CN110160552B - 导航信息确定方法、装置、设备和存储介质 - Google Patents
导航信息确定方法、装置、设备和存储介质 Download PDFInfo
- Publication number
- CN110160552B CN110160552B CN201910456455.7A CN201910456455A CN110160552B CN 110160552 B CN110160552 B CN 110160552B CN 201910456455 A CN201910456455 A CN 201910456455A CN 110160552 B CN110160552 B CN 110160552B
- Authority
- CN
- China
- Prior art keywords
- lane
- lane change
- path
- precision
- determining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 59
- 230000008859 change Effects 0.000 claims abstract description 464
- 238000013507 mapping Methods 0.000 claims abstract description 49
- 241000274965 Cyrestis thyodamas Species 0.000 claims abstract description 34
- 230000001133 acceleration Effects 0.000 claims description 18
- 238000006243 chemical reaction Methods 0.000 claims description 10
- 238000000926 separation method Methods 0.000 claims description 10
- 238000004590 computer program Methods 0.000 claims description 6
- 230000006870 function Effects 0.000 claims description 6
- 238000004364 calculation method Methods 0.000 abstract description 9
- 238000010586 diagram Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 8
- 230000004044 response Effects 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 5
- 239000013307 optical fiber Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000000644 propagated effect Effects 0.000 description 2
- 230000035484 reaction time Effects 0.000 description 2
- 241001149900 Fusconaia subrotunda Species 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
本发明实施例公开了一种导航信息确定方法、装置、设备和存储介质。该方法包括:将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
Description
技术领域
本发明实施例涉及自动驾驶技术领域,尤其涉及一种导航信息确定方法、装置、设备和存储介质。
背景技术
随着信息和控制技术的快速发展,自动驾驶技术逐渐被汽车厂家和用户所接受。自动驾驶不仅能够将汽车行驶的危险性降到最低,而且能够减轻用户繁重的驾驶任务。相应的自动驾驶过程中的地图导航尤为重要。
目前自动驾驶技术采用普通地图进行导航,在普通地图的导航过程中,普通地图可以根据用户输入的起点和终点规划导航路径,并根据规划的导航路径,对自动驾驶车辆进行提示性的路径导航,例如在自动驾驶车辆驶出或者驶入高速的场景中,提示车辆需要驶出匝道或者驶入高速主路。
自动驾驶车辆在高速行驶状态,自动驾驶系统需要精确的信息以完成对车辆的控制。然而,由于普通地图的精度较低,现有导航技术只能提供道路级的提示信息,导航精度较低,无法满足在自动驾驶场景下对于车道变换信息的需求。
发明内容
本发明实施例提供了一种导航信息确定方法、装置、设备和存储介质,能够车道级的导航变道信息。
第一方面,本发明实施例提供了一种导航信息确定方法,包括:
将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;
依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
第二方面,本发明实施例提供了一种导航信息确定装置,包括:
路径转换模块,用于将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;
变道信息规划模块,用于依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
变道导航信息生成模块,用于依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
第三方面,本发明实施例提供了一种设备,包括:
一个或多个处理器;
存储器,用于存储一个或多个程序;
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本发明任意实施例所述的导航信息确定方法。
第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明任意实施例所述的导航信息确定方法。
本发明实施例通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中,同时生成各路径连接点中车道的变道信息,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
附图说明
图1为本发明实施例一提供的一种导航信息确定方法的流程图;
图2为本发明实施例二提供的一种导航信息确定方法的流程图;
图3为本发明实施例二提供的普通导航路径映射到高精地图的流程图;
图4为本发明实施例二提供的普通导航路径映射到高精地图的示意图;
图5为本发明实施例三提供的一种导航信息确定方法的流程图;
图6为本发明实施例四提供的匝道驶入高速车道场景下导航信息确定的流程图;
图7为本发明实施例四提供的匝道驶入高速车道场景的示例图;
图8为本发明实施例五提供的高速车道驶入匝道场景下导航信息确定的流程图;
图9为本发明实施例五提供的高速车道驶入匝道场景的示例图;
图10为本发明实施例六提供的车道合流场景下导航信息确定的流程图;
图11为本发明实施例六提供的车道合流场景的示例图;
图12为本发明实施例七提供的车道分流场景下导航信息确定的流程图;
图13为本发明实施例七提供的车道分流场景的示例图;
图14为本发明实施例八提供的一种导航信息确定装置的结构示意图;
图15为本发明实施例九提供的一种设备的结构示意图。
具体实施方式
下面结合附图和实施例对本发明实施例作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明实施例,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明实施例相关的部分而非全部结构。
实施例一
图1为本发明实施例一提供的一种导航信息确定方法的流程图,本实施例可适用于在驾驶过程中,尤其是自动驾驶场景,提供车道级的导航信息的情况,该方法可由一种导航信息确定装置来执行,该装置可以采用软件和/或硬件的方式实现,优选是配置于电子导航设备中,例如车载导航设备。该方法具体包括如下:
S110、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
在本发明具体实施例中,普通地图是指常规的导航地图,其使用者是用户,用于地图的导航和搜索等。例如车载导航地图,在车内通常属于车载信息娱乐系统,带有显示屏。普通地图中仅包含简单道路线条、信息点以及行政区域边界等粗粒度的道路信息。高精地图是指高精度、精细化定义的地图,其使用者是计算机,用于高精度定位、辅助环境感知、规划与决策等。高精地图通常属于车载安全系统,不需要屏幕,作为高精引擎为车辆或用户提供服务。高精地图包含细粒度的道路信息,可以包括各道路上的车道模型、道路部件、道路属性和其他的定位图层等。
本实施例中,预先将普通地图与高精地图的映射关系存储在车端系统中,用于导航路径的高精度转换。具体的,在车道级别导航的过程中,首先采用通用的导航地图即普通地图,依据用户输入的起始点和终止点进行导航路径的规划,得到普通地图上规划生成的普通导航路径。其中,普通导航路径可以由至少一条子路径组成,普通导航路径中仅包含道路级别的导航信息,且该导航信息均为提示性信息,例如提示用户沿道路A进行行驶,以及提示用户靠道路A的中间三车道进行行驶等。因此基于普通地图生成的普通导航路径,并不能向用户或车端提供关于道路中各车道信息以及各车道上的变道导航信息等。
本实施例其次依据普通地图与高精地图的映射关系,将普通导航路径中各子路径起始点映射到高精地图中。其中,由于高精地图的精度远远大于普通地图,因此普通地图与高精地图中的路径划分可能存在区别,普通地图中的路径可能会对应高精地图中的多条路径,或对应高精地图中路径的一部分。因此本实施例还可以依据普通导航路径中各子路径起始点与高精地图中路径之间的几何距离,确定与该起始点最近的多条候选高精路径,并依据普通路径上的点与候选高精路径之间的几何距离,确定高精地图中与普通导航路径最相似的路径,得到普通导航路径映射后的高精导航路径。相应的,高精导航路径可以由这是一条子路径组成,基于路径行驶方向,每个子路径中可以包含至少一条车道。由此,高精导航路径在普通导航路径的导航规划的基础上,具有更高精度以及更细化的地图信息,例如各路径上的车道数量、车道行驶方向、车道线信息以及转向信息等。
S120、依据高精导航路径以及高精导航路径的车道信息,确定变道信息。
在本发明具体实施例中,高精导航路径的车道信息包括车道数量、车道行驶方向、车道线信息以及转向信息等。在高精导航路径的基础上,通过对高精导航路径中各车道的车道信息的辨别,确定各车道的物理不可通行情况,例如车道合流的情况等,并确定各车道基于高精导航路径的逻辑不可通行情况,例如高速驶入匝道的情况等。从而在物理不可通行或逻辑不可通行的路段中,需要提前变更到物理可通行且逻辑可通行的车道中,以此基于高精导航路径中各车道的车道信息,确定各车道的变道点、变道方向以及变道数量等变道信息。
具体的,依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段;依据变道路段所属的变道场景以及车道信息,确定变道路段的目标变道车道和可行驶车道;依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息。以此在规划导航路径时,就生成路径当中各车道上可能存在的变道信息,或者在车辆依据导航路径行驶的过程中,实时生成路径当中各车道上可能存在的变道信息,供车辆在相应车道中行驶时进行变道信息的提取。
S130、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
在本发明具体实施例中,变道信息是指在规划导航路径时,就生成的路径中各车道上可能存在的变道信息,或者在车辆依据导航路径行驶的过程中,实时生成的路径中各车道上可能存在的变道信息,从而将车辆所在车道的变道信息提前提供给用户或车端系统供参考。车辆变道导航信息是指在车辆实际行驶过程,即在导航路径以及变道信息规划之后,依据车辆的实际行驶情况,例如所行驶车道以及行驶速度等,从规划的变道信息中提取出的与实际行驶情况相关的变道导航信息。也就是说,本实施例中可以不将全部车道的变道信息都提供给用户或车端,而只将车辆当前行驶所在的车道的变道信息提取出来,将有效的导航信息提供给用户或车端即可。其中,车辆变道导航信息至少包括变道点、变道方向和变道次数,以及物理不可通行或逻辑不可通行。
本实施例中,考虑到不同行驶速度下车辆变道的反应时间不同,即车辆行驶越快,则需要的变道反应时间及反应路程越长。因此可以预先根据不同路径上的交通规定情况,例如最高和/或最低限速等,确定不同行驶速度下的变道反应距离信息,从而将各路径下不同的行驶速度与变道反应距离信息进行关联,在车辆实际行驶过程中,依据车辆行驶速度,对提取的变道信息进行动态调整,以生成符合车辆当前行驶情况的车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中,同时生成各路径连接点中车道的变道信息,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例二
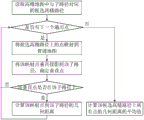
本实施例在上述实施例一的基础上,提供了导航信息确定方法的一个优选实施方式,能够将普通导航路径映射到高精地图中,得到对应的高精导航路径。图2为本发明实施例二提供的一种导航信息确定方法的流程图,其中,步骤S110具体可以包括步骤S210-S240,如图2所示,该方法包括以下具体:
S210、依据普通地图与高精地图之间的映射关系,将普通导航路径中子路径的起始点映射到高精地图上。
在本发明具体实施例中,普通地图与高精地图之间的映射关系中,可以包括关键点之间的映射关系,也可以包括关键路段之间的映射关系等。本实施例不对映射关系的具体内容进行限定。普通导航路径中可以包括至少一条子路径,普通导航路径通过各子路径首尾相连,构成由出发起始点到目的终止点之间完整的普通导航路径。其中,每个子路径的起始点也就是相邻子路径的连接点。由于地图中一个点可以连接多条路径,且基于地图的精度,点的位置范围相对固定,而路径的映射可能存在差别。因此以各子路径的起始点为基础,首先将普通导航路径中子路径的起始点映射到高精地图上。例如,普通导航路径中第一条子路径的起始点为大厦A,则在高精地图中映射的起始点也为大厦A。
S220、依据起始点与高精地图中道路之间的几何距离,从高精地图中确定该子路径的至少一条候选高精路径。
在本发明具体实施例中,经过高精地图中映射得到的子路径起始点,做由起始点到高精地图中各道路之间的垂直线,得到起始点与高精地图中道路之间的几何距离。依据几何距离进行排序,从高精地图中选择与起始点距离最近的至少一条路径作为候选高精路径。示例性的,若起始点与某道路之间的几何距离为零,则说明该起始点就位于该道路上,则该道路必然为候选高精路径之一。
S230、将候选高精路径上的点投影到该子路径中,确定候选高精路径上的点与该子路径之间的几何距离。
在本发明具体实施例中,在候选高精路径中,基于预设间隔距离,由候选高精路径的起始点起,依次获取候选高精路径上的多个点。依次遍历候选高精路径中的各个点,同样将候选高精路径上的点反向映射回普通地图中,经过普通地图中映射得到的点,做由该映射点到普通导航路径的该子路径之间的垂直线,进行垂直投影,若得到的垂直点在该子路径上,则计算该映射点与垂直点之间的距离,得到该映射点到普通导航路径的该子路径之间的几何距离。
S240、依据候选高精路径上的点与该子路径之间的几何距离,从高精地图的候选高精路径中,确定与普通导航路径中该子路径对应的高精导航路径。
在本发明具体实施例中,在遍历完成时,依据候选高精路径到普通地图中的各个映射点,到普通导航路径的该子路径之间的几何距离,计算该候选高精路径上所有点的几何距离的平均值,得到各个候选高精路径到普通导航路径的该子路径之间的平均几何距离。其中,平均几何距离越小,则说明该候选高精路径与普通导航路径的该子路径之间的相似度越大。因此,从高精地图的候选高精路径中,选择平均几何距离最小的候选高精路径,作为普通导航路径中该子路径对应的高精导航路径,完成导航路径的映射。
示例性的,图3为普通导航路径映射到高精地图的流程图,图4为普通导航路径映射到高精地图的示意图。结合图3和图4,针对普通地图中普通导航路径的子路径310,在高精地图中确定了3条候选高精路径321、322和323。对于候选高精路径323,假设确定其上6个点进行比对,依次遍历读取各个点。在读取点3231时,将点3231映射到普通地图中,得到映射点3101。确定该映射点3101垂直投影到子路径310的垂直点。如图4可以看出,该垂直点在子路径310的延长线上,即该垂直点不在子路径310上,则读取候选高精路径323的下一个点3232,并得到点3232在普通地图上的映射点3102,对子路径310进行垂直投影。由图4可以看出,映射点3102到子路径310的垂直点在子路径310上,则计算映射点3102到子路径310的几何距离。以此类推,直到读取完候选高精路径323上的所有点,计算所有点的平均几何距离,得到候选高精路径323到子路径310的平均几何距离。最终依据候选高精路径321、322以及323到子路径310的平均几何距离,可以选择平均几何距离最小的候选高精路径作为子路径310的高精导航路径。
值得注意的是,上述示例仅仅是对于方案清楚描述的示例性说明,本实施例的实际处理方式并不局限于此。例如,实际情况中,高精地图可能仅以数据的形式来表示并进行数据处理,而并没有实际可显示的地图界面。
S250、依据高精导航路径以及高精导航路径的车道信息,确定变道信息。
S260、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中,得到对应的高精导航路径,为车道级别的变道导航信息的生成提供依据,提高了路径信息的准确度。
实施例三
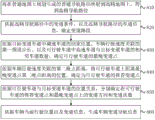
本实施例在上述实施例一的基础上,提供了导航信息确定方法的一个优选实施方式,能够依据高精导航路径规划路径中每个车道的变道信息。图5为本发明实施例三提供的一种导航信息确定方法的流程图,其中,步骤S120具体可以包括步骤S520-S540,如图5所示,该方法包括以下具体:
S510、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
S520、依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段。
在本发明具体实施例中,高精导航路径中的变道条件是指车道前进方向物理不可通行,或基于高精导航路径确定的车道前进方向逻辑不可通行。例如,当车辆由待合流车道向合流车道行驶时,待合流车道前方没有可通行道路,则待合流车道属于物理不可通行。再例如,当车辆由高速车道向匝道行驶时,高速车道本身前方是存在道路可以通行的,但基于高精导航路径,此时车辆必须驶出高速,则此时的高速车道前方是逻辑不可通行。高精导航路径的车道信息包括车道数量、车道行驶方向、车道线信息以及转向信息等。
本实施例在高精导航路径的基础上,以高精导航路径中的变道条件为依据,通过对高精导航路径中各车道的车道信息的辨别,确定各车道的物理不可通行情况,同时基于高精导航路径确定各车道的逻辑不可通行情况。从而将物理不可通行或逻辑不可通行的路段,确定为变道路段。
示例性的,当车辆由待合流车道向合流车道行驶时,将待合流车道与合流车道的连接点之前的一定距离内的路段,确定为该场景下的变道路段。当车辆由高速车道向匝道行驶时,以高速车道与匝道的连接点对应的横向位置为基准,将该基准点之前的一定距离内的路段,确定为该场景下的变道路段。
S530、依据变道路段所属的变道场景以及车道信息,确定变道路段的目标变道车道和可行驶车道。
在本发明具体实施例中,变道场景是指物理不可通行或逻辑不可通行的情况所对应的具体道路行驶场景,例如可以包括高速车道驶入匝道、匝道驶入高速车道、车道合流以及车道分流等场景。相应的,目标变道车道是指在变道场景下,变道后所要变更的行驶车道;可行驶车道是指在变道之前,能够行驶的所有车道。
具体的,首先依据车道信息,在交通规定的基础上,例如不可跨越长实线进行变道,依据变道路段所属的变道场,确定变道路段的目标变道车道和可行驶车道。示例性的,在匝道驶入高速车道场景下,将匝道和加速车道确定为可行驶车道,将高速车道,尤其是与加速车道相邻的高速车道,确定为目标变道车道。在高速车道驶入匝道的场景下,将所有高速车道确定为可行驶车道,将减速车道和匝道确定为目标变更车道。在车道合流的场景下,将待合流车道确定为可行驶车道,将待合流车道相邻的车道即与合流后的车道相通的车道,确定为目标变更车道。在车道分流的场景下,将待分流车道确定为可行驶车道,将高精导航路径指定的分流后的导航路径确定为目标变更车道。
S540、依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息。
在本发明具体实施例中,变道信息至少包括变道点、变道方向以及变道数量等信息。其中,变道点是指用于指示用户进行变道的位置点,变道点可以包括推荐变道点和最晚变道点,即推荐变道点为基于车辆行驶情况以及路况,为用户或车辆提供了优选变道点,车辆在推荐变道点起具备充足的反应时间和反应路程进行变道。由于变道信息是预先提供的,因此用户可以通过对导航路径的识别,在推荐变道点之前进行变道。最晚变道点是指保证用户在最理想的情况下能够较快的变道的位置点,当晚于最晚变道点时,即可能存在不能变道或变道失败的情况。可以理解的是,有推荐变道点至最晚变道点的方向,与此路径的行驶方向一致。在特殊路径情况下,例如路径长度较短,则可能存在推荐变道点与最晚变道点重叠的情况。
本实施例中,考虑到不同行驶速度下车辆变道的反应时间不同,即车辆行驶越快,则需要的变道反应时间及反应路程越长。因此可以预先根据不同路径上的交通规定情况,例如最高和/或最低限速等,确定该路径下不同行驶速度及其关联的距离信息。在变道信息规划的过程中,以距离信息为未知变量,对可行驶车道上进行变道信息的规划,以使车辆在任意可行驶车道上都能够变更至目标变更车道。
可选的,依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点;依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
本实施例中,在各类变道场景中,依据当前导航路径下车辆行驶速度关联的距离信息,在变道路段的可行驶车道上,由车道变更点向前推一定的距离,确定各个可行驶车道的变道点。同时依据各个可行驶车道与目标变道车道之间的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
S550、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
在本发明具体实施例中,依据车辆当前行驶位置以及变道信息,确定当前车辆所在的目标行驶车道。从规划的车道信息中,提取该目标行驶车道的变道信息。并依据车辆当前的实际行驶速度,确定车辆行驶速度关联的距离信息,对提取的变道信息中变道点的确定进行动态调整。示例性的,若规划的车道信息中,变道点都是依据未知量的距离信息确定的,则将确定的实际行驶速度关联的距离信息添加至变道信息中,以生成准确的且与车辆行驶情况相符的变道点;若规划的车道信息中,变道点都是依据规划时车辆行驶速度关联的距离信息或者平均行驶速度关联的距离信息确定的,则依据确定的实际行驶速度关联的距离信息,动态调整变道信息中的变道点位置。从而在车道级别的导航过程中,生成与车辆行驶情况相符的车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中;在得到的高精导航路径的基础上,依次确定路径中的变道路段、变道路段中的可行驶车道和目标变道车道、以及可行驶车道上的变道点、变道方向和变道次数等变道信息,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息,并依据车辆实际行驶情况动态调整变道信息,以生成符合车辆当前行驶状态的车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例四
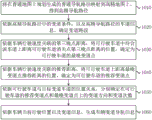
本实施例在上述实施例三的基础上,提供了导航信息确定方法的一个优选实施方式,能够对匝道驶入高速车道的变道场景进行变道信息规划。图6为本发明实施例四提供的匝道驶入高速车道场景下导航信息确定的流程图,如图6所示,该方法包括以下具体:
S610、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
S620、依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段。
S630、若变道路段所属的变道场景为匝道驶入高速车道场景,则将可行驶车道中匝道与加速车道的连接点,确定为可行驶车道的推荐变道点。
在本发明具体实施例中,图7为匝道驶入高速车道场景的示例图。如图7所示,在匝道驶入高速车道场景中,可行驶车道包括匝道710和加速车道720,目标变更车道为与加速车道720相邻的高速车道730。空心圆以及实心圆表示线路之间的连接点。本实施例可以在车辆行驶到匝道710边界时就开始变道,因此可以将可行驶车道中匝道710与加速车道720的连接点,确定为可行驶车道的推荐变道点740。
S640、依据车辆行驶速度关联的第一晚点距离,将可行驶车道中距离加速车道消失点第一晚点距离的位置,确定为可行驶车道的最晚变道点。
在本发明具体实施例中,为了保证车辆行驶到最晚变道点时还能成功变道,确定车辆行驶速度关联的第一晚点距离。将可行驶车道中距离加速车道消失点第一晚点距离的位置,确定为可行驶车道的最晚变道点。如图7中,将加速车道720中距离加速车道720消失点第一晚点距离的位置750,确定为可行驶车道的最晚变道点。其中,在变道信息的规划过程中,该第一晚点距离可以为未知量,供车辆变道导航信息生成时,依据实际的车辆行驶速度进行添加;也可以为当前车辆实际行驶速度关联的具体距离值;也可以为该车道的平均行驶速度关联的具体距离值等,供车辆变道导航信息生成时,依据实际的车辆行驶速度进行动态调整。
可选的,若可行驶车道中加速车道的长度小于第一晚点距离,则确定可行驶车道的最晚变道点与推荐变道点重叠。
S650、依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
在本发明具体实施例中,如图7所示,由可行驶车道变更至目标变道车道的变道方向为向左变道,变道次数为1次。
S660、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
在本发明具体实施例中,若存在可行驶车道的最晚变道点与推荐变道点重叠,则在生成车辆变道导航信息时,可以提醒用户可行驶车道长度较短,供用户选择在存在变道点时或之前就进行变道操作,或者强制车辆在变道点时立即根据路况进行变道。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中;在得到的高精导航路径的基础上,对匝道驶入高速车道的路段进行可行驶车道和目标变道车道的确定、以及可行驶车道上的变道点、变道方向和变道次数等变道信息的规划,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息,并依据车辆实际行驶情况动态调整变道信息,以生成符合车辆当前行驶状态的车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例五
本实施例在上述实施例三的基础上,提供了导航信息确定方法的一个优选实施方式,能够对高速车道驶入匝道的变道场景进行变道信息规划。图8为本发明实施例五提供的高速车道驶入匝道场景下导航信息确定的流程图,如图8所示,该方法包括以下具体:
S810、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
S820、依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段。
S830、依据目标变道车道中减速车道的结束位置、车辆行驶速度关联的第一预设步长、以及可行驶车道中高速车道与目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点。
在本发明具体实施例中,为了保证车辆行驶到最晚变道点时还能成功变道,首先确定各可行驶车道的最晚变道点。图9为高速车道驶入匝道场景的示例图。如图9所示,在高速车道驶入匝道场景中,可行驶车道包括高速车道911、高速车道912以及高速车道913,目标变更车道包括减速车道920和匝道930。空心圆以及实心圆表示线路之间的连接点。考虑到距离减速车道920越远的高速车道,其所需的变道反应时间和反应路程越长,因此以减速车道920的结束位置为基准,以车辆行驶速度关联的第一预设步长为间隔,依据可行驶车道与目标变道车道的相邻车道数量,在与减速车道920相邻的第一条高速车道913上,从结束位置向前推一个第一预设步长,得到高速车道913的最晚变道点。以此类推,在与减速车道920相邻的第二条高速车道912上,从高速车道913的最晚变道点向前推一个第一预设步长,得到高速车道912的最晚变道点;在与减速车道920相邻的第三条高速车道911上,从高速车道912的最晚变道点向前推一个第一预设步长,得到高速车道911的最晚变道点。
可选的,依据第一预设步长,以及可行驶车道中高速车道与目标变道车道的相邻车道数量,确定可行驶车道的第一最晚变道距离;以可行驶车道上与减速车道的结束位置横向对应的位置作为基准位置,将可行驶车道上与基准位置相距第一最晚变道距离的位置,确定为可行驶车道的最晚变道点。
本实施例中,各可行驶车道上最晚变道点的推出顺序不进行限定,其根本在于,依据可行驶车道中高速车道与目标变道车道的相邻车道数量,将数量与第一预设步长的乘积确定为各可行驶车道的距离信息,从而在各可行驶车道上,以减速车道920的结束位置横向对应的位置为基准位置,向前推确定的距离信息,即可得到各可行驶车道的最晚变道点。
可选的,若任一可行驶车道的长度,小于该可行驶车道与目标变道车道的相邻车道数量与第一预设步长的乘积,则确定该可行驶车道的起始位置为该可行驶车道的最晚变道点。
S840、依据车辆行驶速度关联的第二晚点距离,将可行驶车道上距离最晚变道点第二晚点距离的位置,确定为可行驶车道的推荐变道点。
在本发明具体实施例中,确定车辆行驶速度关联的第二晚点距离,依次在各可行驶车道上,由各可行驶车道的最晚变道点向前推第二晚点距离,确定该位置为可行驶车道的推荐变道点。
可选的,若任一可行驶车道中,最晚变道点与起始位置之间的距离,小于车辆行驶速度关联的第二晚点距离,则确定该可行驶车道的起始位置为该可行驶车道的推荐变道点。
S850、依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
S860、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中;在得到的高精导航路径的基础上,对高速车道驶入匝道的路段进行可行驶车道和目标变道车道的确定、以及可行驶车道上的变道点、变道方向和变道次数等变道信息的规划,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息,并依据车辆实际行驶情况动态调整变道信息,以生成符合车辆当前行驶状态的车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例六
本实施例在上述实施例三的基础上,提供了导航信息确定方法的一个优选实施方式,能够对车道合流变道场景进行变道信息规划。图10为本发明实施例六提供的车道合流场景下导航信息确定的流程图,如图10所示,该方法包括以下具体:
S1010、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
S1020、依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段。
S1030、依据车辆行驶速度关联的第三晚点距离,将可行驶车道中待合流车道上距离可行驶车道消失点第三晚点距离的位置,确定为可行驶车道的最晚变道点。
在本发明具体实施例中,为了保证车辆行驶到最晚变道点时还能成功变道,首先确定各可行驶车道的最晚变道点。图11为车道合流场景的示例图。如图11所示,在车道合流场景中,可行驶车道包括车道1111、车道1112以及车道1113,目标变道车道至少包括车道1112。空心圆以及实心圆表示线路之间的连接点。在车道合流场景中,由于车道1111和车道1112本身就属于合流后的车道,因此仅对待合流车道1113进行变道信息规划即可。同样以车道1113的消失点为基准,确定车辆行驶速度关联的第三晚点距离,将距离消失点第三晚点距离的位置,确定为待合流车道1113的最晚变道点。
S1040、依据车辆行驶速度关联的推荐距离,将可行驶车道上距离最晚变道点推荐距离的位置,确定为可行驶车道的推荐变道点。
在本发明具体实施例中,确定当前场景下车辆行驶速度关联的推荐距离,由车道1113的最晚变道点向前推,确定距离最晚变道点推荐距离的位置为车道1113的推荐变道点。
S1050、依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
S1060、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中;在得到的高精导航路径的基础上,对车道合流的路段进行可行驶车道和目标变道车道的确定、以及可行驶车道上的变道点、变道方向和变道次数等变道信息的规划,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息,并依据车辆实际行驶情况动态调整变道信息,以生成符合车辆当前行驶状态的车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例七
本实施例在上述实施例三的基础上,提供了导航信息确定方法的一个优选实施方式,能够对车道分流变道场景进行变道信息规划。图12为本发明实施例七提供的车道分流场景下导航信息确定的流程图,如图12所示,该方法包括以下具体:
S1210、将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径。
S1220、依据高精导航路径中的变道条件,以及高精导航路径的车道信息,确定变道路段。
S1230、依据车道分离点、车辆行驶速度关联的第二预设步长、以及可行驶车道中待分流车道与目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点。
在本发明具体实施例中,为了保证车辆行驶到最晚变道点时还能成功变道,首先确定各可行驶车道的最晚变道点。图13为车道分流场景的示例图。如图13所示,在车道分流场景中,可行驶车道包括车道1311、车道1312以及车道1313,目标变道车道为高精导航路径指定的分流后的导航路径1320。空心圆以及实心圆表示线路之间的连接点。在本车道合流场景中,考虑到距离减速车道1320越远的车道,其所需的变道反应时间和反应路程越长,因此以车道分离点为基准,以车辆行驶速度关联的第二预设步长为间隔,依据可行驶车道与目标变道车道的相邻车道数量,在与目标变道车道1320相邻的第一条车道1312上,从分离点向前推一个第二预设步长,得到车道1312的最晚变道点。以此类推,在与目标变道车道1320相邻的第二条车道1311上,从车道1312的最晚变道点向前推一个第二预设步长,得到车道1311的最晚变道点。
可选的,依据车辆行驶速度关联的第二预设步长,以及可行驶车道与目标变道车道的相邻车道数量,确定可行驶车道的第二最晚变道距离;以可行驶车道上与车道分离点横向对应的位置作为基准位置,将可行驶车道上与基准位置相距第二最晚变道距离的位置,确定为可行驶车道的最晚变道点。
本实施例中,各可行驶车道上最晚变道点的推出顺序不进行限定,其根本在于,依据可行驶车道中车道与目标变道车道的相邻车道数量,将数量与第二预设步长的乘积确定为各可行驶车道的距离信息,从而在各可行驶车道上,以车道分离点横向对应的位置为基准位置,向前推确定的距离信息,即可得到各可行驶车道的最晚变道点。
S1240、依据车辆行驶速度关联的第四晚点距离,将可行驶车道上距离最晚变道点第四晚点距离的位置,确定为可行驶车道的推荐变道点。
在本发明具体实施例中,确定车辆行驶速度关联的第四晚点距离,依次在各可行驶车道上,基于路径行驶距离,由各可行驶车道的最晚变道点向前推第四晚点距离,确定该位置为可行驶车道的推荐变道点。
S1250、依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
S1260、依据车辆当前行驶位置以及变道信息,生成车辆变道导航信息。
本实施例的技术方案,通过在高精地图引擎中提供车道级导航信息接口,将普通地图规划的导航路径映射到高精地图当中;在得到的高精导航路径的基础上,对车道分流的路段进行可行驶车道和目标变道车道的确定、以及可行驶车道上的变道点、变道方向和变道次数等变道信息的规划,并存储在对应车道上。从而在自动驾驶系统调用高精地图引擎时,依据车辆当前位置能够可以直接查询车辆所在车道及其变道信息,并依据车辆实际行驶情况动态调整变道信息,以生成符合车辆当前行驶状态的车辆变道导航信息。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例八
图14为本发明实施例八提供的一种导航信息确定装置的结构示意图,本实施例可适用于在驾驶过程中,尤其是自动驾驶场景,提供车道级的导航信息的情况,该装置可实现本发明任意实施例所述的导航信息确定方法。该装置具体包括:
路径转换模块1410,用于将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;
变道信息规划模块1420,用于依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
变道导航信息生成模块1430,用于依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
可选的,所述路径转换模块1410具体用于:
依据所述普通地图与所述高精地图之间的映射关系,将所述普通导航路径中子路径的起始点映射到所述高精地图上;
依据所述起始点与所述高精地图中道路之间的几何距离,从所述高精地图中确定该子路径的至少一条候选路径;
将所述候选路径上的点投影到该子路径中,确定所述候选路径上的点与该子路径之间的几何距离;
依据所述候选路径上的点与该子路径之间的几何距离,从所述高精地图的所述候选路径中,确定与所述普通导航路径中该子路径对应的高精导航路径。
可选的,所述变道信息规划模块1420,包括:
变道路段确定单元1421,用于依据所述高精导航路径中的变道条件,以及所述高精导航路径的车道信息,确定变道路段;
变道车道确定单元1422,用于依据所述变道路段所属的变道场景以及所述车道信息,确定所述变道路段的目标变道车道和可行驶车道;
变道信息确定单元1423,用于依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息。
可选的,所述变道信息确定单元1422,包括:
变道点规划子单元,用于依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点;其中,所述变到点包括推荐变道点和最晚变道点;
变道方向及次数确定子单元,用于依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
可选的,所述变道信息确定单元1422具体用于:
若所述变道路段所属的变道场景为匝道驶入高速车道场景,则将可行驶车道中匝道与加速车道的连接点,确定为所述可行驶车道的推荐变道点;
依据车辆行驶速度关联的第一晚点距离,将可行驶车道中距离加速车道消失点所述第一晚点距离的位置,确定为所述可行驶车道的最晚变道点。
可选的,所述变道信息确定单元1422具体用于:
在所述将可行驶车道中匝道与加速车道的连接点,确定为所述可行驶车道的推荐变道点之后,若所述可行驶车道中加速车道的长度小于所述第一晚点距离,则确定所述可行驶车道的最晚变道点与推荐变道点重叠。
可选的,所述变道信息确定单元1422具体用于:
若所述变道路段所属的变道场景为高速车道驶入匝道场景,则依据目标变道车道中减速车道的结束位置、车辆行驶速度关联的第一预设步长、以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点;
依据车辆行驶速度关联的第二晚点距离,将可行驶车道上距离所述最晚变道点第二晚点距离的位置,确定为所述可行驶车道的推荐变道点。
可选的,所述变道信息确定单元1422具体用于:
依据所述第一预设步长,以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第一最晚变道距离;
以可行驶车道上与所述减速车道的结束位置横向对应的位置作为基准位置,将可行驶车道上与所述基准位置相距所述第一最晚变道距离的位置,确定为所述可行驶车道的最晚变道点。
可选的,所述变道信息确定单元1422具体用于:
在所述依据所述第一预设步长,以及所可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第一最晚变道距离之后,若任一可行驶车道的长度,小于该可行驶车道的第一最晚变道距离,则确定该可行驶车道的起始位置为该可行驶车道的最晚变道点。
可选的,所述变道信息确定单元1422具体用于:
在所述确定可行驶车道的最晚变道点之后,若任一可行驶车道中,最晚变道点与起始位置之间的距离,小于车辆行驶速度关联的第二晚点距离,则确定该可行驶车道的起始位置为该可行驶车道的推荐变道点。
可选的,所述变道信息确定单元1422具体用于:
若所述变道路段所属的变道场景为车道合流场景,则依据车辆行驶速度关联的第三晚点距离,将可行驶车道中待合流车道上距离可行驶车道消失点第三晚点距离的位置,确定为所述可行驶车道的最晚变道点;
依据车辆行驶速度关联的推荐距离,将可行驶车道上距离所述最晚变道点所述推荐距离的位置,确定为所述可行驶车道的推荐变道点。
可选的,所述变道信息确定单元1422具体用于:
若所述变道路段所属的变道场景为车道分流场景,则依据车道分离点、车辆行驶速度关联的第二预设步长、以及可行驶车道中待分流车道与目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点;其中,所述目标变道车道为所述高精导航路径指定的分流后的导航路径;
依据车辆行驶速度关联的第四晚点距离,将可行驶车道上距离最晚变道点第四晚点距离的位置,确定为所述可行驶车道的推荐变道点。
可选的,所述变道信息确定单元1422具体用于:
依据车辆行驶速度关联的第二预设步长,以及可行驶车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第二最晚变道距离;
以可行驶车道上与所述车道分离点横向对应的位置作为基准位置,将可行驶车道上与所述基准位置相距所述第二最晚变道距离的位置,确定为所述可行驶车道的最晚变道点。
可选的,变道条件为车道前进方向物理不可通行,或基于高精导航路径确定的车道前进方向逻辑不可通行。
可选的,所述车辆变道导航信息至少包括变道点、变道方向和变道次数,以及物理不可通行或逻辑不可通行。
本实施例的技术方案,通过各个功能模块之间的相互配合,实现了高精导航路径的映射获取、变道路段的确定、变道场景的识别、车道的确定、变道点的规划、变道方向的确定、变道次数的确定以及车辆变道导航信息的生成等功能。本发明实施例通过为自动驾驶车辆提供明确的车道变道信息,而非简单的路径提示性信息,实现了高精度的车道级导航,节约了导航信息实时计算资源,提高了导航精度、效率和准确度。
实施例九
图15为本发明实施例九提供的一种设备的结构示意图,图15示出了适于用来实现本发明实施例实施方式的示例性设备的框图。图15显示的设备仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。
图15显示的设备12仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。该设备12优选为车载电子导航设备。
如图15所示,设备12以通用计算设备的形式表现。设备12的组件可以包括但不限于:一个或者多个处理器16,系统存储器28,连接不同系统组件(包括系统存储器28和处理器16)的总线18。
总线18表示几类总线结构中的一种或多种,包括存储器总线或者存储器控制器,外围总线,图形加速端口,处理器或者使用多种总线结构中的任意总线结构的局域总线。举例来说,这些体系结构包括但不限于工业标准体系结构(ISA)总线,微通道体系结构(MAC)总线,增强型ISA总线、视频电子标准协会(VESA)局域总线以及外围组件互连(PCI)总线。
设备12典型地包括多种计算机系统可读介质。这些介质可以是任何能够被设备12访问的可用介质,包括易失性和非易失性介质,可移动的和不可移动的介质。
系统存储器28可以包括易失性存储器形式的计算机系统可读介质,例如随机存取存储器(RAM)30和/或高速缓存存储器32。设备12可以进一步包括其它可移动/不可移动的、易失性/非易失性计算机系统存储介质。仅作为举例,存储系统34可以用于读写不可移动的、非易失性磁介质(图15未显示,通常称为“硬盘驱动器”)。尽管图15中未示出,可以提供用于对可移动非易失性磁盘(例如“软盘”)读写的磁盘驱动器,以及对可移动非易失性光盘(例如CD-ROM,DVD-ROM或者其它光介质)读写的光盘驱动器。在这些情况下,每个驱动器可以通过一个或者多个数据介质接口与总线18相连。系统存储器28可以包括至少一个程序产品,该程序产品具有一组(例如至少一个)程序模块,这些程序模块被配置以执行本发明实施例各实施例的功能。
具有一组(至少一个)程序模块42的程序/实用工具40,可以存储在例如系统存储器28中,这样的程序模块42包括但不限于操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。程序模块42通常执行本发明实施例所描述的实施例中的功能和/或方法。
设备12也可以与一个或多个外部设备14(例如键盘、指向设备、显示器24等)通信,还可与一个或者多个使得用户能与该设备12交互的设备通信,和/或与使得该设备12能与一个或多个其它计算设备进行通信的任何设备(例如网卡,调制解调器等等)通信。这种通信可以通过输入/输出(I/O)接口22进行。并且,设备12还可以通过网络适配器20与一个或者多个网络(例如局域网(LAN),广域网(WAN)和/或公共网络,例如因特网)通信。如图所示,网络适配器20通过总线18与设备12的其它模块通信。应当明白,尽管图中未示出,可以结合设备12使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理器、外部磁盘驱动阵列、RAID系统、磁带驱动器以及数据备份存储系统等。
处理器16通过运行存储在系统存储器28中的程序,从而执行各种功能应用以及数据处理,例如实现本发明实施例所提供的导航信息确定方法。
实施例十
本发明实施例十还提供一种计算机可读存储介质,其上存储有计算机程序(或称为计算机可执行指令),该程序被处理器执行时用于执行一种导航信息确定方法,该方法包括:
将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;
依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
本发明实施例的计算机存储介质,可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑磁盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。
计算机可读介质上包含的程序代码可以用任何适当的介质传输,包括——但不限于无线、电线、光缆、RF等等,或者上述的任意合适的组合。
可以以一种或多种程序设计语言或其组合来编写用于执行本发明实施例操作的计算机程序代码,所述程序设计语言包括面向对象的程序设计语言—诸如Java、Smalltalk、C++,还包括常规的过程式程序设计语言—诸如”C”语言或类似的程序设计语言。程序代码可以完全地在用户计算机上执行、部分地在用户计算机上执行、作为一个独立的软件包执行、部分在用户计算机上部分在远程计算机上执行、或者完全在远程计算机或设备上执行。在涉及远程计算机的情形中,远程计算机可以通过任意种类的网络——包括局域网(LAN)或广域网(WAN)—连接到用户计算机,或者,可以连接到外部计算机(例如利用因特网服务提供商来通过因特网连接)。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明实施例进行了较为详细的说明,但是本发明实施例不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
Claims (21)
1.一种导航信息确定方法,其特征在于,包括:
将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;其中,依据普通导航路径中各子路径起始点与高精地图中路径之间的几何距离,从所述高精地图中确定每一子路径的至少一条候选高精路径,将所述候选高精路径上各个点反向映射回所述普通地图上,得到所述候选高精路径到所述普通地图中的各个映射点,根据各个映射点到普通导航路径中子路径的几何距离,确定所述候选高精路径到所述子路径的平均几何距离,根据所述平均几何距离确定高精地图中与普通导航路径最相似的路径,得到普通导航路径映射后的高精导航路径;其中,所述候选高精路径上各个点是从候选高精路径的起始点起,在所述候选高精路径上确定的;
依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
2.根据权利要求1所述的方法,其特征在于,所述将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径,包括:
依据所述普通地图与所述高精地图之间的映射关系,将所述普通导航路径中子路径的起始点映射到所述高精地图上;
依据所述起始点与所述高精地图中道路之间的几何距离,从所述高精地图中确定该子路径的至少一条候选高精路径;
将所述候选高精路径上的点投影到该子路径中,确定所述候选高精路径上的点与该子路径之间的几何距离;
依据所述候选高精路径上的点与该子路径之间的几何距离,从所述高精地图的所述候选高精路径中,确定与所述普通导航路径中该子路径对应的高精导航路径。
3.根据权利要求1所述的方法,其特征在于,所述依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息,包括:
依据所述高精导航路径中的变道条件,以及所述高精导航路径的车道信息,确定变道路段;
依据所述变道路段所属的变道场景以及所述车道信息,确定所述变道路段的目标变道车道和可行驶车道;
依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息。
4.根据权利要求3所述的方法,其特征在于,所述依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息,包括:
依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点;其中,所述变道点包括推荐变道点和最晚变道点;
依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
5.根据权利要求4所述的方法,其特征在于,若所述变道路段所属的变道场景为匝道驶入高速车道场景,则所述依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点,包括:
将可行驶车道中匝道与加速车道的连接点,确定为所述可行驶车道的推荐变道点;
依据车辆行驶速度关联的第一晚点距离,将可行驶车道中距离加速车道消失点所述第一晚点距离的位置,确定为所述可行驶车道的最晚变道点。
6.根据权利要求5所述的方法,其特征在于,在所述将可行驶车道中匝道与加速车道的连接点,确定为所述可行驶车道的推荐变道点之后,还包括:
若所述可行驶车道中加速车道的长度小于所述第一晚点距离,则确定所述可行驶车道的最晚变道点与推荐变道点重叠。
7.根据权利要求4所述的方法,其特征在于,若所述变道路段所属的变道场景为高速车道驶入匝道场景,则所述依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点,包括:
依据目标变道车道中减速车道的结束位置、车辆行驶速度关联的第一预设步长、以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点;
依据车辆行驶速度关联的第二晚点距离,将可行驶车道上距离所述最晚变道点第二晚点距离的位置,确定为所述可行驶车道的推荐变道点。
8.根据权利要求7所述的方法,其特征在于,所述依据目标变道车道中减速车道的结束位置、车辆行驶速度关联的第一预设步长、以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点,包括:
依据所述第一预设步长,以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第一最晚变道距离;
以可行驶车道上与所述减速车道的结束位置横向对应的位置作为基准位置,将可行驶车道上与所述基准位置相距所述第一最晚变道距离的位置,确定为所述可行驶车道的最晚变道点。
9.根据权利要求8所述的方法,其特征在于,在所述依据所述第一预设步长,以及可行驶车道中高速车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第一最晚变道距离之后,还包括:
若任一可行驶车道的长度,小于该可行驶车道与目标变道车道的相邻车道数量与第一预设步长的乘积,则确定该可行驶车道的起始位置为该可行驶车道的最晚变道点。
10.根据权利要求7所述的方法,其特征在于,在所述确定可行驶车道的最晚变道点之后,还包括:
若任一可行驶车道中,最晚变道点与起始位置之间的距离,小于车辆行驶速度关联的第二晚点距离,则确定该可行驶车道的起始位置为该可行驶车道的推荐变道点。
11.根据权利要求4所述的方法,其特征在于,若所述变道路段所属的变道场景为车道合流场景,则所述依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点,包括:
依据车辆行驶速度关联的第三晚点距离,将可行驶车道中待合流车道上距离可行驶车道消失点第三晚点距离的位置,确定为所述可行驶车道的最晚变道点;
依据车辆行驶速度关联的推荐距离,将可行驶车道上距离所述最晚变道点所述推荐距离的位置,确定为所述可行驶车道的推荐变道点。
12.根据权利要求4所述的方法,其特征在于,若所述变道路段所属的变道场景为车道分流场景,则所述依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点,包括:
依据车道分离点、车辆行驶速度关联的第二预设步长、以及可行驶车道中待分流车道与目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点;其中,所述目标变道车道为所述高精导航路径指定的分流后的导航路径;
依据车辆行驶速度关联的第四晚点距离,将可行驶车道上距离最晚变道点第四晚点距离的位置,确定为所述可行驶车道的推荐变道点。
13.根据权利要求12所述的方法,其特征在于,所述依据车道分离点、车辆行驶速度关联的第二预设步长、以及可行驶车道中待分流车道与目标变道车道的相邻车道数量,确定可行驶车道的最晚变道点,包括:
依据车辆行驶速度关联的第二预设步长,以及可行驶车道与所述目标变道车道的相邻车道数量,确定所述可行驶车道的第二最晚变道距离;
以可行驶车道上与所述车道分离点横向对应的位置作为基准位置,将可行驶车道上与所述基准位置相距所述第二最晚变道距离的位置,确定为所述可行驶车道的最晚变道点。
14.根据权利要求3所述的方法,其特征在于,变道条件为车道前进方向物理不可通行,或基于高精导航路径确定的车道前进方向逻辑不可通行。
15.根据权利要求1所述的方法,其特征在于,所述车辆变道导航信息至少包括变道点、变道方向和变道次数,以及物理不可通行或逻辑不可通行。
16.一种导航信息确定装置,其特征在于,包括:
路径转换模块,用于将在普通地图上规划生成的普通导航路径映射到高精地图上,得到高精导航路径;其中,依据普通导航路径中各子路径起始点与高精地图中路径之间的几何距离,从所述高精地图中确定每一子路径的至少一条候选高精路径,将所述候选高精路径上各个点反向映射回所述普通地图上,得到所述候选高精路径到所述普通地图中的各个映射点,根据各个映射点到普通导航路径中子路径的几何距离,确定所述候选高精路径到所述子路径的平均几何距离,根据所述平均几何距离确定高精地图中与普通导航路径最相似的路径,得到普通导航路径映射后的高精导航路径;其中,所述候选高精路径上各个点是从候选高精路径的起始点起,在所述候选高精路径上确定的;
变道信息规划模块,用于依据所述高精导航路径以及所述高精导航路径的车道信息,确定变道信息;
变道导航信息生成模块,用于依据车辆当前行驶位置以及所述变道信息,生成车辆变道导航信息。
17.根据权利要求16所述的装置,其特征在于,所述路径转换模块具体用于:
依据所述普通地图与所述高精地图之间的映射关系,将所述普通导航路径中子路径的起始点映射到所述高精地图上;
依据所述起始点与所述高精地图中道路之间的几何距离,从所述高精地图中确定该子路径的至少一条候选高精路径;
将所述候选高精路径上的点投影到该子路径中,确定所述候选高精路径上的点与该子路径之间的几何距离;
依据所述候选高精路径上的点与该子路径之间的几何距离,从所述高精地图的所述候选高精路径中,确定与所述普通导航路径中该子路径对应的高精导航路径。
18.根据权利要求16所述的装置,其特征在于,所述变道信息规划模块,包括:
变道路段确定单元,用于依据所述高精导航路径中的变道条件,以及所述高精导航路径的车道信息,确定变道路段;
变道车道确定单元,用于依据所述变道路段所属的变道场景以及所述车道信息,确定所述变道路段的目标变道车道和可行驶车道;
变道信息确定单元,用于依据车辆行驶速度,以及目标变道车道和可行驶车道之间的位置关系,确定可行驶车道的变道信息。
19.根据权利要求18所述的装置,其特征在于,所述变道信息确定单元,包括:
变道点规划子单元,用于依据车辆行驶速度关联的距离信息,确定可行驶车道的变道点;其中,所述变道点包括推荐变道点和最晚变道点;
变道方向及次数确定子单元,用于依据可行驶车道与目标变道车道的位置关系,分别确定在可行驶车道的推荐变道点和最晚变道点上的变道方向和变道次数。
20.一种电子设备,其特征在于,包括:
一个或多个处理器;
存储器,用于存储一个或多个程序;
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-15中任一项所述的导航信息确定方法。
21.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-15中任一项所述的导航信息确定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910456455.7A CN110160552B (zh) | 2019-05-29 | 2019-05-29 | 导航信息确定方法、装置、设备和存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910456455.7A CN110160552B (zh) | 2019-05-29 | 2019-05-29 | 导航信息确定方法、装置、设备和存储介质 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110160552A CN110160552A (zh) | 2019-08-23 |
| CN110160552B true CN110160552B (zh) | 2021-05-04 |
Family
ID=67629990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910456455.7A Active CN110160552B (zh) | 2019-05-29 | 2019-05-29 | 导航信息确定方法、装置、设备和存储介质 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110160552B (zh) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113022573B (zh) | 2019-12-06 | 2022-11-04 | 华为技术有限公司 | 道路结构检测方法及装置 |
| CN111192468A (zh) * | 2019-12-31 | 2020-05-22 | 武汉中海庭数据技术有限公司 | 基于路口内加减速的自动行驶方法及系统、服务器及介质 |
| CN113112842B (zh) * | 2020-01-13 | 2022-07-22 | 北京地平线机器人技术研发有限公司 | 车道行驶方向更新方法及装置、存储介质及电子设备 |
| CN111207769A (zh) * | 2020-01-15 | 2020-05-29 | 北京小马慧行科技有限公司 | 车道级别的导航方法、装置、存储介质和处理器 |
| CN114537434B (zh) * | 2020-03-20 | 2026-04-14 | 上海商汤临港智能科技有限公司 | 车道导航路径生成方法及装置、驾驶控制方法及装置 |
| CN112543723B (zh) * | 2020-03-26 | 2021-12-21 | 华为技术有限公司 | 一种驾驶控制方法及装置 |
| CN113538923A (zh) * | 2020-04-20 | 2021-10-22 | 深圳富泰宏精密工业有限公司 | 车辆变换车道的警示方法、车载装置 |
| CN112146671B (zh) * | 2020-08-31 | 2022-10-28 | 华为技术有限公司 | 路径规划方法、相关设备及计算机可读存储介质 |
| CN112683293B (zh) * | 2020-12-15 | 2024-06-21 | 东风汽车有限公司 | 一种车载导航方法、电子设备及存储介质 |
| CN114646326B (zh) * | 2020-12-18 | 2026-03-10 | 阿里巴巴集团控股有限公司 | 导航方法、设备、计算机存储介质及计算机程序产品 |
| CN114646324B (zh) * | 2020-12-18 | 2026-03-31 | 阿里巴巴集团控股有限公司 | 导航方法、设备、计算机存储介质及计算机程序产品 |
| CN112747762A (zh) * | 2020-12-28 | 2021-05-04 | 深兰人工智能(深圳)有限公司 | 局部可行驶路径规划方法、装置、电子设备及存储介质 |
| CN112732844B (zh) * | 2021-01-26 | 2022-09-23 | 腾讯科技(深圳)有限公司 | 将道路对象与道路自动关联的方法、装置、设备和介质 |
| CN115235481B (zh) * | 2021-04-23 | 2026-02-03 | 高德软件有限公司 | 一种路网预测树的生成方法、装置和系统 |
| CN113190768B (zh) | 2021-04-29 | 2024-03-12 | 北京百度网讯科技有限公司 | 路径处理方法及装置 |
| CN113340318B (zh) * | 2021-06-30 | 2026-03-06 | 腾讯科技(深圳)有限公司 | 车辆导航方法、装置、电子设备及存储介质 |
| CN113421451B (zh) * | 2021-06-30 | 2024-04-09 | 腾讯科技(深圳)有限公司 | 导航处理方法、装置、电子设备及计算机可读存储介质 |
| CN113701774B (zh) * | 2021-08-26 | 2024-02-06 | 苏州挚途科技有限公司 | 推荐车道突变的路径规划方法和装置 |
| CN113720348B (zh) * | 2021-11-01 | 2022-03-18 | 深圳市城市交通规划设计研究中心股份有限公司 | 一种车路协同环境下的车辆车道级定位方法及电子设备 |
| CN114155319A (zh) * | 2021-12-08 | 2022-03-08 | 武汉中海庭数据技术有限公司 | 一种高精度地图生成辅助变道信息的方法、系统及装置 |
| CN114323041B (zh) * | 2021-12-24 | 2024-09-20 | 深圳一清创新科技有限公司 | 一种关键点图建图方法、装置和电子设备 |
| CN114353811B (zh) * | 2021-12-30 | 2024-08-09 | 广州小鹏自动驾驶科技有限公司 | 高精地图加载方法和装置、车辆和存储介质 |
| CN114590260B (zh) * | 2022-03-28 | 2024-07-09 | 智己汽车科技有限公司 | 一种上下匝道变道方法及系统 |
| CN114858176B (zh) * | 2022-04-13 | 2024-06-18 | 合众新能源汽车股份有限公司 | 一种基于自动驾驶的路径导航方法及装置 |
| CN114858168B (zh) * | 2022-04-27 | 2025-06-03 | 亿咖通(湖北)技术有限公司 | 地图路段匹配、地图数据下发方法、电子设备及存储介质 |
| CN115019531B (zh) * | 2022-05-31 | 2024-03-22 | 东风汽车有限公司东风日产乘用车公司 | 车辆控制方法和车辆 |
| CN114919601A (zh) * | 2022-06-01 | 2022-08-19 | 驭势(上海)汽车科技有限公司 | 一种车辆控制方法、装置、设备、介质及车辆 |
| CN115027495B (zh) * | 2022-06-08 | 2024-07-09 | 智己汽车科技有限公司 | 一种用于智能驾驶系统的信任增强方法及设备 |
| CN115096322A (zh) * | 2022-06-24 | 2022-09-23 | 阿波罗智联(北京)科技有限公司 | 信息处理方法和导航方法 |
| CN115183791B (zh) * | 2022-07-11 | 2025-07-22 | 高德软件有限公司 | 导航方法、装置及基于位置的服务提供方法 |
| CN115265574B (zh) * | 2022-07-29 | 2024-12-27 | 长城汽车股份有限公司 | 路径规划方法、系统及电子设备、车辆 |
| CN115171416B (zh) * | 2022-08-24 | 2023-05-26 | 禾多科技(北京)有限公司 | 推荐行驶信息发送方法、装置、电子设备和介质 |
| CN115855077A (zh) * | 2022-11-21 | 2023-03-28 | 深圳元戎启行科技有限公司 | 高精地图的站点更新方法、电子设备及存储介质 |
| CN115876216A (zh) * | 2023-01-04 | 2023-03-31 | 智道网联科技(北京)有限公司 | 变道导航路径规划方法、装置、电子设备及存储介质 |
| CN116147655A (zh) * | 2023-01-10 | 2023-05-23 | 阿里巴巴(中国)有限公司 | 数字轨道数据的生成方法、装置、电子设备及程序产品 |
| CN115880930A (zh) * | 2023-01-19 | 2023-03-31 | 禾多科技(北京)有限公司 | 导航路线创建失败警报方法、装置、电子设备和介质 |
| CN116202536A (zh) * | 2023-02-02 | 2023-06-02 | 阿里巴巴(中国)有限公司 | 一种变道区间生成方法、装置、计算机设备及存储介质 |
| CN116105763A (zh) * | 2023-02-08 | 2023-05-12 | 阿里巴巴(中国)有限公司 | 一种导航播报方法、装置和电子设备 |
| CN116758772A (zh) * | 2023-03-08 | 2023-09-15 | 浙江吉利控股集团有限公司 | 车辆变道提示方法、装置、车辆和计算机可读存储介质 |
| CN116542869A (zh) * | 2023-03-30 | 2023-08-04 | 高德软件有限公司 | 车道线矢量的平滑方法、高精地图绘制方法、装置及设备 |
| CN118794455A (zh) * | 2023-04-12 | 2024-10-18 | 腾讯科技(深圳)有限公司 | 导航方法、装置、电子设备和存储介质 |
| CN116486621A (zh) * | 2023-06-21 | 2023-07-25 | 联友智连科技有限公司 | 一种前方车辆静止或者低速行驶碰撞预警方法和系统 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103026173A (zh) * | 2010-07-23 | 2013-04-03 | 三菱电机株式会社 | 导航装置 |
| CN105043403A (zh) * | 2015-08-13 | 2015-11-11 | 武汉光庭信息技术有限公司 | 高精度地图路线规划系统及方法 |
| CN106323305A (zh) * | 2015-06-29 | 2017-01-11 | 北京四维图新科技股份有限公司 | 一种导航方法及装置 |
| CN106461406A (zh) * | 2014-06-10 | 2017-02-22 | 歌乐株式会社 | 车道选择装置、车辆控制系统及车道选择方法 |
| CN107953826A (zh) * | 2017-12-08 | 2018-04-24 | 任珍珍 | 具有转向预警功能的导航仪 |
| CN108106629A (zh) * | 2017-12-07 | 2018-06-01 | 风度(常州)汽车研发院有限公司 | 规避追尾的路径引导方法、装置和车辆智能驾驶辅助系统 |
| CN108305477A (zh) * | 2017-04-20 | 2018-07-20 | 腾讯科技(深圳)有限公司 | 一种车道选择方法及终端 |
| CN108387242A (zh) * | 2018-02-07 | 2018-08-10 | 西南交通大学 | 自动驾驶换道准备和执行一体化轨迹规划方法 |
| JP2019059262A (ja) * | 2017-09-25 | 2019-04-18 | 日産自動車株式会社 | 車両走行制御方法及び装置 |
| JP2019067057A (ja) * | 2017-09-29 | 2019-04-25 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | 隊列走行装置 |
-
2019
- 2019-05-29 CN CN201910456455.7A patent/CN110160552B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103026173A (zh) * | 2010-07-23 | 2013-04-03 | 三菱电机株式会社 | 导航装置 |
| CN106461406A (zh) * | 2014-06-10 | 2017-02-22 | 歌乐株式会社 | 车道选择装置、车辆控制系统及车道选择方法 |
| CN106323305A (zh) * | 2015-06-29 | 2017-01-11 | 北京四维图新科技股份有限公司 | 一种导航方法及装置 |
| CN105043403A (zh) * | 2015-08-13 | 2015-11-11 | 武汉光庭信息技术有限公司 | 高精度地图路线规划系统及方法 |
| CN108305477A (zh) * | 2017-04-20 | 2018-07-20 | 腾讯科技(深圳)有限公司 | 一种车道选择方法及终端 |
| JP2019059262A (ja) * | 2017-09-25 | 2019-04-18 | 日産自動車株式会社 | 車両走行制御方法及び装置 |
| JP2019067057A (ja) * | 2017-09-29 | 2019-04-25 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | 隊列走行装置 |
| CN108106629A (zh) * | 2017-12-07 | 2018-06-01 | 风度(常州)汽车研发院有限公司 | 规避追尾的路径引导方法、装置和车辆智能驾驶辅助系统 |
| CN107953826A (zh) * | 2017-12-08 | 2018-04-24 | 任珍珍 | 具有转向预警功能的导航仪 |
| CN108387242A (zh) * | 2018-02-07 | 2018-08-10 | 西南交通大学 | 自动驾驶换道准备和执行一体化轨迹规划方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110160552A (zh) | 2019-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110160552B (zh) | 导航信息确定方法、装置、设备和存储介质 | |
| US12038753B2 (en) | Speed planning method and apparatus, electronic device and storage medium | |
| US10137896B2 (en) | Method and system for operating autonomous driving vehicles using graph-based lane change guide | |
| US20230070760A1 (en) | Method for generating real-time relative map, intelligent driving device, and computer storage medium | |
| CN113340318A (zh) | 车辆导航方法、装置、电子设备及存储介质 | |
| CN111797780A (zh) | 一种跟车轨迹规划方法、装置、服务器及存储介质 | |
| JP6289480B2 (ja) | 走行情報記録システム、方法およびプログラム | |
| CN114194217B (zh) | 车辆自动驾驶方法、装置、电子设备以及存储介质 | |
| CN116067387A (zh) | 标准清晰度到高清晰度导航路线确定 | |
| CN112141110A (zh) | 一种车辆变道方法、装置、设备及存储介质 | |
| CN115042820A (zh) | 自动驾驶车辆控制方法、装置、设备及存储介质 | |
| JP2020052045A (ja) | 車両の軌跡を計画する方法 | |
| CN114858176A (zh) | 一种基于自动驾驶的路径导航方法及装置 | |
| US20250207922A1 (en) | Navigation method and apparatus, electronic device, storage medium, and program product | |
| CN114608599A (zh) | 导航路径生成方法、装置、电子设备及存储介质 | |
| CN115657684B (zh) | 车辆路径信息生成方法、装置、设备和计算机可读介质 | |
| CN117109612A (zh) | 一种道路参考线的生成方法、装置、设备及介质 | |
| CN109270566A (zh) | 导航方法、导航效果测试方法、装置、设备和介质 | |
| CN118089752A (zh) | 基于地图匹配的路线可视化方法、智能设备和存储介质 | |
| CN115031715A (zh) | 导航方法及装置 | |
| CN115583254A (zh) | 路径规划方法、装置、设备以及自动驾驶车辆 | |
| US12522244B2 (en) | Autonomous driving system in heterogeneous SD map and HD map environment and management method for the autonomous driving | |
| CN120024355B (zh) | 一种车辆控制方法、装置、车辆和可读存储介质 | |
| CN116513228B (zh) | 一种车辆变道警示方法、装置、电子设备及存储介质 | |
| CN114646326B (zh) | 导航方法、设备、计算机存储介质及计算机程序产品 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |