-
HINTERGRUND DER ERFINDUNG
-
Gebiet der Erfindung
-
Die vorliegende Erfindung bezieht sich auf eine Synchronmaschinensteuervorrichtung, die mit einer elektrischen Stromwandlereinheit versehen ist, die eine Synchronmaschine antreibt.
-
Beschreibung verwandten Stands der Technik
-
Wie bekannt ist, verursacht im Falle, bei dem eine Synchronmaschine mit einem Permanentmagneten als einem Magnetfeldmagneten durch eine Synchronmaschinensteuervorrichtung gesteuert ist, die eine Elektrikstromwandlereinheit, wie etwa einen Wechselrichter, aufweist, ein Temperaturanstieg aufgrund der Energetisierung des Ankers einer Synchronmaschine oder dergleichen ein sogenanntes Demagnetisierungsphänomen, in welchem die Intensität der Magnetisierung des Magnetfeldpermanentmagneten, das heißt der Magnetfluss reduziert ist; weiterhin, wenn die gestattete Temperatur überschritten wird, wird ein sogenanntes ”irreversibles Demagnetisierungs”-Phänomen verursacht, bei dem selbst, wenn die Temperatur auf die Normaltemperatur abfällt, der Magnetfluss nicht zu dem Zustand zur Zeit, bevor die Demagnetisierung verursacht ist, zurückkehrt.
-
Entsprechend wird verlangt, dass, wenn eine Synchronmaschine mit einem Permanentmagnet als einem Magnetfeldmagneten gesteuert wird, zumindest die Temperatur des Permanentmagneten auf einer Temperatur niedriger als die gestattete Temperatur, bei der eine irreversible Demagnetisierung verursacht wird, gehalten wird. Jedoch ist es aufgrund von Raumproblemen, welche durch die Struktur der Synchronmaschine verursacht sind, einem Gehäuse, das die Außenseite der Synchronmaschine schützt, und dergleichen schwierig, eine Temperaturdetektionsvorrichtung direkt auf dem Permanentmagneten zu montieren; desweiteren beinhalten die meisten Synchronmaschinen, die einen Permanentmagneten als einen Magnetfeldmagneten aufweisen, den Permanentmagneten an einer Position, die innerhalb des Permanentmagneten und in der Umgebung des Rotors ist, was in einem weiteren großen Hindernisfaktor gegen die Montage der Temperaturdetektionsvorrichtung resultiert. Entsprechend wird eine Technologie für indirekte Messung oder Abschätzung, mit einer gewissen Art von Verfahren, der Temperatur des Permanentmagneten oder des sich auf die Temperatur des Permanentmagneten beziehenden Magnetflusses verlangt.
-
Als ein Beispiel einer Synchronmaschinensteuervorrichtung, die diese Probleme löst, gibt es eine konventionelle Vorrichtung (man beziehe sich beispielsweise auf Patentdokument 1), in der basierend auf Informationsobjekten zum Strom, der Temperatur und der Drehzahl, die aus einem Stromsensor, der den Strom detektiert, der zwischen dem Wechselrichter und der Ankerwicklung auszutauschen ist, einem Temperatursensor, der die Temperatur der Ankerwicklung detektiert, um so den Widerstandswert der Ankerwicklung zu korrigieren, bzw. einem Magnetpol-Positionssensor, der die Magnetpolposition des Magnetfeldmagneten detektiert, detektiert werden, der Wert des Magnetflusses, der aus dem Magnetfeld-Permanentmagneten entweicht und mit der Ankerwicklung verlinkt ist, durch einen Magnetfeldbeobachter (Observer) erhalten wird, der aus einem Modell der Synchronmaschine (elektrische Drehmaschine) und einem Verhältnisintegrator besteht.
-
Als ein anderes Beispiel einer ähnlichen Steuervorrichtung gibt es eine konventionelle Vorrichtung (siehe beispielsweise Patentdokument 2) mit einer Magnettemperaturschätzeinheit, in welcher bei Energetisierung der Ankerwicklung (Statorwicklung) Kennfelddaten entsprechend einer Batteriezwischenanschlussspannung, die aus einem Spannungsdetektor ausgegeben wird, zuerst aus entsprechenden Kennfelddatenobjekten für die zwei oder mehr Stromquellenspannungen ausgewählt werden, die in einem Referenzmagnetstromkennfeld gespeichert sind, Kartendatenobjekten entsprechend dem durch eine Drehmomentsensor detektierten Drehmoment, der aus einer Winkelberechnungseinheit ausgegebenen Drehzahl und einem q-Achsenstrom (der einen Magnetfeldstrom in der vorliegenden Erfindung, der später beschrieben wird, bezeichnet) aus den entsprechenden Kennfelddatenobjekten für zwei oder mehr vorgegebenen Referenzmagnettemperaturen, die in den ausgewählten Kennfelddaten enthalten sind, ausgewählt werden, und dann die vorbestimmte Referenzmagnettemperatur entsprechend den ausgewählten Kennfelddatenobjekten als ein Magnettemperaturschätzwert eingestellt wird.
-
Als ein anderes Beispiel einer ähnlichen Steuervorrichtung existiert eine konventionelle Vorrichtung (siehe beispielsweise Patentdokument 3), in der basierend auf der Drehzahl einer Synchronmaschine, dem Basiswellenstrom oder dem Befehlswert dafür und dem harmonische Spannungsbefehlswert mit einer Frequenz, die ganzzahlig mehrfach so hoch wie die Basiswellenfrequenz ist, der Magnetfluss, der durch den Permanentmagneten der Synchronmaschine erzeugt wird und mit dem Anker verknüpft ist (ankerverknüpfter Magnetfluss) berechnet wird und unter Bezugnahme auf eine Tabelle für Permanentmagnettemperatur versus ankerverknüpfter Magnetfluss, die Permanentmagnettemperatur für den berechneten Wert des ankerverknüpften Magnetflusses geschätzt wird.
-
Weiterhin existiert als ein anderes Beispiel einer ähnlichen Steuervorrichtung eine konventionelle Vorrichtung (siehe beispielsweise Patentdokument 4), die einen Spannungsdetektor, der die Eingangsspannung an einen Permanentmagnettypsynchronmotor detektiert, einen Spannungskomponentenwandler, der die q-Achsenspannung aus der Ausgabe des Spannungsdetektors extrahiert, einen Drehzahldetektor, der die Drehzahl detektiert, und eine Temperaturschätzvorrichtung, die den Primärwiderstand des Permanentmagnettypsynchronmotors in einer Einstellspeichereinheit einstellt und speichert und welche eine Temperaturänderung im Permanentmagnettypsynchronmotor basierend auf dem d-Achsenstrom, dem q-Achsenstrom, der q-Achsenspannung, der Drehzahl, dem Primärwiderstand in der Einstellspeichereinheit und dem Magnetfluss abschätzt, aufweist.
-
Jedes der Patentdokumente 5 und 6 offenbart ein Beispiel einer Technologie, in der basierend auf einem Spannungsbefehl für eine Synchronmaschine und einem Ankerstrom die Rotationsposition der Synchronmaschine über eine Berechnung abgeschätzt wird.
-
Referenzen des Stands der Technik
-
(Patentdokumente)
-
- Patentdokument 1: Japanische Patentoffenlegungsschrift Nr. 2010-110141
- Patentdokument 2: Japanisches Patent Nr. 4652176
- Patentdokument 3: Japanische Patentoffenlegungsschrift Nr. 2003-235286
- Patentdokument 4: Japanisches Patent Nr. 4548886
- Patentdokument 5: Japanisches Patent Nr. 4672236
- Patentdokument 6: Internationale Publikation Nr. WO2010/109528
-
Wenn der Magnetflussbeobachter den Wert des Magnetflusses, der dem Magnetfeld-Permanentmagneten entweicht, und der mit der Ankerwicklung verknüpft ist, erhält, wird in der in Patentdokument 1 offenbarten konventionellen Technologie der Widerstandswert der Ankerwicklung, korrigiert basierend auf der Ausgabe eines Temperatursensors, der die Temperatur der Ankerwicklung detektiert, verwendet; daher ist ein Temperatursensor zum Detektieren der Temperatur der Ankerwicklung erforderlich, wobei sich das Problem stellt, dass die Anzahl von Baukomponenten in der Steuervorrichtung sicher steigt.
-
In der im Patentdokument 2 offenbarten konventionellen Vorrichtung wird eine große Anzahl von Kennfelddatenobjekten zum Abschätzen der Magnettemperatur durch Messen einer großen Anzahl von Parametern erzeugt, einschließlich des Drehmoments, der Drehzahl, und der Stromquellenspannung, während die Magnettemperatur sich ändert; somit stellt sich das Problem, dass viel Arbeit zum Erzeugen dieser Kennfelddatenobjekte erforderlich ist.
-
In der im Patentdokument 3 offenbarten konventionellen Vorrichtung wird ein Oberschwingungsstrom, der ursprünglich nicht zum Antreiben einer Synchronmaschine erforderlich ist und eine Frequenz aufweist, die ein ganzzahliges Mehrfaches so hoch wie die Basiswellenfrequenz der Basiswellenkomponente ist, aufweist, gesteuert; daher stellt sich das Problem, dass dieser Oberschwingungsstrom einen Effekt auf die Steuerleistungsfähigkeit der Synchronmaschine hat.
-
In der in Patentdokument 4 offenbarten konventionellen Vorrichtung ist, weil in diesem Verfahren eine Spannungskomponente einen ernsthaften Effekt hat, ein Spannungsdetektor erforderlich; somit stellt sich das Problem, dass die Anzahl von Bestandteilskomponenten in der Steuervorrichtung ansteigt. Darüber hinaus wird in Patentdokument 4 gesagt, dass die Eingangsspannung an die Synchronmaschine geschätzt wird; jedoch sind Details des Schätzverfahrens nicht offenbart.
-
ZUSAMMENFASSUNG DER ERFINDUNG
-
Die vorliegende Erfindung ist implementiert worden, um die vorstehenden Probleme bei konventionellen Synchronmaschinensteuervorrichtungen zu lösen; ihre Aufgabe ist es, eine Synchronmaschinensteuervorrichtung bereitzustellen, die mit hoher Genauigkeit die Temperatur eines Permanentmagneten oder einen Magnetflusswert schätzen kann, während die Synchronmaschine, die den Magnetfeld-Permanentmagneten aufweist, angetrieben wird, ohne dass ein Temperaturdetektor direkt auf dem Permanentmagneten montiert wird.
-
Die Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung beinhaltet eine elektrische Stromwandlereinheit, die eine Spannung an eine Synchronmaschine 1 mit einem Permanentmagneten zum Ausbilden eines Magnetfelds ausgibt, basierend auf einem Spannungsbefehl; eine Stromdetektionseinheit, die einen Ankerstrom der Synchronmaschine detektiert; eine Spannungsbefehlsberechnungseinheit, die den Spannungsbefehl basierend auf einem Steuerbefehl berechnet; eine Positionsdetektionseinheit, die eine Rotorposition der Synchronmaschine schätzt oder detektiert; eine Magnetfluss-Schätzvorrichtung, die eine γ-Achse, in der ein Gesamt-Ankerverbundener Magnetfluss der Synchronmaschine erzeugt wird, abschätzt, basierend auf dem Ankerstrom und/oder dem Spannungsbefehl; und eine Magnetbedingungsschätzeinheit, welche die Temperatur oder den Magnetfluss des Permanentmagneten schätzt.
-
Die Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Magnetbedingungsschätzeinheit den Ankerstrom in Ströme auf der γ-δ-Achse, die aus der γ-Achse und einer δ-Achse rechtwinklig zur γ-Achse besteht, Koordinaten-wandelt, basierend auf der Rotorposition und der geschätzten γ-Achse und die Temperatur oder den Magnetfluss des Permanentmagneten basierend auf dem Steuerbefehl und den γ-δ-Achsenströmen schätzt.
-
Die Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung macht es möglich, eine Synchronmaschine anzutreiben, während mit weniger Kennfelddaten eine Hochgenauigkeitspermanentmagnettemperatur oder ein Magnetfluss, die für die Spannungsausgabegenauigkeit der elektrischen Stromwandlereinheit unempfindlich ist, abzuschätzen, ohne eine Temperaturdetektionsvorrichtung direkt auf den Permanentmagneten zu montieren.
-
Die vorstehende und andere Aufgaben, Merkmale, Aspekte und Vorteile der Erfindung werden aus der nachfolgenden detaillierten Beschreibung der vorliegenden Erfindung bei Zusammenschau mit den beigefügten Zeichnungen ersichtlicher.
-
KURZE BESCHREIBUNG DER ZEICHNUNGEN
-
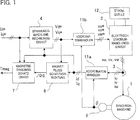
1 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert;
-
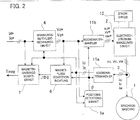
2 ist ein Systemkonfigurationsdiagramm, das ein Variantenbeispiel einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert;
-
3 ist ein Vektordiagramm einer Synchronmaschine, die einen Magnetfeld-Permanentmagneten aufweist;
-
4 ist ein Blockdiagramm, das ein Beispiel der Konfiguration einer Magnetbedingungsschätzeinheit in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 der vorliegenden Erfindung illustriert;
-
5 ist ein Satz von Charakteristikgraphen zum Erläutern der Beziehung zwischen der Temperatur eines Permanentmagneten und dem Strom Iγ oder Iδ auf der γ-δ-Achse unter einer vorgegebenen d-q-Achsenstrombefehlsbedingung;
-
6 ist ein Satz erläuternder Diagramme, welche die Differenz zwischen einem Vektordiagramm bei einer Referenzbedingung und einem Vektordiagramm zu einer Zeit, wenn die Demagnetisierung unter einer gegebenen Bedingung des d-q-Achsenstrombefehls verursacht wird, repräsentiert, in einem Vektordiagramm einer Synchronmaschine, die einen Magnetfeld-Permanentmagneten aufweist;
-
7 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert;
-
8 ist ein Systemdiagramm, das ein Beispiel der Konfiguration einer Spannungsbefehlsberechnungseinheit in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung illustriert;
-
9 ist ein Blockdiagramm, das ein Beispiel einer Konfiguration einer Magnetbedingungsschätzeinheit in einem Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung illustriert;
-
10 ist ein Charakteristikgraph zum Erläutern der Beziehung zwischen der Temperatur eines Permanentmagneten und dem γ-Achsenstrom Iγ bei vorgegebenen Bedingungen des Gesamtankerverknüpfungsmagnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ*;
-
11 ist ein Satz erläuternder Diagramme, welche den Unterschied zwischen einem Vektordiagramm bei der Referenzbedingung und einem Vektordiagramm zu einer Zeit, wenn die Demagnetisierung unter gegebenen Bedingungen des Gesamtankerverknüpfungsmagnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ* verursacht wird, in einem Vektordiagramm einer Synchronmaschine, die einen Magnetfeld-Permanentmagneten aufweist, repräsentiert;
-
12 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert;
-
13 ist ein Systemkonfigurationsdiagramm, das ein Variantenbeispiel der Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert;
-
14 ist ein Konfigurationsdiagramm, das ein Beispiel der Steuerbefehlserzeugungsvorrichtung in 13 illustriert;
-
15 ist ein Konzeptdiagramm zum Erläutern der Beziehung zwischen dem δ-Achsenstrombefehl Iδ* und dem Magnetflussbefehl Φ* in der Magnetflussbefehlserzeugungsvorrichtung in 14;
-
16 ist ein Blockdiagramm, das ein anderes Konfigurationsbeispiel einer Steuerbefehlserzeugungsvorrichtung in 13 illustriert;
-
17 ist ein Konzeptdiagramm zum Erläutern der Beziehung zwischen dem Drehmomentbefehl τ0* und dem Magnetflussbefehl Φ* in der Magnetflussbefehlserzeugungsvorrichtung in 16;
-
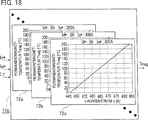
18 ist ein Satz von Konfigurationsdiagrammen, die ein Beispiel der Konfiguration einer Magnettemperaturschätzvorrichtung in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung repräsentiert;
-
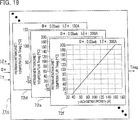
19 ist ein Satz von Konfigurationsdiagrammen, die ein anderes Beispiel einer Magnettemperaturschätzvorrichtung in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung repräsentiert;
-
20 ist ein erläuterndes Diagramm, das ein Beispiel repäsentiert, in dem eine Steuerbefehlsbedingung zum Bereitstellen eines Kennfeldes oder einer Gleichung, welche die Korrelation zwischen dem γ-δ-Achsenstrom und der Permanentmagnettemperatur (Magnetfluss) in einer Magnetbedingungsreferenzeinheit einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung gezeigt wird;
-
21 ist ein erläuterndes Diagramm, das eine Geschwindigkeitszone zum Abätzen der Permanentmagnettemperatur (Magnetfluss) in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung repräsentiert;
-
22 ist ein Vektordiagramm einer Zeit, wenn eine Synchronmaschine, die ein Magnetfeld-Permanentmagnet aufweist, nicht energetisiert wird, in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 5 der vorliegenden Erfindung;
-
23 ist ein Satz von Vektorgdiagrammen zu einer Zeit, wenn der δ-Achsenstrom auf Null gesteuert ist, in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 6 der vorliegenden Erfindung; und
-
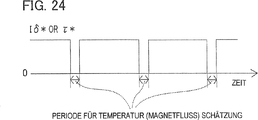
24 ist ein Timing-Diagramm, das ein Beispiel des Betriebstimings zum Abschätzen des δ-Achsenstrombefehls Iδ* oder des Drehmomentbefehls τ* und der Permanentmagnettemperatur oder des Magnetfluss in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 6 der vorliegenden Erfindung repräsentiert.
-
DETAILLIERTE BESCHREIBUNG BEVORZUGTER AUSFÜHRUNGSFORMEN
-
Ausführungsform 1
-
Nachfolgend wird die Konfiguration einer Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung und die Funktionen von konstituierenden Elementen erläutert. 1 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung illustriert, zusammen mit einer Synchronmaschine. Eine Synchronmaschine 1 gemäß der vorliegenden Erfindung hat einen Magnetfeld-Permanentmagneten.
-
Zuerst wird in Bezug auf die Konfiguration einer Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung, die für den Antrieb einer Synchronmaschine notwendig ist, der Fluss von der Ausgabeseite einer elektrischen Stromwandlungseinheit zur Eingabeseite derselben, wo ein Spannungsbefehl erzeugt wird, erläutert. In 1 wird die einen Magnetfeld-Permanentmagneten aufweisende Synchronmaschine 1 durch eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 der vorliegenden Erfindung gesteuert. Die Synchronmaschinensteuervorrichtung ist mit einer elektrischen Stromwandlungseinheit 2 versehen, deren Eingang und Ausgang mit einer Stromquelle 12 bzw. der Ankerwicklung der Synchronmaschine 1 verbunden ist, eine Stromdetektionseinheit 3, die den Ankerstrom der Synchronmaschine 1 detektiert, eine Spannungsbefehlsberechnungseinheit 4, eine Positionsdetektionseinheit 5, eine Magnetflussschätzeinheit 6, eine Magnetbedingungsschätzeinheit 7, einen ersten Koordinatenwandler 11a und einen zweiten Koordinatenwandler 11b.
-
Die Stromquelle 12 ist aus einer Stromversorgungseinheit oder einer Batterie gebildet, die eine Gleichspannung ausgibt. Das Konzept der Stromquelle 12 beinhaltet eine Vorrichtung, die eine Gleichspannung aus einer Einzelphasen- oder Dreiphasen-Wechselstromquelle unter Verwendung eines bekannten Gleichrichters erhält. Die elektrische Stromwandlungseinheit 2 beinhaltet einen über ein bekanntes PWM-(Pulsweitenmodulation)Verfahren gesteuerten Wechselrichter, wandelt aus der Stromquelle 12, die mit der Eingabe derselben verbunden ist, zugeführten elektrischen Gleichstrom in einen elektrischen Mehrphasenwechselstrom um und liefert den elektrischen Mehrphasenwechselstrom an die Ankerwicklung der Synchronmaschine 1. Detaillierter erzeugt die elektrische Stromwandlungseinheit 2 eine Mehrphasenwechselspannung, basierend auf einem Spannungsbefehl, der aus der später beschriebenen Spannungsbefehlsberechnungseinheit 4 erhalten wird, oder um genau zu sein, basierend auf einem Mehrphasenwechselspannungbefehl, der durch Anwenden von Koordinatentransformation auf einen aus der Spannungsbefehlsberechnungseinheit 4 ausgegebenen Spannungsbefehl erhalten wird, und legt die Mehrphasenwechselspannung an die Ankerwicklung der Synchronmaschine 1 an, um so die Synchronmaschine 1 anzutreiben. Als Ergebnis wird ein Ausgabestrom in der Ankerwicklung der Synchronmaschine 1 erzeugt. Nachfolgend wird der erzeugte Ausgabestrom als ein ”Ankerstrom” ausgedrückt werden.
-
Ein Ankerstrom, welches der Ausgabestrom der Synchronmaschine 1 ist, wird durch die Stromdetektionseinheit 3, die aus einem Stromsensor oder dergleichen gebildet ist, detektiert. In dem Fall, bei dem die Synchronmaschine 1 eine Dreiphasensynchronelektrorotationsmaschine ist, kann die Stromdetektionseinheit 3 auf solche Weise konfiguriert sein, dass alle Ankerströme von drei Phasen, das heißt iu, iv und iw, der Synchronmaschine 1 detektiert werden; alternativ kann die Stromdetektionseinheit 3 in solcher Weise konfiguriert sein, dass die Ankerströme von zwei Phasen so detektiert werden, dass der Ankerstrom einer Phase, beispielsweise der Ankerstrom der w-Phase iw, über die Beziehung [iw = –iu – iv] durch Verwendung der detektierten anderen Ankerströme der zwei Phasen iu und iv erhalten wird. Die Stromdetektor 3 kann unter Verwendung bekannter Technologie gebildet sein, in welcher der Ankerstrom aus einem Gleichstromverbindungsstrom detektiert wird, der aus der Stromquelle 12 zur elektrischen Stromwandlungseinheit 2 fließt, statt durch einen Stromsensor oder dergleichen gebildet zu werden, der direkt den Ankerstrom jeder Phase der Synchronmaschine 1 detektiert.
-
Die Positionsdetektionseinheit 5 wird aus einem bekannten Drehgeber, Encoder oder dergleichen gebildet und detektiert die Position θ des Ankers der Synchronmaschine 1. Hier bezeichnet die Position θ des Ankers der Synchronmaschine 1 den N-Pol-Richtungswinkel eines Permanentmagneten, der das Magnetfeld bildet, in Bezug auf eine Achse, die eingestellt wird, indem die Ankerwicklung der u-Phase als eine Referenz betrachtet wird; im Allgemeinen wird die d-Achse eines rotierenden Biaxial-Koordinatensystems (nachfolgend ausgedrückt als ”d-q-Achse”), die bei der Drehzahl (elektrische Winkelfrequenz ω) der Synchronmaschine 1 rotiert, längs der N-Polrichtung des vorstehenden Permanentmagneten eingestellt und wird eine q-Achse desselben längs einer rechtwinkligen Richtung, die gegenüber der d-Achse um 90° vorgerückt ist, eingestellt. Dies gilt für die nachfolgende Erläuterung.
-
2 ist ein Systemkonfigurationsdiagramm, das ein Variantenbeispiel einer Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung illustriert, zusammen mit einer Synchronmaschine. Die vorstehende Positionsdetektionseinheit 5 in 1 wird in dem Fall eingesetzt, bei dem die Position O des Ankers der Synchronmaschine 1 unter Verwendung eines bekannten Drehgebers oder Encoders detektiert wird; jedoch ist die in 2 illustrierte Synchronmaschinensteuervorrichtung mit einer Positionsdetektionseinheit 5a versehen, die einen geeigneten, bekannten Beobachter oder dergleichen einsetzt und die Rotorposition θ über eine Berechnung schätzt, basierend auf einem Spannungsbefehl, einem Ankerstrom und dergleichen. Die Konfiguration der Positionsdetektionseinheit 5a kann durch die im Patentdokument 5 oder 6 beschriebenen Konfiguration implementiert werden; daher wird deren Erläuterung in Ausführungsform 1 weggelassen. Die Differenz zwischen 1 und 2 liegt darin, welche der Positionsdetektionseinheit 5 und 5a vorgesehen ist; die anderen Konfigurationen sind zueinander identisch.
-
Ein Koordinatenwandler 11a konvertiert die Ankerströme iu, iv und iw der Synchronmaschine 1 in Ströme Id und Iq auf der d-q-Achse über eine Berechnung anhand der Gleichung (1) unten, basierend auf der Rotorposition θ.
-
-
Die Spannungsbefehlsberechnungseinheit
4 gibt Spannungsbefehle Vd* und Vq* auf der d-q-Achse aus, um so die Ströme Id und Iq auf der d-q-Achse zu gewünschten Steuerbefehlen (in Ausführungsform 1 Strombefehle Ie* und Iq*) koinzident zu machen. In dem Fall, wo eine Stromrückkopplungssteuerung durchgeführt wird, basierend auf den entsprechenden Differenzen zwischen den Strombefehlen Id* und Iq* auf der d-q-Achse und den Strömen Id und Iq auf der d-q-Achse, führt die Spannungsbefehlsberechnungseinheit
4 eine Proportionalintegralsteuerung (PI-Steuerung) gemäß Gleichung (2) unten durch, um so die Spannungsbefehle (Stromrückkopplungssteuerbefehle) Vd* und Vq* auf der d-q-Achse zu erzeugen.
wobei Kpd eine Stromsteuer-d-Achsen-Proportionalverstärkung ist, Kid eine Stromsteuer-d-Achsen-Integralverstärkung ist, Kpq eine Stromsteuer-q-Achsen-Proportionalverstärkung ist, Kiq eine Stromsteuer-q-Achsen-Integralverstärkung ist und s ein Laplace-Operator ist. Der Kehrwert des Laplace-Operators s bezeichnet einmalige Zeitintegration.
-
Jedoch kann beispielsweise im Fall, bei dem wie wenn Hochgeschwindigkeitsantrieb durchgeführt wird, das Verhältnis der Trägerfrequenz der elektrischen Stromwandlungseinheit 2, wie etwa ein bekannter PWM-Steuer-Wechselrichter, zur Drehzahl (elektrische Winkelfrequenz) ω der Synchronmaschine 1 klein ist, das heißt wenn die Anzahl von Schaltaktionen durch die Schaltvorrichtung in der elektrischen Stromwandlungseinheit 2 in einem Zyklus einer an jede Phase der Synchronmaschine 1 angelegten Wechselspannung klein wird, der Spannungsbefehl, der erforderlich ist, um den Strom der Synchronmaschine 1 dazu zu bringen, einem gewünschten Strombefehl zu folgen, nicht aktualisiert werden, wodurch es schwierig wird, eine Stromrückkopplungssteuerung durchzuführen. In solch einem Fall ist es nur notwendig, eine Spannungsvorsteuerung durchzuführen. Um die Spannungsvorsteuerung durchzuführen, ist es notwendig, die Drehzahl ω, die in unillustriert ist, als die Eingabe der Spannungsbefehlsberechnungseinheit 4 weder in 1 noch 2 an der Spannungsbefehlsberechnungseinheit 4 einzugeben. Die Drehzahl ω kann durch Durchführen einer Differentialoperation unter Verwendung der Rotorposition θ erhalten werden, die durch die Positionsdetektionseinheit 5 oder 5a detektiert wird.
-
Im Falle, bei dem eine Spannungsvorsteuerung durchgeführt wird, werden die Spannungsbefehle auf der d-q-Achse (Spannungsvorsteuerbefehle) Vd* und Vq* über die Gleichung (3) unten erzeugt, basierend auf den Strombefehlen Id* und Iq* auf der d-q-Achse, der Drehzahl ω und dem Permanentmagnet-Magnetfluss Φm.
wobei Ld die d-Achsenrichtungsinduktion (nachfolgend als d-Achseninduktion ausgedrückt) ist, Lq die q-Achsenrichtungsinduktion (nachfolgend als q-Achseninduktion ausgedrückt) ist, und R der Widerstand ist (bestehend hauptsächlich aus dem Widerstand der Ankerwicklung der Synchronmaschine
1; jedoch wird im Fall, bei dem der Effekt des Widerstandes des Drahtanschlusses zwischen der Synchronmaschine
1 und der elektrischen Stromwandlungseinheit
2 beachtlich groß ist, auch der Widerstand des Verdrahtungsanschlusses berücksichtigt) ist.
-
Es kann gestattet sein, dass es zum Zeitpunkt, wenn der Antrieb gestartet wird, der Permanentmagnet-Magnetfluss Φm in der Gleichung (3) auf einen vorgegebenen Wert wie etwa einen Referenzwert eingestellt wird und dann rekursiv und sequentiell mit dem Permanentmagnet-Magnetfluss-Schätzwert Φmag als einem neuen Φm aktualisiert wird, der durch Einsetzen der Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung erhalten werden kann.
-
In der Gleichung (3) sind alle in der Berechnung eingesetzten d-q-Achsenströme Id* und Iq*; jedoch können statt dieser Ströme die Ströme Id und Iq auf der d-q-Achse oder der Durchschnittswert von Id* und Id und der Durchschnittswert von Id* und Iq eingesetzt werden.
-
Es kann gestattet sein, dass im Normalmodus nur Stromrückkopplungssteuerung oder sowohl Stromrückkopplungssteuerung als auch Spannungsvorsteuerung durchgeführt werden, und unter eine Fahrbedingung, bei der Stromrückkopplungssteuerung schwierig durchzuführen ist, wird eine Stromrückkopplungssteuerung negiert und wird nur eine Spannungsvorsteuerung durchgeführt.
-
Die Spannungsbefehle Vd* und Vq* auf der d-q-Achse, die aus der Spannungsbefehlsberechnungseinheit 4 ausgegeben sind, werden durch den Koordinatenwandler 11b in die Spannungsbefehle vu*, vv* und vw* umgewandelt, über die Gleichung (4) unten und basierend auf der Rotorposition θ, und werden an die elektrische Stromwandlungseinheit 2 ausgegeben.
-
-
In dieser Hinsicht kann es jedoch gestattet sein, unter Berücksichtigung, dass in Gleichung (4) die Steuerberechnungsverzögerungszeit (Abfallzeit) bis die Steuerberechnung basierend auf den Ankerströmen iu, iv und iw, die durch die Stromdetektionseinheit 3 detektiert sind, an den Spannungen vu, vv und vw, die aus der elektrischen Stromwandlungseinheit 2 ausgegeben werden, reflektiert ist, dass die Koordinatenumwandlung mit einer Phase durchgeführt wird, die durch Korrigieren der Rotorposition θ um einen Phasenkorrekturbetrag Δθd1 erhalten wird, basierend auf der Steuerberechnungsverzögerungszeit.
-
Wie oben beschrieben, legt die elektrische Stromwandlungseinheit 2 die Spannungen vu, vv und vw an die Synchronmaschine 1 an, basierend auf den Spannungsbefehlen vu*, vv* und vw*, über ein bekanntes PWM-Steuerverfahren und dergleichen.
-
Was vorstehend beschrieben worden ist, ist die Konfiguration der Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung, die für den Antrieb der Synchronmaschine 1 erforderlich ist. Als Nächstes wird die Magnetflussschätzeinheit 6 und die Magnetbedingungsschätzeinheit 7 erläutert, welche die Konfigurationen zum Abschätzen der Temperatur oder des Magnetflussbetrags des Magnetfeld-Permanentmagneten der Synchronmaschine 1 sind, welche Merkmale der Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung sind.
-
Die Magnetflussschätzeinheit 6 schätzt die γ-Achse, in welcher der Gesamtankerverknüpfungsmagnetfluss Φ erzeugt wird, basierend zumindest auf den Spannungsbefehlen Vd* und Vq* auf der d-q-Achse; spezifisch schätzt die Magnetflussschätzeinheit 6 den Winkel ∠Φ0 zwischen der d-Achse und der Richtung des geschätzten Gesamtankerverknüpfungsmagnetflusses Φ ab. Der Gesamtankerverknüpfungsmagnetfluss Φ bezeichnet das kombinierte Magnetfeld des magnetischen Flusses (bezeichnet nachfolgend als Permanentmagnet-Magnetfluss) Φm, der durch den vorstehenden Permanentmagneten erzeugt wird, und des Magnetflusses (Ankerreaktionmagnetflus) Φa, der durch den vorstehenden Ankerstrom erzeugt wird; in Ausführungsform 1 der Erfindung wird die Richtung, die rechtwinklig zu (90° vorgerückt gegenüber) der vorstehenden γ-Achse ist, als δ-Achse bezeichnet werden.
-
3 ist ein Vektordiagramm einer Synchronmaschine, die einen Magnetfeld-Permanentmagneten aufweist; die Beziehung zwischen der γ-δ-Achse und dem Winkel ∠Φ0 zwischen der d-Achse und der Richtung des Gesamtankerverknüpfungsmagnetflusses Φ und dergleichen sind repräsentiert. Als ein optimales Verfahren zum Berechnen des Winkels ∠Φ0 über die Gleichung (5), die ein Satz von Gleichungen ist, welche die Beziehung zwischen dem Strom Id auf der d-q-Achse und der d-Achsenkomponente Φd des Gesamtankerverknüpfungsmagnetflusses Φ und die Beziehung zwischen dem Strom Iq auf der d-q-Achse und der q-Achsenkomponente Φq des Gesamtankerverknüpfungsmagnetflusses Φ repräsentiert, werden Φd und Φq erhalten und dann wird der Winkel ∠Φ0 aus den erhaltenen Φd und Φq berechnet, basierend auf der Gleichung (6) unten.
-
-
Es ist bekannt, dass aufgrund der magnetischen Sättigung die Werte der auf der Gleichung (5) basierenden Berechnung eingesetzten d-q-Achseninduktionen Ld und Lq sich abhängig vom Ankerstrom ändern; es kann gestattet sein, dass beispielsweise die Beziehungen zwischen dem Strom Id auf der d-q-Achse und der d-q-Achseninduktion Ld und den Beziehungen zwischen dem Strom Iq auf der d-q-Achse und der d-q-Achseninduktion Lq als Gleichungen oder in einer Tabelle gespeichert sind und gemäß dem Strom so geändert werden, dass der Fehler bei der Abschätzung des Magnetflusses aufgrund der Änderung in der Induktion reduziert werden kann.
-
Der Permanentmagnet-Magnetfluss Φm ändert sich mit Temperaturänderung; somit wird zu einer Zeit, wenn der Antrieb gestartet wird, der Permanentmagnet-Magnetfluss Φm auf einen vorgegebenen Wert eingestellt, wie etwa einen Referenzwert und wird dann rekursiv und sequentiell mit dem Permanentmagnet-Magnetfluss-Schätzwert Φmag als neuem Permanentmagnet-Magnetfluss Φm aktualisiert, der erhalten werden kann, indem die Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung in Wirkung gebracht wird.
-
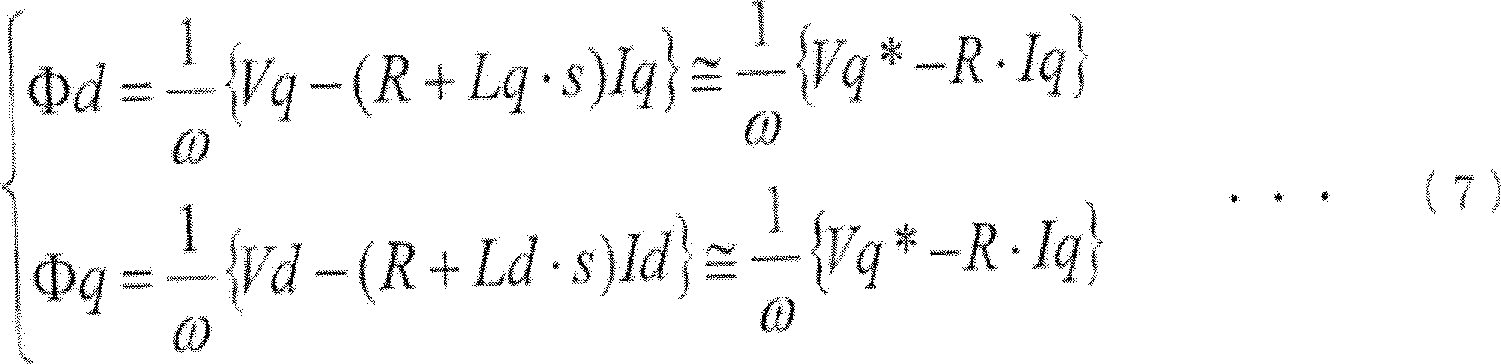
Als ein anderes Optimum-Verfahren zur Berechnung des Winkels ∠Φ0 werden durch Gleichung (7), die ein Satz von Gleichungen ist, welche die Beziehung zwischen der Spannung Vd, auf der d-q-Achse und der d-Achsenkomponente Φd des Gesamtankerverbindungs-Magnetflusses Φ und die Beziehung zwischen der Spannung Vq auf der d-q-Achse und der q-Achsenkomponente Φq des Gesamtankerverbindungs-Magnetflusses Φ repräsentiert, Φd und Φq erhalten und dann wird der Winkel ∠Φ0 aus den erhaltenen Φd und Φq berechnet, basierend auf der vorstehenden Gleichung (6).
-
-
Jedoch sind in jeder der Konfigurationen in den 1 und 2 gemäß der ersten Ausführungsform der vorliegenden Erfindung die Werte der Spannungen Vd und Vq auf der d-q-Achse unbekannt; somit werden statt der Spannung Vd und Vq auf der d-q-Achse die Spannungsbefehle Vd* und Vq* auf der d-q-Achse eingesetzt. In dieser Situation sind zu einer Zeit, wenn der Antrieb der Synchronmaschine 1 gestartet wird, die Spannungsbefehle Vd* und Vq* auf der d-q-Achse ”0” und daher sind Φd und Φq ”0”, daher wird der Anfangswert der d-Achsenkomponente Φd des Gesamtankerverbindungs-Magnetflusses Φ zu einer Zeit, wenn der Antrieb der Synchronmaschine 1 gestartet ist, auf einen vorbestimmten Permanentmagnet-Magnetfluss Φm wie etwa einen Referenzwert eingestellt.
-
Es ist notwendig, die Drehzahl ω, die nicht illustriert ist, als die Eingabe an die Magnetflussschätzeinheit 6, weder in 1 noch in 2, an die Magnetflussschätzeinheit 6 einzugeben; daher wird die Drehzahl ω durch Durchführen einer Differentialoperation unter Verwendung der Rotorposition θ, die durch die Positionsdetektionseinheit 5 oder 5a detektiert ist, erhalten. In der Gleichung (7) kann es gestattet sein, anzunehmend, dass sich der Strom graduell ändert, dass der den Laplace-Operator s enthaltende Term vernachlässigt wird.
-
Soweit der Widerstand R betroffen ist, weil der Widerstandswert sich abhängig von der Temperatur der Synchronmaschine 1 ändert, kann es gestattet sein, den Wert des Widerstands R durch Detektieren der Temperatur der Synchronmaschine 1 zu korrigieren; weiterhin kann es in dem Fall, bei dem die sich auf den Widerstand R beziehenden Terme kleiner als die anderen Terme sind, gestattet sein, dass die den Widerstand R enthaltenden Terme vernachlässigt werden und Informationen zum Ankerstrom der Synchronmaschine 1 in der Berechnung des Winkels ∠Φ0 nicht eingesetzt wird, wo dass die Berechnung vereinfacht wird.
-
4 ist ein Systemkonfigurationsdiagramm, das ein Beispiel der Konfiguration einer Magnetbedingungsschätzeinheit in einer Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung illustriert. Wie in 4 illustriert, ist die Magnetbedingungsschätzeinheit 7, welche eine der Merkmale der Synchronmaschinensteuervorrichtung gemäß der ersten Ausführungsform der vorliegenden Erfindung ist, mit einem Koordinatenwandler 11c und einer Magnettemperaturschätzvorrichtung 71 konfiguriert und gibt einen Permanentmagnettemperaturschätzwert Tmag basierend auf Strömen Iγ und Iδ auf der γ-δ-Achse aus, wenn vorgegebene Steuerbefehle (in Ausführungsform 1, vorgegebene d-q-Achsenstrombefehle Id* und Iq*) daran erteilt werden.
-
Gemäß Gleichung (9) unten, konvertiert der Koordinatenwandler 11c die Ankerströme Id und Iq auf der d-q-Achse in die Ströme Iγ und Iδ auf der γ-δ-Achse, basierend auf dem durch die Magnetflussschätzeinheit 6 erhaltenen Winkel ∠Φ0. Es kann gestattet sein, dass anstelle der Ströme Id und Iq auf der d-q-Achse, die Strombefehle Id* und Iq* auf der d-q-Achse in die Ströme Iγ und Iδ auf der γ-δ-Achse umgewandelt werden.
-
-
Der γ-Achsenstrom Iγ und der δ-Achsenstrom Iδ, welche durch die Umwandlung basierend auf der Gleichung (8) erhalten werden, entsprechen dem Magnetisierungsstrom für den Betrieb des Gesamtankerverbindungs-Magnetflusses Φ der Synchronmaschine 1 bzw. dem Drehmomentstrom, der zur Produktion des Drehmomentes der Synchronmaschine 1 beiträgt.
-
Die Magnettemperaturschätzvorrichtung 71 speichert vorläufig ein Kennfeld oder eine Gleichung, welche die Beziehung zwischen den Strömen Iγ und Iδ auf der γ-δ-Achse und der Permanentmagnettemperatur (Schätzwert) Tmag, die durch eine Temperaturänderung zu der Zeit, wenn vorgegebene d-q-Achsenstrombefehle Id* und Iq* gegeben werden, verursacht wird, anzeigen; wenn Iγ oder Iδ daran eingegeben werden, bezieht sich die Magnettemperaturschätzvorrichtung 71 auf das Kennfeld oder die Gleichung und gibt den Permanentmagnettemperaturschätzwert Tmag aus. Das vorstehende Kennfeld oder die Gleichung wird vorläufig unter Verwendung von Charakteristikdaten auf der Synchronmaschine 1 erhalten, wenn die Charakteristika (wie etwa eine Induktionsänderung und eine magnetische Demagnetisierungscharakteristik) der Synchronmaschine 1 durch eine Analyse oder dergleichen bekannt sind; wenn unbekannt, ist es nur notwendig, die Charakteristikdaten durch eine tatsächliche Messung zu erhalten.
-
5 ist ein Satz von Charakteristikgraphen zum Erläutern der Beziehung zwischen der Permanentmagnettemperatur und dem Strom Iγ oder Iδ auf der γ-δ-Achse unter einer vorgegebenen d-q-Achsenstrombefehlsbedingung; es ist ein Beispiel der Beziehung zwischen der Permanentmagnettemperatur und dem Strom Iγ oder Iδ auf der γ-δ-Achse unter einer vorgegebenen d-q-Achsenstrombefehlsbedingung repräsentiert (beispielsweise Id*:0[A], Iq*:600[A]). 5(A), in der die Abszisse den γ-Achsenstrom Iγ bezeichnet und die Ordinate die Permanentmagnettemperatur (Schätzwert) Tmag bezeichnet, repräsentiert die Charakteristik der Permanentmagnettemperatur Tmag versus den γ-Achsenstrom Iγ. 5(B), in der die Abszisse den δ-Achsenstrom Iδ bezeichnet und die Ordinate die Permanentmagnettemperatur (schätzt) Tmag bezeichnet, repräsentiert die Charakteristik der Permanentmagnettemperatur Tmag versus dem δ-Achsenstrom Iδ.
-
In dem Fall, bei dem 5(a) und/oder 5(B) existiert, kann die Permanentmagnettemperatur Tmag durch Einstellen der d-q-Achsenstrombefehle, beispielsweise Id* auf 0 [A] und Iq* auf 600 [A] und Antreiben der Synchronmaschine 1 abgeschätzt werden.
-
In der in 4 illustrierten Konfiguration ist die Ausgabe der Magnetbedingungsschätzeinheit 7 der Permanentmagnettemperaturschätzwert Tmag; jedoch, weil eine Korrelation zwischen dem Permanentmagnettemperaturschätzwert Tmag und dem Permanentmagnet-Magnetflussschätzwert Φmag existiert, kann die Ausgabe der Magnetbedingungsschätzeinheit 7 durch den Permanentmagnet-Magnetflussschätzwert Φmag ersetzt werden, durch vorläufiges Erhalten der Korrelation. Beispielsweise wird in dem Fall eines Permanentmagneten, in dem 1% an Demagnetisierung verursacht wird, wenn die Temperatur um 10°C steigt, die Beziehung zwischen dem Permanentmagnettemperaturschätzwert Tmag und dem Permanentmagnet-Magnetflussschätzwert Φmag durch die Gleichung (9) unten gegeben, wobei T0 und Φm0 eine Referenztemperatur bzw. einen Permanentmagnet-Magnetfluss zur Zeit, wenn die Temperatur T0 ist, bezeichnen. Φmag = Φm0·{1 – (Tmag T0)·0.001} (9)
-
Als Nächstes wird das Prinzip erläutert, in dem, wenn vorgegebene d-q-Achsen-Strombefehle Id* und Iq* erteilt werden, die Permanentmagnettemperatur Tmag basierend auf dem Strom Iγ oder Iδ auf der γ-δ-Achse abgeschätzt wird. 6 ist ein Satz erläuternder Diagramme, welche den Unterschied zwischen einem Vektordiagramm bei der Referenzbedingung und einem Vektordiagramm zu der Zeit, wenn die Demagnetisierung unter einer gegebenen Bedingung des d-q-Achsenstrombefehls verursacht wird, in einem Vektordiagramm einer Synchronmaschine mit einem Magnetfeld-Permanentmagneten; 6(A) ist ein Vektordiagramm zu der Zeit, wenn der Permanentmagnet in der Referenzbedingung ist, das heißt keine Demagnetisierung im Permanentmagnet verursacht wird; 6(B) ist ein Vektordiagramm zu einer Zeit, wenn 6(A) als eine Referenz verwendet wird, der Permanentmagnet in einem stabilen Zustand ist, bei dem Steuerbefehle, das heißt die vorgegebenen d-q-Achsenstrombefehle Id* und Iq* in Ausführungsform 1 konstant sind (unter der Annahme, dass die gewünschte Steuerung durchgeführt wird, sind auch die d-q-Achsenströme Id und Iq konstant) und Demagnetisierung (Abnahme beim Magnetfluss entsprechend ΔΦmag) des Permanentmagneten aufgrund eines Temperaturanstiegs in der Synchronmaschine 1 verursacht wird.
-
Wie in 5 repräsentiert, ändert die Demagnetisierung die Richtung des Gesamtankerverbindungsmagnetflusses Φ, das heißt die Richtung der γ-Achse; daher tritt in dem Fall, bei dem die Koordinatenumwandlung auf die d-Achse-Ströme Id und Iq angewendet wird, eine Änderung zwischen den Prä-Demagnetisierungs-δ-Achsenströmen Iγ und Iδ und den Post-Demagnetisierungs-γ-δ-Achsenströmen Iγ und Iδ auf, selbst wenn die d-q-Achsenströme Id und Iq konstant gehalten werden; somit kann durch Erfassen der Änderung bei den γ-δ-Achsenströmen Iγ und Iδ auch eine Änderung im Permanentmagnet-Magnetflussschätzwert Φmag, d. h. eine Änderung bei der Permanentmagnettemperatur Tmag erfasst werden.
-
In der vorstehenden Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 der vorliegenden Erfindung ist es nicht erforderlich, einen Temperaturdetektor direkt auf dem Permanentmagnet zu montieren und die Permanentmagnettemperatur (oder der Magnetfluss) der Synchronmaschine 1 wird basierend nicht auf Spannungsinformation, sondern auf den γ-δ-Achsenströmen Iγ und Iδ abgeschätzt; daher ergibt die Spannungsausgabegenauigkeit (d. h. ein durch die Totzeit des Wechselrichters verursachter Spannungsfehler) der elektrischen Stromwandlungseinheit 2 kaum einen adversen Effekt, wodurch sich ein Effekt zeigt, bei dem die Temperatur oder der Magnetfluss des Permanentmagneten genau geschätzt werden können.
-
Wenn zumindest eine Art von Kennfelddaten existiert, können diese Werte geschätzt werden; somit wird eine Wirkung demonstriert, bei der die Permanentmagnettemperatur oder der Magnetfluss mit weniger Kennfelddaten abgeschätzt werden können.
-
Ausführungsform 2
-
Als Nächstes wird eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung erläutert. 7 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung zusammen mit einer Synchronmaschine illustriert. In Ausführungsform 1 sind als die Steuerbefehle die d-q-Achsenstrombefehle Id* und Iq* gegeben; jedoch sind in Ausführungsform 2 als die Steuerbefehle der Gesamtankerverknüpfungsmagnetflussbefehl Φ* und der δ-Achsenstrombefehl Iδ* gegeben. Obwohl nicht besonders illustriert, kann auch in Ausführungsform 2 eine Konfiguration angenommen werden, in der, wie in 2 illustriert, eine Positionsdetektionseinheit 5 vorgesehen ist, welche die Rotorposition θ durch eine Schätzkalkulation erhält.
-
Nachfolgend werden hauptsächlich die sich von jenen in Ausführungsform 1 unterscheidenden Teile erläutert; die Erläuterung für dieselben Teile wie jene in Ausführungsform 1 wird angemessen weggelassen. Zuerst wird in Bezug auf eine für den Antrieb der Synchronmaschine 1 in Ausführungsform 2 erforderliche Konfiguration der Fluss von der Verarbeitung, in der die Ankerströme iu, iv und iw der Synchronmaschine 1 in die Ströme Id und Iq auf der d-q-Achse durch eine Berechnung gemäß Gleichung (1) umgewandelt werden, basierend auf der Rotorposition 0, bis zur Erzeugung eines an der elektrischen Stromwandlungseinheit 2 eingegebenen Spannungsbefehls erläutert.
-
In 7 schätzt die Magnetflussschätzeinheit 6a den Winkel ∠Φ0 zwischen der d-Achse und der Richtung des geschätzten Gesamtankerverbindungs-Magnetflusses Φ, wie in Ausführungsform 1 beschrieben, und erhält den Winkel ∠Φ (nachfolgend als die Phase des Gesamtankerverbindungs-Magnetflusses Φ ausgedrückt) zwischen der Richtung des geschätzten Gesamtankerverbindungs-Magnetflusses Φ und einer Achse, die durch Nehmen der Größe |Φ| des Gesamtankerverbindungs-Magnetflusses Φ und der u-Phasen-Ankerwicklung als Referenzen etabliert wird. Spezifisch werden durch das in Ausführungsform 1 beschriebene Verfahren die d-Achsenkomponente Φd und die q-Achsenkomponente Φq des Gesamtankerverbindungs-Magnetflusses Φ geschätzt und dann wird die Absolutgröße |Φ| und die Phase ∠Φ des Gesamtankerverbindungs-Magnetflusses Φ basierend auf den Gleichungen (10) und (11) erhalten. ∠Φ = tan–1( Φq / Φd) + θ = ∠Φ0 + θ (11)
-
8 ist ein Systemdiagramm, das ein Beispiel einer Konfiguration einer Spannungsbefehlsberechnungseinheit in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung illustriert. Wie in 8 illustriert, ist die Spannungsbefehlsberechnungseinheit 4a mit einer γ-Achsenstrom-Befehlserzeugungsvorrichtung 41 und einer γ-δ-Achsenspannungsbefehlserzeugungsvorrichtung 42 konfiguriert und gibt die γ-δ-Achsenspannungsbefehle Vγ* und Vδ* auf solche Weise aus, dass der Gesamtankerverbindungs-Magnetfluss Φ und der δ-Achsenstrom Iδ mit gewünschten Steuerbefehlen koinzidieren, d. h. dem Gesamtankerverbindungs-Magnetfluss Φ* bzw. dem δ-Achsenstrombefehl Iδ*.
-
Basierend auf einem Magnetflussfehler ΔΦ erzeugt die γ-Achsenstrom-Befehlserzeugungsvorrichtung 41 einen γ-Achsenstrombefehl Iγ* auf solche Weise, dass der Gesamtankerverbindungsmagnetflussfehler ΔΦ auf Null justiert wird. Der Magnetflussfehler ΔΦ wird durch Subtrahieren der Absolutgröße |Φ| des Gesamtankerverbindungs-Magnetflusses Φ, die durch Gleichung (10) erhalten worden ist, vom Gesamtankerverbindungs-Magnetfluss Φ* berechnet; Gleichung (12) unten ist dessen arithmetischer Ausdruck. ΔΦ = Φ* – |Φ| (12)
-
Weil der γ-Achsenstrom Iγ ein Magnetisierungsstrom ist, der die Magnetisierungskomponente für die Synchronmaschine 1 ist, kann der Gesamtankerverbindungs-Magnetfluss durch den γ-Achsenstrom betrieben werden. Spezifisch sind der Anstieg/Abfallbetrag des Magnetisierungsstroms und der Anstieg/Abfallbetrag des Gesamtankerverbindungs-Magnetflusses zueinander in Proportion, mit der γ-Achsenrichtungsinduktion Lγ als Proportionalitätskoeffizient; als die Steuervorrichtung zum Justieren des Magnetflussfehlers ΔΦ auf Null ist beispielsweise ein Integrator geeignet.
-
Aus diesem Grund wird der γ-Achsenstrombefehl Iγ* durch Verwenden einer durch die Gleichung (13) unten repräsentierte Integrationssteuerberechnung erzeugt. Iγ* = Kf·δΦ / s (13) wobei Kf eine Integrationsverstärkung ist.
-
Die γ-δ-Achsenspannungsbefehle Vγ* und Vδ* werden auf solche Weise ausgegeben, dass die γ-δ-Achsenströme Iγ und Iδ mit den Strombefehlen Iγ* bzw. Iδ* koinzidieren. Wie im Falle von Ausführungsform 1 werden die γ-δ-Achsenströme Iγ und Iδ durch eine später beschriebene Magnetbedingungsschätzeinheit
7a erhalten. In dem Fall, bei dem eine Stromrückkopplungssteuerung durchgeführt wird, basierend auf den entsprechenden Differenzen zwischen den Strombefehlen Iγ* und Iγ* auf der γ-δ-Achse und den Strömen Iγ und Iδ auf der γ-δ-Achse, wird eine proportionale Integralsteuerung (PI-Steuerung) gemäß Gleichung (14) unten so durchgeführt, dass die Spannungsbefehle (Stromrückkopplungssteuerbefehle) Vγ* und Vδ* auf der γ-δ-Achse erzeugt werden.
wobei Kpγ eine Stromsteuer-γ-Achsen-Proportionalverstärkung ist, Kiγ eine Stromsteuer-γ-Achsen-Integralverstärkung ist, Kpδ eine Stromsteuer-δ-Achsen-Proportionalverstärkung ist und Kiδ eine Stromsteuer-δ-Achsen-Integralverstärkung ist.
-
In dem Fall, in dem es schwierig ist, eine Stromrückkopplungssteuerung durchzuführen, kann eine Spannungsvorsteuerung durchgeführt werden, wie im Falle von Ausführungsform 1. In dieser Hinsicht jedoch ist es, um die Spannungsvorsteuerung durchzuführen, erforderlich, die Drehzahl ω und die Amplitude |Φ| des Ankerverbindungsmagnetflusses, die nicht als die Eingaben der Spannungsbefehlsberechnungseinheit 4 in 7 illustriert sind, an der Spannungsbefehlsberechnungseinheit 4 einzugeben; somit, wie oben beschrieben, wird die Drehzahl ω durch Durchführen einer Differentialoperation basierend auf der Rotorposition θ vorläufig erhalten.
-
In dem Fall, bei dem die Spannungsvorsteuerung durchgeführt wird, werden die Spannungsbefehle auf der γ-δ-Achse (Spannungsvorsteuerbefehle) Vγ* und Vδ* über die Gleichung (15) unten erzeugt, basierend auf den Strombefehlen Iγ* und Iδ* auf der γ-δ-Achse, der Drehzahl ω und der Amplitude |Φ| des Ankerverbindungsmagnetflusses.
-
-
In der Gleichung (15) sind alle in der Berechnung eingesetzten γ-δ-Achsenströme Iγ* und Iδ*; jedoch können anstelle dieser Ströme die Ströme Iγ und Iδ auf der γ-δ-Achse oder der Durchschnittswert von Iγ* und Iγ und der Durchschnittswert von Iδ* und Iδ eingesetzt werden. Es kann gestattet sein, dass im Normalmodus nur Stromrückkopplungssteuerung oder sowohl Stromrückkopplungssteuerung als auch Spannungsvorsteuerung durchgeführt werden, und unter eine Fahrbedingung, bei der Stromrückkopplungssteuerung schwierig durchzuführen ist, wird eine Stromrückkopplungssteuerung negiert und wird nur eine Spannungsvorsteuerung durchgeführt.
-
Die Spannungsbefehle Vγ* und Vδ auf der aus der Kommunikationsverarbeitung ausgegebenen γ-δ-Achse werden durch den Koordinatenwandler 11d in Spannungsbefehle vu*, vv* und vw* über die Gleichung (16) unten basierend auf der Phase ∠φ des Gesamtankerverbindungs-Magnetflusses Φ, der durch die Magnetflussschätzeinheit 6a abgeschätzt worden ist, umgewandelt und werden an die elektrische Stromwandlungseinheit 2 ausgegeben.
-
-
In dieser Hinsicht kann es jedoch gestattet sein, unter Berücksichtigung, dass in Gleichung (16) die Steuerberechnungsverzögerungszeit (Abfallzeit) bis die Steuerberechnung basierend auf den Ankerströmen iu, iv und iw, die durch die Stromdetektionseinheit 3 detektiert sind, an den Spannungen vu, vv und vw, die aus der elektrischen Stromwandlungseinheit 2 ausgegeben werden, reflektiert ist, dass die Koordinatenumwandlung mit einer Phase durchgeführt wird, die durch Korrigieren der Rotorposition θ um einen Phasenkorrekturbetrag Δθd2 erhalten wird, basierend auf der Steuerberechnungsverzögerungszeit.
-
Wie es der Fall bei Ausführungsform 1 ist, legt die elektrische Stromwandlungseinheit 2 die Spannungen vu, vv, vw an die Synchronmaschine 1 an, basierend auf den Spannungsbefehlen vu*, vv* und vw*, über ein bekanntes PWM-Steuerverfahren oder dergleichen.
-
Als Nächstes wird die Magnetbedingungsschätzeinheit 7a erläutert, welches eine zum Abschätzen der Temperatur des Magnetflussbetrags des Permanentmagneten erforderliche Konfiguration ist. 9 ist ein Konfigurationsdiagramm, das ein Beispiel der Konfiguration einer Magnetbedingungsschätzeinheit in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung illustriert. In 9 ist die Magnetbedingungsschätzeinheit 7a mit einem Koordinatenwandler 11c und der Magnettemperaturschätzvorrichtung 71a konfiguriert und gibt den Permanentmagnettemperaturschätzwert Tmag basierend auf dem γ-Achsenstrom Iγ aus, wenn vorgegebene Steuerbefehle (in Ausführungsform 2 der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehl Iδ*) daran gegeben werden.
-
Gemäß Gleichung (8) wandelt der Koordinatenwandler 11c die Ströme Id und Iq auf der d-q-Achse in die Ströme Iγ und Iδ auf der γ-δ-Achse um, basierend auf dem durch die Magnetflussschätzeinheit 6a erhaltenen Winkel ∠Φ0. Die Werte der Ströme Iγ und Iδ auf der γ-δ-Achse, erzeugt durch den Koordinatenwandler 11c, werden auch in der Spannungsbefehlsberechnungseinheit 4a verwendet.
-
Die Magnettemperaturschätzvorrichtung 71a speichert vorab ein Kennfeld oder eine Gleichung, welche die Beziehung zwischen dem γ-Achsenstrom Iγ und der Permanentmagnettemperatur (Schätzwert) Tmag anzeigt, die durch eine Temperaturänderung zu der Zeit verursacht wird, wenn der vorgegebene Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehls Iδ* erteilt werden; wenn die γ-Achse Iγ daran eingegeben wird, bezieht sich die Magnettemperaturschätzvorrichtung 71a auf das Kennfeld oder die Gleichung und gibt den Permanentmagnettemperaturschätzwert Tmag aus. Wie im Falle von Ausführungsform 1, wird das vorstehende Kennfeld oder die Gleichung vorläufig unter Verwendung von Charakteristikdaten zur Synchronmaschine 1 erhalten, wenn die Charakteristika (wie etwa eine Induktionsänderung und eine magnetische Demagnetisierungs-Charakteristik) der Synchronmaschine 1 durch eine Analyse oder dergleichen bekannt sind; wenn nicht bekannt, ist es nur notwendig, die Charakteristikdaten durch eine tatsächliche Messung zu erhalten. Anstelle der Magnettemperaturschätzvorrichtung 71a einzugebenden γ-Achsenstroms Iγ kann der aus der γ-Achsenstrom-Befehlserzeugungsvorrichtung 41 ausgegebene Strombefehl Iγ* eingesetzt werden.
-
10 ist ein Charakteristikgraph zum Erläutern der Beziehung zwischen der Permanentmagnettemperatur Tmag und dem γ-Achsenstrom Iγ bei vorgegebenen Bedingungen des Gesamtankerverbindungs-Magnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ*; als ein Beispiel wird die Beziehung zwischen der Permanentmagnettemperatur Tmag und dem γ-Achsenstrom Iγ unter der Bedingung repräsentiert, dass der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehl Iδ* auf 0,08 [Wb] bzw. 450 [A] eingestellt sind. 10(A), in welcher die Abszisse den γ-Achsenstrom Iγ bezeichnet und die Ordinate die Permanentmagnettemperatur (Schätzwert) Tmag bezeichnet, repräsentiert die Charakteristik der Permanentmagnettemperatur (Schätzwert) Tmag versus dem γ-Achsenstrom Iγ.
-
Wie in 10, repräsentiert, kann beispielsweise durch Einstellen des Gesamtankerverbindungs-Magnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ* auf 0,08 [Wb] bzw. 450 [A], um so die Synchronmaschine 1 anzutreiben, die Permanentmagnettemperatur Tmag basierend auf dem γ-Achsenstrom Iγ geschätzt werden. In der in 9 illustrierten Konfiguration ist die Ausgabe der Magnetbedingungsschätzeinheit 7a der Permanentmagnettemperaturschätzwert Tmag; weil jedoch wie oben beschrieben, es eine Korrelation zwischen dem Permanentmagnettemperaturschätzwert Tmag und dem Permanentmagnet-Magnetflussschätzwert Φmag gibt, kann die Ausgabe der Magnetbedingungsschätzeinheit 7a durch den Permanentmagnet-Magnetflussschätzwert Φmag ersetzt werden, durch vorläufiges Erhalten der Korrelation.
-
Hier sind durch Verwenden eines Vektordiagramms der Synchronmaschine, die Prinzipien erläutert, in denen, wenn als vorgegebene Steuerbefehle der Gesamtankerverbindungs-Magnetflussbefehls Φ* und der δ-Achsenstrombefehl Iδ* gegeben sind, die Permanentmagnettemperatur Tmag basierend auf dem γ-Achsenstrom Iγ abgeschätzt wird. 11 ist ein Satz erläuternder Diagramme, welche den Unterschied zwischen einem Vektordiagramm bei einer Referenzbedingung und einem Vektordiagramm zu einer Zeit, wenn eine Demagnetisierung unter gegebenen Bedingungen des Gesamtankerverbindungs-Magnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ* verursacht wird, in einem Vektordiagramm einer Synchronmaschine mit einem Magnetfeld-Permanentmagneten repräsentieren. In 11 ist 11(A) ein Vektordiagramm zu einer Zeit, wenn der Permanentmagnet in der Referenzbedingung ist, d. h. keine Demagnetisierung im Permanentmagneten verursacht wird; ist 6(B) ein Vektordiagramm zu einer Zeit, wenn der Magnetfluss um einen Betrag entsprechend einer Demagnetisierung des Permanentmagneten abnimmt, die aufgrund eines Temperaturanstiegs in der Synchronmaschine 1 verursacht wird, d. h. durch ΔΦmag, wenn der Permanentmagnet in einem stabilen Zustand ist, bei dem die Größe |Φ| des Gesamtankerverbindungs-Magnetflusses und der δ-Achsenstrom Iδ unter der Annahme konstant sind, dass der Gesamtankerverbindungs-Magnetflussbefehls Φ* und der δ-Achsenstrombefehl Iδ*, die vorgegebene Steuerbefehle sind, konstant sind, das heißt wünschenswert gesteuert.
-
Die vorstehende Demagnetisierung des Permanentmagneten ändert die Richtung des Gesamtankerverbindungs-Magnetflusses Φ, das heißt die Richtung der γ-Achse; daher tritt eine Änderung zwischen dem Prä-Demagnetisierungs-γ-Achsenstrom Iγ und dem Post-Demagnetisierungs-γ-Achsenstrom Iγ auf, selbst wenn der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehl Iδ* konstant gehalten werden; somit kann durch Erfassen der Änderung beim γ-Achsenstrom Iγ auch eine Änderung beim Permanentmagnet-Magnetflussschätzwert Φmag, d. h. eine Änderung bei der Permanentmagnettemperatur Tmag, erfasst werden.
-
In der vorstehenden Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 der vorliegenden Erfindung, ist es wie im Falle von Ausführungsform 1 nicht erforderlich, einen Temperaturdetektor direkt auf dem Permanentmagneten zu montieren und die Permanentmagnettemperatur (oder der Magnetfluss) der Synchronmaschine 1 wird abgeschätzt basierend nicht auf Spannungsinformationen, sondern auf dem γ-Achsenstrom Iγ; daher ergibt die Spannungsausgabegenauigkeit, beispielsweise ein durch die Totzeit des Wechselrichters verursachter Spannungsfehler der elektrischen Stromwandlungseinheit 2, kaum einen adversen Effekt, wodurch die Wirkung demonstriert wird, dass die Temperatur oder der Magnetfluss des Permanentmagneten genau geschätzt werden können. Wenn zumindest eine Art von Kartendaten existiert, können diese Werte geschätzt werden; somit wird eine Wirkung demonstriert, dass die Permanentmagnettemperatur oder der Magnetfluss mit weniger Kennfelddaten geschätzt werden kann.
-
Ausführungsform 3
-
Als Nächstes wird eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung erläutert. 12 ist ein Systemkonfigurationsdiagramm, das eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung illustriert; 13 ist ein Systemkonfigurationsdiagramm, das ein Variantenbeispiel einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung, zusammen mit einer Synchronmaschine illustriert. Wie in den 12 sowie 13 illustriert, wird in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung eine Steuerbefehlsberechnungseinheit 8 (oder 8a) hinzugefügt, die ein höheres Hierarchiebefehlserzeugungssystem zum Erzeugen der Steuerbefehle basierend auf dem Drehmomentbefehl ist, so dass der Drehmomentbefehl anhand des γ-Achsenstroms Iγ beschränkt ist und die Steuerbefehle gemäß dem begrenzten Drehmomentbefehl ausgegeben werden.
-
In 12 erzeugt die Steuerbefehlsberechnungseinheit 8 den d-q-Achsenstrombefehl Id* und Iq* als die in Ausführungsform 1 erläuterten Steuerbefehle; im Gegensatz dazu erzeugt in 13 die Steuerbefehlsberechnungseinheit 8a den Gesamtankerverbindungs-Magnetflussbefehls Φ* und den δ-Achsenstrombefehl Iδ* als die in Ausführungsform 2 erläuterten Steuerbefehle. Wie in 12 und 13 illustriert, ist die Steuerbefehlsberechnungseinheit 8 (8a) mit einer Drehmomentbefehlsbegrenzungsvorrichtung 81 und einer Steuerbefehlserzeugungsvorrichtung 82 (82a) verbunden. Die Konfigurationen der Drehmomentbefehlsbegrenzungsvorrichtungen 81 in 12 und 13 sind gleich. Nachfolgend werden der durch die Drehmomentbefehlsbeschränkungsvorrichtung 81 ? zu beschränkende Drehmomentbefehl und der (beschränkte) Drehmomentbefehl, die Ausgabe der Drehmomentbefehlsbeschränkungsvorrichtung 81, voneinander dadurch unterschieden, dass τ* den Ersteren und τ0* den Letzteren bezeichnen.
-
Wie oben beschrieben, entspricht der γ-Achsenstrom Iγ dem Magnetisierungsstrom zum Betreiben des Gesamtankerverbindungs-Magnetflusses der Synchronmaschine 1; wenn aufgrund eines Temperaturanstiegs in der Synchronmaschine 1 eine Demagnetisierung (Absinken beim Magnetfluss entsprechend ΔΦmag) des Permanentmagneten verursacht wird, kompensiert ein Anstieg beim γ-Achsenstrom Iγ den Magnetfluss entsprechend der Demagnetisierung (es existiert eine Ausnahme in dem Fall, wo als Steuerbefehle die d-q-Achsenstrombefehle Id* und Iq* erteilt werden).
-
Entsprechend steigt, wenn der γ-Achsenstrom Iγ ansteigt, auch der Ankerstrom (Effektivwert) der Synchronmaschine 1 an; somit steigt auch aufgrund der Wärme (wie der im Widerstand der Ankerwicklung erzeugten Wärme), die in der Synchronmaschine 1 erzeugt wird, die Temperatur der den Permanentmagneten beinhaltenden Gesamt-Synchronmaschine 1 an, wodurch Demagnetisierung des Permanentmagneten erleichtert wird. Weiterhin, wenn die gestattete Temperatur überschritten wird, kann eine irreversible Demagnetisierung verursacht werden, in der selbst dann, wenn die Temperatur auf die Normaltemperatur abfällt, der Magnetfluss nicht zu dem Zustand zu der Zeit zurückkehrt, bevor die Demagnetisierung verursacht wurde. Es gibt einen oberen Grenzwert des Ankerstroms der Synchronmaschine 1, der durch die Leistungsfähigkeit (d. h. die Vorrichtungseinstufung der Schaltvorrichtung, die ein Bestandteilselement der elektrischen Stromwandlungseinheit 2 ist) der elektrischen Stromwandlungseinheit 2 beschränkt ist; es ist möglich, dass aufgrund des Anstiegs beim γ-Achsenstrom Iγ der obere Grenzwert überschritten wird, Entsprechend, wenn die Temperatur der Synchronmaschine 1 steigt, um die Temperatur an einem weiteren Anstieg zu hindern und den Ankerstrom der Synchronmaschine 1, den oberen Grenzwert zu übersteigen, wird der Drehmomentbefehl τ* anhand des γ-Achsenstroms Iγ so beschränkt, dass die Größen der Steuerbefehle (der d-q-Achsenstrombefehle Id* und Iq*, oder der Gesamtankerverbindungs-Magnetflussbefehls Φ* und der δ-Achsenstrombefehl Iδ*) indirekt reduziert werden und daher der Ankerstrom (Effektivwert) am Steigen gehindert wird.
-
Die Drehmomentbefehlsbeschränkungsvorrichtung 81 beschränkt den Drehmomentbefehl τ* anhand des γ-Achsenstroms Iγ und gibt den (beschränkten) Drehmomentbefehl τ0* aus. Die Korrelation zwischen dem γ-Achsenstrom Iγ und dem Drehmomentbefehl τ* wird anhand der Fahrbedingung, der Wärmekapazität der Synchronmaschine 1 oder deren Kühlleistung und der Leistungsfähigkeit der elektrischen Stromwandlungseinheit 2 eingestellt. Wenn beispielsweise bei vorgegebenen Steuerbefehlen der γ-Achsenstrom Iγ einen gegebenen Wert übersteigt, wird festgestellt, dass die Permanentmagnettemperatur sich einer Temperatur angenähert hat, die zu irreversibler Demagnetisierung führt, und dann wird der Drehmomentbefehl abgesenkt; extrem gesagt wird beispielsweise eine Verarbeitung des Absenkens des Drehmomentbefehls auf ”0” implementiert und wird der (beschränkte) Drehmomentbefehl τ0* ausgegeben. Es kann gestattet werden, dass mit Anstieg des γ-Achseristroms Iγ der Beschränkungswert des Drehmomentbefehls τ* schrittweise reduziert wird.
-
Im in 13 illustrierten Modus, in dem der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehl Iδ* vorgesehen sind, existiert ein Wert des γ-Achsenstrombefehls Iγ*, der aus der Magnetisierungsstrombefehlserzeugungsvorrichtung 41 ausgegeben wird; somit kann statt des γ-Achsenstroms Iγ, Iγ* eingesetzt werden.
-
Basierend auf dem (beschränkten) Drehmomentbefehl τ0* erzeugt die Steuerbefehlserzeugungsvorrichtung 82 in 12 die d-q-Achsenstrombefehle Id* und Iq*, die Steuerbefehle sind. Im Falle der Synchronmaschine 1, die einen Magnetfeld-Permanentmagneten aufweist, ist es bekannt, dass zahlreiche Kombinationen der d-Achse-Ströme Id und des q-Achse-Stroms Iq existieren, die ein und dasselbe Drehmoment erzeugen können; für den (beschränkten) Drehmomentbefehl τ0* werden angemessene d-q-Achsenstrombefehle Id* und Iq*, die den gewünschten Bedingungen entsprechen (z. B. maximale Effizienz, maximales Drehmoment und dergleichen) ausgegeben.
-
Die Verfahren zum Auswählen der d-q-Achsenstrombefehle Id* und Iq* beinhalten ein bekanntes Verfahren, die Effizienz eines Motors maximal zu machen, ein Verfahren, den Leistungsfaktor eines Motors zu ”1” zu machen, ein Verfahren, das für einen gegebenen Verbindungsmagnetfluss erhaltene Drehmoment maximal zu machen, ein Verfahren, das für einen gegebenen Motorstrom erhaltene Drehmoment maximal zu machen, und dergleichen. In der Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 der vorliegenden Erfindung kann ein beliebiges Verfahren bei Auswahl der d-q-Achsenstrombefehle Id* und Iq* eingesetzt werden, basierend auf dem Drehmomentbefehl τ0*, und daher werden Details des Verfahrens zum Auswählen dieser Strombefehle Id* und Iq* weggelassen; jedoch existiert beispielsweise als das einfachste Verfahren ein Verfahren, bei dem der negative d-Achsenstrombefehlswert Id* auf solche Weise justiert wird, dass die d-q-Achsenspannungsbefehle Vd* und Vq*, die aus der Spannungsbefehlsberechnungseinheit 4 ausgegeben werden, den Maximalwert, den die elektrische Stromwandlungseinheit 2 an die Synchronmaschine 1 legen kann, nicht übersteigen, und dann wird der q-Achsen-Strombefehl Iq* basierend auf Gleichung (17) erzeugt.
-
Der Permanentmagnet-Magnetfluss Φm in der Gleichung (17) unten ändert sich mit Temperaturänderung; somit wird zu einer Zeit, wenn der Antrieb gestartet wird, der Permanentmagnet-Magnetfluss Φm auf einen vorgegebenen Wert wie etwa einen Referenzwert eingestellt und wird dann durch einen Permanentmagnet-Magnetflussschätzwert Φmag rekursiv und sequentiell aktualisiert, der durch Durchführen der Magnettemperatur-(Magnetfluss)Schätzung erhalten werden kann. Iq* = τ0* / Pm·{Φm + (Ld – Lq)·ld*} (17) wobei Pm die Anzahl von Polpaaren in der Synchronmaschine 1 ist.
-
Als ein anderes als die vorstehenden kann ein Verfahren eingesetzt werden, in welchem die optimalen Werte der d-q-Achsenströme Id und Iq, die verschiedenen Arten von Drehmoment der Synchronmaschinen 1 entsprechen, vorläufig gemessen und kartiert werden und dann während des Betriebs nach Notwendigkeit Bezug auf das Kennfeld genommen wird, in Übereinstimmung mit dem (beschränkten) Drehmomentbefehl τ0*, so dass die τ0* entsprechenden q-Achse-Strombefehle Id* und Iq* erhalten werden.
-
In 13, die ein Variantenbeispiel der Synchronmaschinensteuervorrichtung gemäß Ausführungsform 3 illustriert, erzeugt basierend auf dem (beschränkten Drehmomentbefehl τ0* die Steuerbefehlserzeugungsvorrichtung 82a den Gesamtankerverbindungs-Magnetflussbefehl Φ* und den δ-Achsenstrombefehl Iδ*, welche Steuerbefehle sind. Wie in dem Fall, wo als Steuerbefehl die d-q-Achsenstrombefehle Id* und Iq* erzeugt werden, ist es im Falle der Synchronmaschine 1, die einen Magnetfeld-Permanentmagneten aufweist, bekannt, dass zahlreiche Kombinationen des Gesamtankerverbindungs-Magnetflusses Φ und des δ-Achsenstroms Iδ existieren, die ein und dasselbe Drehmoment erzeugen können; für den (beschränkten) Drehmomentbefehl τ0* gibt die Steuerbefehlserzeugungsvorrichtung 82a den Gesamtankerverbindungs-Magnetflussbefehls Φ* und den δ-Achsenstrombefehl Iδ* aus, die angemessene Steuerbefehle sind, die den gewünschten Bedingungen genügen (z. B. maximale Effizienz, maximales Drehmoment und dergleichen).
-
14 ist ein Diagramm, das ein Beispiel der Steuerbefehlserzeugungsvorrichtung in 13 illustriert. In 14 ist die Steuerbefehlserzeugungsvorrichtung 82a mit einer δ-Achsenstrombefehlserzeugungsvorrichtung 83 und einer Magnetflussbefehlserzeugungsvorrichtung 84 konfiguriert; um die Steuerbefehlserzeugungsvorrichtung 82a geeigneter zu machen, wird eine δ-Achsenstrombefehlsbeschränkungsvorrichtung 85 hinzugefügt, welche den δ-Achsenstrombefehl Iδ* unter Verwendung eines γ-Achsenstrombefehls Iγ* (angezeigt durch den Strichlinienpfeil in 14), der durch die Spannungsbefehlsberechnungseinheit 4a berechnet wird, beschränkt.
-
Basierend auf dem (beschränkten) Drehmomentbefehl τ0* und dem aus der Magnetflussbefehlserzeugungsvorrichtung 84 ausgegebenen Gesamtankerverbindungs-Magnetflussbefehls Φ* berechnet die δ-Achsenstrombefehlserzeugungsvorrichtung 83 den δ-Achsenstrombefehl Iδ* über die Gleichung (18) unten. Iδ* = τ0* / Pm·Φ* (18)
-
In dem Fall, bei dem der Magnetflussfehler ΔΦ in der Magnetisierungsstrombefehlserzeugungsvorrichtung 41 in der in 8 illustrierten Spannungsbefehlsberechnungseinheit 4a auf Null justiert wird, kann der Absolutwert Φ des durch Gleichung (10) unten erhaltenen Gesamtankerverbindungs-Magnetflusses statt des Gesamtankerverbindungs-Magnetflussbefehls Φ*, in der Berechnung gemäß der Gleichung (18) eingesetzt werden. Iδ* = τ0* / Pm·|Φ| (19)
-
In dem Fall, bei dem die δ-Achsenstrombefehlsbeschränkungsvorrichtung 85 hinzugefügt ist, wird der δ-Achsenstrombefehl Iδ* auf einen Strombeschränkungswert Imax basierend beschränkt, der basierend auf der Spezifikation oder dergleichen der elektrischen Stromumwandlungseinheit 2 bestimmt wird, und der γ-Achsenstrombefehl Iγ* auf solche Weise, dass der synthetische, elektrische Strom des δ-Achsenstrombefehl Iδ* und der γ-Achsenstrombefehl Iγ* auf den Strombeschränkungswert Imax beschränkt ist. Der obere Grenzwert Iδ*max des δ-Achsenstrombefehl Iδ* wird über Gleichung (20) unten erhalten; während Iδ*max sequentiell erhalten wird, wird der δ-Achsenstrombefehl Iδ* auf solche Weise beschränkt, dass der Absolutwert des δ-Achsenstrombefehl Iδ* gleich oder kleiner als Iδ*max wird. Iδ*max = √(Imax)² – (Iγ*)² (20)
-
In Reaktion auf den eingegebenen δ-Achsenstrombefehl Iδ* gibt die Magnetflussbefehlserzeugungsvorrichtung 84 einen optimalen Gesamtankerverbindungs-Magnetflussbefehl Φ* aus, beispielsweise den Gesamtankerverbindungs-Magnetflussbefehl Φ*, mit dem das maximale Drehmoment unter einer Bedingung ausgegeben wird, bei der der Ankerstrom (Effektivwert) der Synchronmaschine 1 konstant ist.
-
Wenn die Synchronmaschine 1 unter den vorstehenden Bedingungen angetrieben wird, wird der in dem Anschlussdraht zwischen der Ankerwicklung der Synchronmaschine 1 und der elektrischen Stromwandlungseinheit 2 verursachte Kupferverlust kleiner und wird auch der in der elektrischen Stromwandlungseinheit 2 verursachte Leitungsverlust kleiner; daher werden die Umwandlungseffizienzen der Synchronmaschine 1 und der elektrischen Stromwandlungseinheit 2 erhöht.
-
15 ist ein Konzeptdiagramm zum Erläutern der Beziehung zwischen dem δ-Achsenstrombefehl Iδ* und dem Gesamtankerverbindungs-Magnetflussbefehl Φ* in der Magnetflussbefehlserzeugungsvorrichtung 14 und repräsentiert ein Beispiel der Beziehung zwischen dem δ-Achsenstrombefehl Iδ* und dem Gesamtankerverbindungs-Magnetflussbefehl Φ*, welche die vorstehenden Bedingungen erfüllt; die Beziehung wird vorläufig als eine Gleichung oder als Tabellendaten in der Magnetflussbefehlserzeugungsvorrichtung 84 gespeichert und dann wird eine optimale Gesamtankerverbindungs-Magnetflussbefehl Φ* in Reaktion auf den eingegebenen δ-Achsenstrombefehl Iδ* ausgegeben.
-
Als ein anderer optimaler Gesamtankerverbindungs-Magnetflussbefehl Φ*, obwohl in 14 nicht illustriert, existiert ein Gesamtankerverbindungs-Magnetflussbefehl Φ*, für den zusätzlich zum δ-Achsenstrombefehl Iδ* auf die Drehzahl ω der Synchronmaschine 1 Bezug genommen wird, und mit dem der Eisenverlust, einschließlich des Wirbelstromverlustes und des Hystereseverlustes in der Synchronmaschine 1, der von der Geschwindigkeit abhängt, für den δ-Achsenstrombefehl Iδ* reduziert werden kann. Wenn die Synchronmaschine 1 unter diesen Bedingungen betrieben wird, wird der in der Synchronmaschine 1 verursachte Eisenverlust reduziert, der auffällig wird, wenn deren Drehzahl hoch ist; somit wird hauptsächlich in der Zone hoher Drehzahl die Umwandlungseffizienz der Synchronmaschine 1 angehoben.
-
In dem Fall, bei dem in der in 14 illustrierten Steuerbefehlserzeugungsvorrichtung 82a die δ-Achsenstrombefehlsbeschränkungsvorrichtung 85 hinzugefügt ist und der δ-Achsenstrombefehl Iδ* durch Gleichung (20) beschränkt wird, wird die aus der δ-Achsenstrombefehlserzeugungsvorrichtung 83 an die Magnetflussbefehlserzeugungsvorrichtung 84 durchgeführte Berechnung zirkulär. Das heißt, es wird eine Schleife ”(beschränkter) Drehmomentbefehl τ0* → (δ-Achsenstrombefehlserzeugungsvorrichtung 83, δ-Achsenstrombefehlsbeschränkungsvorrichtung 85) → δ-Achsenstrombefehl Iδ* → (Magnetflussbefehlserzeugungsvorrichtung 84) → Gesamtankerverbindungs-Magnetflussbefehl Φ* → (δ-Achsenstrombefehlserzeugungsvorrichtung 83) → δ-Achsenstrombefehl Iδ*” etabliert; somit ist es, um den δ-Achsenstrombefehl Iδ* und den Gesamtankerverbindungs-Magnetflussbefehl Φ* für den eingegebenen Drehmomentbefehl τ0* zu bestimmen, erforderlich, die aus der δ-Achsenstrombefehlserzeugungsvorrichtung 83 an die Magnetflussbefehlserzeugungsvorrichtung 84 durchgeführte Berechnung auszuführen und zu konvergieren, wodurch es schwierig wird, die Berechnungsverarbeitung durchzuführen.
-
Entsprechend, wenn in einer tatsächlichen Vorrichtung die vorstehende Verarbeitung durch einen Mikroprozessor mit einem vorgegebenen Berechnungszyklus durchgeführt wird, kann es erforderlich sein, Maßnahmen zu ergreifen, wie etwa das Anheben der Stabilität der Berechnungsverarbeitung beispielsweise in solcher Weise, dass als der Gesamtankerverbindungs-Magnetflussbefehl Φ*, der durch die δ-Achsenstrombefehlserzeugungsvorrichtung 83 einzusetzen ist, das unmittelbar vorherige (ein Berechnungszyklus zuvor) Berechnungsergebnis eingesetzt wird und der derzeitige Gesamtankerverbindungs-Magnetflussbefehl Φ* basierend auf dem unter Verwendung des Befehlswertes berechneten δ-Achsenstrombefehl Iδ* berechnet wird, oder auf solche Weise, dass die Magnetflussbefehlserzeugungsvorrichtung 84 den Wert des Gesamtankerverbindungs-Magnetflussbefehls Φ* über einen angemessenen Filter ausgibt.
-
In 13 kann statt der in 14 illustrierten Steuerbefehlerzeugungsvorrichtung 82a eine später beschriebene Steuerbefehlerzeugungsvorrichtung 82b eingesetzt werden. 16 ist ein Blockdiagramm, das ein anderes Konfigurationsbeispiel der Steuerbefehlserzeugungsvorrichtung in 13 illustriert. In 16 ist die Steuerbefehlserzeugungsvorrichtung 82b auf solche Weise konfiguriert, dass sie den Gesamtankerverbindungs-Magnetflussbefehls Φ* basierend nicht auf dem δ-Achsenstrombefehl Iδ*, sondern auf dem (beschränkten) Drehmomentbefehl τ0* erzeugt.
-
Eine Magnetflussbefehlserzeugungsvorrichtung 84a in 16 gibt einen optimalen Gesamtankerverbindungs-Magnetflussbefehl Φ* in Reaktion auf den eingegebenen (beschränkend) Drehmomentbefehl Φ* aus. Beispielsweise durch Umwandeln der Absätze des Graphen in 15 in den Drehmomentbefehl unter Verwendung der Gleichung (21) unten, kann der Gesamtankerverbindungs-Magnetflussbefehl Φ* für den eingegebenen (beschränkten) Drehmomentbefehl τ0* erhalten werden. τ0* = Pm·Φ*·Iδ* (21)
-
17 ist ein konzeptionelles Diagramm zum Erläutern der Beziehung zwischen dem Drehmomentbefehl τ0* und dem Magnetflussbefehl Φ* in der Magnetflusserzeugungsvorrichtung in 16 und repräsentiert ein Beispiel der Beziehung zwischen dem (beschränkten) Drehmomentfehl τ0* und dem Gesamtankerverbindungs-Magnetflussbefehl Φ*, der basierend auf 15 erhalten wird. Die Magnetflussbefehlserzeugungsvorrichtung 84b speichert vorläufig die Beziehung als eine Gleichung oder Datentabelle in der Magnetflussbefehlserzeugungsvorrichtung 84a und gibt dann einen optimalen Gesamtankerverbindungsmagnetfluss Φ* gemäß dem eingegebenen Drehmomentbefehl τ0* aus. Die Operationen der δ-Achsenstrom-Befehlserzeugungsvorrichtung 83 und der δ-Achsenstrom-Befehlsbeschränkungsvorrichtung 85 in der Steuerbefehlserzeugungsvorrichtung 82b sind die gleichen, wie jene in der Steuerbefehlserzeugungsvorrichtung 82a.
-
Weiterhin, um die Steuerbefehlserzeugungsvorrichtungen 82a und 82b zu optimieren, ist es nur notwendig, den Gesamtankerverbindungs-Magnetflussbefehl Φ* zu erzeugen, für den der Spannungsbeschränkungswert berücksichtigt worden ist, der durch die Spezifikation der elektrischen Stromwandlungseinheit 2 beschränkt ist.
-
In der elektrischen Stromwandlungseinheit
2 existiert ein ausgabefähiger Spannungsmaximalwert Vmax (umgewandelt in einen Effektivwert), der von der Spezifikation der elektrischen Stromwandlungseinheit
2 und der Ausgangsspannung Vpn der Stromquelle
12 abhängt; es ist wünschenswert, dass der Gesamtankerverbindungs-Magnetflussbefehl Φ* auf solche Weise beschränkt ist, dass die im Anker der Synchronmaschine
1 erzeugte Induktionsspannung reduziert wird, um gleich oder niedriger als Vmax zu sein. Die Induktionsspannung wird durch das Multiplikationsprodukt der Drehzahl ω der Synchronmaschine
1 und des Gesamtankerverbindungs-Magnetfluss Φ bestimmt, wenn der Spannungsabfall ein Widerstand R der Synchronmaschine
1 vernachlässigt wird; somit ist es angemessener, dass basierend auf dem ausgabefähigen Spannungsmaximalwert Vmax der elektrischen Stromwandlungseinheit
2 der Magnetflussmaximalwert Φmax entsprechend der Drehzahl ω der Synchronmaschine
1 sequentiell über die Gleichung (22) unten berechnet wird und der durch Beschränken der Ausgabe der Magnetflussbefehlserzeugungsvorrichtung
84 (
84a) mit Φmax erhaltene Wert als der Gesamtankerverbindungs-Magnetflussbefehl Φ* angenommen wird.
- ΔV
- = Steuergrenzwertspannung
-
In der Synchronmaschinensteuervorrichtung gemäß der dritten Ausführungsform der vorliegenden Erfindung, wie es der Fall ist, bei dem, wenn die Temperatur der Synchronmaschine 1, die einen Magnetfeld-Permanentmagneten aufweist, ansteigt, der Drehmomentbefehl so beschränkt ist, dass die Temperatur daran gehindert wird, anzusteigen, wird der Anstieg beim Ankerstrom (Effektivwert) beschränkt; daher wird eine Wirkung gezeigt, dass die irreversible Demagnetisierung verhindert werden kann, und der Ankerstrom der Synchronmaschine 1, der durch die Leistung der elektrischen Stromwandlungseinheit 2 beschränkt ist, reduziert werden kann, um gleich oder kleiner dem Beschränkungswert zu sein.
-
Ausführungsform 4
-
Als nächstes wird eine Synchronmaschinensteuervorrichtung gemäß der vierten Ausführungsform der vorliegenden Erfindung erläutert. In einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung wird die in 4 illustrierte Magnettemperaturschätzvorrichtung 71 in der Synchronmaschinensteuervorrichtung gemäß Ausführungsform 1 durch eine Magnettemperaturschätzvorrichtung 71b, die später beschrieben wird, ersetzt, und wird die in 9 illustrierte Magnettemperaturschätzvorrichtung 71a in der Synchronmaschinensteuervorrichtung gemäß Ausführungsform 2 durch eine später beschriebene Magnettemperaturschätzvorrichtung 71c ersetzt.
-
18 ist ein Satz von Konfigurationsdiagrammen, die ein Beispiel der Konfiguration der Magnettemperaturschätzvorrichtung in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung repräsentiert; 18 repräsentiert die Konfiguration der Magnettemperaturschätzvorrichtung 71b zu einer Zeit, als die in Ausführungsform 1 erläuterten Steuerbefehle die d-q-Achsensteuerbefehle Id* und Iq* gegeben werden. 19 ist ein Satz von Konfigurationsdiagrammen, die ein anderes Beispiel der Konfiguration einer Magnettemperaturschätzvorrichtung in einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung repräsentieren; 19 repräsentiert die Magnettemperaturschätzvorrichtung 71c zu einer Zeit, wenn als die in Ausführungsform 2 erläuterten Steuerbefehle der δ-Achsenstrombefehls Iδ* und der Gesamtankerverbindungs-Magnetflussbefehl Φ* gegeben werden.
-
Die Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung ist dadurch gekennzeichnet, dass sie sowohl in der Magnettemperaturschätzvorrichtung 71b in 18 als auch der Magnettemperaturschätzvorrichtung 71c in 19 Magnetbedingungsreferenzeinheiten (Diagramme 72a bis 72c in 18 und Diagramme 72d bis 72f in 19) enthalten, die ein Kennfeld oder eine Gleichung aufweisen, welche die Korrelation zwischen dem γ-δ-Achsenstrom und der Permanentmagnet-Temperatur (Magnetfluss) für jede aus der Mehrzahl von Kombinationen von Steuerbefehlen aufweisen, d. h. die d-q-Achsenstrombefehle Id* und Iq* oder eine Mehrzahl von Kombinationen des δ-Achsenstrombefehls Iδ* und des Gesamtankerverbindungs-Magnetflussbefehl Φ*.
-
Eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung wird unter Bezugnahme auf die Magnettemperaturschätzvorrichtung 71c in 18 erläutert. Beispielsweise wird eine Mehrzahl von Kombinationen ((Id*, Iq*) = (Id1, Iq1), (Id2, Iq2), (Id3, Iq3), (Id4, Iq4) ...) der d-q-Achsenstrombefehle Id* und Iq* vorläufig eingestellt und für jede der Befehlskombinationen wird eine Mehrzahl von Magnetbedingungsreferenzeinheiten 72 vorbereitet, in denen ein Kennfeld oder eine Gleichung, welche die Beziehung zwischen den γ-Achsenstrom Iγ (oder dem δ-Achsenstrom Iδ) und der Permanentmagnettemperatur (Schätzwert) Tmag anzeigt, die durch einen Temperaturanstieg verursacht wird, gespeichert sind. Im in 18 repräsentierten Beispiel bezieht sich die Magnetbedingungsreferenzeinheit 72a auf (Id*, Iq*) = (0 [A], 200 [A]); bezieht sich die Magnetbedingungsreferenzeinheit 72b auf (Id*, Iq*) = (0 [A], 400 [A]); bezieht sich die Magnetbedingungsreferenzeinheit 72c auf (Id*, Iq*) = (0 [A], 600 [A]). Für jede der anderen Steuerbefehlsbedingungen werden zwei oder mehr ähnliche Magnetbedingungsreferenzeinheiten vorbereitet.
-
Wie oben beschrieben, wird das vorstehende Kennfeld oder die Gleichung unter Verwendung von Charakteristikdaten auf der Synchronmaschine 1 vorläufig erhalten, wenn die Charakteristika (wie etwa eine Induktionsänderung und eine magnetische Demagnetisierungscharakteristik) der Synchronmaschine 1 über eine Analyse oder dergleichen bekannt sind; wenn unbekannt, ist es nur notwendig, die Charakteristikdaten durch eine tatsächliche Messung zu erhalten.
-
Wenn die d-q-Achsenstrombefehle Id* und Iq* zu einer Zeit, wenn die Synchronmaschine angetrieben wird, angemessen mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in jeder der Mehrzahl von Magnetbedingungsreferenzeinheiten 72 koinzidieren (bei der Bestimmung der Koinzidenz wird eine gewisse Marge gegeben), gibt die Magnettemperaturschätzvorrichtung 71b den Permanentmagnettemperaturschätzwert Tmag durch Bezugnahme auf das Kennfeld oder die Gleichung der Magnetbedingungsreferenzeinheit 72, in welcher die Steuerbefehlsbedingungen den γ-Achsenstrom Iγ oder den δ-Achsenstrom Iδ enthalten, aus.
-
Als nächstes wird eine Synchronmaschinensteuervorrichtung gemäß der vierten Ausführungsform der vorliegenden Erfindung unter Bezugnahme auf die Magnettemperaturschätzvorrichtung 71c in 19 erläutert. Beispielsweise wird eine Mehrzahl von Kombinationen ((Iδ*, Φ*) = (Iδ1, Φ1), (Iδ2, Φ2), (Iδ3, Φ3), (Iδ4, Φ4)) des δ-Achsenstrombefehls Id* und des Gesamtankerverbindungs-Magnetflussbefehl Φ* vorläufig eingestellt und werden für jede aus den Befehlskombinationen eine Mehrzahl von Magnetbedingungsreferenzeinheiten 72 vorbereitet, in denen ein Kennfeld oder eine Gleichung, welche die Beziehung zwischen dem γ-Achsenstorm Iγ und der Permanentmagnettemperatur (Schätzwert) Tmag anzeigen, welche durch einen Temperaturanstieg verursacht wird, gespeichert sind. Im in 19 repräsentierten Beispiel bezieht sich die Magnetbedingungsreferenzeinheit 72d auf (Iδ*, Φ*) = (0.05 [Wb], 100 [A]); bezieht sich die Magnetbedingungsreferenzeinheit 72e auf (Iδ*, Φ*) = (0.05 [Wb], 200 [A]); bezieht sich die Magnetbedingungsreferenzeinheit 72f auf (Iδ*, Φ*) = (0.05 [Wb], 300 [A]). Für alle anderen Steuerbefehlsbedingungen werden ähnliche Magnetbedingungsreferenzeinheiten vorbereitet.
-
Wenn der Steuerbefehl (Iδ*, Φ*) zu einer Zeit, wenn die Synchronmaschine angetrieben wird, mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in jeder der Mehrzahl von Magnetbedingungsreferenzeinheiten 72 annähernd koinzidiert, gibt die Magnettemperaturschätzvorrichtung 71c den Permanentmagnet-Temperaturschätzwert Tmag unter Bezugnahme auf das Kennfeld oder die Gleichung in der Magnetbedingungsreferenzeinheit 72, in welcher die Steuerbefehlsbedingungen den γ-Achsenstrom Iγ oder den δ-Achsenstrom Iδ enthalten, aus.
-
In dem Fall, bei dem Steuerbefehle zu einer Zeit, wenn die Synchronmaschine 1 angetrieben wird, nicht mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in allen einer Mehrzahl von Magnetbedingungsreferenzeinheiten 72 koinzidieren, ist es nur notwendig, eine Verarbeitung durchzuführen, in welcher beispielsweise die Permanentmagnet-Temperaturschätzoperation nicht implementiert ist, und der Temperaturschätzwert der unmittelbar vorherigen Temperaturschätzoperation gehalten und ausgegeben wird als der Permanentmagnet-Temperaturschätzwert Tmag. In dem Fall, bei dem eine solche Verarbeitung durchgeführt wird, wird die Permanentmagnet-Temperaturschätzoperation intermittent implementiert.
-
Zusätzlich, wie oben beschrieben, gibt es eine Korrelation zwischen dem Permanentmagnet-Temperaturschätzwert Tmag und dem Permanentmagnet-Magnetflussschätzwert Φmag; daher versteht es sich, dass basierend auf der Korrelation der Permanentmagnet-Magnetflussschätzwert Φmag geschätzt werden kann. In dieser Hinsicht steigt jedoch in dem Fall, bei dem die Magnetbedingungsreferenzeinheiten 72 für alle einer Mehrzahl von Steuerbefehlen vorbereitet sind, die Wahrscheinlichkeit, dass die Steuerbefehle zu der Zeit, wenn die Synchronmaschine 1 angetrieben wird, mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 koinzidieren, proportional zur Anzahl der Magnetbedingungsreferenzeinheiten an; somit kann, obwohl es möglich wird, die Permanentmagnet-Temperatur (Magnetfluss) häufig abzuschätzen, selbst wenn sich der Steuerbefehl ändert, die Wirkung der vorliegenden Erfindung, d. h. dass die Abschätzung mit weniger Kennfelddatenstücken durchgeführt werden kann, reduziert werden.
-
Daher ist eine angemessene Einstellung für den Zweck erforderlich, zu verhindern, dass die Anzahl von Steuerbefehlsbedingungen extrem ansteigt, wenn die Magnetbedingungsreferenzeinheiten 72 vorbereitet werden. Es ist bereits beschrieben worden, dass, wenn der Ankerstrom (Effektivwert) der Synchronmaschine 1 ansteigt, die Temperatur der Gesamt-Synchronmaschine 1 einschließlich des Permanentmagnet auch ansteigt, aufgrund der in der Synchronmaschine 1 erzeugten Wärme (wie etwa die im Widerstand der Ankerwicklung erzeugte Wärme), wodurch die Demagnetisierung des Permanentmagnet erleichtert wird; mit anderen Worten ist es vorstellbar, dass soweit wie der Ankerstrom (Effektivwert) der Synchronmaschine 1 klein ist, der Temperaturanstieg in der Synchronmaschine 1 klein ist und daher die Demagnetisierung des Permanentmagneten nicht erleichtert ist, d. h. die Notwendigkeit des Schätzens der Permanentmagnet-Temperatur (Magnetfluss) klein ist.
-
Somit kann die Steuerbefehlsbedingung zum Bereitstellen eines Kennfelds oder einer Gleichung, welche die Korrelation zwischen dem γ-δ-Achsenstrom und der Permanentmagnet-Temperatur (Magnetfluss) in der Magnetbedingungsreferenzeinheit 72 repräsentiert, mit einem vorgegebenen Stromwert oder größer definiert werden. 20 ist ein erläuterndes Diagramm, das ein Beispiel repräsentiert, in dem eine Steuerbefehlsbedingung gezeigt wird, um ein Kennfeld oder eine Gleichung bereitzustellen, welche die Korrelation zwischen dem γ-δ-Achsenstrom und der Permanentmagnet-Temperatur (Magnetfluss) in einer Magnetbedingungsreferenzeinheit einer Synchronmaschinensteuervorrichtung gemäß der vierten Ausführungsform der vorliegenden Erfindung repräsentiert.
-
In 20 repräsentiert der äußere Strichlinienkreis den Strombegrenzungswert Imax und repräsentiert der innere Strichlinienkreis die Maximalstrombedingung I1 zum Abschätzen der Permanentmagnet-Temperatur (Magnetfluss); die Schwarzkreis-Markierungen, die in dem durch die zwei Kreise umgebenen Bereiche angeordnet sind, sind Steuerbefehlsbedingungen zum Bereitstellen einer Karte oder einer Gleichung, welche die Korrelation zwischen dem γ-δ-Achsenstrom und der Permanentmagnet-Temperatur (Magnetfluss) in der Magnetbedingungsreferenzeinheit 72 anzeigt. Ein positiver d-Achsenstrom wird nicht häufig an die Synchronmaschine 1, die einen Magnetfeld-Permanentmagneten aufweist, angelegt; daher, um die Kartendaten zu vermindern, werden die Schwarzkreis-Markierungen nur in dem Bereich vorgesehen, in dem der d-Achsenstrom negativ ist.
-
20 ist nur ein Beispiel; daher ist es nicht notwendigerweise erforderlich, dass, wie in 20 repräsentiert, die durch die vorstehenden schwarzkreisigen Markierungen repräsentierten Bedingungen gleichmäßig voneinander beabstandet sind; in dem Fall, bei dem, wenn die Synchronmaschine 1 angetrieben wird, nur spezifische Steuerbefehle vorgesehen sind, ist es nur notwendig, die vorstehenden Schwarzkreis-Markierungen gemäß der Steuerbefehle einzustellen.
-
Es ist ein Beispiel beschrieben worden, in welchem in dem Fall, bei dem die Steuerbefehle zur Zeit, wenn die Synchronmaschine 1 angetrieben wird, nicht mit den vorläufig vorbereiteten Steuerbefehlsbedingungen den Magnetbedingungsreferenzeinheiten 72 übereinstimmen, die Permanentmagnet-Temperaturschätzoperation nicht durchgeführt wird, d. h. die Permanentmagnettemperaturschätzoperation intermittent durchgeführt wird; jedoch in diesem Fall kann es sein, dass die Permanentmagnet-Temperaturschätzoperation über einen langen Zeitraum nicht durchgeführt wird, wenn die Synchronmaschine 1 angetrieben wird. Diese Besorgnis berücksichtigend, kann gestattet werden, dass die Steuerbefehle zu der Zeit, wenn die Synchronmaschine 1 angetrieben wird, gezwungen werden, für jeden vorgegebenen Zeitraum mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 zu koinzidieren, so dass die Permanentmagnet-Temperaturschätzoperation ohne Versagen in Schritten vorgegebener Zeiträume durchgeführt wird.
-
Auf eine solche Weise wie oben beschrieben, kann die Situation verhindert werden, in der die Permanentmagnet-Temperaturschätzoperation über einen langen Zeitraum nicht durchgeführt wird, wenn die Synchronmaschine 1 angetrieben wird. In dieser Hinsicht jedoch, wenn die Steuerbefehle zu einer Zeit, wenn die Synchronmaschine 1 angetrieben wird, gezwungen werden, in jedem vorgegebenen Zeitraum, mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 zu koinzidieren, ist es erforderlich, eine Änderung bei der Drehmomentabgabe der Synchronmaschine 1 zu reduzieren.
-
Wie oben beschrieben, wird im Falle einer Synchronmaschine 1, die einen Magnetfeld-Permanentmagneten aufweist, durch Verwenden der Tatsache, dass zahlreiche Kombinationen der d-Achsenströme Id und des q-Achsenstroms Iq oder zahlreiche Kombinationen des Gesamtankerverbindungs-Magnetflusses Φ und des δ-Achsenstroms Iδ existieren, die ein und dasselbe Drehmoment erzeugen können, eine Verarbeitung zum Auswählen einer Kombination von Steuerbefehlen durchgeführt, mit der das Drehmoment zu einer Zeit, wenn die Steuerbefehle nicht geändert worden sind und das Drehmoment zu einer Zeit, wenn die Steuerbefehle geändert worden sind, sich nicht sehr voneinander unterscheiden, und die mit den Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 so koinzidieren, dass die Drehmomentabgabe der Synchronmaschine 1 unterdrückt wird, sich zu ändern.
-
Die Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung ist dadurch gekennzeichnet, dass sie gegenüber dem Effekt der Spannungsabgabegenauigkeit (zum Beispiel einen durch die Totzeit des Wechselrichters verursachten Spannungsfehlers) der elektrischen Stromwandlungseinheit 2 im Vergleich zu einer konventionellen Technologie unempfindlich ist, weil die Permanentmagnet-Temperatur (Magnetfluss) direkt unter Verwendung des γ-Achsenstrom Iγ und δ-Achsenstrom Iδ anstelle der Spannungsinformation abgeschätzt wird. Wenn jedoch die d-Achsenkomponente Φd und die q-Achsenkomponente Φq des Gesamtankerverbindungs-Magnetflusses Φ unter Verwendung der d-q-Achsenspannungsbefehle Vd* und Vq* abgeschätzt wird, und dann die Größe |Φ| und die Phase ∠Φ des Gesamtankerverbindungs-Magnetfluss Φ basierend auf den Gleichungen (10) und (11) erhalten werden, wird Spannungsinformation eingesetzt; daher erfährt im Niedergeschwindigkeitsbereich, wo die Spannung niedrig wird, die Synchronmaschinensteuervorrichtung etwas die Spannungsabgabegenauigkeit der elektrischen Stromwandlungseinheit 2. Entsprechend ist der vorstehende Effekt in der Niedergeschwindigkeitszone der Genauigkeit beim Abschätzen des Gesamtankerverbindungsmagnetflusses und der Genauigkeit bei der Koordinatenumwandlung des Ankerstroms vorgesehen, welche die Abschätzgenauigkeit unterläuft, in die Ströme auf der γ-Achse und der δ-Achse; somit kann die Spannungsausgabegenauigkeit eine Wirkung auf die Genauigkeit bei der Abschätzung der Permanentmagnet-Temperatur (Magnetfluss) zeigen.
-
Im Falle einer Anwendung, bei der die Synchronmaschine 1 durch ihr eigenes Drehmoment beschleunigt wird im Betrieb, in dem die Energetisierung gestartet wird, wenn die Geschwindigkeit 0 ist und dann das Drehmoment erzeugt wird, passiert die Geschwindigkeit in vielen Fällen eine Geschwindigkeitszone, in welcher die Spannungsgenauigkeit wahrscheinlich einen Effekt gibt, bevor die durch einen Temperaturanstieg verursachte Demagnetisierung einen Effekt gibt; es ist vorstellbar, dass bei dieser Art von Anwendung die Notwendigkeit einer Abschätzung der Permanentmagnet-Temperatur (Magnetfluss) in der Niedergeschwindigkeitszone klein ist.
-
Somit kann die Permanentmagnet-Temperatur (Magnetfluss) Abschätzoperation darauf beschränkt sein, nur dann durchgeführt zu werden, wenn die Drehzahl ω der Synchronmaschine 1 auf einer vorgegebenen Geschwindigkeit oder höher ist. 21 ist ein erläuterndes Diagramm, das eine Geschwindigkeitszone zum Abschätzen der Permanentmagnet-Temperatur (Magnetfluss) in einer Synchronmaschinensteuervorrichtung gemäß der vierten Ausführungsform der vorliegenden Erfindung repräsentiert; in der Zone (im Bereich von -ω1 bis ω1, wenn die negative Geschwindigkeit berücksichtigt wird), bei der die Drehzahl eine vorgegebene Zahl ω1 oder niedriger ist und die Spannungsgenauigkeit einen Effekt geben kann, wird die Permanentmagnet-Temperatur (Magnetfluss) Abschätzoperation selbst dann nicht durchgeführt, wenn die Steuerbefehle zu einer Zeit, an dem die Synchronmaschine angetrieben wird, mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 koinzidieren. Auf eine solche Weise wie oben beschrieben, wird die Permanentmagnet-Temperatur (Magnetfluss) Abschätzoperation nur in der Hochgeschwindigkeitszone durchgeführt, wo die Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit höher wird; somit wird ein Effekt gezeigt, dass die Abschätzgenauigkeit erhöht ist.
-
In der vorstehenden Synchronmaschinensteuervorrichtung gemäß Ausführungsform 4 der vorliegenden Erfindung werden die Magnetbedingungsreferenzeinheiten 72 für jeden einer Mehrzahl von Steuerbefehlen vorbereitet; daher, weil die Wahrscheinlichkeit, dass die Steuerbefehle zur Zeit, wenn die Synchronmaschine angetrieben wird, mit den vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 koinzidieren, ansteigt, wird ein Effekt demonstriert, dass selbst wenn sich der Steuerbefehl sequentiell ändert, die Änderung beim Steuerbefehl verfolgt wird und die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt werden kann.
-
Außerdem wird ein Effekt demonstriert, dass, weil die Steuerbefehlsbedingung zum Bereitstellen eines Kennfelds oder einer Gleichung, welche die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur (Magnetfluss) auf eine Stromzone begrenzt ist, wo die Abschätzung erforderlich ist, die Konfiguration der Magnetbedingungsreferenzeinheit vereinfacht werden kann.
-
Weiterhin werden die Steuerbefehle zu einer Zeit, wenn die Synchronmaschine 1 angetrieben wird, gezwungen, in jedem vorgegebenen Zeitraum mit vorläufig vorbereiteten Steuerbefehlsbedingungen in den Magnetbedingungsreferenzeinheiten 72 zu koinzidieren, so dass die Permanentmagnettemperaturabschätzoperation ohne Versagen in Schritten einer vorgegebenen Periode durchgeführt wird; somit wird ein Effekt demonstriert, dass durch Durchführen der Permanentmagnet-Temperatur (Magnetfluss) Abschätzung in jedem vorgegebenen Zeitraum die Abschätzoperation daran gehindert werden kann, über einen langen Zeitraum nicht durchgeführt zu werden.
-
Noch weiterhin, weil die Permanentmagnet-Temperatur (Magnetfluss) Abschätzoperation nur in der Hochgeschwindigkeitszone durchgeführt wird, wo die Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit höher wird, wird die Temperatur (Magnetfluss) nur abgeschätzt, wenn die Genauigkeit beim Abschätzen des Gesamtankerverbindungsmagnetflusses basierend auf dem Spannungsbefehl extrem hoch ist, oder nur, wenn die Genauigkeit bei der Koordinatenkonvertierung des Ankerstroms, der die bevorstehende Abschätzgenauigkeit unterläuft, in dem γ-Achsenstrom und dem δ-Achsenstrom extrem hoch ist. Somit wird ein Effekt demonstriert, dass die Abschätzgenauigkeit erhöht wird.
-
Ausführungsform 5
-
Als nächstes wird eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 5 der vorliegenden Erfindung erläutert. In einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 5 der vorliegenden Erfindung wird zusätzlich zum Modus, in dem wie in Ausführungsform 1 bis 4 beschreiben, die Permanentmagnet-Temperatur (Magnetfluss) basierend auf den Steuerbefehlen und den γ-δ-Achsenströmen abgeschätzt wird, ein Modus bereitgestellt, in welchem die Steuerbefehle auf solche Weise eingestellt werden, dass der Ankerstrom der Synchronmaschine 1 zu 0 wird und dann die Permanentmagnet-Temperatur (Magnetfluss) basierend auf den Gesamtankerverbindungs-Magnetfluss Φ abgeschätzt wird, der abgeschätzt worden ist, als der Ankerstrom eingestellt worden ist. Das in den Ausführungsformen 1 bis 4 beschriebene Verfahren des Abschätzens der Permanentmagnet-Temperatur (Magnetfluss) basierend auf den γ-δ-Achsenströmen ist ein Verfahren unter der Annahme, dass irgendeine Art von Strom in der Ankerwicklung der Synchronmaschine 1 fließt; daher, wenn der Ankerstrom der Synchronmaschine 1 0 ist, kann die Permanentmagnet-Temperatur (Magnetfluss) nicht abgeschätzt werden. Entsprechend, um die Permanentmagnet-Temperatur (Magnetfluss) abzuschätzen, ist es erforderlich, einen unnötigen Strom an die Ankerwicklung anzulegen; somit kann der Fluss unnötigen Stroms unnötiges Drehmoment verursachen oder die Temperatur des Permanentmagneten erhöhen.
-
Die vorstehenden Probleme berücksichtigend, wird zusätzlich zum Modus, in dem, wie in den Ausführungsformen 1 bis 4 beschrieben, die Permanentmagnet-Temperatur (Magnetfluss) basierend auf den γ-δ-Achsenströmen geschätzt wird, ein Modus hinzugefügt, in welchem die Steuerbefehle auf solche Weise eingestellt werden, dass der Ankerstrom der Synchronmaschine 1 0 wird und dann die Permanentmagnet-Temperatur (Magnetfluss) basierend auf dem Gesamtankerverbindungs-Magnetfluss Φ geschätzt wird, der geschätzt worden ist, als der Ankerstrom eingestellt worden ist, so dass die Permanentmagnet-Temperatur (Magnetfluss) geschätzt werden kann, wenn die Energetisierung nicht implementiert ist, ohne irgendeinen unnötigen Strom an die Ankerwicklung anzulegen.
-
22 ist ein Vektordiagramm zu einer Zeit, wenn eine Synchronmaschine, die einen Magnetfeld-Permanentmagneten aufweist, nicht energetisiert ist, in einer Synchronmachinensteuervorrichtung gemäß der fünften Ausführungsform der vorliegenden Erfindung. Wenn die Synchronmaschine nicht energetisiert ist, bildet nur der Permanentmagnet-Magnetfluss Φm einen Magnetfluss, der in dem Ankerverbindungs-Magnetfluss enthalten ist; daher koinzidieren der Gesamtankerverbindungs-Magnetfluss Φ und der Permanentmagnet-Magnetfluss Φm miteinander. Zusätzlich erzeugt nur die durch den Permanentmagnet-Magnetfluss Φm verursachte Induktionsspannung die Spannung an der Synchronmaschine 1; daher werden die d-q-Achsenspannungen Vd und Vq zu einer Zeit, wenn die Synchronmaschine nicht energetisiert ist, durch die Gleichung (23) unten erhalten. Vd = 0 Vq = ω·Φ = ω·Φm (23)
-
Wenn die vorstehenden Steuerbefehle auf solche Weise eingestellt sind, dass der Ankerstrom in der Synchronmaschine 1 0 wird, d. h. wenn als die Befehlssignale die d-q-Achsenstrombefehle Id* und Iq* auf 0 eingestellt werden, wird eine Justierung auf solche Weise durchgeführt, dass die d-q-Achsenspannungen Vd und Vq und die d-q-Achsenspannungsbefehle Vd* und Vq* miteinander koinzidieren; somit wird basierend auf der Gleichung (24) unten der Gesamtankerverbindungs-Magnetfluss Φ (dessen Wert der Permanentmagnet-Magnetflussschätzwert Φmag ist) aus dem q-Achsenspannungsbefehl Vq* erhalten. Φmag = Φ = Vq* / ω (24)
-
Es versteht sich, dass es möglich gemacht wird, Φmag in Tmag umzuwandeln, basierend auf Gleichung (9), welche die Beziehung zwischen dem Permanentmagnettemperatur Tmag und dem Permanentmagnet-Magnetflussschätzwert Φmag repräsentiert.
-
In einem Fall, wo als die Steuerbefehle der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der δ-Achsenstrombefehls Iδ* vorgesehen sind, wird der Ankerstrom der Synchronmaschine 1 durch die Stromdetektionseinheit 3 überwacht, während beispielweise der Gesamtankerverbindungs-Magnetflussbefehl Φ* auf einen vorgegebenen Permanentmagnet-Magnetfluss-Wert, wie etwa einen Referenzwert eingestellt wird und der δ-Achsenstrombefehls Iδ* auf 0 eingestellt wird; der Gesamtankerverbindungs-Magnetflussbefehl Φ* wird auf solche Weise justiert, dass der Ankerstrom 0 wird; dann entspricht der Gesamtankerverbindungs-Magnetflussbefehl Φ* zu einer Zeit, wenn der Ankerstrom 0 ist und keine Energetisierung durchgeführt wird, dem Permanentmagnet-Magnetflussschätzwert Φmag. In diesem Fall, obwohl der Ankerstrom im Prozess des Justierens des Gesamtankerverbindungs-Magnetflussbefehl Φ* fließen kann, fließt kein unnötiger Strom in der Ankerwicklung während der Abschätzung des Permanentmagnet-Magnetflusses.
-
Die Konfiguration von Ausführungsform 5 kann zu irgendeiner der Ausführungsformen 1 bis 4 hinzugefügt werden.
-
Die vorstehende Synchronmaschinensteuervorrichtung gemäß Ausführungsform 5 der vorliegenden Erfindung kann einen Effekt demonstrieren, dass die Permanentmagnet-Temperatur (Magnetfluss) selbst während dem Nicht-Energetisierungszeitraum, in welchem die γ-δ-Achsenströme nicht erzeugt werden, abgeschätzt werden kann.
-
Ausführungsform 6
-
Als nächstes wird eine Synchronmaschinensteuervorrichtung gemäß Ausführungsform 6 der vorliegenden Erfindung erläutert. In einer Synchronmaschinensteuervorrichtung gemäß Ausführungsform 6 der vorliegenden Erfindung wird in sowohl Ausführungsform 2 als auch 3 der δ-Achsenstrombefehls Iδ* auf „0” eingestellt, d. h. [Iδ = 0] wird für den Zweck des Steuerns des δ-Achsenstroms auf 0 bereitgestellt, so dass die Synchronmaschine entladen wird, und es wird der Gesamtankerverbindungs-Magnetflussbefehl Φ* bereitgestellt, mit dem die in der im Anker der Synchronmaschine 1 erzeugte Induktionsspannung gleich oder niedriger als die ausgabefähige Spannung der elektrischen Stromwandlungseinheit 2 wird.
-
In diesem Fall, basierend auf Gleichung (22), muss der Gesamtankerverbindungs-Magnetflussbefehl Φ* in solcher Weise eingestellt werden, dass er innerhalb des durch die Gleichung (25) unten repräsentierten Bereichs fällt. Φ* ≤ Φmax = Vmax – R·Iδ* – ΔV / ω ≅ Vmax – ΔV / ω (25)
-
Um diese Steuerbefehle bereitzustellen, kann es gestattet sein, dass wie in 7 von Ausführungsform 2 illustriert, der δ-Achsenstrombefehls Iδ* und der Gesamtankerverbindungs-Magnetflussbefehl Φ*, die der vorstehenden Gleichung genügen, direkt gegeben werden oder [Iδ* = 0] durch eine Berechnung erhalten wird, die auf Gleichung (18) basiert, in dem der Drehmomentbefehl τ* in 13 von Ausführungsform 3 auf „0” (in der Praxis τ0* = 0) eingestellt wird, und dann die Magnetfluss Befehlserzeugungsvorrichtung 84 Φ* bereitstellt, der der Gleichung (25) genügt.
-
23 ist ein Satz von Vektordiagrammen zu einer Zeit, wenn der δ-Achsenstrom auf 0 gesteuert wird, in einer Synchronmaschine gemäß Ausführungsform 6 der vorliegenden Erfindung; 23 ist ein Satz erläuternder Diagramme, welche den Unterschied zwischen einem Vektordiagramm bei einer Referenzbedingung und einem Vektordiagramm zu einer Zeit, wenn eine Demagnetisierung unter gegebenen Bedingungen des Gesamtankerverbindungs-Magnetflussbefehls Φ* und des δ-Achsenstrombefehls Iδ* verursacht wird (Φ* < Φmax, Iδ* = 0). 23A ist ein Vektordiagramm zu einer Zeit, wenn der Permanentmagnet in dem Referenz-(unbelasteten)Zustand ist, d. h. keine Demagnetisierung im Permanentmagnet verursacht wird; 23B ist ein Vektordiagramm zu einer Zeit, wenn der Magnetfluss um einen Betrag entsprechend einer Demagnetisierung des Permanentmagneten abnimmt, die aufgrund eines Temperaturanstiegs in der Synchronmaschine 1 verursacht wird, d. h. um ΔΦmag, wenn der Permanentmagnet in einem stabilen Zustand ist, wo die Größe |Φ| eines Gesamtankerverbindungsmagnetflusses und des δ-Achsenstroms Iδ unter der Annahme konstant sind, dass der Gesamtankerverbindungs-Magnetflussbefehl Φ* (≦ Φmax) und der δ-Achsenstrombefehl Iδ* (= 0), die vorgegebene Steuerbefehle sind, konstant sind, d. h. gewünscht kontrolliert.
-
In 23 fließt der δ-Achsenstrom Iδ nicht und fließt nur der γ-Achsenstrom Iγ, alle Vektoren des Permanentmagnet-Magnetfluss Φm, der Ankerreaktions-Magnetfluss Φa, der durch im γ-Achsenstrom Iγ erzeugt ist, und der Gesamtankerverbindungs-Magnetfluss Φ liegen auf einer einzelnen und derselben Achse; die γ-Achse wird gleich zur d-Achse und die δ-Achse wird gleich zur q-Achse. D. h., Φa = Lγ·Iγ = Ld·Id. 23 repräsentiert ein Beispiel, bei dem ein Ankerreaktions-Magnetfluss Φa ausgeübt wird, um den Permanentmagnet-Magnetfluss Φm abzuschwächen; in diesem Fall, wenn die Demagnetisierung des Permanentmagneten verursacht wird, wird der Ankerreaktionsmagnetfluss Φa, der ausgeübt wird, um den Permanentmagnet-Magnetfluss Φm abzuschwächen, um den Abfall ΔΦmag im Permanentmagnet-Magnetfluss reduziert, solange wie der Gesamtankerverbindungs-Magnetfluss Φ gesteuert wird, auf einem vorgegebenen Konstantwert zu liegen; als ein Ergebnis, wenn eine Änderung bei der γ-Achseninduktion Lγ kaum einen Effekt bereitstellt, wird auch der (Absolutwert des) γ-Achsenstroms Iγ klein.
-
Wenn andererseits der Ankerreaktions-Magnetfluss Φa ausgeübt wird, um den Permanentmagnet-Magnetfluss Φm zu verstärken, wird die Abnahme ΔΦmag im Permanentmagnet-Magnetfluss durch einen Anstieg beim Ankerreaktions-Magnetfluss Φa kompensiert; als Ergebnis wird der (Absolutwert des) γ-Achsenstrom |Iγ| groß. Wie oben beschrieben, wird in beiden Fällen eine Änderung zwischen der Prä-Demagnetisierungsgröße des γ-Achsenstroms Iγ und der Post-Demagnetisierungsgröße des γ-Achsenstroms Iγ verursacht; somit kann durch Verstehen der Änderung beim γ-Achsenstrom Iγ eine Änderung beim Permanentmagnet-Magnetflussschätzwert Φmag, d. h. eine Änderung bei der Permanentmagnettemperatur Tmag auch geschätzt werden können.
-
In einem Fall, bei dem, basierend auf einer Änderung beim γ-Achsenstrom Iγ, eine Änderung beim Permanentmagnet-Magnetfluss Φm oder dem Permanentmagnettemperatur Tmag erhalten wird, kann das gleiche Verfahren wie jenes, das in vorstehenden Ausführungsformen beschrieben ist, durchgeführt werden.
-
In Ausführungsform 6, weil der δ-Achsenstrom Iδ nicht dazu gebracht wird, zu fließen, und nur der γ-Achsenstrom Iγ zum Abschätzen der Permanentmagnet-Temperatur (Magnetfluss) dazu gebracht wird, zu fließen, kann die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt werden, ohne mehr Strom als erforderlich dazu zu bringen, in der Ankerwicklung zu fließen.
-
Es ist wahr, dass es die vorstehende Beschränkung ”Φ* Φmax” gibt, aber wenn der Gesamtankerverbindungs-Magnetflussbefehl Φ* auf den Wert des Permanentmagnet-Magnetfluss zu einer Zeit eingestellt wird, wenn aufgrund von Erwärmung eine Demagnetisierung verursacht wird (z. B. bei 100°C), koinzidieren der Gesamtankerverbindungs-Magnetflussbefehl Φ* und der Permanentmagnet-Magnetflussschätzwert Φmag annähernd miteinander bei ungefähr 100°C und daher wird der Ankerreaktions-Magnetfluss Φa kaum erzeugt; daher fließt der γ-Achsenstrom Iγ kaum.
-
Entsprechend kann die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt werden, ohne mehr Strom als benötigt dazu zu bringen, in der Ankerwicklung zu fließen; daher kann auch die Erwärmung oder der Verlust, die durch den γ-Achsenstrom Iγ verursacht wird, unterdrückt werden. In dem Fall, bei dem die Permanentmagnet-Temperatur so niedrig wie die Raumtemperatur ist, wenn der Gesamtankerverbindungs-Magnetflussbefehl Φ* auf den Wert des Permanentmagnet-Magnetfluss zu einer Zeit eingestellt wird, wenn die Temperatur 100°C beträgt, fließt der γ-Achsenstrom Iγ zum Erzeugen des Ankerreaktionsmagnetflusses Φa, der den Permanentmagnet-Magnetfluss Φm abschwächt; weil jedoch der δ-Achsenstrom Iδ nicht fließt, wird der Ankerstrom nicht übermäßig groß und ist die Permanentmagnettemperatur niedrig, stellt das durch den γ-Achsenstrom Iγ verursachte Erwärmen auch keinen großen Effekt dar.
-
In Ausführungsform 6 wird [Iδ* = 0] vorgesehen; daher, während die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt wird, wird kein Drehmoment in der Synchronmaschine erzeugt. Entsprechend, um die Abschätzung durchzuführen, während die Synchronmaschine 1 ihre Lasten antreibt, d. h. während das Drehmoment erzeugt wird, ist es nur notwendig, Befehle nur für eine kurze Zeit zu erteilen, um die Bedingung zu etablieren, dass Iδ* = 0 (oder τ* = 0) und Φ* ≦ Φmax, um so soweit als möglich das erzeugte Drehmoment der Synchronmaschine 1 daran zu hindern, einen Effekt zu ergeben, wenn es 0 wird.
-
24 ist ein Timing-Diagramm, das ein Beispiel des Betriebstimings zum Abschätzen des δ-Achsenstrombefehls Iδ* oder des Drehmomentbefehls τ* und der Permanentmagnet-Temperatur oder des Magnetflusses in einer Synchronmaschine gemäß Ausführungsform 6 der vorliegenden Erfindung repräsentiert. Wie in 24 repräsentiert, wird, während die Synchronmaschine 1 ihre Lasten treibt (während das Drehmoment erzeugt wird), der δ-Achsenstrombefehls Iδ* oder der Drehmomentbefehl τ* intermittent dazu gebracht, 0 zu sein und dann wird die Permanentmagnet-Temperatur (Magnetfluss) während dieses Zeitraums abgeschätzt. Auf eine solche Weise wie oben beschrieben, selbst wenn die Synchronmaschine 1 ihre Lasten antreibt, wird das erzeugte Drehmoment der Synchronmaschine 1 soweit als möglich davon abgehalten, einen Effekt zu ergeben, wenn es 0 wird, und kann die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt werden, ohne mehr Strom als notwendig in der Ankerwicklung fließen zu lassen; daher kann die Erwärmung oder der Verlust, die durch den Ankerstrom verursacht sind, während der Abschätzoperation reduziert werden.
-
Die vorstehende Synchronmaschinensteuervorrichtung gemäß der sechsten Ausführungsform der vorliegenden Erfindung kann einen Effekt dahingehend zeigen, dass die Permanentmagnet-Temperatur (Magnetfluss) abgeschätzt werden kann, ohne dass mehr Strom als notwendig dazu gebracht wird, in der Ankerwicklung zu fließen, und die Erwärmung oder den Verlust, die durch den Ankerstrom verursacht werden, kann reduziert werden. Während die Synchronmaschine 1 ihre Lasten treibt (während das Drehmoment erzeugt wird), wird der δ-Achsenstrombefehls Iδ* oder Drehmomentbefehl τ* intermittent dazu gebracht, 0 zu sein und dann wird die Permanentmagnet-Temperatur (Magnetfluss) während des Zeitraums abgeschätzt; daher wird ein Effekt gezeigt, dass selbst wenn die Synchronmaschine 1 ihre Lasten antreibt, das erzeugte Drehmoment der Synchronmaschine 1 soweit als möglich davon abgehalten wird, dass sich ein Effekt zeigt, wenn es 0 wird und es kann die Erwärmung oder der Verlust, die durch den sich auf den Abschätzbetrieb beziehenden Ankerstrom verursacht werden, reduziert werden.
-
Synchronmaschinensteuervorrichtungen gemäß der vorliegenden Erfindung, die vorstehend beschrieben sind, sind wie folgt gekennzeichnet:
- (1) Bereitgestellt werden eine elektrische Stromwandlungseinheit, die eine Spannung an eine Synchronmaschine, die einen Permanentmagneten zum Ausbilden eines Magnetflusses aufweist, ausgibt, basierend auf einem Spannungsbefehl; eine Stromdetektionseinheit, die einen Ankerstrom der Synchronmaschine detektiert; eine Spannungsbefehlsberechnungseinheit, die den Spannungsbefehl berechnet, basierend auf einem Steuerbefehl; eine Positionsdetektionseinheit, die eine Rotorposition der Synchronmaschine schätzt oder detektiert; eine Magnetfluss-Schätzvorrichtung, die eine γ-Achse, in der ein Gesamtankerverbindungsmagnetfluss der Synchronmaschine erzeugt wird, basierend auf dem Ankerstrom und/oder dem Spannungsbefehl abschätzt; und eine Magnetbedingungsabschätzeinheit, welche die Temperatur oder den Magnetfluss des Permanentmagneten abschätzt. Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Magnetbedingungsschätzeinheit den Ankerstrom in Ströme auf der γ-δ-Achse, die aus der γ-Achse und der δ-Achse, die rechtwinklig zur γ-Achse ist, besteht, basierend auf der Rotorposition und der abgeschätzten γ-Achsenkoordinaten wandelt, und die Temperatur des Magnetflusses des Permanentmagneten basierend auf dem Steuerbefehl und den γ-δ-Achsenströmen schätzt.
Die Synchronmaschinensteuervorrichtung, die auf diese Weise konfiguriert ist, macht es gemäß der vorliegenden Erfindung möglich, mit weniger Kennfelddaten eine hochgenaue Permanentmagnet-Temperatur oder einen Magnetfluss abzuschätzen, der gegenüber der Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit unsuszeptibel ist, ohne eine Temperaturdetektionsvorrichtung direkt auf dem Permanentmagnet zu montieren.
- (2) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Steuerbefehle auf der d-q-Achse liegen, die ein rotierendes bi-axiales Koordinatensystem der Synchronmaschine ist (Ausführungsform 1, 1–6).
Die Synchronmaschinensteuervorrichtung, die auf diese Weise konfiguriert ist, ermöglicht es gemäß der vorliegenden Erfindung, mit weniger Kennfelddaten eine hochgenaue Permanentmagnet-Temperatur oder einen Magnetfluss abzuschätzen, der gegenüber der Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit unsuszeptibel ist, ohne eine Temperaturdetektionsvorrichtung direkt auf dem Permanentmagnet zu montieren.
- (3) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Steuerbefehle ein δ-Achsenstrombefehl zum Steuern des δ-Achsenstroms auf einen vorbestimmten Wert und ein Gesamtankerverbindungs-Magnetfluss-Befehl zum Steuern des Gesamtankerverbindungs-Magnetflusses auf einen vorgegebenen Wert sind (Ausführungsform 2, 7 bis 11).
Die auf solche Weise konfigurierte Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ermöglicht es, mit weniger Kennfelddaten eine hochgenaue Permanentmagnet-Temperatur oder einen Magnetfluss, der gegenüber einer Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit unsuszeptibel ist, abzuschätzen, ohne eine Temperaturdetektionsvorrichtung direkt auf dem Permanentmagneten zu montieren.
- (4) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist gekennzeichnet durch Beinhalten einer Steuerbefehlsberechnungseinheit, die einen Drehmomentbefehl für die Synchronmaschine gemäß dem γ-Achsenstrom beschränkt und den Steuerbefehl gemäß dem beschränkten Drehmomentbefehl ausgibt (Ausführungsform 3, 12 bis 17).
In der Synchronmaschinensteuervorrichtung, die auf diese Weise konfiguriert ist, wird gemäß der vorliegenden Erfindung der Drehmomentbefehl beschränkt, wenn die Temperatur der in dem Permanentmagnet beinhaltenden Synchronmaschine ansteigt; somit wird ein Effekt demonstriert, dass die irreversible Demagnetisierung verhindert werden kann und der Ankerstrom der Synchronmaschine, der durch die Leistungsfähigkeit der elektrischen Stromwandlungseinheit beschränkt ist, unterdrückt werden kann, gleich oder kleiner als der Grenzwert zu sein.
- (5) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Magnetbedingungsschätzeinheit eine Magnetbedingungsreferenzeinheit beinhaltet, die ein Kennfeld oder eine Gleichung aufweist, welche die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur oder dem Magnetfluss für eine Mehrzahl der Steuerbefehle anzeigt (Ausführungsform 4, 18 und 19).
Die Synchronmaschinensteuervorrichtung, die auf diese Weise konfiguriert ist, ermöglicht es gemäß der vorliegenden Erfindung, eine Änderung beim Steuerbefehl nachzuverfolgen und die Permanentmagnet-Temperatur oder den Magnetfluss abzuschätzen, selbst wenn sich der Steuerbefehl sequentiell ändert.
- (6) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Steuerbefehlsbedingung zum Bereitstellen des Kennfelds oder der Gleichung, welche die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur oder dem Magnetfluss anzeigen, zu einer Zeit eingestellt wird, wenn der Ankerstrom auf einem vorgegebenen Wert oder größer ist (Ausführungsform 4, 20).
In der Synchronmaschinensteuervorrichtung, die auf solche Weise konfiguriert ist, gemäß der vorliegenden Erfindung, weil die Steuerbefehlsbedingung zum Bereitstellen eines Kennfelds oder einer Gleichung, welche die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur (Magnetfluss) anzeigen, auf eine Stromzone beschränkt ist, wo die Schätzung erforderlich ist, kann die Konfiguration der Magnetbedingungsreferenzeinheit vereinfacht werden.
- (7) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass der Steuerbefehl in jedem vorgegebenen Zeitraum auf einen Steuerbefehl eingestellt wird, für den die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur oder dem Magnetfluss in der Magnetbedingungsreferenzeinheit angezeigt ist, und dadurch, dass die Magnetbedingungsabschätzeinheit die Permanentmagnet-Temperatur oder den Magnetfluss basierend auf dem eingestellten Befehlswert abschätzt (Ausführungsform 4).
In der in solcher Weise konfigurierten Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung kann durch Durchführen der Permanentmagnet-Temperatur(Magnetfluss)-Sschätzung in jedem vorgegebenen Zeitraum die Abschätzoperation daran gehindert werden, für einen langen Zeitraum nicht durchgeführt zu werden.
- (8) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass der Steuerbefehl in jedem vorgegebenen Zeitraum auf einen Steuerbefehl eingestellt wird, für den die Korrelation zwischen den γ-δ-Achsenströmen und der Permanentmagnet-Temperatur oder dem Magnetfluss in der Magnetbedingungsreferenzeinheit angezeigt ist, und dadurch, dass die Magnetbedingungsschätzeinheit den Betrieb des Abschätzens der Permanentmagnet-Temperatur oder des Magnetflusses nur durchführt, wenn die Geschwindigkeit der Synchronmaschine, welche durch Umwandeln der Rotorposition erhalten wird, auf einer vorgegebenen Geschwindigkeit oder höher ist (Ausführungsform 4, 21).
In einer Synchronmaschinensteuervorrichtung, die auf diese Weise gemäß der vorliegenden Erfindung konfiguriert ist, weil der Betrieb des Schätzens der Permanentmagnet-Temperatur (Magnetfluss) nur in einer Hochgeschwindigkeitszone durchgeführt wird, wo die Spannungsausgabegenauigkeit der elektrischen Stromwandlungseinheit höher wird, wird die Permanentmagnet-Temperatur (Magnetfluss) nur abgeschätzt, wenn die Genauigkeit bei der Abschätzung des Gesamtankerverbindungs-Magnetflusses basierend auf dem Spannungsbefehl extrem hoch ist oder wenn die Genauigkeit bei der Koordinatenwandlung des Ankerstroms, der die vorstehende Abschätzgenauigkeit durchläuft, in den γ-Achsenstrom und den δ-Achsenstrom extrem hoch ist; somit zeigt sich ein Effekt, dass die Abschätzungsgenauigkeit erhöht wird.
- (9) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Magnetbedingungsabschätzeinheit einen Modus beinhaltet, in dem die Permanentmagnet-Temperatur oder der Magnetfluss basieren auf den Steuerbefehlen abgeschätzt wird, und die γ-δ-Achsenströme und einen Modus, in dem die Steuerbefehle auf solche Weise eingestellt werden, dass der Ankerstrom der Synchronmaschine 0 wird und dann die Permanentmagnet-Temperatur oder der Magnetfluss geschätzt wird, basierend auf dem Gesamtankerverbindungs-Magnetfluss, der abgeschätzt worden ist, wenn der Ankerstrom eingestellt worden ist (Ausführungsform 5, 22).
In der in solcher Weise konfigurierten Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung zeigt sich ein Effekt, dass selbst, wenn keine Energetisierung durchgeführt wird, die Permanentmagnet-Temperatur (Magnetfluss) geschätzt werden kann.
- (10) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass die Steuerbefehle ein δ-Achsenstrombefehl zum Steuern des δ-Achsenstroms auf 0 und ein Gesamtankerverbindungsmagnetflussbefehl zum Steuern des Gesamtankerverbindungs-Magnetflusses auf eine solche Weise sind, dass eine in der Synchronmaschine erzeugten Induktionsspannung gleich oder niedriger der ausgabefähigen Spannung der elektrischen Stromwandlungseinheit wird (Ausführungsform 6, 23).
Die auf solche Weise gemäß der vorliegenden Erfindung konfigurierte Synchronmaschinensteuervorrichtung kann einen Effekt zeigen, dass die Permanentmagnet-Temperatur (Magnetfluss) geschätzt werden kann, ohne mehr Strom als notwendig dazu zu bringen, in der Ankerwicklung zu fließen, und die Erwärmung oder der Verlust, der durch den Ankerstrom verursacht werden, kann unterdrückt werden.
- (11) Eine Synchronmaschinensteuervorrichtung gemäß der vorliegenden Erfindung ist dadurch gekennzeichnet, dass der δ-Achsenstrombefehl oder der Drehmomentbefehl für die Synchronmaschine intermittent dazu gebracht wird, 0 zu sein, und die Magnetbedingungsschätzeinheit führt die Operation des Abschätzens der Permanentmagnet-Temperatur oder des Magnetflusses nur durch, wenn der δ-Achsenstrombefehl oder der Drehmomentbefehl für die Synchronmaschine 0 ist (Ausführungsform 6, 24).
In der in solcher Weise gemäß der vorliegenden Erfindung konfigurierten Synchronmaschinensteuervorrichtung zeigt sich ein Effekt, dass selbst wenn die Synchronmaschine ihre Lasten antreibt, das erzeugte Drehmoment der Synchronmaschine soweit als möglich daran gehindert wird, einen Effekt zu zeigen, wenn es 0 wird und die durch den Ankerstrom verursachte Erwärmung oder Verlust, der sich auf die Permanentmagnet-Temperatur (Magnetfluss) Abschätzung bezieht, kann unterdrückt werden.
-
Verschiedene Modifikationen und Änderungen dieser Erfindung werden für Fachleute ersichtlich sein, ohne vom Umfang und Geist dieser Erfindung abzuweichen, und es versteht sich, dass diese nicht auf die hierin dargestellten illustrativen Ausführungsformen beschränkt ist.
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- JP 2010-110141 [0010]
- JP 4652176 [0010]
- JP 2003-235286 [0010]
- JP 4548886 [0010]
- JP 4672236 [0010]
- WO 2010/109528 [0010]