-
TECHNISCHES GEBIET
-
Die Erfindung betrifft ein automatisches Ein-/Ausparksystem für ein Fahrzeug nach dem Oberbegriff des Anspruchs 1, ein Reifen-Windup-Ausgleichssystem für ein Fahrzeug nachh dem Oberbegriff des Anspruchs 5 sowie ein Fahrzeug nach dem Oberbegriff des Anspruchs 11. Die Offenbarung betrifft insbesondere Fahrzeuglenksysteme mit Kraftunterstützung und insbesondere die Milderung der Auswirkungen von Reifen-Windup auf ein Lenksystem während automatischer Ein-/Ausparkvorgänge.
-
HINTERGRUND
-
Ein Reifen wird an einem Fahrzeugrad montiert, um Traktion zwischen dem Fahrzeug und der Fahrbahn sowie ein nachgiebiges Polster zum Auffangen von Stößen bereitzustellen. Die meisten Reifen sind aufblasbare pneumatische Strukturen, die einen ringförmigen Körper aus Korden und Drähten umfassen, der mit Gummi umhüllt und allgemein mit Druckluft befüllt ist, um ein aufblasbares Polster zu bilden.
-
Aufgrund der Konstruktion eines Reifens kann ein Reifen als eine Feder wirken und potentielle Energie speichern, wenn das Rad gedreht wird. Diese federartige Wirkung wird durch die Reibung der Fahrbahnoberfläche verursacht, die sich dem Drehen des zu einer Bodenaufstandsfläche des Reifens benachbarten Abschnitts des Reifens widersetzt. Wenn das Rad gedreht wird, drehen sich in der Nähe des Rads befindliche Abschnitte des Reifens mit dem Rad, während in der Nähe der Bodenaufstandsfläche befindliche Abschnitte des Reifens der Drehbewegung widerstehen können. Folglich kann sich ein Abschnitt des Reifens zwischen dem Rad und der Aufstandsfläche elastisch verformen. Die elastische Verformung des Reifens, oder genauer der Wunsch des Reifens, in eine nicht verformte Form zurückzukehren, liefert die potenzielle Energie, die als Reifen-Windup bezeichnet wird.
-
Automatisches Ein-/Ausparken, das auch als Active Park Assist (aktive Einparkhilfe) bekannt ist, ist ein unabhängiges Fahrzeugrangiersystem, das ein Fahrzeug in eine oder aus einer Parklücke bewegt (Einparken und Ausparken). Parklücken können parallele, senkrechte oder schräge Parklücken umfassen. Das Ziel des automatischen Ein-/Ausparksystems ist es, den Komfort und die Sicherheit des Fahrens in beschränkten Umgebungen, in denen viel Aufmerksamkeit und Erfahrung zum Lenken des Fahrzeugs erforderlich ist, zu verbessern. Das Ein-/Ausparkmanöver wird mithilfe einer koordinierten Steuerung des Lenkwinkels und der Geschwindigkeit erreicht, die die tatsächliche Situation in der Umgebung berücksichtigt, um eine kollisionsfreie Bewegung innerhalb des verfügbaren Raums zu gewährleisten.
-
Ein automatisches Ein-/Ausparksystem gemäß dem Oberbegriff von Anspruch 1 ist aus der
US 2008 / 0 091 320 A1 bekannt. Dieses Dokument offenbart ein Verfahren, wobei ein erster Korrekturkoeffizient und ein zweiter Korrekturkoeffizient auf der Grundlage einer Lenkkraft, die von einem Fahrer auf ein Lenkrad ausgeübt wird, ermittelt werden. Ein Lenkaktuator wird auf der Grundlage eines elektrischen Aktuatorantriebsstroms gesteuert, der durch Addition des Produkts eines elektrischen Stroms für die automatische Lenkung und eines ersten Korrekturkoeffizienten zum Produkt eines elektrischen Stroms für die Servolenkung und eines zweiten Korrekturkoeffizienten erhalten wird. Bei einer Erhöhung der Lenkkraft nimmt der erste Korrekturkoeffizient ab und der zweite Korrekturkoeffizient zu, so dass der Anteil der Servolenkung im Verhältnis zum Anteil der automatischen Lenkung steigt.
-
Ein Reifen-Windup kann deutlicher hervortreten, wenn Reifen an einem Fahrzeug gedreht werden, während es sich langsam oder gar nicht bewegt, wie z.B. wenn das Fahrzeug einen automatischen Ein-/Ausparkvorgang ausführt. Während oder beim Beenden eines automatischen Ein-/Ausparkvorgangs kann das Windup des Reifens verursachen, dass der Lenkradwinkel zu einem anderen Winkel zuckt, wenn der Servolenkmotor aufhört, Drehmoment an das Lenksystem bereitzustellen. Dies kann auch als ein Lenkradruck bezeichnet werden. Ein automatischer Ein-/Ausparkvorgang kann dadurch gestoppt werden, dass ein Bediener nach dem Lenkrad greift, und falls der Reifen ein Windup aufweist, wenn der Servolenkmotor das an das Lenksystem gelieferte Drehmoment abbaut, kann das Lenkrad unerwünschterweise zu einem neuen Winkel in den Händen des Bedieners zucken.
-
KURZDARSTELLUNG
-
Die Lösung vorliegend genannten Problems erfolgt durch ein automatisches Ein-/Ausparksystem mit den Merkmalen des Anspruchs 1, durch ein Reifen-Windup-Ausgleichssystem mit den Merkmalen des Anspruchs 5 sowie durch ein Fahrzeug mit den Merkmalen des Anspruchs 11. Vorteilhafte Weiterbildungen ergeben sich aus den Unteransprüchen und der nachfolgenden Beschreibung.
-
Ein Aspekt dieser Offenbarung ist auf ein automatisches Ein-/Ausparksystem für ein Fahrzeug gerichtet, das einen Servolenkmotor, einen Lenkradmomentsensor und eine mit dem Lenkradmomentsensor gekoppelte Steuerung aufweist. Der Servolenkmotor ist derart ausgelegt, dass er ein Servolenkmotormoment für das Fahrzeug bereitstellt. Der Lenkradmomentsensor ist derart ausgelegt, dass er das an ein Lenkrad von einem Bediener angelegte Drehmoment erfasst. Die Steuerung ist derart programmiert, dass sie als Reaktion darauf, dass ein Drehmoment an das Lenkrad während eines automatischen Ein-/Ausparkvorgangs angelegt wird, das Servolenkmotormoment des Servolenkmotors rampenartig herabsetzt.
-
Die Steuerung kann derart programmiert sein, dass sie das Drehmoment des Servolenkmotors über eine eingestellte Zeitdauer rampenartig herabsetzt. Die Steuerung ist außerdem derart programmiert, dass sie den Betrieb des Servolenkmotors zurücksetzt, um ein Servolenkmotormoment auf der Grundlage einer Fahrereingabe an das Lenkrad zum Lenken des Fahrzeugs bereitzustellen. Die Steuerung ist außerdem derart programmiert, dass sie beim Erhalten eines Hinweises auf eine vom Fahrer eingeleitete Beschleunigung den Betrieb des Servolenkmotors zurücksetzt, um ein Servolenkmotormoment auf der Grundlage einer Fahrereingabe an das Lenkrad zum Lenken des Fahrzeugs bereitzustellen.
-
Das an das Lenkrad während des automatischen Ein-/Ausparkvorgangs angelegte Drehmoment, das die Reaktion der Steuerung auslöst, kann bei oder über einem Drehmomentschwellenwert liegen. Der automatische Ein-/Ausparkvorgang kann ein Ausparkvorgang sein.
-
Ein anderer Aspekt dieser Offenbarung richtet sich auf ein Reifen-Windup-Ausgleichssystem für ein Fahrzeug. Das System weist einen Servolenkmotor auf, der derart ausgelegt ist, dass er ein Servolenkmotormoment an Vorderräder eines Fahrzeugs liefert. Das System weist einen Lenkradmomentsensor auf. Das System weist eine mit dem Servolenkmotor und dem Lenkradmomentsensor gekoppelte Steuerung auf. Die Steuerung ist derart programmiert, dass sie als Reaktion auf ein Beenden eines Ausparkvorgangs das Servolenkmotormoment des Servolenkmotors modifiziert, so dass es im Wesentlichen dem Lenkradmoment entspricht, um ein Reifen-Windup auszugleichen.
-
Die Steuerung kann ferner derart programmiert sein, dass sie das Drehmoment des Servolenkmotors von dem Lenkradmoment auf null reduziert. Die Steuerung kann ferner derart programmiert sein, dass sie das Drehmoment des Servolenkmotors mit variierenden Raten über eine vorgegebene Zeitdauer reduziert. Die variierenden Raten weisen eine Anfangsrate und eine Endrate auf und die Anfangsrate kann eine schnellere Drehmomentreduzierung aufweisen als die Endrate. Die Steuerung kann ferner derart programmiert sein, dass sie das Drehmoment des Servolenkmotors mit einer vorgegebenen konstanten Rate reduziert. Die Steuerung kann ferner auch derart programmiert sein, dass sie das Drehmoment des Servolenkmotors aufrechterhält, bis sie einen Hinweis auf eine Fahrzeugbeschleunigung erhält.
-
Ein weiterer Aspekt dieser Offenbarung richtet sich auf ein Fahrzeug, aufweisend: ein Paar drehbare Räder, ein Lenksystem, das ein Lenkgestänge, das ein Lenkrad mit dem Paar drehbare Räder verbindet, aufweist, und eine Steuerung, die zum Steuern des Lenksystems zum Durchführen eines automatischen Ein-/Ausparkmanövers programmiert ist. Das Paar drehbare Räder weist Reifen auf, die um die Räder angeordnet sind. Das Lenksystem weist einen Lenkradmomentsensor auf, der zum Überwachen des Lenkradmoments ausgelegt ist. Das Lenksystem weist einen mit dem Lenkgestänge gekoppelten Servolenkmotor auf, der derart ausgelegt ist, dass er ein Drehmoment an das Lenksystem liefert, so dass das Paar drehbare Räder gedreht wird. Das Lenksystem weist außerdem einen Servolenkmotormomentsensor auf, der zum Überwachen des Drehmoments des Servolenkmotors ausgelegt ist.
-
Die Steuerung gemäß diesem Aspekt ist derart programmiert, dass sie, wenn sie erkennt, dass während eines automatischen Ein-/Ausparkmanövers ein Fahrer ein Drehmoment an das Lenkrad bereitstellt, das automatische Ein-/Ausparkmanöver stoppt und den Servolenkmotor derart steuert, dass er ein auf das Lenksystem wirkendes Drehmoment aufrechterhält, um ein während des automatischen Ein-/Ausparkmanövers angesammeltes Reifen-Windup auszugleichen.
-
Bei diesem Aspekt kann das automatische Ein-/Ausparkmanöver ein Ausparkvorgang sein. Die Steuerung kann ferner derart programmiert sein, dass sie ein auf das Lenksystem wirkendes Drehmoment aufrechterhält, bis das Fahrzeug beschleunigt. Die Steuerung kann außerdem derart programmiert sein, dass sie das an das Lenksystem durch den Servolenkmotor gelieferte Drehmoment mit einer kontrollierten Rate rampenartig verringert, um eine Zuckung des Lenkrads zu verhindern.
-
Die vorstehenden Aspekte dieser Offenbarung und andere Aspekte werden nachstehend unter Bezugnahme auf die beigefügten Zeichnungen ausführlicher erläutert.
-
KURZE BESCHREIBUNG DER ZEICHNUNGEN
-
- 1 ist eine Diagrammansicht eines Fahrzeuglenksystems.
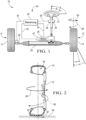
- 2 ist eine Querschnittsansicht eines Rads und eines Reifens auf einer Fahrbahnoberfläche.
- 3 ist ein Graph eines nicht erfindungsgemäßen Beispiels für eine Reifen-Windup-Steuerstrategie.
- 4 ist ein Ablaufdiagramm eines Beispiels für eine Reifen-Windup-Steuerstrategie.
-
AUSFÜHRLICHE BESCHREIBUNG
-
Die dargestellten Ausführungsformen werden unter Bezugnahme auf die Zeichnungen offenbart. Jedoch versteht es sich, dass die offenbarten Ausführungsformen lediglich Beispiele sein sollen, die in mehreren und alternativen Formen ausgeführt sein können. Die Figuren sind nicht notwendigerweise maßstabsgetreu und einige Merkmale können vergrößert oder verkleinert sein, um Einzelheiten bestimmter Komponenten darzustellen. Die offenbarten konkreten strukturellen und funktionellen Einzelheiten sind nicht als Beschränkung auszulegen, sondern als eine repräsentative Grundlage, um einen Fachmann zu lehren, wie die offenbarten Konzepte eingesetzt werden können.
-
1 zeigt ein Fahrzeug 10, das ein Paar drehbare Räder 12 aufweist. Die Räder 12 weisen Reifen 14 auf, die um sie angeordnet sind, und können auch als eine Rad- und Reifenanordnung 12 bezeichnet werden. Die Räder 12 können Vorderräder 12 am Fahrzeug 10 sein. Das Fahrzeug 10 weist außerdem ein Lenksystem 20 auf. Das Lenksystem 20 weist ein Lenkrad 22 auf, das über ein Lenkgestänge 24 in drehbarer Verbindung mit den Rädern 12 steht. Das Lenkgestänge 24 überträgt die Dreheingabe des Lenkrads 22 an die Räder 12 und umgekehrt. Das Lenkgestänge 24 kann eine Lenksäule umfassen, die vom Lenkrad 22 in ein Lenkgetriebe verläuft, das Spurstangen mit Achsschenkeln (nicht dargestellt) verbindet, an denen Naben- und Lagerbaugruppen (nicht dargestellt) befestigt sein können, um die Räder 12 mit dem Lenkrad 22 zu verbinden. Die Drehpositionen der Räder 12 sind als Laufrad-Winkelpositionen α dargestellt, und die entsprechenden Drehpositionen des Lenkrads 22 sind als Lenkrad-Winkelpositionen β dargestellt.
-
Die Winkelposition, in der das Laufrad 12 im Wesentlichen geradeaus ausgerichtet ist, wird als die Nullposition, oder als eine solche Position, in der α annäherungsweise null Grad beträgt, bezeichnet. Eine Vor-/Nachspur kann leichte Abweichungen der Winkeldrehung von der echten Nullposition bedingen, aber die Nullposition soll die Laufradposition sein, die es dem Fahrzeug ermöglicht, sich in eine im Wesentlichen geradeaus gerichtete Richtung zu bewegen. Der Drehwinkel α wird dann, von der Nullposition ausgehend, entweder mit einem positiven, einem negativen oder einem Absolutwert in Grad angegeben, da sich das Laufrad 12 in beide Richtungen von der Nullposition weg dreht.
-
Die Position, in der ein Lenkrad 22 zentriert ist, kann ebenfalls als eine Nullposition, oder eine Freisichtposition bezeichnet werden. Die Nullposition des Lenkrads 22 liegt vor, wenn der Lenkwinkel β annäherungsweise null Grad beträgt. Das Lenkrad 22 kann sich mehrere Umdrehungen an der Nullposition vorbei drehen, so dass ein positiver, ein negativer oder ein Absolutwert von 360 Grad (oder ein beliebiges ganzzahliges Vielfaches von 360 Grad) das Lenkrad 22 bei jeder Umdrehung in die Freisichtposition zurückbringt, aber die Nullposition des Lenkrads 22 ist die Lenkradposition, die mit der Nullposition der Laufräder 12 übereinstimmt (α = β = 0).
-
Das Lenkgestänge 24, insbesondere das Lenkgetriebe, kann eine mechanische Kraftverstärkung vom Lenkrad 22 an das Laufrad 12 bereitstellen. Die mechanische Kraftverstärkung des Lenkgestänges 24 ist derart, dass sich das Lenkrad 22 mehrere Umdrehungen in eine einzige Richtung drehen kann, wie vorstehend beschrieben, während sich das Rad 12 weniger als 180 Grad in eine einzige Richtung von einer maximalen Linksdrehung zu einer maximalen Rechtsdrehung, oder umgekehrt, dreht. Das Lenkgestänge 24 ist hier schematisch als ein Zahnstangengetriebe dargestellt, obwohl ein beliebiges anderes verwendet werden kann. Das Lenkgestänge 24 kann außerdem eine Lenkung mit variabler Übersetzung bereitstellen, so dass die Rate der Drehung des Rads 12 in der Nähe der Nullposition (wie z.B. an großen Schwerlastfahrzeugen) oder an den Enden des Linksdrehbereichs oder Rechtsdrehbereichs (wie z.B. an kleineren Fahrzeugen und Personenkraftwagen) erhöht oder reduziert werden kann.
-
Ein Servolenkmotor 26 kann mit dem Lenkgestänge 24 gekoppelt sein und zum Unterstützen des Drehens der Räder 12 verwendet werden. Der Servolenkmotor 26 ist derart ausgelegt, dass er ein Drehmoment an das Lenksystem bereitstellt, um die Räder 12 am Fahrzeug 10 zu drehen. Der Servolenkmotor 26 kann ein elektronischer Kraftverstärkungsmotor sein, der verwendet wird, um eine Kraftverstärkung bereitzustellen, die beim Drehen der Räder 12 hilft, wenn ein Fahrer das Lenkrad 22 dreht, oder er kann ein Motor sein, der in der Lage ist, einen automatischen Ein-/Ausparkvorgang durchzuführen, bei dem der Motor 26 die Räder 12 dreht, während das Fahrzeug einen automatischen computergesteuerten Ein-/Ausparkvorgang ohne Eingabe vom Fahrer durchführt.
-
Der Motor 26 steht mit einer Steuerung 30 in Kommunikation und wird von ihr betätigt, wie durch die Kommunikationsleitung 32 dargestellt. Anders ausgedrückt, kann die Steuerung 30 mit dem Servolenkmotor 26 über die Kommunikationsleitung 32 gekoppelt sein. Das Lenksystem 20 kann außerdem mit mehreren verschiedenen Sensoren versehen sein, um Daten an die Steuerung 30 über die Bewegung und den Zustand verschiedener Komponenten im System bereitzustellen. Ein Lenkradwinkelsensor 34 und ein Lenkradmomentsensor 36 können mit der Steuerung 30 in Kommunikation stehen, wie durch die Kommunikationsleitung 38 angezeigt. Jeder Sensor 34, 36 kann seine eigene Kommunikationsleitung aufweisen, oder sie können zu einer einzigen Kommunikationsleitung kombiniert sein. Anders ausgedrückt, kann die Steuerung 30 mit dem Lenkradwinkelsensor 34 und/oder dem Lenkradmomentsensor 36 über die Kommunikationsleitung 32 gekoppelt sein. Der Lenkradwinkelsensor 34 kann in der Lage sein, Daten hinsichtlich einer Lenkkomponentenbewegung, wie z.B. der Winkelposition β des Lenkrads 22, bereitzustellen. Der Lenkradmomentsensor 36 kann derart ausgelegt sein, dass er das Lenkradmoment überwacht und das an ein Lenkrad 22 von einem Bediener angelegte Drehmoment erfasst.
-
Ein Laufrad-Winkelsensor 40 kann mit der Steuerung 30 in Kommunikation stehen, wie durch die Kommunikationsleitung 42 angezeigt. Anders ausgedrückt, kann die Steuerung 30 mit dem Laufrad-Winkelsensor 40 über die Kommunikationsleitung 42 gekoppelt sein. Der Laufrad-Winkelsensor 40 kann mit verschiedenen Komponenten des Lenkgestänges 24 derart verbunden sein, dass er in der Lage ist, Daten bezüglich der Winkelposition α der Räder 12 bereitzustellen. Ein Servolenkmotormomentsensor 44 kann mit der Steuerung 30 in Kommunikation stehen, wie durch die Kommunikationsleitung 46 angezeigt. Anders ausgedrückt, kann die Steuerung 30 mit dem Servolenkmotormomentsensor 44 über die Kommunikationsleitung 46 gekoppelt sein. Der Servolenkmotormomentsensor 44 kann derart ausgelegt sein, dass er das an das Lenkgestänge 24 durch den Servolenkmotor 26 angelegte Drehmoment überwacht. Die Kommunikationsleitungen 32, 38, 42, 46 können fest verdrahtete Verbindungen, drahtlose Verbindung sein, können direkt zwischen der Steuerung 30 und der jeweiligen Komponente angeschlossen sein, oder sie können über andere Systeme und/oder ein Fahrzeugkommunikationssystem (nicht dargestellt), wie z.B. CAN BUS, mit der Steuerung verbunden sein.
-
2 zeigt einen Querschnitt eines Rads 12 und eines Reifens 14. Das Rad 12 ist eine halbsteife, typischerweise aus Metall gefertigte Struktur, die keine wahrnehmbare elastische Verformung bei Ein-/Ausparkvorgängen erfährt. Der Reifen 14 kann dagegen eine pneumatische aufblasbare Gummistruktur sein, die allgemein mit Druckluft 50 befüllt wird, um ein aufblasbares Polster zu bilden. Aufgrund der Konstruktion des Reifens kann der Reifen 14 wie eine Feder wirken und potentielle Energie speichern, wenn das Rad 12 gedreht wird. Der Reifen 14 weist eine Aufstandsfläche 52 auf, mit der der Reifen 14 mit dem Boden 54 in Kontakt steht.
-
Wenn das Rad 12 durch das Lenksystem 20 gedreht wird, wie durch den gestrichelten Pfeil 56 angezeigt, widerstehen die Reibungskräfte 58 zwischen der Aufstandsfläche 52 und dem Boden 54 der Drehbewegung 56. Die federartige Konstruktion des Reifens 14 ermöglicht es, dass eine elastische Verformung auftritt, und die elastische Verformung des Reifens 14 stellt eine potentielle Energie bereit, die versucht, das Laufrad 12 zurück in die entgegengesetzte Richtung umzukehren. Die potentielle Energie, die aufgrund von elastischer Verformung des Reifens 14 als Folge der Reibungskräfte 58 der Aufstandsfläche 52 mit dem Boden 54 in einem Reifen 14 erzeugt wird, ist als Reifen-Windup bekannt. Der Wunsch, dass sich das Rad 12 mittels des Reifen-Windup in die entgegengesetzte Richtung zurückdreht, ist mit der durchgezogenen Linie 60 dargestellt. Wenn das gesamte Drehmoment von dem Lenksystem 20 weggenommen wird, während ein Reifen-Windup vorliegt, können sich die Räder drehen, wie mit der durchgezogenen Linie 60 gezeigt. Mit anderen Worten kann das Rad 12 bis α gedreht werden, und dann kann sich das Rad 12 aufgrund von Reifen-Windup bis α' drehen, wenn das an das System gelieferte Drehmoment abgebaut wird. Die Drehung des Reifens von α bis α' kann das Lenkrad 22 von β bis β' drehen. Das Drehen des Lenkrads 22 von β bis β' kann sich schnell ereignen und kann als Lenkradzuckung bezeichnet werden.
-
Unter Bezugnahme auf 1 und 2 kann ein vorgegebener Laufrad-Endwinkel α erwünscht sein, wenn das Fahrzeug 10 ein automatisches Ein-/Ausparkmanöver beendet, jedoch kann sich das Rad 12 aufgrund des Reifen-Windup (der Tendenz, sich in die andere Richtung zurückzudrehen, wie mit dem gestrichelten Pfeil 60 dargestellt) von α bis α' drehen, wenn das Lenksystem 20 eine Entspannung erfährt. Die Drehung des Rads 12 von α bis α' kann das Lenkrad 22 von β bis β' drehen. Eine Lösung dieses Problems kann darin bestehen, den Servolenkmotor 26 zu verwenden, um das an das Lenkgestänge 24 wirkende Drehmoment aufrechtzuerhalten, damit der vorgegebene gewünschte Winkel α aufrechterhalten und daher der Lenkradwinkel β aufrechterhalten wird. Eine andere Lösung dieses Problems kann darin bestehen, dass der Servolenkmotor 26 verwendet wird, um das an dem Lenkgestänge 24 wirkende Drehmoment mit einer vorgegebenen Rate rampenartig herabzusetzen oder zu reduzieren. Diese Lösungen reduzieren Bedenken hinsichtlich einer Lenkradzuckung oder eines Lenkradrucks.
-
Die Steuerung 30 kann mit dem Lenkradmomentsensor 36 gekoppelt und derart programmiert sein, dass sie als Reaktion darauf, dass ein Drehmoment während eines automatischen Ein-/Ausparkvorgangs an das Lenkrad 22 angelegt wird, den automatischen Ein-/Ausparkvorgang beendet. Das zum Beenden eines automatischen Ein-/Ausparkvorgangs an das Lenkrad 22 angelegte Drehmoment kann bei oder über einem Drehmomentschwellenwert liegen, um voreiliges Beenden eines automatischen Ein-/Ausparkvorgangs zu verhindern, wie z.B. wenn das Lenkrad 22 vom Bediener leicht gezogen aber nicht vollständig ergriffen wurde.
-
Beim vorzeitigen Beenden des automatischen Ein-/Ausparkvorgangs kann das Rad 12 ein Reifen-Windup aufweisen. Daher kann die Steuerung 30 derart programmiert sein, dass sie das Lenkmoment des Servolenkmotors 26 (Servolenkmotormoment) rampenartig herabsetzt, um eine Lenkradzuckung oder einen Lenkradruck zu reduzieren. Die Steuerung 30 kann derart programmiert sein, dass sie das durch den Servolenkmotor 26 an das Lenkgestänge 24 gelieferte Drehmoment über eine eingestellte Zeitdauer rampenartig herabsetzt. Die Steuerung 30 kann derart programmiert sein, dass sie das durch den Servolenkmotor 26 an das Lenkgestänge 24 gelieferte Drehmoment mit einer eingestellten oder variierenden Rate rampenartig herabsetzt. Die Rate der rampenartigen Herabsetzung kann einstellbar sein. Alternativ kann die Steuerung 30 derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 auf einen Wert einstellt, der die Räder 12 bei dem vorliegenden Laufrad-Winkelsensor α hält, so dass sich die Räder 12 nicht drehen.
-
Die Steuerung 30 kann dann ferner auch derart programmiert sein, dass sie den Betrieb des Servolenkmotors 26 zurücksetzt, um ein Servolenkmotormoment während des Drehens des Lenkrads 22 an einen Fahrer bereitzustellen (typischer Betrieb außerhalb eines automatischen Ein-/Ausparkvorgangs). Dies kann über eine eingestellte Zeitdauer vorgenommen werden, oder die Steuerung 30 kann ferner derart programmiert sein, dass sie beim Erhalt eines Hinweises darauf, dass der Fahrer eine Beschleunigung eingeleitet hat, den Betrieb des Servolenkmotors 26 zurücksetzt, so dass er ein Servolenkmotormoment an den Fahrer bereitstellt.
-
Die Steuerung 30 kann derart programmiert sein, dass sie als Reaktion auf das Beenden eines automatischen Ein-/Ausparkmanövers das Servolenkmotormoment des Servolenkmotors 26 modifiziert, so dass es im Wesentlichen dem Lenkradmoment entspricht, um ein Reifen-Windup auszugleichen. Die Steuerung 30 kann ferner derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 von dem Lenkradmoment auf null reduziert. Die Steuerung 30 kann ferner derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 mit variierenden Raten über eine vorgegebene Zeitdauer reduziert. Die variierenden Raten können eine Anfangsrate und eine Endrate aufweisen und die Anfangsrate kann eine schnellere Drehmomentreduzierung aufweisen als die Endrate. Die Steuerung 30 kann ferner auch derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 mit einer vorgegebenen konstanten Rate reduziert. Daher kann die Rate der rampenartigen Herabsetzung des Drehmoments des Servolenkmotors 26 auf der Grundlage vieler verschiedener Kriterien einstellbar sein. Ebenfalls kann die Rate der rampenartigen Herabsetzung für ein Ende eines vollständig ausgeführten Ein-/Ausparkvorgangs von der Rate der rampenartigen Herabsetzung eines vorzeitig beendeten automatischen Ein-/Ausparkvorgangs verschieden sein. Die Rate der rampenartigen Herabsetzung kann auch für einen Einparkvorgang gegenüber einem Ausparkvorgang, oder je nachdem, ob es sich um einen Vorgang bei einer parallelen, senkrechten oder schrägen Parklücke handelte, anders sein. Die Steuerung 30 kann ferner auch derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 aufrechterhält, bis sie einen Hinweis darauf empfängt, dass ein Fahrer die Steuerung des Fahrzeugs übernommen hat, wie z.B. bei einer Fahrzeugbeschleunigung, jedoch nicht darauf beschränkt.
-
Die Steuerung 30 kann programmiert sein, um das Lenksystem 20 derart zu steuern, dass es ein automatisches Ein-/Ausparkmanöver durchführt und, wenn sie erkennt, dass ein Fahrer ein Drehmoment an das Lenkrad 22 bereitstellt, das automatische Ein-/Ausparkmanöver stoppt und den Servolenkmotor 26 derart steuert, dass er ein auf das Lenkgestänge 24 wirkendes Drehmoment aufrechterhält, um ein während des automatischen Ein-/Ausparkmanövers angesammeltes Reifen-Windup auszugleichen. Das automatische Ein-/Ausparkmanöver kann ein Einparkmanöver oder ein Ausparkmanöver sein. Die Steuerung 30 kann derart programmiert sein, dass sie das Drehmoment des Servolenkmotors 26 beim Beenden eines automatischen Ein-/Ausparkvorgangs rampenartig herabsetzt. Die Steuerung 30 kann derart programmiert sein, dass sie das auf das Lenksystem wirkende Drehmoment aufrechterhält, bis das Fahrzeug beschleunigt. Insgesamt ist die Steuerung derart programmiert, dass sie das an das Lenksystem 20 durch den Servolenkmotor 26 bereitgestellte Drehmoment aufrechterhält oder rampenartig verringert, um eine Lenkradzuckung zu verhindern. Am Ende des automatischen Ein-/Ausparkvorgangs kann die Steuerung 30 daher den Fahrer darauf hinweisen, die Steuerung des Fahrzeug zu übernehmen, und ein Reifen-Windup, das während des automatischen Ein-/Ausparkvorgangs möglicherweise angesammelt wurde, derart zu managen, dass eine Lenkradzuckung oder ein Lenkradruck gemildert wird, wenn der Fahrer die Steuerung übernimmt.
-
3 ist ein Graph eines nicht erfindungsgemäßen Beispiels für eine Reifen-Windup-Steuerstrategie während eines automatischen Ein-/Ausparkvorgangs. Während der automatische Ein-/Ausparkvorgang erfolgt, kann der Servolenkmotor 26 ein Servolenkmotormoment 70 bereitstellen, wie mit der Linie angezeigt. Das Servolenkmotormoment 70 kann durch einen Servolenkmotor 26 (1) bereitgestellt werden, und eine Steuerung 30 (1) kann einen Hinweis auf das Servolenkmotormoment 70 von einem Servolenkmotormomentsensor 44 (1) erhalten. Ein Lenkradmoment 72 kann mit der Zeit auftreten. Ein Lenkradmoment-Schwellenwert 74 kann eingestellt werden, wobei keine Änderung des normalen Betriebs des automatischen Ein-/Ausparkvorgangs erfolgen würde, bis das Lenkradmoment diesen Schwellenwert erreicht oder überschreitet, was in der Darstellung zum Zeitpunkt t1 auftritt. Zum Zeitpunkt t1 kann das Servolenkmotormoment auf null zum Zeitpunkt t2 rampenartig herabgesetzt werden. Die rampenartige Herabsetzung kann mit einer konstanten Rate erfolgen, wie hier dargestellt, oder sie kann mit verschiedenen Raten vorgenommen werden.
-
4 ist ein Ablaufdiagramm eines Beispiels für eine ähnliche Reifen-Windup-Steuerstrategie während eines automatischen Ein-/Ausparkvorgangs. Bei Schritt 80 dreht der Servolenkmotor 26 Räder an einem Fahrzeug während eines automatischen Ein-/Ausparkvorgangs. Bei der Entscheidungsraute 82 überprüft die Strategie, ob ein Lenkradmoment unter einem Schwellenwert liegt. Wenn das Lenkradmoment unter dem Schwellenwert liegt, dann kehrt der Ablauf zu Schritt 80 zurück und setzt die Schleife fort, bis der automatische Ein-/Ausparkvorgang beendet wurde. Wenn das Lenkradmoment den Schwellenwert erreicht oder überschreitet, dann fährt der Ablauf mit Schritt 84 fort, bei dem ein Servolenkmotormoment 70 rampenartig herabgesetzt wird. Der Lenkradmoment-Schwellenwert kann auf einen Wert eingestellt werden, der jenem beim leichten Ergreifen des Lenkrads von einem Bediener ähnlich ist. Die rampenartige Herabsetzung des Servolenkmotormoments kann eine Lenkradzuckung reduzieren, die aufgrund eines Reifen-Windup auftreten kann, das während des automatischen Ein-/Ausparkvorgangs möglicherweise aufgetreten ist.
-
Obwohl vorstehend Ausführungsbeispiele beschrieben wurden, ist es nicht beabsichtigt, dass diese Ausführungsformen alle möglichen Formen der offenbarten Vorrichtung und des offenbarten Verfahrens beschreiben. Vielmehr sind die in der Beschreibung verwendeten Worte beschreibende und nicht beschränkende Worte, und es versteht sich, dass verschiedene Änderungen vorgenommen werden können, ohne vom Erfindungsgedanken und Umfang der beanspruchten Offenbarung abzuweichen. Die Merkmale verschiedener Implementierungsausführungsformen können kombiniert werden, um weitere Ausführungsformen der offenbarten Konzepte zu bilden.