CN108431567B - 检测装置以及扭矩传感器 - Google Patents
检测装置以及扭矩传感器 Download PDFInfo
- Publication number
- CN108431567B CN108431567B CN201680075360.5A CN201680075360A CN108431567B CN 108431567 B CN108431567 B CN 108431567B CN 201680075360 A CN201680075360 A CN 201680075360A CN 108431567 B CN108431567 B CN 108431567B
- Authority
- CN
- China
- Prior art keywords
- sensor
- magnetism collecting
- ground
- terminal
- ground terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/221—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to steering wheels, e.g. for power assisted steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
- B62D15/0215—Determination of steering angle by measuring on the steering column
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Power Steering Mechanism (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
检测装置具备导电部件、对置部件以及传感器部。导电部件被设置为能够与为接地电位的接地部件导电。传感器部具有传感器元件、传感器主体以及接地端子。传感器元件配置于导电部件与对置部件之间且导电部件与对置部件之间的距离最短的传感器配置区域。导电部件被设置为在与传感器配置区域为不同区域的可导电区域能够与接地端子或者与接地端子连接的接地布线部导电。由此,由于静电、噪声不经由传感器主体地释放到接地部件,所以能够防止传感器受损,发生误动作。
Description
相关申请的交叉引用
本申请基于2015年12月24日申请的日本申请号2015-251609号和2016年8月3日申请的日本申请号2016-152636号,在此引用其记载内容。
技术领域
本公开涉及检测装置以及扭矩传感器。
背景技术
以往,已知一种使用磁铁和磁传感器的扭矩传感器。例如在专利文献1中,将磁传感器插入在轴向上对置的磁轭之间的间隙来检测磁通密度。
专利文献1:日本特开2003-149062号公报
然而,若磁传感器被配置在电阻最低的路径上,则静电能量通过磁传感器,从而有传感器受到损伤或因噪声而发生传感器的误动作的可能。
发明内容
本公开的目的在于提供一种能够防止传感器受损,发生误动作的检测装置以及扭矩传感器。
根据本公开的第一方式,检测装置具备导电部件、对置部件以及传感器部。导电部件被设置为能够与为接地电位的接地部件导电。对置部件被配置为至少一部分与导电部件对置。传感器部具有传感器元件、传感器主体以及接地端子。
传感器元件被配置于导电部件与对置部件之间且导电部件与对置部件之间的距离最短的传感器配置区域。传感器主体密封传感器元件。接地端子从传感器主体突出并接地。
导电部件被设置为在与传感器配置区域为不同区域的可导电区域,能够与接地端子或者与接地端子连接的接地布线部导电。
由此,由于静电、噪声不经由传感器主体地释放到接地部件,所以能够防止传感器受损,发生误动作。
根据本公开的第二方式,扭矩传感器具备本公开的第一方式的检测装置。传感器元件检测与施加在第一轴和第二轴之间的扭矩相应的磁通量。
由此,由于静电、噪声不经由传感器主体地释放到接地部件,所以能够防止传感器受损,发生误动作。
附图说明
通过参照附图进行下述的详细描述,有关本公开的上述目的以及其它目的、特征、优点会变得更加明确。
图1是表示应用了本公开的第一实施方式的扭矩传感器的电动助力转向系统的示意结构图。
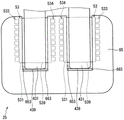
图2是本公开的第一实施方式的扭矩传感器的分解立体图。
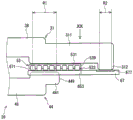
图3是本公开的第一实施方式的扭矩传感器的剖视图。
图4是本公开的第一实施方式的传感器部的立体图。
图5是本公开的第一实施方式的传感器部以及集磁部的剖视图。
图6是图5的VI方向向视图。
图7是图5的VII方向向视图。
图8是表示本公开的第一实施方式的静电的通电路径的示意性的电路图。
图9是本公开的第二实施方式的传感器部以及集磁部的剖视图。
图10是图9的X方向向视图。
图11是本公开的第三实施方式的传感器部以及集磁部的剖视图。
图12是图11的XII方向向视图。
图13是本公开的第四实施方式的传感器部以及集磁部的剖视图。
图14是图13的XIV方向向视图。
图15是图13的XV方向向视图。
图16是本公开的第五实施方式的传感器部以及集磁部的侧面图。
图17是图16的XVII方向向视图。
图18是图16的XVIII方向向视图。
图19是本公开的第六实施方式的传感器部以及集磁部的侧面图。
图20是图19的XX方向向视图。
图21是本公开的第七实施方式的传感器部以及集磁部的侧面图。
图22是图21的XXII方向向视图。
图23是本公开的第八实施方式的传感器部以及集磁部的侧面图。
图24是图23的XXIV方向向视图。
图25是比较例的集磁部以及传感器部的剖视图。
图26是比较例的集磁部以及传感器部的剖视图。
具体实施方式
以下,基于附图对本公开的检测装置以及扭矩传感器进行说明。以下,在多个实施方式中,对于实质相同的结构标注相同的附图标记并省略说明。
(第一实施方式)
将本公开的第一实施方式示于图1~图8。本实施方式的各图均是示意性的图,为了说明,适当地变更比例等来记载。对于后述的实施方式的图也是如此。
如图1和图2所示,使用本实施方式的检测装置21的扭矩传感器10例如被应用于用于辅助车辆的转向操作的电动助力转向装置80。
图1表示具备电动助力转向装置80的转向系统90的整体结构。
作为转向操纵部件的手柄91与转向轴92连接。转向轴92具有作为第一轴的输入轴921和作为第二轴的输出轴922。输入轴921与手柄91连接。在输入轴921的与手柄91相反侧的端部和输出轴922之间,设置检测施加在转向轴92的扭矩的扭矩传感器10。输入轴921和输出轴922通过扭矩传感器10的扭杆13同轴连接。在输出轴922的与输入轴921相反侧的端部,设置小齿轮96。小齿轮96与齿条轴97啮合。在齿条轴97的两端,经由转向横拉杆等连结一对车轮98。
若驾驶员旋转手柄91,则与手柄91连接的转向轴92旋转。转向轴92的旋转运动通过小齿轮96转换为齿条轴97的直线运动,车轮98被转向操纵到与齿条轴97的位移量相应的角度。
电动助力转向装置80具备输出辅助由驾驶员进行的手柄91的转向操纵的辅助扭矩的马达81、控制装置(以下称为“ECU”)85以及扭矩传感器10等。在图1中,马达81和ECU85独立,但也可以为一体。
作为动力传递部的减速齿轮82对马达81的旋转进行减速并传递至转向轴92。即,本实施方式的电动助力转向装置80是所谓的“柱助力式”,但也可以为将马达81的旋转传递至齿条轴97的所谓的“齿条助力式”。
ECU85获取从扭矩传感器10输出的扭矩,并根据检测出的扭矩来控制马达81的驱动。
如图2所示,扭矩传感器10具备扭杆13、多极磁铁15、磁轭17以及检测装置21等,并检测施加在转向轴92的扭矩。
扭杆13的一端利用固定销131固定于输入轴921,另一端利用固定销132固定于输出轴922。扭杆13是棒状的弹性部件,将施加在转向轴92的扭矩转换为扭转位移。
多极磁铁15被固定于输入轴921,沿着周向交替地磁化N极和S极。在本实施方式中,N极和S极的数量是12对,共计为24极,但极对数量并不重要。
磁轭17具有设置于输入轴921侧的第一轭171和设置于输出轴922侧的第二轭176。第一轭171和第二轭176均由软磁体形成为环状,在多极磁铁15的径向外侧固定于输出轴922。轭171、176被未图示的由非磁性材料形成的轭保持部件保持。
第一轭171具有环状部172以及从环状部172向第二轭176侧突出形成的爪173。爪173沿着环状部172的内缘以等间隔设置在整周上。
第二轭176具有环状部177以及从环状部177向第一轭171侧突出形成的爪178。爪178沿着环状部177的内缘以等间隔设置在整周上。
爪173、178的数量与多极磁铁15的极对数量相同(在本实施方式中为12)。爪173、178在周向上错开而交替配置。第一轭171和第二轭176以分离的状态对置。
在扭杆13未产生扭转位移的情况下,即在转向轴92未被施加转向操纵扭矩时,爪173、178的中心位置被配置为与多极磁铁15的N极和S极的边界位置一致。
如图2和图3所示,检测装置21具备集磁环保持部件201、端子保持部件205、屏蔽部件206、集磁环30、40、传感器部51、端子基板61以及防噪音元件71(参照图4)等。
如图3所示,集磁环保持部件201和端子保持部件205由树脂等非磁性材料形成。集磁环保持部件201中,以在径向内侧使集磁环30、40露出的状态保持的环状部202和以能够插拔的方式形成有连接器79的连接器插入部203形成为一体。
端子保持部件205以传感器部51的传感器主体511露出的状态,保持传感器部51的各端子以及端子基板61。端子保持部件205以保持着各端子等且传感器部51被配置在集磁环30、40的集磁部301、401间的状态,通过嵌件成型等被集磁环保持部件201保持。
屏蔽部件206为了屏蔽来自外部的磁,被设置为覆盖集磁环保持部件201的环状部202的径向外侧。
集磁环保持部件201以保持着屏蔽部件206、集磁环30、40以及传感器部51等的状态固定于立柱75。立柱75由铝等能够导电的金属形成,并与车体地线连接。即,立柱75的电位为接地电位,立柱75对应于“接地部件”。在本实施方式中,立柱75作为扭矩传感器10的壳体发挥功能。
在本实施方式中,在集磁环30、40与立柱75之间,形成能够传递静电以及噪声的程度的微小间隙。换言之,集磁环30、40被设置为能够将静电以及噪声传递至立柱75。
如图2和图3所示,集磁环30、40均由镍合金等软磁体形成。集磁环30、40配置于磁轭17的径向外侧,收集来自磁轭17的磁通量。在本实施方式中,上侧集磁环30配置于输入轴921侧,下侧集磁环40配置于输出轴922侧。以下,适当地将输入轴921侧作为“上侧”,将输出轴922侧作为“下侧”。另外,将以扭杆13为中心配置的多极磁铁15、磁轭17以及集磁环30、40的轴向以及径向简称为“轴向”、“径向”。
上侧集磁环30包含形成为环状的上侧基部38以及从上侧基部38向径向外侧突出的2个上侧集磁部301。
下侧集磁环40包含形成为环状的下侧基部48以及从下侧基部48向径向外侧突出的2个下侧集磁部401。
上侧集磁部301和下侧集磁部401为分离的状态,并被配置为对置的面大致平行。
2个传感器部51分别是配置于集磁部301与集磁部401之间并检测集磁部301与集磁部401间的磁通量的变化的磁传感器。
如图4和图5所示,传感器部51具有传感器主体511、输出端子515、电源端子516以及接地端子517。输出端子515、电源端子516以及接地端子517设置于传感器主体511的端子形成面513。端子形成面513朝向径向外侧配置,端子515~517向径向外侧突出设置。在本实施方式中,从一侧按照输出端子515、接地端子517、电源端子516的顺序排列。此外,端子515~517间分离到即使被施加静电时也不能介电击穿的程度。另外,输出端子515与接地端子517距离和电源端子516与接地端子517的距离可以相等,也可以不同。
端子515~517在能够与端子基板61抵接的位置向上侧折弯,通过熔焊等与端子基板61的对应的连接部615、616、617电连接。
端子基板61是金属基板,用于连接传感器部51和ECU85。端子基板61具有输出端子连接部615、电源端子连接部616、接地端子连接部617。各连接部615、616、617分别经由布线208与用于与ECU85连接的连接器79连接(参照图3)。由此,传感器部51和ECU85经由端子基板61等连接。
传感器部51的输出端子515与输出端子连接部615连接,用于传感器部51的检测信号的输出。检测信号经由输出端子连接部615被输出至ECU85。
电源端子516与电源端子连接部616连接,并与设置于ECU85的未图示的作为调节器等的供电部连接。
接地端子517与接地端子连接部617连接,并经由ECU85接地。
防噪音元件71与输出端子连接部615和接地端子连接部617或者电源端子连接部616和接地端子连接部617连接。防噪音元件71是电容器、齐纳二极管等。
图5是表示集磁部301、401以及传感器部51的示意性的剖视图,且与图4中的V-V线剖面对应。在图5中,省略剖面线来记载。对于后述的实施方式的图9、图11、图13、图25以及图26也是如此。
如图5所示,传感器主体511中密封有传感器元件512以及构成差分放大器等检测电路的电子部件等。传感器元件512是霍尔元件等磁检测元件,配置于集磁部301与集磁部401间的距离最短的位置。由此,传感器元件512能够适当地检测集磁环30与集磁环40间的磁通量的变化。
这里,对静电以及噪声的影响进行说明。若静电、噪声施加于装置,则通过电阻最小的路径释放到地线。这里,对于静电,假定以相对的高电压瞬时施加的干扰电压,对于噪声,假定以比静电低的电压连续施加的干扰电压。
例如,在图25所示的比较例的检测装置901中,第二集磁环940的集磁部941形成为与上侧集磁环30的集磁部301相同的形状。该情况下,成为传感器主体511配置在电阻最小的路径上的状态。因此,若被施加静电,则如用箭头Ys2所示,静电能量通过传感器主体511,所以有传感器部51破损的可能。另外,由于噪声通过传感器主体511,所以有发生传感器部51的误动作、误检测的可能。
该情况下,需要对传感器部51本身采取应对静电、噪声的对策或者另行设置用于保护传感器部51免受静电、噪声的影响的保护部件。
另外,在图26所示的比较例的检测装置902中,在第一集磁环930的集磁部931,与下侧集磁环40同样地形成突出部935和弯曲部936。该情况下,由于用箭头Ym2表示的位置为磁阻最小的位置,所以收集的磁通量不会穿过传感器元件512。因此,传感器元件512不能适当地检测集磁环30与集磁环40间的磁通量的变化。
因此,在本实施方式中,如图5、图6以及图7所示,将集磁部301、401形成为由集磁环30、40收集的磁通量穿过传感器元件512并且传感器元件512的配置位置不在电阻最小的路径上。换言之,使接地端子517和下侧集磁部401最接近处亦即可导电区域与集磁部301和集磁部401最接近处亦即传感器配置区域不同,在传感器配置区域配置有传感器元件512。
由此,如图5中用箭头Ym1所示,收集的磁通量穿过传感器元件512。另外,在偏离用箭头Ys1表示的静电以及噪声释放的路径的位置,配置传感器主体511。
在图5中,用符号R1表示集磁部301与集磁部401最接近的位置,用符号R2表示接地端子517与下侧集磁部401最接近的位置。即,用符号R1表示的位置是“导电部件与对置部件的距离最短的传感器配置区域”,用符号R2表示的位置是“可导电区域”。在后述的实施方式的附图中也是如此。此外,图25考虑到接地端子517的内部布线形成于传感器主体511的点而记作R1=R2。
另外,在接地端子517与下侧集磁部401抵接的情况下,接地端子517与下侧集磁部401的距离为0。因此,在该抵接位置下侧集磁环40与接地端子517最接近,该抵接位置为下侧集磁环40与接地端子517的距离最短的位置。
具体而言,上侧集磁部301的前端部303形成为比传感器主体511的端子形成面513靠上侧基部38侧。
另一方面,在下侧集磁部401的与接地端子517对应的位置,形成从端子形成面513向端子基板61侧突出的释放部405。详细而言,如图7所示,从下侧观察时释放部405形成在至少一部分与接地端子517重叠的位置。释放部405向接地端子517侧折弯。向接地端子517侧折弯而形成的弯曲部406与接地端子517抵接。弯曲部406和接地端子517可以是仅抵接的状态,也可以通过软钎焊接、熔焊等以能够导电的方式连接。通过使释放部405折弯并与接地端子517抵接,与端子基板61的距离无关地,能够相对较小地形成释放部405。
在本实施方式中,释放部405的宽度比接地端子517的宽度宽,但也可以比接地端子517的宽度窄,也可以在能够确保与输出端子515以及电源端子516的绝缘的程度的范围内,比接地端子517的宽度宽。
对于第二实施方式的释放部415也是如此。
在本实施方式中,释放部405和端子基板61分离。
基于图8对传递静电能量的路径进行说明。图8是将检测装置21和电路图组合而成的示意图。在图8中,用符号S表示静电。
在本实施方式中,在下侧集磁环40的集磁部401形成释放部405,并与接地端子517抵接。因此,静电能量不通过传感器主体511地从接地端子517传导至下侧集磁环40,并且将下侧集磁环40和立柱75之间介电击穿,并释放到立柱75。
另外,在本实施方式中,设置有防噪音元件71,输出端子515和电源端子516经由防噪音元件71与接地端子517电连接。因此,在输出端子515或者电源端子516被施加静电的情况下,静电能量经由防噪音元件71到达接地端子517,与接地端子517被施加静电的情况相同,释放到立柱75。
对于噪声,也以相同的路径释放到立柱75侧。
由此,能够确保在传感器元件512中能够检测磁通量的状态,并且保护传感器部51免受静电以及噪声的影响。
如以上说明的那样,检测装置21具备下侧集磁环40、上侧集磁环30以及传感器部51。
下侧集磁环40被设置为能够与为接地电位的立柱75导电。
上侧集磁环30的至少一部分与下侧集磁环40对置配置。
传感器部51具有传感器元件512、传感器主体511以及接地端子517。传感器元件512配置于在下侧集磁环40与上侧集磁环30之间且下侧集磁环40与上侧集磁环30之间的距离最短的传感器配置区域。传感器主体511密封传感器元件512。接地端子517从传感器主体511突出并接地。
下侧集磁环40在与传感器配置区域为不同区域的可导电区域,被设置为能够与接地端子517导电。
由此,由于静电能量以及噪声不经由传感器主体511地释放到立柱75侧,所以能够防止由静电引起的传感器部51的受损、由噪声引起的传感器的误动作。另外,能够省去为了防止静电、噪声而设置的单独的部件或传感器部51内部的用于应对静电、噪声的结构,而能够使装置简单化。
另外,静电能量以及噪声不通过传感器主体511,就能够适当地检测上侧集磁环30与下侧集磁环40之间的电磁信号。换言之,可以说在本实施方式中,通过积极地形成比经由传感器主体511电阻值低的路径,防止静电能量通过传感器主体511,而保护传感器主体511。另外,可以说通过积极地形成与经由传感器主体511的位置分开的电容耦合,防止噪声传递至传感器主体511,并防止传感器部51的误动作、误检测。
下侧集磁环40具有下侧基部48和从下侧基部48突出形成的下侧集磁部401。
上侧集磁环30具有上侧基部38和上侧集磁部301。上侧集磁部301从上侧基部38突出,并与下侧集磁部401对置。
传感器配置区域是下侧集磁部401和上侧集磁部301对置的位置。传感器元件512检测下侧集磁部401与上侧集磁部301之间的磁通量。
由此,能够适当地检测下侧集磁部401与上侧集磁部301之间的磁通量。
在下侧集磁部401形成向与下侧基部48相反侧突出的释放部405。释放部405的前端向接地端子517侧折弯,并且释放部405被设置为能够与接地端子517导电。在本实施方式中,释放部405和接地端子517以能够导电的方式抵接。
由此,能够使静电能量、噪声经由接地端子517适当地释放到立柱75侧。
扭矩传感器10具备检测装置21。传感器元件512检测与施加在输入轴921和输出轴922之间的扭矩相应的磁通量。
由此,扭矩传感器10能够适当地检测输入轴921和输出轴922之间的扭矩。
在本实施方式中,下侧集磁环40对应于“导电部件”,下侧基部48对应于“第一基部”,上侧集磁环30对应于“对置部件”,上侧基部38对应于“第二基部”。第二实施方式~第五实施方式也是如此。另外,下侧集磁部401对应于“第一集磁部”,上侧集磁部301对应于“第二集磁部”。
这里,本说明书中的“被设置为能够导电”并不限于下侧集磁环40和接地端子517抵接的情况以及下侧集磁环40和接地端子517通过钎焊、熔焊等电连接的情况,也包含在下侧集磁环40与接地端子517之间形成有因介电击穿、电容耦合等而能够传递静电、噪声的程度的微小间隙的情况。另外,若能够传递静电、噪声,例如也可以在微小间隙配置绝缘片、抗蚀剂图案等其它部件。对于下侧集磁环40和立柱75也是如此。
对于后述的实施方式也是如此。补充一下,也可以代替下侧集磁环为上侧集磁环。另外,也可以代替接地端子,为接地端子连接部617或接地图案等。
(第二实施方式)
将本公开的第二实施方式示于图9和图10。
在本实施方式的检测装置22的下侧集磁环41形成2个下侧集磁部411。下侧集磁环41除了集磁部411的形状不同的点以外,与上述实施方式的下侧集磁环40相同。
下侧集磁部411的释放部415在与接地端子517对应的位置向端子基板61侧延伸形成,前端部416与接地端子连接部617抵接。在本实施方式中,释放部415与接地端子连接部617的抵接位置对应于“可导电区域”。
释放部415和接地端子517分离。
在本实施方式中,释放部415向与第一基部48相反侧延伸形成,在前端部416,被设置为能够与接地端子连接部617导电。在本实施方式中,释放部415和接地端子连接部617以能够导电的方式抵接。
即使这样构成,也能够使静电、噪声不经由传感器主体511,而经由接地端子连接部617以及下侧集磁环41适当地释放到立柱75侧。另外,由于也可以不使释放部415折弯,所以加工变得容易。
另外,起到与上述实施方式相同的效果。
在本实施方式中,下侧集磁环41对应于“导电部件”,下侧集磁部411对应于“第一集磁部”。另外,接地端子连接部617对应于“接地布线部”。
(第三实施方式)
将本公开的第三实施方式示于图11和图12。
在本实施方式的检测装置23的下侧集磁环42形成2个下侧集磁部421。下侧集磁环42除了集磁部421的形状不同的点以外,与上述实施方式的下侧集磁环40相同。
下侧集磁部421整体向端子基板61侧延伸形成。换言之,如图12所示,在从下侧观察时,下侧集磁部421与输出端子515、电源端子516以及接地端子517重叠地形成。在下侧集磁部421的前端部422和端子基板61之间形成微小间隙Lg。微小间隙Lg在通常时能够使下侧集磁部421和端子基板61绝缘,并被形成为在施加静电时能够因静电能量被介电击穿的程度或者能够形成噪声能够通过的电容耦合的程度。另外,配置于两端的输出端子515或者电源端子516与配置于正中间的接地端子517的距离亦即端子间距离Lt被形成为不能因静电被介电击穿的大小。即,微小间隙Lg与端子间距离Lt相比充分小。
在本实施方式中,传感器部51还具有从传感器主体511突出并与接地端子517独立设置的非接地端子亦即输出端子515和电源端子516。从下侧集磁部421侧观察,下侧集磁部421被形成为将输出端子515、电源端子516以及接地端子517分别覆盖至少一部分,并设置为在前端部422能够与包含接地端子连接部617以及输出端子连接部615及电源端子连接部616的端子基板61导电。
在前端部422和端子基板61之间,形成微小间隙Lg。
在施加静电时,端子515、516、517与下侧集磁部421之间由于静电能量被介电击穿,所以静电能量经由下侧集磁环42适当地释放到立柱75。另外,噪声经由下侧集磁部421与端子基板61之间的电容耦合释放到立柱75侧。另外,在本实施方式中,由于下侧集磁部421覆盖传感器部51的所有端子515~517,所以即使在任一端子被施加了静电、噪声的情况下,静电、噪声也经由下侧集磁环42释放到立柱75侧。由此,即使在没有防噪音元件71的情况下,也能够使静电、噪声不经由传感器主体511适当地释放。
另外,起到与上述实施方式相同的效果。
在本实施方式中,下侧集磁环42对应于“导电部件”,下侧集磁部421对应于“第一集磁部”,接地端子连接部617对应于“接地布线部”,输出端子连接部615以及电源端子连接部616对应于“非接地布线部”。另外,下侧集磁部421和端子基板61对置的位置对应于“可导电区域”。
(第四实施方式)
将本公开的第四实施方式示于图13~图15。
本实施方式是第三实施方式的变形例,在检测装置24中,在下侧集磁部421和端子基板61之间设置绝缘片49。绝缘片49在通常时能够时下侧集磁部421和端子基板61绝缘,在施加静电时能够因静电能量被介电击穿或者能够形成噪声能够通过的电容耦合。
通过设置绝缘片49,能够适当地确保下侧集磁部421与端子基板61之间的微小间隙Lg。
另外,起到与上述实施方式相同的效果。
(第五实施方式)
将本公开的第五实施方式示于图16~图18。此外,在图17等中,用点划线表示表面的抗蚀剂正下方层的电路图案。
在本实施方式的检测装置25中,在作为印刷电路基板的1张基板65的同一面安装有2个传感器部53的点与上述实施方式不同。传感器部53配置在上侧集磁环30的集磁部301与下侧集磁环43的下侧集磁部431之间,检测集磁部401与集磁部431间的磁通量的变化。下侧集磁环43的下侧集磁部431的形状等与上述实施方式不同,但其它的结构与上述实施方式的下侧集磁环40相同。对于下侧集磁部431在下文中描述。
如图17所示,2个传感器部53以并排的状态安装于基板65的元件安装面651。各个传感器部53具有传感器主体531、传感器元件532、外侧端子组533以及内侧端子组534。传感器主体531形成为在俯视时大致呈矩形,密封传感器元件532。
传感器元件532与上述实施方式的传感器元件512同样地为霍尔元件等磁检测元件,设置于从元件安装面651侧观察时集磁部301与集磁部431重叠的区域。在本实施方式中,传感器部53具有2个传感器元件532。传感器元件532与上述实施方式同样地配置于集磁部301与集磁部431最接近的位置。由此,能够适当地检测上侧集磁部301与下侧集磁部431之间的磁通量的变化。
外侧端子组533形成于传感器主体531的一个长边,内侧端子组543形成于传感器主体531的另一个长边。
外侧端子组533包含输出端子535、电源端子536以及接地端子537。输出端子535、接地端子537、电源端子536依次排列,在各端子间配置空引脚。在本实施方式中,端子组533、534均由8个端子构成,但端子数可以是任意数量。另外,端子排列也可以是任意的。对于后述的实施方式也是如此。
输出端子535与在基板65的元件安装面651侧的抗蚀剂659的正下方的层形成的输出图案655连接,用于传感器部53的检测信号的输出。检测信号被输出至ECU85。
电源端子536与在基板65的元件安装面651侧的抗蚀剂659的正下方的层形成的电源图案656连接,并与设置于ECU85的未图示的作为调节器等的供电部连接。
接地端子537与形成于基板65的元件安装面651侧的抗蚀剂659的正下方的层的接地图案657连接,并经由ECU85接地。
另外,防噪音元件72安装于基板65的元件安装面651侧,与输出图案655和接地图案657、或者电源图案656和接地图案657连接。防噪音元件72与防噪音元件71相同,是电容器、齐纳二极管等。
在基板65形成在基部38、基部48侧开口的2个切口部653。切口部653对应各个传感器部53的安装位置来设置,并被形成为在从基板65的上侧观察时,切口部653的至少一部分与传感器主体531重叠。传感器部53被安装为覆盖切口部653。在切口部653分别插入集磁部431。通过向切口部653插入集磁部431,与未形成切口部653且上侧集磁部301和下侧集磁部431以隔着基板65的状态对置的情况相比,集磁部301与集磁部431的距离缩短,所以检测精度提高。
在传感器部53中,将与集磁环30、集磁环43的基部38、基部48相反侧的端部作为前端部539。
在本实施方式中,上侧集磁部301的前端部303比传感器部53的前端部539更靠基部38侧。
下侧集磁部431的前端部439比传感器部53的前端部539向与基部48相反侧延伸形成,在切口部653的最里部与基板65抵接。在切口部653的最里部,接地图案663露出。由此,下侧集磁环43与接地图案663电连接。
由此,与第一实施方式等相同,静电以及噪声不通过传感器主体531,经由接地图案663和下侧集磁环43释放到立柱75。
在本实施方式中,下侧集磁部431的前端部439与接地图案663的抵接位置对应于“可导电区域”。
本实施方式的传感器部53表面安装于基板65。在基板65设置有作为接地布线部的接地图案657、663。接地图案657与接地图案663电连接。在后述的实施方式中,接地图案对应于“接地布线部”。
上侧集磁部301配置于传感器部53的安装上表面侧。下侧集磁部431插入形成于基板65的切口部653。
通过将下侧集磁部431插入切口部653,与不插入切口部653中的情况相比,能够使上侧集磁部301和下侧集磁部431接近。由此,能够更加适当地检测上侧集磁部301与下侧集磁部431之间的磁通量。
下侧集磁部431被插入切口部653,并被设置为在该切口部652的内部能够与接地图案663导电。在本实施方式中,下侧集磁部431以能够与在切口部653的最里部露出的接地图案663导电的方式与其抵接。
即使这样构成也起到与上述实施方式相同的效果。另外,由于下侧集磁部431的形状简单,所以容易加工。
在本实施方式中,下侧集磁环43对应于“导电部件”,下侧集磁部431对应于“第一集磁部”,上侧集磁环30对应于“对置部件”。
(第六实施方式)
将本公开的第六实施方式示于图19和图20。
在检测装置26的上侧集磁环31形成2个上侧集磁部311。另外,在下侧集磁环44形成2个下侧集磁部441。除了集磁部311、集磁部441的形状等不同的点以外,集磁环31、集磁环44的功能等与上述实施方式相同。另外,基板67除了布线图案以外,与上述实施方式的基板65相同。
下侧集磁部441的前端部449比传感器部53的前端部539更靠基部48侧。
上侧集磁部311的前端部312与传感器部53的前端部539相比向与基部38相反侧延伸形成,并向基板67侧折弯而与基板67的元件安装面671抵接。
在基板67中,接地图案677在与上侧集磁部311的前端部312的抵接位置露出。因此,上侧集磁环30与接地图案677电连接。由此,静电以及噪声不通过传感器主体531而经由接地图案677和上侧集磁环31释放到立柱75侧。
在本实施方式中,上侧集磁部311的前端部312与接地图案677的抵接位置对应于“可导电区域”。
在图20中,接地图案677被形成为比前端部312的抵接区域大,但只要被形成为至少一部分与前端部312的抵接区域重叠,则也可以比抵接区域小。另外,上侧集磁部311的前端部312和基板67可以仅抵接,也可以通过软钎焊接等以能够导电的方式连接。
配置于传感器部53的安装上表面侧的上侧集磁部311延伸到传感器部53的外侧的区域,且前端部312向基板67侧折弯而形成,并被设置为能够与接地图案677导电。在本实施方式中,前端部312与在元件安装面671露出的接地图案677以能够导电的方式抵接。
即使这样构成也起到与上述实施方式相同的效果。另外,由于使上侧集磁部311抵接于基板67的元件安装面671即可,所以容易组装。
在本实施方式中,上侧集磁环31对应于“导电部件”,上侧基部38对应于“第一基部”,上侧集磁部311对应于“第一集磁部”。另外,下侧集磁环44对应于“对置部件”,下侧基部48对应于“第二基部”,下侧集磁部441对应于“第二集磁部”。
(第七实施方式)
将本公开的第七实施方式示于图21和图22。
本实施方式的检测装置27的集磁环31、集磁环44与第六实施方式相同,基板65与第五实施方式相同。此外,在切口部653的最里部,接地图案663(在图21~图24中未图示。)也可以不露出。对于第八实施方式也是如此。
在本实施方式中,在基板65中,在与上侧集磁部311的前端部312的抵接位置形成有抗蚀剂659。抗蚀剂659为能够因静电被介电击穿或者能够形成噪声能够通过的电容耦合的程度。
在抗蚀剂659的正下方的层的前端部312的抵接区域内,形成输出图案655、电源图案656以及接地图案657。由此,与第三实施方式相同地,即使在任一端子被施加了静电或者噪声的情况下,静电能量也经由上侧集磁环31释放到立柱75。
前端部312被设置为能够与形成于基板65的安装传感器部53侧的面亦即元件安装面651的抗蚀剂659的正下方的层的接地图案657以及接地图案以外的非接地图案亦即输出图案655和电源图案656导电。
由此,即使在没有防噪音元件72的情况下,也能够使静电或者噪声不经由传感器主体531就适当地释放到立柱75侧。
在本实施方式中,输出图案655和电源图案656对应于“非接地图案”。
(第八实施方式)
将本公开的第八实施方式示于图23和图24。此外,在图24中,省略了电路图案以及防噪音元件等的记载。
本实施方式的检测装置28的传感器部55的端子排列以及上侧集磁环32的上侧集磁部321的形状不同。
传感器部55具有传感器主体531、第一端子组553以及第二端子组554。在本实施方式中,将从输入轴921侧(即图24的纸面近前侧)观察时的传感器主体531的右侧设为第一端子组553,左侧设为第二端子组554。
在本实施方式中,上侧集磁环32的上侧集磁部321的前端部329以及下侧集磁环44的下侧集磁部441的前端部449均比传感器主体531的前端部539靠基部38、基部48侧。
在本实施方式中,第一端子组553中的从前端部539侧起第四个端子以及第二端子组554中的从前端部539侧起第三个端子是接地端子557。也可以对第一端子组553和第二端子组554的任一端子分配接地端子557。另外,也可以省略第一端子组553或者第二端子组554的一方的接地端子557。
这里,将相对于上侧集磁部321从上侧基部38突出的方向垂直的方向(在图24的纸面上为左右方向)设为宽度方向。
在上侧集磁部321中,在与接地端子557对应的位置形成向宽度方向突出的突出部323。突出部323向基板65侧折弯,与接地端子557抵接。突出部323和接地端子557可以仅抵接,也可以通过软钎焊接等以能够导电的方式连接。
在本实施方式中,配置于传感器部55的安装上表面侧的上侧集磁部321的突出部323被设置为能够与接地端子557导电。
由此,与上述实施方式相同,静电以及噪声不通过传感器主体531地从接地端子557传递至上侧集磁环32,并释放到立柱75侧。另外,由于突出部323能够相对较小地形成,所以能够抑制上侧集磁环32的形成所需要的材料的使用量。
另外,起到与上述实施方式相同的效果。
在本实施方式中,上侧集磁环32对应于“导电部件”,上侧基部38对应于“第一基部”,上侧集磁部321对应于“第一集磁部”。
(其他实施方式)
(a)集磁环
在第一实施方式~第四实施方式中,构成为使静电或者噪声经由下侧集磁环释放到立柱侧。在其他实施方式中,也可以构成为交换上侧集磁环和下侧集磁环,使静电或者噪声经由上侧集磁环释放到立柱侧。换言之,用于释放静电或者噪声的结构也可以设置于上侧集磁环。该情况下,上侧集磁环对应于“导电部件”,下侧集磁环对应于“对置部件”。
在第五实施方式中,在切口部的最里部,下侧集磁部和接地图案被设置为能够导电。在其他实施方式中,也可以在切口部的侧面侧,下侧集磁部和接地图案被设为能够导电。
在第六实施方式以及第七实施方式中,上侧集磁部的前端部向与传感器部的基部相反侧延伸形成。在其他实施方式中,上侧集磁部的前端部例如也可以在与端子形成部邻接侧等基板上的传感器部的外侧的任意区域,被设为能够与接地图案导电。
在第八实施方式中,在传感器部的两侧形成突出部。在其他实施方式中,也可以对每个传感器部与一个接地端子对应地形成突出部。
(b)传感器部
在第一实施方式等中,接地端子被排列为成为输出端子和电源端子之间。在其他实施方式中,接地端子也可以设置在输出端子和电源端子之间以外的位置,端子排列可以是任意的。
在上述实施方式中,传感器元件检测集磁部间的磁通量。在其他实施方式中,传感器元件也可以检测磁通量以外的电磁信号。在上述实施方式中,对一个传感器部设置的传感器元件的数量为1个或者2个。在其他实施方式中,也可以对一个传感器部设置3个以上的传感器元件。
另外,在上述实施方式中,设置2组集磁部以及传感器部。在其他实施方式中,集磁部以及传感器部的组数并不限于2组,也可以是1组,也可以是3组以上。在集磁部以及传感器部有多组的情况下,集磁部以及传感器部的每个组合的用于释放静电或者噪声的结构也可以不同。
另外,在上述实施方式中,“以能够导电的方式抵接”的位置也可以形成因介电击穿、电容耦合等能够传递静电、噪声的程度的微小间隙。另外,若能够传递静电、噪声,例如也可以在微小间隙设置有绝缘片、抗蚀剂图案等其他部件。
(c)基板
在第五实施方式~第八实施方式中,将传感器部安装于基板,下侧集磁部插入到形成于基板的切口部。切口部在集磁环的基部侧开口。在其他实施方式中,切口部也可以不在基部侧开口。换言之,切口部也可以为与传感器部的形状相应的孔部,从与基板安装面相反侧插入下侧集磁部。另外,也可以在基板不形成切口部。
(d)接地部件
在上述实施方式中,接地部件是立柱。在其他实施方式中,释放静电或者噪声的接地部件并不限于立柱,例如也可以是检测装置的壳体等任意的部件。
(e)检测装置
上述实施方式的检测装置被应用于扭矩传感器。在其他实施方式中,也可以将检测装置应用于扭矩传感器以外的装置。另外,在上述实施方式中,扭矩传感器被应用于电动助力转向装置。在其他实施方式中,也可以将扭矩传感器应用于电动助力转向装置以外的装置。
以上,本公开完全不限于上述实施方式,能够在不脱离本公开的主旨的范围内以各种方式来实施。
本公开以实施例为基准进行了描述,但应理解为本公开并不限定于该实施例、构造。本公开也包含各种变形例、等同范围内的变形。此外,各种组合、方式、以及在这些的基础上仅包含一个要素、更多或更少的其它组合、方式也纳入到本公开的范围、思想范围内。
Claims (15)
1.一种检测装置,具备:
导电部件(31、32、40~43),被设置为能够与为接地电位的接地部件(75)导电;
对置部件(30、44),被配置为至少一部分与所述导电部件对置;以及
传感器部(51、53、55),具有传感器元件(512、532)、传感器主体(511、531)以及接地端子(517、537、557),其中,所述传感器元件被配置于所述导电部件和所述对置部件之间且所述导电部件和所述对置部件之间的距离最短的传感器配置区域,所述传感器主体密封所述传感器元件,所述接地端子从所述传感器主体突出并接地,
所述导电部件具有第一基部(38、48)以及从所述第一基部突出形成的第一集磁部(311、321、401、411、421、431),
所述对置部件具有第二基部(38、48)以及从所述第二基部突出并与所述第一集磁部对置的第二集磁部(301、441),
所述传感器配置区域是所述第一集磁部和所述第二集磁部对置的位置,
所述传感器元件检测所述第一集磁部和所述第二集磁部之间的磁通量,
在所述第一集磁部(401、411)形成向与所述第一基部相反侧突出的释放部(405、415)或者前端部(312、422、439),
所述导电部件被设置为在与所述传感器配置区域为不同区域且与所述传感器配置区域向与所述第一基部相反侧分离的可导电区域能够与所述接地端子或者与所述接地端子连接的接地布线部(617、657、663、677)导电。
2.根据权利要求1所述的检测装置,其中,
所述导电部件被设置为能够与所述接地端子或者所述接地布线部导电包括:所述导电部件与所述接地端子或者所述接地布线部抵接的情况、所述导电部件与所述接地端子或者所述接地布线部电连接的情况、以及在所述导电部件与所述接地端子或者所述接地布线部之间形成有微小间隙的情况。
3.根据权利要求1所述的检测装置,其中,
所述导电部件被设置为能够与接地部件导电包括:所述导电部件与所述接地部件抵接的情况、所述导电部件与所述接地部件电连接的情况、以及在所述导电部件与所述接地部件之间形成有微小间隙的情况。
4.根据权利要求1所述的检测装置,其中,
所述释放部(405)的前端向所述接地端子侧折弯,并且所述释放部被设置为能够与所述接地端子导电。
5.根据权利要求1所述的检测装置,其中,
所述释放部(415)向与所述第一基部相反侧延伸形成,并被设置为在前端部(416)能够与所述接地布线部(617)导电。
6.根据权利要求1所述的检测装置,其中,
所述接地布线部具有设置于基板(65、67)的接地图案(663、657、677),
所述传感器部(53、55)表面安装于所述基板,
所述第一集磁部或者所述第二集磁部的一方(301、311、321)配置于所述传感器部的安装上表面侧,
所述第一集磁部或者所述第二集磁部的另一方(431、441)被插入于形成在所述基板的切口部(653)。
7.根据权利要求6所述的检测装置,其中
所述第一集磁部(431)被插入于所述切口部,并被设置为能够在该切口部的内部与所述接地图案(663)导电。
8.根据权利要求6所述的检测装置,其中,
所述第一集磁部(311)配置于所述传感器部的安装上表面侧,并且延伸到所述传感器部的外侧的区域,
所述第一集磁部的前端部(312)向所述基板侧折弯而形成,并被设置为能够与所述接地图案(657、677)导电。
9.根据权利要求6所述的检测装置,其中,
所述第一集磁部(321)配置于所述传感器部的安装上表面侧,
所述第一集磁部的突出部(323)被设置为能够与所述接地端子(557)导电。
10.根据权利要求1所述的检测装置,其中,
所述接地布线部(617)是端子基板(61)的一部分,
所述传感器部还具有非接地端子(515、516),所述非接地端子从所述传感器主体突出并与所述接地端子独立设置,
所述非接地端子与所述端子基板的非接地布线部(615、616)连接,
所述第一集磁部被形成为从该第一集磁部侧观察时将所述接地端子以及所述非接地端子分别覆盖至少一部分,
在所述第一集磁部的前端部(422)与所述端子基板之间形成有微小间隙。
11.根据权利要求10所述的检测装置,其中,
所述微小间隙的宽度为在施加静电时因静电能量被介电击穿的程度或者形成噪声能够通过的电容耦合的程度。
12.根据权利要求10所述的检测装置,其中,
在所述微小间隙设置有绝缘片(49),
所述绝缘片在施加静电时因静电能量被介电击穿或者形成噪声能够通过的电容耦合。
13.根据权利要求1所述的检测装置,其中,
所述传感器部表面安装在基板(65)的元件安装面(651)上,
所述第一集磁部配置于所述传感器部的安装上表面侧,并且延伸到所述传感器部的外侧的区域,
所述第二集磁部被插入于形成在所述基板的切口部(653),
所述第一集磁部的前端部(312)向所述基板侧折弯,并且与所述元件安装面抵接,
在所述基板的所述元件安装面的下方的层,设置有与所述接地端子连接的接地图案(657)以及所述接地图案以外的非接地图案(655、656),
在所述前端部与所述接地图案以及非接地图案之间设置有抗蚀剂(659)。
14.根据权利要求13所述的检测装置,其中,
所述抗蚀剂在施加静电时因静电能量被介电击穿或者形成噪声能够通过的电容耦合。
15.一种扭矩传感器,该扭矩传感器具备权利要求1~14中任一项所述的检测装置,
所述传感器元件检测与施加在第一轴(921)和第二轴(922)之间的扭矩相应的磁通量。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-251609 | 2015-12-24 | ||
| JP2015251609 | 2015-12-24 | ||
| JP2016152636A JP6390674B2 (ja) | 2015-12-24 | 2016-08-03 | 検出装置、および、トルクセンサ |
| JP2016-152636 | 2016-08-03 | ||
| PCT/JP2016/087720 WO2017110715A1 (ja) | 2015-12-24 | 2016-12-19 | 検出装置、および、トルクセンサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108431567A CN108431567A (zh) | 2018-08-21 |
| CN108431567B true CN108431567B (zh) | 2021-02-05 |
Family
ID=59272093
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680075360.5A Active CN108431567B (zh) | 2015-12-24 | 2016-12-19 | 检测装置以及扭矩传感器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10712215B2 (zh) |
| EP (1) | EP3396343B1 (zh) |
| JP (1) | JP6390674B2 (zh) |
| KR (1) | KR102093679B1 (zh) |
| CN (1) | CN108431567B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102562495B1 (ko) * | 2018-08-31 | 2023-08-02 | 에이치엘만도 주식회사 | Esd 보호 구조를 가지는 비접촉식 센서 장치 |
| KR102553725B1 (ko) * | 2018-08-31 | 2023-07-11 | 에이치엘만도 주식회사 | Esd 보호 구조를 가지는 비접촉식 센서 장치 |
| DE102019214170B3 (de) * | 2019-09-18 | 2021-03-11 | Robert Bosch Gmbh | Lenkvorrichtung mit einer Ableitstruktur zur Ableitung einer elektrostatischen Ladung |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1544578A2 (en) * | 2003-12-18 | 2005-06-22 | Hitachi, Ltd. | Rotation angle sensor |
| EP1764594A1 (en) * | 2004-05-17 | 2007-03-21 | JTEKT Corporation | Torque detection device |
| JP2007218789A (ja) * | 2006-02-17 | 2007-08-30 | Jtekt Corp | トルク検出装置 |
| JP2008233040A (ja) * | 2007-03-23 | 2008-10-02 | Jtekt Corp | トルク検出装置 |
| CN102192803A (zh) * | 2010-03-12 | 2011-09-21 | 株式会社电装 | 传感器单元和磁通量集中模块 |
| CN103900748A (zh) * | 2012-12-25 | 2014-07-02 | 株式会社捷太格特 | 转矩检测装置、以及具备该转矩检测装置的转向装置 |
| EP2957882A1 (en) * | 2014-06-18 | 2015-12-23 | Jtekt Corporation | Torque sensor and electric power steering system |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001230023A (ja) | 2000-02-16 | 2001-08-24 | Funai Electric Co Ltd | コネクタの静電気防止用シャッター |
| JP2001308586A (ja) | 2000-04-24 | 2001-11-02 | Sony Corp | 電子機器 |
| JP3874642B2 (ja) | 2001-05-18 | 2007-01-31 | 株式会社デンソー | トルクセンサ及びこのトルクセンサを具備する電動パワーステアリング装置 |
| DE10222118B4 (de) | 2001-05-18 | 2006-10-05 | Denso Corp., Kariya | Drehmomentsensor und elektrisches Servolenkungssystem mit Drehmomentsensor |
| US6701792B2 (en) * | 2001-08-27 | 2004-03-09 | Visteon Global Technologies, Inc. | Torque sensing apparatus for measuring relative torque between two shafts |
| JP2005201898A (ja) * | 2003-12-18 | 2005-07-28 | Hitachi Ltd | 変位検出装置 |
| JP4513389B2 (ja) | 2004-04-09 | 2010-07-28 | 株式会社村田製作所 | 多層配線基板及びその製造方法 |
| JP4878747B2 (ja) * | 2004-11-04 | 2012-02-15 | 光洋電子工業株式会社 | トルクセンサ |
| JP4483552B2 (ja) | 2004-11-30 | 2010-06-16 | Tdk株式会社 | サージ吸収回路 |
| JP4449838B2 (ja) | 2005-06-30 | 2010-04-14 | Tdk株式会社 | サージ吸収回路 |
| EP1662610B1 (en) | 2004-11-30 | 2014-03-26 | TDK Corporation | Surge absorption circuit |
| JP3959091B2 (ja) | 2004-12-15 | 2007-08-15 | Tdk株式会社 | サージ吸収回路 |
| JP4449834B2 (ja) | 2005-06-24 | 2010-04-14 | Tdk株式会社 | サージ吸収回路 |
| JP4645520B2 (ja) * | 2006-04-28 | 2011-03-09 | 株式会社デンソー | 回転角度検出装置 |
| JP2008028214A (ja) | 2006-07-24 | 2008-02-07 | Matsushita Electric Ind Co Ltd | 静電気対策回路 |
| JP2008216129A (ja) | 2007-03-06 | 2008-09-18 | Jtekt Corp | トルク検出装置 |
| JP2009038095A (ja) | 2007-07-31 | 2009-02-19 | Hitachi Metals Ltd | 高周波モジュール |
| JP2011203091A (ja) * | 2010-03-25 | 2011-10-13 | Jtekt Corp | トルク検出装置及び電動パワーステアリング装置 |
| JP2011258916A (ja) | 2010-05-13 | 2011-12-22 | Citizen Holdings Co Ltd | 半導体発光装置 |
| JP2011253924A (ja) | 2010-06-02 | 2011-12-15 | Citizen Holdings Co Ltd | 半導体発光素子 |
| JP2013239697A (ja) | 2012-04-16 | 2013-11-28 | Fuji Electric Co Ltd | 半導体装置 |
| JP2013235152A (ja) | 2012-05-09 | 2013-11-21 | Mitsubishi Electric Corp | 画像表示パネル用fpc |
| JP5942613B2 (ja) * | 2012-06-05 | 2016-06-29 | 株式会社ジェイテクト | センサ装置 |
| JP5688691B2 (ja) | 2012-11-15 | 2015-03-25 | 株式会社デンソー | 検出装置、及びトルクセンサ |
| JP5921483B2 (ja) | 2013-04-05 | 2016-05-24 | 三菱電機株式会社 | 表示装置 |
| JP2014215176A (ja) * | 2013-04-25 | 2014-11-17 | 株式会社デンソー | 回転検出装置 |
-
2016
- 2016-08-03 JP JP2016152636A patent/JP6390674B2/ja active Active
- 2016-12-19 CN CN201680075360.5A patent/CN108431567B/zh active Active
- 2016-12-19 KR KR1020187020718A patent/KR102093679B1/ko active IP Right Grant
- 2016-12-19 US US16/064,162 patent/US10712215B2/en active Active
- 2016-12-19 EP EP16878604.4A patent/EP3396343B1/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1544578A2 (en) * | 2003-12-18 | 2005-06-22 | Hitachi, Ltd. | Rotation angle sensor |
| EP1764594A1 (en) * | 2004-05-17 | 2007-03-21 | JTEKT Corporation | Torque detection device |
| JP2007218789A (ja) * | 2006-02-17 | 2007-08-30 | Jtekt Corp | トルク検出装置 |
| JP2008233040A (ja) * | 2007-03-23 | 2008-10-02 | Jtekt Corp | トルク検出装置 |
| CN102192803A (zh) * | 2010-03-12 | 2011-09-21 | 株式会社电装 | 传感器单元和磁通量集中模块 |
| CN103900748A (zh) * | 2012-12-25 | 2014-07-02 | 株式会社捷太格特 | 转矩检测装置、以及具备该转矩检测装置的转向装置 |
| EP2957882A1 (en) * | 2014-06-18 | 2015-12-23 | Jtekt Corporation | Torque sensor and electric power steering system |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3396343B1 (en) | 2021-10-06 |
| JP6390674B2 (ja) | 2018-09-19 |
| EP3396343A4 (en) | 2019-01-02 |
| JP2017120249A (ja) | 2017-07-06 |
| US10712215B2 (en) | 2020-07-14 |
| EP3396343A1 (en) | 2018-10-31 |
| US20180372567A1 (en) | 2018-12-27 |
| KR20180095060A (ko) | 2018-08-24 |
| KR102093679B1 (ko) | 2020-03-26 |
| CN108431567A (zh) | 2018-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6880411B2 (en) | Torque sensor and electric power steering system having same | |
| JP3970852B2 (ja) | シャフトに加えられるトルクを測定する装置 | |
| CN108431567B (zh) | 检测装置以及扭矩传感器 | |
| JP6217609B2 (ja) | 磁気検出装置、および、これを用いたトルクセンサ | |
| US9970834B2 (en) | Torque sensor and electric power steering system | |
| EP1619507B1 (en) | Rotation sensor | |
| JP6354570B2 (ja) | センサユニット、および、これを用いた集磁モジュール | |
| US11860053B2 (en) | Torque sensor device, method for determining a torque, stator and stator arrangement | |
| JP2011191094A (ja) | センサユニット及び、集磁モジュール | |
| US11187601B2 (en) | Sensor device | |
| CN113167665B (zh) | 扭矩传感器装置和机电转向系统 | |
| US11336153B2 (en) | Motor | |
| US11035745B2 (en) | Torque sensor | |
| JP2007292678A (ja) | 接地付センサ軸受及び回路基板の接地パターンと筐体との接続方法 | |
| US9857201B2 (en) | Onboard detector | |
| WO2017110715A1 (ja) | 検出装置、および、トルクセンサ | |
| JP5704352B2 (ja) | 電流センサ | |
| US11808648B2 (en) | Magnetic sensor and torque sensing device having the same | |
| JP7322811B2 (ja) | 磁気センサ、トルク検出装置、ステアリング装置 | |
| JP2024045900A (ja) | 回路基板及びトルクセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |