CN1288587C - 激光枪及其射击系统 - Google Patents
激光枪及其射击系统 Download PDFInfo
- Publication number
- CN1288587C CN1288587C CNB021271003A CN02127100A CN1288587C CN 1288587 C CN1288587 C CN 1288587C CN B021271003 A CNB021271003 A CN B021271003A CN 02127100 A CN02127100 A CN 02127100A CN 1288587 C CN1288587 C CN 1288587C
- Authority
- CN
- China
- Prior art keywords
- bullet
- signal
- laser beam
- beam bullet
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41A—FUNCTIONAL FEATURES OR DETAILS COMMON TO BOTH SMALLARMS AND ORDNANCE, e.g. CANNONS; MOUNTINGS FOR SMALLARMS OR ORDNANCE
- F41A33/00—Adaptations for training; Gun simulators
- F41A33/02—Light- or radiation-emitting guns ; Light- or radiation-sensitive guns; Cartridges carrying light emitting sources, e.g. laser
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41A—FUNCTIONAL FEATURES OR DETAILS COMMON TO BOTH SMALLARMS AND ORDNANCE, e.g. CANNONS; MOUNTINGS FOR SMALLARMS OR ORDNANCE
- F41A33/00—Adaptations for training; Gun simulators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/26—Teaching or practice apparatus for gun-aiming or gun-laying
- F41G3/2616—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device
- F41G3/2622—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device for simulating the firing of a gun or the trajectory of a projectile
- F41G3/2655—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device for simulating the firing of a gun or the trajectory of a projectile in which the light beam is sent from the weapon to the target
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/26—Teaching or practice apparatus for gun-aiming or gun-laying
- F41G3/2616—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device
- F41G3/2622—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device for simulating the firing of a gun or the trajectory of a projectile
- F41G3/2666—Teaching or practice apparatus for gun-aiming or gun-laying using a light emitting device for simulating the firing of a gun or the trajectory of a projectile with means for selecting or varying PRF or time coding of the emitted beam
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41J—TARGETS; TARGET RANGES; BULLET CATCHERS
- F41J5/00—Target indicating systems; Target-hit or score detecting systems
- F41J5/02—Photo-electric hit-detector systems
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Toys (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
Abstract
一种射击系统,包括:激光枪(7)和靶设备(2),其中所述靶设备包括:与所述激光枪无线连接的靶端通信单元(14),用于向激光枪输出准射信号;靶(4);和与靶光学连接的光接收单元67,用于接收激光束子弹;以及电连接到光接收单元的检测单元(54、55),用于检测激光束子弹的弹着位置,所述激光枪包括:枪端通信单元(43),用于接收从靶端通信单元发出的准射信号;和枪体部(42),用以基于所述准射信号输出激光束子弹。
Description
技术领域
本发明涉及一种激光枪,及其射击系统。
背景技术
射击比赛运动是公知的。在这种射击比赛运动中,有人希望用激光枪取代在安全管理上需要十分小心的实弹射击的枪支。现有各种类型的激光枪,例如使用为射击运动开发的闪光的激光枪,和用于练习并且连接带电缆的计算机以显示弹着的激光枪。
已经提出了激光枪不应当连接电缆的要求。还提出了在激光枪与枪靶之间建立更加严格的一对一关系的要求。因此,希望提供一种光学系统,用之提高检测激光束弹着位置的精度。而且,保证发射激光束的激光枪的安全性是很重要的。这些要求需加以满足,还要提高得分计算程序的精度及速度。
用得分计算程序,需要由靶上的多个点的位置坐标计算激光枪发射的圆锥形闪光的截面中心点。然而在使用闪光枪的射击系统中击中位置的判断精度的提高是有限的。
在用电缆连接计算机的激光枪中,缆线影响射手已经很敏锐了的感官,并且有碍于射手的精神稳定性和注意力集中。还有可能使激光枪射手改变枪处理激光束击中位置的数据。而另一方面,如果由组织者保管枪或其部件,射手就不能够进行练习。
因此不易于用这种激光枪进行射击比赛运动。在现有的方法中,激光束子弹可能命中邻近的靶,这样初学者可能会干扰相邻使用者。另外,从平稳地管理射击比赛的角度讲,公平计算得分、比赛开始前的准备、组织良好的得分显示等等其他因素对于射击系统也是非常重要的。
发明内容
本发明的目的是提供一种激光枪和使用该激光枪的射击系统,其中枪和计算机通过无线连接。
本发明另一个目的是提供一种激光枪和使用该激光枪的射击系统,其中严格地约束激光束子弹的操作。
本发明另一个目的是提供一种激光枪和使用该激光枪的射击系统,其中可以确保激光枪的安全。
本发明另一个目的是提供一种激光枪和使用该激光枪的射击系统,其实现了对击中位置判断精度的改进并提高了得分计算程序的速度。
本发明另一个目的是提供一种射击系统,其中提供一种使用激光束子弹的射击运动的新技术。
本发明另一个目的是在上述射击系统中提供一种感光装置(PSD)调节器,这种调节器可以改进激光束击中位置判断的精确度。
在本发明的一个方面,射击系统包括激光枪和靶设备。该靶设备包括:与激光枪无线连接的靶端通信单元,用于向激光枪输出准射信号(permission signal);靶;与靶连接的光接收单元,用于接收激光束子弹,和电连接到光接收单元的检测单元,用于检测激光束子弹的弹着位置。所述激光枪包括:扳机、枪端通信单元、击发信号发生电路和枪体部。所述枪端通信单元用于接收从靶端通信单元发出的准射信号。所述击发信号发生电路响应所述扳机的操作,基于所述准射信号产生击发信号。所述枪体部用以响应所述击发信号输出所述激光束子弹。
此外,准射信号需要具有对激光枪的方向性。在这种情况下,靶端通信单元可以包括输出圆锥形光束的光发射装置,及赋与发射信号方向性的裂隙。
此外,激光束子弹可以包括:弹着位置信号,用于检测激光束子弹的弹着位置;和激光束子弹辨别信号,用于辨别激光束子弹。
此外,准射信号可以包括激光束子弹输出的条件。在此情况下,所述条件可以是准射信号的脉冲宽度。
另外,激光束子弹可以包括多个基本子弹。激光束子弹辨别信号可以包括与多个基本子弹中的第一个相关联的第一子弹辨别信号,和与多个基本子弹的第二个相关联,并且接在第一子弹辨别信号之后的第二子弹辨别信号。第一子弹辨别信号接在弹着位置信号之后。在此情况下,第一子弹辨别信号可以包括与第一个基本子弹关联的第一子弹内信号和指示出第一基本子弹属于激光束子弹的第一公共信号。第二子弹辨别信号可以包括与第二个基本子弹关联的第二子弹内信号和指示出第二基本子弹属于激光束子弹的第二公共信号。第一公共信号与第二公共信号等同。还有,每个第一子弹内信号和第二子弹内信号,及每个第一公共信号与第二公共信号都用相同的第二位数表达。第一位数是2,而第二位数是6。
同时,激光束子弹的得分可以相对第一和第二公共信号,基于第一激光束子弹辨别信号和第二激光束子弹辨别信号的至少一个计算成一个得分。
还有,激光束子弹可以包括多个基本子弹。多个基本子弹的每个可以包括:弹着位置信号,用于检测相应的基本子弹的弹着位置;与对应的基本子弹相关联的子弹内辨别信号;以及公共信号,指示出相应的基本子弹属于该激光束子弹。在此情况下,得分可以基于多个子弹内辨别信号计算作为与公共信号相关的一个得分。还有得分按多个子弹内辨别信号的平均得分计算。在多个弹着位置信号的弹着位置上进行弹痕标记。还有可以根据多个弹着位置信号的弹着位置之间的相对位置关系得出得分。
还有靶设备还可以包括灯,提示射手准射信号的发送。
再有,激光枪还可以包括选择开关,用之进行模式之间的选择,而所述模式包括发出激光束子弹的实射模式,和发出不同于激光子弹的光学信号的试射模式。在此情况下,激光束子弹的所述不同光学信号可以是通过修改公共信号得到的信号。另外,激光束子弹的所述不同光学信号可以是通过修改多个弹内公共信号中相应的一个得到的信号。
在本发明的另一个方面,信号处理方法的实现是通过:(a)从靶设备向激光枪无线发送准射信号;(b)由激光枪接收所述准射信号;(c)响应接收的准射信号,从激光枪发出激光束子弹;及(d)由靶设备接收激光束子弹,使得可以检测激光束子弹的弹着位置。
发光步骤(c)可以通过对激光束子弹附加子弹定时信号而实现。在此情况下,信号处理方法可以进一步包括步骤(e):在靶设备中根据弹着位置检测信号检测激光束子弹的弹着位置。在此情况下,发光步骤(c)还可以向激光束子弹附加激光束子弹辨别信号,所述辨别信号用于把该激光束子弹与其它激光束子弹相区别。另外,激光束子弹辨别信号可以由射手抠动扳机的动作产生。
此外,激光束子弹可以包括多个基本子弹。在此情况下,激光束子弹辨别信号可以包括多个子弹辨别信号,这些子弹辨别信号以串行序列输出给弹着位置检测信号,并且这些子弹辨别信号与多个基本子弹对应。在此情况下,多个子弹辨别信号的每个包括基本子弹编号信号,指示出相应的多个基本子弹中的一个,以及公共信号,指示出相应的基本子弹属于该激光束子弹。所述的信号处理方法还可以包括步骤(f),计算该激光束子弹的多个基本子弹的平均得分。
还有,所述(a)步骤可以通过向激光枪发送方向性的准射信号而实现。
再有,信号处理方法还可以包括步骤(g):调节靶设备的位置,所述靶设备可包括具有照射点的机械坐标(x,y)的靶,以及接收照射点位置的激光束子弹并且输出电坐标(x’,y’) (信号)的二维光接收单元。在此情况下,所述的(g)调节步骤可以基于机械坐标(x,y)通过调节电坐标(x’,y’)的步骤(h)实现。另外,调节步骤(h)可以通过步骤(i)调节靶与二维光接收单元之间的相对位置而实现,使电坐标(x’,y’)与靶中心点的机械坐标(0,0)相一致。在此情况下,调节步骤(h)可以通过步骤(j)改变照射点的位置,和通过步骤(k)用数学方法调节电坐标(x’,y’),使电坐标(x’,y’)与改变后的照射点位置的机械坐标(x,y)相一致而实现。改变步骤(j)和数学调节步骤(k)可以在机械坐标(x,y)的坐标系统上的多个区域独立地执行。
附图说明
图1示出根据本发明的第一实施例的使用激光枪的射击系统的多个射击位和多个射击位置检测器的布局。
图2是射击位置检测器的侧截面图;
图3是射击位置检测器的正视图;
图4是从红外线发光二极管发出红外光的图示;
图5是激光枪枪管体部的侧截面图;
图6是枪管体部下表面部分平面图;
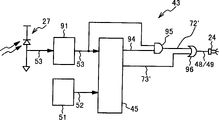
图7是根据本发明的第一实施例激光枪射击系统的方框图;
图8A至图8E是图7所示的射击系统中圆锥形光束和各种信号的时序图;
图9A至9E是比特图,分别示出激光束子弹的各信号;
图10A至图10D为图8B所示信号部分的时序图;
图11A至11E是数据转换的时序图;
图12是示出激光枪中激光束子弹发生电路的电路方框图;
图13是射击系统中靶板的正视图;以及
图14是根据本发明的第二实施例的射击系统的系统方框图。
具体实施方式
下面参照附图详细说明本发明的激光枪及使用该激光枪的系统。
图1示出根据本发明的第一实施例的使用激光枪的射击系统的多个射击位和多个靶击位置检测器2的布局。在图1中,一枪对应一靶。参照图1,射击位1的数量例举的是五个,而靶击位置检测器2的数量例举的也是五个。即,对多个射击位1中的每一个都提供一个靶击位置检测器2。射击位靶击位置检测器2在此例中,绝不会从一个射击位1向多个靶击位置检测器2发出激光束子弹。即使出现这样的情况,也不会检出这样的激光束子弹或者说使之失效,如下文所述。
每个射击位1由两个隔板3隔开。为多个射击位1形成一个公共的射击容限平面6。在此公共的射击容限平面6上,在一枪对一靶的情况下,每个射击位1的横向宽度是1米,而在一枪对多靶的情况下可以不同地确定。在射击位1中用激光枪7射出激光束子弹。
每个靶击位置检测器2检测激光束子弹的弹着位置。在每个靶击位置检测器2的前面各固定一个方形或者圆形的靶板4。多个靶板的前表面形成一个公共平面5。该公共平面5与公共的射击容限平面6彼此平行并且两者都是竖直的。在公共平面5与公共的射击容限平面6之间的距离在此例举的是10米或者25米,这取决于射击运动的类型。每相邻的两个靶击位置检测器2的中心线之间的距离在此例举的是1米。根据射击运动的规则,只要该枪朝着靶击位置检测器2的方向不超过公共的射击容限平面6,激光枪7就可以在相邻的两个隔板3之间自由地使用。
靶击位置检测器2发出由红外线发光二极管产生的圆锥光束、椭圆锥光束和角锥形光束之类的圆锥形光束8。从五个靶击位置检测器2发射出的每个圆锥形光束8各达到相应的射击位1,而原则上不达到两个射击位。从激光枪7发出激光束子弹9具有属于激光枪7的固有信号。激光束子弹9有高度平行的通量特性,并且通过下文要说明的透镜以光点的形式到达对应的靶击位置检测器2的靶板4。
圆锥光束8包括激光发射准许信号,并且由激光枪7的接收部分接收。圆锥光束8的脉冲宽度对于所述的靶击位置检测器2是特有的,并且相邻的圆锥光束有彼此不同的脉冲宽度。
图2是靶击位置检测器2的侧截面图。设计和组装靶击位置检测器2的壳体和内部支承结构以达到高度刚性,从而可以把热变形的幅度限制在容限范围之内。靶击位置检测器2除了靶板4之外还含有位置检测光学元件11。位置检测光学元件11含有聚光透镜12和位置检测半导体元件13。电荷耦合器件(CCD器件)或者光敏器件(PSD器件)公知为位置检测半导体元件13。在此例中,从成本和检测速度的角度讲,优选地用PSD器件13作位置检测半导体元件13。靶击位置检测器2还含有红外线发光二极管14。
PSD器件13有二维电流发生膜。当二维电流发生膜被靶板4和聚光镜12聚光的激光束子弹射中时,PSD器件13产生沿x轴的相反方向的电流Ix1和Ix2,还产生沿y轴的相反方向的电流Iy1和Iy2。激光束子弹弹着位置的光束点的坐标(x,y)由下式表达:
X=k(Ix2-Ix1)/(Ix2+Ix1)
Y=k(Iy2-Iy1)/(Iy2+Iy1) (1)
因此,可以计算并确定光束点的坐标(x,y)。(Ix2-Ix1)和(Iy2-Iy1)两者都为零的位置被确定为PSD器件13的机械坐标原点(0,0)。机械坐标原点是上述定义的坐标值为零的位置,并且是PSD器件13的电子中心点。机械坐标原点固定在靶击位置检测器2的壳体结构上。靶板4在相对PSD器件13所限定的精度容差范围内以二维形式定位。
靶板4有光散射的可透射膜。从激光枪1发射出的激光束子弹达到靶板4,并且在光散射可透射膜上形成约1毫米直径的大体上为圆形的图像。大体上为圆形的图像由聚光镜12聚光,并且在PSD器件13的二维的电流发生膜上形成点状的真实光束像。为了由PSD器件13产生的四个电流值各自超过阈值,由PSD器件13接收的激光束的光量必须大于所述阈值。为此,下文要说明的光脉冲的宽度必须大于一定的宽度。然而,增加所述脉冲宽度意味着从光束子弹到达至激光束子弹的弹着位置的位置检测的周期加长了。
从成本的角度讲,靶击位置检测器2采用红外线发光二极管14是有利的。然而适于长距离发送的发光二极管发光速度慢,而发光速度快的发光二极管不适于长距离发送。考虑到这样的特性,25米的长距离发送可以采用多个发光二极管。使用多个发光二极管显得发光速度快了。
红外线透射窗口形成的裂隙15固定在靶击位置检测器2壳体的前部,并且有竖直方向细长的椭圆形状。从而可以自由地调节裂隙的位置。红外线透射窗口形成的裂隙15可以与靶击位置检测器2分离。优选地多个红外线透射窗口形成的裂隙15是可分离的,并且按射击运动的类型选择一个裂隙15。如果提供多个射击位,可以自由地进行修改使之可以在安置裂隙15的竖直平面上水平地移动红外线透射窗口形成的裂隙15,并且可以把红外线透射窗口形成的裂隙15固定在靶击位置检测器2的壳体上的多个位置。
发射圆锥光束8的红外线发光二极管14的发射区不是一点区而是多点区。通过在红外线发光二极管14的前面设透镜系统(未示),可以把红外线发光二极管14的发射区看成单点区而不是多点区。图4示出红外线发光二极管14的发射。参见图4,由点P代表所述点区。从红外线发光二极管14发出的光束的中线作为红外线光束的光轴,包括交点P、以直角与公共平面5相交的交点、以及与公共射击容限平面6相交于Q点。红外线透射窗口裂隙15的水平宽度用”d”标记。该裂隙与公共射击容限平面6之间的距离用D标记。点P与公共平面5之间的距离用”X”标记。射击位1的水平宽度用”a”标记。尽管所述裂隙的宽度依特定的靶击位置检测器2与特定的射击位1之间的角位置关系而异,然而裂隙宽度d基于下面的表达式的比例关系以非常良好的近似用几何光学方式进行表达。
a/2(X+D)=d/2x
由此得到:
d=aX/(X+D) (2)
在以上公式(2)中,”a”和“D”是预定的值,而“X”是设计值。由公式(2)确定红外线透射窗口形成裂隙15的宽度d。沿高度方向的红外线透射窗口形成裂隙15的宽度参照射手在射击时伸出其手臂的手的高度位置而确定,或者参照当射手把枪托放在肩上看着瞄准朝向靶子的视线的时候,枪管体位置的高度而确定。
图3是靶击位置检测器2的正视图。参照图3,在靶板4的多个位置上,在靶击位置检测器2的前部设置定位孔17。定位孔17用于按基于上述靶击位置检测器2的机械坐标原点定义的三维坐标系统高精度地定位靶板4的位置。尽管需要按照射击运动的类型更换靶板4,但通过把销钉插入双侧的定位孔17,新更换的靶板4总是可以相对于PSD器件13的机械坐标原点严格而可调节地进行三维定位。
锥形的罩18连接在靶板4和聚光透镜12之间,锥形的罩18形成一个暗箱防止由靶板4散射的散射光成为杂光进入聚光透镜12。聚光透镜12和PSD器件13附着在安装板19上。安装板19用栓钉21牢固地附着在靶击位置检测器2的壳体上,具有高度的刚性,如图3所示。靶击位置检测器2内部包括风冷窗口和后文详细说明的各种电子电路单元,并且安装在牢靠固定着的基座(未示)上,从而把靶板的靶心点设定在确定的高度位置。
图5示出激光枪7的枪管体部23,但略去了枪柄部分。用半导体激光振荡元件24作可见光或者红外光光源。设有光束调节透镜25,以均衡由半导体激光振荡元件24产生的多重发光点,并且在10米的距离处给出适当的光束直径。光束调节器透镜25设置得与半导体激光振荡元件24的光轴26同轴。
在枪管体部23前部的下部设有光电二极管27。光电二极管27经在枪管体部23的前端部开放的红外线接收口28,接收从靶击位置检测器2的红外线发光二极管14发射的圆锥形光束8的一部分。设有射击状态指示发光二极管24,该发光二极管露出在枪管体部23的下表面部。在枪管体部23的上部(上半区)中含有多个电池31,并使之易于更换。枪管主体23的重心借助稳定器36调节。在枪管体部23的下表面部设有电源通/断开关32。接通电源开关32后,射击状态指示发光二极管29连续地发光。当光电二极管27接收到圆锥光束的激光发射准许信号53后,射击状态指示发光二极管29可发出闪烁的光或连续的光。射击状态发光二极管29的连续光的颜色优选地改变成冷色,从而不使射手分心。当射手抠动扳机(未示)时,半导体激光振荡元件24沿光轴26发射出激光束子弹34,包括后文要说明的控制电路定义的光束子弹信号33。稳定器36可旋转地连接在枪管体部23上,并且可以固定在任意的旋转位置。射手的肉眼光轴37经过附着在枪管体部23的前部上端表面部上的十字线瞄准具38的交点瞄向枪靶。
为不同的击发操作准备了激光枪7的三个操作模式。
第一模式是实射模式,其中仅在经红外线接收口28接收到圆锥光束8的一部分时,实际地发射出激光子弹34,所述激光子弹34包括激光枪7固有的光束子弹信号33。
第二模式是试射模式,其中仅在经红外线接收口28接收到圆锥光束8的一部分时,实际地发射出激光子弹,所述激光子弹包括光束子弹信号33和使激光束子弹失效的无效信号。无效信号可以当作不包含在激光束子弹中的生效信号的信号,或者作为其中含有生效信号的变形的所述激光束子弹的信号。例如为了达到这样的失效,把后文要参照图9C说明的信号75-1-1设定到“00”。
变通地,可以把信号75-1-2改变成“000000”。激光束子弹可以方便地用无效实弹取代有效实弹。通过使用这样的信号,第二模式中使用的激光束子弹可以与第一模式中使用的激光束子弹区别开。
第三模式是触感检查模式,其中仅检查抠动扳机的操作,而不发射实弹。从而可以确保安全性。
在实射模式与试射模式之间的选择,通过转换设在枪管体部23的下表面部的模式选择开关39的位置进行,如图6所示。采取这种类型的推动开关使射手能够检查开关的模式选择位置。开关和灯应当优选地设置在沿垂直于肉眼光轴37的上和下对置侧。还有,优选地,在肉眼光轴37附近不应当存在任何引人注目的目标,特别是灯。
图7示出根据本发明的第一实施例使用激光枪的射击系统。如前述本系统包括激光枪7和靶击位置检测器2。靶击位置检测器2通过圆锥光束8和激光枪7发出的激光束子弹34执行双向通信。激光枪7包括激光二极管(LD)单元42和LD板43。激光二极管单元42包括半导体激光振荡元件24和光束调节透镜25。
激光枪7的电池3 1的电源经LD板43和电源通/断开关32向LD单元42供电。LD板43包括直流/直流(D/D)变换器44和光束子弹信号输出控制单元45。电池31的直流电源经D/D变换器44向光束子弹信号输出控制单元45和LD单元42供电。模式选择开关39基于对其操作产生模式选择信号47。模式选择信号47提供给光束子弹信号输出控制单元45。激光束子弹输出控制单元45向LD单元42在实射模式时输出第一激光发生电流48,或在试射模式时输出第二激光发生电流49。LD单元42按第一激光发生电流48和第二激光发生电流49输出激光束子弹。如果不向激光束子弹信号输出控制单元45提供电击发信号52,就不产生第一激光发生电流48或第二激光发生电流49。抠动扳机时,由击发信号发生器51输出电击发信号52。另外,如果没有向激光束子弹信号输出控制单元45提供基于对圆锥光束8的接收而产生的激光发射准许信号53,就不会产生第一激光发生电流48或第二激光发生电流49。因此激光束子弹不会从没有处在射击位1中的任何激光枪7射出,从而可以确保安全性。
靶击位置检测器2包括靶板4、光敏二极管(PSD)器件13,和红外线发光二极管14。靶击位置检测器2还包括发射/接收信号控制部54和系统控制CPU55。发射/接收信号控制部54有发射/接收信号控制单元56和D/D变换器57。靶击位置检测器2经开关59连接公共电源58。来自公共电源58的电能经A/D变换器60提供给D/D变换器57和PSD器件13。接通绿色的射击准许指示灯61指示出射击准许状态,接通红色的射击禁止指示灯62指示射击禁止状态。指示灯61和62设在靶击位置检测器2的前壁的上部。
包括激光束子弹信号33的激光束子弹34受靶板4的散射。散射的光经聚光透镜12会聚在PSD器件13的光接收表面上。包括PSD器件13的PSD器件单元67去除诸如来自激光束子弹34的扰动之类的噪音,并且放大相应于接收的激光束子弹的信号,以向发射/接收信号控制单元56输出电流值信号63。电流值信号63对应于二维方向上的两对电流的电流值。该电流值由关于聚光点的前述公式(1)示出。发射/接收信号控制单元56执行绿色射击准许指示灯61的发光控制、红色的射击禁止指示灯62的发光控制和红外线发光二极管14的发射控制。处理电流值信号63产生子弹弹着值信号,该子弹弹着值信号传输给系统控制CPU55。特别地,系统控制CPU55基于子弹弹着状态值64执行得分计算和校正,并且控制设在靶击位置检测器2上的显示器(未示)。基于子弹弹着状态值64的得分计算和校正可以由经LAN65连接至系统控制CPU55的个人计算机66执行。如果由系统控制CPU55执行得分的计算和校正,得分计数结果直接显示在显示器(未示)上。
图8A至图8E示出激光发射准许信号53和激光束子弹信号33的时序。射手设定模式选择开关39选择是实射模式还是试射模式,然后把激光枪7带进射击位1。特别是当射手把枪7的枪口转向靶板4时,不由射手的意志所左右,激光枪7中的光电二极管27接收圆锥光束8的激光发射准许信号53。圆锥光束8按预定的5毫秒时间间隔从靶击位置检测器2发出,如图8A所示。每次接收到图8C中所示的圆锥光束中激光发射准许信号53时,发射一个子弹定时信号72。当抠动扳机时,从LD单元42发射出包括子弹定时信号72的激光束子弹34。子弹定时信号72由PSD器件13接收,作为子弹定时信号74,这是子弹射击信号。激光束子弹34射出多个基本激光束子弹73-1、73-2、73-3。基本激光束子弹的数量是预定的。多个基本激光束子弹73-1、73-2、73-3的每个含有子弹定时信号72。通过PSD器件单元67和发送/接收信号控制单元56与子弹定时信号74-1、74-2、74-3同步地把基本激光束子弹73-1、73-2、73-3转变成弹着位置检测值信号64,然后提供给系统控制CPU55。
如上所述,当射手抠动扳机(未示)以产生电击发信号52时,由半导体激光振荡元件24产生并且从激光枪7发射的激光束子弹识别信号73作为与子弹定时信号72对应的子弹属性信号。实射模式或者试射模式的激光束子弹34包含子弹定时信号72和激光束子弹识别信号73,如图8B和8D所示。PSD器件13接收子弹定时信号72并且对应于子弹定时信号72输出子弹定时信号74。如图8B和8D所示,PSD器件13接收子弹定时信号72和激光束子弹识别信号73并且对应于子弹定时信号72输出子弹定时信号74,而相应于激光束子弹识别信号73输出激光束子弹辨别信号75。作为子弹定时信号的子弹射击信号74转换成子弹弹着值信号64,子弹弹着值信号提供给系统控制CPU55。
如图8D和8E所示,基于单次击发操作,发射出三个激光束子弹识别信号73(73-1、73-2、73-3)。激光束子弹识别信号73-1是响应子弹定时信号72-1而发射的。另一个激光束子弹识别信号73-2响应另一个子弹定时信号72-2而发射。再一个激光束子弹识别信号73-3响应再一个子弹定时信号72-3发射。从而,基于单次击发操作,发射三次激光束子弹识别信号73。
作为位置检测半导体元件13的PSD器件,接收三组信号72和73,并且响应三组信号的第一个输出一组子弹发射信号74-1和激光束子弹辨别信号75-1,响应三组信号的第二个输出另一组子弹发射信号74-2和激光束子弹辨别信号75-3,及响应三组信号的第三个输出又一组子弹发射信号74-3和激光束子弹辨别信号75-3。三个信号75-1、75-2、75-3构成一个激光束子弹组。
图9A示出串行数据79的结构,这是弹着位置信号74和激光束子弹辨别信号75的基本比特格式。串行数据79的最高位81是起始位。串行数据79的末位82是停止位。图9B示出子弹射击信号74的比特格式。在最高位81和末位82之间的八个比特表达为(0,0,0,1,1,1,1,1)。考虑到红外线发光二极管14和光电二极管27的性能,包含起始位和三个有效比特的四个比特提供了至少有400微秒(μs)的脉冲宽度。
图9C、9D和9E示出激光束子弹辨别信号75的比特格式。激光束子弹辨别信号75包含第一组内激光束信号75-1、第二组内激光束信号75-2和第三组内激光束信号75-3。每个组内激光束子弹信号75中,在最高位81和末位82之间的八个比特中最高位侧的两个比特是组内识别信号,该信号表达为“1”、“2”或“3”,用于识别是否为组内基本激光束子弹辨别信号75-1、75-2和75-3。在信号74和信号75都是串行信号时,为了辨别这两个信号,第一组内激光束子弹信号75-1-1与第一公共信号75-1-2之间的时基次序关系优选地应当被反转,所述的关系将在下文中说明。最高位81和末位82之间的八个的末位侧的六个比特指示出激光束子弹34发射顺序识别编号,并且与击发操作的次数对应。在一个单元比赛中,可能发射63个以下的激光束子弹。在开始射击操作之前,所述的六个比特初始化为(0,0,0,0,0,0)。在一次比赛中,如公式(32+16+8+4+2+1)(=(64-1)所表达的,扳机可以抠动63次,从而可以射出63个激光束子弹34。图9C至9E示出子弹编号为“110000”,并且以第三个激光束子弹34为例。如图9B中所示的子弹定时信号74具有总脉冲宽度为400(μs),图9C和图9D中所示的激光束子弹组的第一和第二激光束子弹信号75-1及75-2具有总脉冲宽度为600(μs),而图9E中所示的击发特征信号75-3的总脉冲宽度为400(μs)。在此情况下,第一和第二激光束子弹信号75-1及75-2可以用于比赛,而击发特征信号75-3可以用于调整击发操作。对于所示的子弹编号,0用于表示有效信号而1表示无效信号。其二进制值是“110000”,而三个激光束子弹的子弹编号由(2+1)共同计算,因此得出3。
如上所示,第一组内激光束子弹信号75-1包含指示同一激光束子弹组的第一个的第一子弹组内信号75-1-1,及指示出对激光束子弹组的共同性的第一公共信号75-1-2。第二组内激光束子弹信号75-2包含指示激光束子弹组的第二个的第二子弹组内信号75-2-1,及指示出对激光束子弹组的共同性的第二公共信号75-2-2。第三组内激光束子弹信号75-3包含指示激光束子弹组的第三个的第三子弹组内信号75-3-1,及指示出对激光束子弹组的共同性的第三公共信号75-3-2。一般而言,第j组内激光束子弹信号75-j包含指示激光束子弹组的第j个的第j子弹组内信号75-j-1,及指示出对激光束子弹组的共同性的第j公共信号75-j-2。第一公共信号75-1-2的公共编号等于第二公共信号75-2-2的公共信号。
后文将说明,一旦抠动扳机,响应这一击发操作发射出多个基本激光束子弹。这样的发射像机关枪,但是不同于机关枪的是,单次瞬间击发操作发射多个激光束子弹。如后文所述,实现了不同于常规实弹射击枪的枪支。
第一子弹组内信号75-1-1、第二子弹组内信号75-2-1和第三子弹组内信号75-3-1由两个比特表达。第一公共信号75-1-2、第二公共信号75-2-2和第三公共信号75-3-2由六个比特表达。
子弹定时信号74的多个子弹通常使射击运动多样化。由于这种多样化,得分可以相对于以第一子弹组内信号75-1-1和第二子弹组内信号75-2-1为基础的共同数计算成一个得分。此外,此得分可以通过计算以第一子弹组内信号75-1-1为基础的得分和第二子弹组内信号75-2-1为基础的得分的平均值(而获得)。击发操作之后,在射手手指与枪管之间的微小的相对波动反映在得分上。在第一子弹弹着信号74-1的弹着位置和第二子弹弹着信号74-2的弹着位置之间画出一个弹痕标记。如果所述相对波动大得分就低。相反,如果相对波动小得分就高。
由于枪或光学系统的波动,不能保证三粒子弹击中同一点,因此所述得分不总是相等。由系统控制CPU55或者个人计算机66计算出三个子弹的三个坐标值的平均值。由系统控制CPU55计算相应于该平均值的得分。
基本子弹的数量可以更多。在此情况下,依从于第一子弹弹着信号74-1的弹着位置和第二子弹弹着信号74-2的弹着位置之间的相对位置关系得出得分。所述第一子弹弹着信号74-1和第二子弹弹着信号74-2是更多子弹弹着信号中的代表。
可以把多个激光束子弹的弹着位置的弹痕标记为多个点的序列。这种弹痕标记显示在射击运动埸中与靶板4分开的显示器上。
弹着位置的特性,诸如指示弹着位置序列聚集性的面积大小、到原点(即靶子中心)的平均距离、及对原点的角度分布的展开等,可以严格地表达,并且可以多样化地表达射手的手指与枪管之间的相对运动。这样的射击运动是常规的实弹射击比赛不能实现的。
如果不操作扳机,只要激光枪7的枪口对着靶板4,子弹定时信号74(74-1,74-2,和74-3)相继地由靶板4接收。与发射的子弹定时信号72相对应的子弹定时信号74的弹痕标记显示在显示器上。这种弹痕标记表示出射手的波动。射手可以抠动扳机,观察设在附近的屏幕等的显示表面上所显示的弹痕标记的波动。把这种弹痕标记投影到大屏幕上可以丰富对观众的服务。
图10A至图10D示出数据检测的时序。单个子弹定时信号74被放大并且显示在图10B至10D中。数据变换周期允许信号83由子弹定时信号74的下降沿起被延迟一个预定的时间。在输出下一个子弹定时信号74之前,与数据变换周期允许信号83的上升沿同步地产生数据变换周期信号84。子弹弹着位置坐标数据(X,Y)与数据变换周期信号84同步地被解释(interpreted)。子弹击中位置坐标数据(x,y)包括在电流值信号63中。弹着位置的坐标位置(x,y)由系统控制CPU55或者个人计算机66按前述公式(1)计算。把弹着位置的坐标数据(x,y)发送至个人计算机66并且储存在个人计算机66的存储部分中。而且该数据被实时地显示在射击运动埸中的显示单元(未示)的屏幕上。弹着位置坐标数据用于在输入基本激光束子弹时计分。
图11A至11E示出数据解释时序。如果数据转换周期允许信号83施加到控制单元56上,控制单元56产生数据转换周期信号84。输送至控制单元56的占忙信号85下降至“低”电平以停止红外线发光二极管14的输出。由传送/接收信号控制单元56产生第一转换数据选择信号86和第二转换数据选择信号87,并且加以复合。第一转换数据选择信号86和第二转换数据选择信号87有四个组合,用(0,0)、(0,1)、(1,0)、(1,1)表达。
如果组合是(0,0),则把弹着位置坐标数据(x,y)看作枪口指向靶子的弹痕标记。如果组合是(0,1),则把对应于弹着位置坐标数据(x,y)的x坐标值的信号传送至控制单元56。如果组合是(1,0),则把对应于y坐标值的信号传送至控制单元56。如果组合是(1,1),则把对应于x和y坐标值的各信号传送至控制单元56。在把弹着位置坐标数据(x,y)转换成坐标值的数据转换完成后,占忙信号85恢复为“高”电平的状态。
图12示出产生从激光枪7输出的子弹定时信号72和激光束子弹34的激光束子弹识别信号73的激光束子弹发生电路43。激光束子弹发生电路43包含放大器91,和击发信号发生电路51。放大器91放大光电二极管27输出的信号以产生同步信号53。击发信号产生电路51基于抠动扳机的操作产生击发信号52。光束子弹信号输出控制单元45接收同步信号53并且输出激光振荡电流94。同步信号53和输出激光振荡电流94施加在作为同步输出元件95的“与门”上。激光振荡电流94的一部分在相应于同步信号53的脉冲宽度的时间宽度上输出为对应于子弹定时信号72的激光束子弹对应功率72’。
基于击发信号52,由激光束子弹信号输出控制单元45产生对应于激光束子弹辨别信号73的激光束子弹对应功率。激光束子弹对应功率施加在起同步延迟元件96作用的“或门”上。基于同步延迟元件96的输出,半导体激光振荡元件24输出包括子弹定时信号72和激光束子弹辨别信号73的激光束子弹34。
图13示出靶板4的细节。在靶板4上,得分区划分成由十个同心圆表示的十个区域。最外边的环形区域给出1分的得分。中心的圆形区域给出10分得分。准备多个靶板4。如前文所述,组装的靶板4通过把销钉插入定位孔17以可更换的方式固定。
尽管靶板4各同心圆的几何精度相对于优秀射手的准确性充分地高,但PSD器件13的电气、机械和光学精度不够高。因此,通过调整保持以下装置足够高的精度是非常重要的:与PSD器件13相关的聚光透镜12的几何定位精度、聚光透镜12和PSD器件组装的机械精度、以及基于PSD器件13失真的电对称性中的电气精确度。为此目的准备了调节器工具(未示)。
所述的调节器工具包含移动机构和固定靶板4的固定基座,所述移动机构可二维移动,并且可移动固定位置检测光学元件1的固定工具(未示),。固定工具和移动机构的二维移动是相对地给出的。固定工具和移动机构公知为光学装置。事先适当地调节固定工具和移动机构之间的位置关系。结果使靶板4的光接收表面平行于移动机构的二维移动表面。还有,位置检测光学元件11的光轴垂直于所述光接收表面。附着于该移动机构上的PSD器件13布置并固定在靶击位置检测器2的支承结构上,如图3所示。靶板4与所述固定工具一起附着在靶击位置检测器2上。前述的定位孔17在这种固定工具内开口。
激光照射在靶板4记10分的区域中点上。移动机构随后把位置检测光学元件11沿二维方向移动。沿运动的每个点上PSD器件13产生的电流值Ix2和Ix1表达的公式(1)左侧的方向执行所述移动。把(Ix2-Ix1)和(Iy2-Iy1)都变为零的位置定为PSD器件的电气中点。记录这时移动机构的二维标尺,然后把相应于此标尺定位的PSD器件13的电气中点确定为靶击位置检测器2的机械原点。
由固定PSD器件13的移动机构沿x和y坐标方向移动PSD器件13,使得电气中点对应于机械原点。然后测量(Ix2-Ix1)和(Iy2-Iy1)。接着,基于同心圆之间的间隔沿x轴的正方向移动激光束弹着位置。接着,沿x轴的负方向移动PSD器件13直到(Ix2-Ix1)变成零。移动机构的标尺指示出沿x轴方向的运动,并且相对原点读取位置x’。接着基于各同心圆之间的长度沿y轴的正方向移动激光弹着点或者激光点。接着沿y轴的负方向移动PSD器件13直到(Iy2-Iy1)变为零。移动机构的标尺指示出沿y轴负方向的运动,并且相对原点读取位置y’。沿x和y轴方向在靶板4的表面上移动激光束点,以分别找出(Ix2-Ix1)和(Iy2-Iy1)成为零的点。如此确定(x’,y’)。
从如上所述的实际测量,得到下面的函数关系:
x’=jx
y’=ky
如果包括透镜的光学系统的映射关系是理想的,j和k相等并且是常数。由于前述的不对称性,这种组合(x’,y’)不可能完全与在该位置从公式(1)所得到的坐标(x,y)相一致。(x’,y’)与(x,y)之间的临时关系由每个区域的近似线性的关系表达。这些关系中,j和k首先按第一到第四象限改变,然后还按到原点的距离改变。优选地把靶板4上的得分区域分成多个区域。如果把每个区域的可变数表达为s,得出
x’=jsx
y’=jsy
这组(js,ks)在传送/接收信号控制电路54或系统控制CPU55中以表的形式设定。
上述失真校正的执行可以基于激光照射点的绝对位置和靶板4与PSD器件13之间的相对移动的固定(fixture)。然而,校正可以基于靶板4和PSD双方的固定,并且移动激光照射点进行。如果只通过移动激光束弹着点进行失真校正,激光束照射在靶板4上。用眼睛观察激光束弹着位置,以人工读取坐标(x,y),并且记录PSD器件13相应于观察的位置的输出坐标(x’,y’)。(x,y)和(x’,y’)的可变变换与已经说明的相同。为每个划分的区域进行可变的变换,可以表达在每个划分的区域的表中。在此情况下,无需计算。坐标(x,y)不限于正交坐标,可以用极坐标代替正交坐标。在远离PSD器件13的电气中心点的区域,每个划分的区域的宽度应当设置得宽,而在接近PSD器件13的电气中心点的区域,每个划分的区域的宽度应当设置得窄些。
所述调节方法在射击运动埸的正式裁判员指导下由工程师进行。由工程师进行的所述调节优选地应当容易。一种方便的调节方法如下进行。
在靶击位置检测器2的前面设置激光束发生器。在其中以5毫米间隔开有小孔的坐标板被定位并固定在靶击位置检测器2前表面中的靶板4定位,并且附着于该靶击位置检测器2前表面中的靶板4上。从线束发生器发射出的激光束照射在处于坐标板中点的孔上。从靶击位置检测器2的PSD器件13输出的电坐标值(x’,y’)是(0,0)或者其它接近的坐标值。靶板4最后与坐标板一起移动,以调节靶板4的位置,使得电坐标(x’,y’)的值成为(0,0)。对PSD器件13的位置调节可以无须调节靶板4的位置。通过这种调节,使PSD器件13的电原点(0’,0’)与靶板4的机械原点(0,0)相对应。
接着这种机械调节之后进行数学调节。把激光束照射到与对应于坐标板原点的孔邻接的孔上。此时该孔的坐标(x,y)为(0,5)、(5,0)或者(5,5),单位是毫米。在此情况下PSD器件13的输出不总是对应于(5,5)。一般地,坐标板中用激光束照射的该孔的机械坐标值(x,y),和与该坐标值相应的PSD器件13的电坐标(x’,y’)彼此不相等。在机械坐标值(x,y)和电坐标值(x’,y’)之间进行上述的坐标变换。这种坐标变换是移位坐标变换或者旋转坐标变换。
这种基于坐标变换的数学调节是相对图中所示的四个象限进行的。采用包括原点并且通过机械调节确定的象限α、β、γ和ζ。每个象限α、β、γ和ζ是方形的区域并且包括原点O。对于象限α,激光束弹着点沿x轴方向和y轴方向以5毫米的间隔移动,并且基于PSD器件13的输出和相应于激光束弹着点的坐标(x,y)测量坐标(x’和y’)。执行上述的数学调节。还有,对于其它三个象限也进行这种调节。
图14示出这种射击运动的整个系统。包括对应于一个射手的激光枪7的靶板4的靶击位置检测器2和包括对应于另一个射手的靶板4的靶击位置检测器2经前述的LAN65被一起连接到个人计算机66。两个靶板4和一个个人计算机66之间的连接由开关单元96选择性地切换。个人计算机66同时地或者有间隔地显示射手的入场号、子弹号、相应于各子弹的得分、总分、以及激光束子弹击中靶板4上的弹着位置。最后得分计数表从连接至个人计算机66的打印机97输出。靶板4可以用25米处的靶板4’代替。
如图9C、9D和9E所示,响应单次击发操作而发射含在单个子弹中的多个基本子弹。不仅取各个这些基本子弹的得分的平均得分,也可以从每个基本子弹得到一个得分。这种得分计数方法可以在手抠动扳机后手指微细波动的基础上,产生各得分之间的差别。而且可以通过第n个子弹的第j个基本子弹所获得的独立的得分,以数学方式表达射手的所述波动特性。这可以提供一种仅使用实弹射击的常规射击运动中不可能得到的新的运动风格。而且把击发动作的特性,以在靶板4上的多个激光束子弹的弹着位置的弹痕标记的形式用数学方法进行评价,并且对弹痕标记的摆动评分。另外,了解摆动可以帮助纠正实弹射击中的击发动作。
可以从靶端发射发送信号8,并且可以在激光束子弹34上附加与该发送信号8相应的信号。除了这些具有相应信号的激光束子弹之外的激光束子弹,例如从相邻的射击位发射的或者在射击运动埸上无意识地发射的激光束子弹可以被作废。对这些子弹不进行得分计算,也不进行弹痕标记显示之类的弹着位置显示。从激光枪7发射的激光束子弹34具有脉冲宽度,以及对应于作为准许信号的发送信号8的时间之类的数据。如果从另外的射击位发射出的激光束子弹向不与该射击位对应的靶板4发射,从这样的另一个的射击位发射的激光束子弹失效。
以上所作说明中,响应于圆锥束8反复地输出子弹定时信号,并且在附加子弹识别信号时,把子弹定时信号用作激光束子弹或者基本子弹。然而,子弹定时信号可以只响应于击发操作输出,也可以带有或者不带有子弹识别信号输出。
通过把子弹定时信号和单独信号复用,可以在激光枪与靶之间建立较严格的一对一关系的技术。在裁判员的倡议下,适当限制激光束的发射,因此,可以更加稳定的保证激光枪的安全性。位置检测信号和特性信号的串行化可以实现对得分计算处理的精度和速度的改进。由枪端进行的信号发生可以把射击运动的内容多样化。
根据本发明的射击系统中的PSD器件调节方法,射击系统的PSD器件调节方法可以提高激光束照射处位置检测的精确性。
Claims (33)
1.一种射击系统,包括:
激光枪,以及
靶设备,
其特征在于,所述靶设备包括:
与所述激光枪无线连接的靶端通信单元,用于向激光枪输出准射信号;
靶;
与靶光学连接的光接收单元,用于接收激光束子弹;和
电连接到所述光接收单元的检测单元,用于检测激光束子弹的弹着位置;
所述激光枪包括:
扳机;
枪端通信单元,其构成用于接收从所述靶端通信单元发出的准射信号;
击发信号发生电路,该击发信号发生电路响应所述扳机的操作,基于所述准射信号产生击发信号,以及
枪体部,其构成用以响应所述击发信号输出所述激光束子弹。
2.如权利要求1所述的射击系统,其特征在于,所述准射信号具有相对所述激光枪的方向性。
3.如权利要求2所述的射击系统,其特征在于,所述的靶端通信单元包括:
构成用以输出圆锥形光束的光发射装置,及
构成用以赋予所述发射信号方向性的裂隙。
4.如权利要求1至3的任一项所述的射击系统,其特征在于,所述激光束子弹包括:激光束子弹定时信号,用于检测激光束子弹的弹着位置;和激光束子弹识别信号,用于识别所述激光束子弹。
5.如权利要求1至3的任一项所述的射击系统,其特征在于,所述准射信号包括输出所述激光束子弹的条件。
6.如权利要求5所述的射击系统,其特征在于,所述条件是所述准射信号的脉冲宽度。
7.如权利要求1至3的任一项所述的射击系统,其特征在于,所述激光束子弹包括多个基本子弹,
所述多个基本子弹的每个包括:子弹定时信号,用于检测所述激光束子弹的所述弹着位置;和激光束子弹识别信号,用于识别所述激光束子弹,以及
每个所述激光束子弹识别信号都在相应的子弹定时信号之后。
8.权利要求7所述的射击系统,其特征在于,与所述多个基本子弹中的第一个基本子弹的第一个所述激光束子弹识别信号相对应的第一子弹辨别信号包括:与所述第一基本子弹相关联的第一子弹组内信号,以及指示出所述第一基本子弹属于所述激光束子弹的第一公共信号,
与所述多个基本子弹中的第二个基本子弹的第二个所述激光束子弹识别信号相对应的第二子弹辨别信号包括:与所述第二基本子弹关联的第二子弹组内信号,以及指示出所述第二基本子弹属于所述激光束子弹的第二公共信号,
所述第一公共信号与所述第二公共信号等同。
9.如权利要求8所述的射击系统,其特征在于,所述第一子弹内信号和所述第二子弹内信号的每一个都用相同的第一比特数表达,并且
所述第一公共信号与第二公共信号的每一个都用相同的第二比特数表达。
10.如权利要求9所述的射击系统,其特征在于,所述第一比特数是2,而所述第二比特数是6。
11.如权利要求8所述的射击系统,其特征在于,所述激光束子弹的得分是相对于所述第一和第二公共信号的一个得分,它是基于所述第一激光束子弹辨别信号和所述第二激光束子弹辨别信号的至少一个计算出来的。
12.如权利要求1至3之任一项所述的射击系统,其特征在于,所述激光束子弹包括多个基本子弹,以及
所述多个基本子弹的每个包括:弹着位置信号,用于检测所述相应的基本子弹的弹着位置;与所述相应基本子弹相关联的子弹组内信号;以及公共信号,指示出所述相应的基本子弹属于所述激光束子弹。
13.如权利要求12所述的射击系统,其特征在于,基于所述多个子弹内辨别信号计算出的得分作为相对于所述公共信号的一个得分。
14.如权利要求12所述的射击系统,其特征在于,得分是基于所述多个子弹内辨别信号的平均得分而计算出的。
15.如权利要求12所述的射击系统,其特征在于,在所述多个弹着位置信号的弹着位置上进行弹痕标记。
16.如权利要求12所述的射击系统,其特征在于,根据所述多个弹着位置信号的弹着位置之间的相对位置关系得出得分。
17.如权利要求1至3之任一项所述的射击系统,其特征在于,所述靶设备还包括灯,它提示射手所述准射信号的发射。
18.如权利要求1至3之任一项所述的射击系统,其特征在于,所述激光枪还包括选择开关,用以进行模式之间的选择,而所述模式包括发射所述激光束子弹的实射模式,和发出不同于所述激光子弹的光学信号的试射模式。
19.如权利要求18所述的射击系统,其特征在于,所述激光束子弹的所述不同的光学信号是通过修改所述公共信号而获得的信号。
20.如权利要求18所述的射击系统,其特征在于,所述激光束子弹的所述不同的光学信号是通过修改所述多个子弹内信号中相应的一个而得到的信号。
21.一种信号处理方法,包含步骤:
(a)从靶设备向激光枪无线发送准射信号;
(b)由所述激光枪接收所述准射信号;
(c)基于所述准射信号,通过所述激光枪的扳机的操作产生击发信号;
(d)响应所述击发信号,从所述激光枪发出激光束子弹;及
(e)由靶设备接收所述激光束子弹,使得检测激光束子弹的弹着位置。
22.如权利要求21所述的信号处理方法,其特征在于,所述发射步骤(d)包含向所述激光束子弹增加子弹定时信号的步骤。
23.如权利要求22所述的信号处理方法,其特征在于,进一步包括步骤:在靶设备中基于子弹定时信号检测所述激光束子弹的弹着位置。
24.如权利要求23所述的信号处理方法,其特征在于,所述发射步骤(d)还包括:向所述激光束子弹增加激光束子弹识别信号的步骤,所述识别信号用于从与所述激光束子弹不同的其它的激光束子弹中识别出所述激光束子弹。
25.如权利要求21所述的信号处理方法,其特征在于,所述激光束子弹包括多个基本子弹,并且,
所述多个基本子弹的每个包括:子弹定时信号,用于检测所述激光束子弹的所述弹着位置;以及激光束子弹识别信号,用于识别所述激光束子弹。
26.如权利要求25所述的信号处理方法,其特征在于,与所述激光束子弹识别信号相对应的多个激光束子弹辨别信号的每个包括:基本子弹编号信号,指示出所述多个基本子弹的相应一个;以及公共信号,指示出所述相应的基本子弹属于所述激光束子弹。
27.如权利要求26所述的信号处理方法,其特征在于,还包括步骤:把所述激光束子弹的所述多个基本子弹的得分求平均值。
28.如权利要求21至27之任一项所述的信号处理方法,其特征在于,所述发送步骤(a)包括:向激光枪有方向性地发送准射信号的步骤。
29.如权利要求21至27之任一项所述的信号处理方法,其特征在于,还包括:调节所述靶设备位置的步骤(g),所述靶设备包括:
具有照射点的机械坐标(x,y)的靶;和
在所述照射点接收所述激光束子弹并且输出电坐标(x’,y’)的二维光接收单元。
30.如权利要求29所述的信号处理方法,其特征在于,所述的调节步骤(g)包含:基于机械坐标(x,y)调节电坐标(x’,y’)的步骤(h)。
31.如权利要求30所述的信号处理方法,其特征在于,所述调节步骤(h)包括:步骤(i):调节所述靶与所述二维光接收单元之间的相对位置,使得所述的电坐标(x’,y’)与所述靶中点的机械坐标(0,0)相一致。
32.如权利要求30所述的信号处理方法,其特征在于,所述调节步骤(h)包含步骤:
(j)改变所述照射点的位置;和
(k)用数学方法调节所述电坐标(x’,y’),使所述电坐标(x’,y’)与所述照射点改变后的位置的机械坐标(x,y)相一致。
33.如权利要求32所述的信号处理方法,其特征在于,所述改变步骤(j)和所述数学调节步骤(k)是在所述机械坐标(x,y)的坐标系统上的多个区域内独立地执行的。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP232897/2001 | 2001-07-31 | ||
| JP2001232897A JP3653021B2 (ja) | 2001-07-31 | 2001-07-31 | 光銃の射撃システム、その信号処理方法、及び、標的装置の位置調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1400560A CN1400560A (zh) | 2003-03-05 |
| CN1288587C true CN1288587C (zh) | 2006-12-06 |
Family
ID=19064744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB021271003A Expired - Fee Related CN1288587C (zh) | 2001-07-31 | 2002-07-31 | 激光枪及其射击系统 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US20030027612A1 (zh) |
| EP (1) | EP1281925B1 (zh) |
| JP (1) | JP3653021B2 (zh) |
| KR (1) | KR100523159B1 (zh) |
| CN (1) | CN1288587C (zh) |
| DE (1) | DE60211074T2 (zh) |
| NO (1) | NO323318B1 (zh) |
| SG (1) | SG108864A1 (zh) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070287132A1 (en) * | 2004-03-09 | 2007-12-13 | Lamons Jason W | System and method of simulating firing of immobilization weapons |
| TWM268089U (en) * | 2004-09-15 | 2005-06-21 | Zeroplus Technology Co Ltd | Light gun device |
| JP2008082615A (ja) * | 2006-09-27 | 2008-04-10 | Nec Personal Products Co Ltd | シューティングシステム、銃ユニット、及び、標的ユニット |
| GB2446636A (en) * | 2007-02-13 | 2008-08-20 | David Andrew Morris | Infra-red tag identification / communication system |
| US8718977B2 (en) * | 2009-05-29 | 2014-05-06 | Dbinnovations, Llc | Portable apparatus and method for testing and certification of laser-based speed measuring devices |
| US8403672B2 (en) | 2009-10-21 | 2013-03-26 | Tim Odorisio | Training target for an electronically controlled weapon |
| CN102082915A (zh) * | 2009-11-26 | 2011-06-01 | 新奥特(北京)视频技术有限公司 | 一种射击比赛的电子靶电视转播展示方法和装置 |
| CN103185481B (zh) * | 2012-11-20 | 2015-06-17 | 上海交通大学 | 一种基于脑波信号和平衡传感器分析的射击训练稳定性评估装置 |
| CN104225909B (zh) * | 2014-09-11 | 2018-04-06 | 广州名动贸易有限公司 | 一种兼具射击功能的电子飞镖机以及射击时的处理方法 |
| US10451376B2 (en) | 2014-12-16 | 2019-10-22 | Kurt S. SCHULZ | Firearm simulators |
| US9968842B2 (en) * | 2015-05-21 | 2018-05-15 | Laser Tag Pro, Inc. | Laser tag bow |
| US10895435B2 (en) | 2017-02-27 | 2021-01-19 | Kurt S. SCHULZ | Firearm simulator targets and firearm simulation systems |
| DE102017006254A1 (de) | 2017-06-30 | 2019-01-03 | Simon Fröhlich | Vorrichtung zur Auswertung von Laserschüssen auf Zielscheiben |
| CN112316409A (zh) * | 2020-10-29 | 2021-02-05 | 江苏环球之星影视设备科技有限公司 | 一种红外激光识别银幕不同射击点的方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5440000A (en) * | 1977-07-08 | 1979-03-28 | Atari Inc | Shooting game device |
| US4192507A (en) * | 1977-07-08 | 1980-03-11 | Atari, Inc. | Light actuated shooting arcade game |
| US4844476A (en) * | 1987-10-23 | 1989-07-04 | Becker James F | Video target response apparatus and method employing a standard video tape player and television receiver |
| US4898391A (en) * | 1988-11-14 | 1990-02-06 | Lazer-Tron Company | Target shooting game |
| JP2713603B2 (ja) * | 1989-04-21 | 1998-02-16 | 株式会社ナムコ | バトル型ゲーム装置 |
| JP2585108B2 (ja) * | 1989-10-24 | 1997-02-26 | 泉陽興業株式会社 | 遊戯施設 |
| US5605461A (en) * | 1994-10-27 | 1997-02-25 | Seeton; Gary E. | Acoustic triggered laser device for simulating firearms |
| KR100199919B1 (ko) * | 1996-04-10 | 1999-06-15 | 주관엽 | 광선을 이용한 사격훈련방법 및 장치 |
| US6174169B1 (en) * | 1997-11-27 | 2001-01-16 | Oerlikon Contraves Ag | Laser identification system |
| JP3250145B2 (ja) * | 1997-06-16 | 2002-01-28 | バブコック日立株式会社 | 射撃訓練装置 |
| WO1999010700A1 (en) * | 1997-08-25 | 1999-03-04 | Beamhit, L.L.C. | Network-linked laser target firearm training system |
| JP3868633B2 (ja) * | 1998-08-24 | 2007-01-17 | Smk株式会社 | 光位置検出方式 |
| JP2000199698A (ja) * | 1998-12-28 | 2000-07-18 | Namco Ltd | 光線照射位置検出装置 |
| KR100409211B1 (ko) * | 2000-04-17 | 2003-12-11 | 송진주 | 유탄 발사기 레이저 교전훈련장비 |
| US6575753B2 (en) * | 2000-05-19 | 2003-06-10 | Beamhit, Llc | Firearm laser training system and method employing an actuable target assembly |
| AU2001268330A1 (en) * | 2000-06-09 | 2001-12-17 | Beamhit, L.L.C. | Firearm laser training system and method facilitating firearm training with various targets and visual feedback of simulated projectile impact locations |
| US6473980B2 (en) * | 2000-11-30 | 2002-11-05 | Cubic Defense Systems, Inc. | Infrared laser transmitter alignment verifier and targeting system |
-
2001
- 2001-07-31 JP JP2001232897A patent/JP3653021B2/ja not_active Expired - Lifetime
-
2002
- 2002-07-25 US US10/205,346 patent/US20030027612A1/en not_active Abandoned
- 2002-07-29 SG SG200204564A patent/SG108864A1/en unknown
- 2002-07-30 NO NO20023628A patent/NO323318B1/no not_active IP Right Cessation
- 2002-07-31 CN CNB021271003A patent/CN1288587C/zh not_active Expired - Fee Related
- 2002-07-31 EP EP02017247A patent/EP1281925B1/en not_active Expired - Lifetime
- 2002-07-31 KR KR10-2002-0045225A patent/KR100523159B1/ko not_active IP Right Cessation
- 2002-07-31 DE DE60211074T patent/DE60211074T2/de not_active Expired - Lifetime
-
2004
- 2004-11-02 US US10/979,421 patent/US20050118556A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| NO20023628L (no) | 2003-02-03 |
| EP1281925A2 (en) | 2003-02-05 |
| DE60211074D1 (de) | 2006-06-08 |
| KR20030013267A (ko) | 2003-02-14 |
| JP2003038865A (ja) | 2003-02-12 |
| EP1281925B1 (en) | 2006-05-03 |
| US20050118556A1 (en) | 2005-06-02 |
| EP1281925A3 (en) | 2003-11-19 |
| NO20023628D0 (no) | 2002-07-30 |
| CN1400560A (zh) | 2003-03-05 |
| JP3653021B2 (ja) | 2005-05-25 |
| DE60211074T2 (de) | 2006-11-23 |
| KR100523159B1 (ko) | 2005-10-24 |
| NO323318B1 (no) | 2007-03-12 |
| US20030027612A1 (en) | 2003-02-06 |
| SG108864A1 (en) | 2005-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1290046C (zh) | 激光枪及其射击系统 | |
| CN1288587C (zh) | 激光枪及其射击系统 | |
| US6473980B2 (en) | Infrared laser transmitter alignment verifier and targeting system | |
| JP3616608B2 (ja) | 標的装置 | |
| US20240027167A1 (en) | Aiming apparatus for a firearm | |
| CN108871067A (zh) | 枪械激光校准器、标定、校枪及确定枪膛轴线靶点的方法 | |
| CN102102966B (zh) | 一种瞄准器 | |
| US10060598B2 (en) | Two way omnidirectional lens | |
| JP3803589B2 (ja) | 射撃訓練システムおよび方法 | |
| JP2010117090A (ja) | レーザ送信器の照準調整装置 | |
| CN112915523B (zh) | 一种射击区分方法及系统 | |
| CN208505107U (zh) | 一种枪械激光校准器 | |
| CN110579138A (zh) | 一种高射炮实弹射击报靶方法、系统及装置 | |
| CN114577059A (zh) | 警用实战执法一体化智能训练系统 | |
| CN208012459U (zh) | 一种瞄准器及由该瞄准器构成的射击装置 | |
| CN209214446U (zh) | 一种雷达与火炮反觇校正装置 | |
| CN204115586U (zh) | 一种轻武器射击自动报靶设备 | |
| CN207456300U (zh) | 一种采用两组异形激光接收组件的10米激光电子靶 | |
| CN108332610A (zh) | 一种瞄准器及其使用方法及由该瞄准器构成的射击装置 | |
| JP3902625B2 (ja) | 射撃システムの標的位置調整方法 | |
| CN115096135A (zh) | 一种四点瞄准法的训练装置及其激光定位方法 | |
| UA141575U (uk) | Спосіб індикації влучення при стрільбі несмертельними боєприпасами | |
| CN113739641A (zh) | 轻武器战术训练系统 | |
| CZ78792A3 (cs) | Cvičná optická laserová střelnice s elektronickým vyhodnocením místa zásahů |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20061206 |