergibt die Zahlen 0 – 9. Wird
der Knoten, der die Last angelegt hat, in die Zählung einbezogen, würde sich
jede Zahl um 1 erhöhen, weshalb
der Zählwert
1 – 10
wäre. Wenn
die Abwesenheiten gezählt
werden, wäre
der Zählwert
1 – 10
in umgekehrter Reihenfolge. Im Beispiel der Tabelle 3 sind die Wagen
ID2 und ID4 in andere Richtungen als die Wagen von ID1, ID3 und
ID5 gerichtet.
-
Obwohl
das Beispiel gezeigt hat, dass alle Wagen zwei Knoten haben, könnte – und würde auch
im Allgemeinen – der
Zug nur einige Wagen haben, die einer Orientierungsinformation bedürfen. Somit
könnten alle
Wagen zwei Knoten besitzen oder aber nur jene, für die eine Orientierungsinformation
erforderlich ist.
-
Ein
Blick auf die Tabelle 2A des selbstzählenden Stromsensors nur unter
Beachtung des Stromsensors A zeigt, dass die Wagen
1,
3 und
5,
welche den Stromsensor auf der Seite A näher am Kopfende als die Last
haben, einen Zählwert
von Eins haben, wenn sie die Last anlegen. Die Wagen, welche die
entgegengesetzte Orientierung haben, also die Wagen
2 und
4,
bei denen die Last näher
am Kopfende als der Stromsensor am A-Ende haben, weisen einen Nullzählwert auf,
wenn sie die Last anlegen. Mit der Verwendung eines einzelnen Stromsensors
32 und
einer einzelnen Last
56, wie in
2 dargestellt, kann folglich die Orientierung des
Wagen lokal festgestellt werden, wenn dieser Knoten die Last anlegt.
Das Ergebnis einer solchen Zählung für die Orientierung
für das
oben diskutierte Beispiel ist in Tabelle 4 dargestellt. In der Tabelle
ist ein A vorgesehen, wo festgestellt wurde, dass das A-Ende näher am Kopfende
ist als das B-Ende. Tabelle
4 Figur
2 – Selbstanwesenheiten
gezählt
-
Eine
Modifizierung des Fließdiagramms
der 3, so dass die Orientierung
einbezogen ist, unter Verwendung des Einzelsensors und bei Zählung der
Abwesenheiten ist in 6 illustriert.
Die Modifikation erfolgt nach dem Entscheidungsblock, ob am Wagen
Strom vorhanden ist. Ist Strom vorhanden, erfolgt die Feststellung,
ob an diesem Wagen die Last über
den Zug angelegt ist. Ist dies nicht der Fall, wird die Sequenz
zum nächsten
Wagen fortgesetzt. Das restliche Fließdiagramm ist das gleiche wie
das in 3, ausgenommen
die Meldung der Wagenorientierung. Ist Strom am Wagen vorhanden
und die Last an diesem Wagen über
den Zug angelegt, dann identifiziert der Wagen das A-Ende, oder
der Sensor ist gegen die Kopfeinheit gerichtet.
-
Ist
kein Strom an diesem Wagen anwesend, wird die Feststellung getroffen,
ob die Last an diesem Wagen über
die Zugleitung angelegt ist. Ist dies nicht der Fall, erhöht der Wagen
den Zähler
und setzt den Prozess wie in 3 fort.
Ist der Strom am Wagen nicht anwesend und die Last über diesen
Wagen angelegt, zeigt der Wagen an, dass das Ende B vorwärts ist,
also die Sensoren gegen das Ende des Zuges gerichtet. Der ausgewählte Wagen
wird von der Last getrennt.
-
Als
Variation der 3 meldet
der Wagen seinen aktuellen Zählwert
und seine Orientierung an die Kopfeinheit.
-
Tabelle
5 zeigt die Ergebnisse der Abwesenheitszählung. Tabelle
5 Figur
2 – Selbstabwesenheiten
gezählt
-
Als
Unterabschnitt des Prozesses der 6 kann
die Orientierung alleine unter Anwendung der Prozedur der 7 bestimmt werden. Die Kopfeinheit
HEU befiehlt den Start der Wagenorientierung. Das schließt das Abschalten
der 230-Volt-Quelle
und das Einschalten der 24 Volt zur Zugleitung durch die Kopfeinheit
ein. Dann befiehlt die Kopfeinheit den Start der Orientierungsfunktion.
Dies schließt
ein, dass Wagen Strom an die Stromsensoren anlegen und die Stromsensoren
getestet werden. Dies ist wie in den vorangehenden Verfahren der 3 und 6. Die Kopfeinheit befiehlt dann einem
Wagen, die Ladung über
die Zugleitung anzulegen. Dieser Wagen misst den Zugleitungsstrom
und bestimmt, ob Strom am Wagen anwesend ist. Ist Strom vorhanden, zeigt
dies an, dass das A-Ende des Wagens vorwärts ist, also die Sensoren
gegen die Kopfeinheit gerichtet sind. Wenn kein Strom am Wagen vorhanden
ist, zeigt der Wagen an, dass das B-Ende vorwärts ist, und der Stromsensor
gegen das Zugende gerichtet. Die Kopfeinheit setzt diesen Zyklus
fort, bis allen Wa gen befohlen wurde, eine Last über die Zugleitung anzulegen
und ihre Orientierung zu bestimmen. Wird festgestellt, dass es sich
um den letzten Wagen handelt, meldet jeder Wagen seine Orientierung
im Zug an das Kopfende. Damit endet das Wagenorientierungsverfahren.
-
Zwar
zeigen 2 und 5, wie die Last an der Kopfseite
der Zugleitung 10 bezüglich
der Stromsensoren angelegt wird, doch kann deren Position umgekehrt
werden. Dies würde
die Durchführbarkeit
des vorliegenden Systems bzw. der vorliegenden Methode nicht beeinträchtigen.
Es würden
sich nur die Zählwerte ändern, die
in den Tabellen erscheinen, wo der lastanlegende Knoten sich selbst
zählt.
-
Die
vorliegende Wagenreihungsbestimmung wurde mit Bezug auf die Verwendung
eines Lastwiderstands 56 und von Stromsensoren beschrieben.
Die Stromstärke
ist ein Parameter, der über
einen spezifischen Zugabschnitt gemessen und sequenziell selektiert
werden kann. Wie oben besprochen, kann ein Spannungssensor anstatt
eines Stromsensors verwendet werden. Auch kann die Bremsleitung 12 dazu
verwendet werden, einen Parameter zwischen einem der Wagen und einem
Ende des Zuges einzurichten. Dies erfordert die Fähigkeit,
die Bremsleitung von einem Wagen und einem Ende des Zuges von der
Bremsleitung vom Wagen zum anderen Zugende zu isolieren, und die
Fähigkeit,
in jedem Teil Druckunterschiede zu erzeugen. Die Wagenelektronik 30 müsste zudem
in der Lage sein, die Zustände
in der Bremsleitung zu erfassen. Wenn eine solche Ausrüstung und
solche Fähigkeiten
am Wagen verfügbar
sind, kann das vorliegende Verfahren durch sequenzielles Befehlen
einer Modifikation des Bremsleitungsdrucks an den einzelnen Wagen
und Überwachung
einer Reaktion an den anderen Wagen durchgeführt werden.
-
Zwar
wurde die vorliegende Erfindung im Detail beschrieben und illustriert,
doch ist klar darauf hinzuweisen, dass dies nur illustrativen und
beispielhaften Charakter und keine einschränkende Wirkung hat. Der Geltungsbereich
der vorliegenden Erfindung wird ausschließlich durch die angehängten Patentansprüche beschränkt.