CN115351812B - 一种机器人双爪夹持装置 - Google Patents
一种机器人双爪夹持装置 Download PDFInfo
- Publication number
- CN115351812B CN115351812B CN202211293241.0A CN202211293241A CN115351812B CN 115351812 B CN115351812 B CN 115351812B CN 202211293241 A CN202211293241 A CN 202211293241A CN 115351812 B CN115351812 B CN 115351812B
- Authority
- CN
- China
- Prior art keywords
- frames
- frame
- ring frame
- drive
- clamping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0028—Gripping heads and other end effectors with movable, e.g. pivoting gripping jaw surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0033—Gripping heads and other end effectors with gripping surfaces having special shapes
- B25J15/0038—Cylindrical gripping surfaces
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明公开了一种机器人双爪夹持装置,具体涉及机器人夹持技术领域,包括直线导轨,所述直线导轨的底端滑动卡设有对称分布的两个滑座,所述滑座的底端均固定安装有安装架,安装架的底端均固定安装有连接架,两个连接架的底端相对侧均固定安装有夹持机构,本发明,通过设置夹持机构,能够对不同尺寸的管状物体进行滚珠式、辊式转动两爪夹持定位,提升了管状物体夹持的稳定性,且便于夹持机构在管状物体的外侧进行水平移动,配合使用覆膜机构、滚珠丝杆,同步驱动筒状防护膜以驱动环框中心进行稳定转动,对管状物体的外侧进行防护膜进行移动式缠绕包裹,对管状物体进行防护膜包裹式防护,从而防止管状物体夹持运输时以及后续运输时出现损害。
Description
技术领域
本发明涉及机器人夹持技术领域,具体为一种机器人双爪夹持装置。
背景技术
目前随着机器人技术的快速发展,各领域对机器人的需求与日俱增,在诸如工业、服务、医疗等领域需要机器人能够像人一样工作,因此,机器人的使用日益广泛;传统的运输机器人上大多数会设有双爪夹持装置,用于夹住产品,为更好的把机器人的重复性和人类的灵活性结合在一起,可以通过更换机器人夹持装置来完成不同的工作。
然而现有的机器人双爪夹持装置在具体使用时,仍存在一些问题:传统的双爪夹持装置,多数是在长架的底端两侧固定安装两个夹持机构,对物体的两端进行夹持定位,随后,将夹持的物体运输至合适位置,虽可以稳定夹持定位物体,但具有一定的局限性,无法适应夹持定位不同长度和尺寸的物体,使用效果一般,且运输的物体需要单独包装防护,比较麻烦,影响了整个物体的运输效率,为此,我们提出一种机器人双爪夹持装置用于解决上述问题。
发明内容
本发明的目的在于提供一种机器人双爪夹持装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种机器人双爪夹持装置,包括直线导轨,所述直线导轨的底端滑动卡设有对称分布的两个滑座,所述滑座的底端均固定安装有安装架,所述安装架的底端均固定安装有连接架,两个所述连接架的底端相对侧均固定安装有夹持机构,两个所述连接架的底端相背侧均固定安装有覆膜机构,所述直线导轨的底端两侧均固定安装有连接纵杆,两个所述连接纵杆之间固定安装有滚珠丝杆,所述夹持机构配合滚珠丝杆带动覆膜机构使用。
优选地,所述夹持机构包括夹持环框,所述夹持环框固定安装在连接架的底端,所述夹持环框的底部开设有第一进料槽,所述夹持环框的外侧底部一体成型有对称分布的两个第一伸缩筒,所述夹持环框的外侧一体成型有环形阵列分布的多个第二伸缩筒,所述第一伸缩筒中滑动卡设有第一活塞架,两个所述第一活塞架的相对侧延伸至夹持环框的内侧,两个所述第一活塞架的相对侧均固定安装有运输架,所述运输架呈弧形结构,两个所述运输架的相对侧均转动安装有均匀分布的多个运输辊,所述第二伸缩筒中均滑动卡设有第二活塞架,所述第二活塞架远离第二伸缩筒的一端伸入夹持环框的内侧,位于夹持环框上方中间位置的顶部两个所述第二活塞架的相对侧均转动安装有电动辊,所述第二活塞架远离第二伸缩筒的一端端面上均滚动卡设有定位滚珠,所述运输架的顶部均滚动卡设有定位滚珠,所述第一活塞架远离运输架的一侧、第一伸缩筒的内壁之间和所述第二活塞架远离定位滚珠的一侧、第二伸缩筒的内壁之间均固定安装有弹簧。
优选地,所述第一伸缩筒、第二伸缩筒的外侧均固定卡设有进气管,所述夹持环框的外侧设有导气管,所述导气管的内侧一体成型有和进气管对应的连接头。
优选地,所述连接头的端部和对应进气管的端部固定安装。
优选地,所述导气管的外侧底部一体成型有进气支管,所述进气支管远离导气管底部的一侧端部倾斜朝上,两个所述进气支管远离导气管底部的一侧端部固定安装有进气总管。
优选地,所述覆膜机构包括驱动环框,所述驱动环框固定安装在连接架的底端,所述驱动环框的底部开设有第二进料槽,所述驱动环框设为中空结构,所述驱动环框的内腔中滑动卡设有外卡环,所述外卡环的内侧中部固定安装有内卡环,所述内卡环滑动卡接在驱动环框的内侧,所述内卡环的内侧中部一体成型有安装筒,所述安装筒中可拆卸安装有安装柱,所述安装柱的底端固定安装有覆膜架,所述覆膜架上转动安装有筒状防护膜。
优选地,所述外卡环的外侧固定套设有从动齿环,所述驱动环框的内腔中转动安装有均匀分布的多个驱动齿轮,所述驱动齿轮和从动齿环啮合连接,相邻两个所述驱动齿轮之间均啮合连接有传动齿轮,所述传动齿轮转动安装在驱动环框的内腔中。
优选地,所述外卡环、内卡环和从动齿环的底部均开设有第二进料槽。
优选地,位于驱动环框内腔上方中间位置的所述驱动齿轮的轴端固定安装有辅轴,所述辅轴与驱动环框转动连接并延伸出驱动环框外,所述辅轴位于驱动环框外的一端固定套设有第一辅齿轮,所述连接架底端靠近辅轴的一侧固定安装有转动架,所述转动架的底部安装有和滚珠丝杆配合使用的丝杆套筒,所述丝杆套筒螺纹套接在滚珠丝杆的外侧,所述丝杆套筒的外侧固定套设有第二辅齿轮,所述第二辅齿轮和第一辅齿轮啮合连接。
优选地,所述直线导轨的顶端两侧均固定安装有固定架。
与现有技术相比,本发明的有益效果在于:
1.通过设置夹持机构,能够对不同尺寸的管状物体进行滚珠式、辊式转动两爪夹持定位,提升了管状物体夹持的稳定性,且便于夹持机构在管状物体的外侧进行水平移动,配合使用覆膜机构、滚珠丝杆,同步驱动筒状防护膜以驱动环框中心进行稳定转动,对管状物体的外侧进行防护膜进行移动式缠绕包裹,对管状物体进行防护膜包裹式防护,从而防止管状物体夹持运输时以及后续运输时出现损害。
2.通过设置夹持机构,夹持机构中设置两个弧形结构的运输架,并带有多个运输辊,驱动两个第一活塞架在对应第一伸缩筒中相向滑动,使两个运输架缓慢接触管状物体,直至多个运输辊接触管状物体,由于运输架呈弧形结构,两个运输架再次逐步相向滑动,便于将放置在地上的管状物体通过多个运输辊的转动,将放置在地上的管状物体通过第一进料槽进入夹持环框中,便于对放置在地上的管状物体进行夹持定位。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
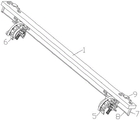
图1为本发明一种机器人双爪夹持装置结构示意图;
图2为本发明一种机器人双爪夹持装置拆分后的结构示意图;
图3为本发明中夹持机构和覆膜机构的连接结构示意图;
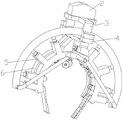
图4为本发明中夹持机构的连接结构示意图;
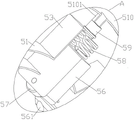
图5为本发明图4中A处的放大图;
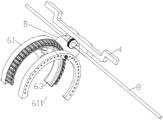
图6为本发明中覆膜机构和滚珠丝杆的连接结构示意图;
图7为本发明图6中B处的放大图;
图8为本发明中覆膜机构部分结构的连接示意图。
图中:1、直线导轨;2、滑座;3、安装架;4、连接架;5、夹持机构;6、覆膜机构;7、连接纵杆;8、滚珠丝杆;9、固定架;51、夹持环框;511、第一进料槽;52、第一伸缩筒;53、第二伸缩筒;54、第一活塞架;55、运输架;551、运输辊;56、第二活塞架;561、定位滚珠;57、电动辊;58、弹簧;59、进气管;510、导气管;5101、连接头;5102、进气支管;5103、进气总管;61、驱动环框;611、第二进料槽;62、外卡环;63、内卡环;64、安装筒;641、安装柱;65、覆膜架;651、筒状防护膜;66、从动齿环;67、驱动齿轮;68、传动齿轮;69、辅轴;691、第一辅齿轮;81、转动架;82、丝杆套筒;83、第二辅齿轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例:如图1-8所示,本发明提供了一种机器人双爪夹持装置,包括直线导轨1,所述直线导轨1的底端滑动卡设有对称分布的两个滑座2,通过在直线导轨1的底端滑动设置对称分布的两个滑座2,滑座2可实现在直线导轨1的底端进行稳定滑动,所述滑座2的底端均固定安装有安装架3,所述安装架3的底端均固定安装有连接架4,两个所述连接架4的底端相对侧均固定安装有夹持机构5,两个所述连接架4的底端相背侧均固定安装有覆膜机构6,所述直线导轨1的底端两侧均固定安装有连接纵杆7,两个所述连接纵杆7之间固定安装有滚珠丝杆8;所述直线导轨1的顶端两侧均固定安装有固定架9,通过在直线导轨1的顶端两侧固定设置固定架9,使用时,将整个机器人双爪夹持装置通过两个固定架9和外部移动机构进行固定安装。
所述夹持机构5包括夹持环框51,所述夹持环框51固定安装在连接架4的底端,所述夹持环框51的底部开设有第一进料槽511,通过在夹持环框51的底部开设第一进料槽511,便于管状物体通过第一进料槽511进入夹持环框51中,所述夹持环框51的外侧底部一体成型有对称分布的两个第一伸缩筒52,所述夹持环框51的外侧一体成型有环形阵列分布的多个第二伸缩筒53,所述第一伸缩筒52中滑动卡设有第一活塞架54,第一活塞架54能够在第一伸缩筒52中进行稳定滑动,两个所述第一活塞架54的相对侧延伸至夹持环框51的内侧,两个所述第一活塞架54的相对侧均固定安装有运输架55,所述运输架55呈弧形结构,两个所述运输架55的相对侧均转动安装有均匀分布的多个运输辊551,使用时,将夹持机构5运输至待夹持管状物体上方,将两个运输架55置于待夹持管状物体的外侧,通过驱动两个第一活塞架54在对应第一伸缩筒52中相向滑动,使两个运输架55缓慢接触管状物体,直至多个运输辊551接触管状物体,由于运输架55呈弧形结构,两个运输架55再次逐步相向滑动,放置在地上的管状物体通过多个运输辊551的转动,通过第一进料槽511进入夹持环框51中,所述第二伸缩筒53中均滑动卡设有第二活塞架56,第二活塞架56能够在第二伸缩筒53中进行稳定滑动,所述第二活塞架56远离第二伸缩筒53的一端伸入夹持环框51的内侧,位于夹持环框51上方中间位置的顶部两个所述第二活塞架56的相对侧均转动安装有电动辊57,其中,电动辊57的转动方向和夹持环框51的环绕方向垂直分布,所述第二活塞架56远离第二伸缩筒53的一端端面上均滚动卡设有定位滚珠561,所述运输架55的顶部均滚动卡设有定位滚珠561,当驱动管状物体通过第一进料槽511进入夹持环框51中后,驱动多个第二活塞架56在对应第二伸缩筒53中进行稳定相向滑动,直至多个定位滚珠561和管状物体的外壁接触,且电动辊57的外侧和管状物体的外壁接触,从而对不同尺寸的管状物体进行滚珠式、辊式转动定位,且后续通过驱动电动辊57转动,带动夹持机构5在管状物体的外侧进行水平移动,便于后续管状物体外侧的覆膜防护作业;
所述第一活塞架54远离运输架55的一侧、第一伸缩筒52的内壁之间和所述第二活塞架56远离定位滚珠561的一侧、第二伸缩筒53的内壁之间均固定安装有弹簧58;所述第一伸缩筒52、第二伸缩筒53的外侧均固定卡设有进气管59,所述夹持环框51的外侧设有导气管510,所述导气管510的内侧一体成型有和进气管59对应的连接头5101;所述连接头5101的端部和对应进气管59的端部固定安装,通过设置连接头5101,连接头5101的端部和对应进气管59的端部固定安装,进行导气管510和第一伸缩筒52、第二伸缩筒53之间的连通。
所述导气管510的外侧底部一体成型有进气支管5102,所述进气支管5102远离导气管510底部的一侧端部倾斜朝上,两个所述进气支管5102远离导气管510底部的一侧端部固定安装有进气总管5103,使用时,将进气总管5103的端部和外部的输气泵机构的输出端连接,开启输气泵机构,外部气流通过进气总管5103,两个进气支管5102从导气管510的底部进入导气管510中,并首先进入第一伸缩筒52中,第一伸缩筒52中气压增加,驱动两个第一活塞架54在对应第一伸缩筒52中相向滑动,并拉伸对应的弹簧58,随后,外部气流进入第二伸缩筒53中,第二伸缩筒53中气压增加,驱动多个第二活塞架56在对应第二伸缩筒53中进行稳定相向滑动,并拉伸对应的弹簧58,相反的,开启输气泵机构吸气,第一伸缩筒52中气压、第二伸缩筒53中气压逐步降低,在弹簧58的复位作用下,拉动第一活塞架54、第二活塞架56复位。
所述覆膜机构6包括驱动环框61,所述驱动环框61固定安装在连接架4的底端,所述驱动环框61的底部开设有第二进料槽611,通过在驱动环框61的底部开设第二进料槽611,便于管状物体通过第二进料槽611进入驱动环框61中,所述驱动环框61设为中空结构,所述驱动环框61的内腔中滑动卡设有外卡环62,外卡环62能够在驱动环框61的内腔中进行稳定转动,所述外卡环62的内侧中部固定安装有内卡环63,所述内卡环63滑动卡接在驱动环框61的内侧,内卡环63能够在驱动环框61的内侧进行稳定转动,所述内卡环63的内侧中部一体成型有安装筒64,所述安装筒64中可拆卸安装有安装柱641,所述安装柱641的底端固定安装有覆膜架65,所述覆膜架65上转动安装有筒状防护膜651,其中,筒状防护膜651倾斜设置,使用时,将筒状防护膜651端部的防护膜缠绕在管状物体的外侧。
所述外卡环62的外侧固定套设有从动齿环66,所述外卡环62、内卡环63和从动齿环66的底部均开设有第二进料槽611,通过在外卡环62、内卡环63和从动齿环66的底部开设第二进料槽611,便于管状物体通过第二进料槽611进入外卡环62、内卡环63和从动齿环66中,其中,通过在外卡环62、内卡环63和从动齿环66以及驱动环框61的底部开设第二进料槽611,使从动齿环66、驱动环框61均呈大于半圆环尺寸的弧形结构,便于后续从动齿环66在驱动环框61中180度转动时,从动齿环66无法从驱动环框61上的第二进料槽611脱离驱动环框61,形成从动齿环66完整的180度转动;
所述驱动环框61的内腔中转动安装有均匀分布的多个驱动齿轮67,所述驱动齿轮67和从动齿环66啮合连接,相邻两个所述驱动齿轮67之间均啮合连接有传动齿轮68,所述传动齿轮68转动安装在驱动环框61的内腔中,通过设置多个驱动齿轮67和从动齿环66啮合连接,防止设置单个驱动齿轮67和从动齿环66啮合连接时,从动齿环66后续180度转动时,从动齿环66会脱离驱动齿轮67,导致单个驱动齿轮67无法驱动从动齿环66继续转动;
通过驱动其中一个驱动齿轮67在驱动环框61的内腔中稳定转动,配合使用传动齿轮68,带动多个驱动齿轮67同步稳定转动,从而驱动从动齿环66转动,进而驱动外卡环62、内卡环63在驱动环框61上以驱动环框61中心进行稳定转动,从而带动安装筒64、覆膜架65和筒状防护膜651以驱动环框61中心进行稳定转动,配合两个夹持机构5在管状物体的外侧进行水平背向移动,驱动两个连接架4、覆膜机构6进行水平背向移动,对管状物体的外侧进行防护膜进行移动式缠绕包裹,对管状物体进行防护膜包裹式防护,从而防止管状物体夹持运输时以及后续运输时出现损害。
位于驱动环框61内腔上方中间位置的所述驱动齿轮67的轴端固定安装有辅轴69,所述辅轴69与驱动环框61转动连接并延伸出驱动环框61外,通过驱动辅轴69转动,带动中间位置驱动齿轮67转动,所述辅轴69位于驱动环框61外的一端固定套设有第一辅齿轮691,所述连接架4底端靠近辅轴69的一侧固定安装有转动架81,所述转动架81的底部安装有和滚珠丝杆8配合使用的丝杆套筒82,所述丝杆套筒82螺纹套接在滚珠丝杆8的外侧,所述丝杆套筒82的外侧固定套设有第二辅齿轮83,所述第二辅齿轮83和第一辅齿轮691啮合连接,当驱动两个连接架4、覆膜机构6进行水平背向移动的同时,驱动两侧丝杆套筒82在转动架81的底部进行水平背向移动,配合滚珠丝杆8的连接,驱动两侧丝杆套筒82同步在转动架81的底部进行转动,从而驱动第二辅齿轮83转动,进而驱动第一辅齿轮691、辅轴69进行同步转动。
工作原理:使用时,初始状态下,两个连接架4相互靠近,将整个机器人双爪夹持装置通过两个固定架9和外部移动机构进行固定安装,将进气总管5103的端部和外部的输气泵机构的输出端连接;
随后,使用外部移动机构将整个机器人双爪夹持装置移至待夹持管状物体上方,使两个连接架4、夹持机构5和覆膜机构6位于管状物体的中部,将两个运输架55置于待夹持管状物体的外侧;
随后,开启输气泵机构,外部气流通过进气总管5103,两个进气支管5102从导气管510的底部进入导气管510中,并首先进入第一伸缩筒52中,第一伸缩筒52中气压增加,驱动两个第一活塞架54在对应第一伸缩筒52中相向滑动,并拉伸对应的弹簧58,使两个运输架55缓慢接触管状物体,直至多个运输辊551接触管状物体,由于运输架55呈弧形结构,两个运输架55再次逐步相向滑动,放置在地上的管状物体通过多个运输辊551的转动,通过第一进料槽511进入夹持环框51中,通过第二进料槽611进入驱动环框61、外卡环62、内卡环63和从动齿环66中;
随后,外部气流进入第二伸缩筒53中,第二伸缩筒53中气压增加,驱动多个第二活塞架56在对应第二伸缩筒53中进行稳定相向滑动,并拉伸对应的弹簧58,直至多个定位滚珠561和管状物体的外壁接触,且电动辊57的外侧和管状物体的外壁接触,从而对不同尺寸的管状物体进行滚珠式、辊式转动两爪夹持定位,提升了管状物体夹持的稳定性;
随后,将筒状防护膜651端部的防护膜缠绕在管状物体的外侧;
随后,驱动电动辊57转动,带动两侧夹持机构5在管状物体的外侧进行水平背向移动,驱动两个连接架4、覆膜机构6进行水平背向移动,当驱动两个连接架4、覆膜机构6进行水平背向移动的同时,驱动两侧丝杆套筒82在转动架81的底部进行水平背向移动,配合滚珠丝杆8的连接,驱动两侧丝杆套筒82同步在转动架81的底部进行转动,从而驱动第二辅齿轮83转动,进而驱动第一辅齿轮691、辅轴69进行同步转动,带动中间位置驱动齿轮67在驱动环框61的内腔中转动,配合使用传动齿轮68,带动多个驱动齿轮67同步稳定转动,从而驱动从动齿环66转动,进而驱动外卡环62、内卡环63在驱动环框61上以驱动环框61中心进行稳定转动,从而带动安装筒64、覆膜架65和筒状防护膜651以驱动环框61中心进行稳定转动,对管状物体的外侧进行防护膜进行移动式缠绕包裹,对管状物体进行防护膜包裹式防护,从而防止管状物体夹持运输时以及后续运输时出现损害;
直至管状物体包裹完毕后,剪断防护膜,并使用外部移动机构将整个机器人双爪夹持装置和管状物体运输至合适位置,随后,开启输气泵机构吸气,第一伸缩筒52中气压、第二伸缩筒53中气压逐步降低,在弹簧58的复位作用下,拉动第一活塞架54、第二活塞架56复位,包裹后的管状物体失去定位,通过第一进料槽511、第二进料槽611排出整个装置。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (9)
1.一种机器人双爪夹持装置,包括直线导轨(1),其特征在于:所述直线导轨(1)的底端滑动卡设有对称分布的两个滑座(2),所述滑座(2)的底端均固定安装有安装架(3),所述安装架(3)的底端均固定安装有连接架(4),两个所述连接架(4)的底端相对侧均固定安装有夹持机构(5),两个所述连接架(4)的底端相背侧均固定安装有覆膜机构(6),所述直线导轨(1)的底端两侧均固定安装有连接纵杆(7),两个所述连接纵杆(7)之间固定安装有滚珠丝杆(8),所述夹持机构(5)配合滚珠丝杆(8)带动覆膜机构(6)使用;
所述夹持机构(5)包括夹持环框(51),所述夹持环框(51)固定安装在连接架(4)的底端,所述夹持环框(51)的底部开设有第一进料槽(511),所述夹持环框(51)的外侧底部一体成型有对称分布的两个第一伸缩筒(52),所述夹持环框(51)的外侧一体成型有环形阵列分布的多个第二伸缩筒(53),所述第一伸缩筒(52)中滑动卡设有第一活塞架(54),两个所述第一活塞架(54)的相对侧延伸至夹持环框(51)的内侧,两个所述第一活塞架(54)的相对侧均固定安装有运输架(55),所述运输架(55)呈弧形结构,两个所述运输架(55)的相对侧均转动安装有均匀分布的多个运输辊(551),所述第二伸缩筒(53)中均滑动卡设有第二活塞架(56),所述第二活塞架(56)远离第二伸缩筒(53)的一端伸入夹持环框(51)的内侧,位于夹持环框(51)上方中间位置的顶部两个所述第二活塞架(56)的相对侧均转动安装有电动辊(57),所述第二活塞架(56)远离第二伸缩筒(53)的一端端面上均滚动卡设有定位滚珠(561),所述运输架(55)的顶部均滚动卡设有定位滚珠(561),所述第一活塞架(54)远离运输架(55)的一侧、第一伸缩筒(52)的内壁之间和所述第二活塞架(56)远离定位滚珠(561)的一侧、第二伸缩筒(53)的内壁之间均固定安装有弹簧(58)。
2.根据权利要求1所述的一种机器人双爪夹持装置,其特征在于:所述第一伸缩筒(52)、第二伸缩筒(53)的外侧均固定卡设有进气管(59),所述夹持环框(51)的外侧设有导气管(510),所述导气管(510)的内侧一体成型有和进气管(59)对应的连接头(5101)。
3.根据权利要求2所述的一种机器人双爪夹持装置,其特征在于:所述连接头(5101)的端部和对应进气管(59)的端部固定安装。
4.根据权利要求2所述的一种机器人双爪夹持装置,其特征在于:所述导气管(510)的外侧底部一体成型有进气支管(5102),所述进气支管(5102)远离导气管(510)底部的一侧端部倾斜朝上,两个所述进气支管(5102)远离导气管(510)底部的一侧端部固定安装有进气总管(5103)。
5.根据权利要求1所述的一种机器人双爪夹持装置,其特征在于:所述覆膜机构(6)包括驱动环框(61),所述驱动环框(61)固定安装在连接架(4)的底端,所述驱动环框(61)的底部开设有第二进料槽(611),所述驱动环框(61)设为中空结构,所述驱动环框(61)的内腔中滑动卡设有外卡环(62),所述外卡环(62)的内侧中部固定安装有内卡环(63),所述内卡环(63)滑动卡接在驱动环框(61)的内侧,所述内卡环(63)的内侧中部一体成型有安装筒(64),所述安装筒(64)中可拆卸安装有安装柱(641),所述安装柱(641)的底端固定安装有覆膜架(65),所述覆膜架(65)上转动安装有筒状防护膜(651)。
6.根据权利要求5所述的一种机器人双爪夹持装置,其特征在于:所述外卡环(62)的外侧固定套设有从动齿环(66),所述驱动环框(61)的内腔中转动安装有均匀分布的多个驱动齿轮(67),所述驱动齿轮(67)和从动齿环(66)啮合连接,相邻两个所述驱动齿轮(67)之间均啮合连接有传动齿轮(68),所述传动齿轮(68)转动安装在驱动环框(61)的内腔中。
7.根据权利要求6所述的一种机器人双爪夹持装置,其特征在于:所述外卡环(62)、内卡环(63)和从动齿环(66)的底部均开设有第二进料槽(611)。
8.根据权利要求6所述的一种机器人双爪夹持装置,其特征在于:位于驱动环框(61)内腔上方中间位置的所述驱动齿轮(67)的轴端固定安装有辅轴(69),所述辅轴(69)与驱动环框(61)转动连接并延伸出驱动环框(61)外,所述辅轴(69)位于驱动环框(61)外的一端固定套设有第一辅齿轮(691),所述连接架(4)底端靠近辅轴(69)的一侧固定安装有转动架(81),所述转动架(81)的底部安装有和滚珠丝杆(8)配合使用的丝杆套筒(82),所述丝杆套筒(82)螺纹套接在滚珠丝杆(8)的外侧,所述丝杆套筒(82)的外侧固定套设有第二辅齿轮(83),所述第二辅齿轮(83)和第一辅齿轮(691)啮合连接。
9.根据权利要求1所述的一种机器人双爪夹持装置,其特征在于:所述直线导轨(1)的顶端两侧均固定安装有固定架(9)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211293241.0A CN115351812B (zh) | 2022-10-21 | 2022-10-21 | 一种机器人双爪夹持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211293241.0A CN115351812B (zh) | 2022-10-21 | 2022-10-21 | 一种机器人双爪夹持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115351812A CN115351812A (zh) | 2022-11-18 |
| CN115351812B true CN115351812B (zh) | 2022-12-30 |
Family
ID=84007743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211293241.0A Active CN115351812B (zh) | 2022-10-21 | 2022-10-21 | 一种机器人双爪夹持装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115351812B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115972223B (zh) * | 2022-12-26 | 2024-01-26 | 江苏齐天铁塔制造有限公司 | 试组装机器人 |
| CN116729713B (zh) * | 2023-08-10 | 2023-11-21 | 南通辉塔智能家居有限公司 | 一种厨房洗碗机自动化包装设备 |
| CN117124305B (zh) * | 2023-10-27 | 2024-02-27 | 江苏恒棠建筑科技有限公司 | 一种工程施工机器人用机械臂结构 |
| CN117885123A (zh) * | 2024-03-14 | 2024-04-16 | 标格达精密仪器(广州)有限公司 | 一种多连杆驱动机械臂 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009275260A (ja) * | 2008-05-14 | 2009-11-26 | Olympus Corp | ハンドリング機構及び成膜装置 |
| CN110239080A (zh) * | 2019-07-26 | 2019-09-17 | 济南翼菲自动化科技有限公司 | 玻璃自动覆膜切膜机 |
| CN214980616U (zh) * | 2021-06-16 | 2021-12-03 | 江苏华兴化学工程建设有限公司 | 一种操作简便的浓缩塔更换模块化施工装置 |
| CN215972296U (zh) * | 2021-10-13 | 2022-03-08 | 昌乐县富杰塑料机械有限公司 | 缠绕包装机用夹持装置 |
| CN114872949A (zh) * | 2022-06-15 | 2022-08-09 | 青岛胜迈自动化科技有限公司 | 缠绕膜包装机 |
-
2022
- 2022-10-21 CN CN202211293241.0A patent/CN115351812B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009275260A (ja) * | 2008-05-14 | 2009-11-26 | Olympus Corp | ハンドリング機構及び成膜装置 |
| CN110239080A (zh) * | 2019-07-26 | 2019-09-17 | 济南翼菲自动化科技有限公司 | 玻璃自动覆膜切膜机 |
| CN214980616U (zh) * | 2021-06-16 | 2021-12-03 | 江苏华兴化学工程建设有限公司 | 一种操作简便的浓缩塔更换模块化施工装置 |
| CN215972296U (zh) * | 2021-10-13 | 2022-03-08 | 昌乐县富杰塑料机械有限公司 | 缠绕包装机用夹持装置 |
| CN114872949A (zh) * | 2022-06-15 | 2022-08-09 | 青岛胜迈自动化科技有限公司 | 缠绕膜包装机 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115351812A (zh) | 2022-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115351812B (zh) | 一种机器人双爪夹持装置 | |
| CN106219239A (zh) | 一种钢管自动码垛机 | |
| CN213424719U (zh) | 一种漆包线的上漆装置 | |
| CN107443085A (zh) | 一种双刀切管机 | |
| CN209550335U (zh) | 一种可调弯折角度的螺旋管弯折装置 | |
| CN112756832A (zh) | 一种停车设备立柱与端板焊接生产线 | |
| CN201746111U (zh) | 一种自动进出料机构 | |
| CN104943914A (zh) | 大型卷料圆周覆膜的自动端封装置 | |
| CN105248054A (zh) | 转臂式青贮圆草捆包膜装置 | |
| CN106364913A (zh) | 一种运输转移装置 | |
| CN109718973A (zh) | 一种喷漆机器人 | |
| CN113414777A (zh) | 一种基于机器视觉的智能机器人搬运装置 | |
| CN108372078A (zh) | 一种鱼竿自动抽漆设备 | |
| CN110978473A (zh) | 一种用于rtp复合管的紧密缠绕设备 | |
| CN210550786U (zh) | 一种缠绕管生产加工用制头机 | |
| KR200354235Y1 (ko) | 비닐원단 자동 권취장치 | |
| CN114985199A (zh) | 一种高压超快恢复二极管生产用涂胶装置 | |
| CN220519691U (zh) | 一种方便下料的无溶剂复合机 | |
| CN114992410B (zh) | 一种施工用管道对接器及用于安装对接器的辅助装置 | |
| CN113070682A (zh) | 一种油管接头成型机 | |
| CN117772471B (zh) | 一种钢管喷漆生产线 | |
| CN220661889U (zh) | 一种用于纸管生产的高效压痕装置 | |
| CN110370313A (zh) | 一种柔性臂以及线珠耦合双向驱动的柔性机械臂 | |
| CN218972222U (zh) | 一种智能视觉检测传送机构 | |
| CN214558415U (zh) | 一种停车设备立柱与端板焊接生产线 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |