-
Hintergrund der Erfindung
-
Die vorliegende Erfindung betrifft eine Vorrichtung mit einem Transmitter für eine Prozeßsteuerung. Die vorliegende Erfindung betrifft insbesondere einen Transmitter zum Erzeugen von mit einer Strömung in einem Rohr in Beziehung stehenden Signalen.
-
In einer Prozeßsteuerung wird eine Fluidbewegung durch Rohre durch eine Reihe von mit den Rohren verbundenen Prozeßsteuerungstransmittern überwacht. Die Transmitter weisen Sensoren auf, die den Unterschied zwischen zwei Drücken in einem Rohr (d. h. einen Differenzdruck) erfassen. Aus der Differenzdruckmessung bestimmen diese Transmitter den Massendurchfluß des Fluids im Rohr.
-
Im allgemeinen erfassen Transmitter den Differenzdruck über ein Hindernis im Rohr. Ein typisches Hindernis ist eine Lochplatte, die eine in das Rohr eingesetzte perforierte Scheibe ist. Obwohl durch solche Scheiben ein großer und leicht erfaßbarer Druckabfall erzeugt wird, wird dadurch die Massendurchflußberechnung kompliziert, weil mehrere Korrekturfaktoren in die Berechnung einfließen, um die durch die Scheibe erzeugten Fluidströmungsunterbrechungen zu berücksichtigen. Die Scheiben verursachen außerdem einen wesentlichen Druckverlust im Rohr. Durch diesen Druckverlust wird teure Energie nutzlos verschwendet.
-
Bekannte Vorrichtungen zur Bestimmung der Durchflussrate eines fluiden Mediums sind beispielsweise in den Druckschriften
EP 27402 A2 ,
DE 4308313 A1 ,
US 1,229,718 A , sowie in der
JP 06094490 A offenbart.
-
Kurze Beschreibung der Erfindung
-
Die Erfindung ist bestimmt durch den Gegenstand des unabhängigen Anspruchs 1. Weitere bevorzugte Ausführungsformen sind in den abhängigen Ansprüchen definiert. Insbesondere erzeugt ein Drucktransmitter Signale bezüglich eines Durchflusses in einem Rohr. Der Transmitter weist einen Drucksensor auf, der mit zwei Durchlässen im Rohr in Fluidverbindung steht, und das Rohr weist zwischen den beiden Durchlässen einen im wesentlichen konstanten Querschnitt auf. Gemäß Aspekten der Erfindung ist eine Schaltung mit dem Drucksensor verbunden, die einen mit dem Fluiddurchfluß in Beziehung stehenden digitalen Wert als Funktion der Druckdifferenz zwischen den beiden Durchlässen erzeugt.
-
Kurze Beschreibung der Zeichnungen
-
1 zeigt ein herkömmliches Massendurchflußmeßsystem;
-
2 zeigt eine Ausführungsform eines erfindungsgemäßen Massendurchflußtransmittersystems;
-
3 zeigt eine Querschnittansicht eines in der vorliegenden Erfindung verwendbaren Massendurchflußtransmitters;
-
4 zeigt ein Blockdiagramm einer dem Transmitter von 3 zugeordneten Verarbeitungsschaltung;
-
5 zeigt einen Graphen der Reynoldsschen Zahl als Funktion des Reibungsfaktors und der Rohrrauhigkeit;
-
6 zeigt ein Ablaufdiagramm eines Verfahrens zum Berechnen des Massendurchflusses;
-
7 zeigt ein Ablaufdiagramm eines zweiten Verfahrens zum Berechnen des Massendurchflusses;
-
8 zeigt eine zweite Ausführungsform eines erfindungsgemäßen Massendurchflußtransmittersystems;
-
9 zeigt eine elliptische Durchlaßöffnungsform; und
-
10 zeigt eine dritte Ausführungsform eines erfindungsgemäßen Massendurchflußtransmittersystems.
-
Ausführliche Beschreibung der bevorzugten Ausführungsformen
-
Gemäß einem Aspekt der vorliegenden Erfindung wird das Erfordernis zur Verwendung von Lochplatten im Rohr eliminiert, indem der Druckabfall, der entlang eines Rohrabschnitts auftritt, in dem keine Hindernisse angeordnet sind und der einen im wesentlichen konstanten Querschnitt aufweist, exakt erfaßt wird. Basierend auf dieser exakten Messung verwendet die vorliegende Erfindung neuartige Techniken zum Erzeugen von mit dem Fluiddurchfluß in Beziehung stehenden digitalen Werten.
-
1 zeigt ein herkömmliches Massendurchflußmeßsystem 100. Ein Fluid strömt in einer Richtung 102 durch ein Rohr 104, in dem eine Lochplatte 106 angeordnet ist. Strömungsaufwärts von der Lochplatte 106 wird durch eine Öffnung 108 eine Fluidverbindung zwischen dem Rohr 104 und einer Rohrleitung 110 bereitgestellt. Die Rohrleitung 110 erstreckt sich von der Öffnung 108 zu einem Transmitter 112, und eine zweite Rohrleitung 114 erstreckt sich vom Transmitter 112 zu einer strömungsabwärts angeordneten Öffnung 116. Sensoren im Transmitter 112 erzeugen ein eine Druckdifferenz zwischen der Öffnung 108 und der Öffnung 116 anzeigendes Differenzdrucksignal. Dieses Differenzdrucksignal wird über Prozeßsteuerungsleitungen 122 zu einem Kontrollraum 120 übertragen.
-
Der durch die Lochplatte 106 erzeugte Druckabfall ist relativ groß, so daß die Sensoren im Transmitter 112 die Druckdifferenz zwischen den beiden Öffnungen leichter exakt erfassen können. Dieser große Druckabfall stellt jedoch einen wesentlichen und teuren Energieverlust dar, weil Energie erforderlich ist, um das Fluid unter Druck zu setzen. Außerdem muß, weil der Massendurchfluß auf einer einzigen Rohrlänge manchmal durch mehrere zehn Transmitter überwacht wird, die für jede Lochplatte erforderliche zusätzliche Druckbeaufschlagung mit der Gesamtanzahl der Transmitter multipliziert werden, was zu einer großen, teuren und unnötigen Energieverschwendung führt.
-
Außerdem muß, um den herkömmlichen Transmitter in ein Rohr einzusetzen, ein Rohrabschnitt entfernt werden, damit die Lochplatte eingesetzt werden kann. Dies ist ein teures Verfahren, durch das die Wahrscheinlichkeit von Leckbildungen im Rohrsystem zunimmt.
-
Lochplatten sind außerdem unerwünscht, weil bestimmte Prozeßströmungen Substanzen enthalten, die sich an der Lochplatte festsetzen können. Dadurch wird ein zusätzlicher Wartungsaufwand erforderlich, und der durch die Lochplatte verursachte unwirtschaftliche Druckabfall nimmt zu. Durch eine solche Verschmutzung oder Kontaminierung der Platte nimmt außerdem die Genauigkeit der durch herkömmliche Transmitter durchgeführten Durchflußmessung ab.
-
2 zeigt ein erfindungsgemäßes Druckmeßsystem 130. Ein Rohr 132 transportiert ein in eine Richtung 134 strömendes Fluid an Öffnungen 136 und 138 vorbei. Die Öffnungen 136 und 138 öffnen sich zu Impulsrohren 140 bzw. 142. Die vorzugsweise gleichen Impulsrohre 140 und 142 sind mit einem Transmitter 144 verbunden, der einen (nachstehend ausführlich dargestellten) Differenzdrucksensor aufweist. Der Transmitter 144 kann ein beliebiger in der Prozeßsteuerungsindustrie verwendeter ”Transmitter”-typ sein, z. B. ein von Rosemount Inc., Eden Prairie, Minnesota erhältlicher Transmitter des Modells 1151 oder des Modells 3051. Der Differenzdrucksensor erzeugt ein Differenzdrucksignal, das vom Transmitter 144 über eine Prozeßsteuerungsschleife 148 zu einem Kontrollraum 146 übertragen wird. Die Schleife 148 kann gemäß verschiedenen Industrienormen betrieben werden, sie kann z. B. eine 4–20 mA-, eine HART®-, eine Feldbus-, eine Profibus-Schleife, usw. sein. Gemäß einer Ausführungsform wird der Transmitter 144 durch über die Schleife 148 empfangene Leistung vollständig mit Leistung versorgt.
-
Gemäß einem Aspekt wird in einem erfindungsgemäßen Transmitter die Erkenntnis ausgenutzt, daß aufgrund der Reibung zwischen dem Fluid und dem Rohr ein linearer Druckabfall von der Öffnung 136 zur Öffnung 138 auftritt, und daß die Quadratwurzel dieses Druckabfalls der Geschwindigkeit des Fluids proportional ist.
-
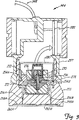
3 zeigt einen Querschnitt des koplanaren Transmitters 144 von 2 mit einem unteren Sensorgehäuse 255 und einem oberen Elektronikmodul 257. Der Transmitter 144 weist zwei Trennmembranen 260A und 260B auf, die mit Impulsrohrleitungen 140 und 142 (in 3 nicht dargestellt) in Fluidverbindung stehen. Die Trennmembranen 260A und 260B übertragen den Druck in den Impulsrohrleitungen 140 bzw. 142 zu zwei durch Kammern 258A bzw. 258B gebildeten Fluidverbindungskanälen, zu Durchgangsöffnungen 256A bzw. 256B und zu Einlaßrohren 254A bzw. 254B. Der Differenzdrucksensor 252 ist zwischen den Einlaßrohren 254A, 254B angeordnet und weist eine zwischen kapazitiven oder Kondensatorplatten 272, 274, die Kammern 276 bzw. 278 bilden, angeschweißte Sensormembran 270 auf. Durch Druckdifferenzen zwischen den Kammern 276, 278 wird die Sensormembran 270 ausgelenkt, wodurch sich die Kapazitätswerte zwischen den kapazitiven Platten 272, 274 und der Sensormembran 270 ändern. Eine Sensorschalt- oder -leiterglatte 280 korrigiert auf diesen Kapazitätswerten basierende Signale, und eine Ausgangsleiterplatte 282 erzeugt damit in Beziehung stehende Ausgangssignale auf der Prozeßsteuerungsschleife 148.
-
4 zeigt ein Blockdiagramm elektronischer Bauteile auf der Sensorleiterplatte 280 und der Ausgangsleiterplatte 282. Die elektronischen Bauteile auf der linken Seite der unterbrochenen Linie 400 in 4 sind auf der Ausgangsleiterplatte angeordnet, während die Bauteile auf der rechten Seite der Linie 400 auf der Sensorleiterplatte 280 angeordnet sind. Die Sensorleiterplatte 280 ist im Sensorgehäuse 255 des Transmitters 144 angeordnet, und die Ausgangsleiterplatte 282 ist im Elektronikmodul 257 des Transmitters 144 angeordnet.
-
Die Ausgangsleiterplatte 282 weist eine Ein-/Ausgabeschaltung 402 auf, die über die Steuerschleife 148 zugeführte Leistung in Versorgungsspannungen auf dem Bus 408 umwandelt. Ein Mehrkanal-A/D-Wandler 412 ist mit dem Differenzdrucksensor 252 verbunden und führt einem Mikroprozessor 416 über den Bus 414 den erfaßten Differenzdruck darstellende Signale zu. In alternativen Ausführungsformen empfängt der A/D-Wandler 412 außerdem Signale von einem Temperatursensor 410 und einem Absolutdrucksensor 310. Ein Speicher 418 speichert vorzugsweise Informationen über die Sensoren und die Sensorleiterplatte 280. Das System arbeitet gemäß einem durch einen Taktgeber 422 erzeugten Taktsignal 420. Wenn das Ausgangssignal des Transmitters 144 ein analoges Signal ist, wandelt ein D/A-Wandler 424 digitale Signale auf dem Bus 414 in Analogsignale um, die über eine analoge Leitung 428 der Ein-/Ausgabeschaltung 402 zugeführt werden. Wenn das Ausgangssignal des Transmitters ein digitales Signal ist, wie beispielsweise in einem Feldbusprotokoll, oder eine Kombination aus einem analogen und einem digitalen Signal, wie beispielsweise in einem HART-Protokoll, werden die digitalen Signale auf dem Bus 414 der Ein-/Ausgabeschaltung 402 direkt zugeführt.
-
Der Mikroprozessor 426 empfängt digitale Signale auf dem Bus 414 und ist mit einem nichtflüchtigen Speicher 430 und mit einem RAM-Speicher 432 verbunden. Der Mikroprozessor 426 empfängt außerdem digitale Signale auf einem bidirektionalen Bus 434 von der Ein-/Ausgabeschaltung 402. Beispiele von von der Ein-/Ausgabeschaltung 402 empfangenen digitalen Signalen sind Signale, die den Rohrdurchmesser und die relative Rohrrauhigkeit darstellen und zum Berechnen des Massendurchflusses verwendbar sind, wie nachstehend beschrieben wird.
-
Einer der Vorteile der vorliegenden Erfindung besteht darin, daß Massendurchflußberechnungen ermöglicht werden, in denen weniger empirisch bestimmte Ausdrucke verwendet und durch die daher exaktere Ergebnisse erzeugt werden. In der Vergangenheit wurde der Massendurchfluß unter Verwendung einer Lochplatte und der Gleichung: Qmass = NCdEY1d2√(ΔP)ρ (Gleichung 1) berechnet; wobei Q den Massendurchfluß; N einen Einheitenumwandlungsfaktor; Cd einen Durchflußkoeffizienten; E einen Anflußgeschwindigkeitsfaktor; Y1 einen Gasexpansionsfaktor; d einen Durchmesser des Differenzdruckerzeugungselements; ρ die Fluiddichte und ΔP den durch den Differenzdrucksensor gemessenen Differenzdruck bezeichnen. Viele dieser Ausdrücke müssen hinsichtlich des bestimmten Fluids im Rohr angepaßt werden, und einige dieser Ausdrücke müssen kontinuierlich verfeinert werden, um Änderungen der Temperatur oder des statischen Drucks des Fluids zu berücksichtigen.
-
Ohne Verwendung einer Lochplatte werden mehrere Faktoren aus Gleichung 1 eliminiert. Insbesondere sind E, der Anflußgeschwindigkeitsfaktor, Y1, der Gasexpansionsfaktor und d, der Durchmesser des Differenzdruckerzeugungselements, in der vorliegenden Erfindung konstant. Daher reduziert sich die Gleichung für den Massendurchfluß in der vorliegenden Erfindung auf: Qmass = Cdk1√(ΔP)ρ, (Gleichung 2) wobei k1 eine Konstante; Cd einen Reibungsfaktorkoeffizienten; ΔP den Differenzdruck und ρ die Fluiddichte bezeichnen.
-
In herkömmlichen Systemen ist der Durchflußkoeffizient Cd sowohl eine Funktion der Form der Öffnung in der Lochplatte als auch eine Funktion der Geschwindigkeit, der Dichte und der Viskosität der Strömung. In der vorliegenden Erfindung wird der Durchflußkoeffizient in einen Reibungsfaktorkoeffizient umgewandelt, der eine Funktion zweier Variablen ist: der Reynoldsschen Zahl und des Reibungsfaktors des Rohrs.
-
Wie im Graph von 5 dargestellt, steht der Reibungsfaktor mit der Reynoldsschen Zahl und mit der relativen Rauhigkeit des Rohrs in Beziehung. In 5 ist die Reynoldssche Zahl auf der horizontalen Achse 480 dargestellt, der Reibungsfaktor ist auf der linken vertikalen Achse 482 dargestellt, und die relative Rauhigkeit des Rohrs ist auf der rechten vertikalen Achse 484 dargestellt. Für kleine Reynoldssche Zahlen unter 5·103 ist die Beziehung zwischen dem Reibungsfaktor und der Reynoldsschen Zahl linear und unabhängig von der relativen Rohrrauhigkeit. Für höhere Reynoldssche Zahlen hängt die Beziehung zwischen dem Reibungsfaktor und der Reynoldsschen Zahl von der relativen Rohrrauhigkeit ab. Diese Beziehung kann in einer Verweistabelle im Transmitter gespeichert sein oder basierend auf einer empirischen Gleichung berechnet werden.
-
In 5 sind für verschiedene relative Rauhigkeiten mehrere verschiedene Linien dargestellt, die verschiedene Beziehungen zwischen dem Reibungsfaktor und der Reynoldsschen Zahl darstellen. Beispielsweise zeigt eine Linie 486 eine Beziehung zwischen dem Reibungsfaktor und der Reynoldsschen Zahl bei einer relativen Rohrrauhigkeit von 0,03.
-
Die Reynoldssche Zahl ist eine Funktion des Massendurchflusses und kann unter Verwendung der folgenden Gleichung berechnet werden: RD = 4Q / πDμ, (Gleichung 3) wobei RD die Reynoldssche Zahl; Q den Massendurchfluß, π eine mathematische Konstante, D den Innendurchmesser des Rohrs und μ die Viskosität des Fluids bezeichnen.
-
Aufgrund der Unabhängigkeit ihrer Variablen können die Gleichungen 2 und 3 durch eine iterative Näherung gelöst werden, die im Ablaufdiagramm von 6 dargestellt ist. In einem ersten Schritt 700 werden die Dichte ρ und die Viskosität μ aus dem Druck und der Temperatur des Fluids berechnet. Dann wird in Schritt 702 ein nomineller Reibungsfaktorkoeffizient ausgewählt. Dieser nominelle Wert wird basierend auf erwarteten Reibungsfaktorkoeffizienten für die bestimmte Fluidströmung ausgewählt. In Schritt 704 wird der Massendurchfluß Qi-1 unter Verwendung des nominellen Reibungsfaktorkoeffizienten und der Gleichung Qi-1 = Cd-nomk1√ΔP√ρ (Gleichung 4) berechnet; wobei Qi-1 den Massendurchfluß; Cd-nom den nominellen Reibungsfaktorkoeffizienten; k1 eine Konstante; ΔP einen Differenzdruck und ρ die Dichte des Fluids bezeichnen.
-
Die Reynoldssche Zahl RD wird in Schritt 706 unter Verwendung von Gleichung 3 und Qi-1 von Gleichung 4 berechnet.
-
Basierend auf dem berechneten Wert RD und einer empirischen oder theoretischen Beziehung zwischen RD und dem Reibungsfaktorkoeffizienten Cd wird in Schritt 708 ein Wert für den Reibungsfaktorkoeffizienten Cd berechnet.
-
In Schritt 710 wird ein aktueller Massendurchfluß Q1 unter Verwendung von Gleichung 2 und des berechneten Reibungsfaktorkoeffizienten Cd berechnet. In einem Entscheidungsschritt 712 wird ein Konvergenzkriterium mit der Differenz zwischen dem aktuellen Massendurchfluß Q1 und dem vorher berechneten Massendurchfluß Qi-1 verglichen. Wenn die Differenz zwischen dem aktuellen Massendurchfluß und dem zuletzt berechneten Massendurchfluß kleiner ist als das Konvergenzkriterium, wird der aktuelle Massendurchfluß Qi in Schritt 714 als der berechnete Massendurchfluß ausgegeben. Wenn die Differenz zwischen dem aktuellen Massendurchfluß und dem zuletzt berechneten Massenurchfluß nicht kleiner ist als das Konvergenzkriterium, wird der Wert des aktuellen Massendurchflusses in Schritt 716 als vorangehender Massendurchfluß Qi-1 festgelegt, und die Schritte 706, 708, 710 und 712 werden wiederholt.
-
Um die Berechnungen weiter zu vereinfachen, können die Dichte und die Viskosität als konstant vorausgesetzt werden. 7 zeigt ein Ablaufdiagramm eines Verfahrens zum Berechnen des Massendurchflusses, wenn eine konstante Dichte und eine konstante Viskosität vorausgesetzt werden, wobei in Schritt 720 ein nomineller Reibungsfaktorkoeffizient ausgewählt wird. Dieser nominelle Reibungsfaktorkoeffizient wird verwendet, um in Schritt 722 einen Massendurchfluß Qi-1 unter Verwendung der Gleichung: Qi-1 = Cd-nomk2√ΔP (Gleichung 5) zu berechnen; wobei Cd-nom den nominellen Reibungsfaktorkoeffizienten; k2 eine Konstante und ΔP den Differenzdruck bezeichnen. Der spezifische Wert von k2 hängt von vielen Faktoren ab, z. B. vom Innendurchmesser des Rohrs und vom Abstand zwischen den Differenzdruckdurchlaßöffnungen. In Schritt 724 wird der berechnete Massendurchfluß Qi-1 zum Berechnen einer Reynoldsschen Zahl RD unter Verwendung der folgenden Gleichung: RD = k3Qi-1 (Gleichung 6) verwendet; wobei k3 eine Konstante ist, die erhalten wird, indem der Wert 4 durch das Produkt aus der Viskosität der Strömung, dem Innendurchmesser des Rohrs und π geteilt wird.
-
Basierend auf dem berechneten Wert RD wird in Schritt 726 ein Reibungsfaktorkoeffizient Cd berechnet. Der Reibungsfaktorkoeffizient kann entweder auf einer empirischen Beziehung oder auf einer theoretischen Beziehung zwischen RD und Cd basieren. Nachdem Cd berechnet wurde, wird in Schritt 728 ein aktueller Massendurchfluß Qi unter Verwendung der Gleichung: Q = Cdk2√ΔP (Gleichung 7) berechnet; wobei k2 die gleiche Konstante ist, wie die in Gleichung 5 verwendete Konstante.
-
Im Entscheidungsblock 730 wird der aktuelle Massendurchfluß Qi mit dem vorangehenden Massendurchfluß Qi-1 verglichen, um festzustellen, ob die Differenz zwischen den beiden Werten kleiner ist als das Konvergenzkriterium. Wenn die Differenz kleiner ist als das Konvergenzkriterium, wird der aktuelle Massendurchfluß Qi in Schritt 732 als Massendurchfluß ausgegeben. Wenn die Differenz nicht kleiner ist als das Konvergenzkriterium, wird der vorangehende Massendurchfluß Qi-1 in Schritt 734 auf den Wert des aktuellen Massendurchflusses gesetzt, und die Schritte 724, 726, 728 und 730 werden wiederholt.
-
Bei ausreichend großen Reynoldsschen Zahlen ist der Reibungsfaktorkoeffizient konstant, und der Massendurchfluß ist unabhängig von der Reynoldsschen Zahl, der Viskosität oder der Dichte des Fluids. Für solche Reynoldsschen Zahlen lautet die Gleichung zum Berechnen des Massendurchflusses: Q = k4√ΔP√ρ (Gleichung 8) wobei Q den Massendurchfluß, ρ die Dichte, k4 eine Konstante und ΔP den Differenzdruck bezeichnen. Weil der Reibungsfaktorkoeffizient konstant ist, wird er in die Konstante k4 gefaltet. Es sind keine Iterationen erforderlich, wenn die Reynoldssche Zahl als konstant betrachtet wird.
-
Die vorliegende Erfindung kann in Verbindung mit mehreren verschiedenen Durchlaßformen verwendet werden. Beispielsweise ist in 8 ein erfindungsgemäßer Transmitter 520 mit Impulsrohrleitungen 522 und 524 verbunden, die über Öffnungen 530 und 532 mit dem Inneren ringförmiger Buchsen 526 und 528 in Fluidverbindung stehen. Die Buchse 526 ist an ringförmigen Schweißstellen oder Schweißnähten 538 bzw. 540 an Rohrabschnitten 534 und 536 angeschweißt, so daß zwischen den beiden Rohrabschnitten ein ringförmiger Zwischenraum 542 verbleibt. Ähnlicherweise ist die Buchse 528 durch ringförmige Schweißstellen oder Schweißnähte 546 bzw. 548 mit Rohrabschnitten 544 und 536 verbunden, so daß zwischen den beiden Rohrabschnitten ein Zwischenraum 550 verbleibt. Die ringförmigen Buchsen 526 und 528 tragen dazu bei, durch Wirbel in der Strömung verursachte Druckmeßfehler zu eliminieren.
-
9 zeigt eine zweite Ausführungsform eines in einem Rohr ausgebildeten Durchlasses. Der Durchlaß 582 bildet eine Öffnung, die nicht rund, sondern elliptisch ist, wobei ihre Abmessung quer zur allgemeinen Fluidströmungsrichtung 586 größer ist als ihre Abmessung in der allgemeinen Fluidströmungsrichtung 586.
-
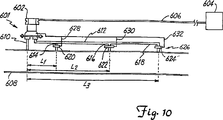
10 zeigt eine erfindungsgemäße Drucktransmitteranordnung 601 mit einem über Steuerleitungen 606 mit einem Steuermodul 604 verbundenen Transmitter 602. Der Transmitter 602 ist über eine erste Rohrleitung 610 und eine Rohrleitungsanordnung 612, die aus einer zweiten Rohrleitung 614, einer dritten Rohrleitung 616 und einer vierten Rohrleitung 618 gebildet wird, mit dem Steuermodul 604 verbunden. Ventile 620, 622 und 624 einer Ventilanordnung 626 trennen die Rohrleitungen 614, 616 bzw. 618 vom Rohr 608. Die Ventile 620, 622 und 624 werden über am Transmitter 602 befestigte Steuerleitungen 628, 630 bzw. 632 gesteuert. Die Ventile 620, 622 und 624 werden entweder direkt durch den Transmitter 602 oder durch das Steuermodul 604 über den Transmitter 602 gesteuert.
-
Die Drucktransmitteranordnung 601 ermöglicht es dem Drucksensor im Drucktransmitter 602, verschiedene Positionen entlang der Länge des Rohrs anzusteuern. Wenn die Fluidströmung keinen ausreichenden Differenzdruck zwischen den Rohrleitungen 610 und 614 erzeugt, können die Ventile 620 und 624 geschlossen werden, und das Ventil 622 kann geöffnet werden. Durch Schließen der Ventile 620 und 624 und Öffnen des Ventils 622 wird der Differenzdruck zwischen den Rohrleitungen 610 und 616 gemessen. Weil die Rohrleitung 616 weiter entfernt von der Rohrleitung 610 angeordnet ist, ist der Druckabfall von der Rohrleitung 610 zur Rohrleitung 616 größer als der Druckabfall von der Rohrleitung 610 zur Rohrleitung 614. Durch Erhöhen des Druckabfalls zwischen den beiden mit dem Sensor verbundenen Rohrleitungen kann dem Sensor ein innerhalb des Meßbereichs des Sensors liegender Differenzdruck zugeführt werden.
-
Ähnlicherweise kann, wenn die Fluidströmung einen zu hohen Differenzdruck zwischen den Rohrleitungen 610 und 618 erzeugt, das Ventil 624 geschlossen und das Ventil 620 geöffnet werden, um den dem Sensor zugeführten Differenzdruck zu reduzieren. Ähnlicherweise können, wenn der Druck zwischen den Rohrleitungen 616 und 610 zu groß für den Sensor ist, die Ventile 622 und 624 geschlossen werden, und das Ventil 620 kann geöffnet werden, so daß der Druckabfall zwischen den Rohrleitungen 610 und 614 gemessen wird.
-
Um die Berechnungen zu vereinfachen, kann der Transmitter einem Rohrabschnitt zugeordnet sein, der so hergestellt ist, daß er eine gewünschte relative Rauhigkeit aufweist. Ein solcher Rohrabschnitt ist in 2 schematisch dargestellt, wobei an den Enden des Rohrs 132 zwei Flanschenden 508 und 510 ausgebildet sind, um zu ermöglichen, daß der Rohrabschnitt in eine Öffnung in einer Rohrleitung eingeführt und damit verbunden werden kann. Die Rauhigkeit des Rohrabschnitts kann während des Rohrformungsvorgangs, durch Abrieb, z. B. durch Sandstrahlen, oder dadurch erzeugt werden, daß spiralförmige Nuten in die gesamte oder in einen Teil der Rohroberfläche geschnitten werden.
-
Obwohl die vorliegende Erfindung unter Bezug auf bevorzugte Ausführungsformen beschrieben wurde, ist für Fachleute ersichtlich, daß innerhalb des Schutzumfangs der Erfindung Änderungen vorgenommen werden können.