-
Die Anmeldung betrifft ein Verfahren zum Betreiben eines Fahrzeugs, ein Fahrzeug, ein Computerprogrammprodukt und ein computerlesbares Medium.
-
Aus der
DE 10 2010 049 091 A1 ist ein Verfahren zum Betreiben zumindest eines Sensors eines Fahrzeugs bekannt, wobei der zumindest eine Sensor zum Erfassen von Objekten innerhalb eines vorbestimmten Erfassungsbereiches ausgebildet ist. Dabei erfolgt ein Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten mittels einer Empfangsvorrichtung des Fahrzeugs. Zudem erfolgt ein Ermitteln einer Position des zumindest einen Objekts mittels der von dem zumindest einen Objekt empfangenen Positionsdaten und ein Vergleichen, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt. Falls die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt, erfolgt weiterhin ein Ermitteln, ob das zumindest eine Objekt von dem zumindest einen Sensor erfasst wird. Weiterhin erfolgt, falls das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird, ein Ermitteln eines momentanen Erfassungsbereiches des zumindest einen Sensors mittels der ermittelten Position des zumindest einen Objekts.
-
Aufgabe der Anmeldung ist es, ein Verfahren zum Betreiben eines Fahrzeugs, ein Fahrzeug, ein Computerprogrammprodukt und ein computerlesbares Medium anzugeben, welche eine weiter verbesserte Erkennung einer eingeschränkten Funktionsfähigkeit eines Sensors des Fahrzeugs ermöglichen.
-
Diese Aufgabe wird mit dem Gegenstand der unabhängigen Ansprüche gelöst. Vorteilhafte Weiterbildungen ergeben sich aus den abhängigen Ansprüchen.
-
Ein Verfahren zum Betreiben eines Fahrzeugs, wobei das Fahrzeug zumindest einen Sensor aufweist und wobei der zumindest eine Sensor zum Erfassen von Objekten innerhalb eines vorbestimmten Erfassungsbereiches ausgebildet ist, weist gemäß einem Aspekt der Anmeldung folgende Schritte auf. Es erfolgt ein Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten mittels einer Empfangsvorrichtung des Fahrzeugs. Zudem erfolgt ein Ermitteln einer Position des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten. Ferner erfolgt ein Ermitteln, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt. Darüber hinaus erfolgt ein Ermitteln zumindest eines Parameters einer Fahrbahngeometrie einer momentan von dem Fahrzeug befahrenen Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung abgelegten Kartendaten. Des Weiteren erfolgt ein Ermitteln, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Falls ermittelt wird, dass die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt und dass der zumindest eine Parameter keine Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet, erfolgt ein Ermitteln, ob das zumindest eine Objekt von dem zumindest einen Sensor erfasst wird. Falls ermittelt wird, dass das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird, erfolgt ein Ermitteln eines momentanen Erfassungsbereiches des zumindest einen Sensors basierend auf der ermittelten Position des zumindest einen Objekts.
-
Das Verfahren gemäß der genannten Ausführungsform ermöglicht eine weiter verbesserte Erkennung einer eingeschränkten Funktionsfähigkeit des zumindest einen Sensors des Fahrzeug. Dies erfolgt insbesondere durch das Ermitteln zumindest eines Parameters der Fahrbahngeometrie im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung abgelegten Kartendaten sowie das Ermitteln, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Dabei wird von der Überlegung ausgegangen, dass eine Einschränkung des Erfassungsbereiches des zumindest einen Sensors, der auch als Umfeldsensor bezeichnet wird, neben Umgebungsbedingungen, die eine aktuelle Wettersituation kennzeichnen, wie beispielsweise Niederschlag, Hagel, Schnee oder Nebel, oder einer Verschmutzung des zumindest einen Sensors auch durch die Fahrbahngeometrie bedingt sein kann. Beispielsweise können Objekte, die sich aufgrund der Fahrbahngeometrie beziehungsweise dem Fahrbahnverlauf zwischen dem Fahrzeug und dem Objekt, welches die Positionsdaten aussendet, befinden, eine Erfassung des Objekts durch den zumindest einen Sensor verhindern. Dies kann mittels der genannten Ausführungsform bei der Erkennung einer eingeschränkten Funktionsfähigkeit des zumindest einen Sensors insbesondere aufgrund der momentanen Witterungsbedingungen oder einer Verschmutzung des Sensors berücksichtigt werden. Damit kann eine fehlerhafte Erkennung einer eingeschränkten Funktionsfähigkeit in vorteilhafter Weise vermieden oder die Wahrscheinlichkeit einer fehlerhaften Erkennung minimiert werden.
-
Das Ermitteln des zumindest einen Parameters beinhaltet dazu in einer Ausführungsform des Verfahrens ein Ermitteln einer Krümmung der Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position. Das Ermitteln, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet, beinhaltet in dieser Ausführungsform ein Ermitteln, ob die Krümmung der Fahrbahn einen vorbestimmten Schwellenwert überschreitet. Dabei wird von der Überlegung ausgegangen, dass die Möglichkeit, Objekte im Bereich zwischen dem Fahrzeug und dem die Positionsdaten aussendenden Objekt anzutreffen, mit zunehmender Krümmung der Fahrbahn zunimmt. Die Krümmung der Fahrbahn ist somit ein besonderes geeigneter Parameter für die Bestimmung einer möglichen Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position des zumindest einen Objekts aufgrund der Fahrbahngeometrie.
-
Das Ermitteln der Krümmung der Fahrbahn kann insbesondere ein Ermitteln eines Radius einer Kurve im Bereich zwischen dem Fahrzeug und der ermittelten Position beinhalten. Die Krümmung der Fahrbahn wird dabei basierend auf dem ermittelten Radius der Kurve bestimmt, wobei ein geringer Wert des Kurvenradius eine hohe Krümmung der Fahrbahn kennzeichnet. Bei einer derartigen Kurve mit geringem Radius besteht eine erhöhte Möglichkeit, dass sich Objekte zwischen dem Fahrzeug und der ermittelten Position des weiteren Objekts befinden, beispielsweise an einem Fahrbahnrand.
-
In einer weiteren Ausgestaltung beinhaltet das Ermitteln der Krümmung der Fahrbahn ein Ermitteln eines Höhenprofils der Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position. Dabei wird von der Überlegung ausgegangen, dass das die Positionsdaten aussendende Objekt beispielsweise aufgrund einer Geländeerhebung oder einer Geländevertiefung, welche sich zwischen dem Fahrzeug und dem Objekt befindet, nicht von dem zumindest einen Sensor erfasst wird. Derartige Geländeverläufe und damit verbundene Krümmungen der Fahrbahn in vertikaler Richtung können durch das Ermitteln des Höhenprofils in vorteilhafter Weise berücksichtigt werden.
-
Der zumindest eine Sensor ist bevorzugt als optische Kamera ausgebildet, beispielsweise als Frontkamera des Fahrzeugs. Eine optische Kamera, welche als optischer Sensor im Bereich der Wellenlänge des für den Menschen sichtbaren Spektrums ausgelegt ist, unterliegt dabei im Wesentlichen denselben Auswirkungen von Umgebungsbedingungen wie der Mensch selbst. Eine Erkennung eines verringerten Erfassungsbereiches der optischen Kamera ermöglicht damit in vorteilhafter Weise zudem, auf eine Verringerung bzw. Einschränkung der Sichtweite für die Insassen des Fahrzeugs, insbesondere für den Fahrer des Fahrzeugs, zu schließen.
-
Weiterhin kann der zumindest eine Sensor als elektromagnetischer Sensor, insbesondere als laufzeitbasierter Sensor, beispielsweise als Radarsensor oder als Lidarsensor, oder als akustischer Sensor, insbesondere als Ultraschallsensor, ausgebildet sein. Die genannten Sensoren unterliegen ebenfalls Einschränkungen aufgrund von starkem Niederschlag, Hagel, Schnee oder Nebel, wobei der Grad der Einschränkung von dem jeweiligen physikalischen Prinzip zum Erfassen der Objekte abhängt.
-
Das Ermitteln der Position des zumindest einen Objekts beinhaltet in einer weiteren Ausführungsform des Verfahrens ein Ermitteln eines Abstands des zumindest einen Objekts zu dem Fahrzeug. Der momentane Erfassungsbereich des zumindest einen Sensors wird dabei bevorzugt derart ermittelt, dass der ermittelte Abstand des zumindest einen Objekts zu dem Fahrzeug eine Obergrenze des momentanen Erfassungsbereiches bildet, falls das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird. Eine derart ermittelte Reichweite des zumindest einen Sensors ist ein besonders geeignetes Maß für dessen tatsächliche momentane Reichweite.
-
Zudem kann eine Meldung innerhalb des Fahrzeugs ausgegeben werden, falls ermittelt wird, dass das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird. Dadurch können die Insassen des Fahrzeugs, insbesondere der Fahrer des Fahrzeugs, auf die ermittelte eingeschränkte Funktionsfähigkeit des Sensors und, falls der zumindest eine Sensor als optische Kamera ausgebildet ist, auf die eingeschränkte momentane Sichtweite hingewiesen werden. Die Meldung beinhaltet dazu bevorzugt die ermittelte Obergrenze des momentanen Erfassungsbereiches, das heißt im Fall einer Kamera die momentane maximale Sichtweite.
-
Weiterhin erfolgt bevorzugt ein automatisches Anpassen zumindest eines Fahrerassistenzsystems des Fahrzeugs basierend auf dem ermittelten momentanen Erfassungsbereich. Dadurch kann der Betrieb des Fahrerassistenzsystems auf den verringerten Erfassungsbereich abgestimmt werden.
-
Das zumindest eine Fahrerassistenzsystem ist dabei in einer Ausführungsform ausgebildet zum automatischen Betätigen zumindest eines Elementes des Fahrzeugs, ausgewählt aus der Gruppe, bestehend aus einer Bremsvorrichtung, einer Antriebsvorrichtung, einer Lenkvorrichtung und einer Warnvorrichtung. Das Anpassen des zumindest einen Fahrerassistenzsystems beinhaltet in dieser Ausführungsform ein Anpassen eines Schwellenwertes für das automatische Betätigen des zumindest einen Elementes, derart, dass die automatische Betätigung verglichen mit dem gegenwärtigen Schwellenwert zu einem früheren Zeitpunkt erfolgt. In derartigen Situationen mit beispielsweise eingeschränkter Sichtweite kann somit ein früheres Ausgeben einer Warnmeldung beziehungsweise ein frühzeitiger autonomer Eingriff in die Fahrdynamik des Fahrzeugs erfolgen.
-
Das zumindest eine Fahrerassistenzsystem ist dazu beispielsweise ausgewählt aus der Gruppe, bestehend aus einem Notbremssystem, einem Bremsassistenten, einem Spurhalteassistenten, einem Kurvenhaltesystem und einem Kollisionswarnsystem.
-
Ferner kann das zumindest eine Fahrerassistenzsystem als Abstandsregeltempomat ausgebildet sein. Das Anpassen des Fahrerassistenzsystems beinhaltet in dieser Ausgestaltung bevorzugt ein Anpassen eines Geschwindigkeits-Sollwertes des Abstandsregeltempomaten. Ferner kann das Anpassen des Abstandsregeltempomaten, der auch als adaptive Geschwindigkeitsregelanlage oder ACC (adaptive cruise control) bezeichnet wird, ein Erhöhen eines Folgeabstands zu einem vorausfahrenden, als Zielfahrzeug für den Abstandsregeltempomaten gewählten Fahrzeug beinhalten.
-
Die ermittelte Position des zumindest einen Objekts ist typischerweise eine Position relativ zu dem Fahrzeug. Eine derartige relative Position des Objekts zu dem Fahrzeug kann in besonders einfacher Weise mit dem vorbestimmten Erfassungsbereich des zumindest einen Sensors verglichen werden. Eine zeitliche Synchronisation der ermittelten Position mit von dem zumindest einen Sensor ermittelten Daten kann ferner in einfacher Weise erfolgen, falls die von dem zumindest einen Objekt ausgesendeten Positionsdaten sowie die von dem Sensor ermittelten Daten mit Informationen über den Zeitpunkt deren Ermittlung, das heißt mit einem Zeitstempel, versehen werden.
-
Weiterhin können die von dem zumindest einen Objekt ausgesendeten Positionsdaten mit Informationen über die Abmessungen des zumindest einen Objekts versehen werden. Dadurch kann die Position des zumindest einen Objekts mittels der von dem zumindest einen Objekt empfangenen Positionsdaten in möglichst genauem Maße ermittelt werden.
-
In einer weiteren Ausgestaltung des Verfahrens erfolgt zudem ein Ermitteln einer Geschwindigkeit des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten. Dies ermöglicht eine verbesserte Unterscheidung von für die Auswertung relevanten Objekten, beispielsweise weitere, vorausfahrende Fahrzeuge, von unrelevanten Objekten in der Umgebung des Fahrzeugs.
-
Die Anmeldung betrifft zudem ein Fahrzeug, das zumindest einen Sensor aufweist, wobei der zumindest eine Sensor zum Erfassen von Objekten innerhalb eines vorbestimmten Erfassungsbereiches ausgebildet ist. Zudem weist das Fahrzeug eine Empfangsvorrichtung auf, die zum Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten ausgebildet ist. Weiterhin weist das Fahrzeug eine erste Ermittlungsvorrichtung auf, die zum Ermitteln einer Position des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten ausgebildet ist. Ferner weist das Fahrzeug eine zweite Ermittlungsvorrichtung auf, ausgebildet zum Ermitteln, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt. Des Weiteren weist das Fahrzeug eine dritte Ermittlungsvorrichtung auf, die ausgebildet ist zum Ermitteln zumindest eines Parameters einer Fahrbahngeometrie einer momentan von dem Fahrzeug befahrenen Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung abgelegten Kartendaten. Weiterhin weist das Fahrzeug eine vierte Ermittlungsvorrichtung auf, die zum Ermitteln ausgebildet ist, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Das Fahrzeug weist ferner eine fünfte Ermittlungsvorrichtung auf, die zum Ermitteln ausgebildet ist, ob das zumindest eine Objekt von dem zumindest einen Sensor erfasst wird, falls ermittelt wird, dass die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt und dass der zumindest eine Parameter keine Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet. Darüber hinaus weist das Fahrzeug eine sechste Ermittlungsvorrichtung auf, die zum Ermitteln eines momentanen Erfassungsbereiches des zumindest einen Sensors basierend auf der ermittelten Position des zumindest einen Objekts ausgebildet ist, falls ermittelt wird, dass das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird.
-
Das Fahrzeug gemäß der Anmeldung weist die bereits im Zusammenhang mit dem Verfahren gemäß der Anmeldung genannten Vorteile auf, welche an dieser Stelle zur Vermeidung von Wiederholungen nicht nochmals aufgeführt werden.
-
Die Empfangsvorrichtung ist bevorzugt Bestandteil einer Fahrzeug-zu-Fahrzeug-Kommunikationsvorrichtung und/oder einer Fahrzeug-zu-Infrastruktur-Kommunikationsvorrichtung. Die genannten Kommunikationsvorrichtungen werden dabei auch als Car-to-Car-(C2C) oder Vehicle-to-Vehicle-(V2V)Communication bzw. Car-to-Infrastructure-(C2I) oder Vehicle-to-Roadside-(V2R)Communication sowie zusammenfassend als Car-to-X-(C2X) oder Vehicle-to-X-(V2X)Communication bezeichnet.
-
Der zumindest eine Sensor ist bevorzugt als optische Kamera ausgebildet, beispielsweise als Frontkamera, und das Fahrzeug ist bevorzugt ein Kraftfahrzeug, insbesondere ein Personenkraftwagen oder ein Lastkraftwagen.
-
Darüber hinaus betrifft die Anmeldung ein Computerprogrammprodukt, das, wenn es auf einer Recheneinheit eines Fahrzeugs ausgeführt wird, die Recheneinheit anleitet, folgende Schritte auszuführen. Die Recheneinheit wird angeleitet zum Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten mittels einer Empfangsvorrichtung des Fahrzeugs. Zudem wird die Recheneinheit angeleitet zum Ermitteln einer Position des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten. Ferner wird die Recheneinheit angeleitet zum Ermitteln, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt. Weiterhin wird die Recheneinheit angeleitet zum Ermitteln zumindest eines Parameters einer Fahrbahngeometrie einer momentan von dem Fahrzeug befahrenen Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung abgelegten Kartendaten. Darüber hinaus wird die Recheneinheit angeleitet zum Ermitteln, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Falls ermittelt wird, dass die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt und dass der zumindest eine Parameter keine Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet, wird die Recheneinheit angeleitet zum Ermitteln, ob das zumindest eine Objekt von dem zumindest einen Sensor erfasst wird. Falls ermittelt wird, dass das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird, wird die Recheneinheit angeleitet zum Ermitteln eines momentanen Erfassungsbereiches des zumindest einen Sensors basierend auf der ermittelten Position des zumindest einen Objekts.
-
Ferner betrifft die Anmeldung ein computerlesbares Medium, auf dem ein Computerprogrammprodukt gemäß der genannten Ausführungsform gespeichert ist.
-
Das Computerprogrammprodukt und das computerlesbare Medium gemäß der Anmeldung weisen die bereits im Zusammenhang mit dem Verfahren gemäß der Anmeldung genannten Vorteile auf, welche an dieser Stelle zur Vermeidung von Wiederholungen nicht nochmals aufgeführt werden.
-
Ausführungsformen der Anmeldung werden nun anhand der beigefügten Figuren näher erläutert.
-
1 zeigt ein Flussdiagramm eines Verfahrens zum Betreiben eines Fahrzeugs gemäß einer Ausführungsform der Anmeldung;
-
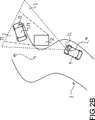
2A und 2B zeigen Beispiele von Verkehrssituationen, in denen die Verfahren gemäß der Anmeldung eingesetzt werden können;
-
3 zeigt Komponenten des in den 2A und 2B dargestellten Fahrzeugs.
-
1 zeigt ein Flussdiagramm eines Verfahrens zum Betreiben eines Fahrzeugs gemäß einer Ausführungsform der Anmeldung. Das Fahrzeug ist bevorzugt ein Kraftfahrzeug, beispielsweise ein Personenkraftwagen oder ein Lastkraftwagen, und weist zumindest einen Sensor auf, der zum Erfassen von Objekten innerhalb eines vorbestimmten Erfassungsbereiches in der Umgebung des Fahrzeugs ausgebildet ist. Bevorzugt ist der zumindest eine Sensor dabei als optische Kamera ausgebildet.
-
In einem Schritt 60 erfolgt während eines Betriebs des Kraftfahrzeugs ein Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten mittels einer Empfangsvorrichtung des Fahrzeugs. Beispielsweise wird mittels der Empfangsvorrichtung eine von dem Objekt ausgesendete Nachricht empfangen, wobei die Nachricht die Positionsdaten beinhaltet. Die Empfangsvorrichtung ist dabei bevorzugt Bestandteil einer Fahrzeug-zu-Fahrzeug-Kommunikationsvorrichtung und/oder einer Fahrzeug-zu-Infrastruktur-Kommunikationsvorrichtung.
-
In einem Schritt 70 wird eine Position des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten ermittelt. Beispielsweise wird basierend auf den empfangenen Positionsdaten die Position des zumindest einen Objekts relativ zu dem Fahrzeug ermittelt. Dazu kann die momentane Position des Fahrzeugs mittels einer Positionsermittlungsvorrichtung, welche beispielsweise Bestandteil eines Navigationssystems des Fahrzeugs ist, ermittelt und basierend darauf die Position des zumindest einen Objekts relativ zu dem Fahrzeug bestimmt werden. Insbesondere kann die relative Position den momentanen Abstand des zumindest einen Objekts von dem Fahrzeug sowie einen Winkel, den das zumindest eine Objekt in Bezug auf eine Referenzachse des Fahrzeugs, beispielsweise eine Referenzachse des Sensors, einnimmt, beinhalten.
-
In einem Schritt 80 wird ermittelt, ob die ermittelte Position des zumindest einen Objekts innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt. Dazu wird beispielsweise ermittelt, ob der Abstand des zumindest einen Objekts sowie dessen Ausrichtung zu der Referenzachse innerhalb der Reichweite bzw. des Öffnungswinkels des zumindest einen Sensors liegen. Die Reichweite beträgt dabei beispielsweise ungefähr 100 m und der Öffnungswinkel ±22°, falls der zumindest eine Sensor als optische Kamera ausgebildet ist. Falls der Sensor als Radarsensor ausgebildet ist, beträgt die Reichweite typischerweise 200 m und, falls der Sensor als Lidarsensor ausgebildet ist, typischerweise 150 m. Falls der Sensor als Ultraschallsensor ausgebildet ist, beträgt die Reichweite beispielsweise 5 m.
-
Wird in dem Schritt 80 ermittelt, dass die ermittelte Position nicht innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt, werden die Schritte 60, 70 und 80 wiederholt ausgeführt.
-
Wird hingegen in dem Schritt 80 ermittelt, dass die ermittelte Position des zumindest einen Objekts innerhalb des vorbestimmten Erfassungsbereiches des zumindest einen Sensors liegt, erfolgt in einem Schritt 90 ein Ermitteln zumindest eines Parameters einer Fahrbahngeometrie einer momentan von dem Fahrzeug befahrenen Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung abgelegten Kartendaten. Die Speichervorrichtung ist dabei beispielsweise Bestandteil eines Navigationssystems des Fahrzeugs, wobei die Kartendaten bevorzugt in einem standardisierten Format, beispielsweise dem so genannten ADASIS-Format, abgelegt sind.
-
Bevorzugt wird eine Krümmung der Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position ermittelt, insbesondere ein Radius einer Kurve im Bereich zwischen dem Fahrzeug und der ermittelten Position. Ferner kann das Ermitteln der Krümmung der Fahrbahn ein Ermitteln eines Höhenprofils der Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position beinhalten.
-
In einer weiteren Ausgestaltung erfolgt das Ermitteln des zumindest einen Parameters vor dem Empfangen der Positionsdaten. Beispielsweise wird im Fahrbetrieb die Krümmung der Fahrbahn im Bereich des Fahrzeugs kontinuierlich ermittelt und daraus die Krümmung im Bereich zwischen dem Fahrzeug und der ermittelten Position bestimmt.
-
In einem Schritt 100 wird ermittelt, ob der in dem Schritt 90 ermittelte Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Falls das Ermitteln des zumindest einen Parameters ein Ermitteln einer Krümmung der Fahrbahn beinhaltet, wird in dem Schritt 100 ermittelt, ob die Krümmung der Fahrbahn einen vorbestimmten Schwellenwert überschreitet. Ist dies der Fall, kennzeichnet der Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches aufgrund der Fahrbahngeometrie. Falls die Krümmung der Fahrbahn jedoch den vorbestimmten Schwellenwert nicht überschreitet, wird darauf geschlossen, dass keine Einschränkung des vorbestimmten Erfassungsbereiches aufgrund der Fahrbahngeometrie vorliegt.
-
Wird in dem Schritt 100 ermittelt, dass der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet, werden die Schritte 60, 70, 80 sowie gegebenenfalls 90 und 100 wiederholt ausgeführt.
-
Falls hingegen in dem Schritt 100 ermittelt wird, dass der zumindest eine Parameter keine Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet, wird in einem Schritt 110 ermittelt, ob das zumindest eine Objekt von dem zumindest einen Sensor erfasst wird.
-
Wird das Objekt von dem Sensor erfasst, werden die Schritte 60, 70, 80 sowie gegebenenfalls 90, 100 und 110 wiederholt ausgeführt.
-
Falls hingegen in dem Schritt 110 ermittelt wird, dass das zumindest eine Objekt von dem zumindest einen Sensor nicht erfasst wird, wird in einem Schritt 120 ein momentaner Erfassungsbereich des zumindest einen Sensors basierend auf der ermittelten Position des zumindest einen Objekts bestimmt.
-
Bevorzugt bildet der ermittelte Abstand des zumindest einen Objekts zu dem Fahrzeug eine Obergrenze des ermittelten momentanen Erfassungsbereiches, falls keine Positionsdaten von weiteren Objekten innerhalb des vorbestimmten Erfassungsbereiches empfangen werden.
-
Falls von zwei Objekten innerhalb des vorbestimmten Erfassungsbereiches Positionsdaten empfangen sowie jeweils eine Position der beiden Objekte ermittelt wird und das erste Objekt von dem Sensor nicht erfasst wird, hingegen das zweite Objekt, welches sich im Vergleich zu dem ersten Objekt in einem geringen Abstand zu dem Fahrzeug befindet, von dem Sensor erfasst wird, bildet der ermittelte Abstand des zweiten Objekts zu dem Fahrzeug bevorzugt eine Untergrenze des momentanen Erfassungsbereiches. Der momentane Erfassungsbereich weist somit eine Reichweite auf, welche zwischen dem Abstand des erfassten Objekts und dem Abstand des nicht erfassten Objekts liegt.
-
In der gezeigten Ausführungsform wird ferner in einem Schritt 130 eine Meldung innerhalb des Fahrzeugs ausgegeben, beispielsweise eine akustische und/oder optische Meldung. Die Meldung beinhaltet dabei bevorzugt die ermittelte Obergrenze des momentanen Erfassungsbereiches, das heißt im Fall einer Kamera die momentane maximale Sichtweite.
-
Zusätzlich oder alternativ erfolgt in dem Schritt 130 ein automatisches Anpassen zumindest eines Fahrerassistenzsystems des Fahrzeugs basierend auf dem ermittelten momentanen Erfassungsbereich. Damit kann beispielsweise bei einer eingeschränkter Sichtweite ein früheres Ausgeben einer Warnmeldung beziehungsweise ein frühzeitiger autonomer Eingriff in die Fahrdynamik des Fahrzeugs erfolgen. Das zumindest eine Fahrerassistenzsystem ist dazu beispielsweise ausgewählt aus der Gruppe, bestehend aus einem Notbremssystem, einem Bremsassistenten, einem Spurhalteassistenten, einem Kurvenhaltesystem und einem Kollisionswarnsystem.
-
In einer weiteren Ausgestaltung wird ermittelt, ob der momentane Erfassungsbereich des zumindest einen Sensors unterhalb eines vorbestimmten Schwellenwertes liegt. In dieser Ausgestaltung erfolgt das Ausgeben der Meldung bzw. das automatische Anpassen des zumindest einen Fahrerassistenzsystems, falls ermittelt wird, dass der momentane Erfassungsbereich den vorbestimmten Schwellenwert unterschreitet.
-
Mittels der gezeigten Ausführungsform kann somit insbesondere eine eingeschränkte Sichtweite durch eine Nutzung bzw. einen Vergleich von Objektdaten aus V2X einerseits und Umfeldsensorik andererseits erkannt werden.
-
Beispielsweise erkennt eine Frontkamera vorausfahrende Fahrzeuge und liefert mittels digitaler Bildverarbeitung Objektdaten dazu, insbesondere Position und Abstand sowie eine Klassifikation des Objekts. Über beispielsweise eine Fahrzeug-zu-Fahrzeug-Kommunikation werden ebenfalls Informationen über Position und Klassifikation des Fahrzeugs übertragen, woraus anschließend der Abstand berechnet wird.
-
Eine Frontkamera als rein optischer Sensor im Bereich der Wellenlänge des für den Menschen sichtbaren Spektrums unterliegt dabei im Wesentlichen den gleichen Auswirkungen von Umgebungsbedingungen wie auch der Mensch. Insbesondere in der Umgebungsluft verteilte Wasserpartikel bedeuten je nach Anzahl der Partikel pro Volumen, Größe der Partikel und Aggregatszustand eine Dämpfung elektromagnetischer Wellen und somit auch des Lichtes und damit eine Verringerung der Sichtweite.
-
Die genannte Ausführungsform ermöglicht dabei insbesondere einen Vergleich eines per V2X erkannten Objekts innerhalb von Reichweite und Öffnungswinkel der Kamera, beispielsweise innerhalb ca. 100 m und ±22°, mit den von der Kamera äquivalent dazu gelieferten Objektdaten. Erkennt die Kamera ein vorhandenes und auch per V2X in einem Abstand d1 erkanntes Fahrzeug nicht, obwohl es sich innerhalb der Kamerareichweite befindet und insbesondere keine Kurven dazwischen liegen, es also auch nicht abgedeckt wird, so ist eine auf maximal d1 verringerte Sichtweite sehr wahrscheinlich.
-
Werden andererseits Fahrzeuge in einer geringeren Entfernung d2 noch erkannt, so kann daraus auf eine aktuelle Sichtweite dSicht mit d2 < dSicht < d1 geschlossen werden.
-
Bei Nichterkennen von Fahrzeugen durch die Kamera auf eine Entfernung von kleiner als beispielsweise ca. 10 m ist dagegen von einer Verschmutzung bzw. einem Defekt von Kamera, Optik oder der Scheibe vor der Kamera auszugehen, falls der Sensor als optische Kamera ausgebildet ist. In einem derartigen Fall können weitere Algorithmen der Kamera zur Verschmutzungs- und Fehlererkennung herangezogen und die ermittelten Daten miteinander kombiniert bzw. verglichen werden.
-
Das genannte Verfahren besitzt dabei zudem den Vorteil, dass die Zahl an Fahrzeugen mit V2X-Ausstattung nicht sehr hoch sein muss, da bereits ein einziges Fahrzeug beispielsweise zur Nebelerkennung ausreicht.
-
Eine derart detektierte eingeschränkte Sichtweite kann anschließend beispielsweise verwendet werden, um einen Warnhinweis auszugeben, etwa „Achtung, Sichtweite maximal 50 m, bitte Geschwindigkeit auf 80 km/h reduzieren”, um eine Sollgeschwindigkeit eines ACC-Systems zu beeinflussen, das heißt zu Reduzieren, um die Parameter von abstandsbasierten Warn- und Bremsalgorithmen anzupassen, um eine errechnete Geschwindigkeit zur Durchfahrt einer Kurve zu beeinflussen und/oder um eine von einem Navigationssystem errechnete Reisezeit für eine momentane Fahrtroute des Fahrzeugs anzupassen, das heißt zu erhöhen.
-
Die genannte Ausführungsform ermöglicht somit eine erhöhte Sicherheit durch die Erkennung der eingeschränkten Sichtweite sowie die Bereitstellung einer hervorstechenden Eigenschaft für die Insassen den Fahrzeugs.
-
2A und 2B zeigen Beispiele von Verkehrssituationen, in denen die Verfahren gemäß den Ausführungsformen der Anmeldung eingesetzt werden können, insbesondere das Verfahren gemäß der in 1 gezeigten Ausführungsform. Komponenten mit den gleichen Funktionen werden dabei in den 2A und 2B mit den gleichen Bezugszeichen gekennzeichnet.
-
In der in 2A gezeigten Verkehrssituation fährt ein Fahrzeug 1 in Form eines Personenkraftwagens in einer schematisch mittels eines Pfeils A dargestellten Fahrtrichtung auf einer Fahrspur 26 einer Fahrbahn 7. Die Fahrbahn 7 weist neben der Fahrspur 26 eine weitere Fahrspur 27 auf. In Fahrtrichtung des Fahrzeugs 1 befinden sich vor diesem zwei Objekte 4 und 5 in Form weiterer Fahrzeuge 29 und 30 auf der Fahrspur 26.
-
Das Fahrzeug 1 weist zumindest einen Sensor 2 auf, der zum Erfassen von Objekten innerhalb eines schematisch mittels einer gestrichelten Linie dargestellten vorbestimmten Erfassungsbereiches 3 ausgebildet ist. In der gezeigten Situation ist der Sensor 2 dabei als optische Kamera 11 ausgebildet.
-
Die Objekte 4 und 5 befinden sich dabei innerhalb des vorbestimmten Erfassungsbereiches 3. Der Sensor 2 weist jedoch momentan aufgrund von Nebel 28 im Bereich der Objekte 4 und 5 einen eingeschränkten tatsächlichen Erfassungsbereich 31 auf, der schematisch mittels einer strichpunktierten Linie dargestellt ist. Der tatsächliche Erfassungsbereich 31 ist somit in seinen Abmessungen geringer als der vorbestimmte Erfassungsbereich 3, wobei sich das Fahrzeug 29 außerhalb des tatsächlichen Erfassungsbereiches 31 befindet, wohingegen sich das Fahrzeug 30 zumindest teilweise innerhalb des tatsächlichen Erfassungsbereiches 31 befindet. Somit wird in der gezeigten Situation das Fahrzeug 29 von dem Sensor 2 nicht erfasst, wohingegen das Fahrzeug 30 von diesem erfasst wird.
-
Das Fahrzeug 1 sowie die weiteren Fahrzeuge 29 und 30 weisen jeweils eine Fahrzeug-zu-Fahrzeug-Kommunikationsvorrichtung 22 auf, mittels derer die jeweiligen Positionsdaten an die weiteren Fahrzeuge übermittelt werden können. Wie im Zusammenhang mit den folgenden Figuren näher erläutert wird, kann daraus deren Position ermittelt und bestimmt werden, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches 3 des Sensors 2 liegt.
-
Wie ebenfalls im Zusammenhang mit den folgenden Figuren näher erläutert wird, kann zudem basierend auf in einer Speichervorrichtung des Fahrzeugs 1 abgelegten Kartendaten ermittelt werden, ob eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches 3 zwischen dem Fahrzeug 1 und den weiteren Fahrzeugen 29 und 30 aufgrund einer Fahrbahngeometrie der momentan von dem Fahrzeug 1 befahrenen Fahrbahn 7 vorliegt. Falls dies, wie in der 2A gezeigten Situation nicht der Fall ist, wird ein momentaner Erfassungsbereich 9 des Sensors 2, der schematisch mittels einer durchgezogenen Linie dargestellt ist, basierend auf der ermittelten Position des Fahrzeugs 29 sowie der ermittelten Position des Fahrzeugs 30 ermittelt. Dabei bildet der Abstand des Fahrzeugs 1 zu dem von dem Sensor 2 nicht erfassten Fahrzeug 29 die Obergrenze sowie der Abstand des Fahrzeugs 1 zu dem von dem Sensor 2 erfassten Fahrzeug 30 die Untergrenze des momentanen Erfassungsbereiches 9.
-
In der in 2B gezeigten Verkehrssituation befindet sich wiederum ein Fahrzeug 29 in Fahrtrichtung des Fahrzeugs 1 vor diesem und zudem innerhalb des vorbestimmten Erfassungsbereiches 3.
-
Die Fahrbahn 7 weist jedoch im Bereich zwischen dem Fahrzeug 1 und dem weiteren Fahrzeug 29 eine Kure 10 auf, weshalb die Fahrbahn 7 derart gekrümmt ist, dass ein Objekt 32, welches sich im Bereich zwischen dem Fahrzeug 1 und dem weiteren Fahrzeug 29 benachbart zu der Fahrbahn 7 befindet, beispielsweise ein Baum, einen schematisch mittels strichpunktierten Linien dargestellten Bereich 33 innerhalb des vorbestimmten Erfassungsbereiches 3 für den Sensor 2 verdeckt. Das weitere Fahrzeug 29 befindet sich dabei in der in 2B gezeigten Verkehrssituation innerhalb des Bereiches 33 und wird daher von dem Sensor 2 nicht erfasst, auch wenn der vorbestimmte Erfassungsbereich 3 nicht durch Umweltbedingungen wie Schnee, Regen oder Nebel eingeschränkt ist.
-
Wie ebenfalls im Zusammenhang mit der nachfolgenden Figur näher erläutert wird, wird damit in der gezeigten Situation nicht auf eine eingeschränkte Sichtweite des Sensors 2 aufgrund von Witterungsbedingungen oder einer Verschmutzung des Sensors 2 geschlossen.
-
Dazu zeigt 3 Komponenten des in den 2A und 2B dargestellten Fahrzeugs 1. Komponenten mit den gleichen Funktionen wie in den 2A und 2B werden mit den gleichen Bezugszeichen gekennzeichnet und im Folgenden nicht nochmals erläutert. Aus Gründen der Übersichtlichkeit ist das Fahrzeug in 3 nicht näher dargestellt.
-
Das Fahrzeug weist zusätzlich zu dem zumindest einen Sensor 2, der in der gezeigten Ausführungsform als optische Kamera 11 ausgebildet ist, eine Empfangsvorrichtung 6 auf, die zum Empfangen von von zumindest einem Objekt ausgesendeten Positionsdaten ausgebildet ist. Die Empfangsvorrichtung 6 ist in der gezeigten Ausführungsform Bestandteil einer gemeinsamen Sende- und Empfangseinheit 35 einer Fahrzeug-zu-Fahrzeug-Kommunikationsvorrichtung 22 und einer Fahrzeug-zu-Infrastruktur-Kommunikationsvorrichtung 23. Die Sende- und Empfangseinheit 35 weist ferner eine Sendevorrichtung 34 auf.
-
Das Fahrzeug weist zudem eine erste Ermittlungsvorrichtung 16 auf, die zum Ermitteln einer Position des zumindest einen Objekts basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten ausgebildet ist. Die erste Ermittlungsvorrichtung 16 ist dazu in der gezeigten Ausführungsform über eine Signalleitung 38 mit der Empfangsvorrichtung 6 sowie über eine Signalleitung 39 mit einem Navigationssystem 37 des Fahrzeugs verbunden. Das Navigationssystem 37 weist dabei eine Positionsermittlungsvorrichtung 36 auf, die zum Ermitteln einer momentanen Position des Fahrzeugs ausgebildet ist. Basierend auf den von dem zumindest einen Objekt empfangenen Positionsdaten sowie den mittels der Positionsermittlungsvorrichtung 36 ermittelten Positionsdaten des Fahrzeugs ermittelt die erste Ermittlungsvorrichtung 16 dabei eine Position des Objekts relativ zu dem Fahrzeug.
-
Ferner weist das Fahrzeug eine zweite Ermittlungsvorrichtung 17 auf, die zum Ermitteln ausgebildet ist, ob die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des Sensors 2 liegt. Die zweite Ermittlungsvorrichtung 17 ist dazu über eine Signalleitung 40 mit der ersten Ermittlungsvorrichtung 16 verbunden und weist beispielsweise eine Speichervorrichtung auf, in welcher Daten abgelegt sind, die den vorbestimmten Erfassungsbereich kennzeichnen, beispielsweise Reichweite und Öffnungswinkel der optischen Kamera 11.
-
Darüber hinaus weist das Fahrzeug eine dritte Ermittlungsvorrichtung 18 auf, die zum Ermitteln zumindest eines Parameters einer Fahrbahngeometrie einer momentan von dem Fahrzeug befahrenen Fahrbahn im Bereich zwischen dem Fahrzeug und der ermittelten Position basierend auf in einer Speichervorrichtung 8 abgelegten Kartendaten ausgebildet ist, wobei die Speichervorrichtung 8 in der gezeigten Ausführungsform Bestandteil des Navigationssystems 37 ist. Die dritte Ermittlungsvorrichtung 18 ist dazu über eine Signalleitung 41 mit der zweiten Ermittlungsvorrichtung 17 sowie über eine Signalleitung 42 mit dem Navigationssystem 37 verbunden.
-
Das Fahrzeug weist weiterhin eine vierte Ermittlungsvorrichtung 19 auf, die zum Ermitteln ausgebildet ist, ob der zumindest eine Parameter eine mögliche Einschränkung des vorbestimmten Erfassungsbereiches zwischen dem Fahrzeug und der ermittelten Position kennzeichnet. Die vierte Ermittlungsvorrichtung 19 ist dazu über eine Signalleitung 43 mit der dritten Ermittlungsvorrichtung 18 verbunden und weist beispielsweise eine Speichervorrichtung mit darauf abgelegten Schwellenwerten für die Krümmung der Fahrbahn auf.
-
Zudem weist das Fahrzeug eine fünfte Ermittlungsvorrichtung 20 auf, die zum Ermitteln ausgebildet ist, ob das zumindest eine Objekt von dem Sensor 2 erfasst wird, falls ermittelt wird, dass die ermittelte Position innerhalb des vorbestimmten Erfassungsbereiches des Sensors 2 liegt und der zumindest eine Parameter keine Einschränkung des vorbestimmten Erfassungsbereiches kennzeichnet. Die fünfte Ermittlungsvorrichtung 20 ist dazu über eine Signalleitung 44 mit der vierten Ermittlungsvorrichtung 19 sowie über eine Signalleitung 45 mit dem Sensor 2 verbunden.
-
Ferner weist das Fahrzeug eine sechste Ermittlungsvorrichtung 21 auf, die zum Ermitteln eines momentanen Erfassungsbereiches des Sensors 2 basierend auf der ermittelten Position des zumindest einen Objekts ausgebildet ist, falls ermittelt wird, dass das zumindest eine Objekt von dem Sensor 2 nicht erfasst wird. Die sechste Ermittlungsvorrichtung 21 ist dazu über eine Signalleitung 46 mit der fünften Ermittlungsvorrichtung 20 verbunden.
-
Die sechste Ermittlungsvorrichtung 21 ist in der gezeigten Ausführungsform zudem über eine Signalleitung 47 mit dem Navigationssystem 37, über eine Signalleitung 48 mit einem ersten Fahrerassistenzsystem 12 und über eine Signalleitung 50 mit einem zweiten Fahrerassistenzsystem 13 verbunden.
-
Das erste Fahrerassistenzsystem 12 ist ausgebildet zum automatischen Betätigen zumindest eines Elementes 14 des Fahrzeugs, ausgewählt aus der Gruppe, bestehend aus einer Bremsvorrichtung, einer Antriebsvorrichtung, einer Lenkvorrichtung und einer Warnvorrichtung. Dazu ist das erste Fahrerassistenzsystem 12 über eine Signalleitung 49 mit dem zumindest einen Element gekoppelt. Beispielsweise ist das erste Fahrerassistenzsystem 12 ausgewählt aus der Gruppe, bestehend aus einem Notbremssystem, einem Bremsassistenten, einem Spurhalteassistenten, einem Kurvenhaltesystem und einem Kollisionswarnsystem. In der gezeigten Ausführungsform erfolgt dabei ein Anpassen eines Schwellenwertes des ersten Fahrerassistenzsystems 12 für das automatische Betätigen des zumindest einen Elementes 14 derart, dass die automatische Betätigung im Vergleich zu dem gegenwärtigen Schwellenwert zu einem früheren Zeitpunkt erfolgt, falls ermittelt wird, dass das zumindest eine Objekt von dem Sensor 2 nicht erfasst wird.
-
Das zweite Fahrerassistenzsystem 13 ist in der gezeigten Ausführungsform als Abstandsregeltempomat 15 ausgebildet. Dabei erfolgt ebenfalls ein Anpassen des Abstandsregeltempomaten 15 basierend auf dem ermittelten momentanen Erfassungsbereich des Sensors 2 mittels eines Anpassens eines Geschwindigkeits-Sollwertes des Abstandsregeltempomaten 15 und/oder eines Anpassens eines Folgeabstands zu einem vorausfahrenden, als Zielfahrzeug für den Abstandsregeltempomaten 15 gewählten Fahrzeug.
-
Ferner erfolgt in der gezeigten Ausführungsform ein Anpassen einer mittels des Navigationssystems 37 ermittelten Fahrtdauer basierend auf dem ermittelten momentanen Erfassungsbereich, das heißt es erfolgt ein Erhöhen der ermittelten voraussichtlichen Fahrtdauer bei einer ermittelten eingeschränkten Sichtweite.
-
Das Fahrzeug weist in der gezeigten Ausführungsform ferner eine Recheneinheit 24 und ein computerlesbares Medium 25 auf, wobei auf dem computerlesbaren Medium 25 ein Computerprogrammprodukt gespeichert ist, das, wenn es auf der Recheneinheit 24 ausgeführt wird, die Recheneinheit 24 anleitet, die im Zusammenhang mit den Ausführungsformen des Verfahrens gemäß der Anmeldung genannten Schritte, insbesondere die Schritte der in 1 gezeigten Ausführungsform, mittels den dabei genannten Elementen auszuführen. Dazu ist die Recheneinheit 24 in einer nicht näher dargestellten Weise direkt oder indirekt mit den entsprechenden Elementen verbunden.
-
Obwohl zumindest eine beispielhafte Ausführungsform in der vorhergehenden Beschreibung gezeigt wurde, können verschiedene Änderungen und Modifikationen vorgenommen werden. Die genannten Ausführungsformen sind lediglich Beispiele und nicht dazu vorgesehen, den Gültigkeitsbereich, die Anwendbarkeit oder die Konfiguration in irgendeiner Weise zu beschränken. Vielmehr stellt die vorhergehende Beschreibung dem Fachmann einen Plan zur Umsetzung zumindest einer beispielhaften Ausführungsform zur Verfügung, wobei zahlreiche Änderungen in der Funktion und der Anordnung von in einer beispielhaften Ausführungsform beschriebenen Elementen gemacht werden können, ohne den Schutzbereich der angefügten Ansprüche und ihrer rechtlichen Äquivalente zu verlassen.
-
Bezugszeichenliste
-
- 1
- Fahrzeug
- 2
- Sensor
- 3
- Erfassungsbereich
- 4
- Objekt
- 5
- Objekt
- 6
- Empfangsvorrichtung
- 7
- Fahrbahn
- 8
- Speichervorrichtung
- 9
- Erfassungsbereich
- 10
- Kurve
- 11
- Kamera
- 12
- Fahrerassistenzsystem
- 13
- Fahrerassistenzsystem
- 14
- Element
- 15
- Abstandsregeltempomat
- 16
- Ermittlungsvorrichtung
- 17
- Ermittlungsvorrichtung
- 18
- Ermittlungsvorrichtung
- 19
- Ermittlungsvorrichtung
- 20
- Ermittlungsvorrichtung
- 21
- Ermittlungsvorrichtung
- 22
- Fahrzeug-zu-Fahrzeug-Kommunikationsvorrichtung
- 23
- Fahrzeug-zu-Infrastruktur-Kommunikationsvorrichtung
- 24
- Recheneinheit
- 25
- Medium
- 26
- Fahrspur
- 27
- Fahrspur
- 28
- Nebel
- 29
- Fahrzeug
- 30
- Fahrzeug
- 31
- Erfassungsbereich
- 32
- Objekt
- 33
- Bereich
- 34
- Sendevorrichtung
- 35
- Sende- und Empfangseinheit
- 36
- Positionsermittlungsvorrichtung
- 37
- Navigationssystem
- 38
- Signalleitung
- 39
- Signalleitung
- 40
- Signalleitung
- 41
- Signalleitung
- 42
- Signalleitung
- 43
- Signalleitung
- 44
- Signalleitung
- 45
- Signalleitung
- 46
- Signalleitung
- 47
- Signalleitung
- 48
- Signalleitung
- 49
- Signalleitung
- 50
- Signalleitung
- 60
- Schritt
- 70
- Schritt
- 80
- Schritt
- 90
- Schritt
- 100
- Schritt
- 110
- Schritt
- 120
- Schritt
- 130
- Schritt
- A
- Pfeil
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- DE 102010049091 A1 [0002]