CN114619284A - 一种自动校正夹紧送料装置 - Google Patents
一种自动校正夹紧送料装置 Download PDFInfo
- Publication number
- CN114619284A CN114619284A CN202210531951.6A CN202210531951A CN114619284A CN 114619284 A CN114619284 A CN 114619284A CN 202210531951 A CN202210531951 A CN 202210531951A CN 114619284 A CN114619284 A CN 114619284A
- Authority
- CN
- China
- Prior art keywords
- clamping
- feeding
- mounting base
- clamping jaw
- driving piece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q7/00—Arrangements for handling work specially combined with or arranged in, or specially adapted for use in connection with, machine tools, e.g. for conveying, loading, positioning, discharging, sorting
- B23Q7/04—Arrangements for handling work specially combined with or arranged in, or specially adapted for use in connection with, machine tools, e.g. for conveying, loading, positioning, discharging, sorting by means of grippers
- B23Q7/043—Construction of the grippers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Jigs For Machine Tools (AREA)
Abstract
本发明涉及自动化设备技术领域,特别涉及一种自动校正夹紧送料装置。具有安装基座,所述安装基座固定在加工机上,所述安装基座相对的两侧面分别设置有夹紧机构和送料机构。本发明结构紧凑,占用空间小,送料速度快,定位精度准确,具有很好的兼容性,可以根据生产工件规格要求配备不同规格的夹爪,方便调整,性能稳定可靠。通过内侧面为L形的夹爪在夹持时,使得工件对角线方向受力夹紧,这样就会使工件上下两个面及两侧面同时受力,从而起到了自动定心校正及夹紧的作用。
Description
技术领域
本发明涉及自动化设备技术领域,特别涉及一种自动校正夹紧送料装置。
背景技术
随着自动化加工技术的不断提高,对于数控自动化加工设备上下料的自动化程度要求越来越高。首先,在加工件生产制造阶段,一些关键件的加工精度一定要符合要求,这是基础。该装置要求夹持速度快、定位精度准、可以自动校正,所有对于加工件尤其是上下夹爪及连接件等零件的加工要求精度必须达到要求,否则会影响装配精度,进而影响整机精度。其次,在组装阶段,装配过称中各个零件配合精度的调整至关重要,装配精度决定该装置工作的平稳性和可靠性。
相较于夹持圆柱状的的工件,夹持长方体状或正方体状的工件难以通过普通规格的夹爪送料装置被定心夹持,得到高精度的夹持和送料效果。
在长方体或正方体工件的自动送料过程中,最容易出现的风险就是送料不到位、送料偏差、送料歪斜等风险,导致加工零件尺寸偏差或者报废,甚至更严重的会导致加工设备与送料装置撞机,不但损坏设备也会出现工件飞出伤人的严重安全事故。现有加工机床对于上料工件的位置要求,定位精度越来越高,且现有送料机构也难以做到对长方体或正方体工件上料时的自动定心校正作用。因此,急需一种结构简单,性能可靠,能够自动校正夹紧的送料装置。
发明内容
本发明的目的是克服现有技术存在的缺陷,提供一种定位精度高、可自动校正工件、自动夹紧、自动送料,并且夹爪规格可以根据生产产品规格要求更换调整,可适应不同规格零件自动化加工机的自动校正夹紧送料装置。
实现本发明目的的技术方案是:一种自动校正夹紧送料装置,具有安装基座,所述安装基座固定在加工机上,所述安装基座相对的两侧面分别设置有夹紧机构和送料机构。
进一步的,所述夹紧机构包括夹紧驱动件、夹爪、夹爪连接件;所述夹紧驱动件固定在安装基座侧面,所述夹爪共有2个,分别通过夹爪连接件和夹紧驱动件的夹紧驱动端固连。
进一步的,所述夹爪内侧夹持工件的夹持面设置为L形,2个所述夹爪呈中心对称设置。
进一步的,所述夹爪内侧的夹持面上设置有若干锯齿形防滑槽并固定有一层非金属保护胶皮。
进一步的,所述安装基座安装夹紧机构的安装面为斜向下的斜面设计。
进一步的,所述送料机构包括送料驱动件、送料推板、送料缓冲块;所述送料驱动件固定在安装基座侧面,所述送料推板一端固连在送料驱动件的驱动端,另一端设置在2个夹爪连接件之间,且靠近夹爪的侧面上固定有送料缓冲块。
进一步的,所述安装基座靠近送料推板的侧面上设置有1根穿过送料推板的导向杆,所述导向杆和送料驱动件的运动方向同向设置。
进一步的,所述送料缓冲块为非金属优力胶材料。
进一步的,所述夹紧驱动件为夹持气缸或夹持气爪,所述送料驱动件为气缸。
进一步的,所述安装基座底端设置有2个安装件,整体装置外设置有1个防护罩。
采用上述技术方案后,本发明具有以下积极的效果:
(1)本发明结构紧凑,占用空间小,送料速度快,定位精度准确,具有很好的兼容性,可以根据生产工件规格要求配备不同规格的夹爪,方便调整,性能稳定可靠。
(2)本发明专门针对长方体状或正方体的工件,通过内侧面为L形的夹爪在夹持时,使得工件随着2个中心对称设置的夹爪夹紧,沿其自身对角线方向受力夹紧,这样就会使工件上下两个面及两侧面同时受力,向工件中心位置夹紧,从而起到了自动定心校正及夹紧的作用,提高了工件的夹持精度。
附图说明
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中
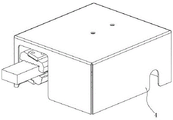
图1为本发明的结构示意图;
图2为本发明安装基座的结构示意图;
图3为本发明夹紧机构的结构示意图;
图4为本发明夹爪工作示意图;
图5为本发明送料机构的结构示意图;
图6为本发明工作示意图;
图7为本发明的整体结构示意图。
具体实施方式
见图1、图2、图6和图7,本发明具有安装基座1,安装基座1固定在加工机上,安装基座1相对的两侧面分别设置有夹紧机构2和送料机构3。安装基座1安装夹紧机构2的安装面为斜向下的斜面设计。该斜面设计可以有效的保证夹紧机构2中夹爪受力方向一致,同时增大了送料机构3的安装接触面,确保安装可靠性,也有效的节省安装空间。安装基座1底端设置有2个安装件12,安装件12为T型安装件,保证装置整体与加工机托板安装的稳定性以及可靠性。整体装置外设置有1个防护罩4。防护罩4为不锈钢外防护罩,可以有效保护装置内部的零部件,防止车间加工生产过程中切屑进入装置系统内部,导致系统零件卡死或损坏。
见图3和图4,夹紧机构2包括夹紧驱动件21、夹爪22、夹爪连接件23;夹紧驱动件21固定在安装基座1侧面,夹爪22共有2个,分别通过上下2个夹爪连接件23和夹紧驱动件21的夹紧驱动端固连。夹爪22内侧夹持工件的夹持面设置为L形,2个夹爪22呈中心对称设置。夹爪22内侧的夹持面上设置有若干锯齿形防滑槽22a并固定有一层非金属保护胶皮。夹紧驱动件21为夹持气缸或夹持气爪。
当夹紧驱动件21工作时,夹爪22上下方向闭合,夹爪22内侧L形的夹持面使得工件沿其对角线的方向受力夹紧,这样就会使工件上下面及两侧面同时受力,从而起到了自动定心校正及夹紧的两项功能。夹爪22内侧面设计有锯齿形防滑槽22a并贴有非金属保护胶皮,可以防止工件滑落同时避免工件表面划伤。
见图5,送料机构3包括送料驱动件31、送料推板32、送料缓冲块33;送料驱动件31固定在安装基座1侧面,送料推板32一端固连在送料驱动件31的驱动端,另一端设置在2个夹爪连接件23之间,且靠近夹爪22的侧面上固定有送料缓冲块33。送料缓冲块33为非金属优力胶材料。送料驱动件31为气缸。
见图1,安装基座1靠近送料推板32的侧面上设置有1根穿过送料推板32的导向杆11,导向杆11和送料驱动件31的运动方向同向设置。导向杆11保证送料推板32的推送方向,防止其偏离。
当夹爪22将工件送到加工机夹持工位后,夹爪22松开微小间隙,送料驱动件31工作,带动送料推板32工作,从而通过送料缓冲块33将工件推送上料,加工机夹持工件,送料机构3自动退回起始工位待料,送料结束,依次循环进行,完成后续工件的送料。送料缓冲块33设计材质为非金属优力胶,可以很好的起到缓冲、防划伤工件的效果,也可以保证推料受力均匀。本发明的工作原理为:
根据生产加工的工件类型配备不同规格的夹爪22,将本装置按加工件要求安装在加工设备的托板(未图示)位置,配合上下道工序的自动化线体调整送料工位,依次循环,完成工件的自动校正夹紧送料。
通常情况下是由关节机器人或桁架机器人将待加工的工件送到该装置的夹爪22上进行初步定位,然后机器人退回,再由该装置完成工件的校正夹紧及精准定位,将工件移送到加工机夹持工位,自动送料装置退回,加工件开始工作,依次连续循环进行,完成其它工件的加工工作。
该装置适用于自动化机械加工行业生产线,可实现多种车削及铣削加工设备的自动化精准送料,结构紧凑方便安装,免维护保养,在降低人工成本,提高生产效率方面发挥着重要作用。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (7)
1.一种自动校正夹紧送料装置,其特征在于:具有安装基座(1),所述安装基座(1)固定在加工机上,所述安装基座(1)相对的两侧面分别设置有夹紧机构(2)和送料机构(3);所述夹紧机构(2)包括夹紧驱动件(21)、夹爪(22)、夹爪连接件(23);所述夹紧驱动件(21)固定在安装基座(1)侧面,所述夹爪(22)共有2个,分别通过夹爪连接件(23)和夹紧驱动件(21)的夹紧驱动端固连;所述夹爪(22)内侧夹持工件的夹持面设置为L形,2个所述夹爪(22)呈中心对称设置;所述安装基座(1)安装夹紧机构(2)的安装面为斜向下的斜面设计。
2.根据权利要求1所述的自动校正夹紧送料装置,其特征在于:所述夹爪(22)内侧的夹持面上设置有若干锯齿形防滑槽(22a)并固定有一层非金属保护胶皮。
3.根据权利要求1或2所述的自动校正夹紧送料装置,其特征在于:所述送料机构(3)包括送料驱动件(31)、送料推板(32)、送料缓冲块(33);所述送料驱动件(31)固定在安装基座(1)侧面,所述送料推板(32)一端固连在送料驱动件(31)的驱动端,另一端设置在2个夹爪连接件(23)之间,且靠近夹爪(22)的侧面上固定有送料缓冲块(33)。
4.根据权利要求3所述的自动校正夹紧送料装置,其特征在于:所述安装基座(1)靠近送料推板(32)的侧面上设置有1根穿过送料推板(32)的导向杆(11),所述导向杆(11)和送料驱动件(31)的运动方向同向设置。
5.根据权利要求3所述的自动校正夹紧送料装置,其特征在于:所述送料缓冲块(33)为非金属优力胶材料。
6.根据权利要求3所述的自动校正夹紧送料装置,其特征在于:所述夹紧驱动件(21)为夹持气缸或夹持气爪,所述送料驱动件(31)为气缸。
7.根据权利要求1所述的自动校正夹紧送料装置,其特征在于:所述安装基座(1)底端设置有2个安装件(12),整体装置外设置有1个防护罩(4)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210531951.6A CN114619284A (zh) | 2022-05-17 | 2022-05-17 | 一种自动校正夹紧送料装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210531951.6A CN114619284A (zh) | 2022-05-17 | 2022-05-17 | 一种自动校正夹紧送料装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114619284A true CN114619284A (zh) | 2022-06-14 |
Family
ID=81907360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210531951.6A Pending CN114619284A (zh) | 2022-05-17 | 2022-05-17 | 一种自动校正夹紧送料装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114619284A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115194538A (zh) * | 2022-07-12 | 2022-10-18 | 电子科技大学成都学院 | 一种生产线加工用工件矫正装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103692300A (zh) * | 2013-12-31 | 2014-04-02 | 潘旭华 | 一种外圆磨床自动送料方法 |
| CN104400535A (zh) * | 2014-10-21 | 2015-03-11 | 马勒三环气门驱动(湖北)有限公司 | 气门上料盒装置及其操作方法 |
| CN104816097A (zh) * | 2015-05-11 | 2015-08-05 | 武汉思瑞法机器人制造有限公司 | 用于管道激光切割机的工装夹具及管道激光切割机 |
| CN107175528A (zh) * | 2017-05-19 | 2017-09-19 | 四川眉山强力机械有限公司 | 一种基于搬运机器人的铸件锥套的上料机构 |
| CN107639420A (zh) * | 2017-10-25 | 2018-01-30 | 嘉兴创诺精密五金有限公司 | 一种配件的一体化加工装置及加工方法 |
| CN110125790A (zh) * | 2019-05-29 | 2019-08-16 | 安庆安帝技益精机有限公司 | 一种活塞环珩磨送料伺服夹爪 |
| CN211102944U (zh) * | 2019-12-15 | 2020-07-28 | 十堰昌昊工贸有限公司 | 一种车床的自动化上下料装置 |
| CN212350813U (zh) * | 2020-06-09 | 2021-01-15 | 深圳市华龙新力激光科技有限公司 | 管材自动送料装置 |
| WO2021197419A1 (zh) * | 2020-04-01 | 2021-10-07 | 吉林省中赢高科技有限公司 | 一种新型摩擦焊设备及生产线 |
-
2022
- 2022-05-17 CN CN202210531951.6A patent/CN114619284A/zh active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103692300A (zh) * | 2013-12-31 | 2014-04-02 | 潘旭华 | 一种外圆磨床自动送料方法 |
| CN104400535A (zh) * | 2014-10-21 | 2015-03-11 | 马勒三环气门驱动(湖北)有限公司 | 气门上料盒装置及其操作方法 |
| CN104816097A (zh) * | 2015-05-11 | 2015-08-05 | 武汉思瑞法机器人制造有限公司 | 用于管道激光切割机的工装夹具及管道激光切割机 |
| CN107175528A (zh) * | 2017-05-19 | 2017-09-19 | 四川眉山强力机械有限公司 | 一种基于搬运机器人的铸件锥套的上料机构 |
| CN107639420A (zh) * | 2017-10-25 | 2018-01-30 | 嘉兴创诺精密五金有限公司 | 一种配件的一体化加工装置及加工方法 |
| CN110125790A (zh) * | 2019-05-29 | 2019-08-16 | 安庆安帝技益精机有限公司 | 一种活塞环珩磨送料伺服夹爪 |
| CN211102944U (zh) * | 2019-12-15 | 2020-07-28 | 十堰昌昊工贸有限公司 | 一种车床的自动化上下料装置 |
| WO2021197419A1 (zh) * | 2020-04-01 | 2021-10-07 | 吉林省中赢高科技有限公司 | 一种新型摩擦焊设备及生产线 |
| CN212350813U (zh) * | 2020-06-09 | 2021-01-15 | 深圳市华龙新力激光科技有限公司 | 管材自动送料装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115194538A (zh) * | 2022-07-12 | 2022-10-18 | 电子科技大学成都学院 | 一种生产线加工用工件矫正装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4671599B2 (ja) | ツーリング装置を用いる製造セル | |
| US11806794B2 (en) | Processing device and processing method | |
| JP4575662B2 (ja) | 金属加工用モジュール式ツーリング装置 | |
| CN114619284A (zh) | 一种自动校正夹紧送料装置 | |
| CN110421314A (zh) | 环形槽薄壁零件加工工艺 | |
| CN206662766U (zh) | 航空叶片夹具 | |
| CN211072730U (zh) | 一种机床用安全液压锁紧工装 | |
| CN106736765A (zh) | 一种角钢夹具 | |
| CN217224546U (zh) | 一种机床零点系统 | |
| CN106425573B (zh) | 增强型多轴精铣装置 | |
| CN210476240U (zh) | 一种多工位加工的工装夹具 | |
| CN212858732U (zh) | 一种外卡式自动上下料夹具 | |
| CN215393838U (zh) | 一种兼容式槽系列机器人小臂随行夹具 | |
| CN201505822U (zh) | 一种正方形电极夹具夹紧机构的改良结构 | |
| CN216781139U (zh) | 一种龙门铣床用于校正大型板料装夹定位工具 | |
| CN116021301A (zh) | 一种适用于自动化生产线的车床上下料接口托盘机构 | |
| CN110539322A (zh) | 一种自调平型机械手 | |
| CN111215712A (zh) | 一种自动上下料装置及其控制方法 | |
| US20240123576A1 (en) | Multi-station vise adapter | |
| CN219818153U (zh) | 一种多工件铣尺框槽设备 | |
| CN218855647U (zh) | 一种卡盘用卡爪延长组件 | |
| CN111618629A (zh) | 适用于异形工件的夹持装置及其使用方法 | |
| CN211465697U (zh) | 防晃灯珠安装片检测定位用加工辅助装置 | |
| CN108747895A (zh) | 异形铝合金工件的去夹位工艺 | |
| CN212264584U (zh) | 一种钻孔点铆自动化机器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20220614 |