CN107888645B - 车载通信网络 - Google Patents
车载通信网络 Download PDFInfo
- Publication number
- CN107888645B CN107888645B CN201710827104.3A CN201710827104A CN107888645B CN 107888645 B CN107888645 B CN 107888645B CN 201710827104 A CN201710827104 A CN 201710827104A CN 107888645 B CN107888645 B CN 107888645B
- Authority
- CN
- China
- Prior art keywords
- message
- bus
- messages
- node
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40013—Details regarding a bus controller
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40052—High-speed IEEE 1394 serial bus
- H04L12/40078—Bus configuration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40143—Bus networks involving priority mechanisms
- H04L12/40163—Bus networks involving priority mechanisms by assigning priority to messages according to a message field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
- B60W2050/009—Priority selection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L47/00—Traffic control in data switching networks
- H04L47/10—Flow control; Congestion control
- H04L47/24—Traffic characterised by specific attributes, e.g. priority or QoS
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/50—Network services
- H04L67/56—Provisioning of proxy services
- H04L67/568—Storing data temporarily at an intermediate stage, e.g. caching
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Small-Scale Networks (AREA)
- Bus Control (AREA)
- Information Transfer Systems (AREA)
Abstract
一种车载通信网络,包括第一总线、第二总线以及连接至第一总线和第二总线的多个节点。第一总线符合诸如CAN的通信协议。所述多个节点中的至少一个节点执行向第一总线发送消息的处理。所述至少一个节点包括:第一发送处理单元,其针对每一消息对在第一总线上来自另一节点的消息优先于来自所述至少一个节点的消息的次数进行计数;第二发送处理单元,其执行向第二总线发送消息的处理;以及总线改变处理单元,当产生了使得计数器值超过预定值的一个消息时,总线改变处理单元将该一个消息发送至第一发送处理单元以外的第二发送处理单元。
Description
技术领域
本发明涉及车载通信网络。
背景技术
已知,车载通信网络设置有仲裁单元,仲裁单元使具有特定优先级的消息的发送在具有针对每一特定优先级确定的比率的特定周期内优先于任何其他消息的发送,车载通信网络包括符合以下通信协议的总线,所述通信协议使得在节点之间具有相对高优先级的消息的发送优先于具有相对低优先级的消息的发送(例如,参见公开号为第2003-030134号的日本未审查专利申请)。
发明内容
在符合这样的通信协议的总线中,当分别具有相对高优先级的消息A从某一节点N1被连续地发送时,来自另一节点N2的具有相对低优先级的消息B的发送可能在相对长时间内不能完成。这样的情况导致以下缺点。当具有相对高优先级的消息C在其他节点N2中的消息B之后等待时,即使消息C的优先级高于消息A的优先级,消息C的发送在相对长时间内也可能不能完成(由于消息B的发送没有完成的事实)。具有相对高优先级的消息C的发送在相对长时间内不能完成的情况影响经由车载通信网络构建的车辆系统的稳健操作。
在相关技术中,因为优先级以特定周期实质性改变,所以车辆系统的稳健操作由于具有相对低优先级的消息而被削弱。由于优先级由设计者考虑车辆系统的鲁棒性进行设置,因此优先级的实质改变影响车辆系统的稳健操作。
本发明的一方面是降低具有相对低优先级的消息对车辆系统的稳健操作的影响。
本发明的一方面涉及车载通信网络,其包括:第一总线;第二总线;以及连接至第一总线和第二总线的多个节点。节点中的至少一个节点包括:第一发送处理单元,其被配置成执行向第一总线发送消息的处理。在第一总线上,在节点之中,具有相对高优先级的消息的发送优先于具有相对低优先级的消息的发送。第一发送处理单元被配置成:通过使用具有不同优先级的多个消息作为对象来执行向第一总线发送消息的处理;针对每一消息确定来自另一节点的消息在第一总线上是否优先于来自至少一个节点的消息,其中,所述另一节点是所述节点中的至少一个节点以外的节点;以及对来自另一节点的消息优先于来自至少一个节点的消息的次数进行计数。至少一个节点还包括:第二发送处理单元,其被配置成执行向第二总线发送消息的处理;以及总线改变处理单元,其被配置成,当产生了使得来自其他节点的消息优先于来自至少一个节点的消息的次数超过预定值的一个消息时,执行对总线进行改变以使得消息从第一发送处理单元以外的第二发送处理单元向第二总线进行发送的处理。
根据本发明的该方面,第一发送处理单元针对每一消息对自另一节点的消息在第一总线上优先于来自至少一个节点的消息的次数(即,低优先级确定的次数)进行计数。利用该车载通信网络,可以单独地评估消息的低优先级确定状态。当产生了使得计数得到超过预定值的低优先级确定的次数的一个消息(滞留消息)时,总线改变处理单元通过第二发送处理单元向第二总线发送该一个消息。利用该车载通信网络,当具有相对低优先级的消息(下文中称为“低优先级消息”)被滞留多达超过预定值的次数时,可以向第二总线发送该低优先级消息。利用该车载通信网络,当在低优先级消息之后存在具有相对高优先级的消息(下文中称为“高优先级消息”)时,可以相对早地在第一总线上执行该高优先级消息的发送。即,可以抑制由于低优先级消息而使得在相对长时间内不能完成高优先级消息在第一总线上发送的情况。利用该车载通信网络,可以降低低优先级消息对车辆系统的稳健操作的影响。
在根据该方面的车载通信网络中,第一发送处理单元和第二发送处理单元可以被配置成通过使用不同的消息作为对象来分别执行发送消息的处理。由第二发送处理单元执行消息发送处理的消息可以包括由于由总线改变处理单元执行的总线改变处理而被执行消息发送处理的消息以及不同于这些消息的消息。
根据该方面,由于因总线改变处理而被执行消息发送处理的消息(滞留消息)以外的消息也能够向第二总线发送,所以与仅向第二总线发送滞留消息的情况相比,可以更高效地增加能够在车载通信网络的节点之间交换的信息项的量。
在根据该方面的车载通信网络中,至少一个节点还可以包括:第一存储单元,由第一发送处理单元执行消息发送处理的消息被写入第一存储单元;以及第二存储单元,由第二发送处理单元执行消息发送处理的消息被写入第二存储单元。总线改变处理单元可以被配置成:从第一存储单元中擦除使得来自另一节点的消息优先于来自至少一个节点的消息的次数超过预定值的一个消息,并且将该一个消息写入第二存储单元。
在根据该方面的车载通信网络中,第一总线和第二总线可以符合控制器局域网络(CAN)。
利用车载通信网络,当连接不同协议之间的网络时不需要网关。
在根据该方面的车载通信网络中,在对消息分配优先级时,可以向与车辆行驶控制有关的消息分配比与用于提高便利性和热舒适性的控制有关的消息的优先级高的优先级。
在根据该方面的车载通信网络中,可以通过使用二进制数据的码串来向第一总线和第二总线发送消息。第一发送处理单元可以被配置成:检测第一总线的电位变化;以及当第一总线的电位变化与从至少一个节点发送的消息的码串不同时,确定来自另一节点的消息优先于来自至少一个节点的消息。
在根据该方面的车载通信网络中,第一发送处理单元可以配置成:确定来自至少一个节点的消息的发送是否完成;以及当发送完成时,将来自另一节点的消息优先于来自至少一个节点的消息的次数设置为0。
在根据该方面的车载通信网络中,在第二总线上,在节点之中,具有相对高优先级的消息的发送可以优先于具有相对低优先级的消息的发送。第二发送处理单元可以被配置成:通过使用具有不同优先级的多个消息作为对象来执行向第二总线发送消息的处理;针对每一消息确定来自另一节点的消息在第二总线上是否优先于来自至少一个节点的消息,其中,所述另一节点是节点中的所述至少一个节点以外的节点;以及,对来自另一节点的消息在第二总线上优先于来自至少一个节点的消息的次数进行计数。以及,总线改变处理单元被配置成:当产生了使得来自另一节点的消息在第二总线上优先于来自至少一个节点的消息的次数超过预定值的一个消息时,执行对总线进行改变以使得消息从第一发送处理单元而不是第二发送处理单元向第一总线进行发送的处理。
利用该车载通信网络,可以降低具有相对低优先级的消息对车辆系统的稳健操作的影响。
附图说明
下面将参照附图描述本发明的示例性实施方式的特征、优点以及技术和工业意义,附图中相同的附图标记表示相同的要素,并且在附图中:
图1是示出根据实施方式的车载通信网络的图;
图2是由优选协作控制器执行的处理的示意性流程图;
图3是示出根据相关技术的车载通信网络的图;
图4是示出根据相关技术的车载通信网络的图;
图5是根据本实施方式的操作示例的说明图;
图6是根据本实施方式的操作示例的说明图;
图7是根据本实施方式的操作示例的说明图;
具体实施方式
在下文中,将参照附图来详细描述实施方式。
图1是示出根据实施方式的车载通信网络100的图。
车载通信网络100包括总线71(第一总线的示例)、总线72(第二总线的示例)以及多个节点Nd1至Ndn。节点Nd1至Ndn连接至总线71、72。总线71、72二者符合以下通信协议:该通信协议使得在节点Nd1至Ndn中具有相对高优先级的消息的发送优先于具有相对低优先级的消息的发送。在本实施方式中,总线71、72二者符合控制器局域网络(CAN)。
在图1中,示出了节点Nd1至Ndn中的三个节点Nd1至Nd3。节点的数量n是任意选择的。在图1中,示出了节点Nd1至Nd3的内部硬件配置的概况。在下面的描述中,节点Nd1至Nd3具有相同的配置,因此将适当地描述作为节点的代表的节点Nd1的配置。
节点Nd1至Ndn的每一个包括:第一协议控制器11(第一发送处理单元的示例),其执行向总线71发送消息的处理;第二协议控制器12(第二发送处理单元的示例),其执行向总线72发送消息的处理;优选协作控制器13(总线改变处理单元的示例);第一随机存取存储器(RAM)111(第一存储单元的示例);以及第二RAM112(第二存储单元的示例)。
第一协议控制器11、第二协议控制器12以及优选协作控制器13的每一个可以由集成电路(IC)来实现。第一协议控制器11、第二协议控制器12以及优选协作控制器13可以由一个CAN控制器(IC)来实现。优选协作控制器13的功能可以由下面将要描述的电子控制单元(ECU)20来实现(即,可以通过由ECU 20的CPU执行的程序来实现)。
节点Nd1至Ndn的每一个还包括ECU 20。节点Nd1至Ndn的ECU 20的功能彼此不同。例如,节点Nd1至Ndn的每一个的ECU 20是以下ECU中的任意一种:控制驱动设备例如发动机的ECU、控制制动设备的ECU、控制空调设备的ECU、控制各件装备例如门锁的ECU等。节点Nd1至Ndn的ECU 20经由车载通信网络100构成车辆系统。
节点Nd1至Ndn中的任意一个节点的ECU 20通过两个总线71、72与其他ECU 20通信。具体地,节点Nd1至Ndn的每一个的ECU 20通过两个总线71、72发送和接收消息。
在本实施方式中,消息符合CAN,并且消息的CAN_ID(标识)表示消息的优先级。方便起见,通过“***h”来表示消息的CAN_ID,而且***是数字。数字越小,优先级越高。消息的数据字段中包括各种车辆信息项、各种控制信息项等。
当在总线71、72中同时发送显性(“0”)和隐性(“1”)时,显性优先于隐性。因此,高优先级消息优先于低优先级消息。具体地,CAN_ID的数字用二进制数字系统表示,并且位从最高有效位被顺序地向总线发送。当按照位位置的降序将消息在相应位位置的位互相进行比较时,在多个消息中具有位“0”的消息优先于在相同位位置具有位“1”的消息。在本实施方式中,CAN_ID的数字越小,在二进制表示中“0”的位置越向左移动。例如,当CAN_ID的数字是“9”时,二进制表示为“1001”,以及当CAN_ID的数字是“10”时,二进制表示为“1010”。因此,从最高有效位起第三个值为“0”的CAN_ID“9”优先于从最高有效位起第三个值为“1”的CAN_ID“10”。
分配至每个消息的优先级由车辆系统的设计者确定,以使得维持车辆系统需要的鲁棒性。通常,相对高优先级被分配给与车辆行驶控制(行驶、停止或者转弯)有关的消息。例如,与车辆行驶控制相关的消息是与制动力控制、驱动力控制或者转向控制有关的消息。同时,相对低优先级被分配给与用于提高便利性和热舒适性的控制(例如空调控制)有关的消息。
在下文中,将描述作为节点Nd1至Ndn中的节点的代表的节点Nd1的内部配置(第一协议控制器11、第二协议控制器12、优选协作控制器13等)。
第一协议控制器11将多个消息逐个向总线71发送。例如,第一协议控制器11在与ECU 20中指定的第一时钟同步的每一预定发送周期向总线71发送消息。第一时钟在节点Nd1至Ndn之间同步。
取决于与来自其他节点的消息的优先级的比较,由第一协议控制器11向总线71发送的消息的发送可能完成或者可能未完成。这同样适用于由第二协议控制器12向总线72发送的消息。因此,在本说明书中,表述“向总线发送消息”及其他类似表述不意味着“消息向总线的发送完成”。
要由第一协议控制器11发送的消息由节点Nd1的ECU 20产生,并且顺序地堆叠在第一协议控制器11的第一RAM 111中。在本实施方式中,要从ECU 20提供至第一RAM 111的消息包括具有不同优先级的消息。即,在具有相对高优先级的消息和具有相对低优先级的消息一起存在的状态下,多个消息被顺序地提供至第一RAM 111。第一协议控制器11根据按照消息堆叠次序的队列向总线71逐个发送堆叠在第一RAM 111中的一个或者更多个消息。当消息的发送完成时,堆叠在第一RAM 111中的消息被清除(擦除)。如下面将描述的,可以由优选协作控制器13擦除第一RAM 111中的消息。
第一协议控制器1针对每一消息对在总线71中来自其他节点的消息优先于来自自己的节点(本示例中的节点Nd1)的消息的次数进行计数。因此,在本实施方式中,第一协议控制器11包括滞留计数器114。
第一协议控制器11在每一发送周期确定来自其他节点的消息是否优先于来自自己的节点的消息。当第一协议控制器确定来自其他节点的消息优先于来自自己的节点的消息时,第一协议控制器11将滞留计数器增加“1”。第一协议控制器可以基于总线71的电位而检测到来自其他节点的消息优先于来自自己的节点的消息。即,当总线71的电位变化与来自自己的节点的消息的“0”和“1”的码串不同时,来自其他节点的消息优先于来自自己的节点的消息。当来自其他节点的消息优先于来自自己的节点的消息时,来自自己的节点的消息的发送被推迟到下一周期。在下文中,来自其他节点的消息优先于来自自己的节点的消息的状态被称为“低优先级确定”,而来自自己的节点的消息优先于来自其他节点的消息的状态被称为“高优先级确定”。当来自自己的节点的消息优先于来自其他节点的消息时,消息的发送被完成。当消息的发送完成时,滞留计数器114被清除(即,滞留计数器114的值被重置为“0”)。
第二协议控制器12向总线72逐个发送多个消息。例如,第二协议控制器12在与ECU20中指定的第二时钟同步的每一预定发送周期向总线72发送消息。第二时钟可以与第一时钟相同,或者可以与第一时钟不同。第二时钟在节点Nd1至Ndn之间同步。要由第二协议控制器12发送的消息由节点Nd1的ECU 20产生,并且被顺序地堆叠在第二协议控制器12的第二RAM 112中。如下面将描述的,下面将要描述的滞留消息可以由优选协作控制器13写入第二协议控制器12的第二RAM 112中。第二协议控制器12根据按照消息堆叠次序的队列向总线72逐个地发送堆叠在第二RAM 112中的一个或者更多个消息。当消息的发送完成时,堆叠在第二RAM 112中的消息被清除(擦除)。第一RAM 111和第二RAM 112可以由一个RAM上的分开的存储区域分别构成。
在本实施方式中,要从ECU 20提供至第二RAM 112的消息与要从ECU 20提供至第一RAM 111的消息不同。例如,要从ECU 20提供至第二RAM 112的消息是要用在与自己的节点不同的第一节点中,而要从ECU 20提供至第一RAM 111的消息是要用在与第一节点不同的第二节点中。可替选地,要从ECU 20提供至第二RAM 112的消息与要从ECU 20提供至第一RAM 111的消息是要用在相同的其他节点中,并且分别在数据字段中包括不同属性的控制信息项。如上所述,第一协议控制器11和第二协议控制器12分别通过使用第一RAM 111中堆叠的消息作为对象在与第一时钟同步的每一发送周期执行向总线71发送消息的处理和通过使用第二RAM 112中堆叠的消息在与第二时钟同步的每一发送周期向总线72发送消息的处理。因此,可以通过有效地使用两个总线71、72在每单位时间向总线71、72发送大量的消息。由于还能够将消息(下面将描述的滞留消息以外的消息)发送至总线72,因此,与将总线72用作下面要描述的滞留消息的专用总线的情况相比,可以更高效地增加能够在车载通信网络100中在节点Nd1至Ndn之间发送和接收的信息项的量。
第二协议控制器12可以具有与滞留计数器114相同的计数器。作为一个示例,假定在本实施方式中仅在第一协议控制器11中设置有滞留计数器114。
优选协作控制器13连接至第一协议控制器11和第二协议控制器12,并且还连接至第一RAM 111和第二RAM 112。
当产生了使得滞留计数器114的值超过预定值Nth的消息(在下文中,称为“滞留消息”)时,优选协作控制器13执行总线改变处理。预定值Nth是接近于低优先级确定的次数所允许的上限的值,并且是比上限略低的值。预定值Nth是由车辆系统的设计者确定以使得维持车辆系统所需的稳健性的适当的值。例如,可以基于堆叠在第一RAM 111中的所有消息中的最高优先级来设定预定值Nth,或者预定值可以是为每个节点设定的值(预定值)。在前一种情况下,堆叠在第一RAM 111中的所有消息中消息的最高优先级越高,则预定值Nth被设定得越低。
总线改变处理是将滞留消息发送至第一协议控制器11以外的第二协议控制器12的处理。即,总线改变处理是将作为滞留消息的发送目的地的总线从总线71变为总线72的处理。具体地,优选协作控制器13将位于第一RAM 111的队列的头部的滞留消息擦除,并且将滞留消息写入第二RAM 112中。优选协作控制器13将滞留消息写在第二RAM 112的队列的尾部,但是可以改变第二RAM 112的队列以使得滞留消息到达第二RAM 112的队列的尾部以外的位置。当优选协作控制器13执行总线改变处理时,滞留计数器114被清除。
采用根据本实施方式的车载通信网络100,由于针对每一消息对低优先级确定的次数进行计数,因此可以分别评估消息的低优先级确定状态。因此,可以基于消息的低优先级确定状态来执行总线改变处理。
具体地,采用根据本实施方式的车载通信网络100,当产生了使得滞留计数器114的值超过预定值Nth的消息时,执行总线改变处理。当执行总线改变处理时,第一协议控制器11以外的第二协议控制器12发送滞留消息。因此,较早地执行了对在滞留消息之后等待的消息通过第一协议控制器11向总线71的发送。换言之,当执行了总线改变处理时,由于作为滞留消息的发送目的地的总线从总线71变为总线72,所以滞留消息被从第一RAM 111的队列中擦除。因此,推动了对在滞留消息之后等待的消息(例如,具有相对高优先级的消息)的发送。从而,可以降低具有相对低优先级的消息例如滞留消息对车辆系统的稳健操作的影响。
顺便提及,由于总线71符合CAN,所以当显性(“0”)和隐性(“1”)被同时发送时,如上所述显性优先于隐性,并且总线71进入显性状态。因此,当指示总线71被锁定在显性状态下的异常(所谓显性锁定)发生时,来自节点Nd1至Ndn中的发生显性锁定的节点以外的节点的所有消息不能被发送至总线71(即,来自发生显性锁定的节点以外的节点的所有消息处于低优先级确定状态)。
采用根据本实施方式的车载通信网络100,即使在总线71中发生显性锁定时,由于滞留计数器114和优选协作控制器13类似地运行,因此可以减少由显性锁定引起的缺点。即,当总线71中发生显性锁定时,发生显性锁定的节点以外的节点的第一RAM 111中的消息可以被发送至总线72。
采用根据本实施方式的车载通信网络100,由于即使没有改变滞留消息的优先级也获得上述优点,所以可以避免当滞留消息的优先级改变时引起的问题(即下述问题:由于在总线71中滞留消息优先于具有相对高优先级的消息的事实,使得对车辆系统的稳健操作施加了相对强影响)。作为当滞留消息的优先级改变时所引起了另一问题,因为滞留消息的优先级的改变导致滞留消息的CAN_ID的改变,所以存在滞留消息将不被CAN中的预期节点接收的可能性。
图2是由第一协议控制器11和优选协作控制器13执行的处理的示意性流程图。在图2中,描述了与第一协议控制器11有关的处理以及与优选协作控制器13有关的处理。图2中示出的处理在消息的每一发送周期被执行。
在步骤S100中,第一协议控制器11执行向总线71发送消息的处理。即,第一协议控制器11向总线71发送在第一RAM 111的队列头部的消息。
在步骤S102中,第一协议控制器11确定与步骤S100中的消息发送处理有关的消息的发送是否完成。当确定结果是“是(真)”时,处理进行至步骤S104,而当确定结果是“否(假)”时,处理进行至步骤S112。
在步骤S104中,第一协议控制器11清除滞留计数器114。即,第一协议控制器11将滞留计数器114的值Cx重置为“0”。
在步骤S106中,第一协议控制器11向优选协作控制器13输出用于更新第一RAM111的队列的队列更新请求。
在步骤S108中,优选协作控制器13擦除第一RAM 111的队列头部的消息,并且更新第一RAM 111的队列。因此,当在本发送周期中完成了消息的发送时,消息被擦除。
在步骤S110中,优选协作控制器13设定预定值Nth。当预定值Nth被设定时,优选协作控制器13向第一协议控制器11通知预定设定值Nth。当预定值Nth是常数时,则不需要步骤S110。
在步骤S112中,第一协议控制器11将滞留计数器114的值Cx增加“1”。
在步骤S114中,第一协议控制器11确定滞留计数器114的值Cx是否等于或者小于预定值Nth。当确定结果是“是(真)”时,本处理周期中的处理结束,并且当确定结果是“否(假)”时,处理进行至步骤S116。
在步骤S116中,第一协议控制器11向优选协作控制器13输出用于通知滞留消息的发生的滞留发生通知。
在步骤S118中,第一协议控制器11将滞留计数器114的值Cx重置为“0”。
在步骤S120中,优选协作控制器13响应于滞留发生通知执行总线改变处理。总线改变处理如上所述。当步骤S120结束时,处理进行至步骤S110。
根据图2所示的处理,当滞留计数器114的值Cx超过预定值Nth时,优选协作控制器13可以执行总线改变处理。因此,可以降低具有相对低优先级的消息对车辆系统的稳健操作的影响。
在下文中,将参照图3至图7描述本实施方式的优点。在下面的描述中,为了便于描述,假定车载通信网络中的节点数量为3。
首先,将参照图3和图4描述相关技术的问题,即,具有相对低优先级的消息对车辆系统的稳健操作的影响。
图3和图4是示出根据相关技术的车载通信网络200的图。根据相关技术的车载通信网络200包括一个CAN总线,并且因此在每个节点中设置有一个CAN控制器。每个CAN控制器包括协议控制器和RAM。在图3和图4中,在CAN控制器的框中示意性地示出RAM中消息的堆叠状态。在示出的堆叠状态中,底部是队列的头部,并且在本示例中,在节点N1至N3中的每个节点中示出第一至第三消息。分配给消息的优先级在指定给消息的括号中示出。
在图3所示的示例中,节点N1至N3中的消息A至I向CAN总线的发送按照分别指定给消息的数字(1)至(9)的升序完成。具体地,在初始发送周期中,在节点N1至N3的头部的消息A、D、G中具有最高优先级的消息A处于高优先级确定状态,因此消息A的发送第一个完成。从而,消息B到达节点N1的队列的头部。在下一发送周期中,在节点N1至N3的头部的消息B、D、G中具有最高优先级的消息D处于高优先级确定状态,因此消息D的发送第二个完成。从而,消息E到达节点N2的队列的头部。在下一发送周期中,在节点N1至N3的头部的消息B、E、G中具有最高优先级的消息G处于高优先级确定状态,因此消息G的发送第三个完成。从而,消息H到达节点N3的队列的头部。对于剩余消息也是如此。在图3所示的示例中,在相对而言没有滞留的情况下完成了消息A至I的发送。
同时,在图4所示的示例中,由于各自具有优先级400h的多个消息M1被连续堆叠在节点N1中,并且每个消息M1具有比在节点N2和N3的头部的消息M2和M3的优先级更高的优先级,因此多个消息M1从节点N1向CAN总线的发送连续地完成。换言之,由于节点N2和N3的头部的消息M2和M3具有相对低优先级,所以相对于消息M1,消息M2和M3连续地处于低优先级确定状态,并且被滞留相对长时间。由于这样的相对长时间的滞留,具有相对高优先级的消息M4和M5也会在节点N2和节点N3中被滞留相对长时间。在图4所示的示例中,尽管消息M4和M5具有比消息M1的优先级更高的优先级,但是存在由于消息M2和M3而使得消息M4和M5相对长时间内不被发送至CAN总线的缺点。具有相对低优先级的消息M2和M3的发送在相对长时间内不能完成的情况可能对经由车载通信网络200构成的车辆系统的稳健操作施加相对强的影响。
与之相反,根据本实施方式,如将参照图5至图7所描述的,可以降低具有相对低优先级的消息对车辆系统的稳健操作的影响。
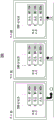
图5至图7是本实施方式的操作示例的说明图。在图5至图7中,未示出ECU 20和第二RAM 112。在图5至图7中,类似于图3和图4,示意性地示出了第一RAM 111中的消息的堆叠状态。在示出的堆叠状态中,底部是队列的头部,并且在本示例中,在节点Nd1至Nd3中示出了第一至第三(或者第一和第二)消息。分配给消息的优先级在指定给消息的括号中示出。图5中示出的第一RAM 111中的消息的堆叠状态与图4中示出的堆叠状态相同。
假定第一发送周期是初始发送周期,并且节点Nd1至Nd3中的每个节点的滞留计数器114的值是初始值“0”。假定向节点Nd2和Nd3设置的预定值Nth分别是“Nth2”和“Nth3”。作为一个示例,假定Nth2<Nth3。假定各自具有优先级“400h”的多个(大于预定值Nth2的数目)消息连续地存在于节点Nd1中。
如图5所示,在第一发送周期中,在节点Nd1至Nd3的头部的消息M1-1、M2-1、M3-1中消息M1-1处于高优先级确定状态,因此消息M1-1向总线71的发送完成。因此,节点Nd2和Nd3的滞留计数器114将计数器值增加1,并且节点Nd1的滞留计数器114被清除。
在第二发送周期中,在节点Nd1至Nd3的头部的消息M1-2、M2-1、M3-1中消息M1-2处于高优先级确定状态,因此消息M1-2向总线71的发送完成。因此,节点Nd2和Nd3的滞留计数器114将计数器值增加1,并且节点Nd1的滞留计数器114被清除。
在第三发送周期中,在节点Nd1至Nd3的头部的消息M1-3、M2-1、M3-1中消息M1-3处于高优先级确定状态,因此消息M1-3向总线71的发送完成。因此,节点Nd2和Nd3的滞留计数器114将计数器值增加1,并且节点Nd1的滞留计数器114被清除。
在下文中,通过重复这样的处理,节点Nd2和Nd3的滞留计数器114的计数器值增加,并且节点Nd2的滞留计数器114的计数器值超过预定值Nth2。即,如图6所示,在第[Nth2+1]发送周期中,在节点Nd1至Nd3的头部的消息M1-[Nth2+1]、M2-1、M3-1中消息M1-[Nth2+1]处于高优先级确定状态,因此消息M1-[Nth2+1]向总线71的发送完成。因此,节点Nd2和Nd3的滞留计数器114将计数器值增加1,并且节点Nd2的滞留计数器114的计数器值是“Nth2+1”,超过预定值Nth2。
当节点Nd2的滞留计数器114的计数器值超过预定值Nth2时,如上所述执行总线改变处理。在这种情况下,节点Nd2的滞留消息M2-1被从第一RAM 111中擦除,并且滞留消息M2-1被写入第二RAM 112。如图7所示,由于滞留消息M2-1被从节点Nd2中的第一RAM 111中擦除,所以消息M2-2到达第一RAM 111的队列的头部。
如图7所示,在第[Nth2+2]发送周期中,在节点Nd1至Nd3的头部的消息M1-[Nth2+2]、M2-2、M3-1中消息M2-2处于高优先级确定状态,因此消息M2-2向总线71的发送完成。这样做,解决了节点Nd2中具有高优先级的消息M2-2的滞留(由于消息M2-2位于具有相对低优先级的消息M2-1之后的事实而引起的滞留)。尽管未示出,但是可以类似地解决节点Nd3中具有高优先级的消息M3-2的滞留(由于消息M3-2位于具有相对低优先级的消息M3-1之后的事实而引起的滞留)。
这样做,根据本实施方式,由于可以缩短具有高优先级的消息M2-2和消息M3-2由于具有相对低优先级的消息M2-1和消息M3-1的滞留而被滞留的时长,因此可以降低具有相对低优先级的消息对车辆系统的稳健操作的影响。
虽然已经描述了实施方式,但是实施方式不限于特定的实施方式,并且可以在不偏离权利要求书描述的范围的情况下做出各种修改和变化。可以组合实施方式的所有或者多个部件。
虽然在上面描述的实施方式中已经描述了第二协议控制器12不具有与滞留计数器114相同的滞留计数器,但是第二协议控制器可以具有与滞留计数器114相同的滞留计数器。在这种情况下,优选协作控制器13在第一协议控制器11与第二协议控制器12之间实现滞留消息从任何一个控制器到另一控制器的转移。即,当第二协议控制器12的滞留计数器的值超过预定值Nth时(即,当在第二协议控制器12中产生滞留消息时),优选协作控制器13将滞留消息发送至第二协议控制器12以外的第一协议控制器11。即,优选协作控制器13擦除第二RAM 112中的滞留消息,并且将滞留消息写入第一RAM 111中。
虽然在上面描述的实施方式中已经描述了节点Nd1至Ndn连接至车载通信网络100中的两个总线71、72,但是总线的数量可以是三个或者更多个。例如,当除了总线71、72之外还设置有第三总线时,设置第三协议控制器和第三RAM。在这种情况下,当滞留计数器114的值超过预定值Nth时(即,当产生滞留消息时),优选协作控制器13将滞留消息发送至从第一协议控制器11以外的第二协议控制器12和第三协议控制器中选择的一个协议控制器。即,总线改变处理选择性地包括:将滞留消息被发送至的总线从总线71变成总线72的处理,以及将滞留消息被发送至的总线从总线71变成第三总线的处理。
尽管在上面描述的实施方式中已经描述了在车载通信网络100中总线72符合与总线71的协议相同的协议(在上面描述的实施方式中为CAN),但是总线可以符合其他协议。在这种情况下,节点Nd1至Ndn通过网关连接至总线72。
虽然在上面描述的实施方式中已经描述了节点Nd1至Ndn中的每一个均具有优选协作控制器13和滞留计数器114,但是可以仅节点Nd1至Ndn中的一部分(至少一个)包括优选协作控制器13和滞留计数器114。上面描述的优点可以在包括优选协作控制器13和滞留计数器114的节点中获得。
尽管在上面描述的实施方式中已经描述了第二协议控制器12也向总线72发送滞留消息以外的消息,但是实施方式不限于此。例如,第二协议控制器12可以只发送滞留消息。即,总线72可以是滞留消息的专用总线。
虽然在上面描述的实施方式中已经描述了第一协议控制器11在消息堆叠在第一RAM 111中的状态下对于与第一时钟同步的每一预定发送周期来执行向总线71发送消息的处理,但是实施方式不限于此。例如,第一协议控制器11可以在消息堆叠在第一RAM 111中的状态下按照对应于随机数目的第一时钟的周期或者按照对应于预定数目的规则变化的第一时钟的周期来执行向总线71发送消息的处理。这同样适用于第二协议控制器12。
Claims (7)
1.一种车载通信网络,特征在于包括:
第一总线;
第二总线;以及
多个节点,所述多个节点连接至所述第一总线和所述第二总线,
其中,所述多个节点中的至少一个节点包括:
第一发送处理单元,被配置成执行向所述第一总线发送消息的处理,
在所述第一总线上,在所述多个节点之中,具有相对高优先级的消息的发送优先于具有相对低优先级的消息的发送,
所述第一发送处理单元被配置成:
通过使用具有不同优先级的多个消息作为对象来执行向所述第一总线发送消息的所述处理,
针对每一消息,确定在所述第一总线上来自其他节点的消息是否优先于来自所述至少一个节点的消息,其中,所述其他节点是所述多个节点中所述至少一个节点以外的节点,以及
对来自所述其他节点的消息优先于来自所述至少一个节点的消息的次数进行计数,
第二发送处理单元,被配置成执行向所述第二总线发送消息的处理,以及
总线改变处理单元,被配置成:当产生了使得来自所述其他节点的消息优先于来自所述至少一个节点的消息的次数超过预定值的一个消息时,执行对总线进行改变以使得消息从所述第一发送处理单元以外的所述第二发送处理单元向所述第二总线进行发送的处理,
其中,所述第一发送处理单元还被配置成:
确定来自所述至少一个节点的消息的发送是否完成,以及
如果所述发送完成,则将来自所述其他节点的消息优先于来自所述至少一个节点的消息的次数设置为0。
2.根据权利要求1所述的车载通信网络,特征在于:
所述第一发送处理单元和所述第二发送处理单元被配置成通过使用不同的消息作为对象来分别执行发送消息的处理;以及
由所述第二发送处理单元执行消息发送处理的消息包括由于由所述总线改变处理单元执行的总线改变处理而被执行所述消息发送处理的消息以及不同于这些消息的消息。
3.根据权利要求1或2所述的车载通信网络,特征在于:
所述至少一个节点还包括:
第一存储单元,由所述第一发送处理单元执行消息发送处理的消息被写入所述第一存储单元,
第二存储单元,由所述第二发送处理单元执行消息发送处理的消息被写入所述第二存储单元,以及
所述总线改变处理单元被配置成:
从所述第一存储单元中擦除使得来自所述其他节点的消息优先于来自所述至少一个节点的消息的次数超过所述预定值的所述一个消息,将所述一个消息写入所述第二存储单元。
4.根据权利要求1或2所述的车载通信网络,特征在于,所述第一总线和所述第二总线符合控制器局域网络。
5.根据权利要求1或2所述的车载通信网络,特征在于,在向消息分配优先级时,向与车辆行驶控制有关的消息分配比与用于提高便利性和热舒适性的控制有关的消息的优先级高的优先级。
6.根据权利要求1或2所述的车载通信网络,特征在于:
通过使用二进制数据的码串来向所述第一总线和所述第二总线发送消息;以及
所述第一发送处理单元被配置成:
检测所述第一总线的电位变化;以及
当所述第一总线的电位变化与从所述至少一个节点发送的消息的码串不同时,确定来自所述其他节点的消息优先于来自所述至少一个节点的消息。
7.根据权利要求1或2所述的车载通信网络,特征在于:
在所述第二总线上,在所述多个节点之中,具有相对高优先级的消息的发送优先于具有相对低优先级的消息的发送;
所述第二发送处理单元被配置成:
通过使用具有不同优先级的多个消息作为对象来执行向所述第二总线发送消息的处理,
针对每一消息,确定在所述第二总线上来自其他节点的消息是否优先于来自所述至少一个节点的消息,其中,所述其他节点是所述多个节点中所述至少一个节点以外的节点,以及
对在所述第二总线上来自其他节点的消息优先于来自所述至少一个节点的消息的次数进行计数;以及
所述总线改变处理单元被配置成:当产生了使得在所述第二总线上来自所述其他节点的消息优先于来自所述至少一个节点的消息的次数超过预定值的一个消息时,执行对总线进行改变以使得消息从所述第一发送处理单元而不是所述第二发送处理单元向所述第一总线进行发送的处理。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016195102A JP6547719B2 (ja) | 2016-09-30 | 2016-09-30 | 車載通信ネットワーク |
| JP2016-195102 | 2016-09-30 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107888645A CN107888645A (zh) | 2018-04-06 |
| CN107888645B true CN107888645B (zh) | 2020-11-06 |
Family
ID=61623685
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710827104.3A Expired - Fee Related CN107888645B (zh) | 2016-09-30 | 2017-09-14 | 车载通信网络 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10397332B2 (zh) |
| JP (1) | JP6547719B2 (zh) |
| CN (1) | CN107888645B (zh) |
| DE (1) | DE102017121026B4 (zh) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106664281B (zh) | 2014-06-11 | 2020-07-10 | 马维尔国际有限公司 | 用于在无线通信系统中填充ofdm符号的方法和装置 |
| WO2017211875A1 (de) * | 2016-06-09 | 2017-12-14 | Inventio Ag | Personentransportanlage mit zentraler steuereinheit und mehreren feldgeräten, welche mit durch karenzzeiten priorisierte datentelegramme kommunizieren |
| DE112019003589T5 (de) * | 2018-08-24 | 2021-07-15 | Hitachi Automotive Systems, Ltd. | Fahrzeuginterne kommunikationsvorrichtung und fahrzeuginternes system |
| JP7042417B2 (ja) * | 2018-09-03 | 2022-03-28 | 株式会社オートネットワーク技術研究所 | 通信装置、送信方法及びコンピュータプログラム |
| KR20190098097A (ko) * | 2019-08-01 | 2019-08-21 | 엘지전자 주식회사 | 전자 제어 시스템 |
| CN111711550B (zh) * | 2020-05-22 | 2021-08-20 | 南昌大学 | 一种车载can网络消息的共享id序列方法 |
| CN114598752B (zh) * | 2022-03-07 | 2023-12-15 | 潍柴动力股份有限公司 | 报文处理方法、装置以及相关设备 |
| WO2024014191A1 (ja) * | 2022-07-15 | 2024-01-18 | 株式会社オートネットワーク技術研究所 | 管理装置、車両通信管理方法および車両通信管理プログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102025652A (zh) * | 2010-06-04 | 2011-04-20 | 西本新干线股份有限公司 | 服务总线以及消息处理方法 |
| CN104272664A (zh) * | 2012-03-22 | 2015-01-07 | 宝马股份公司 | 用于车辆的网关、节点和方法 |
| WO2015096952A1 (de) * | 2013-12-23 | 2015-07-02 | Robert Bosch Gmbh | Verfahren zur deterministischen datenübertragung in einem bussystem und bussystem |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100186364B1 (ko) * | 1996-10-17 | 1999-04-15 | 이종수 | 승강기의 신호전송 제어방법 |
| JP2001308889A (ja) * | 2000-04-20 | 2001-11-02 | Yokogawa Electric Corp | Csma/cd方式によるデータ送信装置 |
| US7522568B2 (en) * | 2000-12-22 | 2009-04-21 | Terahop Networks, Inc. | Propagating ad hoc wireless networks based on common designation and routine |
| JP3729740B2 (ja) * | 2001-01-04 | 2005-12-21 | 株式会社日立製作所 | 自動車用総合制御ユニット及び自動車 |
| JP2002359625A (ja) | 2001-05-31 | 2002-12-13 | Aisin Seiki Co Ltd | コントロールエリアネットワーク |
| JP2003030134A (ja) | 2001-07-12 | 2003-01-31 | Matsushita Electric Ind Co Ltd | バスアービタ及びバスアービトレーション方法 |
| JP4407752B2 (ja) * | 2008-01-10 | 2010-02-03 | トヨタ自動車株式会社 | 故障箇所検出装置及び通信装置並びに故障箇所検出方法 |
| WO2010067138A1 (en) * | 2008-12-10 | 2010-06-17 | Telefonaktiebolaget L M Ericsson (Publ) | Systems and methods for controlling data transmission rates |
| JP2011182258A (ja) | 2010-03-02 | 2011-09-15 | Renesas Electronics Corp | CAN(ControllerAreaNetwork)システム、通信ユニット、及び通信方法 |
| JP5472238B2 (ja) * | 2011-08-29 | 2014-04-16 | 株式会社デンソー | 車両用無線通信装置及び通信システム |
| EP4236196A3 (en) * | 2014-05-08 | 2023-10-18 | Panasonic Intellectual Property Corporation of America | In-vehicle network system, fraud-sensing electronic control unit, and anti-fraud method |
| CN105594155B (zh) * | 2014-05-08 | 2019-08-02 | 松下电器(美国)知识产权公司 | 车载网络系统、电子控制单元以及更新处理方法 |
| JP6525825B2 (ja) * | 2015-08-31 | 2019-06-05 | 国立大学法人名古屋大学 | 通信装置 |
-
2016
- 2016-09-30 JP JP2016195102A patent/JP6547719B2/ja active Active
-
2017
- 2017-09-12 DE DE102017121026.1A patent/DE102017121026B4/de active Active
- 2017-09-14 CN CN201710827104.3A patent/CN107888645B/zh not_active Expired - Fee Related
- 2017-09-14 US US15/704,779 patent/US10397332B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102025652A (zh) * | 2010-06-04 | 2011-04-20 | 西本新干线股份有限公司 | 服务总线以及消息处理方法 |
| CN104272664A (zh) * | 2012-03-22 | 2015-01-07 | 宝马股份公司 | 用于车辆的网关、节点和方法 |
| WO2015096952A1 (de) * | 2013-12-23 | 2015-07-02 | Robert Bosch Gmbh | Verfahren zur deterministischen datenübertragung in einem bussystem und bussystem |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102017121026A1 (de) | 2018-04-05 |
| US20180097887A1 (en) | 2018-04-05 |
| US10397332B2 (en) | 2019-08-27 |
| JP2018061076A (ja) | 2018-04-12 |
| DE102017121026B4 (de) | 2024-03-07 |
| JP6547719B2 (ja) | 2019-07-24 |
| CN107888645A (zh) | 2018-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107888645B (zh) | 车载通信网络 | |
| JP6500875B2 (ja) | 車載ネットワークシステム、及び、車載ネットワークシステムにおける通信制御方法 | |
| US10284387B2 (en) | Hybrid intra-vehicle communication network | |
| CN106059961B (zh) | 网络交换机电路、系统和方法 | |
| EP2882146A1 (en) | Data transmission device, communication control method, and communication control program | |
| WO2021017667A1 (zh) | 业务数据的传输方法和装置 | |
| US20180049210A9 (en) | Access Method with Access Slots and Priority Resolution | |
| CN101106438B (zh) | 通信网络系统和错误验证方法 | |
| Klehmet et al. | Delay bounds for CAN communication in automotive applications | |
| JP2007300331A (ja) | 車載データベースシステム | |
| JP4839140B2 (ja) | 中継接続ユニット | |
| CN113545012B (zh) | 通信装置、通信系统及消息仲裁方法 | |
| JP4457306B2 (ja) | 自動車用制御ユニット | |
| CN108632242B (zh) | 通信装置及接收装置 | |
| EP4231595A1 (en) | Relay device, communication network system, and communication control method | |
| JP2014204160A (ja) | ゲートウェイ装置 | |
| EP2421204A2 (de) | Zeit- und Prioritäts-gesteuerter Sende/empfangsknoten | |
| CN112769660A (zh) | 车辆控制器、包括该车辆控制器的系统及其方法 | |
| JP2010247791A (ja) | 入出力装置及び制御システム | |
| Park et al. | Performance evaluation of a method to improve fairness in in-vehicle non-destructive arbitration using ID rotation | |
| JP2007243322A (ja) | ゲートウェイ装置、データ転送方法及びプログラム | |
| Klehmet et al. | Real-time guarantees for CAN traffic | |
| US9775035B2 (en) | Architecture and apparatus for controller secure message processing | |
| JP5099755B2 (ja) | 通信方法、通信システム及び通信装置 | |
| US11956188B1 (en) | Security aware routing in an in-vehicle communication network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20201106 |