CN217141403U - 自动清洁装置 - Google Patents
自动清洁装置 Download PDFInfo
- Publication number
- CN217141403U CN217141403U CN202123291982.9U CN202123291982U CN217141403U CN 217141403 U CN217141403 U CN 217141403U CN 202123291982 U CN202123291982 U CN 202123291982U CN 217141403 U CN217141403 U CN 217141403U
- Authority
- CN
- China
- Prior art keywords
- dust
- roller
- free cloth
- braking
- wiping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 102
- 230000007246 mechanism Effects 0.000 claims abstract description 186
- 239000004744 fabric Substances 0.000 claims abstract description 149
- 238000005507 spraying Methods 0.000 claims abstract description 36
- 238000012546 transfer Methods 0.000 claims abstract description 33
- 239000007788 liquid Substances 0.000 claims abstract description 18
- 239000000428 dust Substances 0.000 claims description 21
- 230000008093 supporting effect Effects 0.000 claims description 21
- 239000000758 substrate Substances 0.000 claims description 16
- 230000033001 locomotion Effects 0.000 claims description 15
- 238000001179 sorption measurement Methods 0.000 claims description 13
- 230000000712 assembly Effects 0.000 claims description 12
- 238000000429 assembly Methods 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 9
- 238000007605 air drying Methods 0.000 claims description 7
- 238000010521 absorption reaction Methods 0.000 claims description 6
- 238000001035 drying Methods 0.000 claims description 2
- 239000007921 spray Substances 0.000 abstract description 16
- 230000001976 improved effect Effects 0.000 abstract description 6
- 230000000694 effects Effects 0.000 description 8
- 230000003014 reinforcing effect Effects 0.000 description 8
- 238000004064 recycling Methods 0.000 description 5
- 239000003351 stiffener Substances 0.000 description 5
- 230000002411 adverse Effects 0.000 description 3
- 235000011194 food seasoning agent Nutrition 0.000 description 3
- 239000002245 particle Substances 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 230000002950 deficient Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 239000003463 adsorbent Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000004094 surface-active agent Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 210000002268 wool Anatomy 0.000 description 1
Images

Landscapes
- Cleaning In General (AREA)
Abstract
本申请公开了一种自动清洁装置,用于对产品进行清洁,包括:供给机构,喷洒机构,制动机构,擦拭机构及移载机构。上述自动清洁装置,通过供给机构、喷洒机构、制动机构、擦拭机构和移载机构之间的配合,实现了产品表面不良因素的自动化清洁,降低了人力成本。通过喷洒机构向移动中的无尘布喷洒清洁液,制动机构与供给机构配合使无尘布停止移动,无尘布停止移动时,移载机构与擦拭机构配合使仿形擦拭头通过无尘布对产品的表面进行擦拭,以对产品表面的不良因素进行清洁,提高了产品表面清洁后的良率。
Description
技术领域
本申请涉及产品清洁技术领域,具体涉及一种自动清洁装置。
背景技术
随着3C产品行业的快速发展,人们对于产品的外观要求越来越高。现有产品在阶段性生产之后,产品表面会存在雾状、毛纤、颗粒、异物等不良因素。产品在进行后续生产例如贴膜之前,需要对产品表面的不良因素进行清洁。目前,通常采用人工清洁的方式对产品表面的不良因素进行清洁。然而,人工清洁的效果不好,人工清洁后产品表面的不良率高,且所需求的清洁人力较多,导致人力成本增加。
实用新型内容
鉴于以上内容,有必要提出一种自动清洁装置,以实现对产品表面不良因素的自动化清洁,提高产品表面清洁后的良率,降低人力成本。
本申请实施例提供一种自动清洁装置,用于对产品进行清洁,包括:供给机构,包括供给驱动件和用于输送无尘布的传送辊组件,所述供给驱动件与所述传送辊组件连接并用于驱动所述传送辊组件转动,以使所述传送辊组件带动所述无尘布移动;喷洒机构,包括喷洒头,所述喷洒头与所述无尘布进行移动的区域对应设置,所述喷洒头用于向移动中的所述无尘布喷洒清洁液;制动机构,包括制动驱动件和与所述制动驱动件连接的制动件,所述制动驱动件用于驱动所述制动件靠近所述无尘布以按压所述无尘布,并与所述供给驱动件配合,以使所述无尘布停止移动;擦拭机构,包括仿形擦拭头,所述仿形擦拭头与所述无尘布进行移动的区域对应设置;及移载机构,包括机械手,所述机械手用于对产品进行移载,以在所述无尘布停止移动时,与所述仿形擦拭头配合对所述产品进行清洁。
在一些实施例中,所述供给机构还包括滚筒,所述无尘布缠绕于所述滚筒并可跟随所述滚筒转动;所述传送辊组件包括第一辊、第二辊、第三辊、第四辊和第五辊;所述第一辊与所述供给驱动件连接并与所述第二辊相对设置;所述第一辊、所述第三辊、所述第四辊和所述第五辊沿所述无尘布的移动方向间隔设置;其中,所述无尘布依次经所述第五辊、所述第四辊、所述第三辊后进入所述第一辊与所述第二辊之间。
在一些实施例中,所述制动机构还包括支撑件;所述支撑件和所述制动件分别设置于所述无尘布进行移动的区域的相对两侧;其中,所述制动驱动件驱动所述制动件靠近或远离所述支撑件,以压紧或松开所述无尘布。
在一些实施例中,所述制动机构还包括弹性件,所述弹性件与所述制动件连接且远离所述制动驱动件,所述弹性件用于弹性接触所述无尘布。
在一些实施例中,所述制动驱动件、所述制动件、所述弹性件及所述支撑件构成夹持组件,所述夹持组件的数量为一对,一对所述夹持组件沿所述无尘布的移动方向间隔设置;其中,所述擦拭机构位于一对所述夹持组件之间。
在一些实施例中,所述擦拭机构还包括与所述仿形擦拭头连接的擦拭驱动件,所述擦拭驱动件用于驱动所述仿形擦拭头靠近或远离所述无尘布。
在一些实施例中,所述自动清洁装置还包括检测机构,所述检测机构包括检测器,所述检测器与所述无尘布进行移动的区域对应设置,用于检测所述无尘布。
在一些实施例中,所述移载机构还包括吸附组件,所述吸附组件包括:吸附基板,与所述机械手连接;设于所述吸附基板同侧的多个吸附件和多个止挡件,所述多个吸附件用于吸附所述产品,所述多个吸附件相对于所述吸附基板凸出于所述多个止挡件。
在一些实施例中,所述自动清洁装置还包括吸尘机构,所述吸尘机构邻近所述移载机构设置,用于吸取所述产品上的异物。
在一些实施例中,所述自动清洁装置还包括风干机构,所述风干机构邻近所述移载机构设置,用于烘干所述产品。
上述自动清洁装置,通过供给机构、喷洒机构、制动机构、擦拭机构和移载机构之间的配合,实现了产品表面不良因素的自动化清洁,降低了人力成本。通过喷洒机构向移动中的无尘布喷洒清洁液,制动机构与供给机构配合使无尘布停止移动,无尘布停止移动时,移载机构与擦拭机构配合使仿形擦拭头通过无尘布对产品的表面进行擦拭,以对产品表面的不良因素进行清洁,提高了产品表面清洁后的良率。
附图说明
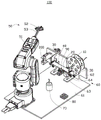
图1是本申请一些实施例提供的自动清洁装置的立体结构示意图。
图2是图1所示的供给机构、喷洒机构、制动机构、擦拭机构、检测机构、支架、连接板及第一加强件的立体结构示意图。
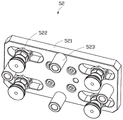
图3是图1所示的吸附组件的立体结构示意图。
主要元件符号说明
自动清洁装置 100
供给机构 10
供给驱动件 11
传送辊组件 12
第一辊 121
第二辊 122
第三辊 123
第四辊 124
第五辊 125
第一件 126
第二件 127
滚筒 13
喷洒机构 20
喷洒头 21
制动机构 30
夹持组件 31
制动驱动件 311
制动件 312
支撑件 313
弹性件 314
制动连接件 315
第二加强件 316
擦拭机构 40
第一仿形擦拭头 41
第二仿形擦拭头 42
擦拭驱动件 43
擦拭连接件 44
移载机构 50
机械手 51
吸附组件 52
吸附基板 521
吸附件 522
止挡件 523
连接杆 53
机台 60
支撑基板 61
支架 62
连接板 63
第一加强件 64
吸尘机构 70
风干机构 80
检测机构 90
检测器 91
检测连接件 92
无尘布 200
具体实施方式
下面详细描述本申请的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本申请,而不能理解为对本申请的限制。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本申请的描述中,需要说明的是,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一特征和第二特征直接接触,也可以包括第一特征和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平厚度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平厚度小于第二特征。
下文的公开提供了许多不同的实施方式或例子用来实现本申请的不同结构。为了简化本申请的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本申请。此外,本申请可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。
本申请实施例提供一种自动清洁装置,用于对产品进行清洁,包括:供给机构,包括供给驱动件和用于输送无尘布的传送辊组件,该供给驱动件与该传送辊组件连接并用于驱动该传送辊组件转动,以使该传送辊组件带动该无尘布移动;喷洒机构,包括喷洒头,该喷洒头与该无尘布进行移动的区域对应设置,该喷洒头用于向移动中的该无尘布喷洒清洁液;制动机构,包括制动驱动件和与该制动驱动件连接的制动件,该制动驱动件用于驱动该制动件靠近该无尘布以按压该无尘布,并与该供给驱动件配合,以使该无尘布停止移动;擦拭机构,包括仿形擦拭头,该仿形擦拭头与该无尘布进行移动的区域对应设置;及移载机构,包括机械手,该机械手用于对产品进行移载,以在该无尘布停止移动时,与该仿形擦拭头配合对该产品进行清洁。
本申请实施例提供的自动清洁装置,通过供给机构、喷洒机构、制动机构、擦拭机构和移载机构之间的配合,实现了产品表面不良因素的自动化清洁,降低了人力成本。通过喷洒机构向移动中的无尘布喷洒清洁液,制动机构与供给机构配合使无尘布停止移动,无尘布停止移动时,移载机构与擦拭机构配合使仿形擦拭头通过无尘布对产品的表面进行擦拭,以对产品表面的不良因素进行清洁,提高了产品表面清洁后的良率。
以下将结合附图对本申请的一些实施例进行详细说明。
请参阅图1,本申请一些实施例提供了一种自动清洁装置100。自动清洁装置100用于对产品(图未示)进行清洁。产品可以为电子设备的屏幕、背板、摄像头或其他需要进行清洁的零部件,产品还可以为治具等需要进行清洁的设备,本申请实施例对此不作限定。自动清洁装置100包括供给机构10、喷洒机构20、制动机构30、擦拭机构40及移载机构50。
请一并参阅图2,供给机构10包括供给驱动件11和用于输送无尘布200的传送辊组件12,供给驱动件11与传送辊组件12连接并用于驱动传送辊组件12转动,以使传送辊组件12能够带动无尘布200移动。喷洒机构20包括喷洒头21,喷洒头21可以与自动清洁装置100自带或外接的一清洁液供给装置(图未示)连接,喷洒头21与无尘布200进行移动的区域对应设置,喷洒头21用于向移动中的无尘布200喷洒清洁液,以提升无尘布200的清洁效果。制动机构30包括制动驱动件311和与制动驱动件311连接的制动件312,制动驱动件311用于驱动制动件312靠近无尘布200以使制动件312按压无尘布200,并与供给驱动件11配合使供给驱动件11停止驱动传送辊组件12转动,从而使无尘布200停止移动。擦拭机构40包括与产品相适配的仿形擦拭头,仿形擦拭头与无尘布200进行移动的区域对应设置,其中,与仿形擦拭头对应的无尘布200被喷洒头21喷洒过清洁液。移载机构50包括机械手51,机械手51用于对产品进行移载,从而在无尘布200停止移动时,与仿形擦拭头配合以对产品进行清洁。
一些实施例提供的自动清洁装置100的一实施过程大致为:以产品为电子设备的一个摄像头为例进行说明。首先,供给驱动件11驱动传送辊组件12转动,使得传送辊组件12带动无尘布200移动。然后,喷洒头21向移动中的无尘布200喷洒清洁液。接着,喷洒过清洁液的无尘布200移动至与仿形擦拭头相对应的位置时,制动驱动件311驱动制动件312按压无尘布200,并使供给驱动件11停止驱动传送辊组件12转动,从而使得无尘布200停止移动,并且在供给机构10和制动机构30的配合下,无尘布200大致为张紧的状态。接着,移载机构50移载产品至无尘布200背离仿形擦拭头的一侧。接着,移载机构50带动产品进行仿形运动并在仿形擦拭头的配合下,使得喷洒过清洁液的无尘布200对产品进行擦拭,直至擦拭完成。接着,移载机构50移载产品进行下料并移载新的需要清洁的产品。接着,制动驱动件311驱动制动件312远离无尘布200以松开无尘布200,供给驱动件11驱动传送辊组件12转动,以使无尘布200重新开始移动。如此往复,从而实现对产品表面不良因素的自动化清洁,避免人为因素对清洁效果的影响,降低人力成本,有利于提高产品表面清洁后的良率。
在一些实施方式中,清洁液可以为酒精、表面活性剂溶液或其他可用于清洁的液体。
请继续参阅图1,在一些实施例中,自动清洁装置100还包括机台60。机台60用于承载供给机构10、喷洒机构20、制动机构30、擦拭机构40、移载机构50及其他机构。如此,自动清洁装置100实现设备整合的效果,自动清洁装置100便于移动,还便于与其他机构或设备相配合以实现产品除自动清洁功能外的其他功能,例如,产品清洁后进行贴膜作业。
在一些实施方式中,机台60包括支撑基板61、支架62、连接板63及第一加强件64。支撑基板61、支架62、连接板63及第一加强件64均大致为板状,支架62通过一对连接板63与支撑基板61垂直连接,第一加强件64的数量为两个,两个第一加强件64分别与支架62及对应的连接板63连接,通过第一加强件64能够提升机台60的结构稳固性。移载机构50可以设置于支撑基板61上。供给机构10、喷洒机构20、制动机构30及擦拭机构40均可以设置于支架62上。
可以理解地,在其他的实施方式中,供给机构10、喷洒机构20、制动机构30及擦拭机构40还可以部分设置于支撑基板61上,另一部分设置于支架62上。连接板63和第一加强件64的数量还可以为一个、三个或更多个。当支架62通过其他的方式例如焊接与支撑基板61连接时,连接板63和第一加强件64还可以省略。
在一些实施例中,自动清洁装置100还包括吸尘机构70。吸尘机构70邻近移载机构50设置且可以设置于支撑基板61上,吸尘机构70用于吸取产品上的毛纤、颗粒等能够被吸取的异物。吸尘机构70可以通过真空吸附的方式吸取产品上的异物。如此,产品通过擦拭机构40的擦拭清洁后,可进一步通过吸尘机构70吸取产品上的异物,有利于提升产品表面不良因素的清洁效果。
可以理解地,在其他的实施例中,吸尘机构70还可以设置于支架62上。
在一些实施例中,自动清洁装置100还包括风干机构80。风干机构80邻近移载机构50且可以设置于支撑基板61上及邻近吸尘机构70设置,风干机构80用于向产品吹热风或冷风,以对产品上的清洁液进行风干,还可以吹落产品上的毛纤、颗粒等能够被吹落的异物。例如,风干机构80向产品吹等离子风以对产品进行风干和吹落异物。如此,产品通过擦拭机构40的擦拭清洁后,再次通过风干机构80风干产品上的清洁液和吹落产品上的异物,有利于提升产品表面不良因素的清洁效果。
可以理解地,在其他的实施例中,风干机构80还可以设置于支架62上。
可以理解地,在其他的实施例中,产品通过擦拭机构40的擦拭清洁后,可以通过风干机构80和吸尘机构70进行深度清洁,或者通过风干机构80或吸尘机构70进行深度清洁。产品通过风干机构80和吸尘机构70进行深度清洁时,风干机构80和吸尘机构70的清洁顺序可以变换。
请继续参阅图2,在一些实施例中,供给机构10还包括滚筒13,滚筒13可转动地设置于支架62上。无尘布200缠绕于滚筒13并可跟随滚筒13转动。其中,无尘布200进行移动的区域可以理解为脱离滚筒13的无尘布200进行移动的路径或路线。
传送辊组件12包括第一辊121、第二辊122、第三辊123、第四辊124、第五辊125、第一件126和第二件127。第一件126和第二件127均大致为“门”字形且均设置于支架62上,第一辊121和第二辊122分别可转动地设置于第一件126和第二件127,示例性地,第一辊121和第二辊122分别通过轴承设置于第一件126和第二件127。第一辊121还与供给驱动件11连接并与第二辊122相对设置,第一辊121与第二辊122可以为啮合连接或其他传动连接,只要两者可以共同转动,以带动无尘布200移动。供给驱动件11与第一辊121分别设置于支架62的相对两侧面,供给驱动件11可以为伺服电机。第一件126、第二件127和轴承作为第一辊121和第二辊122相对设置的一种实现方式,当然还可以通过其他实现方式,例如工字型支架等。如此,供给驱动件11驱动第一辊121转动时,第一辊121可带动第二辊122转动,通过第一辊121和第二辊122带动无尘布200移动。
第一辊121、第三辊123、第四辊124和第五辊125沿无尘布200的移动方向间隔设置,第一辊121、第三辊123和第四辊124位于无尘布200的下方,第二辊122和第五辊125位于无尘布200的上方,无尘布200经滚筒13后依次经第五辊125、第四辊124、第三辊123后进入第一辊121与第二辊122之间。
一些实施例提供的供给机构10的一实施过程大致为:首先,将缠绕无尘布200的滚筒13可转动地设置于支架62上。然后,使用机械装置或人工将无尘布200依次穿设于第五辊125、第四辊124、第三辊123,并最终从第一辊121和第二辊122之间穿设出。接着,启动供给驱动件11,使得供给驱动件11驱动第一辊121转动,使得第一辊121带动第二辊122转动并使无尘布200移动,无尘布200在第一辊121和第二辊122的带动下进一步带动滚筒13转动。如此,实现对无尘布200的连续供给。
可以理解地,在其他的实施例中,第一辊121、第三辊123和第四辊124还可以位于无尘布200的上方,第二辊122和第五辊125位于无尘布200的下方。或者,第一辊121、第三辊123和第五辊125还可以位于无尘布200的上方,第二辊122和第四辊124位于无尘布200的下方。第一辊121、第二辊122、第三辊123、第四辊124和第五辊125还可以采用其他的排布方式进行排布。
可以理解地,在其他的实施例中,供给驱动件11还可以为旋转气缸或其他可以带动第一辊121转动的设备。
可以理解地,在其他的实施例中,自动清洁装置100还可以包括回收机构(图未示),回收机构用于回收使用过的无尘布200。示例性地,回收机构可以为回收框,回收框用于回收使用过的无尘布200。或者,回收机构可以为回收滚筒13,回收滚筒13通过转动以缠绕使用过的无尘布200,从而回收使用过的无尘布200。
在一些实施方式中,喷洒机构20设置于连接板63上,喷洒头21可以连续或断续地向移动中的无尘布200喷洒清洁液。示例性地,无尘布200每移动10cm,喷洒头21则向无尘布200喷洒一次清洁液。
可以理解地,在其他的实施方式中,喷洒机构20还可以设置于支架62或支撑基板61上。
在一些实施例中,制动机构30还包括支撑件313。制动件312大致为板状,支撑件313大致为L形,支撑件313和制动件312分别设置于无尘布200进行移动的区域的相对两侧,支撑件313与支架62连接,制动驱动件311通过制动连接件315与支架62连接,制动连接件315大致为板状,制动驱动件311可以为直线气缸。制动驱动件311驱动制动件312靠近或远离支撑件313,在制动件312和支撑件313的配合下压紧或松开无尘布200。
可以理解地,在其他的实施例中,制动驱动件311还可以为伸缩杆或其他能够进行直线运动的设备。
在一些实施方式中,支撑件313通过第二加强件316与支架62连接,第二加强件316大致为板状。如此,通过第二加强件316,能够提高支撑件313与支架62之间连接的稳固性,避免支撑件313因受到制动件312的按压而松动,从而使得制动机构30不能对无尘布200进行有效的制动。
在一些实施例中,制动机构30还包括弹性件314。弹性件314可以为橡胶等具有弹性及摩擦力的物料。弹性件314大致为板状,弹性件314与制动件312连接且远离制动驱动件311,弹性件314用于弹性接触无尘布200。如此,通过弹性件314,避免制动件312与支撑件313压伤无尘布200;通过弹性件314,还可以增强制动机构30与无尘布200之间的摩擦力,避免移载机构50与擦拭机构40配合擦拭产品时,无尘布200相对松动而无法有效清洁产品表面的不良因素。
在一些实施方式中,定义制动驱动件311、制动件312、弹性件314、支撑件313及相关可选的零部件构成夹持组件31。夹持组件31的数量为一对,一对夹持组件31沿无尘布200的移动方向间隔设置。其中,擦拭机构40位于一对夹持组件31之间。如此,通过一对夹持组件31对无尘布200进行制动及夹持,使得一对夹持组件31之间的无尘布200在制动的情况下处于张紧的状态,在与移载机构50及擦拭机构40配合时,可以对产品表面的不良因素进行有效地擦拭。
可以理解地,在其他的实施方式中,夹持组件31的数量还可以为三个、四个或更多个。需要注意的是,擦拭机构40应当位于两个夹持组件31之间。
在一些实施例中,擦拭机构40还包括与仿形擦拭头连接的擦拭驱动件43。擦拭驱动件43可以为直线气缸,擦拭驱动件43通过擦拭连接件与支架62连接。擦拭驱动件43用于驱动仿形擦拭头靠近或远离无尘布200,以避免仿形擦拭头与移动中的无尘布200产生干涉。
可以理解地,在其他的实施例中,擦拭驱动件43还可以为伸缩杆或其他能够进行直线运动的设备。
在一些实施方式中,擦拭机构40包括一对仿形擦拭头,为了便于说明,定义一对仿形擦拭头分别为第一仿形擦拭头41和第二仿形擦拭头42,第一仿形擦拭头41和第二仿形擦拭头42分别与对应的擦拭驱动件43连接。第一仿形擦拭头41和第二仿形擦拭头42可用于对产品上的两个摄像头同时进行擦拭。如此,有利于提升自动清洁装置100的清洁效率。
可以理解地,第一仿形擦拭头41还可以用于湿擦产品,第二仿形擦拭头42用于干擦产品。对应地,喷洒机构20的喷洒头21可仅对无尘布200上与第一仿形擦拭头41对应的区域喷洒清洁液。如此,通过湿擦产品和干擦产品,实现对产品的深度清洁。当第一仿形擦拭头41用于湿擦产品,第二仿形擦拭头42用于干擦产品时,风干机构80也可以省略。
可以理解地,在其他的实施方式中,擦拭机构40还可以包括三个、四个或更多个仿形擦拭头,三个、四个或更多个仿形擦拭头可以与产品上的多个待清洁区域相对应设置,如此,有利于提升产品的清洁效率。或者,三个、四个或更多个仿形擦拭头分别用于湿擦产品和干擦产品,如此,有利于对产品进行深度清洁及提升产品的清洁效率。
在一些实施例中,自动清洁装置100还包括检测机构90。检测机构90包括检测器91,检测器91通过检测连接件92设置于支架62上,检测连接件92大致为L形,检测器91与无尘布200进行移动的区域对应设置,检测器91用于检测无尘布200。检测器91可以包括红外发射器和红外接收器,红外发射器和红外接收器分别设置于无尘布200的相对两侧,红外接收器用于接收红外发射器发射的红外信号。在一些实施过程中,当红外接收器接收到红外发射器发射的红外信号时,说明自动清洁装置100没有可以使用的无尘布200,示例性地,自动清洁装置100还包括控制器(图未示),红外接收器与控制器连接,控制器接收到红外接收器的信号时,提示作业人员或其他自动化供料设备为自动清洁装置100提供无尘布200。当红外接收器接收不到红外发射器发射的红外信号时,说明自动清洁装置100有可以使用的无尘布200。
可以理解地,在其他的实施例中,检测器91还可以通过检测连接件92设置于支撑基板61上,检测连接件92大致为板状或杆状。检测器91还可以为距离传感器、工业相机等可以检测无尘布200的设备。
请一并参阅图1和图3,在一些实施例中,移载机构50还包括吸附组件52和连接杆53。吸附组件52包括吸附基板521、多个吸附件522和多个止挡件523。
吸附基板521大致为板状,吸附基板521通过连接杆53与机械手51连接。多个吸附件522和多个止挡件523设置于吸附基板521的同侧,多个吸附件522用于吸附产品,多个吸附件522相对于吸附基板521凸出于多个止挡件523,可以理解为吸附件522先与产品接触。如此,吸附组件52吸附产品时,可通过多个止挡件523对产品的运动范围进行止挡,避免因吸附件522的吸附力太强而使产品过度运动以损坏产品;通过多个止挡件523,还可以使产品保持相对齐平,有利于带动产品进行仿形运动以提升清洁效果。
在一些实施方式中,吸附件522可以为吸嘴,吸附件522可以与自动清洁装置100自带或外接的一负压装置(图未示)连接,止挡件523大致为柱状,止挡件523可以为橡胶或其他具有弹性的物料。吸附件522和止挡件523的数量可以均为四个,且均匀地设置于吸附基板521的同侧。
可以理解地,在其他的实施方式中,止挡件523和吸附件522的数量还可以均为两个、三个、五个或更多个。止挡件523和吸附件522的数量可以相等,也可以不相等,例如,吸附件522的数量为四个,止挡件523的数量为三个。
一些实施例提供的自动清洁装置100的一实施过程大致为:首先,将缠绕无尘布200的滚筒13转动地设置于支架62上,使用机械装置或人工将无尘布200依次穿设第五辊125、第四辊124、第三辊123,并从第一辊121与第二辊122之间穿设出,检测器91检测到无尘布200后可以进行清洁作业。然后,供给驱动件11驱动第一辊121转动,进而通过第一辊121与第二辊122的啮合带动无尘布200进行移动。接着,喷洒头21向移动中的无尘布200喷洒清洁液,无尘布200喷洒清洁液的区域与第一仿形擦拭头41相对应;同时,移载机构50通过吸附组件52吸附产品。接着,一对夹持组件31在供给驱动件11的配合下对移动中的无尘布200进行制动,使得无尘布200停止移动,并使一对夹持组件31之间的无尘布200处于张紧的状态。接着,移载机构50带动产品移动至无尘布200与擦拭机构40相对应的位置;同时,一擦拭驱动件43驱动第一仿形擦拭头41朝靠近无尘布200的方向移动,直至第一仿形擦拭头41与无尘布200相抵接。接着,移载机构50带动产品在与第一仿形擦拭头41相对应的无尘布200上进行仿形运动,在第一仿形擦拭头41的配合下对产品进行湿擦。接着,湿擦结束后,一擦拭驱动件43驱动第一仿形擦拭头41朝远离无尘布200的方向移动,另一擦拭驱动件43驱动第二仿形擦拭头42朝靠近无尘布200的方向移动,直至第一仿形擦拭头41与无尘布200相抵接。接着,移载机构50带动产品在与第二仿形擦拭头42相对应的无尘布200上进行仿形运动,在第二仿形擦拭头42的配合下对产品进行干擦。接着,干擦结束后,另一擦拭驱动件43驱动第二仿形擦拭头42朝远离无尘布200的方向移动。接着,移载机构50带动产品依次移动至风干机构80及吸尘机构70处进行风干和吸尘;同时,一对夹持组件31松开无尘布200,供给驱动件11驱动第一辊121继续转动,使得无尘布200继续移动。接着,移载机构50带动清洁后的产品进行下料并重新吸附新的需要进行清洁的产品。如此往复,实现对产品表面不良因素的自动化清洁及深度清洁。
可以理解地,在其他的实施例中,一对擦拭驱动件43还可以同时驱动第一仿形擦拭头41和第二仿形擦拭头42朝靠近无尘布200的方向移动,直至第一仿形擦拭头41和第二仿形擦拭头42均与无尘布200相抵接。
本申请实施例提供的自动清洁装置100,通过供给机构10、喷洒机构20、制动机构30、擦拭机构40、移载机构50及可选的检测机构90之间的配合,实现了产品表面不良因素的自动化清洁及深度清洁,产品表面清洁后的良率高,清洁效果好,无需人工清洁产品,降低了人力成本。
对于本领域技术人员而言,显然本申请不限于上述示范性实施例的细节,而且在不背离本申请的精神或基本特征的情况下,能够以其他的具体形式实现本申请。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本申请的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本申请内。
最后应说明的是,以上实施例仅用以说明本申请的技术方案而非限制,尽管参照较佳实施例对本申请进行了详细说明,本领域的普通技术人员应当理解,可以对本申请的技术方案进行修改或等同替换,而不脱离本申请技术方案的精神和范围。
Claims (10)
1.一种自动清洁装置,用于对产品进行清洁,其特征在于,包括:
供给机构,包括供给驱动件和用于输送无尘布的传送辊组件,所述供给驱动件与所述传送辊组件连接并用于驱动所述传送辊组件转动,以使所述传送辊组件带动所述无尘布移动;
喷洒机构,包括喷洒头,所述喷洒头与所述无尘布进行移动的区域对应设置,所述喷洒头用于向移动中的所述无尘布喷洒清洁液;
制动机构,包括制动驱动件和与所述制动驱动件连接的制动件,所述制动驱动件用于驱动所述制动件靠近所述无尘布以按压所述无尘布,并与所述供给驱动件配合,以使所述无尘布停止移动;
擦拭机构,包括仿形擦拭头,所述仿形擦拭头与所述无尘布进行移动的区域对应设置;及
移载机构,包括机械手,所述机械手用于对产品进行移载,以在所述无尘布停止移动时,与所述仿形擦拭头配合对所述产品进行清洁。
2.如权利要求1所述的自动清洁装置,其特征在于,
所述供给机构还包括滚筒,所述无尘布缠绕于所述滚筒并可跟随所述滚筒转动;
所述传送辊组件包括第一辊、第二辊、第三辊、第四辊和第五辊;
所述第一辊与所述供给驱动件连接并与所述第二辊相对设置;
所述第一辊、所述第三辊、所述第四辊和所述第五辊沿所述无尘布的移动方向间隔设置;其中,
所述无尘布依次经所述第五辊、所述第四辊、所述第三辊后进入所述第一辊与所述第二辊之间。
3.如权利要求1所述的自动清洁装置,其特征在于,
所述制动机构还包括支撑件;
所述支撑件和所述制动件分别设置于所述无尘布进行移动的区域的相对两侧;其中,
所述制动驱动件驱动所述制动件靠近或远离所述支撑件,以压紧或松开所述无尘布。
4.如权利要求3所述的自动清洁装置,其特征在于,
所述制动机构还包括弹性件,所述弹性件与所述制动件连接且远离所述制动驱动件,所述弹性件用于弹性接触所述无尘布。
5.如权利要求4所述的自动清洁装置,其特征在于,
所述制动驱动件、所述制动件、所述弹性件及所述支撑件构成夹持组件,所述夹持组件的数量为一对,一对所述夹持组件沿所述无尘布的移动方向间隔设置;其中,
所述擦拭机构位于一对所述夹持组件之间。
6.如权利要求1所述的自动清洁装置,其特征在于,
所述擦拭机构还包括与所述仿形擦拭头连接的擦拭驱动件,所述擦拭驱动件用于驱动所述仿形擦拭头靠近或远离所述无尘布。
7.如权利要求1所述的自动清洁装置,其特征在于,
所述自动清洁装置还包括检测机构,所述检测机构包括检测器,所述检测器与所述无尘布进行移动的区域对应设置,用于检测所述无尘布。
8.如权利要求1所述的自动清洁装置,其特征在于,
所述移载机构还包括吸附组件,所述吸附组件包括:
吸附基板,与所述机械手连接;
设于所述吸附基板同侧的多个吸附件和多个止挡件,所述多个吸附件用于吸附所述产品,所述多个吸附件相对于所述吸附基板凸出于所述多个止挡件。
9.如权利要求1所述的自动清洁装置,其特征在于,
所述自动清洁装置还包括吸尘机构,所述吸尘机构邻近所述移载机构设置,用于吸取所述产品上的异物。
10.如权利要求1所述的自动清洁装置,其特征在于,
所述自动清洁装置还包括风干机构,所述风干机构邻近所述移载机构设置,用于烘干所述产品。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202123291982.9U CN217141403U (zh) | 2021-12-25 | 2021-12-25 | 自动清洁装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202123291982.9U CN217141403U (zh) | 2021-12-25 | 2021-12-25 | 自动清洁装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN217141403U true CN217141403U (zh) | 2022-08-09 |
Family
ID=82687575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202123291982.9U Active CN217141403U (zh) | 2021-12-25 | 2021-12-25 | 自动清洁装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN217141403U (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115365187A (zh) * | 2022-09-06 | 2022-11-22 | 苏州德机自动化科技有限公司 | 一种电子产品边框擦拭设备 |
| CN115870295A (zh) * | 2022-12-05 | 2023-03-31 | 苏州天准科技股份有限公司 | 用于载具中玻璃镜片的下表面全自动清洁装置和清洁方法 |
| CN116116776A (zh) * | 2022-12-10 | 2023-05-16 | 富联裕展科技(河南)有限公司 | 清洁设备 |
-
2021
- 2021-12-25 CN CN202123291982.9U patent/CN217141403U/zh active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115365187A (zh) * | 2022-09-06 | 2022-11-22 | 苏州德机自动化科技有限公司 | 一种电子产品边框擦拭设备 |
| CN115365187B (zh) * | 2022-09-06 | 2024-05-14 | 苏州德机自动化科技有限公司 | 一种电子产品边框擦拭设备 |
| CN115870295A (zh) * | 2022-12-05 | 2023-03-31 | 苏州天准科技股份有限公司 | 用于载具中玻璃镜片的下表面全自动清洁装置和清洁方法 |
| CN115870295B (zh) * | 2022-12-05 | 2023-10-03 | 苏州天准科技股份有限公司 | 用于载具中玻璃镜片的下表面全自动清洁装置和清洁方法 |
| CN116116776A (zh) * | 2022-12-10 | 2023-05-16 | 富联裕展科技(河南)有限公司 | 清洁设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN217141403U (zh) | 自动清洁装置 | |
| CN112170386B (zh) | 一种背靠背手机后盖板清洗机 | |
| CN103447263B (zh) | 盖板清洗机 | |
| CN112340455B (zh) | 一种为玻璃工件贴偏光片的贴片生产线 | |
| CN114247666B (zh) | 一种清洁设备及清洁方法 | |
| CN112570320A (zh) | 一种电气工程用线路板清洁除尘设备 | |
| CN114713534A (zh) | 电池注液口擦拭装置 | |
| CN211167722U (zh) | 一种清洁撕膜贴附设备 | |
| CN215394548U (zh) | 一种异形研磨清洗机 | |
| CN113210307A (zh) | 一种擦拭机构 | |
| CN220086013U (zh) | 一种半导体封装用多维度转运机构 | |
| CN111703182B (zh) | 一种用于为玻璃工件贴偏光片的贴片设备及工艺 | |
| CN218591219U (zh) | 清洗装置及中框清洗设备 | |
| CN212889363U (zh) | 一种用于为玻璃工件贴偏光片的贴片设备 | |
| CN212889362U (zh) | 一种偏光片贴头机构及玻璃工件贴偏光片设备 | |
| CN216225876U (zh) | 电路板清洁装置 | |
| CN110844230A (zh) | 一种清洁撕膜贴附设备 | |
| CN217748210U (zh) | 一种液晶屏擦拭烘干装置 | |
| CN216175137U (zh) | 清洁设备 | |
| CN213198040U (zh) | 一种高速封边机 | |
| CN213924479U (zh) | 热弯机上下料清洁装置 | |
| CN212732782U (zh) | 一种用于液晶玻璃生产线上的涂胶系统 | |
| CN113198782A (zh) | 一种手机清洁装置 | |
| JP4189946B2 (ja) | ノズルの清掃ユニットを有する装着機 | |
| CN212889360U (zh) | 一种玻璃工件中间翻转装置及玻璃工件贴偏光片设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder | ||
| CP01 | Change in the name or title of a patent holder |
Address after: 451162 the second and third floors of building B07, zone B, comprehensive bonded zone, east side of Zhenxing Road, Hangkong District, Zhengzhou City, Henan Province Patentee after: Fulian Yuzhan Technology (Henan) Co.,Ltd. Address before: 451162 the second and third floors of building B07, zone B, comprehensive bonded zone, east side of Zhenxing Road, Hangkong District, Zhengzhou City, Henan Province Patentee before: HENAN YUZHAN PRECISION TECHNOLOGY Co.,Ltd. |