CN111055272B - 一种把控性强的机器爪 - Google Patents
一种把控性强的机器爪 Download PDFInfo
- Publication number
- CN111055272B CN111055272B CN201911301916.XA CN201911301916A CN111055272B CN 111055272 B CN111055272 B CN 111055272B CN 201911301916 A CN201911301916 A CN 201911301916A CN 111055272 B CN111055272 B CN 111055272B
- Authority
- CN
- China
- Prior art keywords
- plate
- fixed
- plates
- blocks
- grooves
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
Abstract
本发明公开了一种把控性强的机器爪,包括固定板,固定板的顶部固定连接有固定盒,固定盒的顶部固定安装有伺服电机,固定盒内纵向转动安装有螺纹杆,伺服电机的输出轴与螺纹杆的顶端固定安装,螺纹杆上螺纹连接有固定块,固定块与固定盒滑动连接,固定板的底部开设有四个凹槽,四个凹槽相互垂直,四个凹槽内均滑动安装有滑动块,四个滑动块均与固定块相配合,四个凹槽内均转动安装有丝杠,滑动块与对应的丝杠螺纹连接。本发明为一种把控性强的机器爪,采用四个侧面挤压板对物体进行侧面挤压固定可以起到第一次固定抓取,采用四个抄底板对物体进行抄底并相互靠近进一步抓取,可以提高固定效果和把控强度。
Description
技术领域
本发明涉及机器抓技术领域,具体为一种把控性强的机器爪。
背景技术
在工业生产或生活中经常见到机器工作取放物体,而机器取放物体多使用机器爪对物体进行抓取,常见的机器爪种类较多,通过电机或液压等动力设备驱动两个或多个抓夹相互靠近将物体抓取,实现机器爪抓取物体的目的。
目前,机器爪结构简单,只能通过抓夹相互靠近对物体进行固定夹持,固定抓取效果差,把控性弱,所以这里设计了一种把控性强的机器爪,以便于解决上述问题。
发明内容
本发明的目的在于提供一种把控性强的机器爪,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种把控性强的机器爪,包括固定板,固定板的顶部固定连接有固定盒,固定盒的顶部固定安装有伺服电机,固定盒内纵向转动安装有螺纹杆,伺服电机的输出轴与螺纹杆的顶端固定安装,螺纹杆上螺纹连接有固定块,固定块与固定盒滑动连接,固定板的底部开设有四个凹槽,四个凹槽相互垂直,四个凹槽内均滑动安装有滑动块,四个滑动块均与固定块相配合,四个凹槽内均转动安装有丝杠,滑动块与对应的丝杠螺纹连接,滑动块的底部固定安装有侧面挤压板,侧面挤压板上转动安装有抄底板,抄底板上固定安装有助力板,助力板与对应的丝杠相配合。
优选的,四个凹槽的顶部内壁上均开设有活动孔,四个活动孔内均滑动安装有移动块,固定块的外侧转动安装有四个斜杆的一端,四个斜杆的另一端分别与四个移动块转动连接。
优选的,所述固定板上开设有四个腔体,四个腔体内均纵向转动安装有转动杆,丝杠与对应的转动杆相配合,转动杆上螺纹连接有丝杆,助力板的顶部开设有导向槽,导向槽内滑动安装有导向块,丝杆与对应的导向块转动连接。
优选的,所述丝杠的一端延伸至对应的腔体内并固定安装有第一锥齿轮,转动杆的外侧固定安装有第二锥齿轮,第一锥齿轮与第二锥齿轮啮合。
优选的,所述侧面挤压板的一侧固定安装有挤压板,挤压板上滑动安装有缓冲板,缓冲板的一侧开设有缓冲槽,挤压板与对应的缓冲槽滑动连接,挤压板与对应的缓冲槽之间固定安装有多个缓冲簧。
优选的,所述缓冲槽的两侧内壁上均开设有限位槽,限位槽内滑动安装有限位块,限位块与对应的挤压板固定连接。
优选的,所述固定盒的顶部内壁和底部内壁之间固定安装有两个限位杆,固定块与两个限位杆滑动连接。
优选的,所述固定盒的外侧开设有四个方形孔,四个斜杆分别与四个方形孔活动连接,固定盒的顶部固定安装有两个安装块。
优选的,其具体使用方法为:
(A1)、使用前,将两个安装块与机器连接,将伺服电机接通控制器和电源,抓取物体时,使得四个抄底板和四个侧面挤压板均位于物体的外侧,启动伺服电机,伺服电机带动螺纹杆转动,螺纹杆带动固定块向上运动,其中两个限位杆对固定块起到限位和导向的作用;
(A2)、固定块向上运动通过四个斜杆带动四个移动块相互靠近,四个移动块分别带动四个滑动块相互靠近,四个滑动块分别带动四个丝杠转动,四个滑动块分别带动四个侧面挤压板相互靠近,四个侧面挤压板通过四个缓冲板与物体接触挤压,将物体的四个方位同时压紧固定;
(A3)、缓冲板与物体接触时受到挤压,通过缓冲簧起到缓冲的作用,可以缓解缓冲板与物体刚接触时的冲击,起到缓冲保护的作用;
(A4)、丝杠转动时,由于设置了第一锥齿轮和第二锥齿轮,使得丝杠带动对应的转动杆转动,转动杆带动对应的丝杆向下运动,丝杆通过导向块推动助力板翻转,助力板带动对应的抄底板翻转对物体进行抄底,同时四个抄底板相互靠近,可以同时对物体进行抄底抓取,本发明采用四个侧面挤压板对物体进行侧面挤压固定可以起到第一次固定抓取,采用四个抄底板对物体进行抄底并相互靠近抓取,可以提高固定效果。
与现有技术相比,本发明的有益效果是:
1.本发明为一种把控性强的机器爪,通过四个滑动块分别带动四个侧面挤压板相互靠近,四个侧面挤压板通过四个缓冲板与物体接触挤压,将物体的四个方位同时压紧固定;
2.通过缓冲板与物体接触时受到挤压,通过缓冲簧起到缓冲的作用,可以缓解缓冲板与物体刚接触时的冲击,起到缓冲保护的作用;
3.通过助力板带动对应的抄底板翻转对物体进行抄底,同时四个抄底板相互靠近,可以同时对物体进行抄底抓取。
4.本发明采用四个侧面挤压板对物体进行侧面挤压固定可以起到第一次固定抓取,采用四个抄底板对物体进行抄底并相互靠近进一步抓取,可以提高固定效果和把控强度。
附图说明
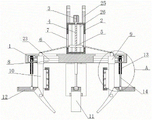
图1为本发明主体结构示意图;
图2为本发明的俯视结构示意图;
图3为本发明的图1中A处结构放大图;
图4为本发明的固定盒和安装板的立体连接结构示意图;
图5为本发明的助力板和抄底板的立体连接结构示意图。
图中:1、固定板;2、固定盒;3、伺服电机;4、螺纹杆;5、固定块;6、斜杆;7、方形孔;8、凹槽;9、滑动块;10、侧面挤压板;11、抄底板;12、助力板;13、转动杆;14、丝杆;15、移动块;16、导向槽;17、导向块;18、第一锥齿轮;19、第二锥齿轮;20、挤压板;21、缓冲板;22、缓冲簧;23、丝杠;24、缓冲槽;25、安装块;26、限位杆;27腔体。
具体实施方式
本申请实施例通过提供一种把控性强的机器爪,解决了现有技术中提出的问题。下面将结合本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
请参阅图1-5,本实施例提供了一种把控性强的机器爪,包括固定板1,固定板1的顶部固定连接有固定盒2,固定盒2对伺服电机3起到支撑作用,固定盒2的顶部固定安装有伺服电机3,伺服电机3提供抓取物体的动力,固定盒2内纵向转动安装有螺纹杆4,伺服电机3的输出轴与螺纹杆4的顶端固定安装,螺纹杆4上螺纹连接有固定块5,螺纹杆4转动可以带动固定块5移动,固定块5与固定盒2滑动连接,固定板1的底部开设有四个凹槽8,四个凹槽8相互垂直,四个凹槽8内均滑动安装有滑动块9,四个滑动块9均与固定块5相配合,四个凹槽8内均转动安装有丝杠23,滑动块9与对应的丝杠 23螺纹连接,滑动块9移动可以带动对应的丝杠23转动,滑动块9的底部固定安装有侧面挤压板10,侧面挤压板10用来对物体侧面进行固定,侧面挤压板10上转动安装有抄底板11,抄底板11对物体底部进行抓取,抄底板11上固定安装有助力板12,助力板12用来带动抄底板11翻转,助力板12与对应的丝杠23相配合。
本实施例中,使用前,将两个安装块25与机器连接,将伺服电机3接通控制器和电源,抓取物体时,使得四个抄底板11和四个侧面挤压板10均位于物体的外侧,启动伺服电机3,伺服电机3带动螺纹杆4转动,螺纹杆4带动固定块5向上运动,固定块5向上运动通过四个斜杆6带动四个移动块15 相互靠近,四个移动块15分别带动四个滑动块9相互靠近,四个滑动块9分别带动四个丝杠23转动,四个滑动块9分别带动四个侧面挤压板10相互靠近,四个侧面挤压板10通过四个缓冲板21与物体接触挤压,将物体的四个方位同时压紧固定,缓冲板21与物体接触时受到挤压,通过缓冲簧22起到缓冲的作用,可以缓解缓冲板21与物体刚接触时的冲击,由于设置了第一锥齿轮18和第二锥齿轮19,使得丝杠23带动对应的转动杆13转动,转动杆 13带动对应的丝杆14向下运动,丝杆14通过导向块17推动助力板12翻转,助力板12带动对应的抄底板11翻转对物体进行抄底,同时四个抄底板11相互靠近,可以同时对物体进行抄底抓取,本发明采用四个侧面挤压板10对物体进行侧面挤压固定可以起到第一次固定抓取,采用四个抄底板11对物体进行抄底并相互靠近抓取,将物体移动到合适位置后,反向开启伺服电机3,使得固定块5向下运动,使得四个侧面挤压板10相互远离将物体松开,同时四个抄底板11翻转相互远离,将物体放下即可。
实施例二
请参阅图1-5,在实施例1的基础上做了进一步改进:
四个凹槽8的顶部内壁上均开设有活动孔,四个活动孔内均滑动安装有移动块15,固定块5的外侧转动安装有四个斜杆6的一端,四个斜杆6的另一端分别与四个移动块15转动连接,固定块5移动可以通过斜杆6带动对应的移动块15移动,固定板1上开设有四个腔体27,四个腔体27内均纵向转动安装有转动杆13,丝杠23与对应的转动杆13相配合,转动杆13上螺纹连接有丝杆14,助力板12的顶部开设有导向槽16,导向槽16内滑动安装有导向块17,丝杆14与对应的导向块17转动连接,导向块17在导向槽16内滑动可以满足助力板12的移动,导向块17在导向槽16内滑动可以保证丝杆14 不会转动,丝杠23的一端延伸至对应的腔体27内并固定安装有第一锥齿轮 18,转动杆13的外侧固定安装有第二锥齿轮19,第一锥齿轮18与第二锥齿轮19啮合,丝杠23通过第一锥齿轮18和第二锥齿轮19带动转动杆13转动,侧面挤压板10的一侧固定安装有挤压板20,挤压板20上滑动安装有缓冲板 21,缓冲板21的一侧开设有缓冲槽24,挤压板20与对应的缓冲槽24滑动连接,挤压板20与对应的缓冲槽24之间固定安装有多个缓冲簧22,缓冲簧22 为缓冲板21提供弹力,可以缓解缓冲板21与物体接触时的冲击力,缓冲槽 24的两侧内壁上均开设有限位槽,限位槽内滑动安装有限位块,限位块与对应的挤压板20固定连接,限位块与限位槽的配合可以对缓冲板21进行限位,固定盒2的顶部内壁和底部内壁之间固定安装有两个限位杆26,固定块5与两个限位杆26滑动连接,限位杆26对固定块5起到限位作用,使得固定块5 只能进行垂直移动,固定盒2的外侧开设有四个方形孔7,四个斜杆6分别与四个方形孔7活动连接,固定盒2的顶部固定安装有两个安装块25,安装块 25用来与机器安装连接。
本发明的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位或者位置关系为基于附图所示的方位或者位置关系,仅是为了便于描述本发明和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或者暗示相对重要性。
本发明的描述中,还需要说明的是,除非另有明确的规定和限制,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (7)
1.一种把控性强的机器爪,包括固定板(1),其特征在于:所述固定板(1)的顶部固定连接有固定盒(2),固定盒(2)的顶部固定安装有伺服电机(3),固定盒(2)内纵向转动安装有螺纹杆(4),伺服电机(3)的输出轴与螺纹杆(4)的顶端固定安装,螺纹杆(4)上螺纹连接有固定块(5),固定块(5)与固定盒(2)滑动连接,固定板(1)的底部开设有四个凹槽(8),四个凹槽(8)相互垂直,四个凹槽(8)内均滑动安装有滑动块(9),四个凹槽(8)的顶部内壁上均开设有活动孔,四个活动孔内均滑动安装有移动块(15),固定块(5)的外侧转动安装有四个斜杆(6)的一端,四个斜杆(6)的另一端分别与四个移动块(15)转动连接,固定块(5)向上运动通过四个斜杆(6)带动四个移动块(15)相互靠近,四个移动块(15)分别带动四个滑动块(9)相互靠近,四个滑动块(9)分别带动四个丝杠(23)转动,四个滑动块(9)分别带动四个侧面挤压板(10)相互靠近将物体的四个方位同时压紧固定,四个凹槽(8)内均转动安装有丝杠(23),滑动块(9)与对应的丝杠(23)螺纹连接,滑动块(9)的底部固定安装有侧面挤压板(10),侧面挤压板(10)上转动安装有抄底板(11),抄底板(11)上固定安装有助力板(12);所述固定板(1)上开设有四个腔体(27),四个腔体(27)内均纵向转动安装有转动杆(13),丝杠(23)的一端延伸至对应的腔体(27)内并固定安装有第一锥齿轮(18), 转动杆(13)的外侧固定安装有第二锥齿轮(19),第一锥齿轮(18)与第二锥齿轮(19)啮合,使得丝杠(23)带动对应的转动杆(13)转动,转动杆(13)带动对应的丝杆(14)向下运动,丝杆(14)通过导向块(17)推动助力板(12)翻转,助力板(12)带动对应的抄底板(11)翻转对物体进行抄底,同时四个抄底板11相互靠近实现对物体抄底抓取,转动杆(13)上螺纹连接有丝杆(14),助力板(12)的顶部开设有导向槽(16),导向槽(16)内滑动安装有导向块(17),丝杆(14)与对应的导向块(17)转动连接。
2.根据权利要求1所述的一种把控性强的机器爪,其特征在于:所述丝杠(23)的一端延伸至对应的腔体(27)内并固定安装有第一锥齿轮(18),转动杆(13)的外侧固定安装有第二锥齿轮(19),第一锥齿轮(18)与第二锥齿轮(19)啮合。
3.根据权利要求2所述的一种把控性强的机器爪,其特征在于:所述侧面挤压板(10)的一侧固定安装有挤压板(20),挤压板(20)上滑动安装有缓冲板(21),缓冲板(21)的一侧开设有缓冲槽(24),挤压板(20)与对应的缓冲槽(24)滑动连接,挤压板(20)与对应的缓冲槽(24)之间固定安装有多个缓冲簧(22)。
4.根据权利要求3所述的一种把控性强的机器爪,其特征在于:所述缓冲槽(24)的两侧内壁上均开设有限位槽,限位槽内滑动安装有限位块,限位块与对应的挤压板(20)固定连接。
5.根据权利要求1所述的一种把控性强的机器爪,其特征在于:所述固定盒(2)的顶部内壁和底部内壁之间固定安装有两个限位杆(26),固定块(5)与两个限位杆(26)滑动连接。
6.根据权利要求1所述的一种把控性强的机器爪,其特征在于:所述固定盒(2)的外侧开设有四个方形孔(7),四个斜杆(6)分别与四个方形孔(7)活动连接,固定盒(2)的顶部固定安装有两个安装块(25)。
7.根据权利要求4所述的一种把控性强的机器爪,其具体使用方法为:
(A1)、使用前,将两个安装块(25)与机器连接,将伺服电机(3)接通控制器和电源,抓取物体时,使得四个抄底板(11)和四个侧面挤压板(10)均位于物体的外侧,启动伺服电机(3),伺服电机(3)带动螺纹杆(4)转动,螺纹杆(4)带动固定块(5)向上运动,其中两个限位杆(26)对固定块(5)起到限位和导向的作用;
(A2)、固定块(5)向上运动通过四个斜杆(6)带动四个移动块(15)相互靠近,四个移动块(15)分别带动四个滑动块(9)相互靠近,四个滑动块(9)分别带动四个丝杠(23)转动,四个滑动块(9)分别带动四个侧面挤压板(10)相互靠近,四个侧面挤压板(10)通过四个缓冲板(21)与物体接触挤压,将物体的四个方位同时压紧固定;
(A3)、缓冲板(21)与物体接触时受到挤压,通过缓冲簧(22)起到缓冲的作用,可以缓解缓冲板(21)与物体刚接触时的冲击,起到缓冲保护的作用;
(A4)、丝杠(23)转动时,由于设置了第一锥齿轮(18)和第二锥齿轮(19),使得丝杠(23)带动对应的转动杆(13)转动,转动杆(13)带动对应的丝杆(14)向下运动,丝杆(14)通过导向块(17)推动助力板(12)翻转,助力板(12)带动对应的抄底板(11)翻转对物体进行抄底,同时四个抄底板(11)相互靠近,可以同时对物体进行抄底抓取,本发明采用四个侧面挤压板(10)对物体进行侧面挤压固定可以起到第一次固定抓取,采用四个抄底板(11)对物体进行抄底并相互靠近抓取,可以提高固定效果。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911301916.XA CN111055272B (zh) | 2019-12-17 | 2019-12-17 | 一种把控性强的机器爪 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911301916.XA CN111055272B (zh) | 2019-12-17 | 2019-12-17 | 一种把控性强的机器爪 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111055272A CN111055272A (zh) | 2020-04-24 |
| CN111055272B true CN111055272B (zh) | 2021-05-28 |
Family
ID=70301910
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911301916.XA Active CN111055272B (zh) | 2019-12-17 | 2019-12-17 | 一种把控性强的机器爪 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111055272B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109986499A (zh) * | 2019-04-02 | 2019-07-09 | 安徽全柴锦天机械有限公司 | 一种轴用挡圈安装专用工具 |
| CN111871837A (zh) * | 2020-08-04 | 2020-11-03 | 罗峰 | 一种数控刀具检测筛选装置 |
| CN113024921A (zh) * | 2021-02-07 | 2021-06-25 | 李春梅 | 一种epe环保包装材料的制备方法 |
| CN113084859A (zh) * | 2021-03-15 | 2021-07-09 | 湖北天珊数控焊割设备有限责任公司 | 一种用于工业机器人的夹取头结构 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012081564A (ja) * | 2010-10-13 | 2012-04-26 | Yaskawa Electric Corp | ハンド、ロボット及びロボットシステム |
| CN106584494A (zh) * | 2016-12-22 | 2017-04-26 | 六安力达生产力促进中心有限公司 | 机械手的自定心抓取机构 |
| CN108015790A (zh) * | 2017-11-16 | 2018-05-11 | 常州嘉业智能装备科技有限公司 | 极板抓取机构 |
| CN108621185A (zh) * | 2018-05-04 | 2018-10-09 | 旌德县瀚海星云智能化技术研发有限公司 | 一种具有保护功能的搬运机械手 |
| CN110181545A (zh) * | 2019-05-06 | 2019-08-30 | 江苏大学 | 一种多功能机械爪 |
-
2019
- 2019-12-17 CN CN201911301916.XA patent/CN111055272B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012081564A (ja) * | 2010-10-13 | 2012-04-26 | Yaskawa Electric Corp | ハンド、ロボット及びロボットシステム |
| CN106584494A (zh) * | 2016-12-22 | 2017-04-26 | 六安力达生产力促进中心有限公司 | 机械手的自定心抓取机构 |
| CN108015790A (zh) * | 2017-11-16 | 2018-05-11 | 常州嘉业智能装备科技有限公司 | 极板抓取机构 |
| CN108621185A (zh) * | 2018-05-04 | 2018-10-09 | 旌德县瀚海星云智能化技术研发有限公司 | 一种具有保护功能的搬运机械手 |
| CN110181545A (zh) * | 2019-05-06 | 2019-08-30 | 江苏大学 | 一种多功能机械爪 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111055272A (zh) | 2020-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111055272B (zh) | 一种把控性强的机器爪 | |
| CN105293060A (zh) | 一种稳定高效夹持移动拾取设备 | |
| CN110127358A (zh) | 机械手爪及取料机器人 | |
| CN111169981A (zh) | 一种三轴联动旋转夹爪装置及电池加工设备 | |
| CN110228706B (zh) | 一种自动调整工业机器人抓手 | |
| CN113714953B (zh) | 一种用于防爆箱柜的多工序加工装置 | |
| CN216465443U (zh) | 一种基于bim技术的用于装配式建筑施工用生产装置 | |
| CN215848284U (zh) | 一种带有智能力控的六轴抓取机械臂 | |
| CN214421709U (zh) | 一种分配阀生产设备 | |
| CN212124072U (zh) | 注塑机台架自动化机械手 | |
| CN210132157U (zh) | 蓄电池穿壁焊机 | |
| CN108288732B (zh) | 一种用于锂电池自动抓取移位的机械设备 | |
| CN220378214U (zh) | 一种液压钻机的钻杆抓取装置 | |
| CN215853590U (zh) | 一种码垛机器人夹持伸缩抓手 | |
| CN220739988U (zh) | 一种电池换触点焊接用定位器 | |
| CN219404301U (zh) | 一种旋转伸缩型工业机械手 | |
| CN219885129U (zh) | 一种具有移动调节功能的软管自动叠料装置 | |
| CN216544568U (zh) | 一种新型注塑机机械手结构 | |
| CN215395203U (zh) | 一种机械手平台的自动升降装置 | |
| CN220148553U (zh) | 一种耐火砖助力浮动夹取装置 | |
| CN219751059U (zh) | 电芯模组翻转装置 | |
| CN219777743U (zh) | 一种线路板质量检测用传动机构 | |
| CN216229470U (zh) | 一种智能制造用机器人夹取装置 | |
| CN220866529U (zh) | 轻质耐火卸砖码砖机械手设备 | |
| CN219503855U (zh) | 一种全自动摆臂式切割机的切割定位机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20230801 Address after: Room 306, Building 13, Xinggong Science and Technology Park, No. 100 Luyun Road, High tech Development Zone, Changsha City, Hunan Province, 410000 Patentee after: Hunan Xiangyue Lingtong Automation Technology Co.,Ltd. Address before: 211100 two, B unit 300, Zhihui Road, Qilin science and Technology Innovation Park, Nanjing, Jiangsu. Patentee before: NANJING YUSHENG ROBOT TECHNOLOGY Co.,Ltd. |
|
| TR01 | Transfer of patent right |