CN106027043B - 电路装置、电子设备以及移动体 - Google Patents
电路装置、电子设备以及移动体 Download PDFInfo
- Publication number
- CN106027043B CN106027043B CN201610188201.8A CN201610188201A CN106027043B CN 106027043 B CN106027043 B CN 106027043B CN 201610188201 A CN201610188201 A CN 201610188201A CN 106027043 B CN106027043 B CN 106027043B
- Authority
- CN
- China
- Prior art keywords
- circuit
- frequency
- clock signal
- signal
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims abstract description 109
- 238000012545 processing Methods 0.000 claims abstract description 86
- 230000010355 oscillation Effects 0.000 claims description 149
- 238000006243 chemical reaction Methods 0.000 claims description 45
- 238000000034 method Methods 0.000 claims description 26
- 230000008569 process Effects 0.000 claims description 19
- 230000001360 synchronised effect Effects 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 15
- 230000006866 deterioration Effects 0.000 abstract description 9
- 230000035945 sensitivity Effects 0.000 description 28
- 235000014676 Phragmites communis Nutrition 0.000 description 26
- 230000010354 integration Effects 0.000 description 17
- 230000006870 function Effects 0.000 description 11
- 230000003321 amplification Effects 0.000 description 10
- 239000003990 capacitor Substances 0.000 description 10
- 238000003199 nucleic acid amplification method Methods 0.000 description 10
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000004048 modification Effects 0.000 description 8
- 238000012546 transfer Methods 0.000 description 8
- 238000005070 sampling Methods 0.000 description 6
- 239000013078 crystal Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000000630 rising effect Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 238000007667 floating Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000009966 trimming Methods 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 238000007664 blowing Methods 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000003139 buffering effect Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000003071 parasitic effect Effects 0.000 description 2
- 238000013139 quantization Methods 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 241001270131 Agaricus moelleri Species 0.000 description 1
- 101100174180 Caenorhabditis elegans fos-1 gene Proteins 0.000 description 1
- 239000008186 active pharmaceutical agent Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000037081 physical activity Effects 0.000 description 1
- 238000011045 prefiltration Methods 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/16—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop
- H03L7/18—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop using a frequency divider or counter in the loop
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5649—Signal processing
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/099—Details of the phase-locked loop concerning mainly the controlled oscillator of the loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/16—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop
- H03L7/18—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop using a frequency divider or counter in the loop
- H03L7/181—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop using a frequency divider or counter in the loop a numerical count result being used for locking the loop, the counter counting during fixed time intervals
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Stabilization Of Oscillater, Synchronisation, Frequency Synthesizers (AREA)
- Gyroscopes (AREA)
Abstract
本发明提供一种能够降低由于物理量传感器的驱动频率成分对检测电路造成的影响而产生的检测性能的恶化的电路装置、电子设备以及移动体等。电路装置具有:驱动电路,其对物理量传感器进行驱动;FLL电路,其具有频率比较器和振荡器,并将来自驱动电路的信号作为基准时钟信号而生成时钟信号;检测电路,其具有根据时钟信号而工作的电路,并对来自所述物理量传感器的检测信号实施检测处理。
Description
技术领域
本发明涉及一种电路装置、电子设备以及移动体等。
背景技术
一直以来,已知一种根据来自物理量传感器(transducer)的检测信号而对物理量进行检测的电路装置。如果以陀螺传感器为例,则电路装置对作为物理量的角速度等进行检测。陀螺传感器被组装在例如数码照相机、智能手机等电子设备或汽车、飞机等移动体中,并利用所检测出的角速度等物理量,而实施抖动补偿、姿态控制、GPS(globalpositioning system:全球定位系统)自动导航等。
在上述的电路装置中,例如在检测电路中设置有A/D转换电路或DSP部 (数字处理部)等用于物理量的检测的电路的情况下,如果采用在电路装置中设置具有振荡电路的时钟信号生成电路,并通过该时钟信号生成电路而生成高速的时钟信号的方法,则能够实现这些电路的高速工作。
但是,当采用该方法时,在对物理量传感器与电路装置进行连接而作为物理量检测装置而构成的情况下,对物理量传感器进行驱动的驱动信号的驱动频率成分可能会对基于由时钟信号生成电路生成的时钟信号的信号而工作的电路产生影响,从而使检测性能恶化。
另外,在专利文献1中公开了PLL(Phase Locked Loop:锁相环路)电路,所述PLL电路中,A/D转换电路根据电压控制振荡器的输出时钟而对驱动信号进行A/D转换,并且以在该A/D转换中驱动信号在零点(正弦波的相位零)处被进行采样的方式对电压控制振荡器进行反馈控制。此外,在专利文献2中公开了,通过使用了计数器的数字处理的相位比较而使其相位与驱动信号同步的PLL电路。但是,专利文献1、2均为,通过PLL电路而生成相位与驱动信号同步的时钟信号的技术。
专利文献1:日本特开2010-34722号公报
专利文献2:日本特开2012-217121号公报
发明内容
根据本发明的若干方式,能够提供一种能够降低由于物理量传感器的驱动频率成分对检测电路造成的影响而产生的检测性能的恶化的电路装置、电子设备以及移动体等。
本发明的一个方式涉及一种电路装置,包括:驱动电路,其对物理量传感器进行驱动;FLL(Frequency Locked Loop:锁频环路)电路,其具有频率比较器与振荡器,并将来自所述驱动电路的信号作为基准时钟信号而生成时钟信号;检测电路,其具有根据所述时钟信号而工作的电路,并对来自所述物理量传感器的检测信号实施检测处理。
根据本发明的一个方式,通过FLL电路而将来自驱动电路的信号作为基准时钟信号而生成时钟信号,并通过包括根据由该FLL电路所生成的时钟信号而工作的电路在内的检测电路而对来自物理量传感器的检测信号实施检测处理。由此能够降低由于物理量传感器的驱动频率成分对检测电路造成的影响而产生的检测性能的恶化。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述频率比较器具有分频电路和比较器,所述分频电路对所述基准时钟信号进行分频,所述比较器对比较对象值与所述比较对象值的基准值实施比较处理,所述比较对象值为,基于来自所述分频电路的分频时钟信号和来自所述振荡器的所述时钟信号而取得的值。
以此方式,通过对比较对象值与该比较对象值的基准值实施比较处理从而能够实现频率比较,并根据该频率比较的结果而对振荡器的振荡频率进行控制,所述比较对象值为基于对基准时钟信号进行分频的分频时钟信号和来自振荡器的时钟信号而得到的值。此外,根据这种结构,使由数字处理而实施频率比较成为可能,从而能够使频率比较器简化。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述频率比较器具有计数器,所述计数器将通过利用所述时钟信号而对由所述分频时钟信号所规定的测量期间进行计数从而被测量出的计数值,作为所述比较对象值而输出。
以此方式,通过利用时钟信号而对由分频时钟信号所规定的测量期间进行计数,从而能够将该计数值作为基于分频时钟信号与时钟信号而得到的比较对象值来求取。并且,通过对该计数值与计数值的基准值进行比较处理,从而能够实现频率比较。
此外,在本发明的一个方式中,也可以采取如下方式,即,在将所述基准值设为SC,将所述分频电路的分频比设为DR,将来自所述驱动电路的信号的频率设为FR,将所述振荡器所输出的所述时钟信号的频率设为FV的情况下,FV=(SC/DR)×FR。
以此方式,在本发明的一个方式中,时钟信号的频率FV与来自驱动电路的信号的频率FR的频率比成为SC/DR。通过以此方式使频率比固定,从而能够可靠地避免物理量传感器的驱动频率成分与检测电路的工作频率相干扰的干扰频率,从而降低检测性能的恶化。
此外,在本发明的一个方式中,也可以采取如下方式,即,SC/DR为小数。
由于j×FR≠FV/i,FV=(SC/DR)×FR,因此SC/DR≠j×i。即,通过将SC/DR设定为小数,从而能够生成避免了干扰频率的时钟信号。
此外,在本发明的一个方式中,也可以采取如下方式,即,SC为小数。
以此方式,能够实现即使在分频电路的分频比DR较小的情况下也将 SC/DR设定为任意的小数,并且能够在避免了干扰频率的基础上设定适当的频率比SC/DR。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述电路通过基于所述时钟信号而得到的工作用信号来工作,在将i设为1以上的整数,将j设为1以上的整数,将所述工作用信号的频率设为FV/i的情况下,以 j×FR≠FV/i的方式对SC/DR进行设定。
假设在根据来自频率未被锁定的振荡器的时钟信号而生成了工作用信号,并将该振荡器的振荡频率设为fos的情况下,则干扰频率将会是成为j×FR=fos/i的频率fos。关于这点,根据本发明的一个方式,以使时钟信号的频率FV成为j×FR≠FV/i的方式而对SC/DR进行设定,并且由于该频率比SC/DR通过FLL电路而被保持为固定,因此能够可靠地避免干扰频率。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述振荡器具有CR(阻容)振荡电路,所述CR振荡电路被设定有基于所述频率比较器的输出而得到的振荡频率设定值,并根据所述振荡频率设定值而进行振荡。
CR振荡电路的振荡频率会由于构成该CR振荡电路的电阻或电容器、晶体管的温度特性或制造偏差而发生变动。假设在向检测电路供给了该CR振荡电路所生成的时钟信号的情况下,可能会由于上述的变动而使电路的工作频率与干扰频率一致。关于此点,根据本发明的一个方式,由于通过FLL电路而对CR振荡电路的振荡频率进行控制,因此能够对避免干扰频率的振荡频率进行维持。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述CR振荡电路具有可变电容电路以及可变电阻电路中的至少一方,并且通过根据所述振荡频率设定值而对所述可变电容电路的电容值或所述可变电阻电路的电阻值进行设定,从而对所述CR振荡电路的振荡频率进行设定。
以此方式,通过根据振荡频率设定值而对所述可变电容电路的电容值或所述可变电阻电路的电阻值进行设定,从而能够实现由FLL电路实施的振荡频率的反馈控制,由此对避免干扰频率的振荡频率进行维持。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述CR振荡电路具有可变电容电路与可变电阻电路,所述可变电阻电路具有:被串联连接的多个电阻元件;多个熔丝元件,所述多个熔丝元件中的各个熔丝元件相对于所述多个电阻元件的各电阻元件而并联地被设置,所述可变电容电路为根据所述振荡频率设定值而被设定电容值的电路。
以此方式,通过熔丝元件的熔断而能够对可变电阻电路的电阻值进行调节。并且,根据该调节,能够在与振荡频率设定值对应的振荡频率的调节范围中包括所需的振荡频率的方式对振荡频率进行粗调节。
此外,在本发明的一个方式中,也可以采取如下方式,即,包括环路滤波器,所述环路滤波器被设置在所述频率比较器与所述振荡器之间。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述环路滤波器具有积分器和增益处理部,所述积分器对所述频率比较器的输出进行积分,所述增益处理部对所述积分器的输出实施增益处理。
以此方式,通过在FLL电路中设置频率比较器和对该频率比较器的输出进行积分的积分器,从而能够实施由Δ-Σ(delta sigma)调制而实施的振荡频率的反馈控制。由此,即使在通过振荡频率设定值而选择了离散的振荡频率的情况下,也能够生成在时间平均上成为所需的振荡频率的时钟信号。
此外,在本发明的一个方式中,也可以采取如下方式,即,所述检测电路具有A/D转换电路以及数字信号处理部中的至少一方,以作为根据所述时钟信号而工作的所述电路。
此外,在本发明的一个方式中,也可以采取如下方式,即,包括控制部,所述控制部根据所述时钟信号而工作,并对所述驱动电路和所述检测电路进行控制。
由于物理量传感器的驱动频率成分与A/D转换电路或数字信号处理部的工作频率产生干扰,从而可能产生检测性能的恶化。关于此点,根据本发明的一个方式,由于能够实现避免了干扰频率的工作频率,因此能够降低检测性能的恶化。
此外,本发明的其它方式涉及一种电子设备,其包括上述任意一种方式所述的电路装置。
此外,本发明的其它方式涉及一种移动体,其包括上述任意一种方式所述的电路装置。
附图说明
图1为本实施方式的电路装置的结构例。
图2为电路装置的比较结构例。
图3为对干扰频率的说明图。
图4为本实施方式的FLL电路的第一结构例。
图5为本实施方式的FLL电路的第二结构例。
图6为对于本实施方式的FLL电路的传递函数的说明图。
图7为本实施方式的FLL电路的设定参数的第一示例。
图8中的(A)至图8中的(D)为第一示例的设定参数下的FLL电路的工作波形示例。
图9为第一示例的设定参数下的FLL电路的工作波形示例。
图10为本实施方式的FLL电路的设定参数的第二示例。
图11中的(A)至图11中的(C)为第二示例的设定参数下的FLL电路的工作波形示例。
图12为本实施方式的FLL电路的设定参数的第三示例。
图13为振荡器为CR振荡电路的情况下的振荡器的结构例。
图14为构成CR振荡电路的放大电路、可变电阻电路以及可变电容电路的详细结构例。
图15为振荡器的改变结构例。
图16为FLL电路的改变结构例。
图17为运算处理部的结构例。
图18为本实施方式的电路装置、电子设备、陀螺传感器(物理量检测装置)的结构例。
图19为驱动电路、检测电路的详细结构例。
图20中的(A)至图20中的(D)为组装有本实施方式的电路装置的移动体、电子设备的示例。
具体实施方式
以下,对本发明的优选的实施方式进行详细说明。另外,在下文中所说明的本实施方式并不是对权利要求书所记载的本发明的内容不当地进行限定的方式,并且在本实施方式中所进行说明的所有结构也并不一定均是作为本发明的解决方法所必须的。
1.电路装置的结构例
图1为表示本实施方式的电路装置的结构例。电路装置20包括:驱动电路30,其对物理量传感器12进行驱动;FLL(Frequency Locked Loop)电路130,其将来自驱动电路30的信号作为基准时钟信号而生成时钟信号OSQ;检测电路60,其实施来自物理量传感器12的检测信号TQ的检测处理。
FLL电路130为生成相对于基准时钟信号CKF的频率比(倍数率)被保持为固定(锁定)的时钟信号OSQ的电路。时钟信号OSQ的相位也可以不与基准时钟信号CKF的相位同步。FLL电路130具有对基准时钟信号CKF与时钟信号OSQ的频率进行比较的频率比较器132、和根据与该频率比较器132 的输出值QFD(输出信号)对应的频率而进行振荡的振荡器134。通过该反馈环路而使得基准时钟信号CKF与时钟信号OSQ的频率比被锁定。另外,基准时钟信号CKF为根据驱动电路30内的信号而生成的时钟信号,例如为与物理量传感器12的驱动频率相同或为其两倍的频率的时钟信号。
检测电路60具有根据时钟信号OSQ而工作的电路。即,该电路根据相对于来自驱动电路30的基准时钟信号CKF而频率比被保持为固定的时钟信号 OSQ而工作。
检测电路60中被输入含有驱动信号的频率成分的来自物理量传感器12 的检测信号TQ。即,根据时钟信号OSQ而工作的电路对含有驱动信号的频率成分的信号进行处理。根据本实施方式,由于通过FLL电路130而使时钟信号OSQ与驱动信号的频率比保持为固定,因此能够降低由于驱动频率成分对检测电路造成的影响而产生的检测性能的恶化。关于此点,以下进行详细说明。
本实施方式的检测电路60具有A/D转换电路以及数字信号处理部中的至少一方,以作为根据时钟信号OSQ而工作的电路。另外,在以下,虽然以检测电路60包括A/D转换电路以及数字信号处理部的情况为示例而进行说明,但是在不包括某一方的情况下也能够适用本发明。
一直以来,通过基于对物理量传感器12进行驱动的驱动电路30的驱动信号而取得的信号而使这些电路进行工作,但是驱动信号的驱动频率并不是很高(例如50~150kHz)。因此,存在不易实现A/D转换电路或数字信号处理部等用于物理量的检测的电路的高速工作之类的问题。
作为解决该问题的方法,采用了如下的方法,即,在电路装置中设置具有振荡电路的时钟信号生成电路,并通过该时钟信号生成电路而生成高速的时钟信号的方法。图2中示出了该情况下的电路装置的比较结构例。图2为物理量传感器为振动片10(角速度传感器元件)的情况下的比较结构例。
该电路装置20包括:驱动电路30、检测电路60、时钟信号生成电路70。检测电路60包括:放大电路61,其对来自振动片10的检测信号IQ进行放大;同步检波电路81,其通过来自驱动电路30的同步信号SYC而对来自放大电路61的信号进行同步检波;滤波部90,其对来自同步检波电路81的信号进行低通滤波处理;A/D转换电路100,其对来自滤波部90的信号进行A/D 转换;DSP部110(数字信号处理部),其对来自A/D转换电路100的信号进行数字处理并输出角速度信息。
向DSP部110输入时钟信号生成电路70所生成的主时钟信号MCK,并且 DSP部110根据该主时钟信号MCK而进行工作。此外,DSP部110对主时钟信号MCK进行分频从而生成用于A/D转换的时钟信号CKAD,并且A/D转换电路 100根据该时钟信号CKAD而实施A/D转换工作。
由于时钟信号生成电路70根据其中所包含的振荡电路而生成主时钟信号MCK,因此能够输出与振动片10的驱动频率相比而较高的频率的主时钟信号MCK。由此,能够使A/D转换电路100或DSP部110高速工作。
但是,振荡电路的振荡频率会根据例如温度依存性或制造偏差等各种要素而发生变动。例如,作为振荡电路而可以假定CR振荡器,CR振荡器的振荡频率根据构成该振荡器的电容器或电阻、晶体管的温度特性或制造偏差而并不固定。在产生了这种振荡频率的变动的情况下,主时钟信号MCK与驱动信号的频率比也会发生变动,从而可能会发生因驱动信号的频率与A/D转换电路100或DSP部110的工作频率之间的干扰而引起的角速度码的偏差的问题。
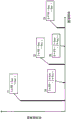
图3为对干扰频率的说明图。图3的横轴为振荡频率,纵轴表示角速度码偏差的大小。
将时钟信号生成电路70中所包含的振荡电路的振荡频率设为fos,将i、 j、k设为1以上的整数,将采样时钟信号等工作用信号的频率设为fsm= fos/i,将驱动信号的频率设为FR。在i≥2的情况下,i相当于时钟信号的分频比,fos/i成为通过分频比i而被进行了分频的采样时钟信号等工作用信号的频率。
在该情况下,干扰频率为在j×FR=k×fos/i成立时的振荡频率。即,当将干扰频率设为fin时,在fos=fin的情况下,j×FR=k×fos/i的关系式成立。
例如,在图3的I1所示的干扰频率中,1×FR=fsm=fos/i成立。例如,当将I1的干扰频率设为fos=fin1时,1×FR=fos/i=fin1/i成立。这相当于在j×FR=k×fos/i的关系式(干扰条件)中,j=1,k=1的情况。
此外,在I2所示的干扰频率中,2×FR=fsm=fos/i成立。例如,当将 I2所示的干扰频率设为fos=fin2时,2×FR=fos/i=fin2/i成立。这相当于j×FR=k×fos/i的关系式中,j=2,k=1的情况。
此外,在I3所示的干扰频率中,3×FR=fsm=fos/i成立。例如,当将 I3所示的干扰频率设为fos=fin3时,3×FR=fos/i=fin3/i成立。这相当于j×FR=k×fos/i的关系式中,j=3,k=1的情况。
在I4所示的干扰频率中,3×FR=2×fsm=2×fos/i成立。例如,当将 I4所示的干扰频率设为fos=fin4时,3×FR=2×fos/i=2×fin4/i成立。这相当于j×FR=k×fos/i的关系式中,j=3,k=2的情况。
在I5所示的干扰频率中,5×FR=2×fsm=2×fos/i成立。例如,当将 I5所示的干扰频率设为fos=fin5时,5×FR=2×fos/i=2×fin5/i成立。这相当于j×FR=k×fos/i的关系式中,j=5,k=2的情况。
如上文所述,在干扰频率中,由j×FR=k×fsm=k×fos/i的关系式所表示的干渉条件成立。在此,j×FR相当于驱动频率FR的高次谐波成分(j ≥2)或基础波成分(j=1)。此外,fsm=fos/i为A/D转换电路100的采样频率(广义而言,工作用信号的频率)。因此,作为干渉条件的j×FR= k×fos/i成为,驱动频率FR的高次谐波成分(j≥2)或基础波成分(j=1) 与采样频率fos/i的k倍一致的条件。
另外,图3所示的干扰频率下的角速度码偏差是由于混入到了A/D转换电路100的输入信号中的无用信号的频率成分(驱动频率成分)通过A/D转换电路100的采样工作而在信号带中折返等原因而产生。因此,干扰频率下的角速度码偏差实际上并不是在j×FR与k×fsm完全一致的情况下,而是在 j×FR与k×fsm的频率差Δf足够小的情况下被显著地表现。具体而言,由于在频率差Δf低于作为所需信号的频率带宽的信号带宽的频率(例如200Hz~10Hz)的情况下,因频率差Δf而产生的折返噪声将在信号带宽中出现,因此会产生角速度码偏差(揺摆)的问题。在频率差Δf较大的情况下,会通过DSP部110的带宽限制用的低通滤波器而使折返噪声充分降低,因此也不会产生角速度码偏差。以此方式,可以认为在本实施方式中应该避免的干扰频率具有所给定的频率宽度(信号带宽宽度,Δf)。
在本实施方式中,采用了将FLL电路130所输出的时钟信号OSQ的频率设定为避免了这种干扰频率的频率的方法。即,在将时钟信号OSQ的频率设为FV,将i、j设为1以上的整数,将工作用信号的频率设为FV/i的情况下,以使j×FR≠FV/i的方式对时钟信号OSQ的频率FV进行设定。工作用信号的频率FV/i为A/D转换电路100的采样时钟信号或DSP部110的工作时钟信号 (输出数据比率)的频率。
具体而言,利用图4等而在后文叙述的FLL电路130的结构例中,在将向比较器131输入的基准值设为SC、将分频电路133的分频比设为DR的情况下,FV=(SC/DR)×FR成立。在该情况下,通过以使j×FR≠FV/i的方式对SC/DR进行设定(SC/DR≠j×i),从而将时钟信号OSQ的频率FV设定为避免了干扰频率的频率。
以此方式,只要以使j×FR≠FV/i的方式对频率FV进行设定,就能够将频率FV设定为避免了图3的I1、I2、I3所示的干扰频率(j×FR=1×fos/i) 的频率。因此,能够降低I1、I2、I3所示的较大值的角速度码偏差的产生,从而能够降低检测性能的恶化。
而且,在本实施方式中,优先为,在将k设为1以上的整数的情况下,以使j×FR≠k×FV/i的方式对频率FV进行设定。即,将频率FV设定为不仅避免了图3的I1、I2、I3所示的k=1的情况下的干扰频率,而且避免了I4、 I5所示的k≥2的情况下的干扰频率(j×FR=k×fos/i)的频率。以此方式,不仅能够防止I1、I2、I3所示的较大值的角速度码偏差的产生,也能够防止 I4、I5所示的比较小的值的角速度码偏差的产生。
另外,如以上所说明的那样,由于只要FLL电路130的振荡频率避免了干扰频率即可,因此基准时钟信号CKF与时钟信号OSQ的相位无需被锁定(同步)。即,频率比较器45只要是能够进行频率的比较的电路即可,也可以不实施相位的比较。而且,FLL电路130只要是能够对基准时钟信号CKF与时钟信号OSQ的频率比进行锁定的电路即可。
2.FLL电路的第一结构例
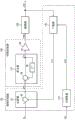
图4为表示本实施方式的FLL电路的第一结构例。该FLL电路130包括频率比较器132、环路滤波器136、振荡器134。频率比较器132包括比较器 131、分频电路133、计数器135。
分频电路133对来自驱动电路30的基准时钟信号CKF进行分频。比较器 131对比较对象值CTQ与比较对象值CTQ的基准值SC的比较处理,所述比较对象值CTQ为基于来自分频电路133的分频时钟信号DVQ和来自振荡器134 的时钟信号OSQ而取得的值。计数器135将通过利用所述时钟信号OSQ而对由分频时钟信号DVQ所规定的测量期间进行计数从而被测量出的计数值,作为比较对象值CTQ而输出。
具体而言,分频时钟信号DVQ的周期为测量期间,在该测量期间内计数器135对时钟信号OSQ进行计数,并将测量期间结束时的计数值作为比较对象值CTQ而输出。比较器131输出基于比较对象值CTQ与基准值SC的差分而产生的输出值QFD。被设置在频率比较器132与振荡器134之间的环路滤波器136对输出值QFD进行滤波处理(例如,积分处理、低通滤波处理等)并输出振荡频率设定值TRM(修整值)。振荡器134被设定为基于该频率比较器 132的输出值QFD而取得的振荡频率设定值TRM,并根据该振荡频率设定值 TRM而进行振荡。即,振荡频率设定值TRM为在预定范围内能够取得多个值的设定值,并且振荡器134以根据该设定值而振荡器134的振荡频率将会发生变化的方式被构成。
在比较对象值CTQ与基准值SC不一致的情况下,输出值QFD将会发生变化,从而振荡频率设定值TRM会发生变化,时钟信号OSQ的频率会变化,比较对象值CTQ会变化。通过这种反馈控制而振荡器134的振荡频率被控制,从而使振荡器134的振荡频率相对于来自驱动电路30的基准时钟信号CKF 的频率的频率比被保持为固定。
在以上的第一结构例中,能够将频率比较器132与环路滤波器136通过逻辑电路(数字电路)而构成。通过能够将除振荡器134以外的部分由逻辑电路来构成,从而与由模拟电路构成的情况相比能够实现电路的简化或面积削减等。
3.FLL电路的第二结构例
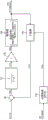
图5为表示本实施方式的FLL电路的第二结构例。该FLL电路130包括:频率比较器132、环路滤波器136、振荡器134。频率比较器132包括比较器 131、分频电路133、计数器135。环路滤波器136包括积分器137、增益处理部139。另外,在以下,对于与已经说明的结构要素相同的结构要素标记相同的符号,并适当地省略对其说明。
比较器131为差分器,实施来自计数器135的比较对象值CTQ与基准值 SC的差分处理,并输出根据该差分处理而求取的差分值QFD。
积分器137对频率比较器132的输出(差分值QFD)进行积分,并输出根据该积分而求得的积分值ITQ。具体而言,积分器137包括:延迟电路46 (例如锁存电路等),其使积分值ITQ延迟与分频时钟信号DVQ的一个周期对应的量;加法器44,其对延迟电路46的输出与积分值ITQ进行加算处理。加法器44的输出成为积分值ITQ。
增益处理部139对积分器137的输出(积分值ITQ)实施增益处理,并将该进行了增益处理的值作为振荡频率设定值TRM而输出。增益处理为将积分值ITQ乘以增益的处理。
那么,振荡器134根据数字的振荡频率设定值TRM而以离散的振荡频率进行振荡。因此,当振荡频率设定值TRM将成为恒定时,振荡频率会被固定为离散的振荡频率中的某一个,从而无法获得相对于驱动频率而具有所需的频率比的时钟信号OSQ(在频率比中产生误差)。关于此点,根据本实施方式,通过在FLL电路130的环路中设置比较器131(差分器)和积分器137,从而能够对时钟信号OSQ的频率进行Δ-Σ(delta sigma)调制。即,时钟信号 OSQ的频率通过调制而以时间序列发生变化,从而能够作为其平均的频率,来获得相对于驱动频率而具有所需的频率比的时钟信号OSQ。
以下,对上述结构例的详细工作进行说明。图6为表示对图5的FLL电路130的传递函数进行说明的图。
在图6的等效电路图中记载了各结构要素的传递函数。SC为基准值,且为等效电路的输入。g为将与积分值相乘的增益。Q为将振荡器134视为量子化器的情况下的量子化噪声。HD2F为将作为数字值的振荡频率设定值转换为振荡器134的振荡频率FV的系数。在例如将十进制的数字值10转换为频率 200kHz的情况下,HD2F=200kHz/10=20kHz。振荡频率FV为等效电路的输出。 HF2D为将振荡器134的振荡频率FV转换为计数器135的计数值(比较对象值) 的系数。在例如将频率200kHz转换为计数值2000的情况下,HF2D= 2000/200kHz=10ms(100Hz)。该值对应于计数器135中的测量期间。由于计数器135在测量期间结束之后输出在该测量期间内所进行计数而得到的计数值,因此当从环路进行观察时,成为1周期之前的计数值。因此,作为计数器135的等效电路而包括延迟电路(z-1)。
根据上述的等效电路,FLL电路130的传递函数STF=FV/SC成为式FA。该传递函数STF为低通特性,其DC特性STFDC(ω=0时的传递函数STF)成为式FB。此外FLL电路130的噪声传递函数NTF=FV/Q成为式FC。可知该噪声传递函数NTF为高通特性,并且低频率下的噪声较小。即,在根据时间而对振荡频率FV进行平均的情况下,量子化噪声被降低。
在将分频电路133的分频比设为DR,并且将来自驱动电路30的基准时钟信号CKF的频率设为FR的情况下,由于计数器135中的测量期间成为1/ (FR/DR)=DR/FR,因此成为HF2D=DR/FR。由于与式FB相比,DC特性为STFDC=FV/SC=1/HF2D,因此成为FV/SC=FR/DR,FV=(SC/DR)×FR。即,FLL电路130所生成的时钟信号OSQ的频率FV与来自驱动电路30的基准时钟信号 CKF的频率FR的比为SC/DR。
如图3所说明那样,干扰频率为使j×FR=k×fos/i成立的振荡频率 fos。在本实施方式中,为了避免该干扰频率从而以使j×FR≠k×FV/i成立的方式而对时钟信号OSQ的频率FV进行设定。即,设定为FV/FR=SC/DR≠ (j×i)/k。
在k=1的情况下,(j×i)/k成为1以上的整数,在k≥2的情况下,(j×i) /k成为分数(小数)或1以上的整数。因此,在本实施方式中,将SC/DR设定为小数。由此,能够至少避免k=1的情况下的干扰频率、和在k≥2的情况下(j×i)/k成为整数的情况下的干扰频率。此外,在(j×i)/k为分数的情况下,通过避免该分数而对SC/DR进行设定,从而能够避免干扰频率。
此外,在本实施方式中,也可以将基准值SC设定为小数。在该情况下,即使分频比DR较小,也能够将SC/DR设定为任意的小数。即,在欲使由比较器131而进行比较的周期(测量期间)缩短的情况下,需要减小分频比DR。例如,在将基准值SC设为整数,将分频比设为DR=3的情况下,除了SC/DR 的整数部的小数部成为0.333…或0.666…,作为小数所能够进行的选择较少。关于此点,通过将基准值SC设定为小数,从而能够将SC/DR设定为任意的小数。
另外,也可以采用如下的结构,即,上述的参数(基准值SC、分频比DR、增益处理部139的增益)通过例如外部的处理部(例如图18的处理部520) 而被写入电路装置20的寄存器部(例如图18的寄存器部142)中。
图7为表示FLL电路130的设定参数的第一示例,图8中的(A)至图9为表示基于该设定参数的工作波形示例。
如图7所示,将基准值设为SC=16,将增益设为1,将基准时钟信号CKF 的频率设为FR=50kHz,将分频比设为DR=4。设振荡频率设定值TRM为0~ 15这16个灰度,振荡频率FV的1个灰度级为2KHz,并且在TRM=8时振荡频率FV=200kHz。在该情况下,作为DC特性,成为FV=(SC/DR)×FR=200kHz。
从工作开始起的时间序列的变化如以下所示。如图8中的(A)所示,将积分器137的输出(积分值ITQ)的初期值设为例如零。此时,如图8中的(B)所示,由于振荡频率设定值成为TRM=0,因此如图8中的(D)所示,振荡频率从FV= 184kHz开始。由于振荡频率FV低于目标200kHz,因此计数值(比较对象值 CTQ)与基准值SC=16相比而较小,并且成为差分值QFD>0。因此,积分值 ITQ将会增加,振荡频率设定值TRM将会增加,振荡频率FV会上升。重复进行该动作,从而达到作为目标的FV=200kHz。
图9为与上述的时间序列变化对应的时序图。如图9所示,计数器135 在分频时钟信号DVQ的上升沿处输出计数值。即,在分频时钟信号DVQ的上升沿处计数器135被复位,并将从该复位的时刻起至下一个被复位的时刻为止的期间设为测量期间并对时钟信号OSQ进行计数,且将该计数值作为比较对象值CTQ而输出。
差分器42和积分器137和增益处理部139以与分频时钟信号DVQ的上升同步的方式工作。即,差分器42在分频时钟信号DVQ的上升沿处输出基准值 SC与比较对象值CTQ的差分值QFD。积分器137中,在分频时钟信号DVQ的上升沿处延迟电路(z-1)进行工作,而对积分值ITQ进行更新。增益处理部139在分频时钟信号DVQ的各上升沿处输出振荡频率设定值TRM。
比较对象值CTQ(计数值)、积分值ITQ和在振荡频率设定值TRM的时序图中记载的数值对应于图8中的(C)、图8中的(A)、图8中的(B)中的波形。可知,振荡频率设定值TRM从作为初期值的TRM=0起逐渐靠近与目标200kHz对应的 TRM=8。
图10中示出了FLL电路130的设定参数的第二示例,图11中的(A)至图11中的(C)表示基于该设定参数的工作波形示例。第二示例为,在振荡频率FV的灰度中不包含与目标相同的频率的情况的示例。
如图10所示,将基准值设为SC=320,将增益设为1/32,将基准时钟信号CKF的频率设为FR=50kHz,将分频比设为DR=32。设振荡频率设定值TRM 为0~15这16个灰度,振荡频率FV的1个灰度级为1kHz,并且在TRM=8 时振荡频率FV=498.2kHz。在该情况下,作为DC特性,而FV=(SC/DR)×FR =500kHz。
如图11中的(A)至图11中的(C)所示,在从开始工作起的时间序列中,振荡频率FV逐渐靠近目标500kHz的情况与上述的第一示例相同。在第二示例中,在靠近目标500kHz之后,振荡频率FV并不会被固定而是通过Δ-Σ(delta sigma)调制而发生变动。即,由于TRM=9时FV=499.2KHz,TRM=10时FV =500.2KHz,因此通过Δ-Σ(delta sigma)调制而交替地使TRM=9或10 以便平均成为500kHz。
图12为表示FLL电路130的设定参数的第三示例。第三示例为将SC/DR 设定为小数的情况下的示例。
如图12所示,将基准值设为SC=40.4,将增益设为1/40.4,将基准时钟信号CKF的频率设为FR=50kHz,将分频比设为DR=4。设振荡器134的模型与图10相同。设为频率设定值TRM为0~15这16个灰度,振荡频率FV 的1个灰度级为1kHz,并且在TRM=8时振荡频率FV=503.2kHz。在该情况下,作为DC特性,而FV=(SC/DR)×FR=505KHz。
4.振荡器
以下,将振荡器134为CR振荡电路的情况为示例而对振荡器134进行详细说明。
本实施方式的CR振荡电路具有可变电容电路以及可变电阻电路中的至少一方。并且,通过根据振荡频率设定值TRM而对可变电容电路的电容值或可变电阻电路的电阻值进行设定,从而对CR振荡电路的振荡频率FV进行设定。
图13中示出了该情况下的振荡器134的详细结构例。作为振荡器134 的CR振荡电路具有:电容器C、可变电阻电路196(第一频率调节部)、可变电容电路197(第二频率调节部)、放大电路180(缓冲电路)。
CR振荡电路被供给电源电压VDOS而进行工作,并生成时钟信号OSQ(振荡信号)。具体而言,CR振荡电路使用由电容器和电阻构成的RC电路而将信号反馈至输入端,从而生成振荡信号。并且,对所生成的振荡信号进行了波形整形而得到的信号作为时钟信号OSQ而输出。
放大电路180(反转放大电路)具有逆变器电路IV0、IV1、IV2。逆变器电路IV1的输出经由电容器C而被反馈至放大电路180的输入节点NI。逆变器电路IV2的输出经由可变电阻电路196(R)而被反馈至放大电路180的输入节点NI。逆变器电路IV0的输入成为放大电路180的输入。
从逆变器电路IV2输出的振荡信号通过逆变器电路IV3而被进行波形整形,并且作为矩形波的时钟信号OSQ而被输出。另外,也可以采取如下方式,即在逆变器电路IV3的后级处设置分频电路,并输出对时钟信号OSQ进行分频而获得的一个或多个时钟信号。
在该结构例中,在物理量传感器12与电路装置20被连接并且FLL电路 130进行工作的状态下,根据振荡频率设定值TRM而对可变电容电路197的电容值进行设定。由此,CR振荡电路的振荡频率通过FLL电路130的环路而被控制。可变电容电路197成为其电容值能够可变地调节的电路,并且通过使可变电容电路197的电容值变化,从而使RC电路的电容值发生变化,进而对CR振荡电路的振荡频率进行设定。
另一方面,在物理量传感器12与电路装置20被连接之前,CR振荡电路的振荡频率通过可变电阻电路196而被进行调节。此时,CR振荡电路的振荡频率被调节至目标的振荡频率(避免了干扰频率的频率)的附近。即,以使目标振荡频率(避免了干扰频率的频率)进入能够通过振荡频率设定值TRM 而进行设定的振荡频率的范围内的方式,对可变电阻电路196的电阻值进行调节。可变电阻电路196成为其电阻值能够可变地调节的电路,并且通过使可变电阻电路196的电阻值发生变化,从而使RC电路的电阻值变化,进而对 CR振荡电路的振荡频率进行设定。
以此方式,在本实施方式中,能够实现物理量传感器12与电路装置20 被连接之前的状态下的振荡频率的调节(粗调节)、和物理量传感器12与电路装置20被进行了连接的状态下的由FLL电路130实施的振荡频率的锁定 (将驱动频率与振荡频率的比保持为固定的控制)。由此,能够生成避免了干扰频率的频率的时钟信号OSQ,从而能够降低由于上述的干渉而产生的检测性能的恶化。
另外,虽然在图13中以CR振荡电路包括可变电容电路197以及可变电阻电路196、并且根据振荡频率设定值TRM而对可变电容电路197的电容值进行设定的情况为例而进行了说明,但是CR振荡电路的结构并不限定于此。例如,也可以不包括可变电容电路197以及可变电阻电路196中的一方。或者,也可以通过根据振荡频率设定值TRM而对可变电阻电路196的电阻值进行设定,从而对振荡频率进行控制。或者,也可以通过包含未图示的电压生成电路,并且该电压生成电路根据振荡频率设定值TRM而对电源电压VDOS 进行变更,从而对振荡频率进行控制。或者,也可以包含未图示的电压生成电路,并且通过对该电压生成电路所生成的电源电压VDOS进行粗调节,从而对振荡频率进行粗调节。
图14中示出了构成CR振荡电路的放大电路180、可变电阻电路196以及可变电容电路197的详细结构例。
放大电路180具有NAND电路NA和逆变器电路IV1、IV2。逆变器电路IV1 的输出经由电容器C而被反馈至放大电路180的输入节点NI。逆变器电路IV2 的输出经由可变电阻电路196而被反馈至放大电路180的输入节点NI。NAND 电路NA的第一输入端成为放大电路180的输入端,向NAND电路NA的第二输入端中输入使能信号EN。当使能信号EN成为H电平时,CR振荡电路被设定为工作使能状态,当使能信号EN成为L电平时被设定为工作失能状态。
可变电阻电路196具有:被串联连接的多个电阻元件R1~R6;多个熔丝元件FU1~FU6(广义而言为开关元件),多个熔丝元件FU1~FU6中的各熔丝元件相对于多个电阻元件R1~R6中的各电阻元件而被并联连接。例如,熔丝元件FU1与电阻元件R1并联连接,熔丝元件FU2与电阻元件R2并联连接。熔丝元件FU3~FU6与电阻元件R3~R6的连接结构也相同。此外,可变电阻电路196具有与多个电阻元件R1~R6串联连接的基准电阻元件R7。即,多个电阻元件R1~R6以及基准电阻元件R7被串联连接在放大电路180的输出节点NQ与输入节点NI之间。
可变电容电路197具有可变电容元件CV1~CV4和电容控制电压输出电路 BC1~BC4。可变电容元件CV1~CV4的一端与放大电路180的输出节点NQ连接,另一端与电容控制电压输出电路BC1~BC4的输出端连接。可变电容元件 CV1~CV4为根据电容控制电压输出电路BC1~BC4所输出的电容控制电压而电容发生变化的元件。电容控制电压被设定为与振荡频率设定值TRM对应的电压。可变电容元件CV1~CV4能够通过例如可变电容(变容)等而实现。可变电容电路197能够通过例如以二进制的方式被进行了加权的可变电容元件的阵列而实现,在该情况下,基于电容控制电压而实施的控制成为高电平与低电平的二进值控制。例如,在振荡频率设定值TRM为4位的情况下,从其 LSB侧起电容控制电压输出电路BC1~BC4分别输出第一至第四位的逻辑电平。
5.使用了可变电阻电路的振荡频率的调节
接下来,对使用了可变电阻电路196的振荡频率的调节方法进行说明。振荡频率的调节的目的在于,针对由半导体晶片处理器实施的晶体管或电阻等的元件偏差,使用可变电阻电路196而调节为所需的振荡频率。
图14的可变电阻电路196的电阻元件R1~R6的电阻值例如以二进制的方式被进行了加权。例如R1~R6的各电阻元件由一个或多个电阻单元构成。例如R1由20=1个电阻单元构成,R2由被串联连接的21=2个的电阻单元构成,R3由被串联连接的22个电阻单元构成。同样地,R4、R5、R6分别由被串联连接的23个、24个、25个电阻单元构成。因此,当将单元电阻的电阻值设为RU时,R1的电阻值被设定为20×RU(=RU),R2的电阻值被设定为21×RU (=2×RU),R3的电阻值被设定为22×RU,R4的电阻值被设定为23×RU,R5 的电阻值被设定为24×RU,R6的电阻值为25×RU。
另一方面,R7为用于对成为基准的振荡频率进行设定的基准电阻元件,当将作为R7的电阻值的基准电阻值设为RB时,RB能够被设定为与例如R6 相同程度的电阻值。通过以此方式进行设定,从而能够在预定范围内(例如 RB~RB+RU×(26-1)的范围)可变地对可变电阻电路196的电阻值进行设定。
如图14所示,FU1~FU6的各熔丝元件与R1~R6的各电阻元件被并联设置。并且,在熔丝熔断之前,全部的熔丝元件FU1~FU6成为非熔断状态。因此,可变电阻电路196的电阻值被设定为R7的基准电阻值RB(准确而言, RB+熔丝元件等寄生电阻值)。并且,在该状态下,对CR振荡电路的振荡频率进行测量。当将测量出的振荡频率设为fr时,通过例如下式(1)所示那样,由fr的线性方程式来表示的修整方程式(trimming equation)而对熔丝值进行计算。另外a、b为常数。
熔丝值=a×fr+b (1)
根据所计算出的熔丝值来决定熔断(修整)熔丝元件FU1~FU6中的哪一个。例如设为根据通过修整方程式而计算出的熔丝值而使熔丝元件FU1、FU3、 FU4、FU5熔断。在该情况下,可变电阻电路196的电阻值成为RB+R1+R3 +R4+R5(+寄生电阻值)。
具体而言,通过将熔丝值(转换为整数之后的熔丝值)转换为以二进制表示的数据,从而能够决定所熔断的熔丝元件。例如,如果熔丝值=1=20,则对熔丝元件FU1进行熔断,如果熔丝值=2=21,则对熔丝元件FU2进行熔断。此外,如果熔丝值=3=20+21,则对熔丝元件FU1以及FU2进行熔断,如果熔丝值=4=22,则对熔丝元件FU3进行熔断,如果熔丝值=5=20+22,则对熔丝元件FU1以及FU3进行熔断。即,熔丝元件FU1相当于以二进制表示的熔丝值的LSB,熔丝元件FU2相当于LSB的其次的位,熔丝元件FU3相当于其其次的位。同样地,熔丝元件FU6相当于以二进制表现的熔丝值的MSB。并且,如果熔丝值的LSB为1,则对熔丝元件FU1进行熔断,如果为零则不进行熔断。如果LSB的其次的位为1,则对熔丝元件FU2进行熔断,如果为零则不进行熔断。
6.振荡器的改变例
以上,虽然对振荡器134为CR振荡电路的情况为例而进行了说明,但是振荡器134并不限定于该结构。例如,振荡器134也可以为图15所示的结构。
图15所示的振荡器134包括:D/A转换电路72,其对振荡频率设定值 TRM进行D/A转换;电压控制振荡器74,其根据来自D/A转换电路72的模拟的输出电压DAQ而进行振荡。在将该振荡器134应用于本实施方式的FLL电路130中的情况下,D/A转换电路72的输出电压DAQ根据振荡频率设定值TRM 而发生变化,而且时钟信号OSQ的频率由此发生变化,其频率经由频率比较器132与环路滤波器136而被反馈至振荡频率设定值TRM。虽然模拟的输出电压DAQ采用了离散的电压值,但是如图5等所说明的那样,通过Δ-Σ(delta sigma)调制而输出作为平均值的成为所需的频率的时钟信号OSQ。
7.FLL电路的改变例
此外,在以上,虽然对FLL电路130的频率比较器132与环路滤波器136 由逻辑电路而构成的情况为例而进行了说明,但是FLL电路130并不限定于该结构。例如,如图16所示,频率比较器132或环路滤波器136也可以由模拟电路而构成。
图16所示的FLL电路130包括:频率比较器45、环路滤波器43、振荡器48、分频电路41。
分频电路41对时钟信号OSQ进行分频,并输出分频时钟信号DVOS。频率比较器45对基准时钟信号CKF的频率与分频时钟信号DVOS的频率进行比较,并输出基于它们的差分而得出的模拟信号QP。例如,频率比较器45通过电荷泵电路而被实现。环路滤波器43对模拟信号QP进行低通滤波处理,并将通过该处理而得到的电压作为控制电压VLQ而输出。例如,环路滤波器 136通过由电容器或电阻而构成的被动低通滤波器而被实现。振荡器48根据与控制电压VLQ对应的频率而进行振荡,并输出时钟信号OSQ。例如振荡器 48通过电压控制振荡器(VCO)而被实现。
8.运算处理部
根据以上所说明的FLL电路130,利用将来自驱动电路30的基准时钟信号CKF设为SC/DR倍而得到的时钟信号OSQ(或者,对其进行了分频而得到的工作时钟信号),而能够使A/D转换电路100或DSP部110进行工作。
此时,由于物理量传感器12的驱动频率根据制造偏差等而变动,因此随着该频率的变动而时钟信号OSQ的频率也会发生变动。例如,虽然在陀螺传感器中,通过对角速度信息进行积分而求取角度信息,但是由于DSP部110 等的工作频率发生变化而积分期间会改变,从而可能在角速度信息中产生误差。
因此,在本实施方式中,通过使被设置在检测电路60的后级处的运算处理部150实施以下的处理,从而能够求取更准确的角速度信息。另外,运算处理部150也可以被包含在检测电路60的DSP部110中。
图17中示出了运算处理部150的结构例。运算处理部150包括乘法处理部155、积分处理部156,并利用对时钟信号OSQ进行DO分频而得到的工作时钟信号而进行工作(即,使用基准时钟频率FR,并且利用被表示为(SC/DR) ×FR/DO的频率的工作时钟信号而进行工作)。乘法处理部155实施基于来自检测电路60的角速度信息QG(物理量信息)和运算系数CF(广义而言,驱动频率信息)而进行的乘法处理,其中,所述运算系数CF的值根据驱动电路30的驱动频率而被设定。积分处理部156接收乘法处理部155的乘法结果QM (例如角度位移),并实施对于乘法结果QM的积分处理。由此,实现了角速度信息QG的积分处理。并且,积分处理部156输出转速信息QH。该转速信息QH具有固定小数点表示的整数部REVQ与小数部DEGQ。
运算系数CF为以如后文叙述的方式根据驱动电路30的驱动频率而使其值被设定的系数。更加具体而言,成为根据驱动频率以及角速度信息的设定灵敏度而使其值被设定的系数。乘法处理部155通过实施使角速度信息QG 乘以这种运算系数CF的处理,从而实现基于由驱动电路30的驱动频率来规定的时间间隔信息的运算处理。
更加具体而言,乘法处理部155包含乘法器MLA。该乘法处理部155实施使角速度信息QG(陀螺信号)乘以运算系数CF(定数)的乘法处理。由此,对数据速率的时间间隔内的角度位移(Δθ)进行计算。该角度位移通过角速度与时间间隔的乘法处理而被求取。并且,时间间隔通过运算系数CF而被设定。
向乘法处理部155输入的运算系数CF以例如下式(2)的方式表示。
CF=1/(360×SEN×fxt×(SC/DR)/DO) (2)
在上式(2)中,SEN表示设定灵敏度(LSB/dps),fxt表示振动片10(水晶振动片)的驱动频率(Hz)。具体而言,设定灵敏度SEN为作为物理量检测装置(陀螺传感器)的规格(设计值)而被设定的角速度的灵敏度。即,设定灵敏度SEN例如以SEN=300(LSB/dps)的方式作为产品的规格而唯一地被决定。此外,作为基准时钟信号而使用振动片10的驱动信号(或者,基于驱动信号而得到的信号),fxt为在将电路装置20与振动片10连接了的状态下测定出的驱动频率。即,fxt为根据驱动频率的测定结果而被设定的驱动频率。另外,运算系数CF并不限定于上式(2),例如能够实施使上式(2) 乘以预定的常数而得到的系数等的各种改变。
以此方式,在本实施方式中,使用根据驱动电路30的驱动频率(fxt)、与角速度(物理量信息)的设定灵敏度(SEN)而使其值被进行设定的运算系数CF,而实施运算处理部150的运算处理(乘法处理)。并且,该运算系数 CF的设定中所使用的驱动频率(fxt)是根据驱动频率的测定结果而被设定的数值。具体而言,在本实施方式中,上式(2)的运算系数CF作为驱动频率信息(根据驱动频率而其值被进行设定的信息),被写入非易失性存储器 146中。并且,运算处理部150从非易失性存储器146读取作为驱动频率信息的运算系数CF,并且根据由该驱动频率信息来规定的时间间隔信息而实施运算处理。
在驱动电路30的驱动频率中,相对于设计值而会产生偏差。例如,相对于驱动频率的设计值(50kHz~200kHz)而产生偏差。并且,在本实施方式中,由于运算处理部150的运算处理中的时间间隔信息由驱动频率而被规定,因此当在驱动频率中存在偏差时,在运算结果中也会产生偏差。例如,在检测对象实际上旋转了10度的情况下,当在驱动频率中存在偏差时,作为运算处理部150的运算结果的旋转角度不会成为10度,而会成为与10度不一致的角度。
关于此点,在本实施方式中,在将振动片10与电路装置进行了连接的状态下对驱动频率进行测定,并且如上式(2)所示那样,根据所测定出的驱动频率(fxt)而求取运算系数CF(广义而言,驱动频率信息),并存储在非易失性存储器146中。并且,运算处理部150根据从该非易失性存储器146中读取的运算系数CF而实施运算处理。因此,由于运算处理中所使用的时间间隔信息是根据所测定出的驱动频率(fxt)而被规定的,因此即使在驱动频率中存在偏差的情况下,运算处理部150也能够输出更加准确的运算结果。
此外,通过DSP部110而对检测电路60所进行检测的角速度实施灵敏度补正,并且以角速度的灵敏度成为作为设计值的设定灵敏度的方式进行补正。该设定灵敏度的值有时会根据物理量检测装置的产品而不同,当以不考虑该设定灵敏度的方式运算处理部150实施积分处理等运算处理时,无法获得准确的运算结果。
关于此点,在本实施方式中,如上式(2)所示,根据设定灵敏度SEN 而求取运算系数CF,并且运算处理部150根据该运算系数CF而实施运算处理。因此,能够根据与从检测电路60输出的角速度的灵敏度相对应的运算系数CF而实施运算处理。例如,在设定灵敏度SEN为300(LSB/dps)的情况下,从检测电路60输出的角速度的灵敏度也被设定为300(LSB/dps),并且通过使以上式(2)的方式将设定灵敏度SEN设定为分母的运算系数CF乘以来自检测电路60的角速度,从而能够获得不依存于灵敏度的准确的运算结果。
积分处理部156包括浮点积分器160(浮点数积分器)、和定点积分器164 (定点数积分器)。此外,也能够包括检测器162、定点转换部166、寄存器 168、169。
浮点积分器160对浮点形式的角度位移(Δθ=ω×t)进行积算,从而对角度进行计算。在此,为了以不降低浮点运算的精度的方式而实施积算,优选为将浮点积分器160的输出的值总是设为较小的值(例如2-16以下)。因此,当浮点积分器160的输出的值越过固定值时,实施减去该量的处理。例如,当检测器162判断为浮点积分器160的输出的值超过了例如2-16时,实施从积分结果(输出值)中减去例如“+1”大小的减去量的处理,并将与该减去量相对应的加上量“+1”在其他的定点积分器164中进行加法运算的处理。向定点的转换也在该时刻实施。同样地,当判断为浮点积分器160的输出的值超过了例如2-15时,实施从积分结果中减去例如“+2”大小的减去量的处理,并将与该减去量相对应的加上量“+2”在定点积分器164中进行加法运算的处理。在超过2-14、2-13、2-12、2-11的情况下的减去量以及加上量分别成为“+4”、“+8”、“+16”、“+32”。
并且,定点积分器164的输出等经由寄存器168、寄存器169而作为转速信息的整数部REVQ、小数部DEGQ而被输出。
另外,在图17中,关于微小角度成分(下位8位),不经由上述的定点积分器164,而是对以浮点表示的浮点积分器160的输出进行直接转换。例如,在浮点数的指数部所示的值为2-15的情况下,通过将第8位设为1,并且将浮点数的尾数部的上位7位作为下位7位而输出,从而实施向定点数的转换。该转换由定点转换部166实施,并且所得到的8位的定点数向寄存器169 输出。同样地,浮点数的指数部所示的值为2-14的情况下,通过将第8、7位设为0、1,并且将浮点数的尾数部的上位6位作为下位6位而输出,从而实施向定点数的转换。
如以上方式,在图17中,运算处理部150相对于以浮点数表示的角速度信息QG(物理量信息)而实施运算处理,并输出以定点数表示的转速信息QH (运算后物理量信息)。该定点数表示的转速信息QH(角度信息)由整数部 REVQ与小数部DEGQ构成。
9.电子设备、陀螺传感器、电路装置的详细结构
图18中示出了本实施方式的电路装置20、包含该电路装置20的陀螺传感器510(广义而言,物理量检测装置)、包含该陀螺传感器510的电子设备 500的详细结构例。
另外,电路装置20、电子设备500、陀螺传感器510并不限定于图18 的结构,也能够实施省略其结构要素的一部分或者追加其他的结构要素等各种的改变。此外,作为本实施方式的电子设备500,能够假定数码照相机、摄像机、智能电话、手机、汽车导航系统、机器人、生物体信息检测装置、游戏机、时钟、健康器具、或者便携式信息终端等各种的设备。此外,在以下中,虽然以物理量传感器(角速度传感器元件)为压电型的振动片(振动陀螺仪)、且传感器为陀螺传感器的情况为例而进行了说明,但本发明并不限定于此。例如本发明也能够应用于,由硅基板等形成的静电电容检测方式的振动陀螺仪、和对与角速度信息等效的物理量或角速度信息以外的物理量进行检测的物理量传感器等中。
电子设备500包括陀螺传感器510和处理部520。此外,能够包含存储器530、操作部540、显示部550。以CPU、MPU等来实现的处理部520(外部的处理装置)实施陀螺传感器510等的控制或电子设备500的整体控制。此外,处理部520根据由陀螺传感器510检测出的角速度信息(广义而言,物理量)而实施处理。例如,基于角速度信息,而实施用于抖动校正、姿态控制、GPS自动导航等的处理。存储器530(ROM、RAM等)对控制程序或各种数据进行存储,或作为工作区域或数据储存区域而发挥功能。操作部540为用于供用户进行操作的部件,显示部550向用户显示各种的信息。
陀螺传感器510(物理量检测装置)包括振动片10和电路装置20。振动片10(广义而言,物理量传感器、角速度传感器元件)为由水晶等压电材料的薄板所形成的压电型振动片。具体而言,振动片10为由Z切割的水晶基板所形成的双T字型的振动片。
电路装置20包括:驱动电路30、FLL电路130、检测电路60、控制部 140、寄存器部142、输出部144(接口部)、非易失性存储器146、运算处理部150。另外,能够实施省略这些结构要素的一部分或者追加其他的结构要素等各种的改变。
FLL电路130根据来自驱动电路30的信号而生成时钟信号。检测电路60 包括A/D转换电路100、DSP部110,该A/D转换电路100、DSP部110和运算处理部150、控制部140根据来自FLL电路130的时钟信号或对该时钟信号进行了分频而得到的时钟信号而工作。
控制部140实施电路装置20的控制处理。该控制部140能够由逻辑电路 (门阵列等)或处理器等实现。电路装置20的各种开关控制或模式设定等通过该控制部140而被实施。
驱动电路30输出驱动信号DQ并对振动片10进行驱动。例如,通过从振动片10接收反馈信号DI,并输出与此相对应的驱动信号DQ,从而使振动片 10激振。检测电路60从通过驱动信号DQ而被驱动的振动片10接收检测信号IQ1、IQ2(检测电流、电荷),并根据检测信号IQ1、IQ2,而检测出(提取)与被施加在振动片10上的物理量相对应的所需信号(科里奥利力信号)。
振动片10具有:基部1,连结臂2、3,驱动臂4、5、6、7,检测臂8、 9。检测臂8、9相对于矩形形状的基部1而向+Y轴方向、-Y轴方向延伸。此外,连结臂2、3相对于基部1而向-X轴方向、+X轴方向延伸。并且,驱动臂4、5相对于连结臂2而向+Y轴方向、-Y轴方向延伸,驱动臂6、7 相对于连结臂3而向+Y轴方向、-Y轴方向延伸。另外,X轴、Y轴、Z轴为表示水晶轴的轴,并分别被称为电轴、机械轴和光学轴。
来自驱动电路30的驱动信号DQ被输入至设置在驱动臂4、5的上表面上的驱动电极、和设置在驱动臂6、7的侧面上的驱动电极。此外,来自设置在驱动臂4、5的侧面上的驱动电极、和设置在驱动臂6、7的上表面上的驱动电极的信号,作为反馈信号DI而被输入至驱动电路30。此外,来自设置在检测臂8、9的上表面上的检测电极的信号,作为检测信号IQ1、IQ2而被输入至检测电路60。另外,被设置在检测臂8、9的侧面上的共用电极例如被接地。
当通过驱动电路30而施加交流的驱动信号DQ时,驱动臂4、5、6、7 通过逆压电效应而实施如箭头标记A所示的弯曲振动(激振振动)。即,实施驱动臂4、6的顶端反复相互接近和远离、且驱动臂5、7的顶端也反复相互接近和远离的弯曲振动。此时,由于驱动臂4、5和驱动臂6、7相对于穿过基部1的重心位置的Y轴而实施线对称的振动,因此,基部1、连结臂2、3、检测臂8、9几乎不发生振动。
在该状态下,当对振动片10施加以Z轴为旋转轴的角速度时(当振动片 10以绕Z轴的方式进行旋转时),驱动臂4、5、6、7通过科里奥利力而以箭头标记B所示的方式进行振动。即,通过使与箭头标记A的方向和Z轴的方向正交的箭头标记B的方向的科里奥利力作用于驱动臂4、5、6、7上,从而产生箭头标记B的方向的振动成分。该箭头标记B的振动经由连结臂2、3 而传递至基部1,并且检测臂8、9在箭头标记C的方向上实施弯曲振动。通过由该检测臂8、9的弯曲振动而引起的压电效应所产生的电荷信号,作为检测信号IQ1、IQ2而被输入至检测电路60。在此,驱动臂4、5、6、7的箭头标记B的振动为相对于基部1的重心位置的圆周方向的振动,检测臂8、9 的振动为与箭头标记B在圆周方向上为相反朝向的、箭头标记C的方向上的振动。检测信号IQ1、IQ2成为相对于驱动信号DQ而相位仅偏移了90度的信号。
例如,当将绕Z轴的振动片10(陀螺传感器)的角速度设为ω,将质量设为m,将振动速度设为v时,科里奥利力被表示为Fc=2m·v·ω。因此,通过检测电路60对作为与科里奥利力相对应的信号的所需信号进行检测,从而能够求出角速度ω。并且,通过使用所求得的角速度ω,从而能够使处理部520实施用于抖动修正、姿态控制、或者GPS自动导航等各种处理。
另外,虽然在图18中图示了振动片10为双T字型的情况下的示例,但本实施方式的振动片10并不限定于这样的结构。例如也可以为音叉型、H型等。此外,振动片10的压电材料也可以为水晶以外的陶瓷或硅等材料。
图19为表示电路装置的驱动电路30、检测电路60的详细结构例。
驱动电路30包括:输入有来自振动片10的反馈信号DI的放大电路32、实施自动增益控制的增益控制电路40、向振动片10输出驱动信号DQ的驱动信号输出电路50。此外,包括向检测电路60输出同步信号SYC的同步信号输出电路52。另外,驱动电路30的结构并不限定于图19,也能够实施省略这些结构要素的一部分或者追加其他的结构要素等各种改变。
放大电路32(I/V转换电路)对来自振动片10的反馈信号DI进行放大。例如将来自振动片10的电流的信号DI转换为电压的信号DV并输出。该放大电路32能够通过运算放大器、反馈电阻元件、反馈电容器等来实现。
驱动信号输出电路50基于由放大电路32实现的放大后的信号DV而输出驱动信号DQ。例如在驱动信号输出电路50输出矩形波(或者正弦波)的驱动信号的情况下,驱动信号输出电路50能够通过比较器等来实现。
增益控制电路40(AGC)向驱动信号输出电路50输出控制电压DS,并对驱动信号DQ的振幅进行控制。具体而言,增益控制电路40对信号DV进行监视,并对振荡环路的增益进行控制。例如在驱动电路30中,为了使陀螺传感器的灵敏度维持在固定,而需要将向振动片10(驱动用振动片)供给的驱动电压的振幅维持在固定。因此,在驱动振动系统的振荡环路内,设置有用于自动调节增益的增益控制电路40。增益控制电路40以使来自振动片10的反馈信号DI的振幅(振动片的振动速度v)成为固定的方式,而可变地对增益进行调节。该增益控制电路40能够通过对放大电路32的输出信号DV进行全波整流的全波整流器、或实施全波整流器的输出信号的积分处理的积分器等来实现。
同步信号输出电路52接收由放大电路32实施放大后的信号DV,并向检测电路60输出同步信号SYC(参照信号)。该同步信号输出电路52能够通过比较器或相位调节电路(移相器)等来实现,其中,所述比较器实施正弦波 (交流)信号DV的二进制处理并生成矩形波的同步信号SYC,所述相位调节电路(移相器)实施同步信号SYC的相位调节。
此外,同步信号输出电路52向FLL电路130输出基准时钟信号CKF。例如,同步信号输出电路52包括实施正弦波信号DV的二进制处理的比较器。并且,例如使通过第一缓冲电路而对比较器的输出信号进行了缓冲的信号成为同步信号SYC,使通过第二缓冲电路而对比较器的输出信号进行了缓冲的信号成为基准时钟信号CKF。由此,基准时钟信号CKF与同步信号成为例如频率相同的信号。另外,也可以设置同步信号SYC的生成用的第一比较器和基准时钟信号CKF的生成用的第二比较器。
检测电路60包括放大电路61、同步检波电路81、滤波部90、A/D转换电路100、DSP部110。放大电路61接收来自振动片10的第一检测信号IQ1、第二检测信号IQ2,并实施电荷-电压转换或差动的信号放大或增益调节等。同步检波电路81根据来自驱动电路30的同步信号SYC而实施同步检波。滤波部90(低通滤波器)作为A/D转换电路100的前置滤波器而发挥功能。此外,滤波部90也作为使通过同步检波而未被除尽的无用信号衰减的电路而发挥功能。A/D转换电路100实施同步检波后的信号的A/D转换。DSP部110 对来自A/D转换电路100的数字信号实施数字滤波处理或数字补正处理等数字信号处理。作为数字补正处理存在例如零点补正处理或灵敏度补正处理等。
另外,例如作为来自振动片10的电荷信号(电流信号)的检测信号IQ1、 IQ2相对于作为电压信号的驱动信号DQ而相位滞后了90度。此外,在放大电路61的Q/V转换电路等中,相位滞后了90度。因此,放大电路61的输出信号相对于驱动信号DQ而相位滞后了180度。因此,通过利用例如驱动信号 DQ(DV)和同相的同步信号SYC而进行同步检波,从而能够对驱动信号DQ 去除相位延迟了90度的无用信号等。
10.移动体,电子设备
图20中的(A)中示出了包括本实施方式的电路装置20的移动体的示例。本实施方式的电路装置20例如能够装入汽车、飞机、摩托车、自行车、或者船舶等各种移动体中。移动体为具备例如发动机或电机等驱动机构、方向盘或舵等转向机构、以及各种电子设备,并在地上、空中、海上移动的设备或装置。图20中的(A)概要地图示了作为移动体的具体例的汽车206。在汽车206 上,装入具有振动片10和电路装置20的陀螺传感器510(传感器)。陀螺传感器510能够对车身207的姿态进行检测。陀螺传感器510的检测信号能够被供给至车身姿态控制装置208。车身姿态控制装置208能够根据例如车身 207的姿态而对悬架装置的软硬进行控制或者对每个车轮209的制动器进行控制。此外,这样的姿态控制能够被利用于双脚步行机器人、航空器、直升飞机等各种移动体中。为了实现姿态控制而能够安装陀螺传感器510。
如图20中的(B)、图20中的(C)所示,本实施方式的电路装置能够应用于数码照相机、生物体信息检测装置(穿戴式医疗设备。例如脉搏器、计步器、活动量仪等)等各种电子设备中。例如在数码照相机中,能够实施使用了陀螺传感器或加速度传感器的抖动校正等。此外,在生物体信息检测装置中,能够使用陀螺传感器或加速度传感器而对用户的身体活动进行检测,或者对运动状态进行检测。此外,如图20中的(D)所示,本实施方式的电路装置也能够应用于自动装置的可动部(手臂、关节)或主体部。机器人可以假定为移动体(行驶或步行自动装置)、电子设备(非行驶或非步行自动装置)中的任意一个。在行驶或步行自动装置的情况下,例如能够在自动行驶中利用本实施方式的电路装置。
另外,虽然以上述的方式对本实施方式进行了详细说明,但本领域技术人员能够很容易理解如下内容,即,能够实施在实体上不脱离本发明的新颖事项以及效果的多种改变。因此,这种改变例也全部被包含在本发明的范围中。例如,在说明书或附图中至少一次与更为广义或同义的不同用语(物理量信息、角速度传感器元件、物理量检测装置等)一起记载的用语(角速度信息、振动片、陀螺传感器等),在说明书或附图的任意位置处均能够置换为该不同的用语。此外,电路装置、物理量检测装置、电子设备、移动体的结构、振动片的结构等均不限定于本实施方式中所说明的内容,能够实施各种改变。
符号说明
1基部;2、3连结臂;4~7驱动腕;8、9检测臂;10振动片;12物理量传感器;20电路装置;30驱动电路;32放大电路;40增益控制电路;41 分频电路;42差分器;43环路滤波器;44加法器;45频率比较器;46延迟电路;48振荡器;50驱动信号输出电路;52同步信号输出电路;60检测电路;61放大电路;70时钟信号生成电路;72D/A转换电路;74电压控制振荡器;81同步检波电路;90滤波部;100A/D转换电路;110DSP部;130FLL 电路;131比较器;132频率比较器;133分频电路;134振荡器;135计数器;136环路滤波器;137积分器;139增益处理部;140控制部;142寄存器部;144输出部;146非易失性存储器;150运算处理部;155乘法处理部; 156积分处理部;160浮点积分器;162检测器;164定点积分器;166定点转换部;168寄存器;169寄存器;180放大电路;196可变电阻电路;197 可变电容电路;206汽车;207车身;208车身姿态控制装置;209车轮;500 电子设备;510陀螺传感器;520处理部;530存储器;540操作部;550显示部;CF乘法系数;CKF基准时钟信号;CTQ比较对象值;DQ驱动信号;DR 分频比;DVQ分频时钟信号;FR驱动频率;FU1熔丝元件;FV振荡频率;OSQ 时钟信号;R1电阻元件;SC基准值;TRM振荡频率设定值;TQ检测信号。
Claims (16)
1.一种电路装置,其特征在于,包括:
驱动电路,其对物理量传感器进行驱动;
锁频环电路,其包括频率比较器以及振荡器,并将来自所述驱动电路的信号作为基准时钟信号而生成时钟信号;
检测电路,其实施来自所述物理量传感器的检测信号的检测处理,
所述检测电路包括:
同步检波电路,其对基于所述检测信号而产生的信号进行同步检波;
A/D转换电路,其基于所述时钟信号而产生的工作用信号来工作,并且对基于来自所述同步检波电路的输出信号而产生的信号进行A/D转换,
在将从所述驱动电路所输出的驱动信号的频率设为FR,将从所述振荡器所输出的所述时钟信号的频率设为FV,将i设为1以上的整数,将j设为1以上的整数,将所述工作用信号的频率设为FV/i的情况下,
满足j×FR≠FV/i。
2.如权利要求1所述电路装置,其特征在于,
所述频率比较器包括分频电路和比较器,
所述分频电路对所述基准时钟信号进行分频,
所述比较器对比较对象值与所述比较对象值的基准值实施比较处理,所述比较对象值为,基于来自所述分频电路的分频时钟信号以及来自所述振荡器的所述时钟信号而取得的值。
3.如权利要求2所述的电路装置,其特征在于,
所述频率比较器包括计数器,所述计数器将通过利用所述时钟信号而对由所述分频时钟信号所规定的测量期间进行计数从而被测量出的计数值,作为所述比较对象值而输出。
4.如权利要求2或3所述的电路装置,其特征在于,
在将所述基准值设为SC,将所述分频电路的分频比设为DR的情况下,
满足FV=(SC/DR)×FR,并且所述(SC/DR)以满足j×FR≠FV/i的方式被设定。
5.如权利要求4所述的电路装置,其特征在于,
所述(SC/DR)为小数。
6.如权利要求4所述的电路装置,其特征在于,
所述SC为小数。
7.如权利要求1所述的电路装置,其特征在于,
所述振荡器包括阻容振荡电路,所述阻容振荡电路被设定有基于所述频率比较器的输出而得到的振荡频率设定值,并且根据所述振荡频率设定值而进行振荡。
8.如权利要求7所述的电路装置,其特征在于,
所述阻容振荡电路包括可变电容电路以及可变电阻电路中的至少一方,
通过根据所述振荡频率设定值而对所述可变电容电路的电容值或所述可变电阻电路的电阻值进行设定,从而对所述阻容振荡电路的振荡频率进行设定。
9.如权利要求7所述的电路装置,其特征在于,
所述阻容振荡电路包括可变电容电路和可变电阻电路,
所述可变电阻电路包括:
被串联连接的多个电阻元件;
多个熔丝元件,所述多个熔丝元件中的各个熔丝元件相对于所述多个电阻元件的各电阻元件而并联地被设置,
所述可变电容电路为根据所述振荡频率设定值而被设定电容值的电路。
10.如权利要求1所述的电路装置,其特征在于,
包括环路滤波器,所述环路滤波器被设置在所述频率比较器与所述振荡器之间。
11.如权利要求10所述的电路装置,其特征在于,
所述环路滤波器包括:
积分器,其对所述频率比较器的输出进行积分;
增益处理部,其对所述积分器的输出实施增益处理。
12.如权利要求1所述的电路装置,其特征在于,
所述检测电路包括数字信号处理部,所述数字信号处理部根据所述时钟信号而工作,并且对所述A/D转换电路的输出信号进行数字处理。
13.如权利要求1所述的电路装置,其特征在于,
包括控制部,所述控制部根据所述时钟信号而工作,并对所述驱动电路和所述检测电路进行控制。
14.一种物理量检测装置,其特征在于,包括权利要求1所述的电路装置和物理量传感器。
15.一种电子设备,其特征在于,包括权利要求1所述的电路装置。
16.一种移动体,其特征在于,包括权利要求1所述的电路装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-068078 | 2015-03-30 | ||
| JP2015068078A JP6589333B2 (ja) | 2015-03-30 | 2015-03-30 | 回路装置、電子機器及び移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106027043A CN106027043A (zh) | 2016-10-12 |
| CN106027043B true CN106027043B (zh) | 2021-02-05 |
Family
ID=57016354
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610188201.8A Active CN106027043B (zh) | 2015-03-30 | 2016-03-29 | 电路装置、电子设备以及移动体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9590642B2 (zh) |
| JP (1) | JP6589333B2 (zh) |
| CN (1) | CN106027043B (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6455174B2 (ja) * | 2015-01-22 | 2019-01-23 | セイコーエプソン株式会社 | 回路装置、電子機器、移動体及び物理量検出装置の製造方法 |
| JP6586735B2 (ja) | 2015-02-20 | 2019-10-09 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| JP6492739B2 (ja) * | 2015-02-20 | 2019-04-03 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| JP6862900B2 (ja) * | 2017-02-22 | 2021-04-21 | セイコーエプソン株式会社 | 回路装置、物理量測定装置、電子機器及び移動体 |
| JP6478207B2 (ja) * | 2017-03-10 | 2019-03-06 | ヒロテック株式会社 | Ifftクロック調整装置、ifftクロックの調整方法、およびデジタルテレビジョン放送装置 |
| JP2018163037A (ja) * | 2017-03-27 | 2018-10-18 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| CN107544617A (zh) * | 2017-07-27 | 2018-01-05 | 宏祐图像科技(上海)有限公司 | 一种用于serdes芯片的本地时钟产生方法及电路 |
| IT201700103058A1 (it) * | 2017-09-14 | 2019-03-14 | St Microelectronics Srl | Circuito e metodo di azionamento per un giroscopio mems e relativo giroscopio mems |
| JP7040253B2 (ja) * | 2018-04-20 | 2022-03-23 | セイコーエプソン株式会社 | 物理量センサーモジュール、傾斜計、慣性計測装置、構造物監視装置、及び移動体 |
| CN111642140B (zh) | 2019-01-02 | 2023-12-01 | 京东方科技集团股份有限公司 | 测量装置及测量方法 |
| CN111464182A (zh) * | 2020-04-29 | 2020-07-28 | 四川玖越机器人科技有限公司 | 一种巡检机器人 |
| US11418203B2 (en) * | 2020-09-16 | 2022-08-16 | Mediatek Singapore Pte. Ltd. | Frequency locked loops and related circuits and methods |
| KR102468771B1 (ko) * | 2021-03-17 | 2022-11-18 | 숭실대학교 산학협력단 | 단상 계통 연계형 인버터용 잠금 증폭기 기반의 주파수 추적형 고조파 제거 방법, 이를 수행하기 위한 기록 매체 및 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1947335A (zh) * | 2004-11-16 | 2007-04-11 | 罗姆股份有限公司 | Cr振荡电路及电子装置 |
| CN101272142A (zh) * | 2008-05-20 | 2008-09-24 | 曹秀娟 | 频率合成器 |
| CN102291125A (zh) * | 2010-06-15 | 2011-12-21 | 开曼晨星半导体公司 | 自动校准分数型锁相回路的快速锁相系统 |
| CN202153136U (zh) * | 2009-02-10 | 2012-02-29 | 松下电器产业株式会社 | 物理量传感器系统和物理量传感器装置 |
| JP6315531B1 (ja) * | 2017-11-09 | 2018-04-25 | 株式会社片山抜型製作所 | 打抜機用雌型および打抜機 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2752613B2 (ja) * | 1986-07-08 | 1998-05-18 | 日本電気株式会社 | クロツク再生回路 |
| US7711078B2 (en) * | 2007-06-01 | 2010-05-04 | Smsc Holdings Sarl | Frequency synchronization |
| JP2009162645A (ja) * | 2008-01-08 | 2009-07-23 | Panasonic Corp | 慣性速度センサ信号処理回路およびそれを備える慣性速度センサ装置 |
| JP4794596B2 (ja) * | 2008-04-04 | 2011-10-19 | パナソニック株式会社 | 物理量検出回路、物理量センサ装置 |
| JP5369525B2 (ja) | 2008-07-28 | 2013-12-18 | パナソニック株式会社 | Pll回路およびそれを用いた角速度センサ |
| JP5601292B2 (ja) | 2011-03-31 | 2014-10-08 | 株式会社デンソー | デジタル位相同期回路および物理量検出センサ |
| WO2012153448A1 (ja) * | 2011-05-09 | 2012-11-15 | パナソニック株式会社 | Rc発振回路 |
| JP6185741B2 (ja) * | 2013-04-18 | 2017-08-23 | ルネサスエレクトロニクス株式会社 | 周波数同期ループ回路及び半導体集積回路 |
| JP2016171493A (ja) * | 2015-03-13 | 2016-09-23 | セイコーエプソン株式会社 | 回路装置、電子機器及び移動体 |
-
2015
- 2015-03-30 JP JP2015068078A patent/JP6589333B2/ja active Active
-
2016
- 2016-03-28 US US15/082,319 patent/US9590642B2/en active Active
- 2016-03-29 CN CN201610188201.8A patent/CN106027043B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1947335A (zh) * | 2004-11-16 | 2007-04-11 | 罗姆股份有限公司 | Cr振荡电路及电子装置 |
| CN101272142A (zh) * | 2008-05-20 | 2008-09-24 | 曹秀娟 | 频率合成器 |
| CN202153136U (zh) * | 2009-02-10 | 2012-02-29 | 松下电器产业株式会社 | 物理量传感器系统和物理量传感器装置 |
| CN102291125A (zh) * | 2010-06-15 | 2011-12-21 | 开曼晨星半导体公司 | 自动校准分数型锁相回路的快速锁相系统 |
| JP6315531B1 (ja) * | 2017-11-09 | 2018-04-25 | 株式会社片山抜型製作所 | 打抜機用雌型および打抜機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9590642B2 (en) | 2017-03-07 |
| CN106027043A (zh) | 2016-10-12 |
| JP2016189514A (ja) | 2016-11-04 |
| US20160294397A1 (en) | 2016-10-06 |
| JP6589333B2 (ja) | 2019-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106027043B (zh) | 电路装置、电子设备以及移动体 | |
| CN102686976B (zh) | 角速度传感器 | |
| US10088333B2 (en) | Method and system for gyroscope real-time calibration | |
| JP6623616B2 (ja) | 回路装置、物理量センサー、発振器、電子機器及び移動体 | |
| CN102834695B (zh) | 物理量传感器 | |
| JP2017199947A (ja) | 回路装置、発振器、電子機器及び移動体 | |
| JP6641712B2 (ja) | 回路装置、電子機器及び移動体 | |
| JP2014215096A (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP6720687B2 (ja) | 回路装置、発振器、電子機器及び移動体 | |
| US10254115B2 (en) | Circuit device, physical quantity detection device, electronic apparatus, and moving object | |
| CN106817080A (zh) | 电路装置、振荡器、电子设备、移动体及振荡器的制造方法 | |
| US20170277585A1 (en) | Circuit device, physical quantity detection device, oscillator, electronic apparatus, vehicle, and method of detecting failure of master clock signal | |
| JP6772542B2 (ja) | 回路装置、発振器、電子機器及び移動体 | |
| US20160231119A1 (en) | System comprising a mechanical resonator and method therefor | |
| US20180278259A1 (en) | Circuit device, physical quantity measurement device, electronic device, and vehicle | |
| US11976923B2 (en) | Physical quantity detection circuit, physical quantity sensor, and operating method for physical quantity detection circuit | |
| US10401171B2 (en) | System comprising a mechanical resonator and method therefor | |
| CN111669124B (zh) | 振荡器、电子设备以及移动体 | |
| JP6561702B2 (ja) | 物理量検出システム、電子機器及び移動体 | |
| US10175044B2 (en) | Circuit device, physical quantity detection device, electronic apparatus, and moving object | |
| Chiu et al. | Active thermal compensation of MEMS based gyroscope | |
| JP6572585B2 (ja) | 回路装置、物理量検出装置、電子機器、移動体、回路装置の製造方法 | |
| JP2017085536A (ja) | 回路装置、発振器、電子機器及び移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |