CN113950552B - 负载操纵机器以及用于控制负载操纵机器的方法 - Google Patents
负载操纵机器以及用于控制负载操纵机器的方法 Download PDFInfo
- Publication number
- CN113950552B CN113950552B CN202080042100.4A CN202080042100A CN113950552B CN 113950552 B CN113950552 B CN 113950552B CN 202080042100 A CN202080042100 A CN 202080042100A CN 113950552 B CN113950552 B CN 113950552B
- Authority
- CN
- China
- Prior art keywords
- machine
- control device
- control
- operator
- operating unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/02—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver
- B60K28/04—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver responsive to presence or absence of the driver, e.g. to weight or lack thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/003—Safety devices, e.g. for limiting or indicating lifting force for fork-lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
- B66F9/0655—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted with a telescopic boom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0759—Details of operating station, e.g. seats, levers, operator platforms, cabin suspension
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- General Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Operation Control Of Excavators (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Vehicle Body Suspensions (AREA)
- Component Parts Of Construction Machinery (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Harvester Elements (AREA)
Abstract
本发明涉及用于操纵负载(24)的机器(1),该机器包括:‑底盘(2),其装备有驾驶员站(15);负载操纵系统(4),其由底盘承载;装置(6),其用于控制负载操纵系统(4),其中,该控制装置(6)能够被操作者手动致动,该控制装置包括配置成被手动抓握的手动部分(61);操作单元(5),其配置成从所述控制装置(6)接收控制信号;构件(7),其用于致动能够被手动致动的控制装置(6),其中,操作单元(5)配置成在致动构件(7)的致动状态下至少根据从控制装置(6)接收的控制信号来控制操纵系统(4),其中,驾驶员站(15)装备有用于检测所述站(15)处操作者存在或不存在的检测系统(16),该检测系统(16)包括不同于控制装置(6)的至少一个存在传感器(17),并且其中操作单元(5)配置成,在致动构件(7)处于从致动构件(7)的致动状态转换为非致动状态之后的非致动状态下时,至少根据用于检测所述站(15)处的操作者的存在的系统(16)所检测的操作者的不存在或存在而阻止或允许使用控制装置(6)至少控制操纵系统(4)。
Description
技术领域
本发明涉及一种负载操纵机器,诸如具有伸缩或非伸缩提升臂的机器、动力铲、斗式装载机等,并且涉及一种用于控制负载操纵机器的方法。
背景技术
更具体地说,本发明涉及一种负载操纵机器,包括:
-带有轮的底盘,其装备有驾驶员站,
-驱动系统,其驱动带有轮的底盘的运动,
-系统,其用于操纵负载并且由底盘承载,
-控制装置,其用于控制负载操纵系统,该控制装置能够被操作者手动致动,该控制装置包括配置成被手动抓握的手动部分,
-操作单元,其配置成从所述控制装置接收控制信号,
-致动构件,其用于能够被手动致动的控制装置,
操作单元,其配置成使得当致动构件处于致动状态时,所述操作单元至少根据从控制装置接收的控制信号而允许操作操纵系统。
出于安全原因,法规要求采取措施来防止控制装置在负载操纵机器上意外操作。例如,由于操作者的衣服挂在控制装置上,使得操作者无意地或没有意识到地操作控制装置,可能导致意外操作。如专利EP-0.981.078和EP-1.523.704中所示,为了解决这个问题,已经开发了包括致动构件的负载操纵机器,该致动构件致动控制装置以避免使用控制装置的意外操作。文献EP-1.953.027也是这种情况。然而,这种致动构件的存在对操作者施加了限制。因此,寻求允许在不损害操作者的安全的情况下减少对操作者施加的限制的解决方案。
发明内容
本发明的目的是提出一种上述类型的负载操纵机器,其设计使得可以在不损害操作者的安全的情况下减少对操作者施加的限制。
为此,本发明的一个主题是一种负载操纵机器,包括:
-底盘,其装备有驾驶员站,
-系统,其用于操纵负载并且由底盘承载,
控制装置,其用于控制负载操纵系统,该控制装置能够被操作者手动致动,该控制装置包括配置成被手动抓握的手动部分,
-操作单元,其配置成从所述控制装置接收控制信号,
-致动构件,其用于致动能够被手动致动的控制装置,操作单元配置成使得在致动构件的致动状态下至少根据从控制装置接收的控制信号而允许操作操纵系统,
其中,驾驶员站装备有检测系统,该检测系统能够检测在所述站处操作者的存在或不存在(即是否存在操作者),该检测系统至少包括与控制装置不同的存在传感器,并且操作单元配置成使得,当致动构件处于致动构件已经从致动状态转换到非致动状态之后的所述非致动状态时,所述操作单元至少根据由用于检测在所述站处操作者的存在的检测系统检测到的操作者不存在或操作者存在的状态来阻止或允许使用控制装置操作操纵系统。这种用于检测操作者的存在或不存在的系统的存在使得例如使致动构件能够保持在非致动状态的时间段延长而不损害操作者的安全成为可能。
根据本发明的一个实施例,操纵机器包括感测指示机器的运动的参数的传感器(参数传感器),并且操作单元配置成至少根据指示机器的运动的参数而允许使用控制装置操作操纵系统。此外,这种布置使得可以限制对操作者施加的关于致动构件的限制,并且在机器的行驶阶段期间提高驾驶舒适性,而不会损害操作者的安全。
根据本发明的一个实施例,指示机器的运动的参数的传感器是指示机器的行进速度的参数的传感器,机器包括用于存储机器的预定行进速度的存储器,并且操作单元配置成使得,当用于致动控制装置的致动构件处于非致动状态时,所述操作单元在由指示机器的行进速度的参数的传感器提供的机器的行进速度大于存储在存储器中的预定值的情况下允许使用控制装置操作操纵系统。
根据本发明的一个实施例,操作单元配置成启动至少一个被称为存在计时器的计时器,该存在计时器限定当致动构件从致动状态转换到非致动状态的时间间隔,并且操作单元配置成在由存在计时器限定的时间间隔已经过去时,阻止使用由控制装置提供到操作单元的控制信号操作操纵系统,并且操作单元配置成至少根据由用于检测操作者在所述站处的存在的检测系统检测到的操作者不存在或操作者存在的状态来重置存在计时器。
根据本发明的一个实施例,操作单元配置成当用于检测操作者在所述站处的存在的检测系统检测到操作者的不存在时阻止存在计时器的重置。
根据本发明的一个实施例,操作单元配置成至少根据从控制装置接收的控制信号来重置存在计时器。
根据本发明的一个实施例,操作单元配置成根据由指示机器的运动的参数的传感器提供的数据来重置存在计时器。
根据本发明的一个实施例,操作单元配置成启动至少一个被称为控制计时器的计时器,该控制计时器限定致动构件从致动状态转换到非致动状态的时间间隔,并且操作单元配置成在由控制计时器限定的时间间隔已经过去时阻止使用控制装置操作操纵系统,并且操作单元配置成至少根据由指示机器的运动的参数的传感器提供的数据并且在适当的情况下至少根据从控制装置接收的控制信号来重置控制计时器。
根据本发明的一个实施例,由控制计时器限定的时间间隔的持续时间大于由存在计时器限定的时间间隔的持续时间。因此,在存在操作者的情况下,可以提供改进的驾驶舒适性而不损害操作者的安全。
根据本发明的一个实施例,控制操纵系统的控制装置是包括至少两个控制元件的控制装置。
根据本发明的一个实施例,机器包括驱动带有轮的底盘的运动的驱动系统,用于控制操纵系统的控制装置是多功能控制装置,并且控制元件中的至少一个配置成控制操纵系统的至少一部分,并且控制元件中的其它控制元件或另一控制元件配置成控制驱动机器的运动的驱动系统的至少一部分。
根据本发明的一个实施例,致动构件由用于控制操纵系统的控制装置承载。
根据本发明的一个实施例,致动构件是用于检测操作者的手在控制装置的手动部分上的存在的传感器。
根据本发明的一个实施例,操纵系统包括安装在所述底盘上能围绕水平旋转轴线旋转的至少一个操纵臂和驱动所述操纵臂围绕所述水平旋转轴线运动的至少一个致动器。
根据本发明的一个实施例,驾驶员站采用操作室的形式,在操作室内有至少一个操作者可坐在其上的座椅,所述操作室通过门关闭,并且用于检测在所述站处操作者的存在的检测系统的存在传感器或存在传感器中的至少一个装备于所述座椅。
根据本发明的一个实施例,用于检测在所述站处操作者的存在的系统包括用于检测门的打开和/或关闭的至少一个传感器。
本发明的另一个主题是一种用于控制负载操纵机器的方法,所述负载操纵机器包括:
-底盘,其装备有驾驶员站,
-系统,其用于操纵负载并且由底盘承载,
控制装置,其用于控制负载操纵系统,该控制装置能够被操作者手动致动,该控制装置包括配置成被手动抓握的手动部分,
-操作单元,其配置成从所述控制设备接收控制信号,
-致动构件,其用于致动能够被手动致动的控制装置,所述方法包括手动致动致动构件以致动控制装置的步骤,从而在致动构件的致动状态下至少根据从控制装置接收的控制信号而允许操作操纵系统,
其中,驾驶员站装备有检测系统,检测系统能够检测所述站处操作者的存在或不存在,该检测系统至少包括与控制装置不同的存在传感器,该方法包括当致动构件处于致动构件已经从致动状态转换到非致动状态之后的非致动状态时,至少根据由用于检测所述站处操作者的存在的检测系统检测到的操作者不存在或操作者存在的状态来允许或阻止使用控制装置操作操纵系统的步骤。
附图说明
在参考附图阅读以下示例性实施例的描述时,将清楚地理解本发明,在附图中:
图1描绘了根据本发明的负载操纵机器的示意图,其中提升臂处于升高位置;
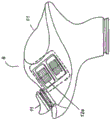
图2描绘了根据本发明的负载操纵机器的透视图,其中提升臂处于降低位置;
图3描绘了从致动构件侧观察的控制装置的局部视图;
图4描绘了从与致动构件侧相反的一侧观察的控制装置的局部视图;
图5是机器的部件的示意图;
图6是可由图1的操纵机器实施的控制方法的示意图;
图7是可由图1的操纵装置实施的控制方法的示意图。
具体实施方式
下面将参照附图更详细地描述本发明的构思,附图示出了本发明的构思的各实施例。在整个说明书中对“一个实施例”的引用意味着结合一个实施例描述的特定功能、结构或特征被包括在本发明的至少一个实施例中。因此,在整个说明书的各个地方出现的表述“在一个实施例中”不一定是指同一个实施例。此外,特定功能、结构或特征可以以任何合适的方式组合在一个或多个实施例中。
如上所述,本发明涉及一种根据图1所示的负载操纵机器1。该机器1包括底盘2。在所描绘的示例中,该底盘2装备有用于支承在地面上的轮子20,从而形成带有轮的底盘2。该底盘2上安装有驾驶员站15。该驾驶员站15采用操作室151的形式,在该操作室内有操作者可以坐的至少一个座位18。操作室151通过门19关闭。如在描绘的示例中,机器1还可以包括通过驱动机器1的轮子20的旋转运动来驱动带有轮的底盘2的运动的驱动系统3。驱动底盘2的该驱动系统3以本身已知的方式包括通过传动装置连接到轮子20的内燃机。驱动底盘2运动的该驱动系统3尤其使用位于操作室151中的未示出的油门踏板来控制。
操纵机器1还包括用于操纵负载并由底盘2承载的系统4。该操纵系统4包括安装在所述底盘2上可绕水平旋转轴线21旋转的至少一个操纵臂13和驱动所述操纵臂13绕水平旋转轴线21运动的至少一个致动器14。因此,操纵臂13是枢转臂,其被安装成能够绕垂直于臂的纵轴线的水平轴线21枢转,使得臂13可以使用致动器14从降低位置移动到升高位置,反之亦然,所述致动器诸如为通过液压回路连接到液压泵的液压油缸,泵和回路未被示出。臂可以是伸缩臂,其长度可以在臂的缩回位置和伸展位置之间调节。为此,臂13可以由两个臂部分形成,其中一个臂部分被称为第一部分,第一部分能够枢转地联接到底盘10,并且其中另一个臂部分被称为第二部分,第二部分嵌套在第一臂部分中,能够在第一臂部分中滑动。作为替代,臂可以不是可伸缩的。
两个臂部分的嵌套滑动相对运动可以使用机器的第二致动器获得,该第二致动器诸如为双动式油缸,其容纳在第一臂部分中并且通过油缸杆固定到第二臂部分,以允许臂部分在油缸杆缩回或伸展的作用下被驱动相对运动。
负载操纵臂13可在其自由端处装备有通过枢转连接而连接到臂的附件23。该附件23可以通过致动器25而围绕枢转连接的枢轴被驱动,该致动器也可以由双动式液压油缸形成或由平行且依次操作的两个单动式油缸形成。
在所描绘的示例中,该附件23包括叉配件,并且致动器25通过该附件绕垂直于臂13的纵轴线的被称为水平轴线的轴线枢转而允许叉配件在拾取位置和卸载位置之间移动。该枢转轴线平行于臂13连接到底盘10所绕的枢转轴线21。卸载位置对应于叉配件的朝向地面枢转的极限位置。叉配件的拾取位置对应于叉配件和相关负载24(当存在这种负载时)的向上枢转位置。
操纵机器1还包括操作单元5,操作单元5配置成控制致动器14和致动器25的操作,并且在适当的情况下,当存在伸缩装置时,控制伸缩装置的伸展,使得可以引起臂13和附件23的运动。
操作单元5是电子和/或计算机化单元,其例如包括与存储器相关联的微控制器或微处理器。因此,当陈述单元或属于所述单元的装置配置成执行给定操作时,这意味着该单元包括使得可以执行所述操作的计算机指令和相应的执行装置和/或相应的电子部件。
换言之,所描述的功能和步骤可以以计算机程序的形式或经由硬件组件(例如可编程门阵列)来实现。特别地,由操作单元5执行的功能和步骤可以由在处理器或控制器中实现的指令集或计算机模块来执行,或者由专用电子部件或FPGA或ASIC部件来执行。也可以将计算机部件和电子部件结合。
因此,操作单元5通过经由液压回路控制相应的致动器14和致动器25来控制操纵系统4,尤其是控制臂13和附件23的运动。
由操作单元5提供的控制信号通常作用于设置在泵和致动器14、25之间的连接部中的构件(诸如分配器或阀等),以便允许以本身已知的方式将流体适当地提供给致动器14、25。
操纵机器1还包括用于控制负载操纵系统4的控制装置6。该控制装置6是手动致动的并且能够向操作单元5提供控制信号。这些控制信号由操作单元5处理。操作单元5根据这些控制信号产生用于控制至少如上所述的负载操纵系统4的控制信号。
在所描绘的示例中,用于控制负载操纵系统4的控制装置6是多功能控制装置6。具体地说,控制装置6一方面可以用于控制操纵系统4,并且另一方面可以用于控制驱动机器1的运动的系统3。在变型中,控制装置6可以是仅允许控制操纵系统4的控制装置。在下文中,将总是考虑控制装置6是多功能控制装置。因此,用于控制操纵系统4的该控制装置6包括至少两个控制元件。在所描绘的示例中,图中示为10的一个控制元件配置成控制操纵系统4的至少一部分,而图中示为11的另一控制元件配置成控制驱动机器1的运动的系统3的至少一部分。还存在图中示为12a和12b的其它控制元件。该控制装置6可以采用各种形式。
在图1、图3和图4所描绘的示例中,用于控制操纵系统4的控制装置6的控制元件10是机器的操作者可以用手操纵的杆或操纵杆,并且其它控制元件11、12a、12b由所述杆承载。这些其它控制元件位于杆的圆头部(pommel)上。该杆的圆头部对应于控制装置6的手动部分61,并且构造成当控制装置根据其目的被抓握在手中时被抓握。
这种控制装置是本领域技术人员公知的,并且这种控制装置的示例例如在专利FR-2.858.861中描述。
控制杆或操纵杆以本身已知的方式将位置信号从所述杆传送到操作单元5。这些位置信号可以被操作单元5解释为用于指示臂13和/或附件23的移动的信号。
根据一个实施例,控制杆可以因此朝向机器的前部向前移动、朝向机器的后部向后移动、或朝向机器的左部或左部向左或向右移动。在所描绘的示例中,该控制杆至少能够在向前/向后方向上朝向机器的前部/后部移动,以安装成能够向前移动而控制臂13的下降,以及向后移动而控制臂13的上升。控制杆的向前/向后移动因此可以控制第一致动器14在臂13和底盘2之间的操作。该控制杆10还可以安装成能够在横向于向前/向后方向的左/右方向上移动,以便向左移动以控制附件23的拾取位置,并且向右移动以控制附件23的卸载位置。控制杆的左/右移动因此控制在附件23和臂13之间的致动器25的操作。这些向前/向后和左/右方向对应于主方向,并且控制杆可以沿无限多个方向被驱动,控制杆在给定方向上的移动对应于控制杆相对于主方向的位置的成比例的组合动作。如图4所示,控制杆可以装备有控制元件12a(诸如旋钮等),用于控制伸缩致动器,以便在伸缩臂13的情况下向外伸出。因此,由控制杆承载的旋钮沿一个方向的旋转允许臂13通过臂13的第二臂部分在臂13的延伸方向上的滑动运动而伸展,并且由控制杆承载的旋钮沿相反方向的旋转允许臂缩回。
可以设置其它按钮、旋钮等(诸如图3中以12b所示的按钮、旋钮等),用于控制附件的某些功能。控制元件中的一个(在图中以11示出)配置成控制驱动机器的运动的系统3的至少一部分。该控制元件11可以由具有三个稳定位置的换向按钮形成,以便使机器以向前行进操作、在空档位置停止、或以反向行进操作。驱动底盘2的运动的系统3的传动装置可以包括变速箱,并且变速箱升档和降档控制可以使用按钮或由杆承载的一些其它控制构件来执行。因此,应当理解,这些控制元件可以非限制性地以旋钮、开关、按钮、转换开关、传感器(特别是霍尔效应传感器)、电位计等形式实现。
当操作者的手定位在控制装置6的手动部分61上时,该控制杆和由该控制杆承载的控制元件可以由操作者仅用一只手致动,这里该手动部分由控制杆的圆头部的至少一部分形成。
操纵机器1还包括用于致动能够被手动致动的控制装置6的致动构件7。该致动构件7由用于控制操纵系统4的控制装置6承载。
致动构件7是存在传感器,其能够在控制装置6根据其目的已经被手抓握的状态下检测操作者的手在所述控制装置6上的存在。特别地,致动构件7是布置在控制装置6的手动部分61上的存在传感器。因此,该手动致动的致动构件7配置成当手存在于控制装置6的手动部分61上时从非致动状态转换到致动状态,并且相反地,当手不存在于控制装置6的手动部分61上时从致动状态转换到非致动状态。应该注意,术语“致动”应该以其最宽泛的意义来理解。使致动构件7致动意味着作用在致动构件7上。因此,在不脱离本发明的范围的情况下,致动构件7的致动可以非限制性地通过简单接触、通过支撑或通过压力、通过手在比预定距离更近的距离处的存在等发生。
例如,致动构件7可以制造成按钮式按钮或电容传感器式传感器的形式。在电容式传感器的情况下,面向致动构件7的手的存在(包括无接触式存在)可能足以使致动构件7致动。
以下将描述致动控制装置6的该致动构件7的作用。
操纵机器1还可以包括指示机器的运动的参数的传感器8。操作单元5配置成接收由该传感器8提供的数据。操作单元配置成至少根据由该传感器8提供的数据而允许使用控制装置操作操纵系统。该传感器8可以采用各种形式。优选地,指示机器1的运动的参数的该传感器8是指示机器1的行进速度的参数的传感器,并且操作单元配置成至少根据指示机器的运动的参数而允许使用控制装置操作操纵系统,操作单元配置成至少根据指示机器的进行速度的参数而允许使用控制装置操作操纵系统。该速度传感器8可以是测量轮子的旋转速度或指示机器的行进速度的任何其它机械构件的速度的传感器。非零速度还可以通过检测与轮子接合的变速器部件的驱动来检测。
最后,机器1在驾驶员站15处包括用于检测驾驶员站处的操作者的存在的系统16。该检测系统16能够检测在所述站处的操作者的不存在或存在,该检测系统16包括至少一个存在传感器17。该存在传感器17与控制装置6的手动部分61不同。操作单元5配置成使得当致动构件7处于非致动状态时(致动构件7的非致动状态由致动构件从致动状态转换到非致动状态而产生),所述单元至少根据由用于检测在所述站15处的操作者的存在的检测系统16所检测到的操作者不存在或操作者存在的状态而阻止或允许使用控制装置6操作操纵系统4。
在所描绘的示例中,检测系统16的存在传感器17是操作者座椅18所配备的传感器,并且该传感器对由操作者施加在座椅的椅垫上的重量的压力敏感。该传感器在操作者坐在座椅上时处于激活状态并且发出信号。检测系统16还可以包括检测操作室151的门19的打开/关闭的传感器22。该传感器在门处于关闭状态时处于激活状态并且发出信号。检测系统16还包括处理模块161,处理模块161允许处理来自所述传感器17和22的信号,以便检测操作者的存在或不存在。该处理模块161可以结合到操作单元5中。如下所述,操作单元5配置成使得,当致动构件7处于致动构件7从致动状态转换到非致动状态之后的非致动状态时,所述单元在检测到操作者不存在时阻止使用控制装置6操作操纵系统4。应当注意,在以下情况下检测系统16检测到操作者的存在:当位于座椅18中的存在传感器17被激活时;或者当在门已经被检测门19的打开/关闭的传感器22检测为处于关闭状态的情况下,位于座椅中的存在传感器17处于非激活状态并且在门处于关闭状态而没有检测到门的打开的情况下已经从激活状态转换到非激活状态时。来自这些传感器的信号被发送到处理模块161。
如下文所解释的,操作单元5配置成允许或阻止通过控制装置6进行机器的操作,特别是进行操纵系统4的操作,以及在适当的情况下,允许或阻止通过控制装置6进行用于驱动带有轮的底盘的运动的系统3的操作。
操作单元5配置成当致动构件7处于致动状态时从致动构件7接收信号。因此,在致动构件7是按钮的情况下,当放置在控制系统6上的操作者的手压下按钮时,致动构件7的致动信号被提供到操作单元5。
在致动构件7由电容传感器形成的情况下,简单地通过将操作者的手定位在面向所述传感器的控制装置6上,信号被提供到操作单元5。
当致动构件7处于致动状态时,至少根据从控制装置6接收的控制信号,允许操纵系统4的控制,并且在适当的情况下,允许驱动运动的驱动系统3的至少一部分的控制,这些控制信号如上所述是操作者致动控制装置6的结果。
由于检测系统16的存在,当检测到操作者不存在的状态时,可以以高度响应的方式禁用特别是控制装置6对操纵系统4的控制。特别地,操作单元5配置成启动至少被称为存在计时器T2的计时器,该存在计时器限定致动构件7从致动状态转换到非致动状态的时间间隔,并且操作单元5配置成当由存在计时器T2限定的时间间隔已经过去时阻止使用控制装置6操作操纵系统4。操作单元5配置成至少根据由用于检测在所述站19处操作者的存在的检测系统16提供的信号来重置存在计时器T2。
实际上,操作单元5配置成只要检测到操作者不存在于驾驶员站19,就阻止存在计时器T2被重置。操作者的这种不存在可以对应于:
-或者,在操作室151的门19处于打开状态时没有来自驾驶员站15的座椅18所装备的存在检测传感器17的信号;
-或者,在门19处于关闭状态时没有来自驾驶员站15的座椅18所装备的存在检测传感器17的信号,在门处于打开状态时已开始没有来自存在检测传感器17的信号。
机器1包括至少一个被称为控制计时器的计时器T1,计时器T1限定可以是预定的或可调节的时间间隔。与存在计时器T2类似,该控制计时器T1以传统方式由时钟执行,并且时间递增或递减计数,直到由计时器T1或T2限定的时间间隔已经过去。所述时钟优选地结合到操作单元5中。当致动构件7从致动状态转换到非致动状态时,即当按钮被释放或手从面对电容传感器的位置移开时,该控制计时器T1启动。当控制计时器T1限定的时间间隔已过去时,操作单元5阻止使用控制装置6(即从控制装置6操作或通过控制装置操作)操作操纵系统4,并且还可能阻止使用控制装置6操作驱动底盘2运动的系统3的至少一部分。
为了防止机器1处于行驶阶段时的这种禁用,操作单元5配置成使得在由控制计时器T1限定的时间间隔过去的同时,控制计时器T1可以至少根据由感测机器1的行进速度的传感器8提供的数据而被重置,即,至少根据由感测机器1的行进速度的传感器8提供的数据,对由控制计时器T1限定的时间间隔可以恢复控制计时器T1的计数或相应地恢复控制计时器T1的倒计数。
特别地,机器1包括用于存储机器1的预定行进速度的存储器9,并且操作单元5配置成当由感测机器的行进速度的传感器8提供的机器1的行进速度大于存储在存储器中的预定速度时重置计时器T1。
因此,作为示例,操作单元5配置成当机器的速度例如大于1km/h时重置计时器T1。
以相同的方式,为了防止这种控制的禁用,当控制装置6由操作者致动时,操作单元5还配置成至少根据从控制装置6接收的控制信号来重置控制计时器T1。
因此,在致动构件7从致动状态转换到非致动状态之后,只要控制装置6被致动,即只要杆或由杆承载的任何一个控制元件在由控制计时器T1限定的时间间隔内被致动,则来自控制装置6的控制就保持可能(possible)。一旦控制装置6保持非致动的持续时间长于计时器T1预定的时间间隔,同时机器的行进速度低于预定速度,则来自控制装置6的该控制停止。需要致动构件7的进一步致动,以便恢复从控制装置6进行这种控制的可能性。
应当注意,存在计时器T2限定的时间间隔的持续时间短于控制计时器T1的时间间隔的持续时间,以便当检测到操作者不存在时尽可能快地禁用控制装置6的控制。在检测到操作者存在的情况下,如果控制装置6在由存在计时器T2限定的时间间隔内被致动或者如果机器的行进速度大于预定速度,则该存在计时器T2被重置。否则,不重置存在计时器T2。
控制方法的示例:
控制单元可以配置成实现用于控制机器的方法,如图6和图7中所描绘的。如下文所解释的,控制方法用于允许或阻止从控制装置6对操纵系统4的控制以及在适当的情况下对驱动机器的运动的系统3的至少一部分的控制,尤其是基于操作者在驾驶员站处的存在。根据一个特定方面,该方法被实时执行。在下文中,认为控制装置6能够产生用于控制操纵系统4和控制驱动机器的运动的驱动系统3的至少一部分的信号。作为变型,在不脱离本发明的范围的情况下,控制装置6可仅能够产生用于控制操纵系统4的信号。
在步骤S1中,致动构件7未被致动,并且阻止控制装置6对操纵系统4和运动驱动系统3的至少一部分的控制。
在步骤S2中,通过按压按钮或通过将手朝向电容传感器定位来使致动构件7致动。因此,向操作单元5提供致动信号。
在步骤S3中,操作单元基于该致动信号允许基于由控制装置6提供的控制信号来控制操纵系统4和驱动系统3的至少一部分。
在步骤S4中,该控制方法测试致动构件7是否处于非致动状态,即致动构件7是否正在提供致动构件7的非致动的信号。该控制方法循环执行步骤S4,直到致动构件7变为非致动。
在致动构件7的非致动状态下,控制方法继续进行到步骤S5,在步骤S5处启动限定例如5秒的时间间隔的计时器T2。开始计数5秒截止时间,并且控制方法行进到步骤S6。
在步骤S6中,检测系统16根据由用于感测操作者在驾驶员站15处存在、特别是驾驶员站15的座位18上存在的传感器17提供的信号,并且可能根据由检测门19的打开/关闭的传感器22提供的信号,并且根据所述信号的处理,来检测操作者在驾驶员站15处的存在或不存在。
当检测系统16包括存在传感器17时,例如如果存在传感器17没有提供信号,则检测到操作者不在驾驶员站,当检测系统16包括存在传感器17和检测门的打开/关闭的传感器22时,例如如果存在传感器17没有提供信号并且如果门被检测为打开,则检测到操作者不在驾驶员站。然后,控制方法进行到步骤S13,其检查由存在计时器T2限定的时间间隔是否已经过去。只要存在计时器T2的时间间隔没有过去,控制方法就循环测试步骤S11和S13。如果由存在计时器T2限定的时间间隔已经过去,则控制方法返回步骤S1。
相反,如果在步骤S6中,检测系统16根据由用于检测操作者在驾驶员站15处的存在的传感器17和由检测门的打开/关闭的传感器22提供的信号以及所述信号的处理而检测到操作者在驾驶员站处的存在,例如如果存在信号由存在传感器17提供,则控制方法继续进行到步骤S7。
在步骤S7中,将机器的速度与存储在存储器中且通常等于1km/h的阈值速度值进行比较。如果速度大于阈值速度,则控制方法返回到步骤S5以再次启动存在计时器T2,这对应于计时器T2的重置。因此,再次开始计数5秒截止时间。在该相同的步骤S7中,如果速度低于阈值,则测试控制装置6的致动。
操作单元5具有用于处理由控制装置6提供的控制信号的模块。在最简单的形式中,操作单元5仅接收由控制装置6提供的与信号类型无关的控制信号可被操作单元5认为表示对控制装置6的致动。如果致动控制装置6,则控制方法返回到步骤S5,在该步骤处,再次重置存在计时器T2。如果控制装置6未被致动,则控制方法行进到步骤S8,在步骤S8处将自从计时器T2被设定以来在由存在计时器T2限定的时间间隔内流逝的时间与计时器的时间间隔的总持续时间进行比较。当该流逝的时间大于由计时器限定的时间间隔的持续时间时,认为存在计时器T2已经超时,并且控制方法然后返回到步骤S1。否则,控制方法回到步骤S5以再次重置计时器T2,并可能重新执行步骤S6和步骤S7。
总之,在图6的该控制方法中,在致动构件7未被致动且存在计时器T2已经启动的状态下,当使用检测系统16检测到操作者不存在且自从计时器T2启动以来流逝的时间大于由所述计时器T2限定的时间间隔时,阻止使用控制装置6的控制,并且需要致动构件7的进一步致动以便能够从控制装置6至少控制操纵系统4。
在步骤S4中,控制方法并行地进行到步骤S5和步骤S9,在步骤S9处,启动称为控制计时器的计时器T1。
在步骤10中,将机器的速度与存储在存储器中的通常等于1km/h的阈值速度值进行比较。如果速度大于阈值速度,则控制方法返回到步骤S9以再次启动控制计时器T1,这对应于计时器T1的重置。因此,再次开始计数10秒截止时间。如果速度低于阈值速度,则控制方法继续进行到步骤S11,步骤S11以与步骤S7类似的方式测试控制设备6的致动。如果控制装置6被致动,则控制方法返回到步骤S9,在步骤S9处,控制计时器T1再次被重置。如果控制装置6未被致动,则控制方法继续到步骤S12,在步骤S12处,将从计时器T1被设定以来在由控制计时器T1限定的时间间隔内流逝的时间与计时器的时间间隔的总持续时间进行比较。当该流逝的时间大于由计时器限定的时间间隔的持续时间时,控制计时器T1被认为已经超时,并且控制方法然后返回到步骤S1。否则,控制方法回到步骤S9以再次重置控制计时器T1,并可能重新执行步骤S10和步骤S11。
因此,总之,在致动构件7未被致动且计时器T1已经启动的状态下,如果机器的行进速度小于1km/h且如果控制装置6在由计时器T1限定的时间间隔内未被致动,则当时间间隔T1结束时,阻止使用控制装置6的控制且需要致动构件7的进一步致动以便能够从控制装置6至少控制操纵系统4。
应当注意,由存在计时器T2限定的时间间隔比由控制计时器T1限定的时间间隔短。
尽管已经结合多个特定实施例描述了本发明,但是很明显,本发明不以任何方式限制于此,并且本发明涵盖所述装置的所有技术等同物及其组合,这些都落入本发明的范围内。
动词“具有”、“包括”和“包含”及其变型形式的使用不排除权利要求中列出的那些之外的元件或步骤的存在。
Claims (15)
1.一种用于操纵负载(24)的机器(1),所述机器包括:
-底盘(2),其装备有驾驶员站(15),
-负载操纵系统(4),其用于操纵负载并且由所述底盘承载,
-控制装置(6),其用于控制所述负载操纵系统(4),所述控制装置(6)能够被操作者手动致动,所述控制装置包括配置成被手动抓握的手动部分(61),
-操作单元(5),其配置成从所述控制装置(6)接收控制信号,
-致动构件(7),其用于致动所述能够被手动致动的控制装置(6),所述操作单元(5)配置成使得在所述致动构件(7)的致动状态下至少根据从所述控制装置(6)接收的所述控制信号而允许操作所述负载操纵系统(4),
所述驾驶员站(15)装备有检测系统(16),所述检测系统能够检测在所述站(15)处操作者的存在或不存在,所述检测系统(16)至少包括与所述控制装置(6)不同的存在传感器(17),
其特征在于,所述操作单元(5)配置成使得,当所述致动构件(7)处于所述致动构件(7)已经从所述致动状态转换到非致动状态之后的所述非致动状态时,所述操作单元至少根据由用于检测在所述站(15)处所述操作者的存在的所述检测系统(16)检测到的操作者不存在或操作者存在的状态来阻止或允许使用所述控制装置(6)操作所述负载操纵系统(4),
所述操作单元(5)配置成启动至少一个被称为存在计时器的计时器(T2),所述存在计时器限定所述致动构件(7)从所述致动状态转换到所述非致动状态的时间间隔,并且所述操作单元(5)配置成在由所述存在计时器(T2)限定的所述时间间隔已经过去时,阻止使用由所述控制装置(6)提供到所述操作单元(5)的所述控制信号操作所述负载操纵系统(4),并且所述操作单元(5)配置成至少根据由用于检测所述操作者在所述站(15)处的存在的所述检测系统(16)检测到的所述操作者不存在或所述操作者存在的状态来重置所述存在计时器(T2)。
2.根据权利要求1所述的用于操纵负载(24)的机器(1),其特征在于,所述机器(1)包括感测指示所述机器(1)的运动的参数的传感器(8),并且所述操作单元(5)配置成至少根据所述指示所述机器(1)的运动的参数而允许使用所述控制装置(6)操作所述负载操纵系统(4)。
3.根据权利要求2所述的用于操纵负载(24)的机器(1),其特征在于,指示所述机器(1)的运动的参数的所述传感器(8)是指示所述机器(1)的行进速度的参数的传感器(8),所述机器(1)包括用于存储所述机器(1)的预定行进速度的存储器(9),并且所述操作单元(5)配置成使得,当用于致动所述控制装置(6)的所述致动构件(7)处于所述非致动状态时,所述操作单元在由指示所述机器(1)的行进速度的参数的所述传感器(8)提供的所述机器的行进速度大于存储在所述存储器中的预定值的情况下允许使用所述控制装置(6)操作所述负载操纵系统(4)。
4.根据权利要求1至3中任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述操作单元(5)配置成当用于检测所述操作者在所述站(15)处的存在的所述检测系统(16)检测到所述操作者不存在时阻止所述存在计时器(T2)的重置。
5.根据权利要求1至3中任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述操作单元(5)配置成至少根据从所述控制装置(6)接收的所述控制信号来重置所述存在计时器(T2)。
6.根据权利要求2或3所述的用于操纵负载(24)的机器(1),其特征在于,所述操作单元(5)配置成根据由指示所述机器(1)的运动的参数的所述传感器(8)提供的数据来重置所述存在计时器(T2)。
7.根据权利要求2或3所述的用于操纵负载(24)的机器(1),其特征在于,所述操作单元(5)配置成启动至少一个被称为控制计时器的计时器(T1),所述控制计时器限定所述致动构件(7)从所述致动状态转换到所述非致动状态的时间间隔,并且所述操作单元(5)配置成在由所述控制计时器(T1)限定的所述时间间隔已经过去时阻止使用所述控制装置(6)操作所述负载操纵系统(4),并且所述操作单元(5)配置成至少根据由指示所述机器的运动的参数的所述传感器(8)提供的数据并且在适当的情况下至少根据从所述控制装置(6)接收的所述控制信号来重置所述控制计时器(T1)。
8.根据权利要求7所述的用于操纵负载(24)的机器(1),其特征在于,由所述控制计时器(T1)限定的所述时间间隔的持续时间大于由所述存在计时器(T2)限定的所述时间间隔的持续时间。
9.根据权利要求1至3中的任一项所述的用于操纵负载(24)的机器(1),其特征在于,用于控制所述负载操纵系统(4)的所述控制装置(6)是包括至少两个控制元件(10、11、12a、12b)的控制装置(6)。
10.根据权利要求9所述的用于操纵负载(24)的机器(1),其特征在于,所述底盘(2)是带有轮的底盘,所述机器(1)包括驱动所述底盘(2)的运动的驱动系统(3),用于控制所述负载操纵系统(4)的所述控制装置(6)是多功能控制装置(6),并且所述控制元件(10、11)中的至少一个控制元件(10)配置成控制所述负载操纵系统(4)的至少一部分,并且所述控制元件(10、11、12a、12b)中的其它控制元件(11)或另一控制元件(11)配置成控制驱动所述机器(1)的运动的所述驱动系统(3)的至少一部分。
11.根据权利要求1至3中的任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述致动构件(7)由用于控制所述负载操纵系统(4)的所述控制装置(6)承载。
12.根据权利要求1至3中的任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述致动构件(7)是用于检测操作者的手在所述控制装置(6)的所述手动部分(61)上的存在的传感器。
13.根据权利要求1至3中的任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述负载操纵系统(4)包括安装在所述底盘(2)上能围绕水平旋转轴线(21)旋转的至少一个操纵臂(13)和驱动所述操纵臂(13)围绕所述水平旋转轴线(21)运动的至少一个致动器(14)。
14.根据权利要求1至3中任一项所述的用于操纵负载(24)的机器(1),其特征在于,所述驾驶员站(15)采取操作室(151)的形式,在所述操作室内存在至少一个所述操作者能够坐在其上的座椅(18),所述操作室(151)通过门(19)关闭,并且用于检测在所述站(15)处操作者的存在的所述检测系统(16)的所述存在传感器(17)或所述存在传感器中的至少一个装备于所述座椅(18)。
15.根据权利要求14所述的用于操纵负载(24)的机器(1),其特征在于,用于检测所述站(15)处操作者的存在的所述检测系统(16)包括用于检测所述门(19)的打开和/或关闭的至少一个传感器(22)。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FRFR1906109 | 2019-06-07 | ||
| FRFR1906110 | 2019-06-07 | ||
| FR1906110A FR3096979B1 (fr) | 2019-06-07 | 2019-06-07 | Engin de manutention de charge, pelleteuse mécanique, chargeuse à godet ou autre et procédé de commande d'un engin de manutention de charge |
| FR1906109A FR3096978B1 (fr) | 2019-06-07 | 2019-06-07 | Engin de manutention de charge et procédé de commande d’un engin de manutention de charge |
| PCT/FR2020/050931 WO2020245532A1 (fr) | 2019-06-07 | 2020-06-02 | Engin de manutention de charge, pelleteuse mécanique, chargeuse à godet ou autre et procédé de commande d'un engin de manutention de charge |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113950552A CN113950552A (zh) | 2022-01-18 |
| CN113950552B true CN113950552B (zh) | 2023-04-11 |
Family
ID=71614918
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202080042175.2A Active CN113924398B (zh) | 2019-06-07 | 2020-06-02 | 负载操纵机器和控制负载操纵机器的方法 |
| CN202080042100.4A Active CN113950552B (zh) | 2019-06-07 | 2020-06-02 | 负载操纵机器以及用于控制负载操纵机器的方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202080042175.2A Active CN113924398B (zh) | 2019-06-07 | 2020-06-02 | 负载操纵机器和控制负载操纵机器的方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US12545564B2 (zh) |
| EP (2) | EP3980365B1 (zh) |
| CN (2) | CN113924398B (zh) |
| AU (2) | AU2020286671B2 (zh) |
| BR (1) | BR112021022608A2 (zh) |
| CA (2) | CA3137460C (zh) |
| WO (2) | WO2020245531A1 (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12545564B2 (en) * | 2019-06-07 | 2026-02-10 | Manitou Bf | Load handling machine, mechanical shovel, bucket loader or the like, and method for controlling a load handling machine |
| US12202715B2 (en) * | 2020-01-16 | 2025-01-21 | Xtreme Manufacturing, Llc | Telehandler boom auxiliary control panel |
| US11919756B2 (en) | 2020-02-04 | 2024-03-05 | Xtreme Manufacturing, Llc | Aerial work vehicle boom auxiliary control panel |
| FR3133605B1 (fr) | 2022-03-17 | 2024-03-01 | Manitou Bf | Machine de manutention comprenant un dispositif de commande sollicitable manuellement |
| DE102024110737A1 (de) * | 2024-04-17 | 2025-10-23 | Liebherr-Hydraulikbagger Gmbh | Vorrichtung zum Überwachen und Assistieren eines Bedieners einer Baumaschine |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5109945A (en) * | 1988-10-07 | 1992-05-05 | Sumitomo Yale Co., Ltd. | Safety device for use when driver leaves a seat of an industrial vehicle |
| EP0981078A2 (de) * | 1998-08-17 | 2000-02-23 | Deere & Company | Handbedienungselement |
| JP2005076321A (ja) * | 2003-09-01 | 2005-03-24 | Shin Caterpillar Mitsubishi Ltd | 建設機械の制御装置 |
| EP1953027A1 (fr) * | 2007-01-31 | 2008-08-06 | Bf Manitou | Dispositif de commande d'un engin de manutention |
| EP3431435A1 (fr) * | 2017-07-17 | 2019-01-23 | Manitou Bf | Commande d'une machine de manutention |
| WO2019039522A1 (ja) * | 2017-08-23 | 2019-02-28 | 住友建機株式会社 | ショベル |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6609357B1 (en) * | 2002-01-31 | 2003-08-26 | Delta Systems, Inc. | Lawn and garden control module |
| US6948398B2 (en) | 2002-07-22 | 2005-09-27 | Deere & Company | Joystick with enabling sensors |
| GB2404365B (en) * | 2003-07-30 | 2006-03-15 | Bamford Excavators Ltd | Load handling machine |
| FR2858861B1 (fr) | 2003-08-11 | 2007-06-22 | Manitou Bf | Dispositif de commande par interaction avec la main d'un operateur |
| US7677401B2 (en) | 2008-07-16 | 2010-03-16 | Manitowoc Crane Companies, Inc. | Load monitoring and control system with selective boom-up lockout |
| ITTO20110399A1 (it) | 2011-05-06 | 2012-11-07 | Merlo Project Srl | Veicolo sollevatore |
| US9777460B2 (en) * | 2015-10-22 | 2017-10-03 | Deere & Company | Operator control for work vehicles |
| EP3736245B2 (fr) * | 2019-05-10 | 2025-02-26 | Manitou Bf | Commande d'une machine de manutention |
| US12545564B2 (en) * | 2019-06-07 | 2026-02-10 | Manitou Bf | Load handling machine, mechanical shovel, bucket loader or the like, and method for controlling a load handling machine |
-
2020
- 2020-06-02 US US17/613,704 patent/US12545564B2/en active Active
- 2020-06-02 CN CN202080042175.2A patent/CN113924398B/zh active Active
- 2020-06-02 EP EP20740365.0A patent/EP3980365B1/fr active Active
- 2020-06-02 CA CA3137460A patent/CA3137460C/fr active Active
- 2020-06-02 AU AU2020286671A patent/AU2020286671B2/en active Active
- 2020-06-02 WO PCT/FR2020/050930 patent/WO2020245531A1/fr not_active Ceased
- 2020-06-02 CN CN202080042100.4A patent/CN113950552B/zh active Active
- 2020-06-02 CA CA3137452A patent/CA3137452C/fr active Active
- 2020-06-02 BR BR112021022608A patent/BR112021022608A2/pt unknown
- 2020-06-02 AU AU2020286981A patent/AU2020286981B2/en active Active
- 2020-06-02 US US17/613,706 patent/US12180050B2/en active Active
- 2020-06-02 EP EP20740364.3A patent/EP3980364B1/fr active Active
- 2020-06-02 WO PCT/FR2020/050931 patent/WO2020245532A1/fr not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5109945A (en) * | 1988-10-07 | 1992-05-05 | Sumitomo Yale Co., Ltd. | Safety device for use when driver leaves a seat of an industrial vehicle |
| EP0981078A2 (de) * | 1998-08-17 | 2000-02-23 | Deere & Company | Handbedienungselement |
| JP2005076321A (ja) * | 2003-09-01 | 2005-03-24 | Shin Caterpillar Mitsubishi Ltd | 建設機械の制御装置 |
| EP1953027A1 (fr) * | 2007-01-31 | 2008-08-06 | Bf Manitou | Dispositif de commande d'un engin de manutention |
| EP3431435A1 (fr) * | 2017-07-17 | 2019-01-23 | Manitou Bf | Commande d'une machine de manutention |
| WO2019039522A1 (ja) * | 2017-08-23 | 2019-02-28 | 住友建機株式会社 | ショベル |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2020286671B2 (en) | 2025-09-18 |
| CN113924398A (zh) | 2022-01-11 |
| AU2020286981A1 (en) | 2021-12-02 |
| AU2020286981B2 (en) | 2025-11-06 |
| US20220227610A1 (en) | 2022-07-21 |
| US12545564B2 (en) | 2026-02-10 |
| CA3137460A1 (fr) | 2020-12-10 |
| CA3137452C (fr) | 2025-06-10 |
| WO2020245532A1 (fr) | 2020-12-10 |
| CA3137460C (fr) | 2025-01-21 |
| US20220227611A1 (en) | 2022-07-21 |
| EP3980364A1 (fr) | 2022-04-13 |
| EP3980365B1 (fr) | 2023-11-08 |
| CN113924398B (zh) | 2023-07-07 |
| BR112021023070A2 (pt) | 2022-04-19 |
| WO2020245531A1 (fr) | 2020-12-10 |
| CA3137452A1 (fr) | 2020-12-10 |
| EP3980364B1 (fr) | 2023-11-08 |
| BR112021022608A2 (pt) | 2022-01-04 |
| EP3980365A1 (fr) | 2022-04-13 |
| US12180050B2 (en) | 2024-12-31 |
| CN113950552A (zh) | 2022-01-18 |
| AU2020286671A1 (en) | 2021-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113950552B (zh) | 负载操纵机器以及用于控制负载操纵机器的方法 | |
| US9132855B2 (en) | Electronic tag along | |
| CN207750301U (zh) | 用于作业车辆的双模式控制系统 | |
| US20150183482A1 (en) | Mobile body | |
| WO2015132178A1 (en) | Working machine with return-to-dig functionality | |
| US20130158817A1 (en) | Controlling a bowl of a scraper | |
| RU2806702C2 (ru) | Погрузочно-разгрузочная машина, экскаватор, ковшовый погрузчик или тому подобное и способ управления погрузочно-разгрузочной машиной | |
| RU2804569C2 (ru) | Погрузочно-разгрузочная машина и способ управления погрузочно-разгрузочной машиной | |
| JPH086352B2 (ja) | バックホウのバックホウ装置操作構造 | |
| CN112112204A (zh) | 包括自动倾卸控制的工业机器 | |
| JP3019361B2 (ja) | 油圧制御装置 | |
| JP3720660B2 (ja) | コンバイン | |
| JP2539036Y2 (ja) | 作業用走行車における作業部の昇降制御装置 | |
| BR112021023070B1 (pt) | Veículo de manuseio de carga e processo de controle de um veículo de manuseio de carga | |
| JPH0534279B2 (zh) | ||
| JP5758271B2 (ja) | 水平制御装置 | |
| JP3577774B2 (ja) | オートリフト装置 | |
| JPH0739701Y2 (ja) | 対地作業車におけるpto軸の駆動制御装置 | |
| CN118007572A (zh) | 单开关铲雪机和动力工具、以及操作方法 | |
| JP2023074348A (ja) | コンバイン | |
| FR3096979A1 (fr) | Engin de manutention de charge, pelleteuse mécanique, chargeuse à godet ou autre et procédé de commande d'un engin de manutention de charge | |
| JP2015175157A (ja) | 建設機械の操作器 | |
| JPH08154417A (ja) | トラクタ−の作業機昇降制御装置 | |
| JPH0548085B2 (zh) | ||
| JPH0650406U (ja) | 作業用走行車における方向センサの自動格納装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |