CN110753828B - 位置传感器 - Google Patents
位置传感器 Download PDFInfo
- Publication number
- CN110753828B CN110753828B CN201880038375.3A CN201880038375A CN110753828B CN 110753828 B CN110753828 B CN 110753828B CN 201880038375 A CN201880038375 A CN 201880038375A CN 110753828 B CN110753828 B CN 110753828B
- Authority
- CN
- China
- Prior art keywords
- detection
- signal
- signals
- position sensor
- magnetoresistive element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K20/00—Arrangement or mounting of change-speed gearing control devices in vehicles
- B60K20/02—Arrangement or mounting of change-speed gearing control devices in vehicles of initiating means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/023—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness for measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2312/00—Driving activities
- F16H2312/12—Parking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Control Of Transmission Device (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
Abstract
位置传感器具备:检测部(122),基于伴随着由磁性体构成的检测对象(200、202、203)的移动而从所述检测对象受到的磁场的变化,生成与沿着所述检测对象的移动方向在一个方向上排列的多个范围对应、并且相位差不同的多个检测信号;以及信号处理部(123),从所述检测部取得所述多个检测信号,将所述多个检测信号与阈值进行比较,基于所述多个检测信号与所述阈值的大小关系的组合,将所述检测对象的位置确定为所述多个范围中的某一范围的位置。
Description
相关申请的相互参照
本申请基于2017年6月14日申请的日本专利申请第2017-117170号,在此援引其记载内容。
技术领域
本公开涉及输出与检测对象的位置对应的信号的位置传感器。
背景技术
以往,例如在专利文献1中提出了一种具备永磁体、磁场传感器以及评价电路的线性位置传感器。在该传感器中,永磁体以及磁场传感器能够沿着移动路径相对于彼此而移动。另外,磁场传感器生成由磁场的方向决定的输出信号。评价电路将磁场传感器的输出信号转换为与所测定的路径成正比的信号。
现有技术文献
专利文献
专利文献1:日本特开2006-153879号公报
发明内容
然而,在上述相关的技术中,由于检测对象为磁体本身或搭载有磁体,所以需要检测对象的追加工序、磁体的组装。因此,加工数、组装工时、部件数量增加,成为检测位置误差的原因。另外,也会产生因接口部处的信号偏移、A/D转换误差包含在正比例的信号中而导致的检测位置误差。
本公开目的在于,提供一种能够抑制检测位置误差的产生的位置传感器。
本公开的一方式的位置传感器具备检测部,该检测部伴随着由磁性体构成的检测对象的移动,基于从检测对象受到的磁场的变化,生成与沿着检测对象的移动方向在一个方向上排列的多个范围对应、并且相位差不同的多个检测信号。
另外,位置传感器具备信号处理部,该信号处理部从检测部取得多个检测信号,将多个检测信号与阈值进行比较,基于多个检测信号与阈值的大小关系的组合,将检测对象的位置确定为多个范围中的某一范围的位置。
由此,检测部从检测对象受到磁场的影响而对位置进行检测,所以检测对象并不需要必须具备磁体。因此,加工数、组装工时、部件数量不会增加,不会产生由磁体引起的检测位置误差。另外,由于信号处理部检测出检测对象的多个范围中的某一范围的位置,因此也不会产生因信号偏移、A/D转换误差包含在信号内而导致的检测位置误差。因而,能够抑制检测位置误差的产生。
附图说明
关于本公开的上述目的及其他目的、特征、优点,通过参照附图和下述的详细的描述而更加明确。其附图为:
图1是本公开的第一实施方式的位置传感器的外观图,
图2是构成使用了磁阻元件的磁检测方式的部件的分解立体图,
图3是图2所示的各部件的俯视图,
图4是图3的IV-IV剖面图,
图5是用于说明基于磁阻元件的检测信号的图,
图6是表示构成使用了霍尔元件的磁检测方式的部件的俯视图,
图7是图6的VII-VII剖面图,
图8是用于说明基于霍尔元件的检测信号的图,
图9是表示位置传感器的电路结构的图,
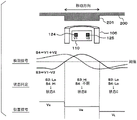
图10是表示对三个状态进行检测的情况下的检测信号、状态判定、位置信号的图,
图11是表示作为变形例,判定四个状态的情况的图,
图12是表示作为变形例,根据两个元件对的输出生成的输出生成检测信号的情况的图,
图13是表示作为变形例,根据三个元件对的输出生成的输出生成检测信号的情况的图,
图14是表示作为变形例,根据五个元件对的输出生成的输出生成检测信号的情况的图,
图15是表示作为变形例,根据四个元件对的输出,生成三个检测信号并判定五个状态的情况的图,
图16是表示作为变形例,根据三个元件对的输出,生成三个检测信号并判定六个状态的情况的图,
图17是表示作为变形例,根据四个元件对的输出,生成四个检测信号并判定七个状态的情况的图,
图18是表示作为变形例,根据五个元件对的输出,生成四个检测信号并判定八个状态的情况的图,
图19是表示作为变形例,使用两个阈值来判定七个状态的情况的图,
图20是表示作为变形例,根据三个霍尔元件的输出判定三个状态的情况的图,
图21是表示轴的变形例的图,
图22是表示检测对象的一个例子的图,
图23是表示检测对象的一个例子的图,
图24是表示第二实施方式的轴的图,
图25是表示对图24所示的轴检测三个状态的情况下的检测信号、状态判定、位置信号的图,
图26是表示作为变形例,判定四个状态的情况的图,
图27是表示检测对象的一个例子的图,
图28是表示检测对象的一个例子的图,
图29是表示在第三实施方式中,判定三个状态的情况下的离散的脉冲宽度的图。
具体实施方式
以下,基于附图对本公开的实施方式进行说明。另外,在以下的各实施方式彼此中,对相互相同或等价的部分,在图中标注相同的附图标记。
(第一实施方式)
以下,参照附图对本公开的第一实施方式进行说明。本实施方式的位置传感器是对检测对象的位置处于哪个范围(状态)进行检测、并输出与该范围对应的信号的传感器。
如图1所示,位置传感器100将与车辆的档位(Shift position)的动作连动的轴200的位置作为检测对象进行检测。具体而言,位置传感器100通过检测与设置于轴200的突起部201的位置对应的信号,来取得轴200的状态。
轴200的状态是指,档位被用户操作时的轴200的位置。例如,轴200与档位的驻车档连动地移动。如图1所示,在以使档位位于驻车档的方式进行了操作的情况下,轴200沿轴向移动。由此,轴200反映驻车档的状态。位置传感器100对轴200中的比突起部201更靠近前侧的位置进行检测。
另一方面,在以使档位位于驻车档以外的位置的方式进行了操作的情况下,轴200反映驻车档以外的状态。在该情况下,位置传感器100对轴200中的突起部201、比突起部201更靠进深侧的位置进行检测。当然,轴200也可以与驻车档以外的位置连动地移动。
轴200例如整体由磁性体材料形成。另外,也可以是,轴200的突起部201中的与位置传感器100对置的面由磁性体材料形成,其他部分由其它金属材料形成。
位置传感器100具备通过对PPS等树脂材料进行树脂成型而形成的壳体101。壳体101具有轴200侧的前端部102、固定于周边机构的凸缘部103、供线束连接的连接器部104。在前端部102的内部设置有传感检测部分。
另外,位置传感器100以前端部102相对于轴200的突起部201具有规定的间隙的方式,经由凸缘部103固定于周边机构。因而,轴200相对于位置传感器100移动。
另外,虽未图示,但位置传感器100也可以以检测与轴200连动地动作的阀的位置的方式固定于周边机构。另外,轴200的移动方向并不限定于直行、往复,也可以是旋转、在特定的角度内的往复等。如此,位置传感器100能够应用于与车辆的档位的动作连动地移动的可动部件的位置或移动、旋转等的状态检测。
位置传感器100能够采用使用了磁阻元件的磁检测方式、或使用了霍尔元件的磁检测方式。在使用了磁阻元件的磁检测方式的情况下,如图2所示,位置传感器100具备模制IC部105、磁体106、以及保持部107。它们收容于壳体101的前端部102。模制IC部105插入中空筒状的磁体106。磁体106插入有底筒状的保持部107。
如图3的平面示意图以及图4的剖面示意图所示,模制IC部105、磁体106、以及保持部107被一体化。模制IC部105的主要部分位于磁体106的中空部。保持部107固定模制IC部105以及磁体106的位置。
模制IC部105具有引线框108、处理电路芯片109、传感器芯片110、以及模制树脂部111。引线框108具有板状的岛部112以及多个引线113~115。岛部112以平面部相对于检测对象的移动方向成为垂直的方式配置。
多个引线113~115与被施加电源电压的电源端子113、被施加接地电压的接地端子114、用于输出信号的输出端子115对应。即,各引线113~115为电源用、接地用以及信号用这三根。在各引线113~115的前端分别连接有端子116。端子116位于壳体101的连接器部104。另外,端子116连接于线束。
另外,在本实施方式中,多个引线113~115中的接地用的引线114与岛部112一体化。岛部112也可以与全部的引线113~115完全分离。
处理电路芯片109以及传感器芯片110通过粘合剂等安装于岛部112。处理电路芯片109构成有对传感器芯片110的信号进行处理的电路部。传感器芯片110包括在从外部受到了磁场的影响时电阻值发生变化的磁阻元件。磁阻元件例如为AMR、GMR、TMR。各引线113~115与处理电路芯片109经由线117而电连接。处理电路芯片109与传感器芯片110经由线118而电连接。
模制树脂部111将岛部112、各引线113~115的一部分、处理电路芯片109、以及传感器芯片110密封。模制树脂部111成型为固定于磁体106的中空部的形状。
对基于使用了磁阻元件的磁检测方式的检测信号进行说明。如图5所示,保持部107以相对于作为检测对象的突起部201具有规定的间隙的方式配置。而且,当突起部201相对于保持部107移动时,在突起部201的移动方向的中心检测信号成为最大。若间隙变大则检测信号的振幅变小,若间隙变小则检测信号的振幅变大。通过对这样的检测信号设定阈值,能够检测突起部201的位置。
另外,在图5中,仅示出了突起部201的移动与基于磁检测元件的检测信号的关系。之后会进行叙述,检测信号根据多个磁阻元件的输出而生成。
在采用使用了霍尔元件的磁检测方式的情况下,如图6的平面示意图以及图7的剖面示意图所示,模制IC部105插入并固定于保持部107。另外,模制IC部105具有引线框108、IC芯片119、磁体120、以及模制树脂部111。
引线框108的岛部112以平面部相对于检测对象的移动方向成为平行的方式配置。另一方面,各引线113~115以相对于检测对象的移动方向成为垂直的方式配置。接地用的引线114与岛部112直角地一体化。在各引线113~115的前端分别连接有端子116。
在IC芯片119形成有多个霍尔元件与信号处理电路部。即,在使用了霍尔元件的磁检测方式中,成为单芯片结构。磁体120固定于岛部112中的与IC芯片119相反的一侧的面。各引线113~115与IC芯片119经由线121而电连接。模制树脂部111成型为固定于保持部107的中空部的形状。
对基于使用了霍尔元件的磁检测方式的检测信号进行说明。如图8所示,例如在两个霍尔元件(X、Y)配置于磁体120的上方的情况下,当突起部201相对于保持部107移动时,对应于各霍尔元件(X、Y)的位置,各检测信号成为最大。间隙与检测信号的振幅的关系与使用了磁阻元件的磁检测方式相同。通过对各检测信号设定阈值,能够检测突起部201的位置。
在本实施方式中,采用上述的磁检测方式中的使用了磁阻元件的方式。检测磁矢量的磁阻元件具有能够消除因间隙的偏移而导致的精度误差的优点。另外,具有能够减少或消除在传感器芯片110上产生的应力的影响的优点。由此,能够进行高精度的检测。
接下来,对传感器芯片110以及处理电路芯片109中所构成的电路结构进行说明。如图9所示,位置传感器100与控制器300经由线束400而电连接。如上述那样,由于模制IC部105具有三根引线113~115,因此线束400包括三根布线。
控制器300例如是变速器控制器(TCU)。控制器300具备电源部301、控制部302、以及接地部303。电源部301是向位置传感器100供给电源电压的电路部。控制部302是根据从位置传感器100输入的输出信号来进行预先决定的控制的电路部。接地部303是设定位置传感器100的接地电压的电路部。另外,控制器300也可以构成为电子控制装置(ECU)。
位置传感器100具备检测部122以及信号处理部123。检测部122设置于传感器芯片110。信号处理部123设置于处理电路芯片109。检测部122以及信号处理部123基于从控制器300供给的电源电压以及接地电压而动作。
检测部122基于伴随着轴200的移动而从轴200受到的磁场的变化,生成与沿着轴200的移动方向的多个范围对应、并且相位差不同的多个检测信号。沿着轴200的移动方向的多个范围并不是多个范围沿着轴200的移动方向并列地排列,而是多个范围沿着轴200的移动方向在一个方向上直列地排列。
如图10所示,检测部122具有伴随着突起部201的移动而电阻值变化的第一磁阻元件对124、第二磁阻元件对125、以及第三磁阻元件对126这三个元件对。
在突起部201的移动方向上,三个元件对分别以第二磁阻元件对125位于第一磁阻元件对124与第三磁阻元件对126之间的方式配置。即,第二磁阻元件对125以被第一磁阻元件对124与第三磁阻元件对126夹着的方式配置。而且,对第二磁阻元件对125施加沿着磁体106的中心轴的偏置磁场。另一方面,对第一磁阻元件对124以及第三磁阻元件对126施加卷入磁体106的端部的偏置磁场。
各磁阻元件对124~126构成为在电源与接地之间串联连接有两个磁阻元件的半桥电路。各磁阻元件对124~126检测伴随着突起部201的移动而两个磁阻元件受到了磁场的影响时的电阻值的变化。另外,各磁阻元件对124~126基于该电阻值的变化,将两个磁阻元件的中点的电压作为波形信号而分别输出。另外,在各磁阻元件对124~126由电流源驱动的构成中,各磁阻元件对124~126的两端电压为波形信号。
另外,检测部122除了各磁阻元件对124~126之外,还具备未图示的第一~第四运算放大器。若将第一磁阻元件对124的中点的中点电位定义为V1,并且将第二磁阻元件对125的中点的中点电位定义为V2,则第一运算放大器为以运算V1-V2并将其结果作为R1而输出的方式构成的差动放大器。另外,若将第三磁阻元件对126的中点的中点电位定义为V3,则第二运算放大器为以运算V2-V3并将其结果作为R2而输出的方式构成的差动放大器。
第三运算放大器为以如下方式构成的差动放大器:从第一磁阻元件对124的中点输入中点电位V1,并且从第三磁阻元件对126的中点输入中点电位V3,运算V1-V3并将其结果作为S1而输出。例如,信号S1为在轴200的突起部201的移动方向中心处振幅成为最大、在从突起部201离开的位置处振幅成为最小的波形的信号。
第四运算放大器为以如下方式构成的差动放大器:从第一运算放大器输入R1(=V1-V2),并且从第二运算放大器输入R2(=V2-V3),运算R2-R1并将其结果作为S2(=(V2-V3)-(V1-V2))而输出。该S2的信号是与轴200的突起部201的凹凸构造对应的波形的信号。例如,信号S2为在轴200的突起部201的从凹切换为凸的一侧的边缘部分振幅成为最大、在从凸切换为凹的另一侧的边缘部分振幅成为最小的波形的信号。该信号S2是相对于信号S1具有相位差的波形的信号。
如此,检测部122构成为,根据各磁阻元件对124~126的输出,生成并取得信号S1(=V1-V3)以及信号S2(=(V2-V3)-(V1-V2))。检测部122将信号S1以及信号S2作为检测信号而输出至信号处理部123。
图9的信号处理部123从检测部122取得各检测信号,将各检测信号与阈值进行比较,基于各检测信号与阈值的大小关系的组合,将轴200的位置确定为轴200中的多个范围中的某一范围的位置。另外,信号处理部123将轴200的位置输出至控制器300。信号处理部123具有处理部127以及输出电路部128。
处理部127从检测部122输入各检测信号,并基于各检测信号来确定突起部201的位置。为此,处理部127对各检测信号具有共用的阈值。
并且,处理部127将作为检测信号的信号S1、S2与阈值进行比较。处理部127将信号S1、S2比阈值大的情况判定为Hi,将信号S1、S2比阈值小的情况判定为Lo。另外,处理部127根据信号S1、S2的Hi/Lo的组合,来判定检测部122检测出了轴200的哪个范围。
具体而言,如图10所示,在信号S1为Lo、信号S2为Hi的情况下,检测部122检测出了轴200中的比突起部201靠附图左侧的范围。即,处理部127确定了轴200的位置。将确定了该范围的位置的情况下的轴200的状态设为“状态A”。
同样,在信号S1为Hi的情况下,检测部122检测出了轴200中的突起部201的范围。在该情况下,信号S2的Hi/Lo不限。因而,将确定了该范围的位置的情况下的轴200的状态设为“状态B”。
而且,在信号S1为Lo、信号S2为Lo的情况下,检测部122检测出了轴200中的比突起部201靠附图右侧的范围。将确定了该范围的位置的情况下的轴200的状态设为“状态C”。如此,处理部127将轴200的位置确定为沿着轴200的移动方向的多个范围中的某一范围的位置。
输出电路部128是基于处理部127的判定结果将表示上述的状态A~C中的某个状态的位置信号输出至控制器300的电路部。首先,输出电路部128从处理部127取得基于检测信号判定出的状态A~C的信息。然后,输出电路部128将对多个范围分别设定的离散值中的与已确定的位置的范围对应的值的位置信号输出至控制器300。
在本实施方式中,离散值的位置信号是电压值不同的电压信号。例如,如状态A为VH、状态B为VM、状态C为VL那样,以表示各状态A~C的电压值在各状态A~C中不重复的方式设定为离散值。电压值的大小关系为VH>VM>VL。由于只要离散值在各状态A~C中不重复即可,因此离散值也可以被设定为规定的电压范围内的某电压值。规定的电压范围例如可以如1V以内那样在各状态A~C中相同,也可以如在状态A下为1V以内、但在状态B下为2V以内那样不同。
如图10所示,在突起部201沿着轴200的移动方向进行了移动的情况下,位置信号成为阶梯状的离散的电压值。另外,存在位置信号的电压值因噪声而瞬间地上下从而达到表示其他状态的电压值的情况。但是,控制器300的控制部302通过读取规定时间的电压值,能够基本消除噪声的影响。即,位置传感器100能够输出耐噪声性能高的位置信号。以上是本实施方式的位置传感器100的构成。
控制器300的控制部302从位置传感器100输入位置信号,并用于希望的控制。例如,车辆的仪表部的驻车灯的点亮熄灭控制、根据档位是否进入驻车档来许可或不许可其他控制的控制、在位置传感器100故障的情况下不使用位置传感器100的控制、故障灯的点亮控制等。
另外,控制部302还存在输入位置信号以外的信号的情况。该信号是作为位置传感器100的输出原本不可能产生的信号。在该情况下,考虑位置传感器100以外的故障为原因。例如,线束400等通信装置的故障等。因而,控制器300能够检测通信装置的故障。
作为变形例,如图11所示,能够根据检测信号来判定四个状态。将信号S1为Lo、信号S2为Hi的情况设为“状态A”,将信号S1为Hi、信号S2为Hi的情况设为“状态B”,将信号S1为Hi、信号S2为Lo的情况设为“状态C”,将信号S1为Lo、信号S2为Lo的情况设为“状态D”。在该情况下,只要如图11所示那样将四个状态设定为四个离散的电压值(VH>VM1>VM2>VL)即可。
作为变形例,如图12所示,能够根据第一磁阻元件对124以及第二磁阻元件对125这两个元件对来判定三个状态。在该情况下,处理部127根据各磁阻元件对124、125的输出,生成并取得信号S3(=V1-V2)以及信号S4(=V1+V2)。通过这样的运算处理,也能够取得相位差不同的两个检测信号。
由此,处理部127将信号S3为Lo、信号S4为Hi的情况判定为“状态A”,将信号S3为Hi的情况判定为“状态B”,将信号S3为Lo、信号S4为Lo的情况判定为“状态C”。在该情况下,与上述相同,将三个状态作为三个离散的电压值(VH、VM、VL)而输出。
作为变形例,如图13所示,处理部127根据三个磁阻元件对124~126的输出,生成并取得信号S5(=V1-V3)以及信号S6(=V2)。如此,能够根据第一磁阻元件对124以及第二磁阻元件对125这两个元件对来判定三个状态。该变形例中的状态判定与图12相同。
作为变形例,如图14所示,检测部122具有第一磁阻元件对124、第二磁阻元件对125、第三磁阻元件对126、第四磁阻元件对129、第五磁阻元件对130这五个元件对。各磁阻元件对124~126、129、130分别输出中点电位V1~V5。
在该情况下,处理部127根据各磁阻元件对124~126、129、130的输出,生成并取得信号S7(=V4-V5)以及信号S8(=2V2-V1-V3)。能够根据这些信号S7、S8与图12的例子同样地判定三个状态。
作为变形例,如图15所示,检测部122具有四个磁阻元件对124~126、129。在该情况下,处理部127根据四个元件对的输出,生成并取得三个信号S9(=V1-V4)、信号S10(=2V2-V1-V3)以及信号S11(=2V3-V2-V4)。如此,可根据四个元件对的输出来获得相位差不同的三个检测信号。
然后,处理部127将信号S9为Lo、信号S10为Hi、信号S11为Hi的情况判定为“状态A”,将信号S9为Hi、信号S10iHi、信号S11为Hi的情况判定为“状态B”。另外,处理部127将信号S9为Hi、信号S10为Lo、信号S11为Hi的情况判定为“状态C”,将信号S9为Hi、信号S10为Lo、信号S11为Lo的情况判定为“状态D”。而且,处理部127将信号S9为Lo、信号S10为Lo、信号S11为Lo的情况判定为“状态E”。在该情况下,也与上述相同,将五个状态作为五个离散的电压值而输出。
作为变形例,如图16所示,检测部122具有三个磁阻元件对124~126。另外,处理部127根据三个元件对的输出,生成并取得三个信号S12(=V1-V2)、信号S13(=V2-V3)以及信号S14(=2V2-V1-V3)。如此,可根据三个元件对的输出来获得相位差不同的三个检测信号。
然后,处理部127与上述的变形例相同,通过三个信号S12、信号S13、以及信号S14的Hi/Lo的组合来判定状态A~F这六个状态。在该情况下,也与上述相同,将六个状态作为六个离散的电压值而输出。
作为变形例,如图17所示,检测部122具有四个磁阻元件对124~126、129。另外,处理部127根据四个元件对的输出,生成并取得四个信号S15(=V1-V4)、信号S16(=V2-V3)、信号S17(=2V2-V1-V3)以及信号S18(=2V3-V2-V4)。如此,可根据四个元件对的输出来获得相位差不同的四个检测信号。
然后,处理部127与上述的变形例相同,通过四个信号S15、信号S16、信号S17、以及信号S18的Hi/Lo的组合来判定状态A~G这七个状态。在该情况下,也与上述相同,将七个状态作为七个离散的电压值而输出。
作为变形例,如图18所示,检测部122具有五个磁阻元件对124~126、129、130。另外,处理部127根据五个元件对的输出,生成并取得四个信号S19(=V1-V3)、信号S20(=V3-V5)、信号S21(=V2-V4)以及信号S22(=2V3-V1-V5)。如此,可根据五个元件对的输出来获得相位差不同的四个检测信号。
然后,处理部127与上述的变形例相同,通过四个信号S19、信号S20、信号S21、以及信号S22的Hi/Lo的组合来判定状态A~H这八个状态。在该情况下,也与上述相同,将八个状态作为八个离散的电压值而输出。
作为变形例,如图19所示,检测部122具有三个磁阻元件对124~126。另外,处理部127根据三个元件对的输出,生成并取得两个信号S23(=V1-V3)以及信号S24(=2V2-V1-V3)。如此,可根据三个元件对的输出来获得相位差不同的两个检测信号。
另外,处理部127具有第一阈值以及第二阈值。第二阈值是比第一阈值小的值。而且,处理部127将各信号S23、S24与各阈值进行比较。在该情况下,处理部127将信号比第一阈值大的情况判定为Hi,将信号为第一阈值与第二阈值之间的情况判定为Mid,将信号比第二阈值小的情况判定为Lo。
因而,处理部127将信号S23为Lo、信号S24为Hi的情况判定为“状态A”,将信号S23为Mid、信号S24为Hi的情况判定为“状态B”,将信号S23为Hi、信号S24为Hi的情况判定为“状态C”。另外,处理部127将信号S23为Hi、信号S24为Mid的情况判定为“状态D”,将信号S23为Hi、信号S24为Lo的情况判定为“状态E”。而且,处理部127将信号S23为Mid、信号S24为Lo的情况判定为“状态F”,将信号S23为Lo、信号S24为Lo的情况判定为“状态G”。
如此,通过使用多个阈值也能够变更能够判定的状态数。当然,阈值并不限定于两个,也可以设置三个以上。在该变形例中也与上述相同,将七个状态作为七个离散的电压值而输出。
作为变形例,如图20所示,检测部122也可以构成为,通过配置于磁体120上的三个霍尔元件131~133来检测伴随着轴200的移动而发生的磁场的变化。在该情况下,处理部127根据三个霍尔元件131~133的各输出,生成并取得两个信号S25(=V2)以及信号S26(=V1-V3)。如此,也能够根据三个霍尔元件131~133的各输出来获得相位差不同的两个检测信号。
在该情况下,处理部127与上述的变形例相同,通过两个信号S25以及信号S26的Hi/Lo的组合来判定状态A~C这三个状态。在该情况下,也与上述相同,将三个状态作为三个离散的电压值而输出。
作为变形例,如图21所示,轴200也可以形成为圆柱插入四边形的块中那样的形状。另外,如图22所示,检测对象也可以不是轴200,而是在四边形的板的平面部设置有四边形的块的板部件202。而且,如图23所示,检测对象也可以是在扇形的板的平面部设置有四边形的块的扇部件203。
即,检测对象只要以如下方式形成即可:在第一移动部与第二移动部之间设置有基准部,并且从第一移动部向基准部过渡时以及从第二移动部向基准部过渡时的构造变化相同。在图21~图23所示的例子中,基准部相对于第一移动部以及第二移动部突出。另外,从第一移动部向基准部的过渡以及从第二移动部向基准部的过渡,与从凹状态向凸状态的过渡对应。如此,检测对象只要成为将检测范围分割为多个范围的形状即可。
如以上说明那样,在本实施方式中,位置传感器100的特征在于,确定作为检测对象的轴200的多个范围中的某一范围,并输出与所确定的范围的位置对应的位置信号。在该构成中,由于检测部122从轴200受到磁场的影响而对位置进行检测,因此在轴200的突起部201不需要必须设置作为检测对象的磁体。因此,检测对象的加工数、组装工时、部件数量不会增加,不会产生由检测对象的磁体引起的检测位置误差。
另外,信号处理部123成为将检测对象即突起部201的位置作为轴200的状态来检测的构成。因此,不会产生因位置信号的信号偏移、A/D转换误差包含在位置信号内而导致的检测位置误差。因而,能够抑制检测位置误差的产生。
而且,信号处理部123成为将各状态以离散的电压值输出的构成。因此,由于能够在控制器300侧设置读取余量,所以即使在噪声重叠时也不会对各状态误判定,耐噪声性能高。如此,还能够减少由噪声引起的检测位置误差,能够提高相对于检测位置误差的鲁棒性。因而,能够确保位置传感器100的输出的精度。
另外,轴200、板部件202、扇部件203与检测对象对应,控制器300与外部装置对应。
(第二实施方式)
在本实施方式中,对与第一实施方式不同的部分进行说明。如图24所示,轴200具有一部分沿径向凹陷的凹部204。在该情况下,处理部127能够根据各磁阻元件对124~126的各检测信号,生成信号S1以及信号S2并判定三个状态。
在该情况下,如图25所示那样,信号S27(=V1-V3)为在轴200的凹部204的移动方向中心处振幅成为最小、在从凹部204离开的位置处振幅成为最大的波形的信号。另一方面,信号S28(=2V2-V1-V3)为在轴200的凹部204的从凸切换为凹的一侧的边缘部分振幅成为最小、在从凹切换为凸的另一侧的边缘部分振幅成为最大的波形的信号。即,例如,相对于图10所示例子信号反转。
而且,处理部127与第一实施方式相同,通过两个信号S27以及信号S28的Hi/Lo的组合来判定状态A~C这三个状态。在该情况下,也与上述相同,处理部127将三个状态作为三个离散的电压值而输出。
作为变形例,如图26所示,也可以通过两个信号S27以及信号S28的Hi/Lo的组合来判定状态A~D这四个状态。在该情况下,也与上述相同,将四个状态作为四个离散的电压值而输出。另外,也可以与第一实施方式相同,使信号的数量变化、或使判定的状态的数量变化。
作为变形例,如图27所示,检测对象也可以是在板部件202设置有窗部205的部件。另外,如图28所示,检测对象也可以是在扇部件203设置有窗部205的部件。在图24、图27、图28所示的例子中,基准部相对于第一移动部以及第二移动部凹陷。另外,从第一移动部向基准部的过渡以及从第二移动部向基准部的过渡,与从凸状态向凹状态的过渡对应。如此,检测对象只要成为将检测范围分割为多个范围的形状即可。
(第三实施方式)
在本实施方式中,对与第一、第二实施方式不同的部分进行说明。在本实施方式中,输出电路部128将脉冲宽度不同的脉冲信号作为离散值的信号输出至控制器300。即,离散值的信号是PWM方式的信号。离散值是脉冲宽度的值、信号的周期、占空比等。
如图29所示,例如,设定为与状态A对应的信号的脉冲宽度最小、与状态C对应的信号的脉冲宽度最大。与状态B对应的信号的脉冲宽度被设定在与状态A、C对应的信号的脉冲宽度之间。能够与第一实施方式同样地提高相对于噪声的耐性。
(其他实施方式)
上述各实施方式所示的位置传感器100的构成为一个例子,并不限定于上述所示的构成,也能够采用可以实现本公开的其他构成。例如,位置传感器100的用途并不限定于车辆用,也能够作为检测可动部件的位置的装置而广泛应用于工业用机器人、制造设备等。
本公开是遵照实施例而描述的,但可理解为本公开并不限定于该实施例及构造。本公开还包括各种变形例及等价范围内的变形。此外,各种组合及方式、进而在它们中仅包含一个要素、一个要素以上、或一个要素以下的其他组合及方式也落入本公开的范畴、思想范围内。
Claims (7)
1.一种位置传感器,其特征在于,具备:
检测部(122),基于伴随着由磁性体构成的检测对象(200、202、203)的移动而从所述检测对象受到的磁场的变化,生成与沿着所述检测对象的移动方向在一个方向上排列的多个范围对应、并且相位差不同的多个检测信号;以及
信号处理部(123),从所述检测部取得所述多个检测信号,将所述多个检测信号与阈值进行比较,基于所述多个检测信号与所述阈值的大小关系的组合,将所述检测对象的位置确定为所述多个范围中的某一范围的位置,
所述检测部具有多个磁阻元件对(124~126、129、130),该多个磁阻元件对(124~126、129、130)构成为半桥电路并且相互离开地配置,通过组合所述多个磁阻元件对的输出,作为全桥电路的输出而生成所述多个检测信号,
所述信号处理部将对所述多个范围分别设定的离散值中的、与由所述信号处理部确定的所述检测对象的位置的范围对应的值的位置信号输出至外部装置(300)。
2.如权利要求1所述的位置传感器,其中,
所述多个范围是沿着所述检测对象的移动方向在一个方向上排列的多个检测区域。
3.如权利要求1所述的位置传感器,其中,
所述离散值的位置信号是电压值不同的电压信号。
4.如权利要求1所述的位置传感器,其中,
所述离散值的位置信号是脉冲宽度不同的脉冲信号。
5.如权利要求1所述的位置传感器,其中,
所述多个磁阻元件对(124~126、129、130)伴随着所述检测对象的移动而电阻值发生变化。
6.如权利要求5所述的位置传感器,其中,
所述检测部基于所述多个磁阻元件对的输出,生成所述多个检测信号。
7.如权利要求1至6中的任一项所述的位置传感器,其中,
所述检测对象是与车辆的档位的动作连动地移动的可动部件。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210409607.XA CN114754802A (zh) | 2017-06-14 | 2018-05-17 | 位置传感器 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017117170A JP6787260B2 (ja) | 2017-06-14 | 2017-06-14 | ポジションセンサ |
| JP2017-117170 | 2017-06-14 | ||
| PCT/JP2018/019059 WO2018230242A1 (ja) | 2017-06-14 | 2018-05-17 | ポジションセンサ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210409607.XA Division CN114754802A (zh) | 2017-06-14 | 2018-05-17 | 位置传感器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110753828A CN110753828A (zh) | 2020-02-04 |
| CN110753828B true CN110753828B (zh) | 2022-06-14 |
Family
ID=64660466
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210409607.XA Pending CN114754802A (zh) | 2017-06-14 | 2018-05-17 | 位置传感器 |
| CN201880038375.3A Active CN110753828B (zh) | 2017-06-14 | 2018-05-17 | 位置传感器 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210409607.XA Pending CN114754802A (zh) | 2017-06-14 | 2018-05-17 | 位置传感器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200072593A1 (zh) |
| JP (1) | JP6787260B2 (zh) |
| CN (2) | CN114754802A (zh) |
| DE (1) | DE112018003016T5 (zh) |
| WO (1) | WO2018230242A1 (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019002469A (ja) | 2017-06-14 | 2019-01-10 | 株式会社デンソー | ポジションセンサ |
| JP6743770B2 (ja) | 2017-06-16 | 2020-08-19 | 株式会社デンソー | ポジションセンサ |
| JP6791033B2 (ja) | 2017-06-16 | 2020-11-25 | 株式会社デンソー | ポジションセンサ |
| WO2021242077A1 (ko) * | 2020-05-29 | 2021-12-02 | 주식회사 루플 | 조명 장치 및 그 제어 방법 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003287438A (ja) * | 2002-03-28 | 2003-10-10 | Denso Corp | センサ装置 |
| CN1590954A (zh) * | 2003-08-29 | 2005-03-09 | 株式会社电装 | 带有故障检测器的角位置确定设备 |
| CN101136395A (zh) * | 2006-08-30 | 2008-03-05 | 株式会社电装 | 包括两片带有多个电子元件的衬底的功率电子封装件 |
| JP2010060491A (ja) * | 2008-09-05 | 2010-03-18 | Tokai Rika Co Ltd | 操作位置判定装置 |
| JP2015075362A (ja) * | 2013-10-07 | 2015-04-20 | 大同特殊鋼株式会社 | 単位素子対及び薄膜磁気センサ |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS576962Y2 (zh) * | 1974-07-26 | 1982-02-09 | ||
| JP3014659B2 (ja) * | 1997-01-14 | 2000-02-28 | キヤノン電子株式会社 | タイヤ回転検知信号処理方法及びタイヤ回転検知装置 |
| JP3814942B2 (ja) * | 1997-05-30 | 2006-08-30 | アイシン精機株式会社 | ポジションセンサ |
| US6674280B1 (en) * | 1999-12-31 | 2004-01-06 | Honeywell International Inc. | Position detection apparatus with distributed bridge sensor |
| JP2001304395A (ja) * | 2000-04-27 | 2001-10-31 | Honda Motor Co Ltd | 自動変速機の制御装置 |
| JP2003014494A (ja) * | 2001-06-29 | 2003-01-15 | Matsushita Electric Works Ltd | ポジションセンサ |
| US7243557B2 (en) * | 2003-12-30 | 2007-07-17 | Nctengineering Gmbh | Torque sensor |
| JP2007333490A (ja) * | 2006-06-13 | 2007-12-27 | Tokai Rika Co Ltd | 磁気式位置検出装置 |
| JP2008101932A (ja) * | 2006-10-17 | 2008-05-01 | Tokai Rika Co Ltd | 磁気式位置検出装置 |
| JP4245627B2 (ja) * | 2006-11-02 | 2009-03-25 | トヨタ自動車株式会社 | シフト切換機構の制御装置および制御方法 |
| JP2009014408A (ja) * | 2007-07-02 | 2009-01-22 | Tokai Rika Co Ltd | 位置検出装置 |
| JP2009014454A (ja) * | 2007-07-03 | 2009-01-22 | Tokai Rika Co Ltd | 位置検出装置 |
| JP5013187B2 (ja) * | 2007-07-31 | 2012-08-29 | アイシン精機株式会社 | シフトレバーのポジションセンサ |
| JP5166068B2 (ja) * | 2008-02-26 | 2013-03-21 | 株式会社東海理化電機製作所 | 位置検出装置及びシフトレバー装置 |
| KR20120005452A (ko) * | 2009-04-06 | 2012-01-16 | 더 팀켄 컴퍼니 | 센서 어셈블리 |
| JP2011163783A (ja) * | 2010-02-04 | 2011-08-25 | Tokai Rika Co Ltd | 操作位置検出装置 |
| JP2011221793A (ja) * | 2010-04-09 | 2011-11-04 | Tokai Rika Co Ltd | 位置検出装置及びシフトレバー装置 |
| JP5725366B2 (ja) * | 2011-12-02 | 2015-05-27 | 株式会社デンソー | 回転検出装置 |
| US9046383B2 (en) * | 2012-01-09 | 2015-06-02 | Allegro Microsystems, Llc | Systems and methods that use magnetic field sensors to identify positions of a gear shift lever |
| US8818655B1 (en) * | 2013-03-07 | 2014-08-26 | GM Global Technology Operations LLC | Split electronic transmission range selection systems and methods |
| JP6347582B2 (ja) * | 2013-07-19 | 2018-06-27 | キヤノン株式会社 | 回転検出装置、モータ制御装置、モータ被駆動装置、回転検出装置の補正方法および補正プログラム |
| JP6049570B2 (ja) * | 2013-08-27 | 2016-12-21 | アルプス電気株式会社 | 回転検出装置 |
| JP6245052B2 (ja) * | 2014-04-23 | 2017-12-13 | 株式会社デンソー | 回転検出装置 |
| EP2960666B1 (en) * | 2014-06-25 | 2017-01-25 | Nxp B.V. | Sensor system with a three half-bridge configuration |
| JP6657584B2 (ja) * | 2015-03-31 | 2020-03-04 | 株式会社ジェイテクト | 回転検出装置、回転角検出装置および電動パワーステアリング装置 |
| JP6337842B2 (ja) * | 2015-06-22 | 2018-06-06 | 株式会社デンソー | 回転検出装置 |
| JP6578817B2 (ja) * | 2015-08-25 | 2019-09-25 | 富士電機株式会社 | 信号処理装置及び放射線測定装置 |
| DK3430713T3 (da) * | 2016-03-13 | 2022-04-25 | Servosense Smc Ltd | Positionskoder |
| US10281028B2 (en) * | 2016-05-26 | 2019-05-07 | Dura Operating, Llc | Shifter location system for a motor vehicle |
-
2017
- 2017-06-14 JP JP2017117170A patent/JP6787260B2/ja active Active
-
2018
- 2018-05-17 DE DE112018003016.4T patent/DE112018003016T5/de not_active Ceased
- 2018-05-17 CN CN202210409607.XA patent/CN114754802A/zh active Pending
- 2018-05-17 CN CN201880038375.3A patent/CN110753828B/zh active Active
- 2018-05-17 WO PCT/JP2018/019059 patent/WO2018230242A1/ja active Application Filing
-
2019
- 2019-11-07 US US16/676,645 patent/US20200072593A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003287438A (ja) * | 2002-03-28 | 2003-10-10 | Denso Corp | センサ装置 |
| CN1590954A (zh) * | 2003-08-29 | 2005-03-09 | 株式会社电装 | 带有故障检测器的角位置确定设备 |
| CN101136395A (zh) * | 2006-08-30 | 2008-03-05 | 株式会社电装 | 包括两片带有多个电子元件的衬底的功率电子封装件 |
| JP2010060491A (ja) * | 2008-09-05 | 2010-03-18 | Tokai Rika Co Ltd | 操作位置判定装置 |
| JP2015075362A (ja) * | 2013-10-07 | 2015-04-20 | 大同特殊鋼株式会社 | 単位素子対及び薄膜磁気センサ |
Non-Patent Citations (2)
| Title |
|---|
| A fully monolithic integrated anisotropic magnetoresistance based angle sensor for automotive;H. Witschnig等;《2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems 》;20131231;第2257-2260页 * |
| 基于DSP的开关磁阻电机调速控制器研究;高金行等;《微电机》;20080128;第41卷(第01期);第85-86、89页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114754802A (zh) | 2022-07-15 |
| JP2019002778A (ja) | 2019-01-10 |
| CN110753828A (zh) | 2020-02-04 |
| WO2018230242A1 (ja) | 2018-12-20 |
| US20200072593A1 (en) | 2020-03-05 |
| JP6787260B2 (ja) | 2020-11-18 |
| DE112018003016T5 (de) | 2020-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110753828B (zh) | 位置传感器 | |
| CN110741231B (zh) | 位置传感器 | |
| WO2018230087A1 (ja) | ポジションセンサ | |
| CN105222812A (zh) | 具有三个半桥结构的传感器系统 | |
| US11733063B2 (en) | Position sensor | |
| JP5116751B2 (ja) | 磁気検出装置 | |
| CN109416263B (zh) | 旋转检测装置 | |
| WO2006020626A1 (en) | Precision non-contact digital switch | |
| WO2019171763A1 (ja) | リニアポジションセンサ | |
| JP7167739B2 (ja) | ポジションセンサ | |
| WO2019167449A1 (ja) | リニアポジションセンサ | |
| KR20070054075A (ko) | 자기 검출 장치 | |
| EP3913333B1 (en) | Position detection device | |
| JP7559865B2 (ja) | ポジションセンサ | |
| WO2021140724A1 (ja) | 位置検出装置 | |
| WO2019171764A1 (ja) | リニアポジションセンサ | |
| JP2024012271A (ja) | 車両内の運動軌道に沿って運動するボディの位置を特定する距離センサ装置 | |
| CN113316709A (zh) | 旋转检测装置 | |
| JP2014173970A (ja) | 電流センサ | |
| JP2007228000A (ja) | 磁気式スイッチ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |