CN113682829A - 一种机器人多功能复合夹具 - Google Patents
一种机器人多功能复合夹具 Download PDFInfo
- Publication number
- CN113682829A CN113682829A CN202111057374.3A CN202111057374A CN113682829A CN 113682829 A CN113682829 A CN 113682829A CN 202111057374 A CN202111057374 A CN 202111057374A CN 113682829 A CN113682829 A CN 113682829A
- Authority
- CN
- China
- Prior art keywords
- grabbing
- bucket
- splint
- fixture
- connecting seat
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G61/00—Use of pick-up or transfer devices or of manipulators for stacking or de-stacking articles not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/16—Stacking of articles of particular shape
- B65G57/20—Stacking of articles of particular shape three-dimensional [3D], e.g. cubiform or cylindrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0241—Barrels, drums
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0258—Trays, totes or bins
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明涉及一种机器人多功能复合夹具,包括支撑架,以及安装在支撑架上的箱抓取夹具和桶抓取夹具;箱抓取夹具包括与支撑架固接的固定夹板、与所述固定夹板相对设置的活动夹板,以及驱动活动夹板朝向固定夹板移动的推动机构;所述桶抓取夹具包括连接座、驱动连接座沿竖向移动的升降机构,以及安装在连接座上的抓取机构,抓取机构的抓取口位于连接座的下方。本发明通过将箱抓取夹具和桶抓取夹具复合设置在同一支撑架上,实现了对纸箱和桶的抓取,既无需设置多台机器人,又不需更换夹具就可以完成桶包装和纸箱包装两种包装形式产品的抓取、码垛生产任务;将桶抓取夹具设置在固定夹板和活动夹板之间,结构紧凑,节省了复合夹具占用的空间。
Description
技术领域
本发明涉及机器人用的夹具技术领域,具体是指一种机器人多功能复合夹具。
背景技术
在工厂生产中,有时在一个车间内需要同时生产不同种类、不同状态的产品,这些产品在包装时也会有很大的差异,比如桶包装或纸箱包装等。由于包装桶和包装纸箱的外形、结构截然不同,因此需要不同的夹具进行抓取和码垛等操作。目前主要有两种抓取方式,一种是设置两台转运机器人,两台机器人的自由端分别安装不同的夹具,此种方式成本高,占用车间的空间较大;另一种是设置一台机器人,根据要抓取的产品包装形式更换对应的夹具,此种方式在使用时比较费时间,工作效率较低。
发明内容
本发明针对现有技术的不足,提供一种机器人多功能复合夹具,使机器人满足桶包装和纸箱包装两种包装形式的抓取和码垛功能,实现两种包装形式下的错时抓取和码垛。
本发明是通过如下技术方案实现的,提供一种机器人多功能复合夹具,包括支撑架,以及安装在支撑架上的箱抓取夹具和桶抓取夹具;
所述箱抓取夹具包括与支撑架固接的固定夹板、与所述固定夹板相对设置的活动夹板,以及驱动所述活动夹板朝向固定夹板移动的推动机构;
所述桶抓取夹具包括连接座、驱动所述连接座沿竖向移动的升降机构,以及安装在连接座上的抓取机构,抓取机构的抓取口位于连接座的下方。
本方案在使用时安装在机器人的抓取自由端,通过箱抓取夹具对纸箱进行抓取,通过桶抓取夹具对桶提手进行抓取,抓取纸箱时,活动夹板和固定夹板分别位于待抓取纸箱的两侧,通过推动机构将活动夹板向固定夹板推动,实现对纸箱的夹紧;抓取桶时,通过升降机构推动连接座下移,使抓取机构的抓取口与桶提手对应,通过抓取口的闭合实现对桶提手的抓取。
作为优化,固定夹板和活动夹板均沿竖向延伸,活动夹板与固定夹板之间设有桶抓取夹具,桶抓取夹具的下端高于活动夹板的下端和固定夹板的下端。本优化方案的设置,减小了复合夹具的外廓体积,节约了空间,在对桶进行抓取时,活动夹板远离固定夹板,避免与待抓取的桶干涉,桶抓取夹具下方为待抓取的桶,在对纸箱进行抓取时,待抓取的纸箱位于桶抓取夹具的下方,桶抓取夹具沿横向的长度尺寸小于待抓取的纸箱横向尺寸,以保证对纸箱的夹紧。
作为优化,活动夹板上设有防掉落板和驱动防掉落板移动至被抓取纸箱下方的防掉落驱动装置。本优化方案的设置,在将纸箱夹紧后,通过防掉落驱动装置将防掉落板移动至被抓取的纸箱下方,对被抓取的纸箱形成支撑,以防止纸箱在被移动过程中掉落。
作为优化,活动夹板上通过横轴铰接有与所述防掉落板固接的旋转座,防掉落驱动装置为驱动所述旋转座绕横轴转动的驱动气缸。本优化方案通过驱动气缸的伸缩动作使旋转座绕横轴转动,从而带动防掉落板移至或远离被抓取纸箱的下方,结构简单,动作快捷方便。
作为优化,所述抓取机构包括安装在连接座上的手指气缸,手指气缸的两活动手指朝下设置且分别安装有抓桶夹具,两抓桶夹具形成与桶提手适配的抓取口。本优化方案的抓取机构结构简单,通过手指气缸带动抓桶夹具动作实现对桶提手的抓取,动作迅速,夹持可靠,避免了桶在移动时掉落。
作为优化,连接座上还设有分别位于抓桶夹具两侧的防晃装置,防晃装置的下端延伸至被抓取桶的桶体。本优化方案通过设置两防晃装置,分别限制桶体向两侧晃动,提高了移桶过程的稳定性和桶放置的位置精度。
作为优化,所述防晃装置包括与连接座固接的按压气缸,按压气缸的伸出端朝下设置且连接有压板。本优化方案的防晃装置通过按压气缸推出压板实现防晃,在将桶体放下后,将压板收回,避免以方便对下一桶提手的抓取。
本发明的有益效果为:通过将箱抓取夹具和桶抓取夹具复合设置在同一支撑架上,实现了对纸箱和桶的抓取,既无需设置多台机器人,又不需更换夹具就可以完成桶包装和纸箱包装两种包装形式产品的抓取、码垛生产任务;将桶抓取夹具设置在固定夹板和活动夹板之间,结构紧凑,节省了复合夹具占用的空间。
附图说明
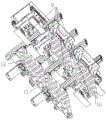
图1为本发明多功能复合夹具的上立体图;
图2为本发明多功能复合夹具的下立体图;
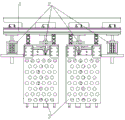
图3为本发明多功能复合夹具的主视图;
图4为本发明多功能复合夹具的侧视图;
图中所示:
1、支撑架,2、桶抓取夹具,3、箱抓取夹具,4、升降机构,5、连接座,6、按压气缸,7、压板,8、抓桶夹具, 9、手指气缸,10、固定夹板,11、防掉落板,12、活动夹板,13、防掉落驱动装置,14、推动机构,15、旋转座。
具体实施方式
为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
如图1所示一种机器人多功能复合夹具,包括支撑架1,以及安装在支撑架上的箱抓取夹具3和桶抓取夹具2,实际使用时将支撑架与机器人的自由端连接,通过机器人带动整个复合夹具移动至纸箱或油桶的上方,进行抓取动作,本实施例的箱抓取夹具3为两个,可以同时抓取两个纸箱,桶抓取夹具2为四个,可以同时抓取四个油桶。
箱抓取夹具3包括与支撑架固接的固定夹板10、与所述固定夹板相对设置的活动夹板12,以及驱动所述活动夹板朝向固定夹板移动的推动机构14,本实施例的推动机构为沿横向设置的推动气缸,保证夹紧动作的快速准确。固定夹板和活动夹板均自支撑架的底部向下竖向延伸,活动夹板与固定夹板之间设有桶抓取夹具,桶抓取夹具的下端在竖直方向上高于活动夹板的下端和固定夹板的下端,以给被抓取的纸箱留有空间,桶抓取夹具沿横向的长度尺寸小于待抓取的纸箱横向尺寸,以保证活动夹板和固定夹板均可与纸箱紧密接触,从而实现对纸箱的夹紧。
为防止纸箱掉落,本实施例在活动夹板上设有防掉落板11和驱动防掉落板移动至被抓取纸箱下方的防掉落驱动装置13,活动夹板上通过横轴铰接有与所述防掉落板固接的旋转座15,防掉落驱动装置13为驱动所述旋转座绕横轴转动的驱动气缸,且驱动气缸设置在活动夹板远离固定夹板的一侧,驱动气缸伸出时,推动旋转座正向旋转90°,使防掉落板转至被抓取纸箱的下方,驱动气缸缩回时,推动旋转座反向旋转90°,使防掉落板远离被抓取纸箱的下方,以方便将纸箱放下。
抓取纸箱时,通过推动气缸的伸出将活动夹板向固定夹板推动,实现对纸箱的夹紧,随后防掉落板在驱动气缸的推动下旋转至纸箱下方,对纸箱形成支撑,避免纸箱中途滑落,当在机器人的作用下到达指定位置后,所有气缸收回,将纸箱放下,等待抓取桶。
桶抓取夹具2包括连接座5、驱动所述连接座5沿竖向移动的升降机构4,以及安装在连接座上的抓取机构,抓取机构的抓取口位于连接座的下方,其中升降机构4为竖向设置的抓桶气缸,抓桶气缸的伸出端朝下设置,连接座连接在抓桶气缸的下端。所述抓取机构包括安装在连接座上的手指气缸9,手指气缸9的两活动手指朝下设置且分别安装有抓桶夹具8,两抓桶夹具8形成与桶提手适配的抓取口,抓桶夹具采用现有技术即可。
为了避免油桶在被抓取后出现晃动,本实施例在连接座上还设有分别位于抓桶夹具两侧的防晃装置,防晃装置的下端延伸至被抓取桶的桶体。具体的,所述防晃装置包括与连接座5固接的按压气缸6,按压气缸的伸出端朝下设置且连接有压板7,压板为塑料板,避免对油桶造成划伤。
在抓取桶时,抓桶夹具为打开状态,抓桶手指气缸为常开状态,开始工作后,抓桶气缸向下伸出,带动下方机构下降到指定位置后,手指气缸闭合带动抓桶夹具夹紧桶的把手,按压气缸6伸出,带动塑料压板将桶左右两侧固定,使其不能自由晃动。当在机器人将油桶搬运到指定位置后,手指气缸打开,将桶放下,按压气缸收回,等待抓取纸箱。
本发明的复合夹具结构紧凑,空间布局合理,对工作空间要求小;可以实现对桶、箱两种不同类型物品的抓取;零部件更换方便,易于维护,使用范围广。
当然,上述说明也并不仅限于上述举例,本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本发明的技术方案并非是对本发明的限制,参照优选的实施方式对本发明进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换都不脱离本发明的宗旨,也应属于本发明的权利要求保护范围。
Claims (7)
1.一种机器人多功能复合夹具,其特征在于:包括支撑架(1),以及安装在支撑架上的箱抓取夹具(3)和桶抓取夹具(2);
所述箱抓取夹具(3)包括与支撑架固接的固定夹板(10)、与所述固定夹板相对设置的活动夹板(12),以及驱动所述活动夹板朝向固定夹板移动的推动机构(14);
所述桶抓取夹具(2)包括连接座(5)、驱动所述连接座(5)沿竖向移动的升降机构(4),以及安装在连接座上的抓取机构,抓取机构的抓取口位于连接座的下方。
2.根据权利要求1所述的一种机器人多功能复合夹具,其特征在于:固定夹板和活动夹板均沿竖向延伸,活动夹板与固定夹板之间设有桶抓取夹具,桶抓取夹具的下端高于活动夹板的下端和固定夹板的下端。
3.根据权利要求2所述的一种机器人多功能复合夹具,其特征在于:活动夹板上设有防掉落板(11)和驱动防掉落板移动至被抓取纸箱下方的防掉落驱动装置(13)。
4.根据权利要求3所述的一种机器人多功能复合夹具,其特征在于:活动夹板上通过横轴铰接有与所述防掉落板固接的旋转座(15),防掉落驱动装置(13)为驱动所述旋转座绕横轴转动的驱动气缸。
5.根据权利要求1所述的一种机器人多功能复合夹具,其特征在于:所述抓取机构包括安装在连接座上的手指气缸(9),手指气缸(9)的两活动手指朝下设置且分别安装有抓桶夹具(8),两抓桶夹具(8)形成与桶提手适配的抓取口。
6.根据权利要求5所述的一种机器人多功能复合夹具,其特征在于:连接座上还设有分别位于抓桶夹具两侧的防晃装置,防晃装置的下端延伸至被抓取桶的桶体。
7.根据权利要求6所述的一种机器人多功能复合夹具,其特征在于:所述防晃装置包括与连接座(5)固接的按压气缸(6),按压气缸的伸出端朝下设置且连接有压板(7)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111057374.3A CN113682829A (zh) | 2021-09-09 | 2021-09-09 | 一种机器人多功能复合夹具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111057374.3A CN113682829A (zh) | 2021-09-09 | 2021-09-09 | 一种机器人多功能复合夹具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113682829A true CN113682829A (zh) | 2021-11-23 |
Family
ID=78586191
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111057374.3A Pending CN113682829A (zh) | 2021-09-09 | 2021-09-09 | 一种机器人多功能复合夹具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113682829A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115723164A (zh) * | 2022-11-03 | 2023-03-03 | 珠海格力智能装备有限公司 | 复式夹具及抓取机器人 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107555157A (zh) * | 2017-08-25 | 2018-01-09 | 佛山建邦机械有限公司 | 一种两用机器人抓手 |
| CN208037523U (zh) * | 2018-01-24 | 2018-11-02 | 常州瑷尔恒自动化设备有限公司 | 多功能抓手 |
| CN208262867U (zh) * | 2018-01-24 | 2018-12-21 | 常州瑷尔恒自动化设备有限公司 | 可调式抓手装置 |
| CN209796873U (zh) * | 2019-01-18 | 2019-12-17 | 济南翼菲自动化科技有限公司 | 一种串联码垛机器人抓手 |
| CN213009008U (zh) * | 2020-07-29 | 2021-04-20 | 天津华万机器人科技有限公司 | 一种用于桶类的抓取机构及自动装箱机 |
| CN215885555U (zh) * | 2021-09-09 | 2022-02-22 | 胡玉洋 | 一种机器人多功能复合夹具 |
-
2021
- 2021-09-09 CN CN202111057374.3A patent/CN113682829A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107555157A (zh) * | 2017-08-25 | 2018-01-09 | 佛山建邦机械有限公司 | 一种两用机器人抓手 |
| CN208037523U (zh) * | 2018-01-24 | 2018-11-02 | 常州瑷尔恒自动化设备有限公司 | 多功能抓手 |
| CN208262867U (zh) * | 2018-01-24 | 2018-12-21 | 常州瑷尔恒自动化设备有限公司 | 可调式抓手装置 |
| CN209796873U (zh) * | 2019-01-18 | 2019-12-17 | 济南翼菲自动化科技有限公司 | 一种串联码垛机器人抓手 |
| CN213009008U (zh) * | 2020-07-29 | 2021-04-20 | 天津华万机器人科技有限公司 | 一种用于桶类的抓取机构及自动装箱机 |
| CN215885555U (zh) * | 2021-09-09 | 2022-02-22 | 胡玉洋 | 一种机器人多功能复合夹具 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115723164A (zh) * | 2022-11-03 | 2023-03-03 | 珠海格力智能装备有限公司 | 复式夹具及抓取机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107443407B (zh) | 铸造机器人用可翻转式多指异步抓手 | |
| JPH0743056Y2 (ja) | 荷役機械 | |
| CN204397891U (zh) | 新型机械臂 | |
| CN217434358U (zh) | 一种新型分拣机器人 | |
| CN216104878U (zh) | 一种兼容抓袋抓箱的码垛装置 | |
| CN215885555U (zh) | 一种机器人多功能复合夹具 | |
| CN113682829A (zh) | 一种机器人多功能复合夹具 | |
| CN114030872A (zh) | 一种龙门桁架式搬运机械手 | |
| CN203229216U (zh) | 一种箱体码垛抓手 | |
| CN205442024U (zh) | 组合式码垛机械手 | |
| CN209478221U (zh) | 一种柔性抓取装置 | |
| CN106426252B (zh) | 具有输送功能的机械手终端夹具 | |
| CN212075674U (zh) | 一种多功能机械手 | |
| CN206154337U (zh) | 具有输送功能的机械手终端夹具 | |
| CN219636544U (zh) | 纸箱抓取装置 | |
| CN217228181U (zh) | 一种链板输送线的抓取系统 | |
| CN219031018U (zh) | 一种用于面粉自动码垛机的夹持机构 | |
| CN219603047U (zh) | 一种铍铜料块的转运装置 | |
| CN215159211U (zh) | 一种烟包托盘拆垛装置 | |
| CN108861579A (zh) | 一种块状物体夹持搬运装置 | |
| CN214988617U (zh) | 一种用于抓取通风管角铁法兰的机械手 | |
| CN214421704U (zh) | 一种抓取夹具及机械手 | |
| CN212044803U (zh) | 一种机器人用动力抓具 | |
| CN209721007U (zh) | 一种夹持稳定的新型码垛机器人抓手 | |
| CN220200714U (zh) | 一种用于件烟拆码垛的机器人夹具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20211123 |